Embed Size (px)
Citation preview
Nicht-KonformeFinite Elemente
Höherer Ordnung
— Diplomarbeit —
der Fakultät für Mathematikan der Technischen Universität Dortmund
vorgelegt von
Peter Zajac
Betreuer der Arbeit:
Prof. Dr. Stefan Turek

Hiermit versichere ich, dass ich die vorliegende Arbeit selbstständig verfasstund keine anderen als die angegebenen Quellen und Hilfsmittel benutzt sowieZitate kenntlich gemacht habe.
Dortmund, den

Inhaltsverzeichnis
1 Einführung 31.1 Aufbau der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2 Notationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2 Grundlagen aus der Funktional-Analysis 92.1 Bilinearformen und Lax-Milgram . . . . . . . . . . . . . . . . . . . . . . . . . 92.2 Sobolev-Räume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3 Integration und Differentation . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.4 Das Poisson-Problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3 Die Finite-Elemente-Methode 193.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 Das Gitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.3 Konstruktion von Ansatz-Räumen . . . . . . . . . . . . . . . . . . . . . . . . 263.4 Parametrische Ansatz-Räume . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4 Die Qk-Elemente 374.1 Die Knotenfunktionale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374.2 Die parametrische Standard-Variante: Qk . . . . . . . . . . . . . . . . . . . . 394.3 Die parametrische Variante mit Bubble: Qb
k . . . . . . . . . . . . . . . . . . . 424.4 Die nicht-parametrische Variante: Qn
k . . . . . . . . . . . . . . . . . . . . . . . 43
5 A-priori Fehler-Analyse 455.1 Das Berger-Scott-Strang-Lemma . . . . . . . . . . . . . . . . . . . . . . . . . 455.2 Das Bramble-Hilbert-Lemma . . . . . . . . . . . . . . . . . . . . . . . . . . . 505.3 Der Diskretisierungs-Fehler . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545.4 Der Konsistenz-Fehler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 635.5 Analyse der Qk-Elemente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6 Numerische Versuche 776.1 Versuche auf dem Einheits-Quadrat in 2D . . . . . . . . . . . . . . . . . . . . 776.2 Versuche auf dem Einheits-Würfel in 3D . . . . . . . . . . . . . . . . . . . . . 846.3 Versuche auf einem Quadrat mit Loch in 2D . . . . . . . . . . . . . . . . . . . 886.4 Versuche auf einem Ring in 2D . . . . . . . . . . . . . . . . . . . . . . . . . . 90
7 Abschluß 937.1 Ausblick: Die Zukunft der Qk-Elemente . . . . . . . . . . . . . . . . . . . . . 94
Literaturverzeichnis 95
1

2 INHALTSVERZEICHNIS
Kapitel 1
Einführung
Die Methode der Finiten Elemente hat sich als besonders vielseitiges und robustes Verfah-ren zur numerischen Lösung elliptischer partieller Differentialgleichungen etabliert und aufdiesem Gebiet die Methode der Finiten Differenzen weitestgehend abgelöst.
Im Gegensatz zu gewöhnlichen Differentialgleichungen besitzen partielle Differentialgleichun-gen in vielen Fällen keine klassische Lösung im Raum der stetig differenzierbaren Funktio-nen, wohingegen unter Zuhilfenahme der Sobolev-Raum-Theorie jedoch oft die Existenzeiner eindeutigen schwachen Lösung nachgewiesen werden kann. Diese Tatsache bildet denersten Ursprung des Erfolges der Finiten Elemente, denn diese gehen – im Gegensatz zurMethode der Finiten Differenzen – von einer schwachen Formulierung des Problems aus.Die Funktional-Analysis stellt hierbei ein breites Spektrum an Werkzeugen zur Verfügung,welche für die theoretischen Analysen der Finite Elemente Methode verwendet werden kön-nen. Insbesondere können auf diesem Wege auch äußerst komplexe Probleme theoretischuntersucht werden, ohne dabei jedoch Forderungen stellen zu müssen, welche viele praktischrelevante Szenarien auschließen.
Das zweite Erfolgs-Geheimnis der Finiten Elemente ist die Wahl, eine stückweise polyno-mielle Proximante der gesuchten Lösung einer partiellen Differentialgleichung zu berechnen.Einerseits erweist sich dies bei der praktischen Umsetzung des Verfahrens als vorteilhaft,denn die Unterteilung des Definitionsgebietes in kleinere Polyeder – vorzugsweise Simpli-zes oder Hyperwürfel – erlaubt es, die für den Umgang mit einer schwachen Formulierungnotwendige Integration der Basisfunktionen und ihrer partiellen Ableitungen auch auf kom-plexen Gebieten mit Hilfe von Quadraturformeln effizient und beliebig genau durchzuführen.Auf der anderen Seite ist diese Wahl auch für die a-priori Fehler-Analyse von fundamentalerBedeutung, denn stückweise polynomielle Räume führen – wie im skalaren Fall – auf eineApproximationsgüte von O(hk), womit die Methode der Finiten Elemente ein numerischesVerfahren beliebig hoher Ordnung darstellt.
Die Methode der Finiten Elemente wird in die beiden Klassen der konformen und der nicht-konformen Finite Elemente unterteilt, wobei die Letztere vor allem in der theoretischenAnalyse einen Zusatzaufwand erfordert. Allerdings ist die Verwendung einer konformen Fi-nite Elemente Methode in vielen Situationen aufgrund der Eigenschaften des zu lösendenProblems nicht oder nur mit großem Aufwand möglich, wohingegen nicht-konforme FiniteElemente häufig geeignete Kanditaten darstellen. Ein bekanntes Beispiel ist die inf-sup-Bedingung aus dem Bereich der Strömungsmechanik, welche für die eindeutige Lösbarkeitnotwendige Bedingungen an den zu verwendenden Ansatz-Raum stellt.
Eine Familie von nicht-konformen Ansatz-Räumen für die Finite Elemente Methode, derenHaupteinsatzgebiet die Strömungsmechanik bildet, wird zur Zeit intensiv am Institut fürAngewandte Mathematik und Numerik der Technischen Universität Dortmund in Zusam-menarbeit mit dem Institut für Analysis und Numerik der Universität Magdeburg erforscht
3
4 KAPITEL 1. EINFÜHRUNG
und weiterentwickelt. In dieser Arbeit wollen wir eben diese Ansatz-Räume in drei Vari-anten vorstellen, wobei der Schwerpunkt dieser Arbeit in der a-priori Fehler-Analyse fürnicht-konforme Finite-Elemente und der Herleitung der dazu notwendigen Theorie liegenwird.
1.1 Aufbau der Arbeit
Kapitel 1 enthält neben der Einleitung und dieser Übersicht im folgenden Abschnitt eineAuflistung von Notationen und grundlegenden Definitionen, welche in dieser Arbeit häufigverwendet werden, jedoch keiner tiefgehenden Erklärung bedürfen.
Kapitel 2 wird sich mit den wichtigsten Grundlagen aus der Funktional-Analysis beschäf-tigen, welche für die Herleitung der Finite-Elemente-Methode sowie ihrer anschließenden a-priori Fehler-Analyse nötig sind. Hierbei werden die Sätze und Definitionen in an unsereBedürfnisse angepassten Einschränkungen angegeben, wobei – mit Ausnahme einiger kurzerKorollare – für die Beweise auf die Fachliteratur verwiesen wird. Dieses Kapitel, begin-nend mit dem Lax-Milgram-Theorem, ist hierbei thematisch geordnet, wobei vor allem dieSobolev-Räume Hk genauer betrachtet werden, um im letzten Abschnitt mit der Poisson-Gleichung ein Modell-Problem der elliptischen Differentialgleichungen in eine schwache For-mulierung zu übersetzen.
Kapitel 3 beginnt, ausgehend vom Modell-Problem der Poisson-Gleichung, mit Hilfe desCéa-Lemmas sowie einiger praktisch veranlagter Überlegungen, mit der Motivation und Her-leitung der (konformen) Finite-Elemente-Methode. Im Hinblick auf die Konstruktion vongeeigeneten Ansatz-Räumen wird anschließend definiert, was unter einem Gitter zu verste-hen ist, und darüber hinaus grundlegende Eigenschaften wie beispielsweise die Konformitätbesprochen.Aufbauend auf der Motivation und der Definition des Gitters wird die Konstruktion derAnsatz-Räume für die Finite-Elemente-Methode sowie einer dazugehörigen Basis zunächstanhand eines einfachen Beispiels hergeleitet und untersucht, um die so erlangten Erkennt-nisse anschließend mit dem Begriff des Knotenfunktionals auf allgemeinere Ansatz-Räumeübertragen.Im letzten Abschnitt des Kapitels wird der Spezialfall der parametrischen Ansatz-Räumebetrachtet und auf die dafür aus theoretischer sowie praktischer Sicht relevanten Eigenschaf-ten eingegangen.
In Kapitel 4 werden drei Varianten eines nicht-konformen Ansatz-Raumes für die Fini-te-Elemente-Methode präsentiert, welche zum aktuellen Zeitpunkt einen Gegenstand derForschung darstellen. Hierbei werden mit Hilfe der in Kapitel 3 erarbeiteten Charakterisie-rungen zwei parametrische sowie eine nicht-parametrische Variante vorgestellt.
Kapitel 5 ist der a-priori Fehler-Analyse für die Finite-Elemente-Methode gewidmet. ImGegensatz zu der üblichen Vorgehensweise, die a-priori Fehler-Analyse für einen bestimm-ten Ansatz-Raum durchzuführen, wird die dafür notwendige Theorie in einer sehr allgemeinanwendbaren Form ausgearbeitet, womit sie nicht nur für die Analyse der in Kapitel 4 vorge-stellten Ansatz-Räume von Interesse ist, sondern eine wesentlich größere Klasse von Ansatz-Räumen abdeckt.Im ersten Abschnitt dieses Kapitels wird mit dem Berger-Scott-Strang-Lemma eine Verall-gemeinerung des in Kapitel 3 zur Motivation genutzten Céa-Lemmas hergeleitet, welchesdie Fehler-Analyse für nicht-konforme Ansatz-Räume auf die getrennte Betrachtung desDiskretisierungs- und des Konsistenz-Fehlers zurückführt.Im Anschluß ist dem Bramble-Hilbert-Lemma ein eigener Abschnitt gewidmet, da dieses fürdie darauf folgenden Analysen von nahezu unersetzlichem Wert sein wird, wobei das Lemmaaus einer wichtigen Ungleichung hergeleitet wird.In den beiden darauf folgenden Abschnitten werden die Diskretisierungs- und Konsistenz-

1.2. NOTATIONEN 5
Fehler analysiert, sowie hinreichende Voraussetzungen ausgearbeitet, unter welchen eine Ab-schätzung der beiden Fehler-Terme möglich ist. Im Falle des Diskretisierungs-Fehlers werdenhierbei insbesondere die parametrischen Ansatz-Räume in Betracht gezogen, da die Abschät-zung hierbei auf einige einfach zu überprüfende Voraussetzungen zurückgeführt werden kann.Zum Abschluß wird die im gesamten Kapitel ausgearbeitete Theorie benutzt, um eine Feh-ler-Abschätzung für die in Kapitel 4 vorgestellten Ansatz-Räume zu erhalten.
In Kapitel 6 werden die a-priori Fehler-Abschätzungen für die in Kapitel 4 vorgestell-ten Ansatz-Räume in einigen einigen numerischen Versuchen überprüft. Hierbei werden inzwei und drei Dimensionen Rechnungen auf verschiedenen Gittern durchgeführt, welche dieaus der a-priori Fehler-Analyse geforderten Voraussetzungen ganz, zum Teil oder gar nichterfüllen. Die numerischen Versuche werden hierbei die Abschätzungen aus der Theorie veri-fizieren, aber auch zeigen, dass die Verletzung der aus der Theorie stammenden Forderungenden Verlust der erwünschten Abschätzungen zu Folge hat.
1.2 Notationen
Wir wollen in diesem Abschnitt einige grundlegende Notationen, Konventionen und Defini-tionen angeben, welche wir in dieser Arbeit verwenden möchten.
Um der üblichen Konfusion bzgl. der Definition der natürlichen Zahlen N vorzubeugen,verwenden wir die Konvention
N :={1, 2, 3, . . .
},
N0 :={0, 1, 2, . . .
}.
Mit δji bezeichnen wir das Kronecker-Delta, d.h.
δji :=
{1 für i = j
0 sonst
Mit �·�, �·� : R→ Z bezeichnen wir die Gauss-Klammern:
�x� := max{z ∈ Z
∣∣ z ≤ x},
�x� := min{z ∈ Z
∣∣ z ≥ x}.
Mengen, Hüllen und Bälle
Für eine beliebige Menge X bezeichnen wir mit card(X) die Kardinalität von X , sowie mit
℘(X) :={Y ⊆ X
}die Potenz-Menge von X .Für eine endliche Menge von Vektoren X := {v1, . . . , vm} ⊂ V aus einem reellen VektorraumV bezeichnen wir die lineare Hülle (auch Spann genannt) von X mit
span(X) :={ m∑
i=1
ai · vi∣∣∣ a1, . . . , am ∈ R
},
sowie die konvexe Hülle von X mit
conv(X) :={ m∑
i=1
ai · vi∣∣∣ a1, . . . , am ∈ [0, 1] :
m∑i=1
ai = 1}.

6 KAPITEL 1. EINFÜHRUNG
Desweiteren definieren wir die innere konvexe Hülle von V mit
conv∗(X) :={ m∑
i=1
ai · vi∣∣∣ a1, . . . , am ∈ (0, 1) :
m∑i=1
ai = 1}.
Für ein ε > 0 und ein ξ ∈ Rn bezeichnen wir mit
Bε(ξ) :={x ∈ R
n∣∣∣ ‖x− ξ‖2 < ε
}den offenen Ball vom Radius ε um ξ.Für eine beschränkte Menge Ω ⊂ R
n bezeichnen wir den Durchmesser (engl.: diameter) vonΩ mit
diam(Ω) := 2 · inf{ε > 0
∣∣∣ ∃ξ ∈ Rn : Ω ⊆ Bε(ξ)
}.
Funktionen-Räume
Für eine Funktion ϕ : Ω �→ R bezeichnen wir den Träger (engl. support) von ϕ mit
supp(ϕ) :={x ∈ Ω
∣∣∣ ϕ(x) �= 0},
Für Ω ⊆ Rn offen sei
C∞c (Ω) :={ϕ ∈ C∞(Ω)
∣∣∣ ∃K ⊂ Ω kompakt : supp(ϕ) ⊂ K}
der Raum der C∞-Funktionen, deren Träger kompakt in Ω enthalten ist.Für ein Ω ⊂ R
n offen und beschränkt bezeichnen wir mit
L2(Ω) :={u : Ω→ R
∣∣∣ ˆΩ
u2(x) dx <∞},
den Hilbert-Raum der im Lebesque-Sinne quadrat-integrierbaren Funktionen und für u, v ∈L2(Ω) bezeichnen mit
〈u, v〉L2(Ω) :=
ˆΩ
u(x) · v(x) dx,
‖u‖L2(Ω) :=√〈u, u〉L2(Ω)
das L2-Skalarprodukt sowie die daraus induzierte L2-Norm.
Multiindizes und Polynome
Für einen Multiindex α = (α1, . . . , αn) ∈ Nn0 definieren wir die Fakultät
α! :=
n∏i=1
αi!
sowie den Absolut- und Maximal-Betrag
|α| :=
n∑i=1
αi,
|α|∞ := max1≤i≤n
{αi
}.
Für zwei Multiindizes α, β ∈ Nn0 gelten hierbei für die komponentenweise Summe die Regeln
|α+ β| = |α| + |β|,|α+ β|∞ ≤ |α|∞ + |β|∞.

1.2. NOTATIONEN 7
Für k ∈ N0 bezeichnen wir mit
Pnk := span
{R
n � x �→n∏
i=1
xαi
i
∣∣∣ α ∈ Nn0 , |α| ≤ k
},
Qnk := span
{R
n � x �→n∏
i=1
xαi
i
∣∣∣ α ∈ Nn0 , |α|∞ ≤ k
}die Vektorräume der Polynome vom Absolut- bzw. Maximal-Grad ≤ k über dem R
n. Hierbeigilt für k ∈ N0 mit l :=
⌊kn
⌋die Teilraum-Beziehung
Qnl ⊆ Pn
k ⊆ Qnk .

8 KAPITEL 1. EINFÜHRUNG
Kapitel 2
Grundlagen aus derFunktional-Analysis
2.1 Bilinearformen und Lax-Milgram
In diesem ersten und kurzen Abschnitt wollen wir ein wichtiges Theorem aus der Funktio-nalanalysis zitieren, welches uns als theoretische Grundlage für diese Arbeit dienen soll. Wirwollen, um das Theorem formulieren zu können, zuerst zwei notwendige Eigenschaften vonBilinearformen definieren.
Definition 2.1.1Sei H ein reeller Hilbert-Raum. Eine Bilinearform a : H × H → R heißt stetig, falls einc > 0 existiert, so dass
|a(u, v)| ≤ c‖u‖‖v‖ ∀u, v ∈ H. (2.1)
Definition 2.1.2Sei H ein reeller Hilbert-Raum. Eine Bilinearform a : H ×H → R heißt koerziv1, falls einc > 0 existiert, so dass
a(u, u) ≥ c‖u‖2 ∀u ∈ H. (2.2)
Wir können nun mit Lax-Milgram ein wahres Bilder-Buch-Theorem formulieren, denn esliefert für ein allgemein formuliertes Problem unter geringen Voraussetzungen eine starkeAussage.
Theorem 2.1.3: Lax-MilgramSei H ein reeller Hilbert-Raum, und es sei a : H × H → R eine stetige und koerziveBilinearform. Dann gibt es für jede stetige Linearform b : H → R genau ein u ∈ H , so dass
a(u, ϕ) = b(ϕ) ∀ϕ ∈ H. (2.3)
Beweis.vgl. [10, Satz 9.1] �
Das Lax-Milgram-Theorem besagt also, dass jedes Problem, welches mit einer koerziven undstetigen Bilinearform a auf die Form in (2.3) zurückgeführt werden kann, eine eindeutigeLösung besitzt. Unser Ziel in diesem Kapitel ist es, Grundlagen zu schaffen, mit denen wireine elliptische partielle Differentialgleichung auf genau diese vom Lax-Milgram-Theoremgeforderte Form bringen können. Zum Einen erhalten wir damit die eindeutige Lösbarkeit
1Eine koerzive Bilinearform wird oft auch als elliptische Bilinearform bezeichnet.
9

10 KAPITEL 2. GRUNDLAGEN AUS DER FUNKTIONAL-ANALYSIS
der Differentialgleichung und – was im Rahmen dieser Arbeit von besonderem Interesse ist– zum Anderen können wir aus der Formulierung (2.3) konstruktiv eine ganze Klasse vonnumerischen Verfahren herleiten, welche die exakte Lösung u beliebig genau approximierenkönnen: Die Finite-Elemente-Methode.
2.2 Sobolev-Räume
Wir benötigen im Hinblick auf das Lax-Milgram-Theorem sowie für die Analysen in den fol-genden Kapiteln einige theoretische Grundlagen über schwache Ableitungen und Sobolev-Räume, welche wir in diesem Abschnitt angeben möchten. Wir beschränken uns hierbeijedoch auf die Definitionen und Sätze, welche für diese Arbeit von Interesse sein werden,und verweisen den interessierten Leser für die tiefere Verständnis der Sobolev-Raum-Theoriean die Fachliteratur, z.B. [4], [5], [6] und [7].Wir möchten zunächst definieren, was unter einer schwachen partiellen Ableitung zu verste-hen ist.
Definition 2.2.1: schwach partiell differenzierbarEs sei Ω ⊂ R
n offen, beschänkt und nicht leer. Es seien u, v ∈ L2(Ω) und i ∈ {1, . . . , n}. Wirsagen, v ist die schwache partielle Ableitung von u nach der i-ten Koordinate undschreiben
v = ∂iu, (2.4)
falls ˆΩ
u · ϕ = −ˆΩ
v · dϕdxi
∀ϕ ∈ C∞c (Ω). (2.5)
Wir sagen, ein u ∈ L2(Ω) ist schwach partiell differenzierbar, falls für jedes 1 ≤ i ≤ nein v ∈ L2(Ω) existiert, so dass (2.5) gilt.
Wir können mit Hilfe der vorangegangenen Definition in Analogie zu den Ck-Räumen denRaum der k-mal schwach partiell differenzierbaren Funktionen definieren. Wir wollen hier-bei nicht die allgemeinen Wk,p-Räume (vgl. z.B. [10, Abschnitt 5]) betrachten, sondernbeschränken uns auf die Hilbert-Räume Hk, welche wir nun definieren wollen.
Definition 2.2.2: Sobolev-RäumeSei Ω ⊂ R
n offen, beschränkt und nicht leer. Wir definieren
H1(Ω) :={u ∈ L2(Ω)
∣∣∣ u schwach partiell diff’bar}. (2.6)
und für k ∈ N, k ≥ 2 induktiv
Hk(Ω) :={u ∈ H1(Ω)
∣∣∣ ∀ 1 ≤ i ≤ n : ∂iu ∈ Hk−1(Ω)}
(2.7)
und setzen zur Vervollständigung
H0(Ω) := L2(Ω).
Für einen Multiindex α ∈ Nn0 mit |α| ≤ k bezeichnen wir mit
Dαu := ∂α11 ◦ · · · ◦ ∂αn
n ◦ u (2.8)
die Mehrfachableitung von u zum Multiindex α.Desweiteren definieren wir für k ∈ N0 mit
|u|Hk(Ω) :=( ∑
|α|=k
‖Dαu‖2L2(Ω)
) 12
(2.9)
2.2. SOBOLEV-RÄUME 11
die Hk-Halbnorm1 sowie mit
‖u‖Hk(Ω) :=( k∑
i=0
|u|2Hi(Ω)
) 12
(2.10)
die Hk-Norm. Hierbei gilt
‖u‖L2(Ω) = ‖u‖H0(Ω) = |u|H0(Ω).
Die Räume Hk lassen sich prinzipiell für jedes offene Ω ⊆ Rn definieren, jedoch gibt es einen
sehr wichtigen Spezialfall: die sog. Lipschitz-Gebiete.
Definition 2.2.3: Lipschitz-GebietSei Ω ⊂ R
n offen, beschränkt und nicht leer. Wir sagen, Ω ist ein Lipschitz-Gebiet, falls∂Ω sich in jedem Punkt lokal als Graph einer Lipschitz-stetigen Funktion darstellen lässt.
Ohne die Bedingung, dass Ω ein Lipschitz-Gebiet sein soll, lassen sich viele wichtige Eigen-schaften von Hk-Funktionen nicht nachweisen. Der erste für uns wichtige Satz, welcher einLipschitz-Gebiet voraussetzt, ist der Spursatz. Dieser besagt, dass, obwohl H1-Funktionennur bis auf Nullmengen eindeutig sind, wir trotzdem von „Randwerten“ einer H1-Funktionsprechen können.
Satz 2.2.4: SpursatzEs sei Ω ⊂ R
n ein Lipschitz-Gebiet, dann existiert ein eindeutig bestimmter stetiger undlinearer Operator
trace : H1(Ω) �→ L2(∂Ω),
so dass für alle u ∈ H1(Ω) ∩ C0(Ω) gilt
trace(u) = u|∂Ω.
Darüber hinaus gilt für u, v ∈ H1(Ω) die Regel
trace(u · v) = trace(u) · trace(v) (2.11)
Beweis.vgl. [4, Satz A6.6, (A6-10)] �
Bemerkung: Es sei an dieser Stelle erwähnt, dass die Aussage in (2.11) nicht-trivial ist, dennfür u, v ∈ H1(Ω) ist u·v nicht notwendigerweise inH1(Ω) und somit ist der Begriff trace(u·v)überhaupt nicht definiert2.
Satz 2.2.5Seien X,Y zwei normierte Vektor-Räume und es sei f : X → Y linear. Es existiert ein c > 0,so dass
‖f(x)‖Y ≤ c · ‖x‖X ∀ x ∈ X
genau dann wenn f stetig ist.
Beweis.vgl. [8, Satz 112.1] �
1Eine Halb-Norm | · | erfüllt alle Eigenschaften einer Norm mit der Ausnahme, dass |u| = 0 nichtnotwendigerweise u = 0 impliziert.
2Dieses Problem lässt sich lösen, indem man den Spursatz für die allgemeineren W1,p-Räume formuliert– wir wollen uns hier aber mit dieser „Rechen-Regel“ begnügen.

12 KAPITEL 2. GRUNDLAGEN AUS DER FUNKTIONAL-ANALYSIS
Aus den beiden vorherigen Sätzen können wir nun ein wichtiges Korollar formulieren. NachSatz 2.2.4 ist der Spuroperator eine lineare und stetige Abbildung, womit wir nach Satz2.2.5 eine Norm-Abschätzung erhalten.
Korollar 2.2.6Es sei Ω ⊂ R
n ein Lipschitz-Gebiet, dann existiert ein 0 < c = c(Ω) so dass für jedesu ∈ H1(Ω) die Abschätzung
‖trace(u)‖L2(∂Ω) ≤ c · ‖u‖H1(Ω)
gilt.
Mit dem Spur-Operator können wir einen Raum definieren, welcher für uns im weiterenVorgehen von enormer Wichtigkeit sein wird, nämlich den Raum der H1(Ω)-Funktionen,deren Spur Null ist.
Definition 2.2.7Sei Ω ⊂ R
n ein Lipschitz-Gebiet, dann bezeichnen wir mit
H10(Ω) :=
{u ∈ H1(Ω)
∣∣∣ trace(u) = 0}
(2.12)
den Raum der H1(Ω)-Funktionen, deren Spur Null ist.
Wir wollen nun eine fundamentale Ungleichung anbringen: Wir können die L2-Norm einerFunktion u ∈ H1
0(Ω) gegen ihre H1-Halbnorm abschätzen.
Satz 2.2.8: Friedrichs-UngleichungSei Ω ⊂ R
n ein Lipschitz-Gebiet, dann gilt für jedes u ∈ H10(Ω)
|u|H0(Ω) ≤ diam(Ω) · |u|H1(Ω). (2.13)
Beweis.vgl. [3, Satz II.1.5] �
Mit der Friedrichs-Ungleichung können wir jetzt sehr einfach nachweisen, dass auf dem RaumH1
0(Ω) die H1-Halbnorm sogar zu einer Norm wird. Dies wird im Hinblick auf den Nachweisder Koerzivität und der Stetigkeit von Bilinearformen a : H1
0(Ω) × H10(Ω) → R für das
Lax-Milgram-Lemma von Bedeutung sein.
Korollar 2.2.9Sei Ω ⊂ R
n ein Lipschitz-Gebiet, dann ist auf dem Raum H10(Ω) die H1-Halbnorm eine
Norm.
Beweis.Da | · |H1(Ω) bereits eine Halbnorm ist, bleibt nur noch zu zeigen, dass für u ∈ H1
0(Ω) aus|u|H1(Ω) = 0 direkt u = 0 folgt.Sei also u ∈ H1
0(Ω) beliebig, dann gilt nach Satz 2.2.8
diam(Ω)−1 · ‖u‖L2(Ω)
(2.13)≤ |u|H1(Ω),
und somit|u|H1(Ω) = 0 =⇒ ‖u‖L2(Ω) = 0 =⇒ u = 0.
�

2.3. INTEGRATION UND DIFFERENTATION 13
2.3 Integration und Differentation
Wir wollen nun einige bekannte Sätze zur Integration und Differentation zitieren, welchedem Leser aus den einführenden Vorlesungen der Analysis bekannt sein sollten. Wir wollenhierbei zeigen, dass einige wichtige Werkzeuge, wie z.B. die Kettenregel oder der Gauß’scheIntegralsatz, auch für Sobolev-Räume ihre Gültigkeit behalten.
Definition 2.3.1: DiffeomorphismusSei n ∈ N und seien Ω, Ω ⊂ R
n offen und nicht-leer, und ferner sei k ∈ N0 ∪ {∞}. Einebijektive Abbildung f : Ω → Ω ist ein Ck-Diffeomorphismus, falls f ∈ Ck(Ω) und f−1 ∈Ck(Ω).
Wir wollen nun die Ketten-Regel für die Differentation von H1-Funktionen zitieren, schrän-ken uns hierbei auf den Fall ein, dass die „innere“ Funktion ein C1-Diffeomorphismus seinsoll – dies wird für unsere Ansprüche genügen.
Satz 2.3.2: Ketten-RegelSeien Ω, Ω ⊂ R
n zwei Lipschitz-Gebiete. Ferner sei f : Ω → Ω ein C1-Diffeomorphismus,dann ist für jedes u ∈ H1(Ω) auch u ◦ f ∈ H1(Ω) und es gilt die Ketten-Regel
∇(u ◦ f
)=
(Df
)� · (∇u) ◦ f. (2.14)
Beweis.vgl. [4, Satz 2.25] �
Ein weiterer wichtiger Satz ist die Aussage über die lokale Invertierbarkeit, welche wir imZusammenspiel mit der Kettenregel benutzen werden. Da wir diesen Satz nur für die innereFunktion f der Ketten-Regel benötigen werden, können wir uns auch hier auf den Fall vonC1-Diffeomorphismen einschränken.
Satz 2.3.3: Lokale InvertierbarkeitSei n ∈ N und seien Ω, Ω ⊂ R
n offen und nicht-leer. Ferner sei f : Ω→ Ω ein C1-Diffeomor-phismus. Ist für ein x ∈ Ω die Jacobi-Matrix Df(x) von f regulär, so ist für x := f(x) auchdie Jacobi-Matrix Df−1(x) von f−1 regulär und es gilt
Df−1(x) =(Df)−1(x). (2.15)
Insbesondere gilt in diesem Fall für die Funktional-Determinanten Jf (x) := | det(Df(x))|von f und Jf−1(x) := | det(Df−1(x))| von f−1:
Jf−1(x) =(Jf (x)
)−1. (2.16)
Beweis.vgl. [8, Satz 171.1] �
Wir werden häufig über Gebiete Ω integrieren müssen, welche über eine Transformationeines anderen Gebietes Ω definiert sind. Hierfür benötigen wir die Transformations-Formel.
Satz 2.3.4: Trafo-FormelSeien n ≤ m ∈ N und es sei Ω ⊂ R
n ein Lipschitz-Gebiet. Ferner sei f ∈ C1(Ω,Rm
)injektiv
und beschränkt, dann gilt mit Ω := f(Ω) für jedes u ∈ L1(Ω) die Trafo-Formelˆ˜Ω
u(x) dx =
ˆΩ
Jf (x) · u(f(x)
)dx, (2.17)

14 KAPITEL 2. GRUNDLAGEN AUS DER FUNKTIONAL-ANALYSIS
wobei Jf die Funktional-Determinante von f bezeichne:
Jf (x) :=√det
(Df(x)� ·Df(x)
). (2.18)
Ist n = m, so vereinfacht sich Jf zu
Jf (x) =∣∣ det (Df(x))∣∣.
Beweis.vgl. [8, Satz 213.2] �
Ein Satz, welcher in den Sobolev-Räumen eine wichtige Rolle spielt, ist der Gauß’sche Inte-gralsatz, und wir wollen nun den folgenden Satz formulieren, welcher uns für H1-Funktionenauf Lipschitz-Gebieten die zum Gauß’schen Integralsatz äquivalente Partielle Integrationliefert.
Satz 2.3.5: Gauß’scher Integralsatz / Partielle IntegrationSei Ω ⊂ R
n ein Lipschitz-Gebiet, und es seien u, v ∈ H1(Ω). Dann gilt für 1 ≤ i ≤ n mitdem äußeren Normalenvektor η = (η1, . . . , ηn)
� an ∂Ω die IdentitätˆΩ
∂iu · v +ˆΩ
u · ∂iv =
ˆ∂Ω
u · v · ηi. (2.19)
Beweis.vgl. [4, Satz A6.8] �
Bemerkung: Es ist nicht offensichtlich, dass wir für Lipschitz-Gebiete Ω überhaupt von einemNormalen-Vektor η auf ∂Ω sprechen können, da diese nicht notwendigerweise einen C1-Randbesitzen. Dennoch ist für Lipschitz-Gebiete Ω der Normalen-Vektor η fast überall auf ∂Ωdefiniert, womit das rechte Integral in (2.19) wohldefiniert ist (vgl. [4, A6.5〈3〉]).
2.4 Das Poisson-ProblemDie Poisson-Gleichung stellt ein Modellproblem für elliptische partielle Differentialgleichun-gen dar, weshalb sie in der Theorie für die Herleitung und die Analyse von Lösungsansätzenäußerst beliebt ist. Wir wollen die Poisson-Gleichung in diesem Abschnitt zunächst in ihrerursprünglichen Formuliereung vorstellen und diese anschließend mit den Hilfsmitteln ausden vorherigen Abschnitten umformulieren, so dass wir das Lax-Milgram-Theorem anwen-den können.
Problem 2.4.1: (starke) Poisson-GleichungEs sei Ω ⊂ R
n offen und beschränkt, und ferner sei f ∈ C0(Ω).Finde u ∈ C0(Ω) ∩ C2(Ω), so dass
−Δu(x) = f(x) ∀x ∈ Ω (2.20)u(x) = 0 ∀x ∈ ∂Ω, (2.21)
wobei Δ : C2(Ω)→ C0(Ω) den Laplace-Operator
Δu(x) :=
n∑i=1
d2
dx2iu(x)
bezeichnet.
Wir haben in Abschnitt 2.2 definiert, was wir unter schwachen Ableitungen verstehenwollen. Mit Hilfe dieser können wir die starke Poisson-Gleichung aus Problem 2.4.1 in einProblem mit schwachen Ableitungen umformulieren.

2.4. DAS POISSON-PROBLEM 15
Problem 2.4.2Es sei Ω ⊂ R
n ein Lipschitz-Gebiet, und ferner sei f ∈ L2(Ω).Finde u ∈ H2(Ω), so dass
−Δu = f in Ω (2.22)trace(u) = 0 auf ∂Ω, (2.23)
wobei Δ : H2(Ω)→ L2(Ω) den schwachen Laplace-Operator
Δu :=
n∑i=1
∂2i u
bezeichnet.
Wir haben nun ein Problem im Sobolev-RaumH2(Ω) erhalten, allerdings sind wir noch weitvon einer Problem-Stellung entfernt, welche wir mit dem Lax-Milgram-Theorem bearbeitenkönnen. Insbesondere fehlt eine Bilinearform a, welche wir auf Stetigkeit und Koerzivitätüberprüfen können.
Hilfssatz 2.4.3Es sei H ein Hilbert-Raum, und es seien u, v ∈ H . Dann gilt:
u = v ⇐⇒ 〈u− v, ϕ〉 = 0 ∀ϕ ∈ H
Beweis.„=⇒“: Sei u = v ∈ H , dann gilt für ϕ ∈ H beliebig
u− v = 0 =⇒ 〈u− v, ϕ〉 = 0.
„⇐=“: Seien u, v ∈ H so dass
〈u − v, ϕ〉 = 0 ∀ϕ ∈ H.
Setze nun ϕ := u− v ∈ H , dann ist
〈u − v, u− v〉 = 0
und die Positivität des Skalarproduktes impliziert nun u− v = 0, also u = v. �
Wir wollen nun unser Problem 2.4.2 mit Hilfe des L2-Skalarproduktes umformulieren,beschränken uns allerdings darauf, nur die Gleichung (2.22) zu ersetzen und behalten dieRandwert-Gleichung (2.23) bei.
Problem 2.4.4Es sei Ω ⊂ R
n ein Lipschitz-Gebiet, und ferner sei f ∈ L2(Ω).Finde u ∈ H2(Ω), so dass
−ˆΩ
Δu · ϕ =
ˆΩ
f · ϕ ∀ϕ ∈ L2(Ω) (2.24)
trace(u) = 0 auf ∂Ω (2.25)
Nun wollen uns überlegen, dass die Gleichung (2.24) insbesondere für alle ϕ ∈ H1(Ω) giltund eine Einschränkung auf diesen Raum erlaubt es uns die Gleichung partiell zu integrieren,womit wir das folgende Problem erhalten.

16 KAPITEL 2. GRUNDLAGEN AUS DER FUNKTIONAL-ANALYSIS
Problem 2.4.5Es sei Ω ⊂ R
n ein Lipschitz-Gebiet, und ferner sei f ∈ L2(Ω).Finde u ∈ H2(Ω), so dass
ˆΩ
∇u · ∇ϕ−ˆ∂Ω
∇u · ϕ · η =
ˆΩ
f · ϕ ∀ϕ ∈ H1(Ω) (2.26)
trace(u) = 0 auf ∂Ω (2.27)
Wir müssen uns darüber im Klaren sein, dass die Probleme (2.24) und (2.26) nicht mehr äqui-valent sind, allerdings gilt nach unseren bisherigen Überlegungen immer noch: Ist u ∈ H2(Ω)eine Lösung von Problem 2.4.4, so löst u auch das Problem 2.4.5. Die Umkehrung giltjedoch nicht notwendigerweise, da wir nun nicht mehr alle ϕ ∈ L2(Ω) betrachten. Darüberhinaus ist die Gleichung (2.26) schon für u ∈ H1(Ω) wohldefiniert, die Gleichung (2.24) setztu ∈ H2(Ω) voraus. Analog zur vorherigen Überlegung gilt die Gleichung (2.26) insbesonderefür alle ϕ ∈ H1
0(Ω), womit der Rand-Integral-Term verschwindet, falls wir uns auf diesenRaum einschränken.
Problem 2.4.6: (schwache) Poisson-GleichungSei Ω ⊂ R
n ein Lipschitz-Gebiet, und ferner sei f ∈ L2(Ω).Finde ein u ∈ H1
0(Ω), so dassˆΩ
∇u · ∇ϕ =
ˆΩ
f · ϕ ∀ϕ ∈ H10(Ω) (2.28)
Wir haben in den letzten zwei Umformulierungen den Raum der Test-Funktionen ϕ vonL2(Ω) auf H1
0(Ω) eingeschränkt. Und auch hier gilt wieder: Ist u ∈ H1(Ω) eine Lösung vonProblem 2.4.5, so löst u auch das Problem 2.4.6. Wir wollen nun einen Satz anbringen,welcher besagt, dass eine Lösung u von Problem 2.4.6 trotz unserer Einschränkungen auchdas Problem 2.4.4 löst – vorausgesetzt u ist in H2(Ω).
Satz 2.4.7Sei u ∈ H1
0(Ω) ∩ H2(Ω) eine Lösung von Problem 2.4.6, dann löst u auch das Problem2.4.4.
Beweis.vgl. [3, Beispiel II.2.10] �
Nach dieser Kette von Umformulierungen und Einschränkungen haben wir nun die Poisson-Gleichung auf eine zum Lax-Milgram-Theorem kompatible Form gebracht, denn mit
a(u, ϕ) :=
ˆΩ
∇u · ∇ϕ (2.29)
erhalten wir eine Bilinearform a : H10(Ω)×H1
0(Ω)→ R und mit
b(ϕ) :=
ˆΩ
f · ϕ (2.30)
eine Linearform b : H10(Ω)→ R, womit wir die schwache Poisson-Gleichung (2.28) als
a(u, ϕ) = b(ϕ) ∀ϕ ∈ H10(Ω)
schreiben können. Wir wollen nun nachweisen, das dieses Paar die Voraussetzungen vonTheorem 2.1.3 erfüllt.
Satz 2.4.8Die Bilinearform a aus (2.29) ist stetig und koerziv auf H1
0(Ω) mit der Norm | · |H1(Ω).
2.4. DAS POISSON-PROBLEM 17
Beweis.Unter Verwendung der Cauchy-Schwarz-Ungleichung
〈u, ϕ〉L2(Ω) ≤ ‖u‖L2(Ω) · ‖ϕ‖L2(Ω) (∗)
erhalten wir
a(u, ϕ) =
ˆΩ
∇u · ∇ϕ
= 〈∇u,∇ϕ〉L2(Ω)
(∗)≤ ‖∇u‖L2(Ω) · ‖∇ϕ‖L2(Ω)
= |u|H1(Ω) · |ϕ|H1(Ω),
und somit die Stetigkeit von a mit der H1-Halbnorm. Darüber hinaus ist nach Definitiongerade
a(u, u) = |u|2H1(Ω),
womit auch die Koerzivität von a mit der H1-Halbnorm folgt. �
Satz 2.4.9Die Linearform b aus (2.30) ist stetig auf H1
0(Ω) mit der Norm | · |H1(Ω).
Beweis.Es ist
b(ϕ) =
ˆΩ
f · ϕ = 〈f, ϕ〉L2(Ω)
und wir erhalten mit der Cauchy-Schwarz-Ungleichung
b(ϕ) ≤ ‖f‖L2(Ω) · ‖ϕ‖L2(Ω),
also für c := ‖f‖L2(Ω)
b(ϕ) ≤ c · ‖ϕ‖L2(Ω),
was uns nach Satz 2.2.5 die Stetigkeit von b liefert. �
Wir haben die ursprüngliche Poisson-Gleichung aus Problem 2.4.1 so weit umformuliertund abgeschwächt, dass wir das Lax-Milgram-Theorem darauf anwenden können, welches unsdie eindeutige Lösbarkeit liefert. Wir haben uns bei der Herleitung dabei immer vergewissert,dass wir das Problem ggf. abschwächen aber nie verstärken, wodurch wir uns zumindestsicher sein können, dass eine Lösung der starken Poisson-Gleichung auch unser schwachesProblem 2.4.6 löst. Jetzt stellt sich aber natürlich die Frage, ob, und wenn ja, unter welchenVoraussetzungen eine Lösung des schwachen Problems auch die starke Poisson-Gleichung,welche wir ursprünglich betrachtet haben, löst. Und an dieser Stelle zahlen wir den Preisfür die Einschränkungen, welche wir im Verlauf dieses Abschnittes gemacht haben.
Satz 2.4.10Es sei Ω ⊂ R
n ein Lipschitz-Gebiet, und ferner sei f ∈ C0(Ω) ∩ L2(Ω). Dann gilt:
1. Falls eine Lösung u ∈ C0(Ω) ∩ C2(Ω) des starken Poisson-Problems (2.20) existiert, soist u ∈ H1
0(Ω) auch eine Lösung des schwachen Poisson-Problems (2.28).
2. Falls für k > 2 + n2 eine Lösung u ∈ Hk
0(Ω) des schwachen Poisson-Problems (2.28)existiert, so ist (nach Abwandlung auf einer Nullmenge) u ∈ C0(Ω) ∩ C2(Ω) auch eineLösung des starken Poisson-Problems (2.20).
Beweis.vgl. [4, Satz 8.13〈2〉] �
18 KAPITEL 2. GRUNDLAGEN AUS DER FUNKTIONAL-ANALYSIS
Nach dem vorherigen Satz wissen wir also, dass eine Lösung u der schwachen Poisson-Gleichung auch die ursprüngliche starke Poisson-Gleichung löst, wenn u „hinreichend regu-lär“ ist, d.h. u ∈ Hk
0(Ω) für ein k > 2 + n2 . Natürlich stellt sich jetzt die Frage, welche
Voraussetzungen erfüllt sein müssen, damit dies gilt. Wir wollen diesen Abschnitt daher miteinem Satz aus der Regularitäts-Theorie abschließen, welcher uns dafür einige hinreichendeVoraussetzungen an Ω und f liefert.
Satz 2.4.11: RegularitätSei Ω ⊂ R
n ein Lipschitz-Gebiet, und es sei k ∈ N0. Es sei f ∈ Hk(Ω) und u ∈ H10(Ω)
bezeichne die Lösung der schwachen Poisson-Gleichung (2.28), dann gilt:
1. u ∈ Hk+1(Ω).
2. Ist Ω konvex, so ist u ∈ Hk+2(Ω).
3. Ist ∂Ω ∈ Ck+2, d.h. lässt sich ∂Ω in jedem Punkt lokal als Graph einer (k + 2)-malstetig-differenzierbaren Funktion darstellen, so ist ebenfalls u ∈ Hk+2(Ω).
Beweis.vgl. [6, Abschnitt 6.3, Theorem 5] �
Kapitel 3
Die Finite-Elemente-Methode
3.1 MotivationWir haben in Abschnitt 2.4 die Poisson-Gleichung mit Hilfe der Sobolev-Räume auf ei-ne zum Lax-Milgram-Theorem kompatible Form gebracht, welches uns garaniert, dass dieschwache Formulierung
ˆΩ
∇u · ∇ϕ =
ˆΩ
f · ϕ ∀ϕ ∈ H10(Ω)
für jedes f ∈ L2(Ω) eine eindeutig bestimmte Lösung u ∈ H10(Ω) besitzt. Es stellt sich
nun die Frage, wie man aus dieser theoretischen Erkenntnis einen implementierbaren Al-gorithmus entwirft, welcher die Lösung u approximativ berechnet. Hierbei bietet sich eineVorgehensweise an, welche in den angewandten Mathematik häufig zu finden ist: Betrachtedas Problem auf einem endlich-dimensionalen Teilraum.In unserem Falle hieße das: Wähle einen endlich-dimensionalen Teilraum Sh ⊂ H1
0(Ω), densog. Ansatz-Raum, und suche eine Lösung uh ∈ Sh des Problems
ˆΩ
∇uh · ∇ϕh =
ˆΩ
f · ϕh ∀ϕh ∈ Sh. (3.1)
Wählen wir nun eine Basis ϕ1, . . . , ϕm von Sh, so führt uns dies aufˆΩ
∇uh · ∇ϕi =
ˆΩ
f · ϕi ∀1 ≤ i ≤ m. (3.2)
Da unsere gesuchte Proximante uh in Sh liegen soll, besitzt sie einen Koeffizienten-Vektorx ∈ R
m, so dass
uh =
m∑j=1
xj · ϕj . (3.3)
Setzen wir diesen Ansatz in (3.2) ein, so erhalten wirˆΩ
∇( m∑
i=j
xj · ϕj
)· ∇ϕi =
ˆΩ
f · ϕi ∀1 ≤ i ≤ m, (3.4)
und unter mehrfacher Ausnutzung der Linearität letztendlich
m∑j=1
xj ·ˆΩ
∇ϕj · ∇ϕi =
ˆΩ
f · ϕi ∀1 ≤ i ≤ m. (3.5)
Betrachten wir (3.5) nun genauer, so stellen wir fest, dass dies sich nun als lineares Glei-chungssystem
Ax = b
19

20 KAPITEL 3. DIE FINITE-ELEMENTE-METHODE
schreiben lässt, wobei die Matrix A ∈ Rm×m und der Vektor b ∈ R
m durch
aij :=
ˆΩ
∇ϕj · ∇ϕi, (3.6)
bi :=
ˆΩ
f · ϕi. (3.7)
gegeben sind. Nun haben wir das diskrete Problem (3.1) so weit umformuliert, dass wir esalgorithmisch bearbeiten können, denn das Lösen von linearen Gleichungssystemen ist in derNumerik seit je her eine der Hauptaufgaben. Es stellt sich jetzt sowohl aus theoretischer alsauch aus praktischer Sicht die Frage, wie der Ansatz-Raum Sh und seine Basis ϕ1, . . . , ϕm zuwählen sind. Wir wollen uns zunächst einmal ein paar praktische Aspekte vor Augen führen.
Betrachten wir die Matrix-Einträge aus (3.6), so stellen wir fest, dass wir numerisch integrie-ren müssen – und zwar über ein beliebiges Gebiet Ω. Im Gegensatz zum ein-dimensionalenFall ist dies auf einem Gebiet Ω ⊂ R
n im Allgemeinen schwierig, womit uns keine andereWahl bleibt, als Ω in „einfach“ zu integrierende Teilgebiete, wie z.B. Dreiecke oder Hexaeder,zu zerlegen und auf diesen die Integration mit Hilfe von Quadratur-Formeln durchzuführen.
Desweiteren sehen wir in (3.6), dass wir in der Lage sein müssen, die Basisfunktionen zudifferenzieren. Es ist hierbei wünschenswert, wir könnten zumindest die Differentation exaktdurchführen, und hierfür bieten sich insbesondere Polynome an.
Die Numerik unterscheidet (strukturell) zwischen zwei Typen von Matrizen, nämlich dievoll besetzten Matrizen, bei denen (fast) alle Einträge aij �= 0 sind, und die sogenanntendünn besetzten Matrizen, deren Großteil aller Einträge, d.h. alle bis auf O(m) viele, gleichNull sind. Wenn wir also für (3.6) eine dünn besetzte Matrix erhalten wollen, wäre es ge-schickt, die Basisfunktionen ϕi so zu konstruieren, dass sie nur einen sehr lokalen Trägerbesitzen, denn dies hieße, dass es für ein ϕi nur wenige Partner ϕj gibt, so dass aij �= 0 seinkann.
Fassen wir unsere bisherigen praktisch veranlassten Überlegungen zusammen, so brauchenwir ein Gitter, auf welchem wir (stückweise) polynomielle Basisfunktionen mit sehr loka-len Trägern konstruieren möchten. Schränken wir uns mit diesen Wünschen auf den ein-dimensionalen Fall ein, so fallen uns (hoffentlich) sofort die „Hütchenfunktionen“ ein, welcheden Splines zugrunde liegen (vgl. z.B. [12, Abschnitt 2.3]).
Bevor wir uns allerdings auf den Weg machen, n-dimensionale Splines zu konstruieren, wol-len wir uns auch noch Gedanken über die Theorie machen. Wir haben uns für die Herleitungder Gleichung (3.1) auf einen (endlich-dimensionalen) Teilraum Sh ⊂ H1
0(Ω) eingeschränkt,wissen jedoch noch nicht, wie viel unsere diskrete Lösung uh ∈ Sh mit der exakten (schwa-chen) Lösung u ∈ H1
0(Ω) zu tun hat. Insbesondere wissen wir noch nicht, ob das von unsaus praktischen Aspekten hergeleitete Verfahren in der Lage ist, eine Folge von diskretenLösungen (uh) zu berechnen, welche in einer passenden Norm gegen die exakte Lösung ukonvergiert. Diese Frage lässt sich mit dem berühmten Céa-Lemma (vgl. z.B. [3, Satz II.4.2])positiv beantworten.
Satz 3.1.1: Céa-LemmaEs sei H ein Hilbert-Raum und Sh ⊆ H ein Teilraum, und es sei a : H×H → R eine stetigeund koerzive Bilinearform. Ferner sei b : H → R linear und stetig, sowie u ∈ H und uh ∈ Shdie nach Theorem 2.1.3 eindeutig bestimmten Lösungen der Gleichungen
a(u , ϕ ) = b(ϕ ) ∀ϕ ∈ H, (3.8)a(uh, ϕh) = b(ϕh) ∀ϕh ∈ Sh. (3.9)
Es gibt ein 0 < c = c(a,H) �= c(Sh, b, u, uh), so dass
‖u− uh‖H ≤ c · infvh∈Sh
‖u− vh‖H . (3.10)

3.1. MOTIVATION 21
Die rechte Seite von (3.10) wird dabei als Diskretisierungs-Fehler bezeichnet.
Bevor wir das Céa-Lemma beweisen, wollen wir uns zunächst überlegen, welche Auswirkun-gen dieses auf das von uns konstruierte Verfahren hat. Die Abschätzung in (3.10) besagt,dass der Fehler, welchen unsere diskrete Lösung uh ∈ Sh in einer Norm ‖ ·‖H auf H erzeugt,im Wesentlichen davon abhängt, wie gut wir die exakte Lösung u ∈ H1
0(Ω) in dieser Normdurch ein vh ∈ Sh approximieren können. Wollen wir also die Lösung u einer Differential-gleichung mit Hilfe des Ansatzes in (3.1) approximieren, so sollten wir dazu eine Folge vonRäumen (Sh) wählen, welche in der Lage ist, eine beliebige H1
0(Ω)-Funktion beliebig genauzu approximieren, d.h. es soll Sh h→0−−−→ H1
0(Ω) gelten. Auch in dieser Hinsicht sind die Splinesim ein-dimensionalen gute Kandidaten, denn hier gilt für die Approximation eines u ∈ Ck+1
durch einen Spline uh vom Grad k gerade
‖u− uh‖∞ ≤ c · hk+1 · ‖u(k+1)‖∞.
Zwar stimmt hierbei weder der Raum Ck+1 noch die darauf definierte Normen ‖ · ‖∞ mitdenen überein, welche wir hier benötigen, aber wir werden später in Kapitel 5 sehen, dasswir genau so eine Abschätzung auch für den H1
0(Ω) mit den Sobolev-(Halb-)Normen nach-weisen können.
Da wir nun sowohl aus praktischer Sicht als auch im Hinblick auf die Fehler-Abschätzungdarüber im Klaren sind, dass Splines eine gute Wahl für den Ansatz-Raum Sh sind, könnenwir diesen Abschnitt mit dem Beweis des Céa-Lemmas abschließen.
Beweis von Satz 3.1.1.O.B.d.A. sei u �= uh, sonst ist (3.10) klar.Da Sh ⊆ H , folgt aus (3.8) unmittelbar
a(u, ϕh) = b(ϕh) ∀ϕh ∈ Shund durch Subtraktion von (3.9) erhalten wir
a(u− uh, ϕh) = 0 ∀ϕh ∈ Sh. (3.11)
Sei nun vh ∈ Sh beliebig, dann gilt
a(u− uh, u− uh) = a(u− uh, u− vh + vh − uh)= a(u− uh, u− vh) + a(u− uh, vh − uh).
Nun ist vh− uh ∈ Sh und wegen (3.11) fällt der zweite Summand auf der rechten Seite weg,und wir erhalten somit
a(u− uh, u− uh) = a(u− uh, u− vh). (3.12)
Da a stetig ist, gibt es nach Definition 2.1.1 ein c0 > 0, so dass
a(u − uh, u− vh) ≤ c0‖u− uh‖‖u− vh‖. (3.13)
Aufgrund der Koerzivität von a existiert nach Definition 2.1.2 eine zweite Konstante c1 >0, so dass
a(u− uh, u− uh) ≥ c1‖u− uh‖2, (3.14)
und wir erhalten nun
c1‖u− uh‖2(3.14)≤ a(u− uh, u− uh)
(3.12)= a(u− uh, u− vh)
(3.13)≤ c0‖u− uh‖‖u− vh‖.
Nun kürzen wir durch c1‖u − uh‖ und, da vh ∈ Sh beliebig war, erhalten mit c := c0c1
dieBehauptung. �

22 KAPITEL 3. DIE FINITE-ELEMENTE-METHODE
Bemerkung: Die Gleichung (3.11) wird (bei symmetrischen Bilinearformen) oft als Galerkin-Orthogonalität bezeichnet und ist, wie wir gesehen haben, von fundamentaler Wichtigkeitfür die Aussage des Lemmas.
3.2 Das Gitter
Wir sind durch unsere Überlegungen im vorherigen Abschnitt zu dem Schluß gekommen, dasswir das Gebiet Ω in kleinere Teile, welche wir als Zellen bezeichnen wollen, zerlegen müssen– wir brauchen also ein Gitter. Wir haben uns darüber hinaus überlegt, dass wir insbesondereZellen brauchen, auf denen wir „einfach“ mittels Quadraturformeln integrieren können. Dafürbieten sich vor allem zwei Typen von Zellen an: die Simplizes und die Hyperwürfel.Bevor wir jedoch zur Definition des eigentlichen Gitters kommen, möchten wir zuerst einigeMindestanforderungen an dieses in der folgenden Definition zusammenfassen.
Definition 3.2.1: endliche Lipschitz-PartitionierungSei Ω ⊂ R
n ein Lipschitz-Gebiet. Ein Th ⊂ ℘(Ω) ist eine endliche Lipschitz-Partitionie-rung von Ω, falls die folgenden Bedingunen erfüllt sind:
1. card(Th) <∞
2. ∀ T ∈ Th : T ist ein Lipschitz-Gebiet
3. Ω =⋃
T∈ThT
4. ∀ T1, T2 ∈ Th, T1 �= T2 : T1 ∩ T2 = ∅
Die ersten beiden Forderungen sind selbsterklärend: Th soll aus endlich vielen Teil-Lipschitz-Gebieten T ⊆ Ω bestehen – insbesondere ist damit nach Definition 2.2.3 jedes T ∈ Thoffen, beschränkt und nicht leer. Die Bedingungen 3. und 4. machen gerade eine Partitio-nierung aus: die Teilgebiete sollen paarweise disjunkt sein und die Vereinigung aller T ∈ Thsoll (modulo Nullmenge) wieder ganz Ω sein.
Wir können nun relativ einfach definieren, was unter einem Gitter zu verstehen ist: jedesT ∈ Th soll ein bestimmtes geometrisches Objekt sein. Darüber hinaus möchten wir auchnoch weitere geometrische Entitäten, wie Knoten oder Seitenflächen einer Zelle T , definierenkönnen. Wir wollen zuerst den einfacheren Fall der Simplex-Gitter betrachten und benöti-gen dazu zunächst eine Definition, welche besagt, was unter einem n-Simplex bzw. seinenKnoten und Seitenflächen zu verstehen ist.
Definition 3.2.2: n-SimplexSei n ∈ N und T ∈ R
n offen, beschränkt und nicht leer. Wir sagen, T ist ein n-Simplex,falls v0, . . . , vn ∈ R
n existieren, so dass T = conv∗{v0, . . . , vn}.In diesem Falle bezeichnen wir die Menge der Knoten (Eckpunkte) von T mit
V(T ) :={v0, . . . , vn
}⊂ R
n,
und für k ∈ {1, . . . , n− 1} die Menge der k-dimensionalen Seitenflächen von T mit
E(k)(T ) :={
conv∗(V )∣∣ V ⊂ V(T ) : card(V ) = k + 1
}⊂ ℘(Rn).
In der vorangegangen Charakterisierung haben wir neben dem n-Simplex, welcher als innerekonvexe Hülle von n + 1 Knoten definiert ist, auch die den Simplex aufspannende Knoten-menge V(T ) und die Seitenflächen E(k) definiert. Dies erlaubt es uns nun zu definieren, wasunter einem Gitter zu verstehen ist und welche zusätzlichen Informationen – nämlich dieKnoten und Seitenflächen – dieses enthalten soll.

3.2. DAS GITTER 23
Definition 3.2.3: Simplex-GitterSei Ω ⊂ R
n ein Lipschitz-Gebiet. Eine endliche Lipschitz-Partitionierung Th von Ω ist einSimplex-Gitter auf Ω, falls jede Zelle T ∈ Th ein n-Simplex ist. Wir bezeichnen hierbeidie Menge aller Knoten von Th mit
Vh :=⋃
T∈Th
V(T ),
sowie für jedes k ∈ {1, . . . , n− 1} die Menge aller k-dimensionalen Seitenflächen von Th mit
E(k)h :=⋃
T∈Th
E(k)(T ).
Wir wollen im Rahmen dieser Arbeit im Hinblick auf Kapitel 4 jedoch keine Simplex-Gitter verwenden, sondern widmen uns dem anspruchsvolleren Fall: Wir wollen für n = 2ein Vierecks-Gitter benutzen, wobei wir uns nicht auf Parallelogramme oder sogar Rechteckebeschränken wollen. Zwar ist auch hier die Definition eines Vierecks-Gitters relativ einfach,jedoch stellt sich unweigerlich die Frage, was unter der „n-dimensionalen Version“ einesVierecks zu verstehen ist – zumindest wenn man sich nicht auf Parallelepipede oder Quaderbeschränken möchte. Wir wollen, um diese Frage zu beantworten, an dieser Stelle nocheinmal die Simplizes betrachen und einen Satz zur Transformation von Simplizes anführen,welchen wir hier allerdings nicht beweisen wollen, damit wir unser Ziel nicht aus den Augenverlieren.
Satz 3.2.4: Simplex-TransformationSei n ∈ N und es sei T := conv∗
{0, e1, . . . , en
}⊂ R
n der n-Simplex, der durch die innerekonvexe Hülle des Koordinaten-Ursprungs und der kartesischen Einheits-Vektoren gegebenist, dann gilt:
1. Sei T ⊂ Rn ein n-Simplex mit V(T ) = {v0, . . . , vn}, dann ist die Matrix A ∈ R
n×n,deren Spalten durch
A·j := vj − v0 (3.15)
gegeben sind, regulär und unter der affinen Abbildung
FT (x) := Ax+ v0 (3.16)
gilt FT (T ) = T .
2. Sei A ∈ Rn×n regulär und b ∈ R
n, dann ist unter der affinen Abbildung
FT (x) := Ax+ b (3.17)
T := FT (T ) ein n-Simplex mit V(T ) = {b, v1, . . . , vn}, wobei die Knoten vj durch
vj := A.j + b (3.18)
gegeben sind.
Der vorangegangene Satz besagt, dass jeder n-Simplex als Bild eines „Referenz-Simplexes“ Tunter einer bijektiven affinen Transformation FT charakterisiert werden kann1. Diese Cha-rakterisierung ist hinreichend abstrakt, dass wir uns nun überlegen können, wie wir nachdiesem Schema eine „Verallgemeinerung“ des Hyperwürfels charakterisieren können. Betrach-ten wir die Matrix A aus (3.15) und die Abbildung FT in (3.16) noch einmal genauer, sostellen wir fest, dass diese gerade so konstruiert ist, dass FT die Eckpunkte von T auf die
1Dies ergibt jedoch keinen Isomorphismus zwischen n-Simplizes und bijektiven affinen Abbildungen: füreinen n-Simplex können durch Umnummerierung der Knoten vj nach (3.15) verschiedene bijektive affineAbbildungen FT konstruiert werden.

24 KAPITEL 3. DIE FINITE-ELEMENTE-METHODE
Eckpunkte von T abbildet. Versuchen wir, diesen Ansatz auf Hyperwürfel zu übertragen, sostellen wir zunächst fest, dass wir die Transformation FT in einem Raum suchen müssen, des-sen Dimension gerade 2n entspricht – denn genau so viele Eckpunkte hat ein n-dimensionalerHyperwürfel, welchen wir für T benutzen möchten. Es stellt sich heraus, dass der Raum dermulti-linearen Polynome Qn
1 genau dies erfüllt, und diesen wollen wir für unsere Charakteri-sierung des „verallgemeinerten Hyperwürfels“ benutzen, welchen wir nun Qn
1 -Würfel taufenwollen.
Definition 3.2.5: Qn1 -Würfel
Sei n ∈ N und es sei T := (−1, 1)n der offene Einheits-Hyperwürfel. Ein Lipschitz-GebietT ⊂ R
n heißt Qn1 -Würfel, falls ein bijektives Vektor-Feld FT ∈ Qn
1 existiert, so dass T =
FT (T ).In diesem Falle bezeichnen wir mit V(T ) die Menge der Bilder aller Eckpunkte von T unterder Abbildung FT , sowie für jedes k ∈ {1, . . . , n− 1} mit E(k)(T ) die Menge der Bilder allerk-dimensionalen Seitenflächen von T unter FT .
Wir haben nun eine abstrakte Charakterisierung der Zellen T geschaffen, aus welchen sichunser Gitter zusammensetzen soll. Darüber hinaus können wir dank der Definition von V undE(k) sogar sagen, was wir unter einem Eckpunkt oder einer Seitenfläche eines Qn
1 -Würfelsverstehen wollen.
Bevor wir jedoch das Qn1 -Gitter definieren, wollen uns den Fall n = 2 genauer anschau-
en. Wir haben in unseren anfänglichen Überlegungen gefordert, dass unser Gitter Th eineZerlegung von Ω in Vierecke sein soll, wobei wir uns nicht auf Parallelogramme einschränkenwollten. Es stellt sich nun die Frage, ob ein Q2
1-Gitter diese Anforderungen erfüllt – insbe-sondere ist noch unklar, ob ein Q2
1-Würfel überhaupt ein Viereck ist. Diese Fragen möchtenwir mit dem folgenden Satz positiv beantworten.
Satz 3.2.6Ein T ⊂ R
2 ein konvexes Viereck, dann ist T ein Q21-Würfel.
Beweis.Diese Aussage folgt aus Satz 5.3.9, welchen wir in Kapitel 5 sehen werden. �
Achtung: Es sei an dieser Stelle angemerkt, dass für n ≥ 3 ein Qn1 -Würfel im Allgemeinen
nicht konvex ist, da die Seiten-Flächen E(k) für k ≥ 2 „gewölbt“ sein können, d.h. eine Sei-tenfläche liegt nicht notwendigerweise in einer k-dimensionalen Hyperebene!
Wir können nun in Analogie zum Simplex-Gitter das Qn1 -Gitter definieren.
Definition 3.2.7: Qn1 -Gitter
Sei Ω ⊂ Rn ein Lipschitz-Gebiet. Eine endliche Lipschitz-Partitionierung Th von Ω ist ein
Qn1 -Gitter auf Ω, falls jedes T ∈ Th ein Qn
1 -Würfel ist. Wir bezeichnen hierbei die Mengealler Knoten (Eckpunkte) von Th mit
Vh :=⋃
T∈Th
V(T ),
sowie für jedes k ∈ {1, . . . , n− 1} die Menge aller k-dimensionalen Seitenflächen von Th mit
E(k)h :=⋃
T∈Th
E(k)(T ).
Es gibt einen wichtigen Spezialfall von Qn1 -Gittern, welchen wir noch betrachten möchten.
Es gilt Pn1 ⊆ Qn
1 und wir wollen der Klasse an Gittern, für die jede Zelle T ∈ Th durch das

3.2. DAS GITTER 25
Bild einer bijektiven affinen Transformation FT : T → T aufgespannt wird, einen Namengeben, da sie später für uns von großem Interesse sein wird.
Definition 3.2.8: affine ÄquivalenzEin Qn
1 -Gitter Th heißt affin äquivalent, falls für jedes T ∈ Th ein bijektives Vektor-FeldFT ∈ Pn
1 existiert, so dass T = FT (T ).
Im Falle eines affin äquivalenten Qn1 -Gitters können wir nun auch sagen, um welche geome-
trischen Objekte es sich bei den Zellen T ∈ Th handelt: es sind eben die Parallelepipede.
Man könnte glauben, wir hätten jetzt ein Gitter mit allen wichtigen Eigenschaften definiert,jedoch gibt es noch eine wichtige Voraussetzung, welche wir an ein Gitter stellen wollen: dieKonformität.
Definition 3.2.9: KonformitätSei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei Th ein Simplex- oder Qn1 -Gitter auf Ω. Wir sagen
Th ist konform, falls für jedes Paar T1, T2 ∈ Th mit T1 �= T2 für den Schnitt der AbschlüsseX := T 1 ∩ T 2 genau eine der folgenden Bedingungen gilt:
1. X = ∅
2. ∃ v ∈ V(T1) ∩ V(T2), so dass X = {v}
3. ∃ E ∈ E(k)(T1) ∩ E(k)(T2) für ein k ∈ {1, . . . , n− 1}, so dass X = E
Ein Gitter ist also konform, wenn zwei benachbarte Zellen T1, T2 entweder einen gemeinsa-men Knoten besitzen oder sich eine ganze gemeinsame Kante bzw. – ab dem drei-dimen-sionalen Fall – Seitenfläche teilen, dies entspricht, einfach gesagt, genau dem, was man sichintuitiv unter einem Gitter vorstellen würde.
Wir wollen, da sich nicht-konforme Gitter nur bedingt für die Verwendung mit der Finite-Elemente-Methode eignen, in dieser Arbeit stillschweigend voraussetzen, dass jedes GitterTh, welches wir betrachten, konform ist.
Abbildung 3.1: Ein konformes (links) und ein nicht-konformes Gitter (rechts).
Wir wollen zum Abschluß dieses Abschnittes definieren, was wir unter einer Gitter-Folge(Th) verstehen wollen. Eine Gitter-Folge soll, wie der Name schon sagt, eine Folge von Git-tern auf einem Gebiet Ω sein, wobei wir anschaulich gesprochen fordern wollen, dass dieGitter in der Folge immer „feiner“ werden. Um dies formal definieren zu können, müssen wiruns zuerst überlegen, wie wir die „Feinheit“ eines Gitters messen wollen.
Definition 3.2.10: GitterweiteSei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei Th ein Simplex- oder Qn1 -Gitter auf Ω. Wir
bezeichnen die Gitterweite von Th mit
diam(Th) := maxT∈Th
diam(T ). (3.19)

26 KAPITEL 3. DIE FINITE-ELEMENTE-METHODE
Nun ist die Definition einer Gitter-Folge einfach: Wir möchten eine abzählbare Menge vonGittern auf einem Gebiet Ω, deren Gitterweiten gegen Null konvergieren.
Definition 3.2.11: Gitter-FolgeSei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei (Th)η∈N eine abzählbare Menge von Simplex-oder Qn
1 -Gittern auf Ω. Wir sagen, (Th)η∈N ist eine Gitter-Folge auf Ω, falls die Folge derGitterweiten eine (streng monotone) Null-Folge ist, d.h.
diam((Th)η
) η→∞−−−−→ 0.
Wir schreiben in diesem Falle historisch bedingt (Th) anstatt (Th)η∈N und benutzen dieGitterweite h := diam(Th) −→ 0 als „Laufvariable“.
3.3 Konstruktion von Ansatz-RäumenMit der Charakterisierung eines Gitters Th aus dem vorangegangenen Abschnitt stehen wirnun vor der Aufgabe, einen geeigneten Ansatz-Raum Sh auf Th zu konstruieren. Wir habenuns aufgrund der Überlegungen aus Abschnitt 3.1 dazu entschieden, einen „stückweisepolynomiellen“ Raum für Sh zu verwenden, d.h. für ein fest vorgegebenes k ∈ N0 soll
∀ T ∈ Th : Pnk ⊆ Sh|T (3.20)
gelten. Diese Eigenschaft trägt, wie wir später in Kapitel 5 sehen werden, neben der Git-terweite h maßgeblich zur Approximationsgüte des Raumes Sh bei. Darüber hinaus mussSh aber auch weitere Anforderungen erfüllen, damit er zur Lösung partieller Differentialglei-chungen geeignet ist: Das Céa-Lemma fordert die Teilraum-Beziehung Sh ⊂ H1
0(Ω) und wirwollen zu diesem Punkt einen Satz formulieren.
Satz 3.3.1Es sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei Th ein Gitter auf Ω. Ferner sei Sh ⊂ L2(Ω),so dass Sh|T ⊂ C0(T ) ∩H1(T ) für alle T ∈ Th erfüllt ist, dann gilt:
Sh ⊂ H1(Ω) ⇐⇒ Sh ⊂ C0(Ω).
Beweis.vgl. [2, Theorem 2.1.1, Theorem 4.2.1] �
Fassen wir den vorangegangen Satz mit der Forderung (3.20) zusammen, so sind wir bereitsjetzt in der Lage, eine ganze Klasse von möglichen Ansatz-Räumen Sh auf abstraktem Wegezu definieren. Wir wollen im folgenden Beispiel eine Definition der Standard-Ansatz-Räumefür Simplex-Gitter angeben.
Beispiel 3.3.2Sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei Th ein Simplex-Gitter auf Ω. Für k ∈ N setzenwir
Pk(Th) :={ϕ ∈ C0(Ω)
∣∣∣ ∀ T ∈ Th : ϕ|T ∈ Pnk
}⊂ H1(Ω). (3.21)
Wir wollen uns mit dem Fall k = 1 von (3.21) näher beschäftigen, denn dieser Raum –und insbesondere die Konstruktion seiner Basis – ist prototypisch für allgemeinere Ansatz-Räume Sh. Eine affine Funktion ϕ ∈ Pn
1 ist durch ihre Funktionswerte in den Knoten einesn-Simplexes T ∈ Th eindeutig bestimmt und insbesondere ist auch die Einschränkung von ϕauf eine k-dimensionale Seitenfläche E ∈ E(k)(T ), welche selbst ein k-Simplex ist, wiederumdurch die Funktionswerte in den Knoten von E eindeutig bestimmt (vgl. z.B. [2, Abschnitt2.2]). Haben wir also eine Funktion ϕ : Ω→ R gegeben, welche
∀ T ∈ Th : ϕ|T ∈ Pn1

3.3. KONSTRUKTION VON ANSATZ-RÄUMEN 27
erfüllt, so genügt es aufgrund dieser Überlegungen zu fordern, dass ϕ in jedem Knoten v ∈ Vhstetig ist, um ϕ ∈ C0(Ω) zu erhalten1. Wir können also eine alternative Charakterisierungfür den P1(Th) angeben:
P1(Th) :={ϕ : Ω→ R
∣∣∣ ∀ T ∈ Th : ϕ|T ∈ Pn1 ,
∀ v ∈ Vh : ϕ stetig in v}. (3.22)
Als nächsten Schritt wollen wir eine Basis des Raumes P1(Th) konstruieren. Wir haben inAbschnitt 3.1 im Hinblick auf die Besetzungs-Struktur der Matrix aus (3.6) den Wunschgeäußert, dass jede Basisfunktion eines Ansatz-Raumes Sh einen möglichst „lokalen Träger“besitzen soll, d.h. sie soll auf fast jeder Zelle T ∈ Th konstant Null sein. Im Beispiel des P1(Th)führt dies direkt zu der Forderung, dass jede Basisfunktion in fast jedem Knoten v ∈ Vhverschwinden soll – optimalerweise also in jedem bis auf genau einen. Mit diesem Ansatzordnen wir also jedem Knoten vj ∈ Vh = {v1, . . . , vm} des Gitters genau eine Basisfunktionϕj ∈ P1(Th) zu, so dass insgesamt die Beziehung
∀ i, j ∈ {1, . . . ,m} : ϕj(vi) = δji (3.23)
erfüllt ist. Wir wollen diese Basis nun näher untersuchen und definieren dazu für jedes T ∈ Thmit
I(T ) :={i ∈ {1, . . . ,m}
∣∣ vi ∈ V(T ) }, (3.24)
die Index-Menge der zu T adjazenten Knoten. Nach (3.23) gilt also
∀ T ∈ Th, ∀ i, j ∈ I(T ) : ϕj |T (vi) = δji . (3.25)
Auf der anderen Seite ist jede Basisfunktion ϕj nach (3.23) auf jeder Zelle T ∈ Th, für diej /∈ I(T ) gilt, konstant Null, da ϕj in jedem Knoten von T verschwindet. Diese Erkennt-nis, so simpel sie auch erscheinen mag, ist für unser weiteres Vorgehen von fundamentalerBedeutung, denn sie erlaubt es uns, die Konstruktion einer globalen Basisfunktion ϕj vonP1(Th) nach (3.23) auf die Konstruktion lokaler Funktionen ϕj |T von Pn
1 auf jeder ZelleT ∈ Th nach (3.25) zurückzuführen. Da, wie bereits erwähnt, eine affine Funktion ϕj |T ∈ Pn
1
eindeutig durch die Funktionswerte in den Knoten eines Simplexes bestimmt ist, können wirfür jedes T ∈ Th die Einschränkung ϕj |T einer Basisfunktion ϕj mit j ∈ I(T ) nach (3.25)berechnen.
Wir wollen an dieser Stelle versuchen, unsere bisherigen Überlegungen für den P1(Th) aufallgemeinere Ansatz-Räume Sh zu übertragen. Die erste charakteristische Eigenschaft einesAnsatz-Raumes Sh ist, dass die Einschränkung von Sh auf eine einzelne Zelle T ∈ Th einenbestimmten vorgegebenen Raum aufspannen soll. Daher wollen wir die Einschränkung einesallgemeineren Ansatz-Raumes Sh auf eine einzelne Zelle T ∈ Th
ST :={ϕ|T
∣∣ ϕ ∈ Sh }(3.26)
als lokalen Spann von Sh auf T bezeichnen, wobei ST für jede Zelle T des Gitters Thvorgegeben ist. Im Beispiel der Pk(Th)-Räume aus (3.21) haben wir gerade
∀ T ∈ Th : ST = Pnk
gewählt, jedoch werden wir später sehen, dass dies für allgemeinere Ansatz-Räume „zu strikt“ist, und fordern deshalb lediglich, dass für ein vorgegebenes k ∈ N0 die Bedingung
∀ T ∈ Th : Pnk ⊆ ST (3.27)
erfüllt ist – in diesem Falle sagen wir, Sh ist vom Grad k. Dies wird, wie bereits am Anfangdieses Abschnittes erwähnt, für die spätere Fehler-Analyse von maßgeblicher Bedeutung sein.
1Die Stetigkeit in den Knoten ist im Fall k ≥ 2 für die globale Stetigkeit jedoch nicht mehr hinreichend,beispielsweise müsste für k = 2 noch zusätzlich die Stetigkeit in den Kantenmitten gefordert werden.

28 KAPITEL 3. DIE FINITE-ELEMENTE-METHODE
Die zweite charakteristische Eigenschaft eines Ansatz-Raumes Sh ist die Vorgabe einerMenge von Knotenfunktionalen, welche oft auch einfach als „Unbekannte“ oder „Frei-heitsgrade“ bezeichnet werden, mit deren Hilfe die Konstruktion einer Basis ϕ1, . . . , ϕm vonSh auf die Berechnung ihrer Einschränkungen ϕj |T auf jeder Zelle T ∈ Th zurückgeführtwerden kann. Bedauerlicherweise stellt die formal präzise Definition eines Knotenfunktio-nals eine didaktische Herausforderung dar, welche im Rahmen dieser Arbeit ihres Gleichensucht, weshalb wir uns anschaulich am Beispiel des P1(Th) orientieren wollen. Wir habendie Basisfunktionen des P1(Th) über die Beziehung (3.23) charakterisiert und diese auf dieKonstruktion aus (3.25) zurückgeführt. Diese Vorgehensweise wollen wir nun auch für allge-meinere Ansatz-Räume Sh verwenden, wobei wir für eine Menge von Knotenfunktionalen
N1, . . . ,Nm : Sh → R, linear und stetig (3.28)
die Forderung (3.23) an die zu berechnenden Basisfunktionen ϕ1, . . . , ϕm von Sh in
∀ i, j ∈ {1, . . . ,m} : Ni(ϕj) = δji (3.29)
übersetzen. Im Beispiel des P1(Th) haben wir jedem Knoten vi ∈ Vh das Knotenfunktional
Ni(ϕ) := ϕ(vi)
zugeordnet – hier findet sich auch der Ursprung des Begriffs „Knotenfunktional“.In der Fachliteratur (vgl. z.B. [1, Abschnitt 2.1]) findet sich häufig die Charakterisierung,dass die Anwendung eines Knotenfunktionals auf eine Funktion ϕ ∈ Sh gerade der Aus-wertung von ϕ – oder einer ihrer partiellen Ableitungen – in einem gewissen Punkt x ∈ Ω
entspricht, wobei x beispielsweise ein Knoten v ∈ Vh, der Mittelpunkt einer Kante E ∈ E(1)h
oder der Schwerpunkt einer Zelle T ∈ Th sein kann. Bedauerlicherweise ist diese Charakteri-sierung eines Knotenfunktionals für uns unzureichend – oder viel mehr zu speziell – da wirim Hinblick auf Kapitel 4 eine allgemeinere Definition benötigen. Wir wollen aus diesemGrunde den Begriff des Knotenfunktionals etwas dehnen, und wollen zulassen, dass ein Kno-tenfunktional N nicht nur von der Einschränkung einer Funktion ϕ ∈ Sh auf einen einzelnenPunkt x ∈ Ω sondern auf eine ganze geometrische Entität des Gitters, also beispielsweise eineSeitenfläche E ∈ E(k)h oder eine Zelle T ∈ Th, abhängen darf. Mit (3.28) bedeutet dies, dassein Knotenfunktional NE , welches beispielsweise von einer Seitenfläche E ∈ E(k)h abhängt,formal gesehen im Dualraum der Einschränkung Sh|E liegt1, d.h. es ist
NE : Sh|E → R, linear und stetig, (3.30)
wobei wir für ein ϕ ∈ Sh die Anwendung von NE auf ϕ über
NE(ϕ) := NE(ϕ|E) (3.31)
definieren. Analog dazu wird ein Knotenfunktional, welches einem Knoten v ∈ Vh oder einerZelle T ∈ Th zugeordnet ist, über
Nv : Sh|v → R, linear und stetig,NT : Sh|T → R, linear und stetig,
definiert. Wir wollen an dieser Stelle noch die Index-Menge I(T ), welche wir in (3.24) fürden P1(Th) definiert haben, für allgemeine Knotenfunktionale formulieren. Ist also für einenAnsatz-Raum Sh eine Menge von Knotenfunktionalen N1, . . . ,Nm gegeben, so definierenwir für jedes T ∈ Th die Index-Menge der zu T adjazenten Knotenfunktionale
I(T ) ⊆ {1, . . . ,m},
wobei wir für ein T ∈ Th die folgende Unterscheidung treffen:1Dies schließt präzise genommen wiederum aus, dass ein Knotenfunktional N von einer Ableitung von
ϕ abhängen darf, aber wir wollen diese Einschränkung hinnehmen.
3.3. KONSTRUKTION VON ANSATZ-RÄUMEN 29
1. Ist das Knotenfunktional Ni einem Knoten v ∈ Vh zugeordnet, so ist i ∈ I(T ) genaudann wenn v ∈ V(T ).
2. Ist das Knotenfunktional Ni für ein k ∈ {1, . . . , n − 1} einer Seitenfläche E ∈ E(k)h
zugeordnet, so ist i ∈ I(T ) genau dann wenn E ∈ E(k)(T ).
3. Ist das Knotenfunktional Ni einer Zelle T ′ ∈ Th zugeordnet, so ist i ∈ I(T ) genaudann wenn T ′ = T .
Wir wollen von nun an nicht mehr unterscheiden, welcher geometrischen Entität ein Kno-tenfunktional zugeordnet ist, denn es ist für uns im Folgenden lediglich von Interesse, fürjede Zelle T ∈ Th angeben zu können, welche Knotenfunktionale Ni wir für die Konstruktionder Basisfunktionen ϕj |T auf T betrachten müssen.Wir können jetzt, wie im Beispiel des P1(Th), die Konstruktion der globalen Basis ϕ1, . . . , ϕm
von Sh nach (3.29) auf die Konstruktion
∀ T ∈ Th, ∀ i, j ∈ I(T ) : Ni(ϕj |T ) = δji (3.32)
zurückführen. Spätestens an dieser Stelle wird klar, dass die Knotenfunktionale und derlokale Spann nicht unabhängig voneinander gewählt werden können – sie müssen sorgfältigaufeinander abgestimmt sein, damit die eindeutige Lösbarkeit der Gleichungen in (3.32)gewährleistet ist. Für jede Zelle T ∈ Th ist für ein ϕ ∈ Sh nach Definition gerade ϕ|T ∈ ST ,somit ist die Forderung
∀ T ∈ Th : dim(ST ) = card(I(T ))
für die eindeutige Lösbarkeit von (3.32) notwendig. Im Beispiel des P1(Th) gilt ST = Pn1 –
somit also dim(ST ) = n+1 – und card(I(T )) entsprach der Anzahl der Knoten von T – alsoebenfalls n+1. Allerdings ist diese Forderung für die Lösbarkeit von (3.32) immer noch nichthinreichend – beim P1(Th) spielte die Tatsache, dass eine affine Funktion durch die Wertein den Knoten eines n-Simplexes eindeutig bestimmt ist, eine wichtige Rolle. Wir wollenaus diesem Grunde eine wichtige Definition angeben, welche uns hinreichende Bedingungenliefern wird, mit denen wir nachweisen können, dass auf jeder Zelle T ∈ Th eine Funktionϕ ∈ ST durch ihre Auswertung der Knotenfunktionale eindeutig bestimmt ist.
Definition 3.3.3: UnisolvenzSei Th ein Gitter und Sh ein Ansatz-Raum auf Th, welcher durch eine Menge von Knoten-funktionalen N1, . . . ,Nm und auf jeder Zelle T ∈ Th durch einen lokalen Spann ST gegebenist. Der Ansatz-Raum Sh heißt unisolvent, falls auf jeder Zelle T ∈ Th die folgenden Be-dingungen erfüllt sind:
1. dim(ST ) = card(I(T ))
2. Für ϕ ∈ ST folgt aus∀ i ∈ I(T ) : Ni(ϕ) = 0
direkt ϕ = 0.
Unter der Voraussetzung, dass Sh ein unisolventer Ansatz-Raum ist, können wir nun mitdem folgenden Satz nachweisen, dass für jedes T ∈ Th eine eindeutig bestimmte Basis vonST existiert, welche (3.32) erfüllt.
Satz 3.3.4Sei Th ein Gitter und Sh ein unisolventer Ansatz-Raum auf Th, dann gibt es für jedes T ∈ Theine Basis {
ϕj |T ∈ ST∣∣ j ∈ I(T )}
von ST , so dass∀ i, j ∈ I(T ) : Ni(ϕj |T ) = δji .

30 KAPITEL 3. DIE FINITE-ELEMENTE-METHODE
Beweis.Sei also T ∈ Th beliebig, sei l := dim(ST ) und es sei ψ1, . . . , ψl eine beliebige Basis von ST .Da Sh unisolvent ist, gilt card(I(T )) = l.O.B.d.A. sei I(T ) = {1, . . . , l}, ansonsten nummeriere man die Knotenfunktionale um, danndefinieren wir die Matrix N ∈ R
l×l durch
N :=
⎡⎢⎣N1(ψ1) · · · N1(ψl)...
. . ....
Nl(ψ1) · · · Nl(ψl)
⎤⎥⎦ (3.33)
Annahme: N ist singulär, d.h.
∃ x ∈ Rn \ {0} : Nx = 0. (∗)
Nach Definition von N gilt also für jedes i ∈ {1, . . . , l}
0 =
l∑k=1
Nik · xk
=
l∑k=1
Ni(ψk) · xk
= Ni
( l∑k=1
ψk · xk).
Die Unisolvenz von Sh impliziert nun
l∑k=1
ψk · xk = 0,
und, da ψ1, . . . , ψl eine Basis von ST bilden, folgt unmittelbar x = 0 – dies steht aber imWiderspruch zu (∗) – also ist N regulär.Wir setzen nun
A := N−1
und definieren für jedes j ∈ {1, . . . , l} = I(T )
ϕj |T :=l∑
k=1
Akj · ψk,
dann gilt für jedes i ∈ {1, . . . , l} = I(T )
Ni(ϕj |T ) = Ni
( l∑k=1
Akj · ψk
)
=l∑
k=1
Akj · Ni(ψk)
=
l∑k=1
Akj ·Nik,
d.h. Ni(ϕj |T ) entspricht dem (i, j)-ten Eintrag des Matrix-Produktes
N · A = N ·N−1 = id,
also istNi(ϕj |T ) = δji .
�

3.3. KONSTRUKTION VON ANSATZ-RÄUMEN 31
Mit dem Beweis des vorangegangen Satzes haben wir keine rein theoretische Existenz-Aussage erhalten, sondern sogar eine implementierbare Methode, mit welcher wir für einenbeliebigen unisolventen Ansatz-Raum Sh auf jeder Zelle T ∈ Th die Einschränkung ϕj |T ∈ST einer Basisfunktion ϕj ∈ Sh aus (3.29) berechnen können. Wir können also ausgehend voneiner beliebigen Basis ψ1, . . . , ψl von ST – für ST = Pn
k beispielsweise die Standard-Monom-Basis – durch Berechnung und Invertierung der Matrix N aus (3.33) die Basisfunktionenϕj |T , welche auf der Zelle T nicht konstant Null sind, als Linearkombinationen von ψ1, . . . , ψl
ausdrücken.
Wir haben zu Beginn dieses Abschnittes in Satz 3.3.1 gesehen, dass die Teilraum-BeziehungSh ⊂ H1(Ω) zu Sh ⊂ C0(Ω) äquivalent ist, falls Sh|T ⊂ C0(T )∩H1(T ) gilt, und wollen daherdie Forderung Sh ⊂ C0(Ω) genauer betrachten.Betrachten wir ein einzelnes Knotenfunktional Ni eines allgemeinen unisolventen Ansatz-Raumes Sh und zwei T, T ′ ∈ Th, so dass i ∈ I(T ) ∩ I(T ′), dann gilt nach (3.32) für jedeBasisfunkion ϕj nach Konstruktion gerade
Ni(ϕj |T ) = δji
Ni(ϕj |T ′) = δji
und somit also zwangsläufigNi(ϕj |T ) = Ni(ϕj |T ′).
Da dies nun für jede Basisfunktion ϕj gilt erhalten wir also für ein beliebiges ϕ ∈ Sh
Ni(ϕ|T ) = Ni(ϕ|T ′). (3.34)
für zwei beliebige T, T ′ ∈ Th und jedem Knotenfunktional Ni mit i ∈ I(T ) ∩ I(T ′).Im Beispiel des P1(Th)-Elementes entsprach die Anwendung von Ni auf ϕ gerade der Aus-wertung von ϕ im Knoten vi, d.h. es gilt also für jedes ϕ ∈ P1(Th) gerade
ϕ|T (vi) = ϕ|T ′(vi) (3.35)
und dies entspricht gerade der Stetigkeit in den Knoten.Betrachten wir nun ein beliebiges
ϕ : Ω→ R : ∀ T ∈ Th : ϕ|T ∈ Pn1 ,
welches für jeden Knoten vi ∈ Vh und jedes Paar T, T ′ ∈ Th mit vi ∈ V(T ) ∩ V(T ′) gerade(3.35) erfüllt, so ist ϕ in jedem Knoten vi stetig – und somit ϕ ∈ P1(Th).
Diese Beobachtung hat für allgemeine Ansatz-Räume eine wichtige Konsequenz: Wir könnenden Ansatz-Raum Sh über seinen lokalen Spann ST und die Menge seiner KnotenfunktionaleN1, . . . ,Nm durch die Eigenschaft
ϕ : Ω→ R : ∀ T ∈ Th : ϕ|T ∈ ST
sowie ∀ i ∈ {1, . . . ,m} und ∀ T, T ′ ∈ Th mit i ∈ I(T ) ∩ I(T ′) mit der Forderung
Ni(ϕ|T ) = Ni(ϕ|T ′ )
eindeutig charakterisieren. Im Falle des P1-Raumes haben wir die Knotenfunktionale, imnachhinein betrachtet, so gewählt, dass der konstruierte Raum stetig ist. In vielen Fällensind die Knotenfunktionale jedoch beispielsweise durch die physikalische Motivation des zulösenden Problems gegeben, und dienen nicht notwendigerweise der Durchsetzung der Ste-tigkeit. Eben diese Räume, welche die Forderung Sh ⊂ H1
0(Ω) z.B. aufgrund der mangelndenStetigkeit verletzen, werden als nicht-konforme Ansatz-Räume bezeichnet, und wir werdenin Kapitel 4 ein Beispiel hierfür sehen.

32 KAPITEL 3. DIE FINITE-ELEMENTE-METHODE
3.4 Parametrische Ansatz-Räume
Wir haben die Zellen T eines Qn1 -Gitters Th über eine Transformation FT : T → T definiert,
wobei T eine fest gewählte Referenz-Zelle ist. Aus diesem Ansatz lässt sich ein wichtigerSpezialfall der Ansatz-Räume herleiten: die sogenannten parametrischen Ansatz-Räume.Die Idee bei parametrischen Ansatz-Räumen besteht darin, einen Referenz-Spann S auf Tzu wählen und für jedes T ∈ Th den lokalen Spann ST von Sh über die Transformation FT
zu definieren:ST :=
{ϕ ◦ F−1
T
∣∣ ϕ ∈ S }(3.36)
Es stellt sich nun die Frage, ob, und wenn ja, unter welchen Voraussetzungen die Teilraum-Beziehung
∀ T ∈ Th : Pnk ⊆ ST
für ein k ∈ N0 erfüllt ist. Wir wollen dies untersuchen und stellen dafür zunächst zweiHilfssätze vor.
Hilfssatz 3.4.1Es seien k,m ∈ N0 und n ∈ N beliebig, dann gilt:
1. ∀ p ∈ Pnk , q ∈ Pn
m : p · q ∈ Pnk+m,
2. ∀ p ∈ Qnk , q ∈ Qn
m : p · q ∈ Qnk+m.
Beweis.Seien p ∈ Pn
k , q ∈ Pnm beliebig, dann existieren Koeffizienten aα, bβ ∈ R, so dass:
p(x) =∑|α|≤k
aα · xα
q(x) =∑
|β|≤m
bβ · xβ
Es gilt
p(x) · q(x) =( ∑
|α|≤k
aα · xα)·( ∑
|β|≤m
bβ · xβ)
=∑|α|≤k
(aα · xα ·
( ∑|β|≤m
bβ · xβ))
=∑|α|≤k
(aα ·
( ∑|β|≤m
bβ · xα · xβ))
=∑|α|≤k
(aα ·
( ∑|β|≤m
bβ · xα+β))
.
Nun ist |α+ β| = |α|+ |β| ≤ k +m, d.h. also p · q ∈ Pnk+m.
Der Beweis für die Q-Polynome verläuft analog. �
Hilfssatz 3.4.2Es seien k, n ∈ N beliebig, dann gilt:{
p ◦ (q1, . . . , qn)∣∣ p ∈ Pn
k ; q1, . . . , qn ∈ Pn1
}⊆ Pn
k ,{p ◦ (q1, . . . , qn)
∣∣ p ∈ Pnk ; q1, . . . , qn ∈ Qn
1
}⊆ Qn
k .

3.4. PARAMETRISCHE ANSATZ-RÄUME 33
Beweis.Seien k, n ∈ N beliebig, und es seien p ∈ Pn
k und q1, . . . , qn ∈ Qn1 , dann ist nach Definition
p ◦ (q1, . . . , qn) =∑|α|≤k
aα ·n∏
i=1
qαi
i
für gewisse Koeffizienten aα ∈ R. Nach Hilfssatz 3.4.1 ist nun jedes qαi
i ∈ Qnαi
und,aufgrund von |α| =
∑αi, folgt ebenfalls nach Hilfssatz 3.4.1
∏qαi
i ∈ Qn|α|. Da |α| ≤ k,
folgt hiermit p ◦ (q1, . . . , qn) ∈ Qnk .
Der Beweis für die P-Polynome verläuft analog. �
Mit dem Hilfssatz 3.4.2 können wir nun hinreichende Voraussetzungen an den Referenz-Spann S stellen, unter welchen jeder lokale Spann ST eines parametrischen Ansatz-RaumesSh den Raum Pn
k enthält. Wir wollen hierbei, wie bereits in den vorangegangenen HilfssätzenzwischenQn
1 -Transformationen und Pn1 -Transformationen unterscheiden, da wir im letzteren
Fall mit einer schwächeren Forderung auskommen.
Korollar 3.4.3Es seien k, n ∈ N beliebig.Ist Qn
k ⊆ S, so gilt Pnk ⊆ ST für jedes bijektive Qn
1 -Vektorfeld FT : T → T .Ist Pn
k ⊆ S, so gilt Pnk ⊆ ST für jedes bijektive Pn
1 -Vektorfeld FT : T → T .
Beweis.Seien k, n ∈ N beliebig, und es sei ϕ ∈ Pn
k beliebig. Wenn ϕ ∈ ST ist, so existiert nach(3.36) ein ϕ ∈ S, so dass ϕ ◦FT = ϕ. Im Falle eines Qn
1 -Vektorfeldes liefert Hilfssatz 3.4.2ϕ ∈ Qn
k , für ein Pn1 -Vektorfeld ist ϕ ∈ Pn
k . �
Für ein Qn1 -Gitter also die Forderung Qn
k ⊆ S für Pnk ⊆ ST hinreichend – es kann darüber
hinaus auch gezeigt werden (vgl. [19]), dass Qnk ⊆ S sogar notwendig ist, wenn Pn
k ⊆ STfür jede bijektive Qn
1 -Transformation FT gelten soll. Im Falle von Simplex-Gittern oder af-fin äquivalenten Qn
1 -Gittern (vgl. Definition 3.2.8) ist nach dem vorangegangen Korollarbereits Pn
k ⊆ S hinreichend.
In Analogie zu den Pk(Th)-Räumen für Simplex-Gitter aus Beispiel 3.3.2 wollen wir andieser Stelle die Standard-Ansatz-Räume für Qn
1 -Gitter angeben.
Beispiel 3.4.4Sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei Th ein Qn1 -Gitter auf Ω. Für k ∈ N setzen wir
Qk(Th) :={ϕ ∈ C0(Ω)
∣∣∣ ∀ T ∈ Th :(ϕ|T ◦ F−1
T
)∈ Qn
k
}⊂ H1(Ω).
Wir wollen als nächsten Schritt die Knotenfunktionale eines parametrischen Ansatz-RaumesSh betrachten und auch für diese einen Zusammenhang zur Referenz-Zelle T herstellen, je-doch begnügen wir uns an dieser Stelle damit, eine formale Forderung an die Knotenfunktio-nale N1, . . . ,Nm zu stellen anstatt diese über die Transformation FT : T → T zu definieren.Für die KnotenfunktionaleN1, . . . ,Nm eines parametrischen Ansatz-Raumes Sh fordern wir,dass für l := dim(S) eine Menge von Referenz-Knotenfunktionalen
N1, . . . , Nl : S → R, linear und stetig
existiert, so dass auf jeder Zelle T ∈ Th mit einer geeigneten Bijektion
jT : {1, . . . , l} → I(T )
für jedes ϕ ∈ ST∀ k ∈ {1, . . . , l} : NjT (k)(ϕ) = Nk(ϕ ◦ FT ) (3.37)

34 KAPITEL 3. DIE FINITE-ELEMENTE-METHODE
gilt, d.h. die Anwendung eines Knotenfunktionals Nj auf ein ϕ ∈ ST soll gerade der Anwen-dung eines Referenz-Knotenfunktionals Nk auf ϕ ◦ FT entsprechen.
Betrachten wir nun die Basisfunktionen ϕ1, . . . , ϕm eines unisolventen parametrischen Ansatz-Raumes Sh, welche durch
∀ T ∈ Th : ∀ i, j ∈ I(T ) : Ni(ϕj |T ) = δji
definiert sind. Sei T ∈ Th beliebig, dann setzen wir für jedes k ∈ {1, . . . , l}
ϕk := ϕjT (k)|T ◦ FT , (3.38)
dann gilt nach ∀ i, j ∈ {1, . . . , l}
Ni(ϕj) = Ni(ϕjT (j)|T ◦ FT )
und aus (3.37) folgtNi(ϕj) = NjT (i)(ϕjT (j)|T ).
Da jT als bijektiv vorausgesetzt ist, gilt also
NjT (i)(ϕjT (j)|T ) = δji
und somit erhalten wir letztendlich
∀ i, j ∈ {1, . . . , l} : Ni(ϕj) = δji . (3.39)
Wir können den gerade zurückgelegten Weg nun umkehren: Haben wir mit ϕ1, . . . , ϕl eineBasis des S gegeben, welche (3.39) erfüllt, so können wir aus dieser für jedes T ∈ Th fürj ∈ I(T ) die Basisfunktionen ϕj |T ∈ ST , welche
∀ i, j ∈ I(T ) : Ni(ϕj |T ) = δji
erfüllen, nach (3.38) durchϕj |T := ϕj−1
T (j) ◦ F−1T (3.40)
angeben.
Wir wollen an dieser Stelle noch die Frage nach der Unisolvenz klären. Wir haben im vor-herigen Abschnitt gesehen, dass wir, um die Basisfunktionen ϕ1, . . . , ϕm von Sh berechnenzu können, Sh als unisolvent voraussetzen müssen. Analog dazu muss also, damit wir nach(3.39) eine Basis ϕ1, . . . , ϕl von S angeben können, die Menge der Referenz-Knotenfunktio-nale N1, . . . , Nl mit dem Referenz-Spann S ein unisolventes Paar bilden, und wir wollen mitfolgenden Satz zeigen, dass dies eine zur Unisolvenz von Sh äquivalente Forderung darstellt.
Satz 3.4.5Sei Sh ein parametrischer Ansatz-Raum. Sh ist unisolvent genau dann wenn für ϕ ∈ S aus
∀ i ∈ {1, . . . , l} : Ni(ϕ) = 0
direkt ϕ = 0 folgt.
Beweis.„=⇒“:Es sei ϕ ∈ S, so dass
∀ i ∈ {1, . . . , l} : Ni(ϕ) = 0 (∗)gilt. Sei nun T ∈ Th beliebig, dann setzen wir
ϕ := ϕ ◦ F−1T ,

3.4. PARAMETRISCHE ANSATZ-RÄUME 35
und nach (3.37) folgt aus (∗) somit
∀ i ∈ I(T ) : Ni(ϕ) = 0.
Nach (3.36) ist ϕ ∈ ST und da Sh unisolvent ist, folgt ϕ = 0 und somit, da FT nach Vor-aussetzung bijektiv ist, unmittelbar ϕ = 0.
„⇐=“:Nach (3.36) und (3.37) gilt für jedes T ∈ Th
dim(ST ) = dim(S) = l = card(I(T )),
womit die erste Voraussetzung für die Unisolvenz von Sh gezeigt ist.Sei nun T ∈ Th beliebig und es sei ϕ ∈ ST , so dass
∀ i ∈ I(T ) : Ni(ϕ) = 0. (∗∗)
Wir setzenϕ := ϕ ◦ FT ,
dann folgt nach (3.37) aus (∗∗) wiederrum
∀ i ∈ {1, . . . , l} : Ni(ϕ) = 0.
Nach Voraussetzung impliziert dies nun ϕ = 0, und somit ist nach der Bijektivität von FT
also ϕ = 0. �
Zum Abschluß dieses Abschnittes wollen wir noch eine Definition angeben.
Definition 3.4.6: Parametrische FamilieEs sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei (Th) eine Gitter-Folge auf Ω. Es sei auf jedemGitter Th der Folge ein unisolventer parametrischer Ansatz-Raum Sh gegeben, so dass derReferenz-Spann S und die Menge der Referenz-Knotenfunktionale N1, . . . , Nl für jedes Shübereinstimmen, dann bezeichnen wir die Folge der Ansatz-Räume (Sh) als parametrischeFamilie auf (Th).

36 KAPITEL 3. DIE FINITE-ELEMENTE-METHODE
Kapitel 4
Die Qk-Elemente
Wir wollen in diesem Kapitel drei Varianten eines Ansatz-Raumes vorstellen, welche auf ei-ne nicht-konforme Finite-Elemente Methode führen, d.h. sie verletzen die vom Céa-Lemmageforderte Teilraum-Beziehung Sh ⊂ H1
0(Ω). Obwohl uns diese Eigenschaft zunächst unse-rer theoretischen Motivation beraubt, werden wir in Kapitel 5 nachweisen können, dassdiese Räume trotzdem zur Lösung partieller Differentialgleichungen wie z.B. der Poisson-Gleichung geeignet sind.
Die Ansatz-Räume, welche wir hier betrachten möchten, wurden für den zwei-dimensio-nalen Fall rechteckiger Gitter-Zellen bereits 1985 von Brezzi, Douglas und Marini in [22]vorgestellt und analysiert. Drei Jahre später haben Hennart, Jaffre und Roberts in [15] dieseVorarbeiten erweitert und darüber hinaus die Elemente auch für den drei-dimensionalen Fallquaderförmiger Gitter-Zellen vorgestellt. Unabhängig davon stellten Rannacher und Turekin [14] insgesamt vier Varianten eines nicht-konformen Ansatz-Raumes vor, von denen eineim Spezialfall rechteckiger bzw. quaderförmiger Gitter-Zellen mit denen von Hennart et al.vorgestellten Elementen erster Ordnung übereinstimmt, und untersuchten deren Verhaltenim zwei-dimensionalen auch für nicht affin äquivalente Gitter-Folgen. Matthies hat in [21]darüber hinaus den Nachweis der inf-sup-Stabilität dieser Elemente in Kombination mit un-stetigen Druck-Ansatz-Räumen erbracht.
In [13] wurden diese Elemente von Köster, Ouazzi, Schieweck, Turek und Zajac wiederaufgegriffen, wobei zum ersten Mal auch Varianten höherer Ordnung vorgestellt wurden,welche – im Gegensatz zu den bis dahin veröffentlichten Resultaten – selbst auf nicht af-fin äquivalenten Gitter-Folgen optimale Fehler-Abschätzungen erlauben. Die insgesamt dreiVarianten der Qk-Elemente, welche wir im Folgenden betrachten wollen, sind aus dieser Ver-öffentlichung1 übernommen.
Im Gegensatz zu vielen anderen Ansatz-Räumen, wie beispielsweise die in Beispiel 3.3.2und Beispiel 3.4.4 vorgestellten Pk- und Qk-Elemente, stehen bei den Qk-Elementen dieKnotenfunktionale im Vordergrund, d.h. wir werden zunächst eine Menge von Knotenfunk-tionalen vorgeben, welche wir für den Ansatz-Raum Qk benutzen möchten, und werdenanschließend versuchen, einen lokalen Spann ST zu konstruieren, so dass die Unisolvenz desresultierenden Ansatz-Raumes gewährleistet ist.
4.1 Die Knotenfunktionale
In diesem Abschnitt wollen wir zwei Mengen von Knotenfunktionalen definieren, welchewir für alle drei Varianten der Qk-Elemente verwenden werden, nämlich die Flächen-Momente, welche jeweils einer (n − 1)-dimensionalen Seitenfläche E ∈ E(n−1)
h zugeordnetsind, sowie die Bubble-Funktionale, welche jeweils einer einzelnen Zelle T ∈ Th zugeord-
1Welche sich zur Zeit im Review befindet.
37

38 KAPITEL 4. DIE QK-ELEMENTE
net sind.
Bevor wir mit den Definitionen der Knotenfunktionale beginnen können, möchten wir inder nun folgenden Definition die mehrdimensionalen Legendre-Polynome angeben.
Definition 4.1.1: Legendre-PolynomeFür k ∈ N0 bezeichnen wir mit Lk(x) ∈ P1
k die Legendre-Polynome, welche durch diezweistufige Rekursionsformel
L0(x) := 1, L1(x) := x,
Lk+1(x) :=(2k + 1)xLk(x)− kLk−1(x)
k + 1
gegeben sind.Für ein α ∈ N
n0 bezeichnen wir mit
Lα(x1, . . . , xn) :=
n∏i=1
Lαi(xi) (4.1)
das n-dimensionale Legendre-Polynom zum Multiindex α.
Wir wollen zunächst mit den Bubble-Funktionalen anfangen, da wir bereits alle für dieDefinition nötigen Terme im Verlauf der vorherigen Kapitel definiert haben.
Definition 4.1.2: Bubble-FunktionaleSei Th einQn
1 -Gitter. Für ein T ∈ Th und ein α ∈ Nn0 definieren wir das Bubble-Funktional
auf T zum Index α durch
NαT (ϕ) :=
1
|T |
ˆT
ϕ(FT (x)) · Lα(x) dx. (4.2)
Ein Bubble-FunktionalNαT beschreibt also ein mit dem Legendre-Polynom Lα(x) gewichtetes
Integral-Mittel auf der Referenz-Zelle T , und ist somit nach Konstruktion linear und stetig.Es sei an dieser Stelle angemerkt, dass mit
NαT(ϕ) :=
1
|T |
ˆT
ϕ(x) · Lα(x) dx (4.3)
für jedes α ∈ Nn0 nach Konstruktion für jede Zelle T ∈ Th die Beziehung
NαT (ϕ) = Nα
T(ϕ ◦ FT )
erfüllt ist. Diese Eigenschaft der Knotenfunktionale haben wir in Abschnitt 3.4 gefordert,um einen parametrischen Ansatz-Raum erhalten zu können. Dies wird für die ersten beidenVarianten des Qk-Elementes, welche wir in den nächsten beiden Abschnitten dieses Kapitelsvorstellen möchten, von Interesse sein, da diese parametrisch sein werden.
Wir wollen nun die Flächen-Momente definieren, welche, genau wie die Bubble-Funktionale,ein mit einem Legendre-Polynom Lα(x) gewichtetes Integralmittel darstellen sollen, jedochnicht auf den Zellen T ∈ Th, sondern auf den (n−1)-dimensionalen Seitenflächen E ∈ E(n−1)
h .Wir wollen dabei das Integral ebenfalls mit Hilfe der Transformations-Formel aus Satz 2.3.4auf einer Referenz-Seitenfläche E darstellen, welche wir nun mitsamt ihrer dazugehörigenParametrisierung FE : E → E definieren möchten.
Definition 4.1.3: Flächen-ParametrisierungSei n ∈ N, n ≥ 2, dann definieren wir die Referenz-Seitenfläche
E := (−1, 1)n−1.

4.2. DIE PARAMETRISCHE STANDARD-VARIANTE: QK 39
Für eine Seitenfläche E ∈ E(n−1)h eines Qn
1 -Gitters Th definieren wir die Parametrisierungvon E
FE : E ⊂ Rn−1 → E ⊂ R
n,
FE(x) =(F
(1)E (x), . . . , F
(n)E (x)
),
wobei jede Komponente F (k)E von eine Qn−1
1 -Funktion ist, so dass FE die Knoten von E aufdie Knoten von E abbildet.
Die Flächen-Parametrisierung FE ist also genau wie FT eine Q1-Transformation, welche dieKnoten eines Referenz-Objektes auf die Knoten von E bzw. T abbildet. Für eine beliebigegegebene Seitenfläche E ∈ E(n−1)
h kann die dazugehörige Parametrisierung beispielsweiseüber die Lagrange’schen Interpolations-Polynome (vgl. z.B. [12, Abschnitt 2.1]) angegebenwerden.
Mit Hilfe der Flächen-Parametrisierung können wir nun die Flächen-Momente definieren.
Definition 4.1.4: Flächen-MomenteFür eine Seitenfläche E ∈ E(n−1)
h und ein α ∈ Nn−10 definieren wir das Flächen-Moment
zum Index α durchNα
E (ϕ) :=1
|E|
ˆE
ϕ(FE(x)) · Lα(x) dx. (4.4)
Auch hier sei angemerkt, dass wir eine Menge von Referenz-Knotenfunktionalen
NαE (ϕ) :=
1
|E|
ˆE
ϕ(FE(x)) · Lα(x) dx. (4.5)
für jede Seitenfläche E ∈ E(n−1)(T ) definieren können.Betrachten wir ein beliebiges T ∈ Th und eine dazu adjazente Seitenfläche E ∈ E(n−1)(T ),so existiert nach Definition 3.2.5 eine Seitenfläche E′ ∈ E(n−1)(T ) der Referenz-Zelle, sodass unter der Transformation FT : T → T gerade
FT (E′) = E
gilt, und somit ergibt sich für die beiden Parametrisierungen FE : E → E und F ′E : E → E′
über FT die BeziehungFT ◦ F ′
E = FE .
Ist nun α ∈ Nn−10 , so gilt
NαE (ϕ ◦ FT ) =
1
|E|
ˆE
ϕ(FT ◦ F ′E(x))) · Lα(x) dx
=1
|E|
ˆE
ϕ(FE(x))) · Lα(x) dx
= NαE (ϕ).
4.2 Die parametrische Standard-Variante: Qk
In diesem Abschnitt wollen wir die in [13, Abschnitt 3] vorgestellte parametrische Variantedes Qk-Elementes angeben. Dazu wollen wir zunächst für jedes k ∈ N angeben, aus welchenin Abschnitt 4.1 vorgestellten Flächen-Momenten und Bubble-Funktionalen wir die Mengeder Knotenfunktionale zusammensetzen möchten.

40 KAPITEL 4. DIE QK-ELEMENTE
Für k ∈ N besteht die Menge aller für das Qk-Element verwendeten Knotenfunktionaleaus {
NαE
∣∣∣ E ∈ E(n−1)h , α ∈ N
n−10 : |α| ≤ k − 1
}(4.6)
∪{Nα
T
∣∣∣ T ∈ Th, α ∈ Nn0 : |α| ≤ k − 2
}. (4.7)
Hierbei ist zu beachten, dass im Falle k = 1 die zweite Menge leer ist, d.h. das Q1-Elementbesitzt keine Bubble-Funktionale.
Die Variante des Qk-Elementes, welche wir in diesem Abschnitt betrachten möchten, istein parametrischer Ansatz-Raum, d.h. wir wollen wie in Abschnitt 3.4 den lokalen SpannST über die Transformation FT : T → T durch einen Referenz-Spann S definieren. Dawir die Qk-Elemente auf Qn
1 -Gittern betrachten, wäre es also wünschenswert, den Referenz-Spann S so zu wählen, dass er den Qn
k als Teilraum enthält, da wir nach Korollar 3.4.3somit auf jeder Zelle T ∈ Th die Beziehung Pn
k ⊆ ST erhielten.
Bedauerlicherweise muss man schon im zwei-dimensionalen Fall für k = 1 feststellen, dassdiese Forderung nicht sinnvoll ist. Da in diesem Falle für die Referenz-Knotenfunktionale in(4.5) nur α = (0, 0) in Betracht kommt, vereinfachen sich diese zu
NE(ϕ) =1
2
ˆE
ϕ(x) dx.
Wendet man diese nun auf den im Q21 enthaltenen bilinearen Term xy an, so stellt man
fest, dass für jede Seitenfläche E ∈ E(n−1)(T ) gerade NE(xy) = 0 gilt – dies impliziert aberschon, dass der aus der Wahl S := Q2
1 resultierende Raum nicht unisolvent sein kann.
In [14] haben Rannacher und Turek den Fall k = 1 untersucht und stellten dabei eineinteressante Methode vor, wie der Referenz-Spann im Zwei-dimensionalen konstruiert wer-den kann: Sie haben den Q2
1 auf dem um π4 (45◦) gedrehten Referenz-Viereck betrachtet.
Durch diese Konstruktion ergibt sich für das Q1-Element also der Referenz-Spann
S :={ϕ ◦ (x+ y, x− y)
∣∣ ϕ ∈ Q21
}= span
{1, x+ y, x− y, x2 − y2
}= span
{1, x, y, x2 − y2
}. (4.8)
Diese Konstruktion verleiht dem Rannacher-Turek-Element auch den Namen „rotiert-bili-neares Element“.
Darüber hinaus wurde die von uns in (4.3) und (4.5) gewählte Menge an Referenz-Kno-tenfunktionalen bereits von Hennart, Jaffré und Roberts in [15] untersucht. Insbesonderehaben die Autoren eine Methode angegeben, mit deren Hilfe der Referenz-Spann für einbeliebiges k ∈ N so konstruiert werden kann, dass die Unisolvenz des resultierenden Raumesgesichert ist. Da die Herleitung dieser Methode jedoch den Rahmen dieser Arbeit sprengenwürde, verweisen wir den interessierten Leser hierfür an [15, Beispiel 5], und begnügen unsan dieser Stelle damit, den Referenz-Spann für den zwei-dimensionalen Fall in der folgendenDefinition anzugeben.
Definition 4.2.1: 2D-Referenz-SpannFür n = 2 und k ∈ N ist der Referenz-Spann Sk des zwei-dimensionalen Qk-Elementesgegeben durch
Sk := P2k ⊕Ak ⊕ Bk ⊕ Ck,

4.2. DIE PARAMETRISCHE STANDARD-VARIANTE: QK 41
wobei
Ak := span{xi+2yi − xiyi+2
∣∣∣ ⌊k2
⌋≤ i ≤ k − 1
},
Bk := span{xi+1yi, xiyi+1
∣∣∣ ⌊k+12
⌋≤ i ≤ k − 1
},
Ck := span{xiyi
∣∣∣ ⌊k+22
⌋≤ i ≤ k − 1
}.
Hierbei ist Bk = {0} für k < 2 und Ck = {0} für k < 3.
Beispiel 4.2.2Für k ∈ {1, 2, 3} ist der Referenz-Spann Sk des zwei-dimensionalen Qk-Elementes gegebendurch
S1 = span{1, x, y, x2 − y2
}, (4.9)
S2 = span{1, x, y, x2, xy, y2, x2y, xy2, x3y − xy3
}, (4.10)
S3 = span{1, x, y, x2, xy, y2, x3, x2y, xy2, y3,
x2y2, x3y2, x2y3, x3y − xy3, x4y2 − x2y4}. (4.11)
Auch für den drei-dimensionalen Fall haben Hennart et al. eine konstruktive Methode ange-geben, wie der Referenz-Spann zu berechnen ist. In einer Bemerkung schreiben sie „our nodalfinite elements are clearly potential monsters“, und dies ist für den Referenz-Spann im drei-dimensionalen wahrlich zutreffend. Wir verzichten an dieser Stelle, den drei-dimensionalenReferenz-Spann für allgemeines k ∈ N anzugeben, und verweisen den knobelfreudigen Leserhierzu an [15, Beispiel 10]. Wir wollen hier lediglich den drei-dimensionalen Referenz-Spannfür die Fälle k ∈ {1, 2} im folgenden Beispiel angeben.
Beispiel 4.2.3Für k ∈ {1, 2} ist der Referenz-Spann Sk des drei-dimensionalen Qk-Elementes gegebendurch
S1 := span{1, x, y, z, x2 − y2, y2 − z2
}, (4.12)
S2 := span{1, x, y, z, xy, xz, yz, x2, y2, z2,
xy2, x2y, x2z, xz2, y2z, yz2,
x3y − xy3, y3z − yz3, z3x− zx3}. (4.13)
Wir wollen nun auch noch die Unisolvenz der Qk-Räume bestätigen. Da der Nachweis aller-dings die genaue Verständnis der in [15] vorgestellten Methoden erfordert, wollen wir denBeweis hier nicht aufführen.
Satz 4.2.4: UnisolvenzFür k ∈ N sind die zwei- und drei-dimensionalen Räume Qk unisolvent.
Beweis.vgl. [15, Lemma 1, Lemma 2] �
Mit der Unisolvenz erhalten wir die wichtigste Eigenschaft, welche wir an einen Ansatz-Raum gestellt haben. Da wir bereits im vorherigen Abschnitt gesehen haben, dass sowohldie Flächen-Momente Nα
E als auch die Bubble-Funktionale NαT mit Hilfe der Transformation
FT : T → T auf eine Menge von Referenz-Knotenfunktionalen auf T zurückgeführt werdenkönnen, und darüber hinaus jeder lokale Spann ST ebenfalls über die Transformation FT
durch den Referenz-Spann Sk definiert ist, können wir dank der Vorarbeiten aus Abschnitt3.4 die Konstruktion der Basisfunktionen ϕ1, . . . , ϕm auf die Konstruktion einer Referenz-

42 KAPITEL 4. DIE QK-ELEMENTE
Basis des Sk zurückführen, was vor allem für den praktischen Einsatz von großem Vorteilist.
4.3 Die parametrische Variante mit Bubble: Qbk
Wir mussten im vorherigen Abschnitt mit Ernüchterung feststellen, dass sich bei unsererWahl der Knotenfunktionale der Qn
k nicht als Referenz-Spann für die Qk-Elemente eignet.Dennoch wollen wir uns davon nicht einschüchtern lassen und wollen im Folgenden den Re-ferenz-Spann Sk des Raumes Qk so erweitern, dass er den Qn
k als Teilraum enthält, undanschließend auch die Menge der Knotenfunktionale um weitere Bubble-Funktionale erwei-tern. Wir wollen uns hierbei jedoch auf den Fall n = 2 und k ∈ {1, 2} beschränken.
Betrachten wir den zwei-dimensionalen Referenz-Spann in Beispiel 4.2.2 genauer, so stellenwir fest, dass in S1 lediglich der bilineare Term xy und in S2 nur der biquadratische Termx2y2 zum Qn
k fehlt. In [13, Abschnitt 5.1] wird daher am Beispiel des Q2 vorgeschlagen,die neun Referenz-Basisfunktionen ϕ1, . . . , ϕ9 des S2, welche wir mit unseren Vorarbeitenaus Abschnitt 3.4 berechnen können, zu übernehmen, und eine neue zehnte Referenz-Basisfunktion ϕ10 wie folgt zu definieren:
ϕ10(x, y) := x2y2 −9∑
i=1
Ni(x2y2) · ϕi(x, y).
Diese Methode führt zwar auf eine Basis von
S2 ⊕ span{x2y2
},
jedoch ist die Basisfunktion ϕ10 nicht durch ein Knotenfunktional induziert, weshalb wirhier einen anderen Weg gehen wollen.
Zunächst erweitern wir für die Räume Q1 und Q2 den Referenz-Spann Sk jeweils um diezum Qn
k fehlenden Terme:
Sb1 := S1 ⊕ span
{xy
}(4.14)
Sb2 := S2 ⊕ span
{x2y2
}(4.15)
Da wir den Referenz-Spann Sbk gegenüber dem Sk nur erweitert aber nicht ersetzt haben,
bietet es sich natürlich an, auch die Knotenfunktionale des Qk zu übernehmen und zuerweitern. Hierzu fügen wir für den Qb
1 auf jeder Zelle T ∈ Th ein Bubble-Funktional NαT
vom Typ (4.2) mit α = (1, 1) bzw. für Qb2 mit α = (2, 2) hinzu. Wir wollen nun nachweisen,
dass der von uns konstruierte Raum Qbk auch unisolvent ist.
Satz 4.3.1Die Räume Qb
1 und Qb2 sind unisolvent.
Beweis.Wir zeigen hier nur den Fall Qb
2; der Beweis für Qb1 verläuft analog.
Sei nun ϕ ∈ Sb2 beliebig aber fest, dann existiert nach (4.15) ein ϕ ∈ S2 und ein a ∈ R, so
dassϕ = ϕ+ ax2y2.
Durch direktes Nachrechnen ergibt sich für das neu hinzugefügte Bubble-Funktional auf demReferenz-Element
N (2,2)T (ϕ ) = 0 ∀ ϕ ∈ S2,
N (2,2)T (x2y2) = 4
225 �= 0.

4.4. DIE NICHT-PARAMETRISCHE VARIANTE: QNK 43
Es ist alsoN (2,2)
T (ϕ) = N (2,2)T (ax2y2) = 4a
225 ,
und somit folgt aus N (2,2)T (ϕ) = 0 direkt ϕ = ϕ. Gilt darüber hinaus alle vom Q2-Element
übernommenen Referenz-Knotenfunktionale N ebenfalls N (ϕ) = 0, so folgt wegen ϕ = ϕ ∈S2 und der Unisolvenz des Q2 direkt ϕ = 0, und Satz 3.4.5 liefert die Unisolvenz vonQb
2. �
Nun haben wir einen Referenz-Spann Sbk, welcher wie gewollt den Qn
k als Teilraum enthält,sowie eine Menge von Knotenfunktionalen, mit deren Hilfe wir nun nach den Vorarbeitenaus Abschnitt 3.4 einen unisolventen Raum Qb
k erhalten.
4.4 Die nicht-parametrische Variante: Qnk
Rannacher und Turek haben in [14] eine nicht-parametrische Variante ihres Q1-Elementesvorgestellt, welche sich vor allem in der praktischen Anwendung großer Beliebtheit erfreut.Diese Idee wurde in [13, Abschnitt 4] auch für die Qk-Elemente mit k ≥ 2 vorgeschlagen,und wir wollen diese Methode auch hier präsentieren.
Bei den parametrischen Qk- und Qbk-Elementen wird der lokale Spann ST , wie in Ab-
schnitt 3.4 vorgestellt, über das Bild des Referenz-Spanns Sk unter der Qn1 -Transformation
FT : T → T definiert. Nach Korollar 3.4.3 erhalten wir, da der Referenz-Spann Sk lediglichden Pn
k aber nicht den Qnk als Teilraum enthält, im Allgemeinen nur für affin äquivalente
Gitter die Beziehung Pnk ⊆ ST , welche, wie schon mehrfach erwähnt, für die spätere Fehler-
Analyse in Kapitel 5 entscheidend sein wird.
Für die Qnk -Elemente, welche wir in diesem Abschnitt behandeln wollen, wird daher ein
leicht anderer Weg eingeschlagen: Der lokale Spann ST wir auf jeder Zelle T ∈ Th überdas Bild von Sk unter der Linearisierung von FT definiert, wobei für jedes k ∈ N dieFlächen-Momente Nα
E und die Bubble-Funktionale NαT des parametrischen Qk-Elementes
aus Abschnitt 4.2 für das Qnk -Element übernommen werden.
Für jedes T ∈ Th definieren wir die Linearisierung FT der Transformation FT : T → Tim Punkt x = 0, d.h.
FT (x) := DFT (0) · x+ FT (0), (4.16)
dann wird der lokale Spann ST,k des Qnk -Elementes auf T in Analogie zu (3.36) über
ST,k :={ϕ ◦ F−1
T
∣∣ ϕ ∈ Sk} (4.17)
definiert, wobei Sk den Referenz-Spann des parametrischen Qk-Elementes bezeichnet, wel-chen wir in Abschnitt 4.2 angegeben haben. Da die Abbildung FT nach Konstruktionaffin ist, erfüllt das Qn
k -Element nach Korollar 3.4.3 nun die gewünschte VoraussetzungPnk ⊆ ST,k.
Wir müssen uns nun jedoch darüber im Klaren sein, dass das Urbild
T := F−1T (T ) (4.18)
im Allgemeinen nicht mit der Referenz-Zelle T übereinstimmt (vgl. Abbildung 4.1) – diesgilt nur dann, wenn die Transformation FT : T → T ohnehin affin ist und somit mit ihrerLinearisierung F identisch ist. Dies hat allem voran zur Folge, dass wir die in Abschnitt 3.4für parametrische Ansatz-Räume erarbeitete Theorie für das Qn
k -Element nicht anwendenkönnen, da es sich um ein nicht-parametrisches Element handelt. Lediglich im Falle affin

44 KAPITEL 4. DIE QK-ELEMENTE
T T
F−1T
Abbildung 4.1: Ein Viereck T (links) und sein Urbild T (rechts) unter F−1T .
äquivalenter Gitter ist dies möglich, denn dann fällt das Qnk -Element nach Konstruktion
gerade mit der parametrischen Standard-Variante Qk überein, welche wir in Abschnitt 4.2behandelt haben.
Eine praktische Herausforderung des nicht-parametrischen Qnk -Elemente stellt die Berech-
nung der Basisfunktionen ϕ1, . . . , ϕm dar. Für parametrische Ansatz-Räume konnten wirReferenz-Basisfunktionen ϕj auf dem Referenz-Element T ausrechnen und nach (3.40) fürjedes T ∈ Th die lokalen Funktionen ϕj |T mit Hilfe der Transformation durch
ϕj |T := ϕj ◦ F−1T
angeben. Für nicht-parametrische Elemente ist dies nicht möglich, d.h. die Basisfunktionenϕj |T müssen für jedes T ∈ Th separat berechnet werden. Die dafür notwendige Methodehaben wir im Beweis von Satz 3.3.4 vorgestellt, jedoch setzt dieser einen unisolventenAnsatz-Raum voraus. Tatsächlich stellt die Unisolvenz – oder besser gesagt ihr Nachweis –für das Qn
k -Element ein Problem dar, denn wir können uns hierbei nicht auf ein fest gewähl-tes Referenz-Element zurückziehen, sondern müssen die Voraussetzungen der Unisolvenz fürjede Zelle T ∈ Th nachweisen und bedauerlicherweise ist bis heute nicht klar, welche Voraus-setzungen an die Zellen T ∈ Th gestellt werden müssen, um den Nachweis der Unisolvenzliefern zu können.
Trotz dieses theoretischen Rückschlages werden die nicht-parametrischen Qnk -Elemente in
der Praxis häufig eingesetzt, wobei die Berechnung der Basisfunktionen, wie schon erwähnt,nach der in Satz 3.3.4 vorgestellten Methode vollzogen wird. Wir werden daher die Qn
k -Elemente in unsere numerischen Versuche in Kapitel 6 miteinbeziehen.

Kapitel 5
A-priori Fehler-Analyse
5.1 Das Berger-Scott-Strang-LemmaWir haben mit dem Céa-Lemma aus Satz 3.1.1 ein wichtiges Hilfsmittel für die a-prioriFehler-Analyse der Finite-Elemente-Methode kennengelernt. Da wir insbesondere die in Ka-pitel 4 vorgestellten Qk-Elemente analysieren möchten, müssen wir die Voraussetzungenauflockern, denn diese Familie ist nicht H1-konform, d.h. die vom Céa-Lemma geforderteTeilraum-Beziehung Sh ⊂ H1(Ω) ist verletzt. Wir wollen daher in diesem Abschnitt dasBerger-Scott-Strang-Lemma1 vorstellen, welches eine für unsere Bedürfnisse hinreichendeVerallgemeinerung des Céa-Lemmas darstellt. Im Gegensatz zu der in der Literatur übli-chen Vorgehensweise, welche die a-priori Fehler-Analyse für einen spezifischen Ansatz-RaumSh durchführt, wollen wir in diesem Abschnitt einen Gitter-abhängigen Oberraum schaffen,welcher sowohl den H1
0(Ω) als auch unsere nicht H1-konformen Qk-Elemente als Teilräumeenthält, und das Berger-Scott-Strang-Lemma auf diesem Oberraum formulieren.
Definition 5.1.1: Gebrochene Sobolev-RäumeSei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei Th ein Gitter auf Ω, und ferner sei k ∈ N0. Wirdefinieren den gebrochenen Sobolev-Raum Hk
h auf Th durch
Hkh(Th) :=
{u ∈ L2(Ω)
∣∣∣ ∀ T ∈ Th : u|T ∈ Hk(T )}
(5.1)
und darauf die gebrochenen Sobolev-Halb-Normen durch
|u|k,h :=( ∑
T∈Th
|u|2Hk(T )
) 12
. (5.2)
Zunächst stellen wir fest, dass wir mit dem Raum Hkh(Th) tatsächlich einen Oberraum des
Hk(Ω) geschaffen haben. Desweiteren ist für jedes u ∈ Hk(Ω) gerade |u|k,h = |u|Hk(Ω), d.h.auch die gebrochenen Sobolev-Halb-Normen stellen eine Verallgemeinerung der gewöhnli-chen Sobolev-Halb-Normen dar.
Wir haben uns bei der Herleitung der schwachen Formulierung der Poisson-Gleichung inAbschnitt 2.4 auf den Raum H1
0(Ω) eingeschränkt, damit die | · |H1(Ω)-Halb-Norm zu einerNorm wurde. Analog dazu wollen wir auch den Raum H1
h(Th) so einschränken, dass | · |1,h zueiner Norm wird, und müssen dafür fordern, dass aus |u|1,h = 0 direkt u = 0 folgt. Betrach-ten wir nun (5.1) und (5.2) genauer, so stellen wir fest, dass ein u ∈ H1
h(Th) mit |u|1,h = 0auf jedem T ∈ Th konstant ist. Wir müssen also einen Teilraum von H1
h(Th) konstruieren,welcher nur u = 0 als konstante Funktion zulässt. Um dies zu bewerkstelligen, wollen wirzunächst einen wichtigen Operator auf dem Raum H1
h(Th) definieren.
1Dieses Lemma wird oft auch als zweites Lemma von Strang bezeichnet, wir wollen hier jedoch dieNamensgebung aus [3] verwenden.
45

46 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
Definition 5.1.2: Sprung-OperatorSei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei Th ein Gitter auf Ω. Für eine SeitenflächeE ∈ E(n−1)
h definieren wir den linearen Sprung-Operator über E
[ · ]E : H1h(Th)→ L2(E),
wobei wir die folgende Unterscheidung treffen:
1. Ist E eine innere Seitenfläche, d.h.
∃ T1, T2 ∈ Th, T1 �= T2 : E ∈ E(n−1)(T1) ∩ E(n−1)(T2),
dann definieren wir den Sprung von u über E durch
[u]E := trace(u|T1)|E − trace(u|T2)|E . (5.3)
2. Ist E eine Rand-Seitenfläche, d.h.
∃! T ∈ Th : E ∈ E(n−1)(T ),
dann definieren wir den Sprung von u über E durch
[u]E := trace(u|T )|E . (5.4)
Bemerkung: Es ist zu beachten, dass für eine innere Seitenfläche E ∈ E(n−1) der Sprung [u]Enur bis auf das Vorzeichen eindeutig bestimmt ist, denn wir können in der Definition (5.3)einfach T1 und T2 vertauschen. Dies wird uns aber keine Probleme bereiten, da wir nichtam Vorzeichen des Sprungs interessiert sein werden.
Wir könnten nun bei der Formulierung des gesuchten Teilraumes fordern, dass für jedeFunktion u der Sprung [u]E gleich Null ist, jedoch würden wir damit an unserem Ziel,einen Oberraum der Qk-Elemente zu schaffen, vorbeischießen1. Dennoch können wir dieseIdee abschwächen, indem wir fordern, dass lediglich der Mittel-Wert des Sprunges über jedeSeitenfläche E gleich Null ist.
Satz 5.1.3Sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei Th ein Gitter auf Ω, dann ist die | · |1,h-Halb-Normauf dem Raum
H10(Th) :=
{u ∈ H1
h(Th)∣∣∣ ∀ E ∈ E(n−1)
h :
ˆE
[u]E = 0}
(5.5)
eine Norm.
Beweis.O.B.d.A. sei Ω zusammenhängend, ansonsten wende man die nachfolgenden Schritte für jedeZusammenhangskompontente von Ω einzeln an.Da | · |1,h bereits eine Halb-Norm ist, muss nur noch gezeigt werden, dass für u ∈ H1
0(Th)aus |u|1,h = 0 direkt u = 0 folgt. Sei also u ∈ H1
0(Th), so dass |u|1,h = 0, dann ist nach (5.2)u auf jedem T ∈ Th konstant. Sei nun E ∈ E(n−1) eine beliebige innere Seitenfläche von Th,d.h.
∃ T1, T2 ∈ Th, T1 �= T2 : E ∈ E(n−1)(T1) ∩ E(n−1)(T2).
Da u auf jedem T ∈ Th konstant ist, ist auch der Sprung [u]E nach (5.3) konstant. Da nachVoraussetzung
´E [u]E = 0 gilt, muss [u]E = 0 und somit u|T1 = u|T2 gelten. Da E eine
beliebige innere Kante war, folgt somit dass u auf ganz Ω konstant2 ist. Sei nun E ∈ E(n−1)
eine beliebige Rand-Seitenfläche, dann folgt, da u konstant ist, aus´E[u]E = 0 nach (5.4)
direkt u = 0. �1Obendrein würde uns diese Forderung wieder auf den Raum H1
0(Ω) führen.2An dieser Stelle fließt ein, dass Ω als zusammenhängend vorausgesetzt wurde.

5.1. DAS BERGER-SCOTT-STRANG-LEMMA 47
Wir haben mit dem Raum H10(Th) nun einen Raum erschaffen, auf dem | · |1,h eine Norm
ist und welcher den H10(Ω) als Teilraum enthält. Wir werden in Abschnitt 5.5 nachweisen,
dass auch unsere Qk-Elemente in diesem Raum enthalten sind, womit wir unsere Suche nacheinem geeigneten Raum abschließen können.
In Analogie zum Céa-Lemma möchten wir natürlich eine diskrete Lösung uh ∈ Sh ⊂ H10(Th)
mit der exakten Lösung u ∈ H10(Ω) einer Gleichung
a(u, ϕ) = b(ϕ) ∀ϕ ∈ H10(Ω) (5.6)
vergleichen, wobei a und b beispielsweise durch die schwache Formulierung der Poisson-Gleichung
a(u, ϕ) :=
ˆΩ
∇u · ∇ϕ (5.7)
b(ϕ) :=
ˆΩ
f · ϕ (5.8)
mit einem f ∈ L2(Ω) gegeben sind. Hierbei stellen wir fest, dass die Bilinearform a imAllgemeinen nicht auf Funktionen uh ∈ H1
0(Th) angewendet werden kann, da ∇uh nichtnotwendigerweise definiert ist. Wir müssen also für die Bilinearform aus (5.7) – und somitauch für die Gleichung (5.6) – eine diskrete Entsprechung finden, welche bereits für uh, ϕh ∈H1
0(Th) definiert ist. Dafür bietet sich
ah(uh, ϕh) :=∑T∈Th
ˆT
∇uh · ∇ϕh (5.9)
als natürlicher Kandidat an, denn es gilt wieder ah(u, ϕ) = a(u, ϕ) für alle u, ϕ ∈ H10(Ω).
Wir können analog dazu auch
bh(ϕh) :=∑T∈Th
ˆT
f · ϕh (5.10)
definieren, um eine diskrete Linearform für die rechte Seite zu erhalten. Dies ist zwar in un-serem Falle nicht unbedingt notwendig, da die Linearform b aus (5.8) schon für ϕ ∈ L2(Ω)wohldefiniert ist, jedoch kann dies bei der Wahl einer anderen Linearform, z.B. wenn b denGradienten von ϕ enthält, notwendig sein.
Mit diesen Vorbereitungen können wir nun auch die diskrete Gleichung
ah(uh, ϕh) = bh(ϕh) ∀ϕh ∈ H10(Th) (5.11)
definieren. Um die Existienz einer eindeutigen Lösung uh ∈ H10(Th) von (5.11) zu gewähr-
leisten, müssen wir zeigen, dass die Bilinearform ah auf H10(Th) stetig und koerziv ist. Wir
wollen jedoch zuerst an das Céa-Lemma zurückdenken, welches uns eine Abschätzung vonder Form
|u− uh| ≤ c · infvh|u− vh|
lieferte, wobei die Konstante c lediglich von der Stetigkeit und der Koerzivität von a ab-hing. Wir wollen hier eine ähnliche Abschätzung erhalten und dabei stellt sich ein Problemheraus: Da die diskrete Bilinearform ah nach Konstruktion vom Gitter Th abhängt, müssenwir fordern, dass die Konstanten der Stetigkeit und der Koerzivität von ah nicht von derGitterweite h abhängen. Dies wollen wir in der folgenden Definition formalisieren.
Definition 5.1.4Sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei (Th) eine Gitter-Folge auf Ω. Eine Folge vondiskreten Bilinearformen ah : H1
0(Th)× H10(Th)→ R heißt gleichgradig koerziv, falls eine

48 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
von der Gitterweise h unabhängige Konstante c1 > 0 existiert, so dass für jedes Th derGitter-Folge (Th) für jedes uh ∈ H1
0(Th) die Abschätzung
ah(uh, uh) ≥ c1 · |uh|21,h (5.12)
gilt. Analog dazu heißt die Folge ah gleichgradig stetig, falls eine zweite von der Gitter-weise h unabhängige Konstante c2 > 0 existiert, so dass für jedes Th der Gitter-Folge (Th)für alle uh, vh ∈ H1
0(Th) die Abschätzung
|ah(uh, vh)| ≤ c2 · |uh|1,h · |vh|1,h (5.13)
gilt.
Wir wollen nun nachweisen, dass die von uns konstruierten diskreten Bilinearformen in (5.9)diese Voraussetzungen erfüllen.
Satz 5.1.5Sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei (Th) eine Gitter-Folge auf Ω. Die Folge derdiskreten Bilinearformen aus (5.9) ist gleichgradig stetig und gleichgradig koerziv auf H1
0(Th)mit der Norm | · |1,h.
Beweis. Sei Th ein beliebiges Gitter der Folge (Th) und es seien uh, ϕh ∈ H10(Th) beliebig,
dann gilt
ah(uh, ϕh) =∑T∈Th
ˆT
∇uh · ∇ϕh
=∑T∈Th
〈∇uh,∇ϕh〉L2(T )
(∗)≤
∑T∈Th
‖∇uh‖L2(T ) · ‖∇ϕh‖L2(T )
=∑T∈Th
|uh|H1(T ) · |ϕh|H1(T )
(∗)≤
( ∑T∈Th
|uh|2H1(T )
) 12 ·
( ∑T∈Th
|ϕh|2H1(T )
) 12
= |uh|1,h · |ϕh|1,h,
d.h. ah ist gleichgradig stetig in der | · |1,h-Norm. Hierbei wurde in (∗) die Cauchy-Schwarz-Ungleichung verwendet: Beim ersten Mal mit dem L2-Skalar-Produkt und beim zweiten Malfür das euklidische Skalar-Produkt, um die Summe aufzubrechen.Desweiteren ist
ah(uh, uh) =∑T∈Th
ˆT
∇uh · ∇uh =∑T∈Th
|uh|2H1(T ) = |uh|21,h,
also ist ah gleichgradig koerziv in der | · |1,h-Norm. �
Wir haben nun alle nötigen Vorarbeiten geleistet, um das Berger-Scott-Strang-Lemma zuformulieren, welches in der hier vogestellten Version eine an unsere Bedürfnisse angepassteAbwandlung von [3, Lemma III.1.2] darstellt.
Lemma 5.1.6: Berger-Scott-StrangEs sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei (Th) eine Gitter-Folge auf Ω. Es sei ah :
H10(Th) × H1
0(Th) → R eine Folge von gleichgradig stetigen und koerziven Bilinearformenund es sei bh : H1
0(Th)→ R eine Folge von stetigen Linearformen. Ferner sei für jedes Gitter

5.1. DAS BERGER-SCOTT-STRANG-LEMMA 49
der Folge ein Teilraum Sh ⊂ H10(Th) gegeben und es seien uh ∈ Sh die nach Theorem 2.1.3
eindeutig bestimmten Lösungen der Gleichung
ah(uh, ϕh) = bh(ϕh) ∀ϕh ∈ Sh, (5.14)
dann existiert ein 0 < c = c(ah) �= c(h,Sh, uh, bh), so dass für jedes u ∈ H10(Ω) auf jedem
Gitter Th der Folge die Abschätzung
|u− uh|1,h ≤ c ·(
infvh∈Sh
|u− vh|1,h + κh(u))
(5.15)
gilt, wobei κh(u) den Konsistenz-Fehler bezeichnet, welcher durch
κh(u) := sup{|ah(u,wh)− bh(wh)|
∣∣∣ wh ∈ Sh : |wh|1,h = 1}
(5.16)
gegeben ist.
Bevor wir den Satz beweisen, wollen wir uns die Details einmal genauer anschauen. DieVoraussetzungen des Satzes entsprechen im Wesentlichen denen des Céa-Lemmas, wobei wirnun eine Folge von Gleichungen des Typs (5.14) betrachten. Insbesondere genügt es, dassSh ⊂ H1
0(Th) gilt – wir kommen also ohne die für das Céa-Lemma notwendige ForderungSh ⊂ H1
0(Ω) aus. Die Abschätzung aus (5.15) enthält den bereits aus dem Céa-Lemmabekannten Diskretisierungs-Fehler, wobei wir noch zusätzlich den Konsistenz-Fehler κh(u)erhalten. Besonders interessant ist jedoch die Tatsache, dass die Abschätzung aus (5.15) nunfür jedes u ∈ H1
0(Ω) gilt – und nicht nur für die Lösung u einer bestimmten Gleichung.
Wir wollen uns vergewissern, dass wir mit dem Berger-Scott-Strang-Lemma tatsächlich ei-ne Verallgemeinerung des Céa-Lemmas formuliert haben. Setzen wir also zusätzlich voraus,dass Sh ⊂ H1
0(Ω) gilt, und betrachten die Lösung u ∈ H10(Ω) der Gleichung (5.6), so bekom-
men wir aus dem Céa-Lemma genau die Abschätzung aus (5.15) – jedoch ohne den Termκh(u). Betrachten wir diesen näher, so sehen wir, dass dieser tatsächlich Null ist, denn aus
a(u, ϕ) = ah(u, ϕ) ∀ϕ ∈ H10(Ω)
b(ϕ) = bh(ϕ) ∀ϕ ∈ H10(Ω)
folgt für ein beliebiges wh ∈ Sh ⊂ H10(Ω) unmittelbar
ah(u,wh)− bh(wh) = a(u,wh)− b(wh) = 0
und somit letztendlich κh(u) = 0.
Beweis von Lemma 5.1.6.Es sei u ∈ H1
0(Ω) ⊂ H10(Th) beliebig aber fest.
Sei Th ein beliebiges Gitter der Folge und es sei uh ∈ Sh die Lösung der Gleichung (5.14).Sei nun vh ∈ Sh beliebig, dann gilt für wh := vh − uh ∈ Sh
|ah(wh, wh)| = |ah(vh − uh, wh)|= |ah(vh, wh)− ah(uh, wh)|= |ah(vh, wh)− bh(wh)|= |ah(vh − u+ u,wh)− bh(wh)|= |ah(vh − u,wh) + ah(u,wh)− bh(wh)|≤ |ah(vh − u,wh)|+ |ah(u,wh)− bh(wh)| (∗)
Aufgrund der gleichgradigen Koerzivität von ah existiert ein 0 < c1 �= c1(h), so dass
|ah(wh, wh)| ≥ c1 · |wh|21,h,

50 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
und mit der gleichgradigen Stetigkeit von ah folgt für ein 0 < c2 �= c2(h) gerade
|ah(vh − u,wh)| ≤ c2 · |u− vh|1,h · |wh|1,h.
Einsetzen in (∗) ergibt die Ungleichung
c1 · |wh|21,h ≤ c2 · |u− vh|1,h · |wh|1,h + |ah(u,wh)− bh(wh)|.
Wir setzen c := max{1, c2} · c−11 und durch Kürzen von |wh|1,h erhalten wir
|wh|1,h ≤ c ·(|u− vh|1,h +
|ah(u,wh)− bh(wh)||wh|1,h
).
Nun gilt nach der Dreiecks-Ungleichung
|u− uh|1,h = |u − vh + vh − uh|1,h ≤ |u− vh|1,h + |vh − uh|1,h,
und da vh − uh = wh erhalten wir insgesamt
|u− uh|1,h ≤ 2 · c ·(|u− vh|1,h +
|ah(u,wh)− bh(wh)||wh|1,h
).
Da vh ∈ Sh beliebig war, können wir den ersten Term durch das Infimum ersetzen undschätzen den zweiten Term durch das Supremum aller wh ∈ Sh ab:
|u− uh|1,h ≤ 2 · c ·(
infvh∈Sh
|u− vh|1,h + supwh∈Sh
|ah(u,wh)− bh(wh)||wh|1,h
).
Da der Ausdruck ah(u,wh)−bh(wh) linear in wh ist, können wir uns auf den Fall |wh|1,h = 1beschränken und erhalten somit die Behauptung. �
Unser Ziel für den Rest dieses Kapitels wird darin bestehen, zu zeigen, dass wir untergewissen Voraussetzungen an Th und Sh eine von der Gitterweite h unabhängige Konstantec > 0 finden können, so dass für die Lösungen uh ∈ Sh von (5.11) der Fehler zur exaktenLösung u ∈ H1
0(Ω) ∩Hk+1(Ω) von (5.6) die Abschätzung
|u− uh|1,h ≤ c · hk · |u|k+1,h
erfüllt. Diese Abschätzung liefert uns eine einfache aber sehr wichtige Aussage:
uhh↘0−−−→ u,
d.h. wir können die exakte Lösung u einer partiellen Differentialgleichung beliebig genauapproximieren, obwohl die uh nicht notwendigerweise in H1
0(Ω) liegen müssen. Das Berger-Scott-Strang-Lemma erlaubt es uns hierbei, den Diskretisierungs-Fehler
infvh∈Sh
|u− vh|1,h
und den Konsistenz-Fehler κh(u) unabhängig voneinander zu analysieren.
5.2 Das Bramble-Hilbert-LemmaDas Herz-Stück einer jeden Fehler-Analyse für die Finite-Elemente-Methode ist das Bram-ble-Hilbert-Lemma. Wir wollen das Lemma in diesem Abschnitt – im Gegensatz zur ur-sprünglichen von Bramble und Hilbert in [17] vorgestellten Version – konstruktiv aus einerfundamentalen Ungleichung herleiten. Dies wird uns so einen besseren Einblick über dieZusammensetzung der auftretenden Konstanten geben, was später von maßgeblicher Bedeu-tung sein wird. Wir wollen uns hierbei auf den Spezialfall konvexer Gebiete beschränken,werden uns aber abschließend überlegen, ob, und wenn ja, wie das Lemma auch für allge-meinere Gebiete formuliert werden kann.
Im Kern des Bramble-Hilbert-Lemmas steckt eine nahe Verwandte der Friedrichs-Unglei-chung, welche wir bereits in Satz 2.2.8 gesehen haben: die Poincaré-Ungleichung.

5.2. DAS BRAMBLE-HILBERT-LEMMA 51
Satz 5.2.1: Poincaré-UngleichungEs sei Ω ⊂ R
n ein zusammenhängendes Lipschitz-Gebiet. Es existiert ein 0 < c = c(Ω, n),so dass für jedes u ∈ H1(Ω) mit
´Ω u = 0 gilt:
|u|H0(Ω) ≤ c · |u|H1(Ω). (5.17)
Ist Ω konvex, so ist c = π−1 · diam(Ω) hinreichend.
Beweis.Für allgemeines Ω vgl. [6, Abschnitt 5.8.1], für den Fall konvexer Gebiete siehe [16]. �
Wir wollen nun zwei Korollare aus der Poincaré-Ungleichung herleiten, welche die Abschät-zung (5.17) verallgemeinern.
Korollar 5.2.2Es sei Ω ⊂ R
n ein zusammenhängendes Lipschitz-Gebiet, und es sei k ∈ N. Es existiert ein0 < c = c(Ω, n, k), so dass für jedes u ∈ Hk+1(Ω), welches für alle α ∈ N
n0 mit |α| = k die
Bedingung´ΩDαu = 0 erfüllt, die folgende Ungleichung gilt:
|u|Hk(Ω) ≤ c · |u|Hk+1(Ω) (5.18)
Ist Ω konvex, so ist c = c′ · diam(Ω), wobei c′ = c′(n, k) �= c′(Ω).
Beweis.Sei k ∈ N und u ∈ Hk+1(Ω) wie gefordert. Nach Definition der Hk-Halbnorm ist
|u|2Hk(Ω) =∑|α|=k
|Dαu|2H0(Ω). (∗)
Betrachten wir nun jeden Summanden einzeln, so können wir wegen´ΩDαu = 0 die
Poincaré-Ungleichung anwenden
|Dαu|2H0(Ω) ≤ c2 · |Dαu|2H1(Ω)
= c2 ·∑|β|=1
|DβDαu|2H0(Ω)
= c2 ·∑|β|=1
|Dα+βu|2H0(Ω).
Nun ist |α+ β| = |α|+ |β| = k + 1 und wegen∑|β|=1
|Dα+βu|2H0(Ω) ≤∑
|γ|=k+1
|Dγu|2H0 = |u|2Hk+1(Ω)
erhalten wir|Dαu|2H0 ≤ c2 · |u|2Hk+1(Ω).
Einsetzen in (∗) ergibt nun
|u|2Hk(Ω) ≤ c2 ·∑|α|=k
|u|2Hk+1(Ω),
und mit ck := card{α ∈ N
n0
∣∣ |α| = k}
erhalten wir letztendlich
|u|2Hk(Ω) ≤ c2 · ck · |u|2Hk+1(Ω).
Ist Ω konvex, so ist nach vorherigem Satz c = diam(Ω) · π−1 hinreichend und wir setzenc′ :=
√ck · π−1. �

52 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
Im folgenden zweiten Korollar wollen wir die nun wenig überraschende Aussage zeigen, dasswir die Poincaré-Ungleichung auch mehrmals anwenden können. Wir wollen uns ab jetzt aberauf den Fall konvexer Gebiete beschränken, um die Konstante – und damit insbesondere diePotenz des Faktors h – besser zu erkennen.
Korollar 5.2.3Es sei Ω ⊂ R
n ein konvexes Lipschitz-Gebiet mit h := diam(Ω), und es seien k,m ∈ N0 mitm ≤ k. Es existiert ein 0 < c = c(n,m, k) �= c(Ω), so dass für jedes u ∈ Hk+1(Ω), welches füralle α ∈ N
n0 mit m ≤ |α| ≤ k die Bedingung
´ΩD
αu = 0 erfüllt, die folgende Ungleichunggilt:
|u|Hm(Ω) ≤ c · hk−m+1 · |u|Hk+1(Ω). (5.19)
Beweis.Da jede konvexe Menge auch zusammenhängend ist, können wir Korollar 5.2.2 insgesamt(k −m+ 1)-mal anwenden und setzen dabei c als das Produkt aller c′. �
Das vorangegangene Korollar bietet uns eine Norm-Abschätzung für Funktionen u ∈ Hk+1(Ω),deren Integral über die Ableitungen von u auf Ω verschwindet. Wir wollen nun zeigen, dasswir für jedes u ∈ Hk+1(Ω) ein Polynom p vom Grad k konstruieren können, so dass u − pdiese Voraussetzung erfüllt. Der nachfolgende Satz ist aus [9, Theorem 3.6.10] entnommenund wird ebenfalls im Paper [17] von Bramble und Hilbert verwendet. Da der Autor Morreyjedoch lediglich „this is easily proved by induction“ als Beweis angibt, wollen wir den Satzhier nachweisen.
Satz 5.2.4Es sei Ω ⊂ R
n ein Lipschitz-Gebiet, und ferner sei k ∈ N0. Für jedes u ∈ Hk+1(Ω) existiertein p ∈ Pn
k , so dass ˆΩ
Dα(u − p) = 0 (5.20)
für alle α ∈ Nn0 mit |α| ≤ k.
Beweis.Wir definieren zunächst für α, β ∈ N
n0
θαβ :=
ˆΩ
Dαxβ dx. (∗)
Hierbei gilt
θαβ = 0 ∀ |α| > |β| (∗∗)θαβ = 0 ∀ |α| = |β|, α �= β (†)
θαα =|Ω|α!
(††)
Für ein gegebenes u ∈ Hk+1(Ω) betrachten wir nun das Polynom p ∈ Pnk in der Gestalt
p(x) :=∑|β|≤k
aβ · xβ ,
wobei die Koeffizienten aβ ∈ R durch die (in |β| absteigende) Rekursionformel
aβ :=β!
|Ω|( ˆ
Ω
Dβu(x) dx−∑
|β|<|γ|≤k
aγ · θβγ)
(‡)

5.2. DAS BRAMBLE-HILBERT-LEMMA 53
gegeben sind. Sei nun α ∈ Nn0 mit |α| ≤ k beliebig, dann giltˆ
Ω
Dαp(x) dx =
ˆΩ
Dα( ∑
|β|≤k
aβ · xβ)dx
=∑|β|≤k
aβ ·ˆΩ
Dαxβ dx
(∗)=
∑|β|≤k
aβ · θαβ
(∗∗)=
∑|α|≤|β|≤k
aβ · θαβ
(†)= aα · θαα +
∑|α|<|β|≤k
aβ · θαβ
(††)= aα ·
|Ω|α!
+∑
|α|<|β|≤k
aβ · θαβ
(‡)=
ˆΩ
Dαu(x) dx−∑
|α|<|γ|≤k
aγ · θαγ +∑
|α|<|β|≤k
aβ · θαβ
=
ˆΩ
Dαu(x) dx.
�
Nun ist es uns endlich möglich, das Bramble-Hilbert-Lemma, welches ein nützliches Hilfs-mittel zur Abschätzung von linearen Operatoren darstellt, zu formulieren und dieses insbe-sondere auch zu beweisen.
Lemma 5.2.5: Bramble-HilbertEs sei Ω ⊂ R
n ein konvexes Lipschitz-Gebiet mit h := diam(Ω), und es seien k,m ∈ N0 mitm ≤ k. Ferner sei X ein Vektor-Raum mit einer (Halb-)Norm |·|X und es sei � : Hm(Ω)→ Xlinear, so dass
∀p ∈ Pnk : |�(p)|X = 0. (5.21)
Falls ein c > 0 existiert, so dass für jedes u ∈ Hk+1(Ω)
|�(u)|X ≤ c · |u|Hm(Ω), (5.22)
dann existiert ein 0 < c′ = c′(n,m, k) �= c′(Ω, X, �), so dass für jedes u ∈ Hk+1(Ω) dieAbschätzung
|�(u)|X ≤ c · c′ · hk−m+1 · |u|Hk+1(Ω) (5.23)
gilt.
Beweis.Sei u ∈ Hk+1(Ω) beliebig und es sei p ∈ Pn
k das Polynom aus Satz 5.2.4, dann gilt
|�(u)|X = |�(u− p+ p)|X= |�(u− p) + �(p)|X≤ |�(u− p)|X + |�(p)|X
(5.21)= |�(u− p)|X
(5.22)≤ c · |u− p|Hm(Ω)
(5.19)≤ c · c′ · hk−m+1 · |u− p|Hk+1(Ω).

54 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
Wegen p ∈ Pnk ist Dαp = 0 für |α| = k + 1 und deswegen folgt
|u− p|Hk+1(Ω) = |u|Hk+1(Ω)
und somit die Behauptung. �
Wir wollen uns nun den Term c′ · hk−m+1 in (5.23) noch einmal genauer anschauen. DerUrsprung dieses Terms ist die Anwendung von Korollar 5.2.3 und dieses bezieht seineKonstante wiederum aus dem Produkt der Konstanten in Korollar 5.2.2. Die Konstantein Korollar 5.2.2 entspricht gerade dem Produkt der Konstante in Satz 5.2.1 und ei-nem Kardinalitäts-Term, welcher aber nur von n,m und k abhängt. Fassen wir dies nunzusammen, so stellen wir fest, dass der Term c′ ·hk−m+1 – modulo eines Vorfaktors, welchernur von n,m, k abhängt – gerade der (k − m + 1)-fachen Potenz der Konstante c aus derPoincaré-Ungleichung (5.17) entspricht. Dies hat nun eine wichtige Konsequenz: Können wirfür eine Klasse von Gebieten {Ω} – in unserem Falle die Klasse der konvexen Gebiete – dieKonstante der Poincaré-Ungleichung durch c · h abschätzen, wobei c nicht von Ω abhängt,so erhalten wir für diese Klasse an Gebieten automatisch das Bramble-Hilbert-Lemma.
5.3 Der Diskretisierungs-FehlerWir widmen uns nun dem Diskretisierungs-Fehler und wollen zeigen, dass unter gewissenVoraussetzungen, welche wir in diesem Abschnitt erarbeiten werden, für eine von der Git-terweite h unabhängige Konstante c > 0 die Abschätzung
infvh∈Sh
|u− vh|1,h ≤ c · hk · |u|k+1,h (5.24)
gilt. Offensichtlich genügt es dafür, die Abschätzung für ein bestimmtes vh ∈ Sh zu zeigen.Wir wollen nun einen Operator definieren, welcher uns für ein gegebenes u ∈ Hk+1(Ω) eingeeignetes vh ∈ Sh liefern wird, wobei es wenig verwunderlich ist, dass wir die gewünschteAbschätzung (5.24) durch die Anwendung des Bramble-Hilbert-Lemmas auf eben diesenOperator erhalten werden.
Definition 5.3.1: ProjektorSei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei Th ein Gitter auf Ω. Ferner sei Sh ein unisolventerAnsatz-Raum auf Th, dessen Knotenfunktionale N1, . . . ,Nm für H1(Ω)-Funktionen definiertsind, d.h. es gelte ∀ i ∈ {1, . . . ,m}
Ni : H1(Ω)→ R, linear.
Sei ϕ1, . . . , ϕm die durch die Knotenfunktionale N1, . . . ,Nm induzierte Basis von Sh, d.h. esgelte
∀ i, j ∈ {1, . . . ,m} : Ni(ϕj) = δji ,
dann definieren wir den Projektor Πh von Sh über
Πh : H1(Ω)→ Sh
u �→m∑i=1
Ni(u) · ϕi. (5.25)
Wir haben in der vorangegangenen Definition eine wichtige Forderung an den Ansatz-RaumSh gestellt: Die Knotenfunktionale Ni sollen auf H1(Ω)-Funktionen anwendbar sein. Diesstellt tatsächlich eine Einschränkung dar, denn diese Voraussetzung wird von vielen Ansatz-Räumen verletzt. Ein Beispiel dafür ist der P1(Th), welchen wir in Abschnitt 3.3 unter-sucht haben, denn die punktweise Auswertung ist für H1(Ω)-Funktionen nicht definiert.
Wir wollen für die nächsten beiden Sätze stillschweigend voraussetzen, dass die Knotenfunk-tionale des Ansatz-Raumes Sh auf H1(Ω)-Funktionen anwendbar sind, und werden später,

5.3. DER DISKRETISIERUNGS-FEHLER 55
wenn wir uns auf den Fall parametrischer Familien einschränken, hinreichende Bedingungenfür diese Forderung ausarbeiten.
Satz 5.3.2Sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei Th ein Gitter auf Ω. Ferner sei Sh ein unisolventerAnsatz-Raum vom Grad k ∈ N auf Th, dann gilt
∀p ∈ Pnk : Πh(p) = p. (5.26)
Beweis.Sei p ∈ Pn
k beliebig aber fest.Sei nun T ∈ Th beliebig, dann ist
Πh(p)|T =
m∑j=1
Nj(p) · ϕj |T
=∑
j∈I(T )
Nj(p) · ϕj |T , (∗)
da jedes ϕj mit j /∈ I(T ) auf ganz T konstant Null ist.Da Sh vom Grad k ist, gilt nach Definition Pn
k ⊆ ST , und somit p|T ∈ ST . Nun bilden alleϕi|T mit i ∈ I(T ) eine Basis von ST , d.h. es existieren Koeffizienten ai ∈ R, so dass
p|T =∑
i∈I(T )
ai · ϕi|T (∗∗)
und wir erhalten
Πh(p)|T =m∑j=1
Nj(p) · ϕj |T
(∗)=
∑j∈I(T )
Nj(p) · ϕj |T
(∗∗)=
∑j∈I(T )
Nj
( ∑i∈I(T )
ai · ϕi|T)· ϕj |T
=∑
j∈I(T )
( ∑i∈I(T )
ai · Nj(ϕi|T ))· ϕj |T
(3.32)=
∑j∈I(T )
( ∑i∈I(T )
ai · δji)· ϕj |T
=∑
j∈I(T )
aj · ϕj |T
(∗∗)= p|T ,
und, da T ∈ Th beliebig war, gilt Πh(p) = p fast überall. �
Mit Hilfe des Projektors und des Bramble-Hilbert-Lemmas können wir nun den folgendenSatz formulieren, welcher uns hinreichende Bedingungen für unsere gewünschte Abschätzung(5.24) liefern wird.
Satz 5.3.3: Approximations-SatzSei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei (Th) eine Gitter-Folge auf Ω, deren ZellenT ∈ (Th) alle konvex sind. Ferner sei (Sh) eine Folge von Ansatz-Räumen vom Grad k ∈ N
56 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
auf (Th). Falls eine von der Gitterweite h unabhängige Konstante c > 0 existiert, so dass fürjeden Ansatz-Raum Sh der Folge (Sh) auf jeder Zelle T ∈ Th die Abschätzung
|u−Πh(u)|H1(T ) ≤ c · |u|H1(T ) (5.27)
für jedes u ∈ H1(Ω) gilt, dann existiert eine Konstante 0 < c′ = c′(n, k) �= c′(T, h,Πh), sodass für jedes u ∈ Hk+1(Ω) die Abschätzung
|u−Πh(u)|1,h ≤ c · c′ · hk · |u|k+1,h (5.28)
gilt.
Beweis.Sei Th ein Gitter aus der Folge (Th) und sei T ∈ (Th) beliebig. Wir wollen das Bramble-Hilbert-Lemma auf der Zelle T anwenden und setzen dazu
X := H1(T ),
| · |X := | · |H1(T ),
� := id−Πh,
dann gilt
|�(u)|H1(T ) = |u−Πh(u)|H1(T )
(5.27)≤ c · |u|H1(T ).
Nach Voraussetzung ist Sh vom Grad k, d.h. nach Satz 5.3.2 gilt Πh(p) = p und somit�(p) = 0 für alle p ∈ Pn
k . Das Bramble-Hilbert-Lemma liefert nun
|u−Πh(u)|H1(T ) ≤ c · c′ · diam(T )k · |u|Hk+1(T )
≤ c · c′ · hk · |u|Hk+1(T ), (∗)
wobei c′ = c′(n, k) �= c′(T, h,Πh) und nach Voraussetzung auch c �= c(h). Es folgt
|u−Πh(u)|21,h =∑T∈Th
|u−Πh(u)|2H1(T )
(∗)≤
∑T∈Th
(c · c′ · hk
)2 · |u|2Hk+1(T )
=(c · c′ · hk
)2 · ∑T∈Th
|u|2Hk+1(T )
=(c · c′ · hk
)2 · |u|2k+1,h,
und durch Ziehen der Wurzel folgt die Behauptung. �
Wir haben nun die Abschätzung des Diskretisierungs-Fehlers für einen unisolventen Ansatz-Raum Sh vom Grad k ∈ N auf zwei Eigenschaften des Projektors Πh reduziert: Er muss zumEinen auf H1(Ω)-Funktionen anwendbar sein und zum Anderen auf jeder Zelle T ∈ Th dieAbschätzung (5.27) erfüllen. Die erste Forderung setzt voraus, dass die Knotenfunktionaleauf H1(Ω)-Funktionen anwendbar sind, und dies lässt sich einfach anhand ihrer Definitionüberprüfen. Die zweite Forderung birgt das eigentliche Problem: Zwar lässt sich die Existenzeines c > 0 oft auf abstrakten Wege – beispielsweise mit Satz 2.2.5 – einfach nachweisen,allerdings bleibt auf diesem Wege unklar, wie c von der Zelle T abhängt. Insbesondere stelltsich die Frage, ob die „Konstante“ c für h↘ 0 beschränkt bleibt oder ob sie unter Umstän-den unkontrolliert anwächst, was uns die Abschätzung (5.28) zunichte machen würde.
Glücklicherweise können wir zumindest für eine parametrische Familie (Sh) hinreichendeVoraussetzungen finden, welche uns einerseits die Anwendbarkeit von Πh auf H1(Ω)-Funk-tionen als auch die Existenz einer von h unabhängigen Konstante c > 0 für die Abschätzung

5.3. DER DISKRETISIERUNGS-FEHLER 57
(5.27) garantieren werden. Das Besondere an parametrischen Ansatz-Räumen Sh ist ge-rade, dass wir die Konstruktion der Basisfunktionen ϕj von Sh mit Hilfe von Referenz-Knotenfunktionalen Ni auf eine Referenz-Basis ϕi von S zurückführen können, daher ist esnaheliegend, in Analogie zu Definition 5.3.1 auch einen Referenz-Projektor zu definieren.Im gleichen Schritt wollen wir auch den Zusammenhang zwischen dem Referenz-ProjektorΠ und dem Projektor Πh untersuchen.
Satz 5.3.4Sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei (Th) eine Gitter-Folge auf Ω, so dass für jede ZelleT ∈ (Th) die Transformation FT : T → T ein C1-Diffeomorphismus ist. Ferner sei (Sh) eineparametrische Familie auf (Th), deren Referenz-Knotenfunktionale N1, . . . , Nl im Dualraumvon H1(T ) liegen, d.h. es sei ∀ i ∈ {1, . . . , l}
Ni : H1(T )→ R, linear und stetig,
dann sind die Knotenfunktionale N1, . . . ,Nm von Sh auf H1(Ω) definiert.Ist ϕ1, . . . , ϕl die durch die Referenz-Knotenfunktionale N1, . . . , Nl induzierte Basis von S,dann gilt für den Referenz-Projektor Π von Sh
Π : H1(T )→ S ⊂ H1(T )
u �→l∑
i=1
Ni(u) · ϕi (5.29)
für jedes u ∈ H1(Ω) auf jeder Zelle T ∈ Th
Πh(u)|T = Π(u ◦ FT ) ◦ F−1T . (5.30)
Beweis.Sei u ∈ H1(Ω) beliebig aber fest.Wir wollen uns zunächst vergewissern, dass die Knotenfunktionale von Sh bereits für H1(Ω)-Funktionen definiert sind. Sei also T ∈ (Th) eine beliebige Zelle der Gitter-Folge, sei für i ∈I(T ) beliebig Ni ein Knotenfunktional von Sh, dann gibt es ein Referenz-KnotenfunktionalNj , so dass
Ni(u)(3.37)= Nj(u ◦ FT ).
Nun ist u|T ∈ H1(T ) und nach Satz 2.3.2 gilt (u ◦ FT ) ∈ H1(T ), somit ist Nj nachVoraussetzung auf u ◦ FT anwendbar – und damit ist Ni für u ∈ H1(Ω) definiert.O.B.d.A. sei nun I(T ) = {1, . . . , l}, ansonsten nummeriere man die Knotenfunktionale um,dann gilt desweiteren
Πh(u)|T(5.25)=
m∑i=1
Ni(u) · ϕi|T
(3.37)=
l∑i=1
Ni(u ◦ FT ) · ϕi|T
(3.40)=
l∑i=1
Ni(u ◦ FT ) ·(ϕi ◦ F−1
T
)=
( l∑i=1
Ni(u ◦ FT ) · ϕi
)◦ F−1
T
(5.29)= Π(u ◦ FT ) ◦ F−1
T .
�
58 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
Wir wollen nun zeigen, dass wir für den Referenz-Projektor Π einer parametrischen Familie(Sh) eine Abschätzung in der H1-Halbnorm erhalten, wie sie von Satz 5.3.3 gefordert wird.
Satz 5.3.5Sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei (Th) eine Gitter-Folge auf Ω. Ferner sei (Sh) eineparametrische Familie auf (Th), deren Referenz-Knotenfunktionale N1, . . . , Nl im Dualraumvon H1(T ) liegen, dann existiert ein 0 < c = c(T , Π), so dass für jedes u ∈ H1(T ) dieAbschätzung
|u− Π(u)|H1(T ) ≤ c · |u|H1(T ) (5.31)
gilt.
Beweis.Sei u ∈ H1(T ) beliebig aber fest. Da die Referenz-Knotenfunktionale als linear und stetigvorausgesetzt sind, existiert für jedes Ni nach Satz 2.2.5 ein ci > 0, so dass
|Ni(u)| ≤ ci · ‖u‖H1(T ), (∗)
und wir erhalten
|Π(u)|H1(T ) =∣∣ l∑i=1
Ni(u) · ϕi
∣∣H1(T )
≤l∑
i=1
|Ni(u) · ϕi|H1(T )
=
l∑i=1
|Ni(u)| · |ϕi|H1(T )
(∗)≤
l∑i=1
ci · ‖u‖H1(T ) · |ϕi|H1(T )
= ‖u‖H1(T ) ·l∑
i=1
ci · |ϕi|H1(T ). (∗∗)
Wir setzen nun
c :=
n∑i=1
ci · |ϕi|H1(T ),
dann gilt
|u− Π(u)|H1(T ) ≤ |u|H1(T ) + |Π(u)|H1(T )
≤ ‖u‖H1(T ) + |Π(u)|H1(T )
(∗∗)≤ ‖u‖H1(T ) + c · ‖u‖H1(T )
= (1 + c) · ‖u‖H1(T ). (†)
Wir setzenγ :=
1
|T |
ˆT
u,
dann ist
|u− Π(u)|H1(T ) = |u− γ − Π(u) + γ|H1(T )
= |u− γ − Π(u− γ)|H1(T )
(†)≤ (1 + c) · ‖u− γ‖H1(T ). (††)

5.3. DER DISKRETISIERUNGS-FEHLER 59
Nach Konstruktion von γ gilt ˆT
u− γ = 0,
und wir können die Poincaré-Ungleichung aus Satz 5.2.1 anwenden:
‖u− γ‖2H1(T )= |u− γ|2H0(T )
+ |u− γ|2H1(T )
≤ c′ · |u− γ|2H1(T )
≤ c′ · |u|2H1(T ), (‡)
und wir erhalten letztendlich
|u− Π(u)|H1(T )
(††)≤ (1 + c) · ‖u− γ‖H1(T )
(‡)≤ (1 + c) ·
√c′ · |u|H1(T ).
�
Mit dem Referenz-Projektor Π sowie dem vorangegangen Satz können wir uns nun wiederdem Diskretisierungs-Fehler widmen, oder genauer gesagt der vorausgesetzten Abschätzung(5.27) von Satz 5.3.3, welche wir nun für eine parametrische Familie (Sh) auf zwei Ab-schätzungen für die Transformation FT : T → T zurückführen wollen.
Satz 5.3.6Sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei (Th) eine Gitter-Folge auf Ω, deren Zellen T ∈ (Th)alle konvex sind. Ferner sei (Sh) eine parametrische Familie vom Grad k ∈ N auf (Th), derenReferenz-Knotenfunktionale N1, . . . , Nl im Dualraum von H1(T ) liegen. Falls eine von derGitterweite h unabhängige Konstante c > 0 existiert, so dass für jede Zelle T ∈ (Th) dieTransformation FT : T → T ein C1-Diffeomorphismus ist und für ein 0 < τ = τ(n, T ) dieAbschätzungen
|u ◦ FT |H1(T ) ≤ c · τ · |u|H1(T ) (5.32)
|u ◦ F−1T |H1(T ) ≤ c · τ−1 · |u|H1(T ) (5.33)
für alle u ∈ H1(T ), u ∈ H1(T ) gelten, dann gilt für jedes u ∈ H1(Ω) auf jeder Zelle T ∈ (Th)die Abschätzung
|u −Πh(u)|H1(T ) ≤ c2 · c · |u|H1(T ), (5.34)
wobei c lediglich vom Referenz-Projektor Π abhängt.
Beweis.Seien T ∈ Th und u ∈ H1(T ) beliebig, dann gilt mit u := u ◦ FT
|u−Πh(u)|H1(T ) = |u ◦ F−1T −Πh(u ◦ F−1
T )|H1(T )
(5.30)= |u ◦ F−1
T − Π(u) ◦ F−1T |H1(T )
= |(u− Π(u)
)◦ F−1
T |H1(T )
(5.33)≤ c · τ−1 · |u− Π(u)|H1(T )
(5.31)≤ c · τ−1 · c · |u|H1(T )
= c · τ−1 · c · |u ◦ FT |H1(T )
(5.32)≤ c · τ−1 · c · c · τ · |u|H1(T )
= c2 · c · |u|H1(T ). �

60 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
Mit dem eben gezeigten Satz haben wir die zellweise Beschränktheit des Projektors Πh füreine parametrische Familie (Sh) auf die Beschränktheit der Transformation FT : T → T zu-rückgeführt. Diese Forderung ist zwar nun von dem eigentlichen Ansatz-Raum Sh losgelöst,dennoch müssen wir wieder die Existenz einer Konstante c nachweisen, welche nicht von derGitterweite h abhängen darf.
Satz 5.3.7: Beschränktheit der TransformationSei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei (Th) eine Gitter-Folge auf Ω, so dass für jedesT ∈ (Th) die Transformation FT : T → T ein C1-Diffeomorphismus ist. Falls zwei derGitterweite h unabhängige Konstanten c0, c1 > 0 existieren, so dass für jedes T ∈ (Th) miteinem 0 < μ = μ(n, T )
∀ x ∈ T : c−10 · μ−1 ≤ JF (x) ≤ c0 · μ−1 (5.35)
und darüber hinaus mit einer zur euklidischen Vektor-Norm ‖ · ‖2 verträglichen Matrix-Norm||| · ||| für jedes T ∈ (Th) mit einem 0 < ν = ν(n, T )
supx∈T
||| DF�T (x)||| ≤ c1 · ν (5.36)
supx∈T
|||(DF−1
T
)�(x)||| ≤ c1 · ν−1 (5.37)
gilt, so gelten die Abschätzungen (5.32) und (5.33) mit c := c1 ·√c0 und τ = ν · √μ.
Beweis.Sei u ∈ H1(T ) beliebig, dann gilt
|u ◦ FT |2H1(T )=
ˆT
‖∇(u ◦ FT
)(x)‖22 dx
(2.14)=
ˆT
‖DF�T (x) ·
(∇u
)◦(FT (x)
)‖22 dx
(∗)≤ˆT
|||DF�T (x)|||2 · ‖
(∇u
)◦(FT (x)
)‖22 dx
(5.36)≤
(c1 · ν
)2 · ˆT
‖(∇u
)◦(FT (x)
)‖22 dx
(2.17)=
(c1 · ν
)2 · ˆT
JF−1(x) · ‖(∇u
)◦(FT ◦ F−1
T (x))‖22 dx
(2.16)=
(c1 · ν
)2 · ˆT
(JF (x)
)−1 · ‖(∇u
)(x)‖22 dx
(5.35)≤
(c1 · ν
)2 · (c−10 · μ−1
)−1 ·ˆT
‖∇u(x)‖22 dx
= c21 · c0 · ν2 · μ · |u|2H1(T ),
wobei in (∗) die Verträglichkeit der Normen ausgenutzt wurde. Analog folgt
|u ◦ F−1T |2H1(T ) ≤ c21 · c0 · ν−2 · μ−1 · |u|2H1(T )
,
und somit die Abschätzungen (5.32) und (5.33) durch Ziehen der Wurzel mit c = c1 ·√c0
und τ = ν · √μ. �
Wir haben die Beschränkheit der Transformation FT : T → T nun auf eine Analyse derJacobi-Matrix DFT sowie ihrer Determinante JF zurückgeführt, dennoch haben wir bisjetzt dadurch keine „einfach“ nachzuprüfenden Voraussetzungen erhalten. Insbesondere wis-sen wir nicht, unter welchen Bedingungen die Transformation FT für Qn
1 -Würfel ein C1-Diffeomorphismus ist. Es wäre nun wünschenswert, wir könnten hinreichende „geometrische“

5.3. DER DISKRETISIERUNGS-FEHLER 61
Forderungen an die Gitter-Folge (Th) stellen, so dass die Forderungen von Satz 5.3.7 erfülltwerden, und diesem Ziel wollen wir uns nun widmen.
Wir haben in Definition 3.2.8 erklärt, was wir unter einer affin äquivalenten Gitter-Folgeverstehen, und diese Klasse an Gitter-Folgen wollen wir uns nun genauer anschauen.
Satz 5.3.8Sei (Th) eine affin äquivalente Gitter-Folge im R
n. Falls eine von der Gitterweite h unab-hängige Konstante � > 0 existiert, so dass für jedes T ∈ (Th)
� · inf{ε > 0
∣∣ ∃ξ ∈ Rn : T ⊆ Bε(ξ)
}≤ sup
{ε > 0
∣∣ ∃ξ ∈ Rn : Bε(ξ) ⊆ T
}, (5.38)
dann erfüllt (Th) die Voraussetzungen von Satz 5.3.7, wobei die Konstanten c0, c1 > 0 nurvon � und n abhängen1.
Beweis.Sei T ∈ Th beliebig, dann ist das Volumen von T gerade nach Definition
|T | =
ˆT
1 dx
(2.17)=
ˆT
JF (x) ·(1 ◦ FT
)(x) dx
=
ˆT
JF (x) · 1 dx
und, da die Funktional-Determinante JF auf ganz T konstant ist, erhalten wir
= JF ·ˆT
1 dx
= JF · |T |= JF · 2n.
Sei nunσ := inf
{ε > 0
∣∣ ∃ξ ∈ Rn : T ⊆ Bε(ξ)
}= 1
2 · diam(T ),
dann ist T in einem Hyperwürfel mit Kantenlänge 2σ enthalten, also ist
JF = 2−n · |T | ≤ 2−n · (2σ)n = σn.
Desweiteren enthält T nach (5.38) einen Ball vom Radius � · σ, und somit auch einen Hy-perwürfel der Kantenlänge 2σ√
n, also ist
JF = 2−n · |T | ≥ 2−n ·(2�σ√
n
)n
=( �√
n
)n
· σn,
womit wir für c0 :=(√n · �−1
)n und μ := σ−n die Voraussetzung (5.35) nachgewiesenhaben2.Die Transformation FT : T → T ist nach Voraussetzung affin und somit FT ∈ C1. Wir habeneben nachgewiesen, dass die Determinante der Jacobi-Matrix ungleich Null und somit FT
bijektiv ist. Darüber hinaus ist die Umkehrabbildung einer affinen Abbildung selbst wiederaffin, und somit gilt F−1
T ∈ C1 – also ist FT ein C1-Diffeomorphismus.Für die Abschätzungen (5.36) und (5.37) verweisen wir auf [3, Beweis von Satz 6.6]. �
1Eine solche Gitter-Folge wird oft als quasi-uniform bezeichnet (vgl. z.B. [3, Definition II.5.1]).2Durch scharfes Nachdenken erhält man
√n · �−1 ≥ n ≥ 1, womit dieses c0 auch für die obere Schanke
von JF hinreichend ist.

62 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
Wir wollen an dieser Stelle die Ergebnisse der vorangegangen Sätze sammeln, und dabei dienötigen Voraussetzungen an eine parametrische Familie (Sh), welche auf einer affin äquiva-lenten Gitter-Folge (Th) definiert ist, in einer überschaubaren Liste zusammenfassen.
Für eine parametrische Familie (Sh) auf einer affin äquivalenten Gitter-Folge (Th) gilt fürden Diskretisierungs-Fehler für k ∈ N für jedes u ∈ Hk+1(Ω) die Abschätzung
infvh∈Sh
|u− vh|1,h ≤ c · hk · |u|k+1,h
mit einer von der Gitterweite h unabhängigen Konstante c > 0, falls die folgenden Voraus-setzungen erfüllt sind:
1. Die Gitter-Folge (Th) muss die Voraussetzungen von Satz 5.3.8 erfüllen.Dieser impliziert über Satz 5.3.7 die Beschränktheit der Transformation FT und somitdie Voraussetzungen (5.32) und (5.33) von Satz 5.3.6.
2. Die Referenz-Knotenfunktionale N1, . . . , Nl müssen im Dualraum von H1(T ) liegen.Nach Satz 5.3.6 folgt somit die Abschätzung (5.27) von Satz 5.3.3.
3. Der Referenz-Spann S muss den Raum Pnk enthalten.
Dies impliziert nach Korollar 3.4.3, dass Sh vom Grad k ist, und somit liefert Satz5.3.3 letztendlich die Abschätzung des Diskretisierungs-Fehlers.
Wir haben nun die Abschätzung des Diskretisierungs-Fehlers für parametrische Familien aufaffin äquivalenten Gitter-Folgen auf drei Voraussetzungen zurückgeführt. Bedauerlicherwei-se schränkt schon allein die Forderung, dass die Gitter-Folge (Th) affin äquivalent sein soll,die Auswahl der zulässigen Gitter-Folgen stark ein – zumindest wenn wir Qn
1 -Gitter benut-zen möchten. Es ist daher vor allem aus praktischen Gründen wünschenswert, wir könntenschwächere Forderungen an eine Qn
1 -Gitter-Folge (Th) stellen, welche für die Voraussetzun-gen von Satz 5.3.7 hinreichend sind, ohne jedoch die affine Äquivalenz von (Th) zu fordern.Dieser Wunsch lässt sich zumindest für den zwei-dimensionalen Fall erfüllen.
Satz 5.3.9: Ciarlet-RaviartSei (Th) eine Q2
1-Gitter-Folge im R2. Falls zwei von der Gitterweite h unabhängige Konstan-
ten �, γ > 0 existieren, so dass für jedes T ∈ (Th)
1. das Verhältnis der Längen der längsten Kante an T zur kürzesten Kante an T durch� beschränkt ist, d.h.
� · maxE∈E(1)(T )
|E| ≤ minE∈E(1)(T )
|E|,
2. die Innenwinkel an allen Knoten von T durch γ nach unten und durch π−γ nach obenbeschränkt sind1,
dann erfüllt (Th) die Voraussetzungen von Satz 5.3.7, wobei die Konstanten c0, c1 > 0 nurvon � und γ abhängen.
Beweis.vgl. [18, Lemma 8] �
In Analogie zum Fall der affin äquivalenten Gitter-Folgen wollen wir nun auch für Q21-Gitter-
Folgen die hinreichenden Voraussetzungen für die Abschätzung des Diskretisierungs-Fehlersin einer überschaubaren Liste zusammenfassen.
1Dies impliziert unmittelbar, dass alle Zellen T ∈ Th konvex sind.

5.4. DER KONSISTENZ-FEHLER 63
Für eine parametrische Familie (Sh) auf einer Q21-Gitter-Folge (Th) gilt für den Diskreti-
sierungs-Fehler für k ∈ N für jedes u ∈ Hk+1(Ω) die Abschätzung
infvh∈Sh
|u− vh|1,h ≤ c · hk · |u|k+1,h
mit einer von der Gitterweite h unabhängigen Konstante c > 0, falls die folgenden Voraus-setzungen erfüllt sind:
1. Die Gitter-Folge (Th) muss die Voraussetzungen von Satz 5.3.9 erfüllen.Dieser impliziert über Satz 5.3.7 die Beschränktheit der Transformation FT und somitdie Voraussetzungen (5.32) und (5.33) von Satz 5.3.6.
2. Die Referenz-Knotenfunktionale N1, . . . , Nl müssen im Dualraum von H1(T ) liegen.Nach Satz 5.3.6 folgt somit die Abschätzung (5.27) von Satz 5.3.3.
3. Der Referenz-Spann S muss den Raum Qnk enthalten. Dies impliziert nach Korollar
3.4.3, dass Sh vom Grad k ist, und somit liefert Satz 5.3.3 letztendlich die Abschät-zung des Diskretisierungs-Fehlers.
5.4 Der Konsistenz-Fehler
Wir wollen nun den Konsistenz-Fehler
κh(u) = sup{|ah(u, ϕh)− bh(ϕh)|
∣∣∣ ϕh ∈ Sh : |ϕh|1,h = 1}
(5.39)
abschätzen. In Analogie zur Abschätzung des Diskretisierungs-Fehlers wollen wir zeigen,dass unter zusätzlichen Voraussetzungen an Sh ⊂ H1
0(Th), welche wir in diesem Abschnitterarbeiten werden, für eine von der Gitterweite h unabhängige Konstante c > 0 die Abschät-zung
κh(u) ≤ c · hk · |u|k+1,h (5.40)
gilt, und es ist wenig verwunderlich, dass wir dies mit Hilfe des Bramble-Hilbert-Lemmasbewerkstelligen möchten.
Der Konsistenz-Fehler hängt im Gegensatz zum Diskretisierungs-Fehler stark von der Wahlvon ah und bh ab. Da das Berger-Scott-Strang-Lemma darüber hinaus lediglich u ∈ H1
0(Ω)fordert, muss also zwangsläufig bei der Analyse von κh(u) die Tatsache, dass u eine partielleDifferentialgleichung löst, eine wichtige Rolle spielen. Da wir den Konsistenz-Fehler nichtfür beliebige Differentialgleichungen abschätzen können, schränken wir uns bei der Analyseauf den prototypischen Fall der Poisson-Gleichung ein, d.h.
• Für ein f ∈ L2(Ω) sei u ∈ H10(Ω) die Lösung der schwachen Poisson-GleichungˆΩ
∇u · ∇ϕ =
ˆΩ
f · ϕ ∀ϕ ∈ H10(Ω), (5.41)
• Für uh, ϕh ∈ H10(Th) seien
ah(uh, ϕh) :=∑T∈Th
ˆT
∇uh · ∇ϕh, (5.42)
bh(ϕh) :=∑T∈Th
ˆT
f · ϕh. (5.43)
Der Übersichtlichkeit halber wollen wir für diesen Abschnitt einige Abkürzungen verwenden:
1. Für ein T ∈ Th schreiben wir E(T ) für E(n−1)(T ).

64 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
2. Analog schreiben wir Eh für E(n−1)h .
3. Für ein E ∈ Eh definieren wir mit
T (E) :={T ∈ Th
∣∣ E ∈ E(T ) } (5.44)
die Menge aller Zellen T ∈ Th, welche zu der Seitenfläche E adjazent sind.
Wir wollen nun mit der Analyse des Konsistenz-Fehlers beginnen und betrachten dazu zu-nächst den Term |ah(u, ϕh)− bh(ϕh)|, welcher in der Definition (5.39) von κh(u) auftaucht.Der nachfolgende Satz wird uns zeigen, wie genau dieser Term für unser prototypischesProblem zusammengesetzt ist.
Satz 5.4.1Sei u ∈ H1
0(Ω)∩H2(Ω) die Lösung von (5.41), dann gilt für jedes ϕh ∈ H10(Th) die Abschät-
zung ∣∣ah(u, ϕh)− bh(ϕh)∣∣ ≤ ∑
E∈Eh
∣∣∣ ˆE
η · ∇u · [ϕE ]E
∣∣∣, (5.45)
wobei η den Normalen-Vektor von E bezeichnet.
Beweis.Sei ϕh ∈ H1
0(Th) beliebig. Betrachten wir den Term
ah(u, ϕh) =∑T∈Th
ˆT
∇u · ∇ϕh,
so erhalten wir durch partielle Integration zunächst
ah(u, ϕh)(2.19)=
∑T∈Th
( ˆ∂T
η · ∇u · ϕh −ˆT
Δu · ϕh
).
Nun subtrahieren wir bh(ϕh) und erhalten
ah(u, ϕh)− bh(ϕh) =∑T∈Th
( ˆ∂T
η · ∇u · ϕh −ˆT
Δu · ϕh −ˆT
f · ϕh
)=
∑T∈Th
( ˆ∂T
η · ∇u · ϕh −ˆT
(f +Δu) · ϕh
).
Da nach Voraussetzung u ∈ H10(Ω)∩H2(Ω) eine Lösung von (5.41) ist, gilt nach Satz 2.4.7
für jedes ϕh ∈ L2(Ω) ⊃ H10(Th) gerade
ˆT
f · ϕh = −ˆT
Δu · ϕh,
⇐⇒ˆT
(f +Δu
)· ϕh = 0
und wir erhalten somit
ah(u, ϕh)− bh(ϕh) =∑T∈Th
ˆ∂T
η · ∇u · ϕh
=∑T∈Th
∑E∈E(T )
ˆE
η · ∇u · ϕh. (∗)
Schauen wir uns die Summe genauer an, so stellen wir fest, dass jede Rand-Seitenfäche E ∈Eh genau einmal in der Summe vorhanden ist, während jede innere Seitenfläche E ∈ Eh genauzwei mal auftaucht, wobei der Normalen-Vektor η sein Vorzeichen ändert. Diese Beobachtung

5.4. DER KONSISTENZ-FEHLER 65
erlaubt es uns, die Summe aus (∗) mit Hilfe des in Definition 5.1.2 vorgestellten Sprung-Operators darzustellen, wobei wir nun über alle E ∈ Eh aufsummieren:
ah(u, ϕh)− bh(ϕh) =∑E∈Eh
ˆE
η · ∇u · [ϕh]E . (∗∗)
Für den Betrag folgt mit der Dreiecksungleichung die Behauptung. �
Bemerkung: In der Gleichung (∗∗) haben wir formal gesehen ein Vorzeichen-Problem: Daeine Seitenfläche E ∈ Eh kein „Innen“ oder „Außen“ besitzt, ist der Normalen-Vektor η nurbis auf das Vorzeichen eindeutig. Desweiteren haben wir bereits in der Bemerkung zu Defi-nition 5.1.2 festgestellt, dass dies auch für den Sprung [ · ]E der Fall ist. In der Abschätzung(5.45) ist das Problem jedoch gelöst, da das nicht eindeutige Vorzeichen der Summandenaufgrund der Linearität des Integrals ohnehin vom Betrag eliminiert wird.
Wir wollen nun jeden Summanden von (5.45) einzeln betrachten und eine erste einfacheaber für die spätere Analyse sehr wichtige Abschätzung nachweisen.
Satz 5.4.2Es seien u ∈ H2(Ω), ϕh ∈ H1
0(Th) und E ∈ Eh beliebig, dann gilt∣∣∣ ˆE
η · ∇u · [ϕh]E
∣∣∣ ≤ ‖∇u‖L2(E) · ‖[ϕh]E‖L2(E). (5.46)
Beweis.Mit der Cauchy-Schwarz-Ungleichung erhalten wir∣∣∣ ˆ
E
η · ∇u · [ϕh]E
∣∣∣ = ∣∣∣〈η · ∇u, [ϕh]E〉L2(E)
∣∣∣≤ ‖η · ∇u‖L2(E) · ‖[ϕh]E‖L2(E). (∗)
Desweiteren gilt wieder nach der Cauchy-Schwarz-Ungleichung
‖η · ∇u‖2L2(E) =
ˆE
(η · ∇u)2
=
ˆE
〈η,∇u〉22
≤ˆE
‖η‖22 · ‖∇u‖22
und, da nach Definition des Normalen-Vektors ‖η‖2 = 1 gilt, erhalten wir
‖η · ∇u‖2L2(E) ≤ˆE
‖∇u‖22 = ‖∇u‖2L2(E).
Einsetzen in (∗) ergibt die Behauptung. �
Bevor wir mit der Analyse fortfahren können, benötigen wir einen wichtigen Satz zur Norm-Abschätzung des Spur-Operators.
Satz 5.4.3Es sei Ω ein Lipschitz-Gebiet und es sei (Th) eine Gitter-Folge auf Ω, welche die Vorausset-zungen von Satz 5.3.7 erfüllt. Es existiert ein 0 < c �= c(h), so dass für jede Zelle T ∈ (Th)für jedes u ∈ H1(T ) die Abschätzung
‖u‖L2(∂T ) ≤ c · h−12
T · |u|H0(T ) + c · h12
T · |u|H1(T ) (5.47)
mit hT := diam(T ) gilt.

66 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
Beweis.vgl. [13, Beweis von Theorem 4] �
Der vorangegangene Satz wird es uns erlauben, den Term∣∣∣ ˆE
η · ∇u · [ϕh]E
∣∣∣aus (5.45) mit Hilfe des Bramble-Hilbert-Lemmas abzuschätzen. An dieser Stelle müssen wirjedoch eine zusätzliche Forderung an den Raum Sh stellen, welche wir im folgenden Satzanbringen möchten.
Satz 5.4.4Seien die Voraussetzungen von Satz 5.4.3 erfüllt. Ferner sei k ∈ N, so dass für alle E ∈ Ehund alle p ∈ Pn
k ˆE
η · ∇p · [ϕh]E = 0 ∀ϕh ∈ Sh (5.48)
gilt, dann existiert ein 0 < c �= c(h,E, ϕh), so dass für jedes u ∈ Hk+1(Ω) die Abschätzung∣∣∣ ˆE
η · ∇u · [ϕh]E
∣∣∣ ≤ c · hk− 12 ·
( ∑T∈T (E)
|u|Hk+1(T )
)· ‖[ϕh]E‖L2(E) (5.49)
für jedes E ∈ Eh und jedes ϕh ∈ Sh gilt.
Beweis.Sei E ∈ Eh, u ∈ Hk+1(Ω) sowie ϕh ∈ Sh beliebig aber fest.Sei nun T ∈ T (E), dann gilt für hT := diam(T )
∣∣∣ ˆE
η · ∇u · [ϕh]E
∣∣∣(5.46)≤ ‖∇u‖L2(E) · ‖[ϕh]E‖L2(E)
≤ ‖∇u‖L2(∂T ) · ‖[ϕh]E‖L2(E)
(5.47)≤ c ·
(h− 1
2
T · |∇u|H0(T ) + h12
T · |∇u|H1(T )
)· ‖[ϕh]E‖L2(E) (∗)
wobei 0 < c �= c(hT ). Wir wollen nun den Term
|∇u|H0(T ) =( n∑
i=1
|∂iu|2H0(T )
) 12
weiter abschätzen. Sei nun p ∈ Pn1 das Polynom aus Satz 5.2.4, so dass für alle α ∈ N
n0 mit
|α| ≤ 1 ˆT
Dα(u− p) = 0,
dann ist nach der Poincaré-Ungleichung aus Satz 5.2.1
|∂i(u− p)|H0(T ) ≤ c′ · hT · |∂i(u − p)|H1(T ),
wobei 0 < c′ �= c′(hT ) und somit
|∇(u− p)|H0(T ) ≤ c′ · hT · |∇(u− p)|H1(T ). (∗∗)
Nach Voraussetzung gilt für p ∈ Pn1 ⊆ Pn
k
ˆE
η · ∇p · [ϕ]E(5.48)= 0

5.4. DER KONSISTENZ-FEHLER 67
und somit∣∣∣ˆE
η · ∇u · [ϕh]E
∣∣∣ =∣∣∣ˆ
E
η · ∇(u− p) · [ϕh]E
∣∣∣(∗)≤ c ·
(h− 1
2
T · |∇(u− p)|H0(T ) + h12
T · |∇(u− p)|H1(T )
)· ‖[ϕh]E‖L2(E)
(∗∗)≤ c ·
(c′ · h
12
T · |∇(u − p)|H1(T ) + h12
T · |∇(u− p)|H1(T )
)· ‖[ϕh]E‖L2(E)
= c · (1 + c′) · h12
T · |∇(u − p)|H1(T ) · ‖[ϕh]E‖L2(E)
≤ c · (1 + c′) · h12
T ·(|∇u|H1(T ) + |∇p|H1(T )
)· ‖[ϕh]E‖L2(E)
≤ c · (1 + c′) · h12
T · |∇u|H1(T ) · ‖[ϕh]E‖L2(E), (†)
da p ∈ Pn1 und somit |∇p|H1(T ) = 0.
Desweiteren gilt
|∇u|2H1(T ) =∑|α|=1
|Dαu|2H1(T )
=∑|α|=1
∑|β|=1
|DβDαu|2H0(T )
=∑|α|=1
∑|β|=1
|Dα+βu|2H0(T )
≤ 2∑|γ|=2
|Dγu|2H0(T )
= 2 · |u|2H2(T ),
und Einsetzen in (†) ergibt nun mit c′′ :=√2c(1 + c′)∣∣∣ˆ
E
η · ∇u · [ϕh]E
∣∣∣ ≤ c′′ · h12
T · |u|H2(T ) · ‖[ϕh]E‖L2(E). (††)
Wir wollen nun das Bramble-Hilbert-Lemma anwenden und setzen dazu
X := R
| · |X := | · |
�(u) :=
ˆE
η · ∇u · [ϕh]E ,
dann ist nach Voraussetzung (5.48) gerade �(p) = 0 für alle p ∈ Pnk .
Desweiteren ist
|�(u)|X(††)≤ c′′ · h
12
T · |u|H2(T ) · ‖[ϕh]E‖L2(E),
und das Bramble-Hilbert-Lemma liefert uns die Abschätzung∣∣∣ ˆE
η · ∇u · [ϕh]E
∣∣∣ ≤ c′′ · h12
T · c′′′ · hk−1T · |u|Hk+1(T ) · ‖[ϕh]E‖L2(E)
= c′′ · c′′′ · hk−12
T · |u|Hk+1(T ) · ‖[ϕh]E‖L2(E)
wobei 0 < c′′′ = c′′′(n, k) �= c′′′(h, u, ϕh). Nun ist hT = diam(T ) ≤ h und k ≥ 1, undwir können |u|Hk+1(T ) durch die Summe über alle T ∈ T (E) abschätzen, womit wir dieBehauptung erhalten. �
Wir haben gesehen, dass wir mit der zusätzlichen Forderung (5.48) an Sh die Abschätzung(5.49) erhalten, welche unserem Ziel
κh(u)!≤ c · hk · |u|k+1,h

68 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
schon sehr nahe kommt. Es gibt jedoch noch zwei Probleme, welche wir lösen müssen: ZumEinen mussten wir durch die Anwendung von Satz 5.4.3 eine halbe h-Potenz „opfern“ undzum Anderen müssen wir den Faktor ‖[ϕh]E‖L2(E) weiter abschätzen. Wir können jetzt aberdas Nützliche mit dem Praktischen verbinden und mit dem folgenden Satz beide Problemeauf einen Schlag lösen.
Satz 5.4.5Seien die Voraussetzungen von Satz 5.4.3 erfüllt, dann existiert ein 0 < c �= c(h), so dassfür jedes E ∈ Eh für jedes ϕh ∈ H1
0(Th) die Abschätzung
‖[ϕh]E‖L2(E) ≤ c · h 12 ·
∑T∈T (E)
|ϕh|H1(T ) (5.50)
gilt.
Beweis.vgl. [13, Beweis von Theorem 4] �
Fassen wir nun Satz 5.4.4 und Satz 5.4.5 zusammen, so sind wir bereits jetzt in der Lage,den Konsistenz-Fehler κh(u) wie gewünscht abzuschätzen, jedoch benötigen wir dazu nocheine äußerst elementare Abschätzung.
Hilfssatz 5.4.6Seien a, b ∈ R, dann gilt
(a+ b)2 ≤ 2 · (a2 + b2). (5.51)
Beweis.Seien a, b ∈ R, dann gilt
(a+ b)2 = a2 + 2ab+ b2. (∗)Desweiteren gilt
0 ≤ (a− b)2 = a2 − 2ab+ b2
=⇒ 2ab ≤ a2 + b2,
und Einsetzen in (∗) ergibt die Behauptung. �
Satz 5.4.7Seien die Voraussetzungen von Satz 5.4.3 erfüllt. Es sei k ∈ N, so dass für jedes p ∈ Pn
k
und jedes E ∈ Eh ˆE
η · ∇p · [ϕh]E = 0 ∀ϕh ∈ Sh (5.52)
gilt, dann existiert ein 0 < c �= c(h), so dass für die Lösung u ∈ H10(Ω)∩Hk+1(Ω) von (5.41)
für jedes ϕh ∈ Sh die Abschätzung∣∣ah(u, ϕh)− bh(ϕh)∣∣ ≤ c · hk · |u|k+1,h · |ϕh|1,h (5.53)
gilt.
5.4. DER KONSISTENZ-FEHLER 69
Beweis.Sei ϕh ∈ Sh beliebig, dann gilt
|ah(u, ϕh)− bh(ϕh)|(5.45)≤
∑E∈Eh
∣∣∣ˆE
η · ∇u · [ϕh]E
∣∣∣(5.49)≤ c · hk− 1
2 ·∑E∈Eh
( ∑T∈T (E)
|u|Hk+1(T )
)· ‖[ϕh]E‖L2(E)
(5.50)≤ cc′ · hk ·
∑E∈Eh
( ∑T∈T (E)
|u|Hk+1(T )
)·( ∑
T∈T (E)
|ϕh|H1(T )
).
Wir wenden die Cauchy-Schwarz-Ungleichung auf die äußere Summe an und erhalten
|ah(u, ϕh)− bh(ϕh)| ≤ cc′ · hk ·( ∑
E∈Eh
( ∑T∈T (E)
|u|Hk+1(T )
)2) 1
2
·( ∑
E∈Eh
( ∑T∈T (E)
|ϕh|H1(T )
)2) 1
2
. (∗)
Da wir ein konformes Gitter voraussetzen, ist card(T (E)) ∈ {1, 2}, d.h. es gibt genau eineoder zwei Zellen T ∈ Th, welche zu einer Seitenfläche E ∈ Eh adjazent sind. Wir wollen andieser Stelle eine Fall-Unterscheidung treffen:
1. Ist card(T (E)) = 1, so gilt offensichtlich( ∑T∈T (E)
|u|Hk+1(T )
)2
=∑
T∈T (E)
|u|2Hk+1(T ).
2. Ist card(T (E)) = 2, so gilt nach Hilfssatz 5.4.6 die Ungleichung( ∑T∈T (E)
|u|Hk+1(T )
)2
≤ 2 ·∑
T∈T (E)
|u|2Hk+1(T ).
Also ist in jedem Falle ( ∑T∈T (E)
|u|Hk+1(T )
)2
≤ 2 ·∑
T∈T (E)
|u|2Hk+1(T ),
und analog gilt auch ( ∑T∈T (E)
|ϕh|H1(T )
)2
≤ 2 ·∑
T∈T (E)
|ϕh|2H1(T ).
Setzen wir diese Erkenntnis in (∗) ein, so erhalten wir
|ah(u, ϕh)− bh(ϕh)| ≤ 2cc′ · hk ·( ∑
E∈Eh
∑T∈T (E)
|u|2Hk+1(T )
) 12
·( ∑
E∈Eh
∑T∈T (E)
|ϕh|2H1(T )
) 12
. (∗∗)
Betrachten wir nun den Doppel-Summen-Ausdruck∑E∈Eh
∑T∈T (E)

70 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
genauer, so stellen wir fest, dass jedes T ∈ T genau card(E(T ))-mal auftaucht – also jeeinmal für jede Seitenfläche von T . Da die Anzahl der Seitenflächen von T jedoch lediglichvon n und der Form von T abhängt (n+ 1 für Simplizes; 2n für Qn
1 -Würfel) können wir fürein 0 < c′′ = c′′(n) die Abschätzung∑
E∈Eh
∑T∈T (E)
|u|2Hk+1(T ) ≤ c′′ ·∑T∈Th
|u|2Hk+1(T )
= c′′ · |u|2k+1,h
durchführen. Analog folgt auch∑E∈Eh
∑T∈T (E)
|ϕh|2H1(T ) ≤ c′′ · |ϕh|21,h
und wir erhalten aus (∗∗) somit
|ah(u, ϕh)− bh(ϕh)| ≤ 2cc′c′′ · hk · |u|k+1,h · |ϕh|1,h.
�
Betrachten wir nun die Definition des Konsistenz-Fehlers
κh(u) = sup{|ah(u, ϕh)− bh(ϕh)|
∣∣∣ ϕh ∈ Sh : |ϕh|1,h = 1},
so sehen wir, dass wir mit dem vorangegangen Satz den Konsistenz-Fehler durch
κh(u) ≤ c · hk · |u|k+1,h
abgeschätzt haben. Wir wollen nun die in diesem Abschnitt gemachten Voraussetzungenzusammenfassen:
1. Die Gitter-Folge (Th) muss die Voraussetzungen von Satz 5.3.7 erfüllen; dies habenwir für Satz 5.4.3 benötigt.
2. Die exakte Lösung u muss in H10(Ω) ∩ Hk+1(Ω) liegen; dies war vor allem für Satz
5.4.7 notwendig.
3. Für den Ansatz-Raum Sh ⊂ H10(Th) muss für jedes p ∈ Pn
k auf jeder SeitenflächeE ∈ Eh die Voraussetzungˆ
E
η · ∇p · [ϕh]E = 0 ∀ϕh ∈ Sh
erfüllt sein.
Die ersten beiden Forderungen sind unproblematisch, denn diese haben wir bereits für dieAbschätzung des Diskretisierungs-Fehlers in Abschnitt 5.3 benutzt. Lediglich die dritteForderung ist neu: die Normalen-Ableitung jedes Polynoms in Pn
k muss L2-orthogonal aufdem Sprung [ϕh]E stehen – und dies ist für allgemeine E ∈ Eh eine äußerst unangenehmeForderung.
Wir können jedoch einen wichtigen Spezialfall angeben, denn für eine planare Seitenflä-che E ∈ Eh, d.h. wenn E in einer (n− 1)-dimensionalen Hyper-Ebene enthalten ist, ist derNormalen-Vektor η auf ganz E konstant und somit die Normalen-Ableitung η · ∇p ∈ Pn
k−1.Dies wollen wir im folgenden Korollar zusammenfassen.
Korollar 5.4.8Seien die Voraussetzungen von Satz 5.4.3 erfüllt und seien alle Seitenflächen E ∈ Eh planar.Es sei k ∈ N, so dass für jedes p ∈ Pn
k−1 und jedes E ∈ EhˆE
p · [ϕh]E = 0 ∀ϕh ∈ Sh (5.54)

5.5. ANALYSE DER QK-ELEMENTE 71
gilt, dann existiert ein 0 < c �= c(h), so dass für die Lösung u ∈ H10(Ω)∩Hk+1(Ω) von (5.41)
die Abschätzungκh(u) ≤ c · hk · |u|k+1,h (5.55)
gilt.
Beweis.Jedes E ∈ Eh ist nach Voraussetzung planar und somit ist der Normalen-Vektor η auf ganzE konstant. Dies impliziert, dass für jedes p ∈ Pn
k und jedes E ∈ Eh gerade η · ∇p ∈ Pnk−1
gilt. Somit folgt aus (5.54) direkt die Voraussetzung (5.52) von Satz 5.4.7, welcher dieBehauptung liefert. �
5.5 Analyse der Qk-ElementeWir wollen nun unsere Vorarbeiten zur Abschätzung der Diskretisierungs- und Konsistenz-Fehler dazu nutzen, die in Kapitel 4 vorgestellten Qk-Familien zu analysieren, jedoch be-schränken wir uns hierbei auf die beiden parametrischen Varianten.
Als ersten Schritt wollen wir im Hinblick auf Satz 5.3.4, welchen wir für die Abschätzungdes Diskretisierungs-Fehlers benötigen, nachweisen, dass die in Abschnitt 4.1 definiertenReferenz-Knotenfunktionale im Dualraum von H1(T ) liegen.
Satz 5.5.1Für jedes α ∈ N
n0 ist das Referenz-Bubble-Funktional Nα
Tnach (4.3) im Dualraum von
H1(T ). Für jedes α ∈ Nn−10 und jedes E ∈ E(n−1)(T ) ist das Referenz-Flächen-Moment Nα
E
nach (4.5) im Dualraum von H1(T ).
Beweis.Sei u ∈ H1(T ) beliebig.Sei α ∈ N
n0 beliebig, dann ist nach (4.3)
NαT(u) =
1
|T |
ˆT
u(x) · Lα(x) dx
und somit aufgrund der Linearität des Integrals auch NαT
linear.Desweiteren gilt nach der Cauchy-Schwarz-Ungleichung
NαT(u) =
1
|T |〈u, Lα〉L2(T )
≤ 1
|T |‖u‖L2(T ) · ‖Lα‖L2(T )
≤ 1
|T |‖u‖H1(T ) · ‖Lα‖L2(T ),
und ist somit nach Satz 2.2.5 NαT: H1(T )→ R stetig.
Seien nun E ∈ E(n−1)(T ) und α ∈ Nn−10 beliebig, dann ist nach (4.5)
NαE (u) =
1
|E|
ˆE
u(FE(x)) · Lα(x) dx,
und somit ist aufgrund der Linearität des Integrals und der Konkatenation auch NαE linear.
Wiederrum folgt mit der Cauchy-Schwarz-Ungleichung
NαE (u) =
1
|E|〈u ◦ FE , Lα〉L2( E)
≤ 1
|E|‖u ◦ FE‖L2( E) · ‖Lα‖L2( E). (∗)

72 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
Nun ist‖u ◦ FE‖2L2( E)
=
ˆE
(u ◦ FE)2,
und mit der Funktional-Determinante JE von FE erhalten wir nach Satz 2.3.4
‖u ◦ FE‖2L2( E)=
1
JE
ˆE
JE · (u ◦ FE)2 =
1
JE
ˆE
u2 =1
JE‖u‖2L2(E).
Für
c :=‖Lα‖L2( E)
|E| ·√JE
erhalten wir nach (∗)Nα
E (u) = c · ‖u‖L2(E). (∗∗)
Nun ist E ⊂ ∂T und, da der Spur-Operator linear und stetig ist, erhalten wir nach Korollar2.2.6 für ein c′ > 0
‖u‖L2(E) ≤ ‖u‖L2(∂ T ) ≤ c′ · ‖u‖H1(T ).
Einsetzen in (∗∗) ergibt nunNα
E (u) ≤ cc′ · ‖u‖H1(T ),
also ist NαE : H1(T )→ R nach Satz 2.2.5 stetig. �
Wir wollen nun mit der Analyse der parametrischen Strandard-Variante des Qk-Elementes,welche wir in Abschnitt 4.2 vorgestellt haben, beginnen. Um die in diesem Kapitel erarbei-tete Theorie anwenden zu können, müssen wir insbesondere im Hinblick auf das Berger-Scott-Strang-Lemma nachweisen, dass für ein Qn
1 -Gitter die Teilraum-Beziehung Qk(Th) ⊂ H10(Th)
erfüllt ist, dafür werden wir uns jedoch auf einen Teilraum des Qk(Th) beschränken müssen,welchen wir nun definieren möchten.
Definition 5.5.2Sei Ω ⊂ R
n ein Lipschitz-Gebiet und es sei Th ein Qn1 -Gitter auf Ω.
Für k ∈ N definieren wir
Qk,0(Th) :={ϕ ∈ Qk(Th)
∣∣∣ ∀ E ∈ Ebh, ∀ α ∈ Nn−10 ,
|α| ≤ k − 1 : NαE (ϕ) = 0
}, (5.56)
wobeiEbh :=
{E ∈ E(n−1)
h
∣∣ E ⊂ ∂Ω}
die Menge aller Rand-Seitenflächen bezeichne.
Der Raum Qk,0(Th) ist also, grob gesprochen, der Teilraum des Qk(Th), welcher die Rand-bedingungen trace(u) = 0 (diskret) erfüllt. Haben wir für den Raum Qk(Th) die durch dieKnotenfunktionale induzierte Basis berechnet, so erhalten wir nach (5.56) den TeilraumQk,0(Th), indem wir alle Basisfunktionen, welche einem Rand-Flächen-Moment zugeordnetsind, aus der Basis entfernen.
Im nächsten Schritt wollen wir zeigen, dass wir mit Hilfe der Flächen-ParametrisierungFE : E → E eine erste Aussage über den Sprung [ϕ]E einer Funktion ϕ ∈ Qk,0(Th) nach-weisen können.
Satz 5.5.3Sei Th ein Qn
1 -Gitter und es sei k ∈ N, dann gilt für jedes E ∈ E(n−1)h , jedes p ∈ Pn−1
k−1 undjedes ϕ ∈ Qk,0(Th) ˆ
E
p ·([ϕ]E ◦ FE
)= 0. (5.57)
5.5. ANALYSE DER QK-ELEMENTE 73
Beweis.Seien k ∈ N, ϕ ∈ Qk,0 beliebig aber fest.
Fall 1: Sei E ∈ E(n−1)h eine beliebige innere Seitenfläche,
d.h. es gebe T, T ′ ∈ Th, so dass E ∈ E(n−1)(T ) ∩ E(n−1)(T ′), dann gilt für jedes α ∈ Nn−10
mit |α| ≤ k − 1 für das Flächen-Moment
NαE (ϕ|T ) = Nα
E (ϕ|T ′ )
1
|E|
ˆE
ϕ|T (FE(x)) · Lα(x) dx =1
|E|
ˆE
ϕ|T ′(FE(x)) · Lα(x) dx
ˆE
ϕ|T (FE(x)) · Lα(x) dx =
ˆE
ϕ|T ′(FE(x)) · Lα(x) dx
und durch Subtraktion erhalten wir
0 =
ˆE
(ϕ|T (FE(x)) − ϕ|T ′(FE(x))
)· Lα(x) dx
=
ˆE
((ϕ|T − ϕ|T ′
)◦ FE(x)
)· Lα(x) dx
=
ˆE
([ϕ]E ◦ FE(x)
)· Lα(x) dx.
Nun war α ∈ Nn−10 mit |α| ≤ k − 1 beliebig und, da die Legendre-Polynome Lα eine Basis
von Pn−1k−1 bilden, folgt somit (5.57).
Fall 2: Sei E ∈ E(n−1)h eine beliebige Rand-Seitenfläche,
dann ist nach Definition des Qk,0 für T ∈ T (E) und jedes α ∈ Nn−10 mit |α| ≤ k − 1 gerade
0 = NαE (ϕ|T )
=1
|E|
ˆE
ϕ|T (FE(x)) · Lα(x) dx
=
ˆE
ϕ|T (FE(x)) · Lα(x) dx
=
ˆE
([ϕ]E ◦ FE(x)
)· Lα(x) dx,
und somit folgt mit dem selben Argument wie in Fall 1 wieder (5.57). �
Die Aussage (5.57) ähnelt der Voraussetzung von Korollar 5.4.8, welches eine Abschätzungdes Konsistenz-Fehlers κh(u) auf Gittern mit planaren Seitenflächen liefert. Wir wollen imnun folgenden Satz diese Voraussetzung nachweisen, wobei wir uns hierbei auf affin äquiva-lente Gitter einschränken müssen.
Satz 5.5.4Sei Th ein affin äquivalentes Qn
1 -Gitter und es sei k ∈ N, dann gilt für jedes E ∈ E(n−1)h ,
jedes p ∈ Pnk−1 und jedes ϕ ∈ Qk,0(Th)
ˆE
p · [ϕ]E = 0. (5.58)
Beweis.Seien k ∈ N, ϕ ∈ Qk,0 und p ∈ Pn
k−1 beliebig aber fest.Sei E ∈ E(n−1) eine beliebige Seitenfläche, dann ist mit der Transformations-Formel ausSatz 2.3.4 ˆ
E
[ϕ]E · p =ˆ
E
JE(x) ·([ϕ]E ◦ FE(x)
)·(p ◦ FE(x)
)dx.

74 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
Nun ist Th als affin äquivalent vorausgesetzt, also ist die Flächen-Parametrisierung FE :E → E eine affine Abbildung. Dies impliziert erstens, dass ihre Funktional-DeterminanteJE(x) auf ganz E konstant ist und, zweitens, dass (p ◦ FE) ∈ Pn−1
k−1 gilt, womit Satz 5.5.3die Behauptung liefert. �
Mit dem vorangegangenen Satz haben wir gleich zwei wichtige Aussagen nachgewiesen. ZumEinen können wir p ≡ 1 ∈ Pn
0 in (5.58) einsetzen und erhalten somit für jede SeitenflächeE ∈ E(n−1)
h ˆE
[ϕ]E = 0,
was uns die Beziehung Qk,0(Th) ⊂ H10(Th) liefert, welche wir für die Anwendung des Berger-
Scott-Strang-Lemmas benötigen. Andererseits haben wir mit (5.58) die an den Ansatz-Raum gestellten Voraussetzungen von Korollar 5.4.8 nachgewiesen, mit welchem wir denKonsistenz-Fehler κh(u) abschätzen können.
Theorem 5.5.5: Fehler-Abschätzung für Qk
Es sei Ω ⊂ Rn ein Lipschitz-Gebiet und ferner sei (Th) eine affin äquivalente Qn
1 -Gitter-Folge auf Ω, welche die Voraussetzungen von Satz 5.3.8 erfüllt. Es sei f ∈ L2(Ω) und es seiu ∈ H1
0(Ω)∩Hk+1(Ω) die Lösung der Poisson-Gleichung (5.6). Sei k ∈ N, dann existiert einevon der Gitterweite h unabhängige Konstante c > 0, so dass für die Lösungen uh ∈ Qk,0(Th)von (5.11) die Abschätzung
|u− uh|1,h ≤ c · hk · |u|k+1,h (5.59)
gilt.
Beweis.Es ist Qk,0(Th) ⊂ H1
0(Th), und somit ist das Berger-Scott-Strang-Lemma anwendbar.Der Referenz-Spann Sk des Raumes Qk,0 enthält nach Konstruktion den Pn
k als Teilraum,somit ist nach Korollar 3.4.3 der Raum Qk,0(Th) auf jedem affin äquivalenten Gitter Thvom Grad k. Nach Satz 5.5.1 sind alle Referenz-Knotenfunktionale im Dualraum vonH1(T )und mit diesen Voraussetzungen ist Satz 5.3.6 anwendbar, welcher uns die notwendigenVoraussetzungen von Satz 5.3.3 liefert, mit dem die Abschätzung
|u−Πh(u)|1,h ≤ c · hk · |u|k+1,h
des Diskretisierungs-Fehlers folgt.Darüber hinaus sind die Seitenflächen E ∈ E(n−1)
h eines affin äquivalenten Gitters Th planar,womit nach Satz 5.5.4 und Korollar 5.4.8 für den Konsistenz-Fehler die Abschätzung
κh(u) ≤ c · hk · |u|k+1,h
gilt. �
Wir wollen nun mit der Analyse der in Abschnitt 4.3 vorgestellten Qbk-Elemente beginnen.
Wir werden uns hierbei auf den zwei-dimensionalen Fall mit k ∈ {1, 2} beschränken, da wirnur diese Varianten konstruiert und ihre Unisolvenz nachgewiesen haben. Analog zu denQk-Elementen müssen wir uns auch hier wieder auf einen Teilraum Qb
k,0 beschränken.
Definition 5.5.6Sei Ω ⊂ R
2 ein Lipschitz-Gebiet und es sei Th ein Q21-Gitter auf Ω.
Für k ∈ {1, 2} definieren wir
Qbk,0(Th) :=
{ϕ ∈ Qk(Th)
∣∣∣ ∀ E ∈ Ebh, ∀ α ∈ Nn−10 ,
|α| ≤ k − 1 : NαE (ϕ) = 0
}, (5.60)
5.5. ANALYSE DER QK-ELEMENTE 75
wobeiEbh :=
{E ∈ E(n−1)
h
∣∣ E ⊂ ∂Ω}
die Menge aller Rand-Seitenflächen bezeichne.
Wir wollen nun den für die Qk,0-Elemente nachgewiesenen Satz 5.5.4 auf die Qbk,0-Elemente
übertragen. Wir wollen den Beweis jedoch auf die wesentlichen Unterschiede kürzen, da erzum größten Teil mit dem Beweis von Satz 5.5.4 übereinstimmt.
Satz 5.5.7Sei Th ein Q2
1-Gitter und es sei k ∈ {1, 2}, dann gilt für jedes E ∈ E(1)h , jedes p ∈ P2k−1 und
jedes ϕ ∈ Qbk,0(Th) ˆ
E
p · [ϕ]E = 0. (5.61)
Beweis.Analog zu Satz 5.5.3 zeigt man zunächst, dass für jedes E ∈ E(1)h , jedes p ∈ P1
k−1 und jedesϕ ∈ Qb
k,0(Th) ˆE
p ·([ϕ]E ◦ FE
)= 0
gilt. Für ein zwei-dimensionales Gitter Th ist die Kanten-Parametrisierung FE : E → E nachDefinition affin, da Q1
1 = P11 . Somit folgt (5.61) analog zum Beweis von Satz 5.5.4. �
Mit dem folgenden Theorem wollen wir nachweisen, dass wir mit den Qbk,0-Elementen die
gleiche Fehler-Abschätzung wie für die Qk,0-Elemente erhalten, ohne jedoch fordern zu müs-sen, dass die Gitter-Folge (Th) affin äquivalent sein soll.
Theorem 5.5.8: Fehler-Abschätzung für Qbk
Es sei Ω ⊂ R2 ein Lipschitz-Gebiet und ferner sei (Th) eine Q2
1-Gitter-Folge auf Ω, welche dieVoraussetzungen von Satz 5.3.9 erfüllt. Es sei f ∈ L2(Ω) und es sei u ∈ H1
0(Ω)∩Hk+1(Ω) dieLösung der Poisson-Gleichung (5.6). Sei k ∈ {1, 2}, dann existiert eine von der Gitterweiteh unabhängige Konstante c > 0, so dass für die Lösungen uh ∈ Qb
k,0(Th) von (5.11) dieAbschätzung
|u − uh|1,h ≤ c · hk · |u|k+1,h (5.62)
gilt.
Beweis.Der Referenz-Spann Sk des Raumes Qb
k,0 enthält nach Konstruktion den Q2k als Teilraum,
somit ist nach Korollar 3.4.3 der Raum Qbk,0(Th) auf jedem Q2
1-Gitter Th vom Grad k.Der Rest des Beweises verläuft analog zum Beweis von Theorem 5.5.5, wobei für dieAnwendung von Korollar 5.4.8 entscheidend ist, dass alle Kanten eines Q2
1-Gitters planarsind. �

76 KAPITEL 5. A-PRIORI FEHLER-ANALYSE
Kapitel 6
Numerische Versuche
Wir wollen in diesem Kapitel unsere in Abschnitt 5.5 nachgewiesenen Fehler-Abschät-zungen für die Qk- und Qb
k-Elemente in einigen praktischen Versuchen mit der zwei- unddrei-dimensionalen Poisson-Gleichung verifizieren, aber auch untersuchen, wie sich die Ele-mente verhalten, wenn die für die a-priori Fehler-Analyse geforderten Voraussetzungen ver-letzt sind. Wir werden darüber hinaus auch die in Abschnitt 4.4 vorgestellten nicht-parametrischen Qn
k -Elemente mit in Betracht ziehen, obwohl – oder insbesondere weil –wir für diese Variante keine theoretische Analyse zur Hand haben.
Die Finite-Elemente-Software, mit der die numerischen Versuche für diese Arbeit durch-geführt wurden, ist das von den Mitgliedern des Institutes für Angewandte Mathematik undNumerik an der Fakultät für Mathematik der Technischen Universität Dortmund entwickel-te Feat 2, welches dort seit vielen Jahren erfolgreich bei der Simulation von physikalischmotivierten partiellen Differentialgleichungen im Einsatz ist.
Wir wollen in diesem Kapitel das Verhalten der drei in Kapitel 4 vorgestellten Qk-, Qbk-
und Qnk -Elemente für verschiedene Gitter-Folgen analysieren, wobei wir uns jedoch für al-
le Varianten auf die Fälle k ∈ {1, 2} einschränken müssen, da bis zum jetzigen Zeitpunktaus technischen Gründen noch keine Implementierungen der Qk-Elemente für k ≥ 3 rea-lisiert werden konnten. Darüber hinaus müssen wir aus den selben Gründen in den drei-dimensionalen Versuchen auch auf die Qb
k-Elemente verzichten.
In den folgenden Versuchen wollen wir den Fehler der diskreten Lösungen uh zu der analy-tischen Lösung u untersuchen, wobei wir den Fehler in der gebrochenen | · |1,h-Norm, für diewir auch die a-priori Fehler-Analyse durchgeführt haben, sowie zusätzlich in der L∞-Normbetrachten. Wir verzichten hierbei darauf, den Fehler darüber hinaus auch noch in der L2-Norm anzugeben – es sei jedoch angemerkt, dass dieser in allen hier aufgeführten Versuchensowohl asymptotisch als auch von den absoluten Werten mit den L∞-Fehlern vergleichbarist. Zum Vergleich wollen wir auch die Fehler der konformen Qk-Elemente, welche wir inBeispiel 3.4.4 definiert haben, angeben.
6.1 Versuche auf dem Einheits-Quadrat in 2D
Wir wollen zunächst die genaue Konfiguration des zu lösenden Problems angeben. Das Ge-biet, auf welchem wir rechnen möchten, ist das zwei-dimensionale Einheitsquadrat, d.h.
Ω := (0, 1)2
und die zu lösende Differentialgleichung ist die Poisson-Gleichung, welche wir in Abschnitt2.4 definiert haben. Die gesuchte Lösung u ∈ H1
0(Ω) sowie die dazugehörige rechte Seite
77

78 KAPITEL 6. NUMERISCHE VERSUCHE
f ∈ L2(Ω) sind dabei durch
u(x, y) = sin(πx) · sin(πy)f(x, y) = 2π2 · sin(πx) · sin(πy)
gegeben. Hierbei ist u ∈ Hk(Ω) für jedes k ∈ N.
Wir wollen in unseren ersten Versuchen zwei Gitter-Folgen betrachten, wobei wir jeweilsdas k-te Gitter der Folge als Level k bezeichnen:
1. Eine reguläre Gitter-Folge, welche, ausgehend von einer einzelnen Zelle T := Ω, durchdie rekursive Unterteilung jeder Zelle T des vorherigen Gitters in vier kongruenteQuadrate entsteht.
2. Eine gestörte Gitter-Folge, deren Gitter auf Level k durch Verschiebung aller innerenKnoten vi ∈ Vh des regulären Gitters auf Level k um h
5 in eine stochastisch bestimmteRichtung entsteht.
Abbildung 6.1: Das reguläre (links) und das um h5 gestörte Gitter (rechts) auf Level 3.
Die reguläre Gitter-Folge besteht auf jedem Level aus Quadraten und ist somit eine affinäquivalente Gitter-Folge, welche den Voraussetzungen von Satz 5.3.8 genügt. Die gestörteGitter-Folge ist nicht affin äquivalent, erfüllt jedoch die Voraussetzungen von Satz 5.3.9,welchen wir für die a-priori Fehler-Analyse im Zwei-dimensionalen verwendet haben. Für diereguläre Gitter-Folge entspricht die Gitterweite auf Level k gerade
√2·2−k, bei der gestörten
Gitter-Folge ist die Gitterweite aufgrund der Störung auf jedem Level etwas größer als diedes entsprechenden regulären Gitters. Die Anzahl der Zellen auf Level k entspricht für beideGitter-Folgen 4k.
Bevor wir mit der Betrachtung der eigentlichen Fehler beginnen, wollen wir zunächst ei-nige statistische Daten anbringen. In Tabelle 6.1.1 sehen wir die Anzahl der Freiheitsgrade– also die Dimension der Ansatz-Räume – für die jeweiligen Ansatz-Räume auf jedem Level.Wir sehen, dass das Q1-Element asymptotisch doppelt so viele Freiheitsgrade besitzt wiedas konforme Q1-Element – das Qb
1-Element sogar drei mal so viele. Das Q2-Element besitztasymptotisch 25% mehr Freiheitsgrade als das konforme Q2-Element, beim Qb
2-Element be-trägt der Zuwachs 50%.
In Tabelle 6.1.2 sehen wir die Anzahl der Nicht-Null-Einträge der System-Matrix für diejeweiligen Ansatz-Räume. Wir sehen für das Q1-Element asymptotisch einen Zuwachs umetwa 50% gegenüber dem konformen Q1-Element, während sich die Anzahl der Einträge fürdas Qb
1-Element sogar mehr als verdoppelt. Bei den Q2- und Q2-Elementen ist die Differenzrelativ gering, während das Qb
2-Element einen Zuwachs von etwa 50% gegenüber dem kon-formen Q2-Element verzeichnet.

6.1. VERSUCHE AUF DEM EINHEITS-QUADRAT IN 2D 79
Level Q1 Q1 / Qn1 Qb
1 Q2 Q2 / Qn2 Qb
2
1 9 12 16 25 28 322 25 40 56 81 96 1123 81 144 208 289 352 4164 289 544 800 1.089 1.344 1.6005 1.089 2.112 3.136 4.225 5.248 6.2726 4.225 8.320 12.416 16.641 20.736 24.8327 16.641 33.024 49.408 66.049 82.432 98.8168 66.049 131.584 197.120 263.169 328.704 394.2409 263.169 525.312 787.456 — — —
Tabelle 6.1.1: Anzahl der Freiheitsgrade auf jedem Level.
Level Q1 Q1 / Qn1 Qb
1 Q2 Q2 / Qn2 Qb
2
1 49 60 96 289 308 3842 169 232 376 1.089 1.200 1.5043 625 912 1.488 4.225 4.736 5.9524 2.401 3.616 5.920 16.641 18.816 23.6805 9.409 14.400 23.616 66.049 75.008 94.4646 37.249 57.472 94.336 263.169 299.520 377.3447 148.225 229.632 377.088 1.050.625 1.197.056 1.508.3528 591.361 918.016 1.507.840 4.198.401 4.786.176 6.031.3609 2.362.369 3.671.040 6.030.336 — — —
Tabelle 6.1.2: Anzahl der Matrix-Einträge auf jedem Level.
Wir wollen zunächst die Fehler für die konformen Qk-Elemente betrachten. In Tabelle 6.1.3sehen wir die H1- sowie die L∞-Fehler für die Q1- und Q2-Elemente. Die Spalte Rate gibthierbei an, um welchen Faktor der jeweilige Fehler beim Übergang von Level k−1 zu Level kreduziert wurde. Wir sehen für den H1-Fehler jeweils einen Faktor von 2k und einen Faktorvon 2k+1 für den L∞-Fehler. Da sich die Gitterweite h beim Übergang von Level k − 1 zuLevel k jeweils halbiert, entspricht dies also asymptotisch einem Fehler O(hk) für den H1-Fehler bzw. O(hk+1) für den L∞-Fehler.
In Tabelle 6.1.4 sehen wir die Fehler der konformen Qk-Elemente auf der um h5 gestörten
Gitter-Folge. Auch hier sehen wir für beide Elemente die gleiche Asymptotik wie auf derregulären Gitter-Folge, wobei die Schwankungen in der Fehler-Reduktions-Rate aufgrundder sehr starken Störung der Gitter-Folge im Toleranzbereich liegen.
In Tabelle 6.1.5 sehen wir die Fehler der parametrischen Qk-Elemente aus Abschnitt 4.2.Wir sehen, wie im Fall der konformen Qk-Elemente, für die H1-Fehler eine Fehler-Reduk-tions-Rate von 2k, was also genau unserer Prognose aus der theoretischen a-priori Fehler-Analyse, welche uns nach Theorem 5.5.5 einen Fehler von O(hk) für affin äquivalenteGitter-Folgen liefert, entspricht. Die L∞-Fehler sind hierbei sowohl absolut als auch asym-ptotisch gesehen mit denen der konformen Qk-Elemente vergleichbar.
Wir wollen nun die Fehler der Qk-Elemente auf gestörten Gitter-Folgen betrachten, wobeiwir hier drei unterschiedliche Stärken der Störung testen möchten. Wir sehen in Tabelle6.1.6, dass die Fehler für das Q1-Element schon bereits bei einer leichten Störung von h
20auf den höheren Levels stagnieren. Dies ist jedoch kein Widerspruch zu unserer a-priori Feh-ler-Analyse, da die gestörten Gitter-Folgen nicht affin äquivalent sind. Für das Q2-Elementsehen wir in Tabelle 6.1.6, Tabelle 6.1.7 und Tabelle 6.1.8 einen mit wachsender Störung
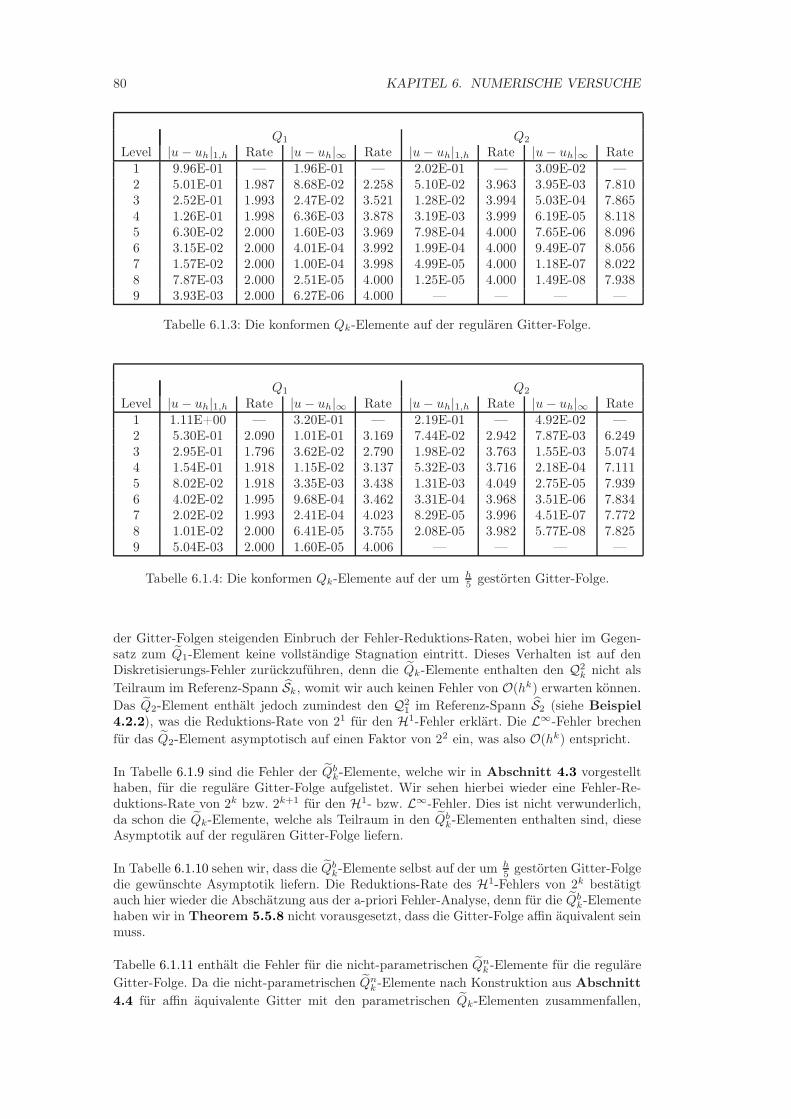
80 KAPITEL 6. NUMERISCHE VERSUCHE
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 9.96E-01 — 1.96E-01 — 2.02E-01 — 3.09E-02 —2 5.01E-01 1.987 8.68E-02 2.258 5.10E-02 3.963 3.95E-03 7.8103 2.52E-01 1.993 2.47E-02 3.521 1.28E-02 3.994 5.03E-04 7.8654 1.26E-01 1.998 6.36E-03 3.878 3.19E-03 3.999 6.19E-05 8.1185 6.30E-02 2.000 1.60E-03 3.969 7.98E-04 4.000 7.65E-06 8.0966 3.15E-02 2.000 4.01E-04 3.992 1.99E-04 4.000 9.49E-07 8.0567 1.57E-02 2.000 1.00E-04 3.998 4.99E-05 4.000 1.18E-07 8.0228 7.87E-03 2.000 2.51E-05 4.000 1.25E-05 4.000 1.49E-08 7.9389 3.93E-03 2.000 6.27E-06 4.000 — — — —
Tabelle 6.1.3: Die konformen Qk-Elemente auf der regulären Gitter-Folge.
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 1.11E+00 — 3.20E-01 — 2.19E-01 — 4.92E-02 —2 5.30E-01 2.090 1.01E-01 3.169 7.44E-02 2.942 7.87E-03 6.2493 2.95E-01 1.796 3.62E-02 2.790 1.98E-02 3.763 1.55E-03 5.0744 1.54E-01 1.918 1.15E-02 3.137 5.32E-03 3.716 2.18E-04 7.1115 8.02E-02 1.918 3.35E-03 3.438 1.31E-03 4.049 2.75E-05 7.9396 4.02E-02 1.995 9.68E-04 3.462 3.31E-04 3.968 3.51E-06 7.8347 2.02E-02 1.993 2.41E-04 4.023 8.29E-05 3.996 4.51E-07 7.7728 1.01E-02 2.000 6.41E-05 3.755 2.08E-05 3.982 5.77E-08 7.8259 5.04E-03 2.000 1.60E-05 4.006 — — — —
Tabelle 6.1.4: Die konformen Qk-Elemente auf der um h5 gestörten Gitter-Folge.
der Gitter-Folgen steigenden Einbruch der Fehler-Reduktions-Raten, wobei hier im Gegen-satz zum Q1-Element keine vollständige Stagnation eintritt. Dieses Verhalten ist auf denDiskretisierungs-Fehler zurückzuführen, denn die Qk-Elemente enthalten den Q2
k nicht alsTeilraum im Referenz-Spann Sk, womit wir auch keinen Fehler von O(hk) erwarten können.Das Q2-Element enthält jedoch zumindest den Q2
1 im Referenz-Spann S2 (siehe Beispiel4.2.2), was die Reduktions-Rate von 21 für den H1-Fehler erklärt. Die L∞-Fehler brechenfür das Q2-Element asymptotisch auf einen Faktor von 22 ein, was also O(hk) entspricht.
In Tabelle 6.1.9 sind die Fehler der Qbk-Elemente, welche wir in Abschnitt 4.3 vorgestellt
haben, für die reguläre Gitter-Folge aufgelistet. Wir sehen hierbei wieder eine Fehler-Re-duktions-Rate von 2k bzw. 2k+1 für den H1- bzw. L∞-Fehler. Dies ist nicht verwunderlich,da schon die Qk-Elemente, welche als Teilraum in den Qb
k-Elementen enthalten sind, dieseAsymptotik auf der regulären Gitter-Folge liefern.
In Tabelle 6.1.10 sehen wir, dass die Qbk-Elemente selbst auf der um h
5 gestörten Gitter-Folgedie gewünschte Asymptotik liefern. Die Reduktions-Rate des H1-Fehlers von 2k bestätigtauch hier wieder die Abschätzung aus der a-priori Fehler-Analyse, denn für die Qb
k-Elementehaben wir in Theorem 5.5.8 nicht vorausgesetzt, dass die Gitter-Folge affin äquivalent seinmuss.
Tabelle 6.1.11 enthält die Fehler für die nicht-parametrischen Qnk -Elemente für die reguläre
Gitter-Folge. Da die nicht-parametrischen Qnk -Elemente nach Konstruktion aus Abschnitt
4.4 für affin äquivalente Gitter mit den parametrischen Qk-Elementen zusammenfallen,
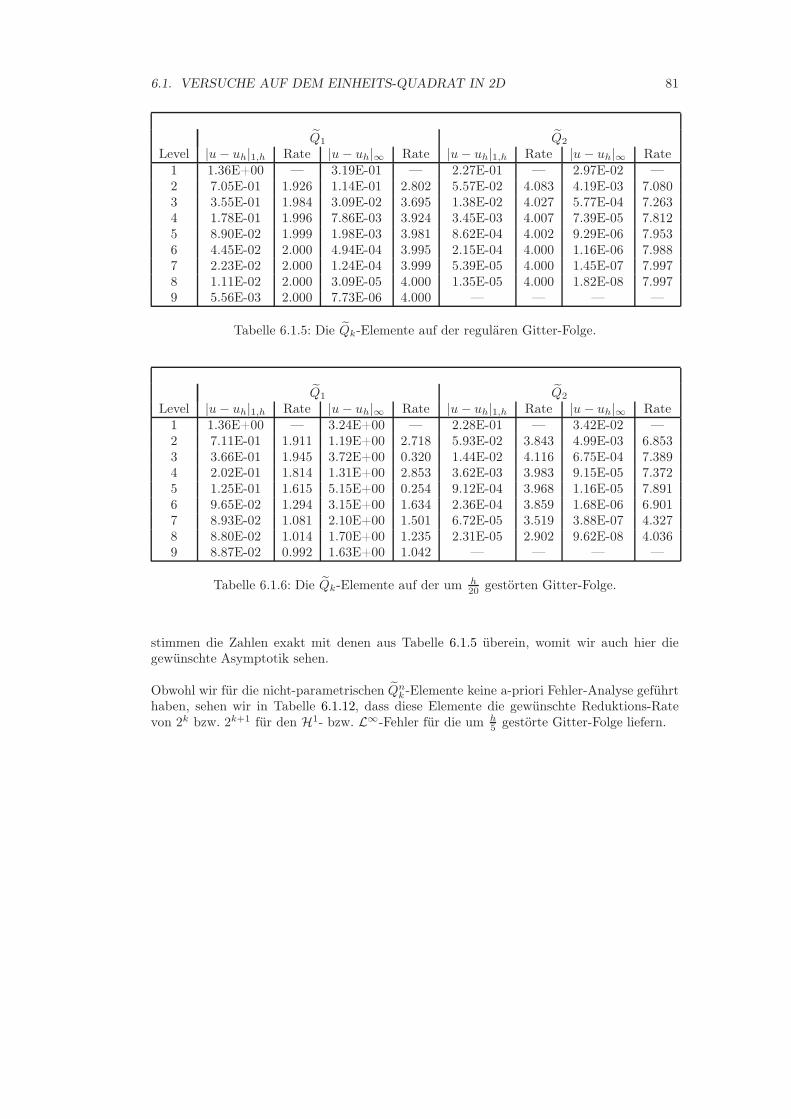
6.1. VERSUCHE AUF DEM EINHEITS-QUADRAT IN 2D 81
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate1 1.36E+00 — 3.19E-01 — 2.27E-01 — 2.97E-02 —2 7.05E-01 1.926 1.14E-01 2.802 5.57E-02 4.083 4.19E-03 7.0803 3.55E-01 1.984 3.09E-02 3.695 1.38E-02 4.027 5.77E-04 7.2634 1.78E-01 1.996 7.86E-03 3.924 3.45E-03 4.007 7.39E-05 7.8125 8.90E-02 1.999 1.98E-03 3.981 8.62E-04 4.002 9.29E-06 7.9536 4.45E-02 2.000 4.94E-04 3.995 2.15E-04 4.000 1.16E-06 7.9887 2.23E-02 2.000 1.24E-04 3.999 5.39E-05 4.000 1.45E-07 7.9978 1.11E-02 2.000 3.09E-05 4.000 1.35E-05 4.000 1.82E-08 7.9979 5.56E-03 2.000 7.73E-06 4.000 — — — —
Tabelle 6.1.5: Die Qk-Elemente auf der regulären Gitter-Folge.
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate1 1.36E+00 — 3.24E+00 — 2.28E-01 — 3.42E-02 —2 7.11E-01 1.911 1.19E+00 2.718 5.93E-02 3.843 4.99E-03 6.8533 3.66E-01 1.945 3.72E+00 0.320 1.44E-02 4.116 6.75E-04 7.3894 2.02E-01 1.814 1.31E+00 2.853 3.62E-03 3.983 9.15E-05 7.3725 1.25E-01 1.615 5.15E+00 0.254 9.12E-04 3.968 1.16E-05 7.8916 9.65E-02 1.294 3.15E+00 1.634 2.36E-04 3.859 1.68E-06 6.9017 8.93E-02 1.081 2.10E+00 1.501 6.72E-05 3.519 3.88E-07 4.3278 8.80E-02 1.014 1.70E+00 1.235 2.31E-05 2.902 9.62E-08 4.0369 8.87E-02 0.992 1.63E+00 1.042 — — — —
Tabelle 6.1.6: Die Qk-Elemente auf der um h20 gestörten Gitter-Folge.
stimmen die Zahlen exakt mit denen aus Tabelle 6.1.5 überein, womit wir auch hier diegewünschte Asymptotik sehen.
Obwohl wir für die nicht-parametrischen Qnk -Elemente keine a-priori Fehler-Analyse geführt
haben, sehen wir in Tabelle 6.1.12, dass diese Elemente die gewünschte Reduktions-Ratevon 2k bzw. 2k+1 für den H1- bzw. L∞-Fehler für die um h
5 gestörte Gitter-Folge liefern.
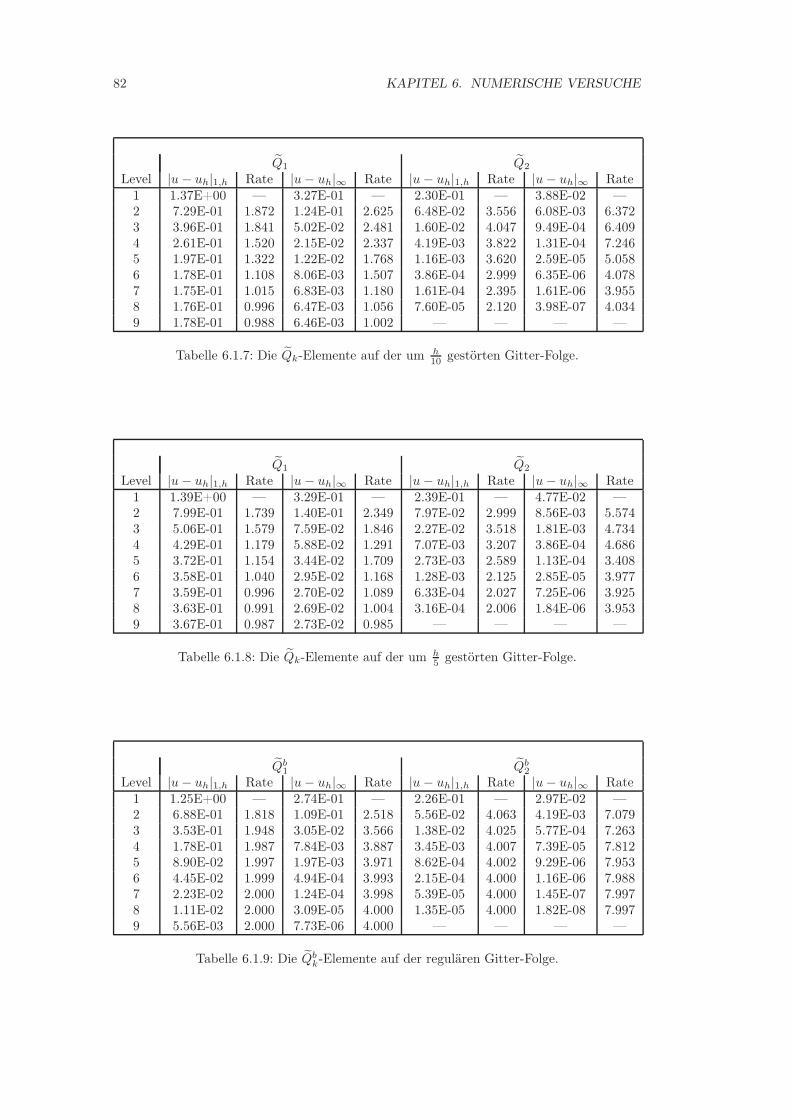
82 KAPITEL 6. NUMERISCHE VERSUCHE
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 1.37E+00 — 3.27E-01 — 2.30E-01 — 3.88E-02 —2 7.29E-01 1.872 1.24E-01 2.625 6.48E-02 3.556 6.08E-03 6.3723 3.96E-01 1.841 5.02E-02 2.481 1.60E-02 4.047 9.49E-04 6.4094 2.61E-01 1.520 2.15E-02 2.337 4.19E-03 3.822 1.31E-04 7.2465 1.97E-01 1.322 1.22E-02 1.768 1.16E-03 3.620 2.59E-05 5.0586 1.78E-01 1.108 8.06E-03 1.507 3.86E-04 2.999 6.35E-06 4.0787 1.75E-01 1.015 6.83E-03 1.180 1.61E-04 2.395 1.61E-06 3.9558 1.76E-01 0.996 6.47E-03 1.056 7.60E-05 2.120 3.98E-07 4.0349 1.78E-01 0.988 6.46E-03 1.002 — — — —
Tabelle 6.1.7: Die Qk-Elemente auf der um h10 gestörten Gitter-Folge.
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 1.39E+00 — 3.29E-01 — 2.39E-01 — 4.77E-02 —2 7.99E-01 1.739 1.40E-01 2.349 7.97E-02 2.999 8.56E-03 5.5743 5.06E-01 1.579 7.59E-02 1.846 2.27E-02 3.518 1.81E-03 4.7344 4.29E-01 1.179 5.88E-02 1.291 7.07E-03 3.207 3.86E-04 4.6865 3.72E-01 1.154 3.44E-02 1.709 2.73E-03 2.589 1.13E-04 3.4086 3.58E-01 1.040 2.95E-02 1.168 1.28E-03 2.125 2.85E-05 3.9777 3.59E-01 0.996 2.70E-02 1.089 6.33E-04 2.027 7.25E-06 3.9258 3.63E-01 0.991 2.69E-02 1.004 3.16E-04 2.006 1.84E-06 3.9539 3.67E-01 0.987 2.73E-02 0.985 — — — —
Tabelle 6.1.8: Die Qk-Elemente auf der um h5 gestörten Gitter-Folge.
Qb1 Qb
2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 1.25E+00 — 2.74E-01 — 2.26E-01 — 2.97E-02 —2 6.88E-01 1.818 1.09E-01 2.518 5.56E-02 4.063 4.19E-03 7.0793 3.53E-01 1.948 3.05E-02 3.566 1.38E-02 4.025 5.77E-04 7.2634 1.78E-01 1.987 7.84E-03 3.887 3.45E-03 4.007 7.39E-05 7.8125 8.90E-02 1.997 1.97E-03 3.971 8.62E-04 4.002 9.29E-06 7.9536 4.45E-02 1.999 4.94E-04 3.993 2.15E-04 4.000 1.16E-06 7.9887 2.23E-02 2.000 1.24E-04 3.998 5.39E-05 4.000 1.45E-07 7.9978 1.11E-02 2.000 3.09E-05 4.000 1.35E-05 4.000 1.82E-08 7.9979 5.56E-03 2.000 7.73E-06 4.000 — — — —
Tabelle 6.1.9: Die Qbk-Elemente auf der regulären Gitter-Folge.
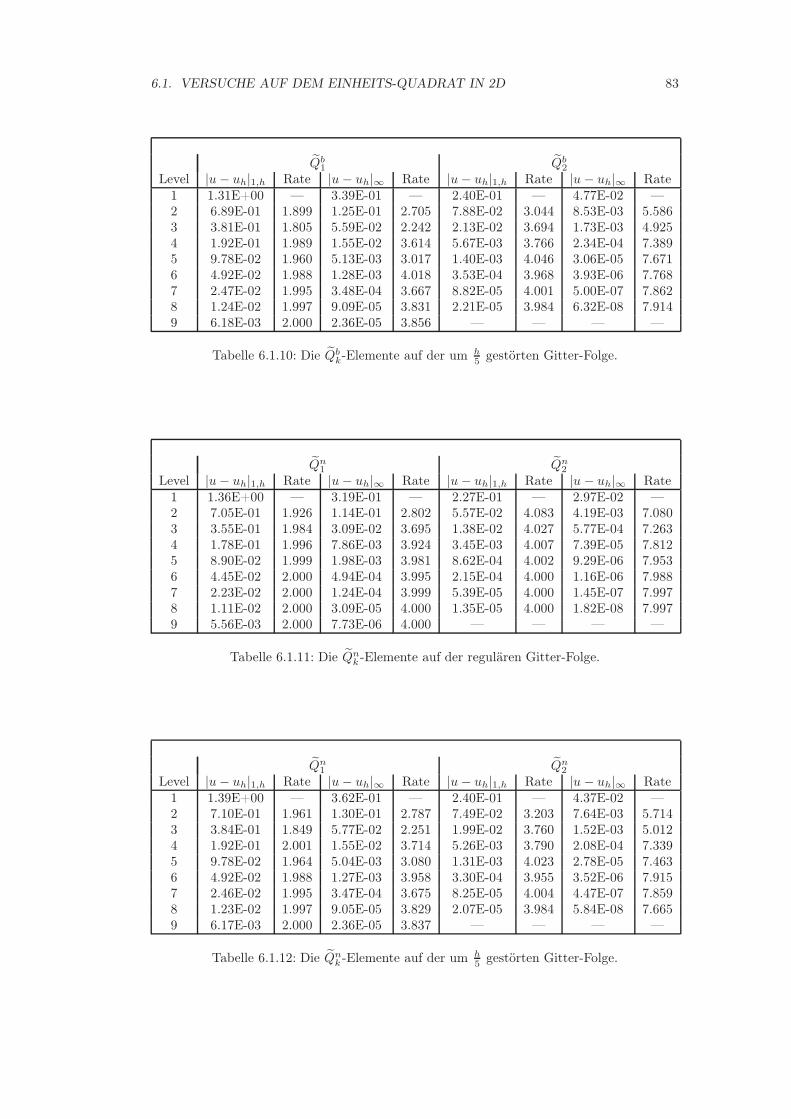
6.1. VERSUCHE AUF DEM EINHEITS-QUADRAT IN 2D 83
Qb1 Qb
2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate1 1.31E+00 — 3.39E-01 — 2.40E-01 — 4.77E-02 —2 6.89E-01 1.899 1.25E-01 2.705 7.88E-02 3.044 8.53E-03 5.5863 3.81E-01 1.805 5.59E-02 2.242 2.13E-02 3.694 1.73E-03 4.9254 1.92E-01 1.989 1.55E-02 3.614 5.67E-03 3.766 2.34E-04 7.3895 9.78E-02 1.960 5.13E-03 3.017 1.40E-03 4.046 3.06E-05 7.6716 4.92E-02 1.988 1.28E-03 4.018 3.53E-04 3.968 3.93E-06 7.7687 2.47E-02 1.995 3.48E-04 3.667 8.82E-05 4.001 5.00E-07 7.8628 1.24E-02 1.997 9.09E-05 3.831 2.21E-05 3.984 6.32E-08 7.9149 6.18E-03 2.000 2.36E-05 3.856 — — — —
Tabelle 6.1.10: Die Qbk-Elemente auf der um h
5 gestörten Gitter-Folge.
Qn1 Qn
2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate1 1.36E+00 — 3.19E-01 — 2.27E-01 — 2.97E-02 —2 7.05E-01 1.926 1.14E-01 2.802 5.57E-02 4.083 4.19E-03 7.0803 3.55E-01 1.984 3.09E-02 3.695 1.38E-02 4.027 5.77E-04 7.2634 1.78E-01 1.996 7.86E-03 3.924 3.45E-03 4.007 7.39E-05 7.8125 8.90E-02 1.999 1.98E-03 3.981 8.62E-04 4.002 9.29E-06 7.9536 4.45E-02 2.000 4.94E-04 3.995 2.15E-04 4.000 1.16E-06 7.9887 2.23E-02 2.000 1.24E-04 3.999 5.39E-05 4.000 1.45E-07 7.9978 1.11E-02 2.000 3.09E-05 4.000 1.35E-05 4.000 1.82E-08 7.9979 5.56E-03 2.000 7.73E-06 4.000 — — — —
Tabelle 6.1.11: Die Qnk -Elemente auf der regulären Gitter-Folge.
Qn1 Qn
2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate1 1.39E+00 — 3.62E-01 — 2.40E-01 — 4.37E-02 —2 7.10E-01 1.961 1.30E-01 2.787 7.49E-02 3.203 7.64E-03 5.7143 3.84E-01 1.849 5.77E-02 2.251 1.99E-02 3.760 1.52E-03 5.0124 1.92E-01 2.001 1.55E-02 3.714 5.26E-03 3.790 2.08E-04 7.3395 9.78E-02 1.964 5.04E-03 3.080 1.31E-03 4.023 2.78E-05 7.4636 4.92E-02 1.988 1.27E-03 3.958 3.30E-04 3.955 3.52E-06 7.9157 2.46E-02 1.995 3.47E-04 3.675 8.25E-05 4.004 4.47E-07 7.8598 1.23E-02 1.997 9.05E-05 3.829 2.07E-05 3.984 5.84E-08 7.6659 6.17E-03 2.000 2.36E-05 3.837 — — — —
Tabelle 6.1.12: Die Qnk -Elemente auf der um h
5 gestörten Gitter-Folge.

84 KAPITEL 6. NUMERISCHE VERSUCHE
6.2 Versuche auf dem Einheits-Würfel in 3DIn diesem Abschnitt wollen wir die numerischen Versuche für die Poisson-Gleichung aus demvorherigen Abschnitt auch in 3D durchführen. Als Gebiet wählen wir den Einheitswürfel
Ω := (0, 1)3,
wobei die gesuchte Lösung u ∈ H10(Ω) sowie die rechte Seite f ∈ L2(Ω) der Poisson-Gleichung
durch
u(x, y, z) = sin(πx) · sin(πy) · sin(πz)f(x, y, z) = 3π2 · sin(πx) · sin(πy) · sin(πz)
gegeben sind. Auch hier ist wieder u ∈ Hk(Ω) für beliebiges k ∈ N.
Wir wollen hierbei drei Gitter-Folgen betrachten, wobei die Konstruktion der ersten bei-den Varianten mit der aus dem zwei-dimensionalen Beispiel übereinstimmt. Hierbei birgtdie gestörte Gitter-Folge – im Gegensatz zu ihrem zwei-dimensionalen Äquivalent – einebesondere Hürde: Ihre Seitenflächen sind nicht mehr planar. Wir wollen daher noch einedritte planar gestörte Gitter-Folge betrachten, dessen Gitter auf Level k ebenfalls durchVerschiebung der inneren Knoten vi ∈ Vh aus dem regulären Gitter auf Level k erzeugtwird, jedoch wird hierbei darauf geachtet, dass die Seitenflächen trotz der Störung planarbleiben, wobei wir jedoch keine affin äquivalente Gitter-Folge erhalten. Für alle drei Gitter-Folgen entspricht die Gitterweite auf Level k gerade
√3 ·2−k, wobei auf den beiden gestörten
Gitter-Folgen kleinere Schwankungen vorbehalten sind.
Zunächst wollen wir wie im zwei-dimensionalen Versuch einige statistische Daten betrachten.In Tabelle 6.2.1 sehen wir, dass das Q1-Element asymptotisch drei mal so viele Freiheits-grade wie das konforme Q1-Element besitzt, während das Q2-Element einen Zuwachs vonlediglich 25% gegenüber dem konformen Q2-Element verzeichnet.
Level Q1 Q1 / Qn1 Q2 Q2 / Qn
2
1 27 36 125 1162 125 240 729 7843 729 1.728 4.913 5.6964 4.913 13.056 35.937 43.2645 35.937 101.376 274.625 336.8966 274.625 798.720 — —
Tabelle 6.2.1: Anzahl der Freiheitsgrade auf jedem Level.
In Tabelle 6.2.2 sehen wir, dass die Anzahl der Matrix-Einträge für das Q1-Element nurgeringfügig größer ist als die des konformen Q1-Elementes, während das Q2-Element sogardeutlich weniger Matrix-Einträge erzeugt als sein konformes Äquivalent.
In Tabelle 6.2.3, Tabelle 6.2.4 und Tabelle 6.2.5 sehen wir, dass die konformen Qk-Elemen-te – genau wie im zwei-dimensionalen Fall – für alle drei Gitter-Folgen eine Reduktions-Rate von 2k bzw. 2k+1 für die H1- bzw. L∞-Fehler liefern, wobei auch hier die Schwan-kungen auf den gestörten Gitter-Folgen wieder im Toleranzbereich liegen. Desweiteren sindauch die absoluten Fehler-Werte für alle drei Gitter-Folgen von der gleichen Größenordnung.
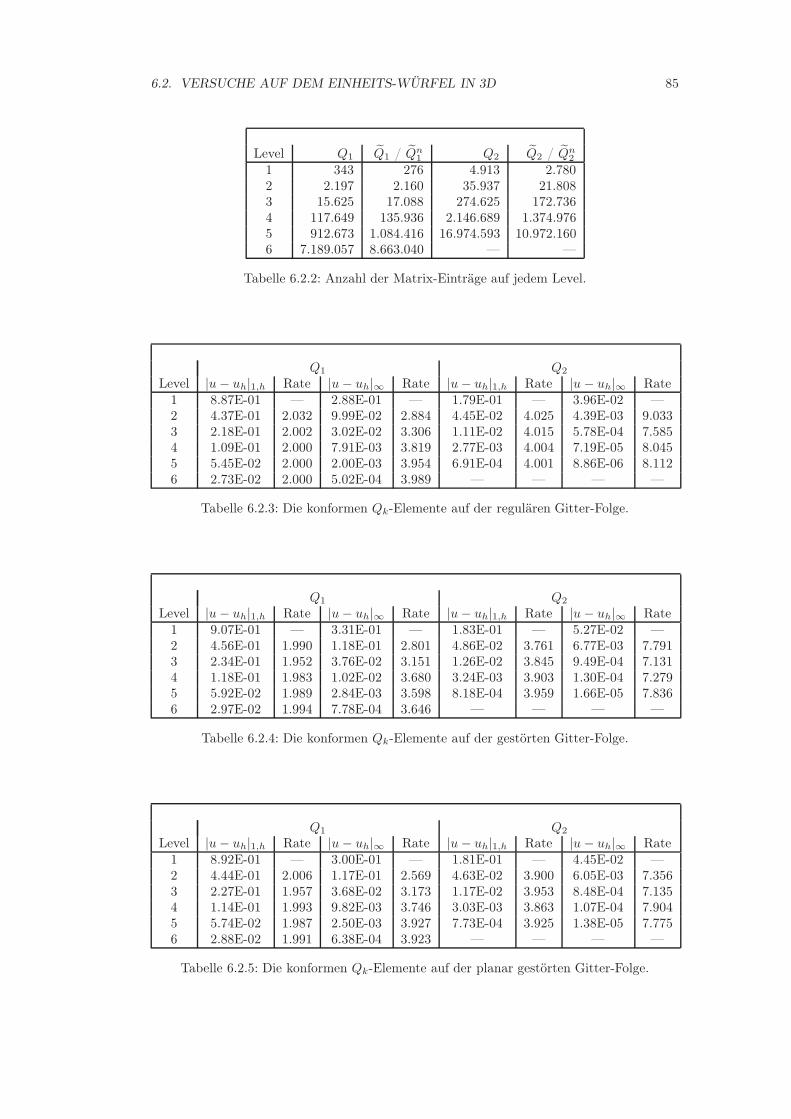
6.2. VERSUCHE AUF DEM EINHEITS-WÜRFEL IN 3D 85
Level Q1 Q1 / Qn1 Q2 Q2 / Qn
2
1 343 276 4.913 2.7802 2.197 2.160 35.937 21.8083 15.625 17.088 274.625 172.7364 117.649 135.936 2.146.689 1.374.9765 912.673 1.084.416 16.974.593 10.972.1606 7.189.057 8.663.040 — —
Tabelle 6.2.2: Anzahl der Matrix-Einträge auf jedem Level.
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate1 8.87E-01 — 2.88E-01 — 1.79E-01 — 3.96E-02 —2 4.37E-01 2.032 9.99E-02 2.884 4.45E-02 4.025 4.39E-03 9.0333 2.18E-01 2.002 3.02E-02 3.306 1.11E-02 4.015 5.78E-04 7.5854 1.09E-01 2.000 7.91E-03 3.819 2.77E-03 4.004 7.19E-05 8.0455 5.45E-02 2.000 2.00E-03 3.954 6.91E-04 4.001 8.86E-06 8.1126 2.73E-02 2.000 5.02E-04 3.989 — — — —
Tabelle 6.2.3: Die konformen Qk-Elemente auf der regulären Gitter-Folge.
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate1 9.07E-01 — 3.31E-01 — 1.83E-01 — 5.27E-02 —2 4.56E-01 1.990 1.18E-01 2.801 4.86E-02 3.761 6.77E-03 7.7913 2.34E-01 1.952 3.76E-02 3.151 1.26E-02 3.845 9.49E-04 7.1314 1.18E-01 1.983 1.02E-02 3.680 3.24E-03 3.903 1.30E-04 7.2795 5.92E-02 1.989 2.84E-03 3.598 8.18E-04 3.959 1.66E-05 7.8366 2.97E-02 1.994 7.78E-04 3.646 — — — —
Tabelle 6.2.4: Die konformen Qk-Elemente auf der gestörten Gitter-Folge.
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate1 8.92E-01 — 3.00E-01 — 1.81E-01 — 4.45E-02 —2 4.44E-01 2.006 1.17E-01 2.569 4.63E-02 3.900 6.05E-03 7.3563 2.27E-01 1.957 3.68E-02 3.173 1.17E-02 3.953 8.48E-04 7.1354 1.14E-01 1.993 9.82E-03 3.746 3.03E-03 3.863 1.07E-04 7.9045 5.74E-02 1.987 2.50E-03 3.927 7.73E-04 3.925 1.38E-05 7.7756 2.88E-02 1.991 6.38E-04 3.923 — — — —
Tabelle 6.2.5: Die konformen Qk-Elemente auf der planar gestörten Gitter-Folge.
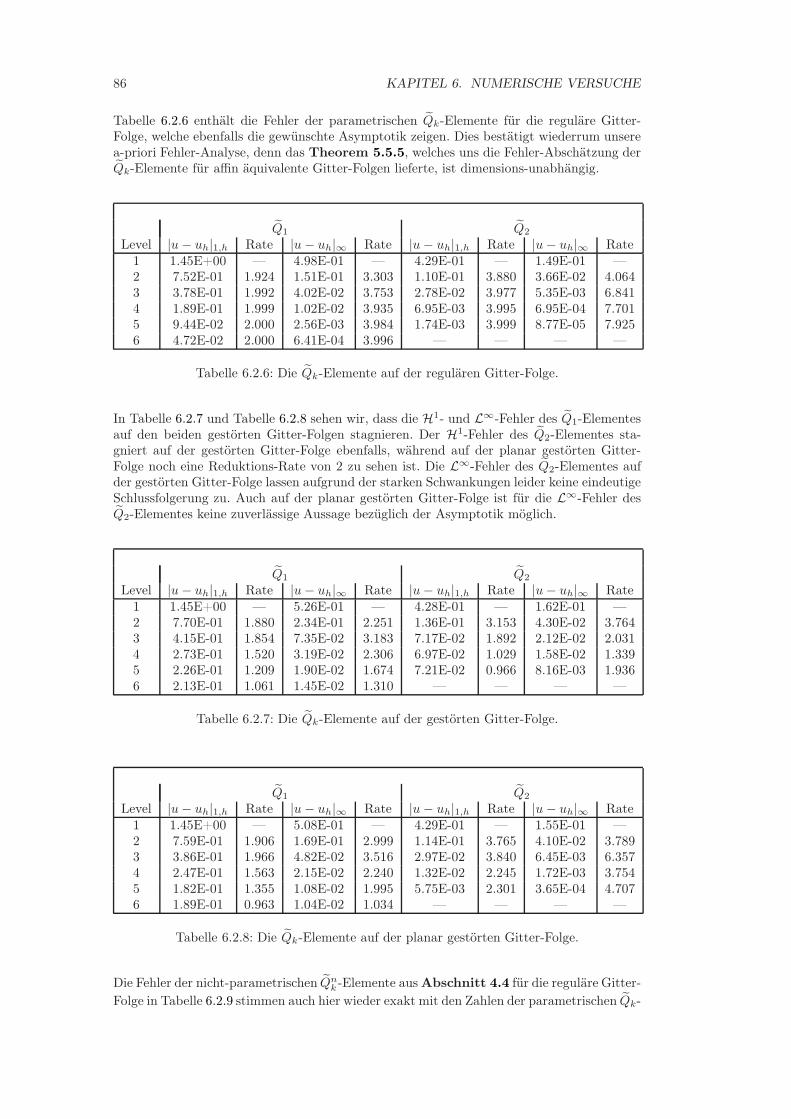
86 KAPITEL 6. NUMERISCHE VERSUCHE
Tabelle 6.2.6 enthält die Fehler der parametrischen Qk-Elemente für die reguläre Gitter-Folge, welche ebenfalls die gewünschte Asymptotik zeigen. Dies bestätigt wiederrum unserea-priori Fehler-Analyse, denn das Theorem 5.5.5, welches uns die Fehler-Abschätzung derQk-Elemente für affin äquivalente Gitter-Folgen lieferte, ist dimensions-unabhängig.
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 1.45E+00 — 4.98E-01 — 4.29E-01 — 1.49E-01 —2 7.52E-01 1.924 1.51E-01 3.303 1.10E-01 3.880 3.66E-02 4.0643 3.78E-01 1.992 4.02E-02 3.753 2.78E-02 3.977 5.35E-03 6.8414 1.89E-01 1.999 1.02E-02 3.935 6.95E-03 3.995 6.95E-04 7.7015 9.44E-02 2.000 2.56E-03 3.984 1.74E-03 3.999 8.77E-05 7.9256 4.72E-02 2.000 6.41E-04 3.996 — — — —
Tabelle 6.2.6: Die Qk-Elemente auf der regulären Gitter-Folge.
In Tabelle 6.2.7 und Tabelle 6.2.8 sehen wir, dass die H1- und L∞-Fehler des Q1-Elementesauf den beiden gestörten Gitter-Folgen stagnieren. Der H1-Fehler des Q2-Elementes sta-gniert auf der gestörten Gitter-Folge ebenfalls, während auf der planar gestörten Gitter-Folge noch eine Reduktions-Rate von 2 zu sehen ist. Die L∞-Fehler des Q2-Elementes aufder gestörten Gitter-Folge lassen aufgrund der starken Schwankungen leider keine eindeutigeSchlussfolgerung zu. Auch auf der planar gestörten Gitter-Folge ist für die L∞-Fehler desQ2-Elementes keine zuverlässige Aussage bezüglich der Asymptotik möglich.
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 1.45E+00 — 5.26E-01 — 4.28E-01 — 1.62E-01 —2 7.70E-01 1.880 2.34E-01 2.251 1.36E-01 3.153 4.30E-02 3.7643 4.15E-01 1.854 7.35E-02 3.183 7.17E-02 1.892 2.12E-02 2.0314 2.73E-01 1.520 3.19E-02 2.306 6.97E-02 1.029 1.58E-02 1.3395 2.26E-01 1.209 1.90E-02 1.674 7.21E-02 0.966 8.16E-03 1.9366 2.13E-01 1.061 1.45E-02 1.310 — — — —
Tabelle 6.2.7: Die Qk-Elemente auf der gestörten Gitter-Folge.
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 1.45E+00 — 5.08E-01 — 4.29E-01 — 1.55E-01 —2 7.59E-01 1.906 1.69E-01 2.999 1.14E-01 3.765 4.10E-02 3.7893 3.86E-01 1.966 4.82E-02 3.516 2.97E-02 3.840 6.45E-03 6.3574 2.47E-01 1.563 2.15E-02 2.240 1.32E-02 2.245 1.72E-03 3.7545 1.82E-01 1.355 1.08E-02 1.995 5.75E-03 2.301 3.65E-04 4.7076 1.89E-01 0.963 1.04E-02 1.034 — — — —
Tabelle 6.2.8: Die Qk-Elemente auf der planar gestörten Gitter-Folge.
Die Fehler der nicht-parametrischen Qnk -Elemente aus Abschnitt 4.4 für die reguläre Gitter-
Folge in Tabelle 6.2.9 stimmen auch hier wieder exakt mit den Zahlen der parametrischen Qk-
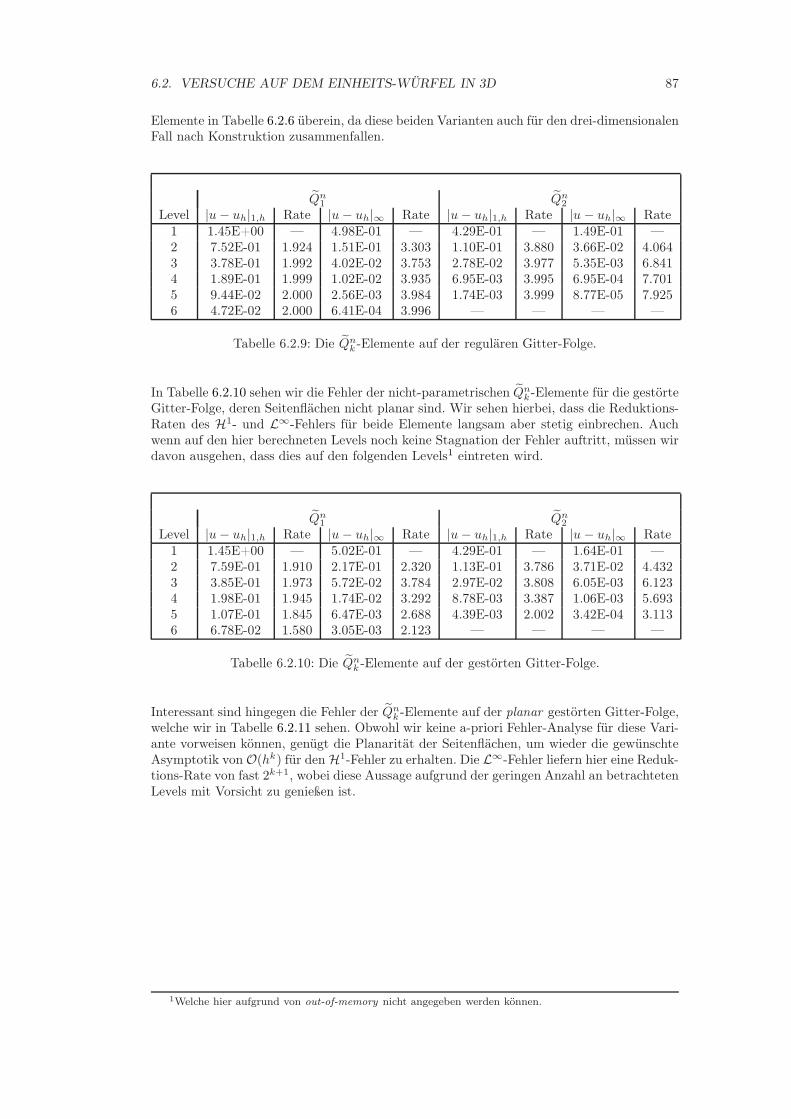
6.2. VERSUCHE AUF DEM EINHEITS-WÜRFEL IN 3D 87
Elemente in Tabelle 6.2.6 überein, da diese beiden Varianten auch für den drei-dimensionalenFall nach Konstruktion zusammenfallen.
Qn1 Qn
2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate1 1.45E+00 — 4.98E-01 — 4.29E-01 — 1.49E-01 —2 7.52E-01 1.924 1.51E-01 3.303 1.10E-01 3.880 3.66E-02 4.0643 3.78E-01 1.992 4.02E-02 3.753 2.78E-02 3.977 5.35E-03 6.8414 1.89E-01 1.999 1.02E-02 3.935 6.95E-03 3.995 6.95E-04 7.7015 9.44E-02 2.000 2.56E-03 3.984 1.74E-03 3.999 8.77E-05 7.9256 4.72E-02 2.000 6.41E-04 3.996 — — — —
Tabelle 6.2.9: Die Qnk -Elemente auf der regulären Gitter-Folge.
In Tabelle 6.2.10 sehen wir die Fehler der nicht-parametrischen Qnk -Elemente für die gestörte
Gitter-Folge, deren Seitenflächen nicht planar sind. Wir sehen hierbei, dass die Reduktions-Raten des H1- und L∞-Fehlers für beide Elemente langsam aber stetig einbrechen. Auchwenn auf den hier berechneten Levels noch keine Stagnation der Fehler auftritt, müssen wirdavon ausgehen, dass dies auf den folgenden Levels1 eintreten wird.
Qn1 Qn
2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate1 1.45E+00 — 5.02E-01 — 4.29E-01 — 1.64E-01 —2 7.59E-01 1.910 2.17E-01 2.320 1.13E-01 3.786 3.71E-02 4.4323 3.85E-01 1.973 5.72E-02 3.784 2.97E-02 3.808 6.05E-03 6.1234 1.98E-01 1.945 1.74E-02 3.292 8.78E-03 3.387 1.06E-03 5.6935 1.07E-01 1.845 6.47E-03 2.688 4.39E-03 2.002 3.42E-04 3.1136 6.78E-02 1.580 3.05E-03 2.123 — — — —
Tabelle 6.2.10: Die Qnk -Elemente auf der gestörten Gitter-Folge.
Interessant sind hingegen die Fehler der Qnk -Elemente auf der planar gestörten Gitter-Folge,
welche wir in Tabelle 6.2.11 sehen. Obwohl wir keine a-priori Fehler-Analyse für diese Vari-ante vorweisen können, genügt die Planarität der Seitenflächen, um wieder die gewünschteAsymptotik vonO(hk) für den H1-Fehler zu erhalten. Die L∞-Fehler liefern hier eine Reduk-tions-Rate von fast 2k+1, wobei diese Aussage aufgrund der geringen Anzahl an betrachtetenLevels mit Vorsicht zu genießen ist.
1Welche hier aufgrund von out-of-memory nicht angegeben werden können.
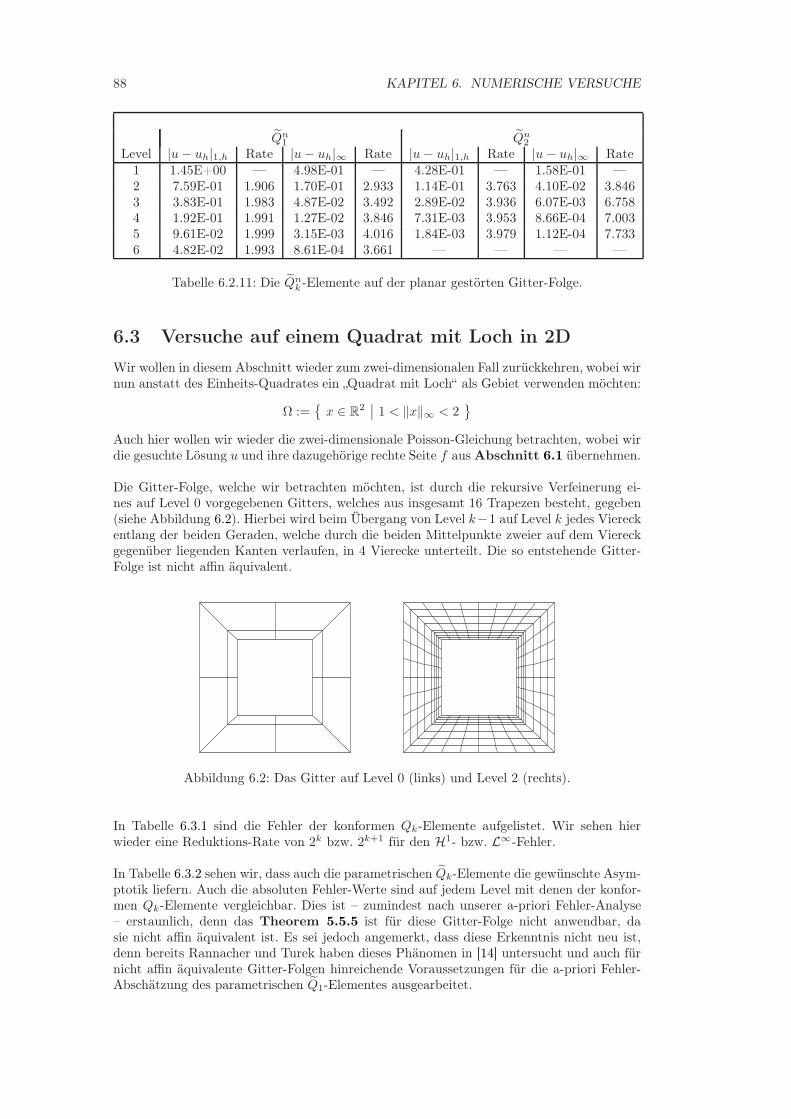
88 KAPITEL 6. NUMERISCHE VERSUCHE
Qn1 Qn
2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 1.45E+00 — 4.98E-01 — 4.28E-01 — 1.58E-01 —2 7.59E-01 1.906 1.70E-01 2.933 1.14E-01 3.763 4.10E-02 3.8463 3.83E-01 1.983 4.87E-02 3.492 2.89E-02 3.936 6.07E-03 6.7584 1.92E-01 1.991 1.27E-02 3.846 7.31E-03 3.953 8.66E-04 7.0035 9.61E-02 1.999 3.15E-03 4.016 1.84E-03 3.979 1.12E-04 7.7336 4.82E-02 1.993 8.61E-04 3.661 — — — —
Tabelle 6.2.11: Die Qnk -Elemente auf der planar gestörten Gitter-Folge.
6.3 Versuche auf einem Quadrat mit Loch in 2DWir wollen in diesem Abschnitt wieder zum zwei-dimensionalen Fall zurückkehren, wobei wirnun anstatt des Einheits-Quadrates ein „Quadrat mit Loch“ als Gebiet verwenden möchten:
Ω :={x ∈ R
2∣∣ 1 < ‖x‖∞ < 2
}Auch hier wollen wir wieder die zwei-dimensionale Poisson-Gleichung betrachten, wobei wirdie gesuchte Lösung u und ihre dazugehörige rechte Seite f aus Abschnitt 6.1 übernehmen.
Die Gitter-Folge, welche wir betrachten möchten, ist durch die rekursive Verfeinerung ei-nes auf Level 0 vorgegebenen Gitters, welches aus insgesamt 16 Trapezen besteht, gegeben(siehe Abbildung 6.2). Hierbei wird beim Übergang von Level k−1 auf Level k jedes Viereckentlang der beiden Geraden, welche durch die beiden Mittelpunkte zweier auf dem Viereckgegenüber liegenden Kanten verlaufen, in 4 Vierecke unterteilt. Die so entstehende Gitter-Folge ist nicht affin äquivalent.
Abbildung 6.2: Das Gitter auf Level 0 (links) und Level 2 (rechts).
In Tabelle 6.3.1 sind die Fehler der konformen Qk-Elemente aufgelistet. Wir sehen hierwieder eine Reduktions-Rate von 2k bzw. 2k+1 für den H1- bzw. L∞-Fehler.
In Tabelle 6.3.2 sehen wir, dass auch die parametrischen Qk-Elemente die gewünschte Asym-ptotik liefern. Auch die absoluten Fehler-Werte sind auf jedem Level mit denen der konfor-men Qk-Elemente vergleichbar. Dies ist – zumindest nach unserer a-priori Fehler-Analyse– erstaunlich, denn das Theorem 5.5.5 ist für diese Gitter-Folge nicht anwendbar, dasie nicht affin äquivalent ist. Es sei jedoch angemerkt, dass diese Erkenntnis nicht neu ist,denn bereits Rannacher und Turek haben dieses Phänomen in [14] untersucht und auch fürnicht affin äquivalente Gitter-Folgen hinreichende Voraussetzungen für die a-priori Fehler-Abschätzung des parametrischen Q1-Elementes ausgearbeitet.
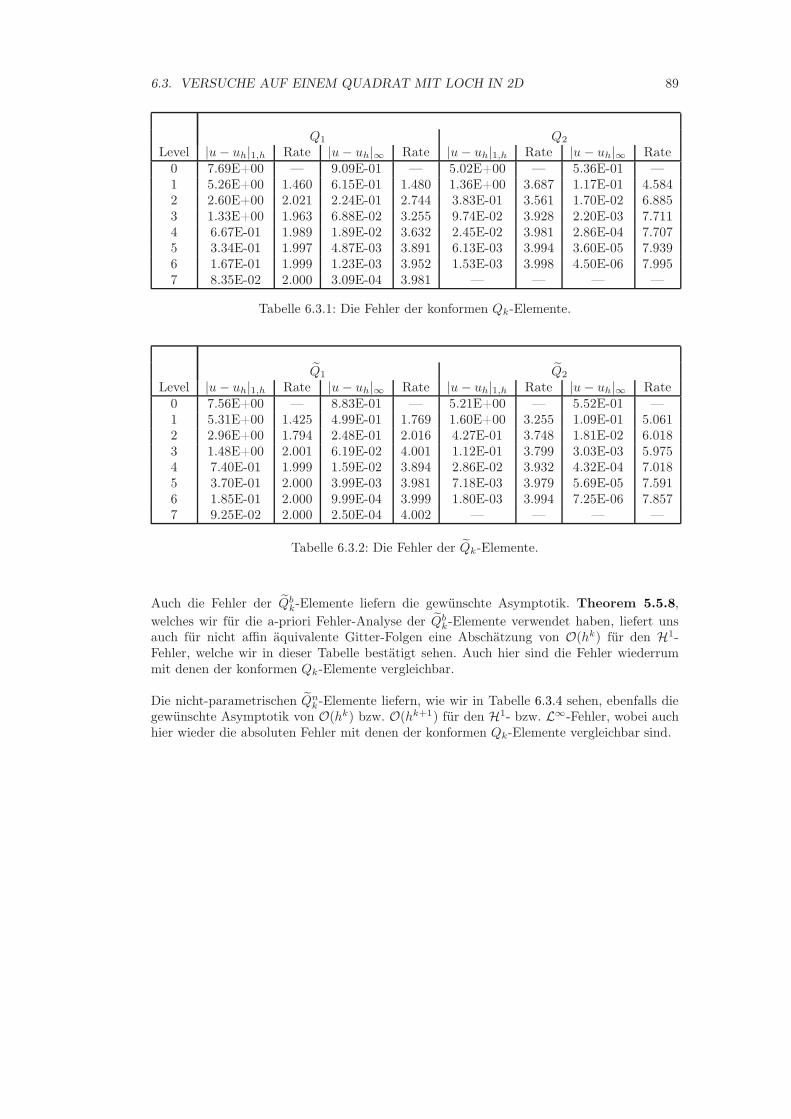
6.3. VERSUCHE AUF EINEM QUADRAT MIT LOCH IN 2D 89
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate0 7.69E+00 — 9.09E-01 — 5.02E+00 — 5.36E-01 —1 5.26E+00 1.460 6.15E-01 1.480 1.36E+00 3.687 1.17E-01 4.5842 2.60E+00 2.021 2.24E-01 2.744 3.83E-01 3.561 1.70E-02 6.8853 1.33E+00 1.963 6.88E-02 3.255 9.74E-02 3.928 2.20E-03 7.7114 6.67E-01 1.989 1.89E-02 3.632 2.45E-02 3.981 2.86E-04 7.7075 3.34E-01 1.997 4.87E-03 3.891 6.13E-03 3.994 3.60E-05 7.9396 1.67E-01 1.999 1.23E-03 3.952 1.53E-03 3.998 4.50E-06 7.9957 8.35E-02 2.000 3.09E-04 3.981 — — — —
Tabelle 6.3.1: Die Fehler der konformen Qk-Elemente.
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate0 7.56E+00 — 8.83E-01 — 5.21E+00 — 5.52E-01 —1 5.31E+00 1.425 4.99E-01 1.769 1.60E+00 3.255 1.09E-01 5.0612 2.96E+00 1.794 2.48E-01 2.016 4.27E-01 3.748 1.81E-02 6.0183 1.48E+00 2.001 6.19E-02 4.001 1.12E-01 3.799 3.03E-03 5.9754 7.40E-01 1.999 1.59E-02 3.894 2.86E-02 3.932 4.32E-04 7.0185 3.70E-01 2.000 3.99E-03 3.981 7.18E-03 3.979 5.69E-05 7.5916 1.85E-01 2.000 9.99E-04 3.999 1.80E-03 3.994 7.25E-06 7.8577 9.25E-02 2.000 2.50E-04 4.002 — — — —
Tabelle 6.3.2: Die Fehler der Qk-Elemente.
Auch die Fehler der Qbk-Elemente liefern die gewünschte Asymptotik. Theorem 5.5.8,
welches wir für die a-priori Fehler-Analyse der Qbk-Elemente verwendet haben, liefert uns
auch für nicht affin äquivalente Gitter-Folgen eine Abschätzung von O(hk) für den H1-Fehler, welche wir in dieser Tabelle bestätigt sehen. Auch hier sind die Fehler wiederrummit denen der konformen Qk-Elemente vergleichbar.
Die nicht-parametrischen Qnk -Elemente liefern, wie wir in Tabelle 6.3.4 sehen, ebenfalls die
gewünschte Asymptotik von O(hk) bzw. O(hk+1) für den H1- bzw. L∞-Fehler, wobei auchhier wieder die absoluten Fehler mit denen der konformen Qk-Elemente vergleichbar sind.
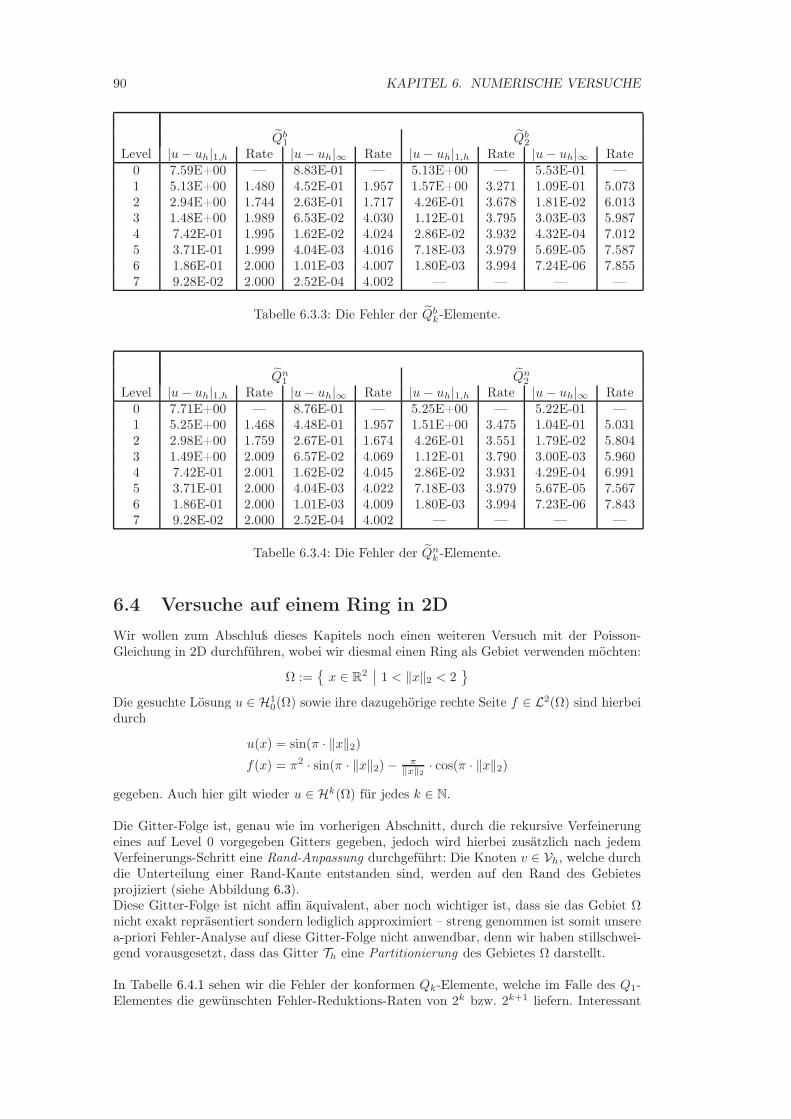
90 KAPITEL 6. NUMERISCHE VERSUCHE
Qb1 Qb
2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate0 7.59E+00 — 8.83E-01 — 5.13E+00 — 5.53E-01 —1 5.13E+00 1.480 4.52E-01 1.957 1.57E+00 3.271 1.09E-01 5.0732 2.94E+00 1.744 2.63E-01 1.717 4.26E-01 3.678 1.81E-02 6.0133 1.48E+00 1.989 6.53E-02 4.030 1.12E-01 3.795 3.03E-03 5.9874 7.42E-01 1.995 1.62E-02 4.024 2.86E-02 3.932 4.32E-04 7.0125 3.71E-01 1.999 4.04E-03 4.016 7.18E-03 3.979 5.69E-05 7.5876 1.86E-01 2.000 1.01E-03 4.007 1.80E-03 3.994 7.24E-06 7.8557 9.28E-02 2.000 2.52E-04 4.002 — — — —
Tabelle 6.3.3: Die Fehler der Qbk-Elemente.
Qn1 Qn
2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate0 7.71E+00 — 8.76E-01 — 5.25E+00 — 5.22E-01 —1 5.25E+00 1.468 4.48E-01 1.957 1.51E+00 3.475 1.04E-01 5.0312 2.98E+00 1.759 2.67E-01 1.674 4.26E-01 3.551 1.79E-02 5.8043 1.49E+00 2.009 6.57E-02 4.069 1.12E-01 3.790 3.00E-03 5.9604 7.42E-01 2.001 1.62E-02 4.045 2.86E-02 3.931 4.29E-04 6.9915 3.71E-01 2.000 4.04E-03 4.022 7.18E-03 3.979 5.67E-05 7.5676 1.86E-01 2.000 1.01E-03 4.009 1.80E-03 3.994 7.23E-06 7.8437 9.28E-02 2.000 2.52E-04 4.002 — — — —
Tabelle 6.3.4: Die Fehler der Qnk -Elemente.
6.4 Versuche auf einem Ring in 2DWir wollen zum Abschluß dieses Kapitels noch einen weiteren Versuch mit der Poisson-Gleichung in 2D durchführen, wobei wir diesmal einen Ring als Gebiet verwenden möchten:
Ω :={x ∈ R
2∣∣ 1 < ‖x‖2 < 2
}Die gesuchte Lösung u ∈ H1
0(Ω) sowie ihre dazugehörige rechte Seite f ∈ L2(Ω) sind hierbeidurch
u(x) = sin(π · ‖x‖2)f(x) = π2 · sin(π · ‖x‖2)− π
‖x‖2· cos(π · ‖x‖2)
gegeben. Auch hier gilt wieder u ∈ Hk(Ω) für jedes k ∈ N.
Die Gitter-Folge ist, genau wie im vorherigen Abschnitt, durch die rekursive Verfeinerungeines auf Level 0 vorgegeben Gitters gegeben, jedoch wird hierbei zusätzlich nach jedemVerfeinerungs-Schritt eine Rand-Anpassung durchgeführt: Die Knoten v ∈ Vh, welche durchdie Unterteilung einer Rand-Kante entstanden sind, werden auf den Rand des Gebietesprojiziert (siehe Abbildung 6.3).Diese Gitter-Folge ist nicht affin äquivalent, aber noch wichtiger ist, dass sie das Gebiet Ωnicht exakt repräsentiert sondern lediglich approximiert – streng genommen ist somit unserea-priori Fehler-Analyse auf diese Gitter-Folge nicht anwendbar, denn wir haben stillschwei-gend vorausgesetzt, dass das Gitter Th eine Partitionierung des Gebietes Ω darstellt.
In Tabelle 6.4.1 sehen wir die Fehler der konformen Qk-Elemente, welche im Falle des Q1-Elementes die gewünschten Fehler-Reduktions-Raten von 2k bzw. 2k+1 liefern. Interessant
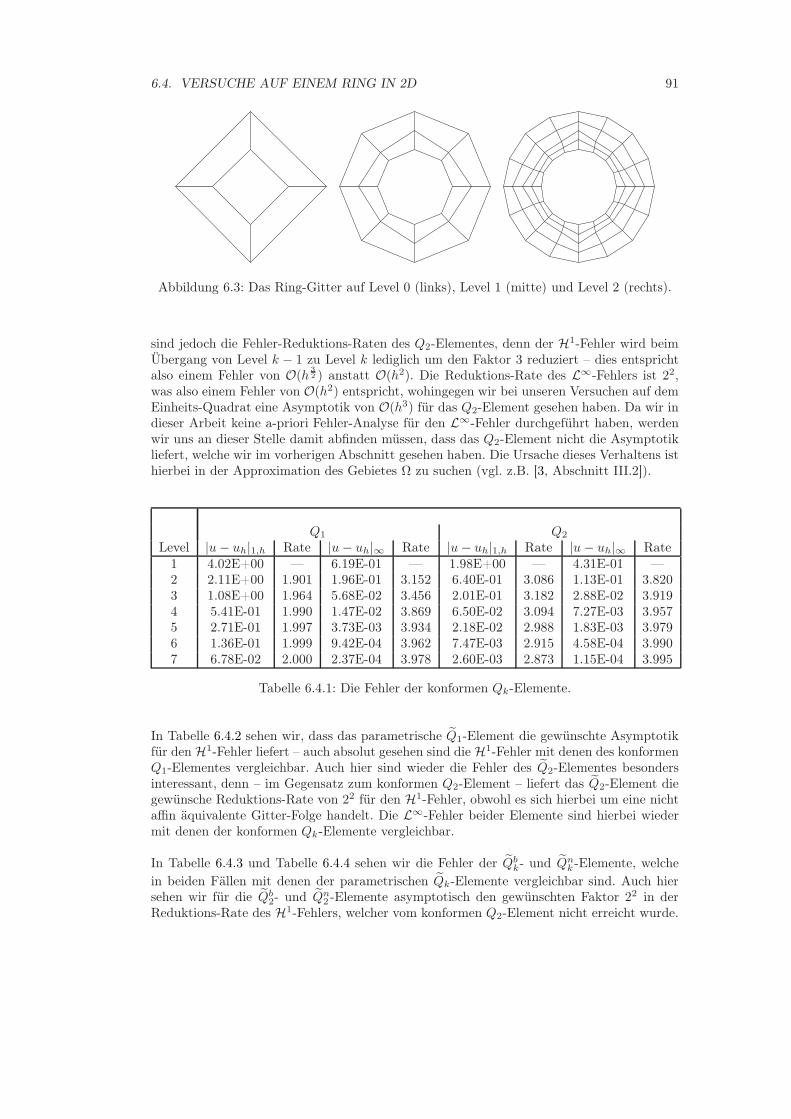
6.4. VERSUCHE AUF EINEM RING IN 2D 91
Abbildung 6.3: Das Ring-Gitter auf Level 0 (links), Level 1 (mitte) und Level 2 (rechts).
sind jedoch die Fehler-Reduktions-Raten des Q2-Elementes, denn der H1-Fehler wird beimÜbergang von Level k − 1 zu Level k lediglich um den Faktor 3 reduziert – dies entsprichtalso einem Fehler von O(h 3
2 ) anstatt O(h2). Die Reduktions-Rate des L∞-Fehlers ist 22,was also einem Fehler von O(h2) entspricht, wohingegen wir bei unseren Versuchen auf demEinheits-Quadrat eine Asymptotik von O(h3) für das Q2-Element gesehen haben. Da wir indieser Arbeit keine a-priori Fehler-Analyse für den L∞-Fehler durchgeführt haben, werdenwir uns an dieser Stelle damit abfinden müssen, dass das Q2-Element nicht die Asymptotikliefert, welche wir im vorherigen Abschnitt gesehen haben. Die Ursache dieses Verhaltens isthierbei in der Approximation des Gebietes Ω zu suchen (vgl. z.B. [3, Abschnitt III.2]).
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u − uh|∞ Rate1 4.02E+00 — 6.19E-01 — 1.98E+00 — 4.31E-01 —2 2.11E+00 1.901 1.96E-01 3.152 6.40E-01 3.086 1.13E-01 3.8203 1.08E+00 1.964 5.68E-02 3.456 2.01E-01 3.182 2.88E-02 3.9194 5.41E-01 1.990 1.47E-02 3.869 6.50E-02 3.094 7.27E-03 3.9575 2.71E-01 1.997 3.73E-03 3.934 2.18E-02 2.988 1.83E-03 3.9796 1.36E-01 1.999 9.42E-04 3.962 7.47E-03 2.915 4.58E-04 3.9907 6.78E-02 2.000 2.37E-04 3.978 2.60E-03 2.873 1.15E-04 3.995
Tabelle 6.4.1: Die Fehler der konformen Qk-Elemente.
In Tabelle 6.4.2 sehen wir, dass das parametrische Q1-Element die gewünschte Asymptotikfür den H1-Fehler liefert – auch absolut gesehen sind die H1-Fehler mit denen des konformenQ1-Elementes vergleichbar. Auch hier sind wieder die Fehler des Q2-Elementes besondersinteressant, denn – im Gegensatz zum konformen Q2-Element – liefert das Q2-Element diegewünsche Reduktions-Rate von 22 für den H1-Fehler, obwohl es sich hierbei um eine nichtaffin äquivalente Gitter-Folge handelt. Die L∞-Fehler beider Elemente sind hierbei wiedermit denen der konformen Qk-Elemente vergleichbar.
In Tabelle 6.4.3 und Tabelle 6.4.4 sehen wir die Fehler der Qbk- und Qn
k -Elemente, welchein beiden Fällen mit denen der parametrischen Qk-Elemente vergleichbar sind. Auch hiersehen wir für die Qb
2- und Qn2 -Elemente asymptotisch den gewünschten Faktor 22 in der
Reduktions-Rate des H1-Fehlers, welcher vom konformen Q2-Element nicht erreicht wurde.
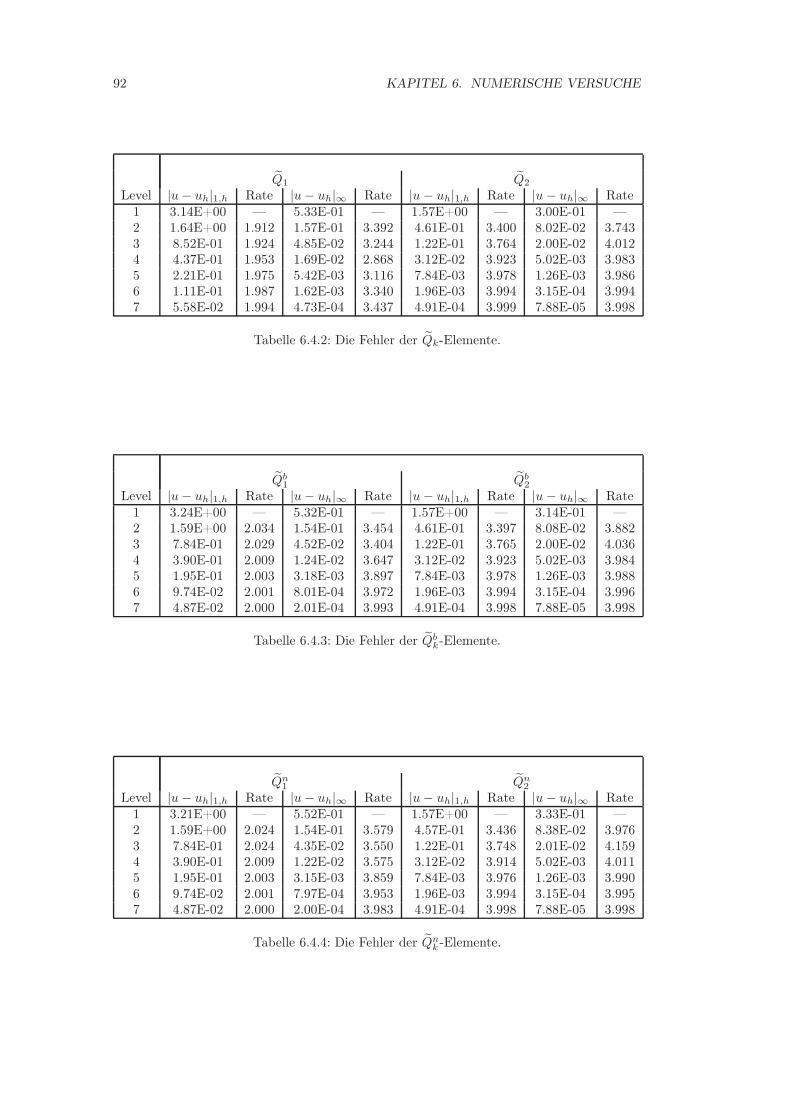
92 KAPITEL 6. NUMERISCHE VERSUCHE
Q1 Q2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 3.14E+00 — 5.33E-01 — 1.57E+00 — 3.00E-01 —2 1.64E+00 1.912 1.57E-01 3.392 4.61E-01 3.400 8.02E-02 3.7433 8.52E-01 1.924 4.85E-02 3.244 1.22E-01 3.764 2.00E-02 4.0124 4.37E-01 1.953 1.69E-02 2.868 3.12E-02 3.923 5.02E-03 3.9835 2.21E-01 1.975 5.42E-03 3.116 7.84E-03 3.978 1.26E-03 3.9866 1.11E-01 1.987 1.62E-03 3.340 1.96E-03 3.994 3.15E-04 3.9947 5.58E-02 1.994 4.73E-04 3.437 4.91E-04 3.999 7.88E-05 3.998
Tabelle 6.4.2: Die Fehler der Qk-Elemente.
Qb1 Qb
2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 3.24E+00 — 5.32E-01 — 1.57E+00 — 3.14E-01 —2 1.59E+00 2.034 1.54E-01 3.454 4.61E-01 3.397 8.08E-02 3.8823 7.84E-01 2.029 4.52E-02 3.404 1.22E-01 3.765 2.00E-02 4.0364 3.90E-01 2.009 1.24E-02 3.647 3.12E-02 3.923 5.02E-03 3.9845 1.95E-01 2.003 3.18E-03 3.897 7.84E-03 3.978 1.26E-03 3.9886 9.74E-02 2.001 8.01E-04 3.972 1.96E-03 3.994 3.15E-04 3.9967 4.87E-02 2.000 2.01E-04 3.993 4.91E-04 3.998 7.88E-05 3.998
Tabelle 6.4.3: Die Fehler der Qbk-Elemente.
Qn1 Qn
2
Level |u− uh|1,h Rate |u− uh|∞ Rate |u− uh|1,h Rate |u− uh|∞ Rate1 3.21E+00 — 5.52E-01 — 1.57E+00 — 3.33E-01 —2 1.59E+00 2.024 1.54E-01 3.579 4.57E-01 3.436 8.38E-02 3.9763 7.84E-01 2.024 4.35E-02 3.550 1.22E-01 3.748 2.01E-02 4.1594 3.90E-01 2.009 1.22E-02 3.575 3.12E-02 3.914 5.02E-03 4.0115 1.95E-01 2.003 3.15E-03 3.859 7.84E-03 3.976 1.26E-03 3.9906 9.74E-02 2.001 7.97E-04 3.953 1.96E-03 3.994 3.15E-04 3.9957 4.87E-02 2.000 2.00E-04 3.983 4.91E-04 3.998 7.88E-05 3.998
Tabelle 6.4.4: Die Fehler der Qnk -Elemente.
Kapitel 7
Abschluß
In dieser Arbeit haben wir ausgehend von einer kurzen Einführung in die Theorie der So-bolev-Räume anhand praktisch sowie theoretisch veranlagter Überlegungen die (zunächstkonforme) Methode der Finiten Elemente hergeleitet. Im Anschluß haben wir die Konstruk-tion allgemeiner Ansatz-Räume mit Hilfe der Knotenfunktionale und des lokalen Spannsvorgestellt, sowie den vor allem in der Praxis beliebten Spezialfall der parametrischen An-satz-Räume betrachtet.
Mit diesen Vorarbeiten haben wir drei Varianten eines nicht-konformen Ansatz-Raumesbeliebig hoher Ordnung formuliert. Hierbei haben wir zunächst eine parametrische Stan-dard-Variante vorgestellt und diese anschließend für die Fälle k ∈ {1, 2} um zusätzlicheBubble-Funktionale ergänzt, so dass die für den Referenz-Spann gewünschte Teilraum-Be-ziehung Qn
k ⊆ S erfüllt wird. Darüber hinaus haben wir die Konstruktionsweise einer nicht-parametrischen Variante vorgestellt.
Im Hinblick auf die a-priori Fehler-Analyse haben wir zunächst das Berger-Scott-Strang-Lemma formuliert, welches eine für nicht-konforme Ansatz-Räume geeignete Verallgemeine-rung des Céa-Lemmas darstellte und uns die getrennte Untersuchung der Diskretisierungs-und Konsistenz-Fehler erlaubte. Ausgehend von der Poincaré-Ungleichung haben wir dasBramble-Hilbert-Lemma hergeleitet, mit welchem wir ein wichtiges Hilfsmittel für die wei-tere Analyse erhalten haben.
Für die Abschätzung des Diskretisierungs-Fehlers haben wir uns auf den Fall der para-metrischen Ansatz-Räume beschränkt, was es uns erlaubte, die Voraussetzungen für eineFehler-Abschätzung vom Typ O(hk) auf drei einfach zu überprüfende Eigenschaften derGitter-Folge sowie des darauf definierten Ansatz-Raumes zurückzuführen. Wir haben denKonsistenz-Fehler für die Poisson-Gleichung näher untersucht und dabei schrittweise die fürdie Fehler-Abschätzung notwendigen Voraussetzungen ausgearbeitet.
Wir haben uns bei der a-priori Fehler-Analyse nicht auf die Qk-Elemente eingeschränkt,sondern diese wesentlich allgemeiner durchgeführt, so dass wir die Fehler-Abschätzungenfür die Qk- und Qb
k-Elemente als Spezialfall aus der zuvor ausgearbeiteten Theorie erhaltenhaben.
Im Anschluß haben wir die aus der Theorie erhaltenen Fehler-Abschätzungen für die nicht-konformen Qk-Elemente in einer Reihe von numerischen Versuchen mit der Poisson-Glei-chung auf unterschiedlichen Gebieten und Gitter-Folgen verifizert und die Daten mit denkonformen Qk-Elementen verglichen.
93
94 KAPITEL 7. ABSCHLU�
7.1 Ausblick: Die Zukunft der Qk-ElementeMit der in dieser Arbeit vorgestellten a-priori Fehler-Analyse ist der Fall affin äquivalenterGitter-Folgen aus theoretischer Sicht weitestgehend abgeschlossen, denn wir haben schon fürdie parametrische Standard-Variante des Qk-Elementes eine Fehler-Abschätzung von O(hk)in der gebrochenen H1-Norm nachweisen können.
Auch nach über 25 Jahren Forschung seit der erstmaligen Formulierung der Elemente vonBrezzi et al. und den darauf folgenden Weiterentwicklungen ist die Frage nach dem asym-ptotischen Verhalten der Approximationsgüte für nicht affin äquivalente Gitter-Folgen nichtvollständig geklärt. Zwar haben wir mit den Qb
k-Elementen eine Variante vorgestellt, wel-che im zwei-dimensionalen Fall auch auf Gitter-Folgen mit stark verzerrten Zellen ebenfallsdie optimale Asymptotik von O(hk) zeigt, allerdings ist nicht abschließend geklärt, ob, undwenn ja, wie die Knotenfunktionale für den Fall k ≥ 3 gewählt werden können, um einenunisolventen Ansatz-Raum zu erhalten.
Eine aus praktischer Sicht relevante Problematik der Qbk-Elemente ist die starke Zunahme
an Freiheitsgraden gegenüber den Qk-Elementen, denn es müssen mit steigendem k immermehr neue Basisfunktionen in den Referenz-Spann hinzugefügt werden, damit der Qn
k alsTeilraum enthalten ist. Im drei-dimensionalen Fall wird die Problematik noch weiter ver-schärft: Für das Qb
2-Element müssen schon 11 neue Basisfunktionen zum Referenz-Spanndes Q2-Elementes hinzugefügt werden – im zwei-dimensionalen Fall war es nur eine einzige.Aus diesen Gründen ist davon auszugehen, dass die Qb
k-Elemente auch in Zukunft lediglichfür n = 2 und „moderates“ k für den praktischen Einsatz von Interesse sein werden.
In der Praxis werden, wie in unseren letzten beiden numerischen Versuchen, überwiegendGitter-Folgen betrachtet, welche durch die rekursive Verfeinerung eines Grob-Gitters gege-ben sind, und hier haben wir selbst für das parametrische Qk-Element eine Asymptotikvon O(hk) für den H1-Fehler gesehen. Zwar sind unsere numerischen Versuche auf gestörtenGitter-Folgen somit als „Stress-Test“ anzusehen, jedoch werden beispielsweise bei der Gitter-Deformation eben solche Störungen auf jedem Level einer Gitter-Folge erzeugt, womit dieseVersuche ein durchaus praktisch relevantes Szenario darstellen. Wir haben hierbei gesehen,dass selbst das nicht-parametrische Qn
k -Element auf drei-dimensionalen Gitter-Folgen mitnicht-planaren Seitenflächen keine optimale Asymptotik zeigt, obwohl sich diese Variante inallen anderen Versuchen als äußerst robust erwiesen hat.
Eine besondere Herausforderung stellt der Konsistenz-Fehler dar. Wir haben in unserenAnalysen vorausgesetzt, dass die Seitenflächen des Gitters planar sind, um die Abschätzungdes Konsistenz-Fehlers durchführen zu können, jedoch ist die Planarität der Seitenflächenfür n ≥ 3 eine sehr starke Forderung. Bis heute ist die Frage, ob, und wenn ja, wie dieKnotenfunktionale der Qk-Elemente so konstruiert werden können, dass auch für den Fallnicht-planarer Seitenflächen eine Abschätzung des Konsistenz-Fehlers möglich ist, noch voll-kommen offen.

Literaturverzeichnis
[1] G. Strang, G.J. Fix: An Analysis of the Finite Element Method ; 1. Auflage, Prentice-Hall, 1973, ISBN 0-130-32946-0
[2] P.G. Ciarlet: The Finite Element Method for Elliptic Problems ; 1. Auflage, North-Holland, 1978, ISBN 0-444-85028-7
[3] D. Braess: Finite Elemente: Theorie, schnelle Löser und Anwendungen in der Elasti-zitätstheorie; 3. Auflage, Springer, 2003, ISBN 3-540-00122-0
[4] H.W. Alt: Lineare Funktionalanalysis ; 5. Auflage, Springer, 2006, ISBN 3-540-34186-2
[5] D. Werner: Funktionalanalysis ; 6. Auflage, Springer, 2007, ISBN 978-3-50-72533-6
[6] L.C. Evans: Partial Differential Equations ; 1. Auflage, American Mathematical Society,1998, ISBN 0-821-80772-2
[7] J. Jost; Partial Differential Equations ; 1. Auflage, Springer, 2002, ISBN 0-387-95428-7
[8] H. Heuser: Lehrbuch der Analysis - Teil 2 ; 13. Auflage, Teubner, 2004, ISBN 3-519-62232-7
[9] C.B. Morrey: Multiple Integrals in the Calculus of Variations; 1. Auflage, Springer,1966, ISBN 3-540-03524-9
[10] B. Schweizer: Partielle Differentialgleichungen; Skript zur Vorlesung an der Techni-schen Universität Dortmund im Wintersemester 2007/08
[11] B. Schweizer: Nichtlineare Partielle Differentialgleichungen; Skript zur Vorlesung ander Technischen Universität Dortmund im Wintersemester 2008/09
[12] R. Rannacher: Einführung in die Numerische Mathematik ; Vorlesungsskriptum SoSe2005, Institut für Angewandte Mathematik, Universität Heidelberg
[13] M. Köster, A. Ouazzi, F. Schieweck, S. Turek, P. Zajac: New robust noncon-forming finite elements of higher order ; Ergebnisberichte des Instituts für AngewandteMathematik, Nummer 418, Fakultät für Mathematik, TU Dortmund, 2011
[14] R. Rannacher, S. Turek: Simple Nonconforming Quadrilateral Stokes Element ; Nu-merical Methods for Partial Differential Equations, Volume 8 (1992), pp. 97-111
[15] J.-P. Hennart, J. Jaffré, J.E. Roberts: A Constructive Method for Deriving FiniteElements of Nodal Type; Numerische Mathematik, Volume 53 (1988), pp. 701-738
[16] M. Bebendorf: A Note on the Poincaré Inequality for Convex Domains ; Journal forAnalysis and its Applications, Volume 22 (2003), pp. 751-756
[17] J.H. Bramble, S.R. Hilbert: Estamination of linear functionals on Sobolev Spaceswith application to Fourier Transforms and Spline Interpolation; SIAM J. Numer. Anal.,Volume 7 (1970), pp. 112-124
95
96 LITERATURVERZEICHNIS
[18] P.G. Ciarlet, P.-A. Raviart: Interpolation theory over curved elements with appli-cations to finite element methods ; Computer Methods in applied Mechanics and Engi-neering, Volume 1 (1972), pp. 217-249
[19] D.N. Arnold, D. Boffi, R.S. Falk: Approximation by Quadrilateral Finite Ele-ments ; Mathematics of Computation, Volume 71 (2002), pp. 909-922
[20] M. Crouzeix, P.-A. Raviart: Conforming and Nonconforming Finite Element Me-thods for solving the stationary Stokes equations I ; RAIRO, Volume 3 (1973), pp. 33-76
[21] G. Matthies: Inf-Sup stable Nonconforming Finite Elements of higher order on Qua-drilaterals and Hexahedra; Mathematical Modelling and Numerical Analysis, Volume 41(2007), pp. 885 - 874
[22] F. Brezzi, J. Douglas, L.D. Marini: Two Families of Mixed Finite Elements forSecond Order Elliptic Problems ; Numerische Mathematik, Volume 47 (1985), pp. 217-235