Embed Size (px)
Citation preview

Non-Fully Symmetric Space-Time MaternCovariance Functions
Tonglin Zhang ∗and Hao Zhang†
Purdue University
Abstract
The problem of nonseparable space-time covariance functions is essential and difficultin spatiotemporal data analysis. Considering that a fully symmetric space-time covariancefunction is inappropriate for many spatiotemporal processes, this article provides a wayto construct a non-fully symmetric nonseparable space-time correlation function from anygiven marginal spatial Matern and marginal temporal Matern correlation functions. Usingthe relationship between a spatial Matern correlation function and the characteristic functionof a multivariate t-distribution, a modification of Bochner’s representation is provided and anon-fully symmetric space-time Matern model is obtained.
KEYWORDS: Bochner’s representation; Characteristic functions; Multivariate t-distributions;
Non-fully symmetric space-time correlation functions; Space-time Matern model.
1 Introduction
For a second-order stationary spatiotemporal process Y (s, t), s ∈ Rd and t ∈ R, its covariance
function,
C(h, u) = Cov(Y (s, t), Y (s+ h, t+ u)),h ∈ Rd, u ∈ R,
is essential to prediction and estimation. A space-time covariance function C is called fully sym-
metric (Gneiting, 2002) if
C(h, u) = C(−h, u) = C(h,−u) = C(−h,−u), ∀ h ∈ Rd, u ∈ R. (1)
∗Department of Statistics, Purdue University, 250 North University Street, West Lafayette, IN 47907-2066,Email: [email protected]
†Department of Statistics, Purdue University, 250 North University Street, West Lafayette, IN 47907-2066,Email: [email protected]
1
In the purely spatial context, this property is also known as axial symmetry (Scaccia and Martin,
2005). Since it has been pointed out by Gneiting (2002) that (1) is often violated when environ-
mental processes are considered dynamically, it is more appropriate to use non-fully symmetric
space-time covariance functions in applications.
A space-time covariance function is a spatial covariance function if time is ignored or a temporal
covariance function if space is ignored. If time is not involved, a great interest is to consider the
Matern family of spatial correlation functions as
Md(h|ν, a) =(a∥h∥)ν
2ν−1Γ(ν)Kν(a∥h∥)
=Mν(a∥h∥),h ∈ Rd, a, ν > 0,
(2)
where Kν is a modified Bessel function of the second kind, a and ν are scale and smoothness
parameters respectively, and Mν(z) = |z|νKν(z)/[2ν−1Γ(ν)], z ∈ R. The Matern family is isotropic
in space. It was proposed by Matern (1986) and has received more attention since some theoretical
work by Handcock and Stein (1993) and Stein (1999). A nice review and discussion on Matern
family is given by Guttorp and Gneiting (2006). The Matern spatial correlation family has been
used in many applications (Lee and Shaddick, 2010; North, Wang, and Genton, 2011).
An isotropic correlation function is inappropriate in modeling a spatiotemporal process since
the temporal axis and the spatial axis are of different scales and the Euclidean distance in the
product space in not suitable. The construction of space-time correlation functions is an interesting
but difficult problem. There have been good developments in recent years on the construction of
space-time correlation functions. The simplest case is the separable one provided by the product
of a spatial correlation function and a temporal correlation function, but it does not model the
space-time interaction (Cressie and Huang, 1999; Stein, 2005) and also too restrictive for space-
time data analysis. A more detailed discussion of the shortcomings of separable models can be
found in Kyriakidis and Journel (1999).
Recently, much effort has been put on the construction of nonseparable space-time covariance
functions. Many models have been proposed. Examples include the product-sum model (De Iaco,
Myers, and Posa, 2001), the mixture models (Ma, 2002, 2003b), and anisotropic spatial component
models (Mateu, Porcu, and Gregori, 2008; Porcu, Gregori, and Mateu, 2006; Porcu, Mateu, and
Saura, 2008). In the construction of these models, many methods have been proposed. Examples
include the spectral representation method (Cressie and Huang, 1999; Stein, 2005), the completely
2
monotone function method (Gneiting, 2002), the linear combination method (Ma, 2005), the
convolution-based method (Rodrigues and Diggle, 2010), the stochastic different equation method
(Kolovos, et. al, 2004), and the mixture representation method (Fonseca and Steel, 2011). There
have been a number of studies on the properties of space-time correlation functions, including,
for example, the test for separability (Brown, Karesen, and Tonellato, 2000; Fuentes, 2006; Li,
Genton, Sherman, 2007; Mitchell, Genton, and Gumpertz, 2005), the evaluation of spatial or
temporal margins (De Iaco, Posa, and Myers, 2013), and types of nonseparability (De Iaco and
Poca, 2013).
An important issue is the assessment of full symmetry. Although fully symmetry is a desirable
assumption from a computational point of view, it may not be appropriate in applications (Shao
and Li, 2009). Atmospheric, environmental, and geophysical processes are often under the influence
of prevailing air or water flows, resulting in a lack of full symmetry (Gneiting, Genton, and Guttorp,
2007). Nonseparable and fully symmetric space-time covariance functions can be constructed
by mixtures of separable covarianc functions (De Iaco, Myers, and Posa, 2002; Ma, 2003a). A
geometric non-fully symmetric space-time covariance function can be formulated using a geometric
transformation on a fully symmetric space-time covariance function (Stein, 2005). There is a great
need of covariance functions which are non-fully symmetric in the spatiotemporal domain (Mateu,
Porcu, and Gregori, 2008).
In this work, we focus on the construction of a non-fully symmetric space-time (NFSST) Matern
correlation model that satisfies any given Matern margins. Specifically, given any spatial Matern
correlation function Md(h|ν1, a1) (called the spatial Matern margin) and a temporal Matern corre-
lation function M1(u|ν2, a2) (called the temporal Matern margin), we construct an NFSST Matern
correlation function C(h, u) satisfying
C(h, 0) = Md(h|ν1, a1), C(0, u) = M1(u|ν2, a2). (3)
Although the model is non-fully symmetric, its spatial and temporal margins are both isotropic.
We allow the two smoothness parameters and the two scale parameters to be arbitrary. To our
best knowledge, our model is the first one with these properties.
The remainder of this article is organized as follows. In Section 2, we provide an approach,
modified from Bochner’s representation for correlation functions. In Section 3, we employ the
approach to construct an NFSST Matern model. In Section 4, we apply our NFSST model to a
3

meteorological data. In Section 5, we provide a discussion.
2 Bochner’s Representation
According to Bochner’s representation (Bochner, 1955), a real continuous space-time function C
on Rd × R is a (stationary) space-time covariance function iff
C(h, u) =
∫ ∫Rd×R
eihT s+iutF (ds, dt), (4)
for any s,h ∈ Rd and t, u ∈ R, where F is the spectral measure satisfying F (A,B) = F (−A,−B)
for any Borel A ⊆ Rd and B ⊆ R. We assume F is a finite measure in (4) since we need V(Y (s, t))
be finite. If C(h, u) is integrable, then F is absolutely continuous with respect to the Lebesgue
measure on Rd × R and Bochner’s representation (4) becomes
C(h, u) =
∫Rd
∫Reih
T s+iutf(s, t)dtds,h ∈ Rd, u ∈ R, (5)
where the non-negative integrable function f(s, t) is called the spectral density and satisfies
f(s, t) = f(−s,−t). If the variance of the process is one, then F is a probability measure in
(4) and the corresponding f in (5) is a probability density function. Hence a correlation function
can be viewed as a characteristic function of a random variable provided that the characteristic
function is real.
Bochner’s representation is powerful in the construction of space-time correlation functions.
It can be specified as a spatial correlation function if time is ignored or as a temporal correlation
function if space is ignored. In the spatiotemporal context, a few nonseparable space-time covari-
ance models can be constructed using Bochner’s representation (Cressie and Huang, 1999; Stein,
2005).
Bochner’s representation has a few modifications. One of the modifications is used in the con-
struction of the generalized Gauchy spatial correlation function (Devroye, 1990). This modification
can be generalized to the spatiotemporal context for a space-time covariance function.
Theorem 1 Let A(h, u) be a space-time covariance function. Let Z1 and Z2 be positive random
variables with joint CDF G. Then
C(h, u) =
∫ ∞
0
∫ ∞
0
A(hz1, uz2)G(dz1, dz2) (6)
4

is a valid space-time covariance function.
Theorem 2 Let Z1 and Z2 be independent positive random variables on (0,∞) in Theorem 1. The
necessary and sufficient conditions for C(h, u) to be separable in (6) is that A(h, u) be separable.
The general way in our approach is to use a trivial A(h, u) to construct a non-trivial C(h, u).
As the choice of Z1 and Z2 is generally flexible, many different families of space-time correlation
functions may be obtained if different types of Z1 and Z2 are utilized. In the following section, we
provide a way to construct a non-fully symmetric space-time Matern model by using particular
Z1 and Z2 with a Gaussian characteristic function A(h, u).
3 NFSST Matern Model
Our main idea is to provide special A(h, u), Z1, and Z2 in Theorem 2 such that C(h, u) is non-fully
symmetric and satisfies (3). According to (6), if A(h, u) is non-fully symmetric, then C(h, u) is
also non-fully symmetric. Therefore, we need to provide a non-fully symmetric A(h, u) in the
construction. The way to choose A(h, u), Z1, and Z2 in motivated from the following.
3.1 Spatial Matern Model
The spatial Matern correlation function (2) can be viewed as the characteristic function of a
random variable on Rd with a spectral density
md(x|ν, a) =Γ(ν + d/2)
πd2adΓ(ν)
1
(1 + ∥x∥2a2
)ν+d2
,x ∈ Rd, a, ν > 0. (7)
In an alternative way, the spatial Matern model can be defined by the following theorem.
Theorem 3 Let u be a d-dimensional N(0, Id) random variable and V be a univariate Γ(ν, 1/2)
random variable. If u and V are independent, then md(s|ν, a) is the PDF and Md(h|ν, a) is the
characteristic function of x = au/√V .
Corollary 1 If ν, a > 0, then for any h ∈ Rd there is
Md(h|ν, a) =1
2νΓ(ν)
∫ ∞
0
vν−1e−12(a2∥h∥2
v+v)dv. (8)
5

Another expression of the modified Bessel function is derived by comparing (8) with (2):∫ ∞
0
vν−1e−12( z
2
v+v)dv = 2|z|νKν(z) = 2νΓ(ν)Mν(z), z ∈ R, ν > 0. (9)
This expression is useful in the numerical purpose for our NFSST Matern model in Section 3.3.
3.2 Space-Time Matern Model
If u1 ∼ N(0, Id) and U2 ∼ N(0, 1) independently, then the characteristic function of (u1, U2) is
E(ei(hTu1+uU2)) = e−12(∥h∥2+u2). Let V1 ∼ Γ(ν1, 1/2) and V2 ∼ Γ(ν2, 1/2) independently, which are
also independent of (u1, U2). Then,
C(h, u) = E(e− 1
2(a21∥h∥2
V1+
a22u2
V2)
)is a valid space-time correlation function, which is separable and satisfies (1) and (3). If the
dependence between u1 and U2 is imposed, then a nonseparable space-time Matern model is
obtained.
Let u1
U2
∼ N
0
0
,
Id r
rT 1
.
Since the eigenvalues of the variance-covariance matrix are either 1 or 1 − ∥r∥2, the distribution
is valid if and only if ∥r∥ < 1. The characteristic function of u1 and U2 is
Ar(h, u) = e−12(∥h∥2+2urTh+u2).
Definition 1 (NFSST Matern Model). Let
Mr,a1,a2,ν1,ν2(h, u) = E
(e− 1
2(a21∥h∥2
V1+
2a1a2urT h√
V1V2+
a22u2
V2)
), (10)
where V1 and V2 are independent Γ(ν1, 1/2) and Γ(ν2, 1/2) random variables, respectively. If
a1, a2, ν1, ν2 ∈ R+ and r ∈ Rd with ∥r∥ < 1, then Mr,a1,a2,ν1,ν2(h, u) is called an NFSST Matern
correlation function. The class of space-time correlation functions
M = {Mr,a1,a2,ν1,ν2 : a1, a2, ν1, ν2 ∈ R+, r ∈ Rd, ∥r∥ < 1}
is called the NFSST Matern model.
6

Lemma 1 Let d ≥ 2, ∥h∥, ∥r∥, and u be positive in (10). If rTh = 0, then Mr,a1,a2,ν1,ν2(h, u) =
Md(h|ν1, a1)M1(u|ν2, a2); if rTh > 0, then Md(h|ν1, a1)M1(u|ν2, a2) < Mr,a1,a2,ν1,ν2(h, r); if rTh <
0, then Md(h|ν1, a1)M1(u|ν2, a2) > Mr,a1,a2,ν1,ν2(h, r).
Let
Dr,a1,a2,ν1,ν2(h, u) = Mr,a1,a2,ν1,ν2(h, u)−Md(h|ν1, a1)M1(u|ν2, a2)
be the difference between the NFSST Matern and the separable space-time Matern correlation
functions. For any d ≥ 2, there is
Dr,a1,a2,ν1,ν2(h, u)Dr,a1,a2,ν1,ν2(−h, u) ≤ 0 (11)
and the equality holds iff rTh = 0 or u = 0. If d = 1, then
Dr,a1,a2,ν1,ν2(h, u)Dr,a1,a2,ν1,ν2(−h, u) ≤ 0 (12)
and the equality holds iff at least one of u,h ∈ R and r ∈ (−1, 1) is zero.
Theorem 4 Mr,a1,a2,ν1,ν2 is fully symmetric or separable iff r = 0.
An NFSST Matern correlation function can be separable or nonseparable. If r = 0, then
Mr,a1,a2,ν1,ν2(h, u) is nonseparable in the whole space but separable in the subspace {h ∈ Rd :
rTh = 0}. Its spatial margin is a spatial Matern correlation function and its temporal margin is a
temporal Matern correlation function. The two margins can be arbitrary. Given the two margins,
Mr,a1,a2,ν1,ν2 can be constructed by introducing additional parameter r. Let r = (r1, · · · , rd). Then,
r can also be expressed via a polar transformation on Rd as
r1 =∥r∥ cos θ1,
rj =∥r∥(j−1∏k=1
sin θj) cos(θj), j = 2, · · · , d− 1,
rd =∥r∥d−1∏k=1
sin θk,
(13)
where θ1, · · · , θd−2 ∈ [0, π] and θd−1 ∈ [0, 2π]. One can also use (∥r∥, θ1, · · · , θd−1) to describe
nonseparability. In practice, (13) is convenient in interpretation.
7

3.3 Algorithm
As (10) cannot be used for the numerical purpose, we decide to provide a Taylor expansion for
Mr,a1,a2,ν1,ν2 such that we can compute its numerical values. The basic way is to solve the Taylor
expansion of the right side of (10) with positive ∥h∥, ∥r∥, and |u| as
Mr,a1,a2,ν1,ν2(h, u) =∞∑n=0
(−1)n(a1a2urTh)n
n!E(V
−n2
1 V−n
22 e
− 12(a21∥h∥2
V1+
a22u2
V2)
)=
∞∑n=0
(−1)n(a1a2urTh)n
n!E(V
−n2
1 e−a21∥h∥2
2V1
)E(V
−n2
2 e−a22u
2
2V2
)=
∞∑n=0
bn,r,a1,a2,ν1,ν2(h, u)
(14)
where
bn,r,a1,a2,ν1,ν2(h, u) =(−1)n(a1a2ur
Th)n
2ν1+ν2Γ(ν1)Γ(ν2)n!Dν1−n
2(a1∥h∥)Dν2−n
2(a2|u|)
and
Dα(z) =
∫ ∞
0
vα−1e−12( z
2
v+v)dv, α ∈ R. (15)
The difference between Dα(z) and the integral in (9) is that we allow α ≤ 0 in the definition of Dα,
which is not contained in (9). Values of Dα when α ≤ 0 cannot be directly obtained by Corollary
1. If α > 0, then Dα(z) is well-defined for any z ∈ R. If α ≤ 0, then Dα(z) is only well-defined for
z = 0. To have a well-defined Taylor expansion in (14), we need to have a way to compute Dα(z)
for any α ≤ 0 with z = 0 and also a way to justify the convergence rate of the Taylor expansion.
Theorem 5 If α > 0, then Dα(z) = 2αΓ(α)Mα(|z|) for all z ∈ R. If α < 0 and |z| > 0, then
Dα(|z|) = 2|α|Γ(|α|)|z|2αM|α|(|z|). If |z| > 0, then D0(|z|) = 4|z|−2[M2(|z|)−M1(|z|)].
Corollary 2 If α ≤ 0 and β > |α| then |z|2βDα(z) is well-defined and continuous in all z ∈ R.
Using Theorem 5 and Corollary 2, we derive a nice property of Mν(|z|) as
lim|z|→0
Mν(|z|)− 1
|z|2ν= −2−2νΓ(1− ν)
Γ(ν + 1),
implying that if ν ∈ (0, 1) then for sufficiently small |z| there is
Mν(z) = 1− 2−2νΓ(1− ν)
Γ(ν + 1)|z|2ν + o(|z|2ν). (16)
8

Let h0 = h/∥h∥, u0 = u/|u|, and r0 = r/∥r∥. Then
bn,r,a1,a2,ν1,ν2(h, u) =(−1)n(u0r
T0 h0)
n
2ν1+ν2Γ(ν1)Γ(ν2)n!∥r∥ndn,ν1(a1∥h∥)dn,ν2(a2|u|), (17)
where
dn,ν(z) = |z|nDν−n2(|z|), z ∈ R. (18)
If neither 2ν1 nor 2ν2 is an integer, then it enough to consider
dn,ν(z) = 2|ν−n2|Γ(|ν − n
2|)|z|2ν∧nM|ν−n
2|(|z|), z ∈ R, (19)
in the computation of (17); otherwise, one also needs to consider
dn,n2(z) = 4|z|n−2[M1(|z|)−M2(|z|)], z ∈ R. (20)
It is enough to consider both (19) and (20) in the computation of Mr,a1,a2,ν1,ν2(h, u), but (20)
is not used if neither 2ν1 nor 2ν2 is an integer. For instance, if 0 < ν1, ν2 < 1/2 then, only using
(19), we obtain
dn,ν1(a1∥h∥) = 2n2−ν1Γ(
n
2− ν1)(a1∥h∥)2ν1Mn
2−ν1(a1∥h∥),
and
dn,ν2(a2|u|) = 2n2−ν1Γ(
n
2− ν2)(a2|u|)2ν2Mn
2−ν2(a2|u|)
for any n ≥ 1, which yields
Mr,a1,a2,ν1,ν2(h, u)
=Md(h|ν1, a1)M1(u|ν2, a2) +∞∑n=1
(−1)n(u0rT0 h0)
nΓ(n2− ν1)Γ(
n2− ν2)
22(ν1+ν2)−nΓ(ν1)Γ(ν2)n!
× ∥r∥n(a1∥h∥)2ν1(a2|u|)2ν2Mn2−ν1(a1∥h∥)Mn
2−ν2(a2|u|), 0 < ν1, ν2 < 1/2.
(21)
If ν1 = ν2 = 1/2 then, also using (20), we obtain
d1, 12(a1∥h∥) =
4
a1∥h∥[M1(a1∥h∥)−M2(a1∥h∥)],
and
d1, 12(a2∥h∥) =
4
a2|u|[M1(a2|u|)−M2(a2|u|)],
9

which yields
Mr,a1,a2,12, 12(h, u)
=e−(
∥h∥a1
+|u|a2
) − 8rTh0
πa1a2u∥h∥[M1(a1∥h∥)−M2(a1∥h∥)][M1(a1|u||)−M2(a2|u|)]
+∞∑n=2
(−1)n2n−2(u0rT0 h0)
nΓ(n−12)Γ(n−1
2)
πn!∥r∥n(a1∥h∥)(a2|u|)Mn−1
2(a1∥h∥)Mn−1
2(a2|u|).
(22)
As D0(z) with z = a1∥h∥ or z = a2|u| may appear in (14) if either 2ν1 or 2ν2 is an integer, we
need (20) in the computation.
Theorem 6 The right size of (14) absolutely uniformly converges in h ∈ Rd, u ∈ R, r ∈ Rd
exponentially fast if ∥r∥ ≤ 1− ϵ for any ϵ ∈ (0, 1).
Theorem 5 provides a way to compute bn,r,a1,a2,ν1,ν2(h, u) for a given n. A numerical algorithm
is obtained if (14) is employed. Corollary 2 concludes that bn,r,a1,a2,ν1,ν2(h, u) is continuous in all h
and u for any n. Theorem 6 concludes that (14) is valid and its right side is absolutely continuous
in h, u, and r if ∥r∥ < 1− ϵ for any given ϵ > 0. The expansion uniformly converges to a separable
model as ∥r∥ → 0. The convergence rate of (14) is exponential, which means that the expansion
converges fast. Therefore, the algorithm based on (14) is efficient.
3.4 Correlation Functions with Ridges
Space-time correlation functions may have a kind of discontinuity in correlations of certain linear
combinations of the random field. For a nonnegative integer m, suppose that Y (s, t) is m times
mean square differentiable spatiotemporal Gaussian random field in its second coordinate, and
write Ym(s, t) as the mth mean square derivative. The covariance function of Ym is Cm(h, u) =
(−1)m∂2mC(h, u)/∂u2m. Let ρmϵ (h, u) = Cor(Ym(0, ϵ)− Ym(0, 0), Ym(h, u+ ϵ)− Ym(h, u)) and let
ρm(t, s) be its limit as ϵ ↓ 0, assuming that the limit exists. Suppose d = 1 such that we can
use Cm(h, u) for h, u ∈ R to express Cm. According to Proposition 1 of Stein (2005), if Cm is a
continuous function on R×R and there exist 0 < α1 < · · · < αp < 2 and even functions C1, · · · , Cp
on R with C1(0) = 0 such that
Cm(h, u) = Cm(h, 0) +
p∑j=1
Cj(h)|u|αj +Rh(u), (23)
10

where Rh(u) = O(u2) as u → 0 for any given h and Rh(·) has a bounded second derivative, then
supu∈R
limϵ↓0
∣∣∣∣C1(h){|u+ ϵ|α1 − 2|u|α1 + |u− ϵ|α1
2C1(0)ϵα1− ρmϵ (h, u)
∣∣∣∣ = 0, (24)
where
ρm(h, u) =
C1(h)/C1(0), u = 0,
0, u = 0.
Assume (23) holds for m = 0. Using (24) with m = 0 for ρ0(h, u), one can consider the mean
squared error (MSE) of the ordinary kriging predictor of Y (0, ϵ) based on Y (0, 0), Y (h, 0), and
Y (h, ϵ), which is 2{C0(0)−C21(h)/C1(0)}ϵα1+o(ϵα1). As the MSE of the ordinary kriging predictor
of Y (0, ϵ) based on Y (0, 0) is 2C1(0)ϵα1 + o(ϵα1), the lack of continuity of ρ0(h, u) along the h
axis leads to best linear unbiased predictors that depend on observations whose correlations are
bounded away from 1 as ϵ ↓ 0, implying that correlation functions satisfying (23) have ridges
along their axes. Stein (2005) points out that many separable correlation functions satisfy (23).
All examples of Cressie and Huang (1999) satisfy (23). The sum of product form models with
functions of just space and just time (De Iaco, Myers, and Posa, 2001) may share ridges along
their axes. It would appear that nonseparable covariance functions proposed by Gneiting (2002)
may not be smoother along their axes than at the origin.
For a fully symmetric space-time correlation function C(h, u) on R×R. If there is an 0 < α1 < 2
such that 0 = C1(h) = limu↓0 u−α1 [C(h, u) − C(h, 0)] exists, then for sufficiently small u there is
C(−h, |u|) = C(h, |u|) = C(h, 0)+C1(h)|u|α1 +O(|u|α1), implying that C1(h) is an even function.
Therefore, a fully symmetric space-time correlation probably satisfies (23).
As our family is not fully symmetric, we consider a possible expansion related to (23). It is
obtained if (16), (17), and (19) are combined. In particular, we consider the Taylor expansion for
given h and r satisfying rTh = 0. We conclude that for sufficiently small u with ν2 ∈ (0, 1/2)
there is
Mr,1,1,ν1,ν2(h, u) =Mν1(∥h∥)− sign(urTh)C1(∥h∥)|u|2ν2 + C2(∥h∥)|u|2ν2 + o(|u|2ν2),
where C1(∥h∥) > 0. Therefore, our model does not satisfy (23), implying that Mr,a1,a2,ν1,ν2 does
not belong to the covariance family with a covariance ridge problem considered by Proposition 1
of Stein (2005).
11

(a): u=0
h1
h 2
0.78
0.78
0.78
0.78
0.8
0.8
0.8
0.8 0.82
0.84
0.86
0.88
0.9
0.92
0.94
0.96
−0.10 −0.05 0.00 0.05 0.10
−0.
10−
0.05
0.00
0.05
0.10
(b): u=0.1
h1
h 2
0.62
0.62
0.64 0.66
0.66
0.66
0.68
0.7
0.72
0.74
0.76
0.78
−0.10 −0.05 0.00 0.05 0.10
−0.
10−
0.05
0.00
0.05
0.10
(c): u=0.2
h1
h 2
0.54
0.54
0.56
0.58
0.6
0.62
0.64
0.66
0.68
−0.10 −0.05 0.00 0.05 0.10
−0.
10−
0.05
0.00
0.05
0.10
(d): u=0.5
h1
h 2
0.3
5
0.35
0.36
0.36
0.37
0.38 0.39
0.4
0.41
0.42
0.43
0.44
0.45
0.46
0.47
−0.10 −0.05 0.00 0.05 0.10
−0.
10−
0.05
0.00
0.05
0.10
Figure 1: Contour plots for Mr,a1,a2,ν1,ν2(h, u) as functions of h = (h1, h2) for selected u when
r = (0.5, 0), a1 = a2 = 1, and ν1 = ν2 = 0.35.
3.5 The Case When d = 2
We specify Mr,a1,a2,ν1,ν2(h, u) in the case when d = 2 since it is important in practice. Let
r = (r1, r2) and h = (h1, h2) when d = 2. If ∥r∥ and ∥h∥ are positive, then h0 = (h01, h02) =
(h1/∥h∥, h2/∥h∥) and r0 = (r01, r02) = (r1/∥r∥, r2/∥r∥) are well defined. Equation (10) becomes
Mr,a1,a2,ν1,ν2(h, u) = E[(
e−a1a2u0|u||∥r∥∥h∥(r01h01+r02h02)√
V1V2
)(e− 1
2(a21∥h∥2
V1+
a22u2
V2)
)]. (25)
If u0 > 0 then, given |u| and ∥h∥, Mr,a1,a2,ν1,ν2(h, u) is minimized at h0 = r0 and maximized at
h0 = −r0; otherwise, Mr,a1,a2,ν1,ν2(h, u) is maximized at h0 = r0 and minimized at h0 = −r0.
If h0 and u0 are vertical, then Mr,a1,a2,ν1,ν2(h, u) = M2(h|ν1, a1)M1(u|ν2, a2). This is satisfied if
r01h01 + r02h02 = 0.
To study the performance of M in the spatial domain, we use (17) to numerically compute
the values of the correlation function on the left side of (25) for selected u when r = (0.5, 0),
a1 = a2 = 1, and ν1 = ν2 = 0.35 (Figure 1). It shows that the right side of (25) reduces to
M2(h|ν1, a1) if u = 0 (Figure 1(a)). The contour plots are more symmetric for small positive
u values than those for large positive u values. The values of the correlation function strictly
decreases in |u| or ∥h∥ increases along a certain direction. The speed of the decrease depends
12
(a): r=(0,0)
h1
h 2
0.38
0.38
0.38
0.38
0.39
0.39
0.39
0.39 0.4
0.41
0.42
0.43
0.44
0.45
0.46
−0.10 −0.05 0.00 0.05 0.10
−0.
10−
0.05
0.00
0.05
0.10
(b): r=(0.1,0)
h1
h 2
0.37
0.37
0.38
0.38
0.38
0.38
0.39
0.39
0.39 0.4
0.41
0.42
0.43
0.44
0.45
0.46
−0.10 −0.05 0.00 0.05 0.10
−0.
10−
0.05
0.00
0.05
0.10
(c): r=(0.2,0)
h1
h 2
0.37
0.37
0.38 0.39
0.39
0.39
0.4
0.41
0.42
0.43
0.44
0.45
0.46
−0.10 −0.05 0.00 0.05 0.10
−0.
10−
0.05
0.00
0.05
0.10
(d): r=(0.5,0)
h1
h 2
0.3
5
0.35
0.36
0.36
0.37
0.38 0.39
0.4
0.41
0.42
0.43
0.44
0.45
0.46
0.47
−0.10 −0.05 0.00 0.05 0.10
−0.
10−
0.05
0.00
0.05
0.10
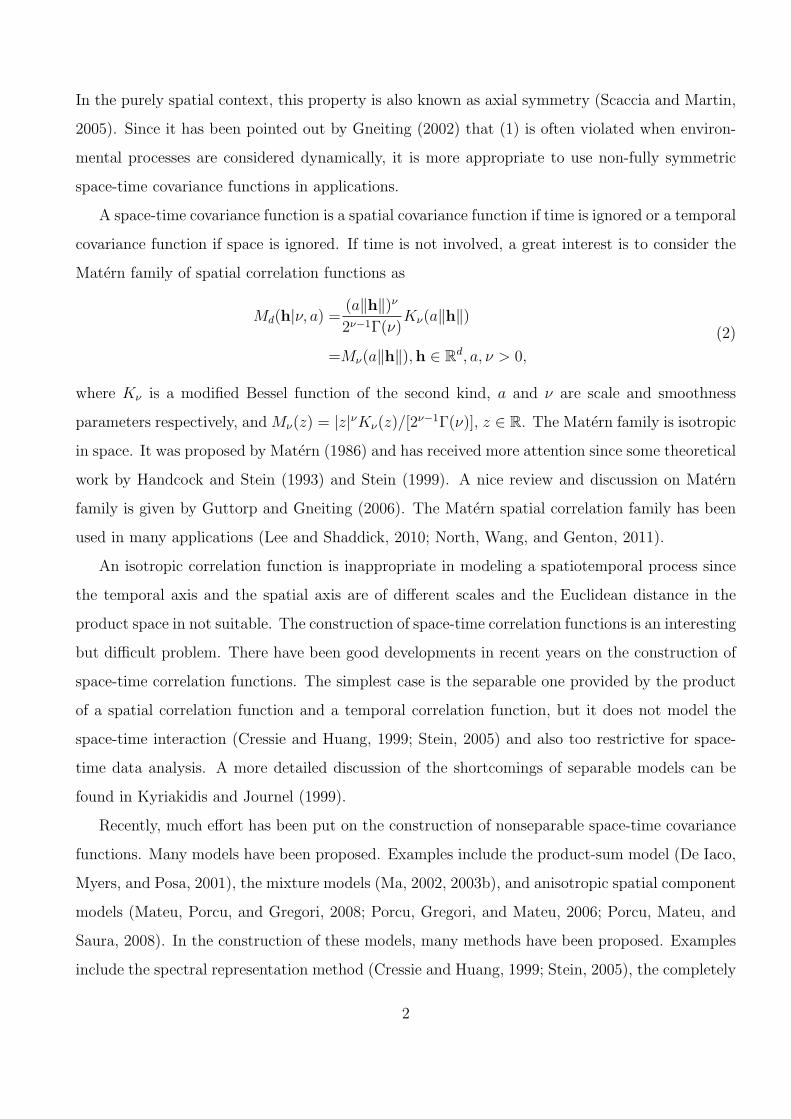
Figure 2: Contour plots for Mr,a1,a2,ν1,ν2(h, u) as functions of h = (h1, h2) for selected r when
u = 0.5, a1 = a2 = 1, and ν1 = ν2 = 0.35.
on the direction of r, which is maximized at the positive direction but minimized at the negative
direction of r.
To compare, we also use (17) to study the performance of M in the spatial domain when r
varies. We numerically compute the values of the correlation function on the left side of (25) for
selected r when u = 0.5, a1 = a2 = 1, and ν1 = ν2 = 0.35 (Figure 2). It shows that curves in
Figure 1(a) and Figure 2(a) are parallel. Both of them are isotropic. Values of curves in Figure
2(a) equals values of curves in Figure 1(a) multiplied by M0.35(0.5) = 0.4815. Curves in the rest
plots of Figure 2 are not isotropic. The magnitude of anisotropy increases as ∥r∥ increases. Curves
in Figure 1(d) and Figure 2(d) are identical. They provide the extremely anisotropic case in those
displayed in Figure 2.
Note that both r and h can be expressed by their norms and their angles. We also use the
polar coordinates to express the Taylor expansion of Mr,a1,a2,ν1,ν2(h, u). The result based on
the polar transformation is easy to interpret. Let the angle of r be ω and the angle of h be η,
ω, η ∈ (−π, π]. Then, r = (r1, r2) = (∥r∥ cosω, ∥r∥ sinω), h = (h1, h2) = (∥h∥ cos η, ∥h∥ sin η),
and rTh = r1h1 + r2h2 = ∥r∥∥h∥ cos(ω − η), which yields cos(ω − η) = (r1h1 + r2h2)/(∥r∥∥h∥) =
13

(a): η=0
u
||h||
0.2
0.3
0.4
0.4
0.5 0.6
0.7 0.8 0
.9
−0.4 −0.2 0.0 0.2 0.4
0.0
0.1
0.2
0.3
0.4
0.5
(b): η=π 8
u
||h||
0.3
0.3
0.4
0.4
0.5 0.6
0.7 0.8 0
.9
−0.4 −0.2 0.0 0.2 0.4
0.0
0.1
0.2
0.3
0.4
0.5
(c): η=π 4
u
||h||
0.3
0.3
0.4
0.4
0.5 0.6
0.7 0.8
0.9
−0.4 −0.2 0.0 0.2 0.4
0.0
0.1
0.2
0.3
0.4
0.5
(d): η=π 2
u
||h||
0.3
0.3
0.4 0.4
0.5 0.6
0.7 0.8
0.9
−0.4 −0.2 0.0 0.2 0.4
0.0
0.1
0.2
0.3
0.4
0.5
Figure 3: Contour plots for Mr,a1,a2,ν1,ν2(h, u) as functions of ∥h∥ and u for selected η when
r = (0.5, 0), a1 = a2 = 1, and ν1 = ν2 = 0.35, where η is the angle between h and the horizontal
axis.
r01h01 + r02h02 and
bn,r,a1,a2,ν1,ν2(h, u) =[−sign(u) cos(ω − η)]n
2ν1+ν2Γ(ν1)Γ(ν2)n!∥r∥ndn,ν1(a1∥h∥)dn,ν2(a2|u|). (26)
If u and ∥h∥ are positive, then Mr,a1,a2,ν1,ν2(h, u) < M2(h|ν1, a1)M1(u|ν2, a2) if |ω − η| < π/2
and Mr,a1,a2,ν1,ν2(h, u) > M2(h|ν1, a1)M1(u|ν2, a2) if |ω − η| > π/2. Using the polar expression of
bn,r,a1,a2,ν1,ν2(h, u) in (26), we can also interpret Figure 1 according to a rotation of r: if r is rotated
by an orthogonal transformation then the corresponding contour plot of Mr,a1,a2,ν1,ν2(h, u) is also
rotated with the same angle of the transformation.
To study the performance of M in the spatiotemporal domain, we use (26) to numerically
compute the values of Mr,a1,a2,ν1,ν2(h, u) (Figure 3). We still use r = (0.5, 0), a1 = a2 = 1, and
ν1 = ν2 = 0.35 in the computation such that ω = 0 and cos(ω − η) = cos η in (26). It shows
that the value of the correlation function is not symmetric about zero in u when η = π/2. If
η = π/2, then cos(η) = 0, implying that Mr,a1,a2,ν1,ν2(h, u) is separable. If η ∈ (π/2, π], then
cos(η) = − cos(π−η), implying that corresponding plots for η ∈ [π/2, π] can be derived by simply
reflecting the plots for η ∈ [0, π/2]. Note that Mr,a1,a2,ν1,ν2(h, u) is only separable in the sub-space
{h ∈ R2 : η = π/2}. The lower-right panel in Figure 3 is just a special case of Lemma 1.
14

(a): η=0
u
||r||
0.2
0.25
0.25
0.3
0.3
0.35
0.35
0.4
0.4
0.45
0.45
−0.4 −0.2 0.0 0.2 0.4
0.0
0.1
0.2
0.3
0.4
0.5
(b): η=π 8
u
||r||
0.2
0.25
0.25
0.3
0.3
0.35
0.35
0.4
0.4
0.45
0.45
−0.4 −0.2 0.0 0.2 0.4
0.0
0.1
0.2
0.3
0.4
0.5
(c): η=π 4
u
||r||
0.25
0.25
0.3
0.3
0.35
0.35
0.4
0.4
0.45
0.45
−0.4 −0.2 0.0 0.2 0.4
0.0
0.1
0.2
0.3
0.4
0.5
(d): η=π 2
u
||r||
0.24
0.24
0.26
0.26
0.28
0.28
0.3
0.3
0.32
0.32
0.34
0.34
0.36
0.36
0.38
0.38
0.4
0.4
0.42
0.42
0.44
0.44
0.46 0.46
0.48 0.48
−0.4 −0.2 0.0 0.2 0.4
0.0
0.1
0.2
0.3
0.4
0.5
Figure 4: Contour plots for Mr,a1,a2,ν1,ν2(h, u) as functions of ∥r∥ and u for selected η when
h = (0.5, 0), a1 = a2 = 1, and ν1 = ν2 = 0.35, where η is the angle between h and the horizontal
axis.
In the end, we evaluate the performance of M in the temporal domain. We let r change but
h be fixed at h = (0.5, 0) (Figure 4). It shows that values of Mr,a1,a2,ν1,ν2(h, u) decreases in ∥r∥
if η < π/2 and u is positive. Values of Mr,a1,a2,ν1,ν2(h, u) increases in ∥r∥ if η < π/2 and u is
negative. Values of Mr,a1,a2,ν1,ν2(h, u) does not vary in ∥r∥ if η = π/2. This is expected based on
(14).
A nice property is thatMr,a1,a2,ν1,ν2(h, u) is symmetric about r in the spatial domain. In partic-
ular, for any distinct h1,h2 ∈ R2 satisfying ∥h1∥ = ∥h2∥, if h1 and h2 are symmetric about r, then
Mr,a1,a2,ν1,ν2(h1, u) = Mr,a1,a2,ν1,ν2(h2, u); otherwise, Mr,a1,a2,ν1,ν2(h1, u) > Mr,a1,a2,ν1,ν2(h2, u) if
the angle between h1 and r is less than the angle between h2 and r. In practice, r provides the
strongest and weakest dependence direction between space and time. For positive u, the depen-
dence between space and time is the strongest if the direction of the space change is the opposite
of r and it is the weakest if the direction is the same of r. This provides a nice way to interpret
our family in applications.
15
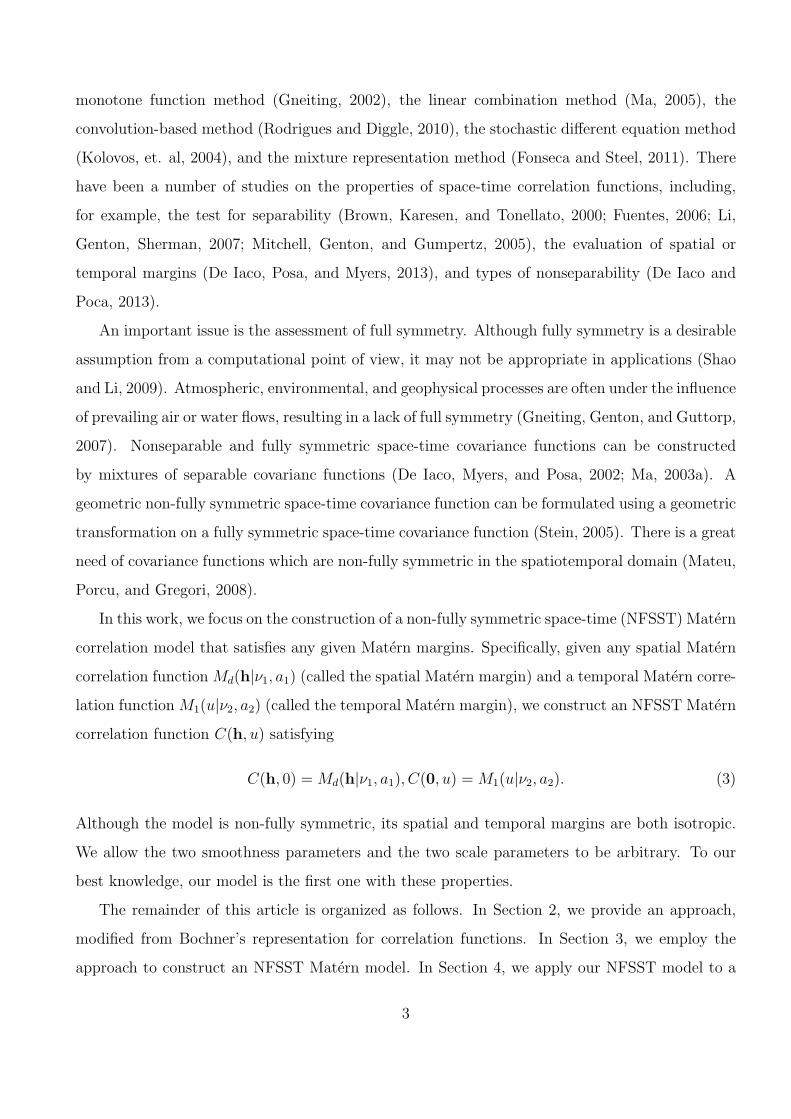
Figure 5: Locations of Weather Stations in Shandong Province, China in July 2007.
4 Application
4.1 Shandong Temperature Data
We applied our M to the Chinese daily temperature data in this section. The data were provided
by the Climatic Data Center, National Meterological Information Center, China Meteorological
Administration. They contained the average daily temperature, the lowest daily temperature, and
the highest daily temperature at 756 weather stations from 1951 to 2007 in all of the nine climatic
zones in China. In order to avoid the consideration of climate zones and seasonal patterns, we
decided to focus on our analysis for data within a single month and a single province.
We extracted daily highest temperature data in July 2007 in Shandong province. Shandong is
located in Northern China, extended from 34.37o to 39.38o latitude north and 114.32o to 122.72o
longitude east. Its area is about 157.8 thousand square kilometers. After extraction, the data set
contained 20 stations in the province from the first day to the last day in July 2007 (Figure 5).
By excluding one missing value, it had 619 observations of daily highest temperature values. The
impact of altitude was removed by regressing the daily highest temperature across sites on their
monthly averages.
16

Let Y (s, t) be the daily highest temperature relative to its site average. A geostatistical model
Y (s, t) = µ+ Z(s, t) + ϵ(s, t) (27)
was basically considered to analyze the spatiotemporal variations of Y (s, t), where ϵ(s, t) was a
white noise process and Z(s, t) was a mean zero stationary Gaussian process. The covariance
function of Z(s, t) was modeled by M as
E[Z(s, t)Z(s+ h, t+ u)] = τ 2Mr,a1,a2,ν1,ν2(h, u), (28)
where 1/a2 (given by km) and 1/a2 (given by day) were considered as two correlation lengths for
space and time, respectively. There were seven parameters on the right side of (28). Together the
variance parameter σ2 in the white noise process, our statistical model contained eight parameters
for the spatiotemporal variation of Y (s, t). We used η = σ2/(τ 2 + σ2) to represent the nugget
effect parameter and θ = (ν1, 1/a1, ν2, 1/a2, r1, r2) to represent the correlation parameters, where r1
represented the correlation between longitude and time and r2 represented the correlation between
latitude and time. The nugget effect disappeared if η = 0.
We attempted to estimate η and θ by the profile likelihood approach. In particular, let Y (si, ti),
i = 1, · · · , 619 be the ith observation in the data set. Then,
Cov[Y (si, ti), Y (sj, tj)] = (σ2 + τ 2)ρij = κ2ρij,
where
ρij = ρij(η, θ) = Corr[Y (si, ti), Y (sj, tj)] = (1− η)Mr,a1,a2,ν1,ν2(sj − si, tj − ti), i = j.
Let R = R(η, κ2) = (ρij)i,j=1,··· ,619 be the correlation matrix of the observations. The loglikelihood
function of the data was
ℓ(µ, κ2, η, θ) = −619
2log 2π − 1
2log κ2 − 1
2log | det(R)| − 1
2κ2(y − 1µ)′R−1(y − 1µ), (29)
where y = (Y (s1, t1), · · · , Y (s619, t619))′ and 1 is the vector with all of its elements equal to one.
Given η and θ, the conditional MLE of µ was
µ(η, θ) = (1′R−11)−11′R−1y (30)
and the conditional MLE of κ2 was
κ2(η, θ) =1
619[1′R−11− yR−11(1′R−11)−11′R−1y]. (31)
17

−250 −150 −50 0 50
0.40
0.45
0.50
0.55
0.60
(a): Parallel to r
Location Change
Sam
ple
Cor
rela
tions
−400 −200 0 200 400
0.40
0.45
0.50
0.55
0.60
(b): Vertical to r
Location ChangeS
ampl
e C
orre
latio
ns
Figure 6: Values of C(si − sj, 1) when they are greater than 0.4 corresponding to the direction
parallel to r (left) and the counterclockwise direction vertical to r (right).
Putting (30) and (31), we obtained the profile loglikelihood function as
ℓP (η, θ) = −619
2(1 + log
2π
619)− 1
2log | det(R)| − 619
2log(y′My), (32)
where M = R−1 −R−11(1′R−11)1′R−1.
We computed the profile MLEs of η and θ by maximizing ℓP (η, θ). Let them be denoted
by η and θ. Then, they were also the MLEs of η and θ respectively, and the profile MLEs
of µ and κ2, also their MLEs, were µ = µ(η, κ2) and κ2 = κ(η, θ) (Patefield, 1977). We car-
ried out a Newton-Raphson algorithm to compute η and θ. Their values were η = 0.0728,
θ = (ν1, 1/a1, ν2, 1/a2, r1, r2) = (0.2674, 1005, 3.9514, 0.2588,−0.1894, 0.3679). After that, we had
µ = 0.0956 and κ2 = 2.5826. Since the corresponding estimates of correlation parameters in
Mr,a1,a2,ν1,ν2 were r = (−0.1894, 0.3679) = 0, we concluded that the estimate of Matern correla-
tion model was nonseparable.
To confirm, we investigated the properties of sample correlations between stations when time
change was one day. In particular, we computed
C(si − sj, 1) = Corr[Y (si, t), Y (sj, t+ 1)] =
∑30t=1[Y (si, t)− Yi][Y (sj, t+ 1)− Yj]
{∑30
t=1[Y (si, t)− Yi]2}12{∑30
t=1[Y (sj, t+ 1)− Yj]2}12
18
Figure 7: China Monsoon in Summer
for all i, j = 1, · · · , 20, where we used Yi =∑30
t=1 Y (si, t)/30 and Yj =∑30
i=1 Y (si, t + 1)/30. We
obtained 400 sample correlation values. We had 326 of those were positive and 74 of those were
negative. For sample correlations with absolute values greater than 0.2, we had 203 of those were
positive and 17 of those negative. For sample correlations with absolute values greater than 0.3,
we had 132 of those were positive and 7 of those were negative. For sample correlations with
absolute values greater than 0.4, we had 68 of those were positive and 1 of those was negative. All
of 23 sample correlations with absolute values greater than 0.5 were positive. To justify whether
a non-fully symmetric space-time covariance model was more appropriate than a full symmetric
space-time covariance model, we collected the values of C(si−sj, 1) for those greater than 0.4. We
plotted these values along the direction parallel to r (Figrue 6(a)) and along the counterclockwise
direction vertical to r (Figrue 6(b), i.e., the angle of r plus π/2). We found that most of large
C(si− sj, 1) values were at the oppsite direction of r, indicating that the sample correlations were
not symmetric along r. Along the direction vertical to r, we found that large C(si − sj, 1) values
were almost symmetric. Therefore, we concluded that our model was more appropriate than a
fully symmetric model in the analysis of the data set.
4.2 Irish Wind Speed Data
We also applied our M to the Irish wind speed data set, which is available in the R package gstat.
The data set contained the daily average wind speeds from 1961 to 1978 at 12 stations in Ireland.
As recommended by Gneiting (2002), we removed Rosslare in our analysis. The whole period
19
Figure 8: A typical North Atlantic low-pressure area moving across Ireland (obtained from
Wikipedia)
of the data has been previously analyzed by many authors (Fonseca and Steel, 2011; Gneiting,
2002; Stein, 2005, e.g.). In order to understand the non-fully symmetry, we focused on the wind
speed in July 1961. The final data contained 11 stations in 31 days. The size of the data was
n = 11× 31 = 341. Following Haslett and Raftery (1989), we used the square root transformation
of the wind speed because this transformation made the data nearly Gaussian. After that, we
obtained the response values by removing the station averages. We computed the MLEs of η
and θ by exactly the same method that we displayed in the previous data. We had η = 0.0471
and θ = (ν1, 1/a1, ν2, 1/a2, r1, r2) = (0.6353, 645.2, 0.8694, 0.7421,−0.6644, 0.3963). The estimated
model was nonseparable as r = 0.
5 Discussion
The article proposes an approach to constructing a non-fully symmetric space-time Matern cor-
relation function based on an arbitrary spatial Matern margin and an arbitrary temporal Matern
margin. The basic idea is to use the spectral densities of the two margins to construct the spectral
density of a space-time correlation model. A seperable model is derived if the dependence between
the two margins is ignored, while a nonseparable model is derived if the dependence is taken into
account. Since a closed form formula generally do not exist, it is important to provide a Taylor
expansion for the model such that numerical values can be computed.
Although the space-time Matern model is focused on, the proposed approach can be used to
20

construct other models. Theoretically, for any given A(h, u) in Theorem 1, infinite families of Z1
and Z2 can be selected. Therefore, the proposed approach can be used to construct infinite many
space-time correlation models, where one of those is the space-time Matern model that has been
discussed in the article. The nonseparable space-time Matern model contains two smoothness
parameters, two scale parameters, and a vector correlation parameter. The vector correlation
parameter provides the direction for dependence between space and time. The space-time de-
pendence is symmetric if the change of spatial locations belongs to the orthogonal space of the
correlation parameter; otherwise, non-full symmetry appears.
The significant difference between our proposed model and many previous models is the non-
full symmetry. The proposed approach directly provides a non-fully symmetric spectral density
in the space-time domain. One does not need to consider a way to make a space-time correlation
function non-fully symmetric via a certain transformation. As our model contains the separable
Matern correlation model as a special case, the justification of separability of spatiotemporal data
in geostatistics can be possibly defined as a hypothesis testing problem, and this is an interesting
and important research topic in the future.
A Proofs
Proof of Theorem 1: Let F be the spectral distribution of A(h, u). Without the loss of generality,
assume F is a probability measure, which is generated by a random vector x1 ∈ Rd and X2 ∈ R.
If (x1, X2) is independent of (Z1, Z2), then
A(hZ1, uZ2) = E(ei(Z1hTx1+Z2uX2)|Z1, Z2
)and
C(h, u) =
∫ ∞
0
∫ ∞
0
E[ei(z1h
Tx1+z2uX2)]G(dz1, dz2)
=E[E(ei(h
Tx1Z1+uX2Z2))|Z1, Z2
]=E
(ei(h
Tx1Z1+uX2Z2)).
Therefore, C(h, u) is a characteristic function of x1Z1 and X2Z2, implying that C(h, u) is a valid
space-time correlation function. If F is not a probability measure, then C(h, u) is a covariance
function but not a correlation function. ♢
21

Proof of Theorem 2: The sufficiency is directly implied by the expression of C(h, u). For the
necessity, if C(h, u) is separable then, using the uniqueness of the inverse Fourier transformation,
we conclude that Z1x1 and Z2X2 are independent. Since (x1, X2), Z1, and Z2 are independent,
(Z1x1, Z1) is independent of Z2 and (Z2x2, Z2) is independent of Z1. Let z1 and z2 be real values
such that P (Z1 ∈ dz1) and P (Z2 ∈ dz2) are positive if |dz1| and |dz2|, the Lebesgue measures of
dz1 and dz2 respectively, are positive. For any B1 ∈ B(Rd) and B2 ∈ B(R),
P (x1 ∈ B1, X2 ∈ B2)
= lim|dz1|→0,|dz2|→0
P (Z1x1 ∈ z1B1, Z2X2 ∈ z2B2|Z1 ∈ dz1, Z2 ∈ dz2)
= lim|dz1|→0,|dz2|→0
P (Z1x1 ∈ z1B1, Z2X2 ∈ z2B2, Z1 ∈ dz1, Z2 ∈ dz2)
P (Z1 ∈ dz1, Z2 ∈ dz2)
= lim|dz1|→0,|dz2|→0
P (Z1x1 ∈ z1B1, Z1 ∈ dz1)P (Z2X2 ∈ z2B2, Z2 ∈ dz2)
P (Z1 ∈ dz1)P (Z2 ∈ dz2)
= lim|dz1|→0,|dz2|→0
P (Z1x1 ∈ z1B1|Z1 ∈ dz1)P (Z2X2 ∈ z2B2|Z2 ∈ dz2)
=P (x1 ∈ B1)P (X2 ∈ B2).
Therefore, x1 and X2 are independent, implying that A(h, u) is separable. ♢
Proof of Theorem 3: The joint PDF of (u, V ) is
f1(u, v) =vν−1
2ν+d2π
d2Γ(ν)
e−12(∥u∥2+v).
The inverse transformation of (x, V ) = (au/√V , V ) is (u, v) = (
√V x/a, V ). The corresponding
Jacabian determinant is (V/a)d2 . The joint PDF of (x, V ) is
f2(x, v) =vν+
d2−1
2ν+d2a
d2π
d2Γ(ν)
e−12(1+
∥x∥2
a2)v.
Integrationg out v in f2(x, v), we obtain the marginal PDF of x, which is md(x|ν, a), implying
that the characteristic function of x is Md(h|ν, a). ♢
Proof of Corollary 1: Straightforwardly, there is
Md(h|ν, a) = E(eih
Tx)= E
[E(eih
T (au/√V )|V
)]= E
(e−
a2∥h∥22V
),
which yields (8). ♢
Proof of Lemma 1: The conclusion is implied by comparing
Mr,a1,a2,ν1,ν2(h, u) = E
(e−a1a2ur
T h√V1V2 e
− 12(a21∥h∥2
V1+
a22u2
V2)
)
22

with
Md(h|ν1, a1)M1(h|ν2, a2) = E(e− 1
2(a21∥h∥2
V1+
a22u2
V2)
),
since it is drawn by looking at the sign of rTh. ♢
Proof of Theorem 4: The necessary and sufficient conditions for Mr,a1,a2,ν1,ν2 to be separable
is implied by Theorem 2. The sufficiency of full symmetry is concluded using the definition of
Mr,a1,a2,ν1,ν2 . If d ≥ 2 then the necessity of full symmetry is implied by (11). If d = 1, then the
necessity of full symmetry is implied by (12). ♢
Proof of Theorem 5: The conclusion for α > 0 can be directly implied by (9). If α < 0 and
z = 0, using variable transformation w = z2/v in the integral expression of Dα(z) there is
Dα(z) = |z|2α∫ ∞
0
w−α−1e−12( z
2
w+w)dw = z2α
∫ ∞
0
w|α|−1e−12( z
2
w+w)dw = |z|2αD|α|(|z|),
implying the conclusion for α < 0. If α = 0, then
D0(z) =2
z2
∫ ∞
0
ve−v2 de−
z2
2v =2
z2
[∫ ∞
0
(v2− 1)e−
12( z
2
v+v)dv
]=
2
z2D2(z)−
1
z2D1(z),
implying the conclusion for α = 0. ♢
Proof of Corollary 2: If α < 0 then |z|2βDα(z) = 2|α|Γ(|α|)|z|2(β+α)M|α|(|z|) implying that it is
continuous in z ∈ R. Write
|z|2βD0(z) = |z|2β∫ 1
0
v−1e−12( z
2
v+v)dv + |z|2β
∫ ∞
1
v−1e−12( z
2
v+v)dv. (33)
The second term on the right side of (33) is continuous in z ∈ R. For any β > γ > 0, the first
term is dominated by
|z|2β∫ ∞
0
v−γ−1e−12( z
2
v+v)dz = |z|2βD−γ(z),
which is continuous in all z ∈ R. Letting γ → 0 and using the Dominated Convergence Theorem,
we conclude that the first term on the right side of (33) is also continuous in all z ∈ R. ♢
Proof of Theorem 6: If n > 2(ν1 ∨ n2), then
dn,ν1(a1∥h∥) = 2n2−ν1Γ(
n
2− ν1)(a1∥h∥)2ν1Mn
2−ν1(a1∥h∥)
and
dn,ν2(a2|u|) = 2n2−ν2Γ(
n
2− ν2)(a2|u|)2ν2Mn
2−ν2(a2|u|),
implying that
bn,r,a1,a2,ν1,ν2(h, u) =(−1)n(u0r
T0 h0)
n(a1∥h∥)2ν1(a2|u|)2ν222(ν1+ν2)Γ(ν1)Γ(ν2)
cn,ν1,ν2(a1∥h∥, a2|u|, ∥r∥),
23

where
cn,ν1,ν2(z1, z2, r) =2nrnΓ(n
2− ν1)Γ(
n2− ν2)
n!Mn
2−ν1(z1)Mn
2−ν2(z2), z1, z2, r > 0.
Note that
|bn,r,a1,a2,ν1,ν2(h, u)| ≤(a1∥h∥)2ν1(a2|u|)2ν222(ν1+ν2)Γ(ν1)Γ(ν2)
cn,ν1,ν2(a1∥h∥, a2|u|, ∥r∥)
and
cn,ν1,ν2(z1, z2, r) ≤ cn,ν1,ν2(r) =2nrnΓ(n
2− ν1)Γ(
n2− ν2)
n!, n > 2(ν1 ∨ ν2).
It is enough to show the uniform convergence of∑∞
n=[2(ν1∨n2)]+1] cn,ν1,ν2(r) in r ∈ [0, 1− ϵ] for any
0 < ϵ < 1. Using Stirling’s approximation that Γ(z) ≈√2πe−zzz−
12 (1 + o(1)) for sufficiently large
z, there is
limn→∞
cn+1,ν1,ν2(r)
cn,ν1,ν2(r)= lim
n→∞
2rΓ(n+12
− ν1)Γ(n+12
− ν2)
(n+ 1)Γ(n2− ν1)Γ(
n2− ν2)
= limn→∞
2r
n+ 1
(n+12
− ν1)n2−ν1(n+1
2− ν2)
n2−ν2e−(n+1−ν1−ν2)
(n2− ν1)
n−12
−ν1(n2− ν2)
n−12
−ν2e−(n−ν1−ν2)
= limn→∞
2r(n+12
− ν1)12 (n+1
2− ν2)
12
(n+ 1)e
(1 +
1
n− 2ν1
)n−12
−ν1 (1 +
1
n− 2ν2
)n−12
−ν2
=r.
Therefore,∑∞
n=[2(ν1∨ν2)]+1 dn,ν1,ν2(r) uniformly converges in r ≤ [0, 1 − ϵ] for any 0 < ϵ < 1,
implying that the right size of (14) absolutely uniformly converges in h ∈ Rd, u ∈ R, r ∈ Rd with
∥r∥ ≤ 1− ϵ for any 0 < ϵ < 1. ♢
References
Bochner, S. (1955). Harmonic Analysis and the Theory of Probability, Berkeley and Los Angeles:
University of California Press.
Brown, P., Karesen, K., Tonellato, G.O.R.S. (2000). Blur-generated nonseparable space-time mod-
els. Journal of Royal Statistical Society Series B, 62, 847-860.
Cressie, N. and Huang, H.C. (1999). Classes of nonseparable, spatio-temporal stationary covariance
functions. Journal of the American Statistical Association, 94, 1330–1340.
De Iaco, S., Myers, D., and Posa, D. (2001). Space-time analysis using a general product-sum
model. Statistics and Probability Letters, 52, 21-28.
24
De Iaco, S., Myers, D., and Posa, D. (2002). Nonseparable space-time covariance models: Some
parametric families. Mathematical Geology, 34, 23-41.
De Iaco, S., Posa, D., and Myers, D. (2013). Characteristics of some classes of Space-time covari-
ance functions. Journal of Statistical Planning and Inference, 143, 2002-2015.
De Iaco, S. and Posa, D. (2013). Positive and negative non-separability for space-time covariance
models. Journal of Statistical Planning and Inference, 143, 378-391.
Devroye, L. (1990). A note on Linnik distribution. Statistics and Probability Letters, 9, 305-306.
Fonseca, T.C.O. and Steel, M.F.J. (2011). A general class of nonseparable space-time correlation
functions. Environmentrics, 22, 224-242.
Fuentes, M. (2006). Testing for separability of spatial-temporal covariance functions. Journal of
Statistical Planning and Inference, 136, 447-466.
Gneiting, T. (2002). Nonseparable, stationary covariance functions for space-time data. Journal
of the American Statistical Association, 97, 590–600.
Gneiting, T., Genton, M.G., Guttorp, P. (2007). Geostatistical space-time models, stationarity,
separability, and full symmetry. In Statistical Methods for Spatiotemporal Systems, Finkenstadt,
B., Held, L., and Lsham, V. (eds). Chapman & Hall/CRC, 151-175.
Guttorp, P. and Gneiting, T. (2006). Studies in the history of probability and statistics XLIX: On
the Matern correlation family. Biometrika, 93, 989-995.
Handcock, M.S., and Stein, M.L. (1993). A Bayesian analysis of Kriging. Technometrics, 35,
403-410.
Haslett, J., and Raftery, A.E. (1989). Space-time modeling with long-memory dependence: assess-
ing Ireland’s wind power resources (with discussion). Applied Statistics, 38, 1-50.
Kolovos, A., Christakos, G., Hristopulos, D., and Serre, M. (2004). Methods for generating
non-separable spatiotemporal covariance models with potential environmental applications. Ad-
vances in Water Resources, 27, 815-830.
25
Kyriakidis, P.C. and Journel, A.G. (1999). Geostatistical space-time models: a review. Mathemat-
ical Geology, 31, 651-684.
Lee, D. and Shaddick, G. (2010). Spatial modeling of air pollution in studies of its short-term
health effects. Biometrics, 66, 1238-1246.
Li, B., Genton, M.G., Sherman, M. (2007). A nonparametric assessment of properties of space-time
covariance functions. Journal of the American Statistical Association, 102, 736-744.
Ma, C. (2002). Spatio-temporal covariance functions generated by mixtures.Mathematical Geology,
34, 965-975.
Ma, C. (2003). Families of spato-temporal stationary covariance models. Journal of Statistical
Planning and Inference, 116, 489-501.
Ma, C. (2003). Spatiotemporal stationary covariance models. Journal of Multivariate Analysis,
86, 97-107.
Ma, C. (2005). Linear combinations of space-time covariance functions and variograms. IEEE
Transactions on signal processing, 53, 857-864.
Mateu, J., Porcu, E., Gregori, P. (2008). Recent advances to model anisotropic space-time data.
Statistical Methods and Applications, 17, 209-223.
Matern, B. (1986). Spatial Variation (2nd ed.), Berlin: Springer-Verlag.
Mitchell M, Genton MG, Gumpertz M. (2005). Testing for separability of space-time covariances.
Environmetrics, 16, 819-831.
North, G., Wang, J. and Genton, M. (2011). Correlation models for temperature fields. Journal
of Climate, 24, 5850–5862.
Patefield, W.M. (1977). On the maximized likelihood function. Sankhya Series B, 39, 92-96.
Porcu, E., Gregori, P., Mateu, J. (2006). Nonseparable stationary anisotropic space-time covari-
ance functions. Stochastic Environmental Research and Risk Assessment, 21, 113-122.
26
Porcu, E., Mateu, J., and Saura, F. (2008). New classes of covariance and spectral density functions
for spatio-temporal modelling. Stochastic Environmental Research and Risk Assessment, 22, 65-
79.
Rodrigues, A. and Diggle, P. (2010). A class of convolution-based models for spatiotemporal
processes with non-separable covariance structure. Scandinavian Journal of Statistics, 37, 553-
567.
Scaccia, L. and Martin, R.J. (2005). Testing axial symmetry and separability of lattice processes.
Journal of Statistical Planning and Inference, 131, 19-39.
Shao, X. and Li, B., (2009). A tuning parameter free test for properties of spacetime covariance
functions. Journal of Statistical Planning and Inference, 139, 4031-4038.
Stein, M.L. (1999). Interpolation of Spatial Data. Some Theory for Kriging. New York: Springer-
Verlag.
Stein, M.L. (2005). Space-Time Covariance Functions. Journal of the American Statistical Asso-
ciation, 100, 310–321.
27





























