Embed Size (px)
Citation preview

Nonaxisymmetric experimental modal analysis and
control of resistive wall MHD in RFPs
System identification and feedback control for the reversed-field pinch
K ERIK J OLOFSSON
Doctoral Thesis
Stockholm, Sweden 2012

TRITA-EE 2012:020ISSN 1653-5146ISBN 978-91-7501-359-6
KTH School of Electrical Engineering (EES)SE-100 44 Stockholm
Sweden
Akademisk avhandling som med tillstånd av Kungl Tekniska högskolan framläggestill offentlig granskning för avläggande av Teknologie doktorsexamen i fysikaliskelektroteknik fredagen den 1:a Juni 2012 klockan 10.00 i Sal F3, Lindstedtsvägen26, Kungliga Tekniska Högskolan, Stockholm.
© K Erik J Olofsson, April 27, 2012 (document build date)
Tryck: Universitetsservice US AB

iii
Abstract
The reversed-field pinch (RFP) is a device for magnetic confinement offusion plasmas. The main objective of fusion plasma research is to realisecost-effective thermonuclear fusion power plants. The RFP is highly unstableas can be explained by the theory of magnetohydrodynamics (MHD). Feed-back control technology appears to enable a robustly stable RFP operation.Experimental control and identification of nonaxisymmetric multimode MHDis pursued in this thesis. It is shown that nonparametric multivariate identifi-cation methods can be utilised to estimate MHD spectral characteristics fromplant-friendly closed-loop operational input-output data. It is also shown thataccurate tracking of the radial magnetic field boundary condition is experi-mentally possible in the RFP. These results appear generically useful as toolsin both control and physics research in magnetic confinement fusion.


List of papers
The following peer-reviewed papers are appended to this comprehensive summarythesis.
I K.E.J. Olofsson and P.R. Brunsell, Controlled magnetohydrodynamic mode sus-tainment in the reversed-field pinch: theory, design and experiments, FusionEngineering and Design, online January 2009,http://dx.doi.org/10.1016/j.fusengdes.2008.11.052
II K.E.J. Olofsson, H. Hjalmarsson, C.R. Rojas, P.R. Brunsell and J.R. Drake, Vec-tor dither experiment design and direct parametric identification of reversed-field pinch normal modes, Proceedings of the 48th IEEE Conference on Deci-sion and Control, December 2009,http://dx.doi.org/10.1109/CDC.2009.5400016
III K.E.J. Olofsson, P.R. Brunsell, J.R. Drake, C.R. Rojas and H. Hjalmars-son, Predictor-based multivariable closed-loop system identification of the EX-TRAP T2R reversed field pinch external plasma response, Plasma Physics andControlled Fusion, online May 2011,http://dx.doi.org/10.1088/0741-3335/53/8/084003
IV K.E.J. Olofsson, C.R. Rojas, H. Hjalmarsson, P.R. Brunsell and J.R. Drake,Cascade and multibatch subspace system identification for multivariate vacuum-plasma response characterisation, Proceedings of the 50th IEEE Conferenceon Decision and Control, December 2011,http://dx.doi.org/10.1109/CDC.2011.6160440
V K.E.J. Olofsson, P.R. Brunsell and J.R. Drake, Measurements of the vacuum-plasma response in EXTRAP T2R using generic closed-loop subspace systemidentification, Fusion Engineering and Design, accepted April 2012,http://dx.doi.org/10.1016/j.fusengdes.2012.04.001
VI K.E.J. Olofsson, P.R. Brunsell, J.R. Drake and L. Frassinetti, A first attemptat few-coils and low-coverage RWM stabilisation of EXTRAP T2R, PlasmaPhysics and Controlled Fusion, accepted February 2012,http://dx.doi.org/TBA
v

vi LIST OF PAPERS
Further publications by the author can be found in the bibliography and insection 5 below.

Acknowledgements
Can we fix it, yes we can!
Bob the Builder
The author expresses cordial appreciation for the encouragement and resourcesto pursue this research. Many thanks to supervisor and employer Per Brunsell;allowing a free-spirit approach to the topic turned out to be productive. Jim Drakehas provided (highly) important enthusiastic support, numerous creative interpre-tations, and interesting discussions. The opportunity to repeatedly pick and pollthe diligent brain of Cristian Rojas has been invaluable. Huge credit to EmmanuelWitrant for the initial nudge into the control community and for hosting a too-short stay in Grenoble. Kudos to Håkan Hjalmarsson for using some of his timeto aid this work. It has been both constructive and (very) pleasant to share officewith Lorenzo Frassinetti. The brief visit to the RFX-mod laboratory in Padova,arranged by Anton Soppelsa, was both inspiring and instructive. Early discussionswith Yueqiang Liu at Chalmers in Göteborg (now at Culham Centre for FusionEnergy) have played an important role for the perspective of the thesis. Our tech-nicians in general, and in particular Håkan Ferm, must be given credit for keepingthat jalopy EXTRAP T2R alive. The occasional chats with fellow doctoral can-didates have always been most enjoyable. Extra thanks to Susanna Lidström forproof-reading parts of the manuscript.
This thesis is dedicated to Kjell and Elisabeth.
vii

Contents
List of papers v
Acknowledgements vii
Contents viii
1 Summary and main results 11.1 What is the point of this research? . . . . . . . . . . . . . . . . . . . 11.2 Summary and key findings . . . . . . . . . . . . . . . . . . . . . . . . 31.3 What is the take-home message? . . . . . . . . . . . . . . . . . . . . 5
2 Magnetic confinement thermonuclear fusion 72.1 Fusion and energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.2 Thermonuclear fusion reactor approaches . . . . . . . . . . . . . . . 92.3 The tokamak . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.4 The reversed-field pinch . . . . . . . . . . . . . . . . . . . . . . . . . 132.5 On automatic control in MCF . . . . . . . . . . . . . . . . . . . . . . 15
3 Experimental modal analysis and control 193.1 System identification . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.1.1 Standard multivariate LTI system representations . . . . . . 223.1.2 A predictor-form SIM . . . . . . . . . . . . . . . . . . . . . . 233.1.3 Something on input design . . . . . . . . . . . . . . . . . . . 263.1.4 Closed-loop dither injection . . . . . . . . . . . . . . . . . . . 30
3.2 Modal analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 313.2.1 A one-dimensional diffusion toy example . . . . . . . . . . . . 323.2.2 EMA illustrated for the toy example . . . . . . . . . . . . . . 343.2.3 The bootstrap and the MBOSS method . . . . . . . . . . . . 36
3.3 Automatic control . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.3.1 Control of systems in general and in short . . . . . . . . . . . 383.3.2 The control loop & T2R . . . . . . . . . . . . . . . . . . . . . 403.3.3 Formalisation of control objectives . . . . . . . . . . . . . . . 423.3.4 Two semiclassical ideas used in the thesis . . . . . . . . . . . 44
viii

CONTENTS ix
4 Resistive wall MHD in EXTRAP T2R 454.1 The nonparametric empirical result . . . . . . . . . . . . . . . . . . . 454.2 The ideal shell-diffusive MHD spectra . . . . . . . . . . . . . . . . . 484.3 More general resistive MHD spectra . . . . . . . . . . . . . . . . . . 514.4 Experimental output-tracking results . . . . . . . . . . . . . . . . . . 52
5 On the paperwork 575.1 Overview and chronology . . . . . . . . . . . . . . . . . . . . . . . . 575.2 Article remarks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 595.3 Implementation, deployment and realisation . . . . . . . . . . . . . . 61
6 Conclusions and outlook 636.1 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 636.2 Outlook . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
A Supplementary material 65A.1 Basic ideal MHD stability with cylindrical shell . . . . . . . . . . . . 65A.2 A cascade vacuum-plasma response separation . . . . . . . . . . . . 67A.3 Basic eigenproblem for viscoresistive MHD . . . . . . . . . . . . . . . 68A.4 Derivation of the adjoint gradient in paper VI . . . . . . . . . . . . . 70
B Toroidal geometry and (non-)axisymmetry 73
C Some (recurring) symbols and abbreviations 77
Bibliography 81


Chapter 1
Summary and main results
This comprehensive summary thesis is organised as follows. Introductory subsec-tions 1.1, 1.2 and 1.3 jointly overview the motivation and main results. Section 2briefly introduces thermonuclear fusion in general and magnetic confinement fusionin particular. Section 3 explains in some detail the various methods used for modalanalysis and control. Supposedly illuminating toy examples are intended to aug-ment the presentation here. Section 4 shows (i) important empirical results and(ii) theoretical spectral comparisons for the present experimental application. Thelist of relevant articles, both included and omitted, are briefly outlined in section5. Section 6 communicates the conclusions and an outlook. This is followed by ap-pendix A containing supplementary material (to complement the publications andto provide some background). Appendix B reviews the basic geometry of magneticconfinement fusion. A glossary is found in appendix C. The included articles areappended after the bibliography.
1.1 What is the point of this research?
Now there is one outstandinglyimportant fact regardingSpaceship Earth, and that is thatno instruction book came with it.
Buckminster Fuller (1895-1983)
Humanity is consuming resources at a rate which does not appear sustainable[1, 2]. Sustainable development is a concept often summarised as in the Brundtlandreport from 1987 [2]: “development that meets the needs of the present withoutcompromising the ability of future generations to meet their needs”. In particular,today’s energy production is not sustainable. Bulk energy production is largelyoriginating from fossil fuels [3]. These hydrocarbon and coals repositories are de-cidedly finite. Naive large-scale long-term use of them seems to have a significant
1

2 CHAPTER 1. SUMMARY AND MAIN RESULTS
impact on the global climate with uncertain but dire consequences. Dependenceon (geological) petroleums, natural gas and coals, will have to be phased out in thefuture. The repercussions of the anthropocene epoch appear to compromise alsoother boundaries of a proposed safe (allowed) operating space for humanity [4]. Atthe moment, the corpus of science is not capable of accurately forecasting whatthe planet-scale impact of this general wastefulness will be. What seems clear isthat regulation and economic incentives need to be aligned towards responsible far-sighted “sustainability”. In the Stern review [5] it is argued that climate change isessentially a serious market failure of present economic development, but that thereis still time to avoid the presumably worst impacts by immediate strong actionsand economic realignment.
Controlled thermonuclear fusion appears to be a potentially ultimate technologyfor (virtually) sustainable energy production [6, 7]. To quantify the sustainability(and allure) of thermonuclear fusion, consider that the fuel can be extracted fromcommon seawater [8] anywhere on earth. A full fleet of fusion power plants couldsustain a population of 60 billion people for 1 million years where each individual isapportioned a full 100 times the wattage an average north american is using today[9]. This may be worth investments of both time and money. More than fifty yearsof research have already been invested [10].
The most advanced concept towards a thermonuclear fusion reactor is arguablythe tokamak [11, 12, 13]. In fact it has already reached the required reaction [14, 15](TFTR 1994 Princeton, USA and JET 1997 Culham, UK [16]), albeit transiently, asdedicated machines are needed for proper burn experimentation. It is the purposeof the ITER project to realise near steady-state fusion burn [17, 18].
One problem that appears as the efficiency of the power production in the toka-mak is optimised, is that the plasma (here a fully ionised hydrogen gas) it confinesby using strong magnetic fields, goes unstable. More power could be extractedmore efficiently if these unstable “modes” could be stabilised. One particular classof modes is known as resistive wall modes (RWMs) [19]. RWMs are of globalnonaxisymmetric character and their growth require time-dependent magnetic fluxthrough the external conducting wall. Hence RWMs evolve on a time-scale set bythe wall eddy time-constant. It seems possible to reliably stabilise RWMs usingfeedback control techniques.
This thesis revolves around this particular type of instability. The point ofthis research is to develop methods to handle reactor relevant plasma instabilitiesin magnetic confinement fusion experiments. The research is carried out on anapparatus called a reversed-field pinch (RFP) which is believed to exhibit similardynamical properties as would a tokamak reactor with respect to the these modes.In fact the RFP is even more unstable than the tokamak in this sense. The resultsin the thesis are mainly of experimental and empirical character.

1.2. SUMMARY AND KEY FINDINGS 3
1.2 Summary and key findings
Measure twice and cut once.
General proverb
The thesis aims to suggest the potential impact and importance of techniquesfor achieving convergence of physics-based model-knowledge with supposedly un-prejudiced empirical evidence, in the field of magnetic confinement fusion (MCF). Itis a nontrivial problem to develop models of MCF stability dynamics that have reli-ably predictive capabilities. The work herein attempts to (i) augment the availablerepertoire of methods used to approach this model-building and (ii) exploit modelsfor feedback control design in MCF. In particular it is the nonaxisymmetric grossmagnetohydrodynamic (MHD) stability subject to a resistive wall boundary condi-tion that is studied. Due to the accessibility of the small-scale reversed-field pinch(RFP) MCF experiment EXTRAP T2R1 (T2R) [20, 21] it has been possible to iter-atively develop and reality-check both dynamical systems estimation/identificationand control synthesis techniques. The angle-of-attack has been largely experimen-tal and it must be re-emphasised that the bulk of the results in the thesis inheritsmost weight from their experimental realisation.
To be able to do empirical nonaxisymmetric MHD stability control, focus hashad to be split between MHD stability and automatic control research. Thesefields are typically nonoverlapping in both mindset and notation. In the end thiswork has been mostly coloured by linear systems theory rather than teachings inelectrophysics. The reason for this is the (not from the outset apparent) ambition toapproach experimental modal analysis (EMA) in a generic manner without invokingprior MHD knowledge. It is shown in the papers below that this indeed is possible,and it can be argued that this is a strong result.
As stated above, it appears possible and useful to partition the thesis into twotypes of tasks.
1. Construction of MHD stability models using a (semi- and full) empirical ap-proach,
2. Exploitation of the models to tune feedback control loops and algorithms.
As practical wisdom has it, plan and spend most time to do the measurements.Then apply the consequences of the results of the measurements. The results ofmisapplications due to mismeasurements can be very dissappointing, even destruc-tive. English idiomatics prescribes a measure-over-cut labour ratio of 2 : 1 whereasin Russia it seems to be 7 : 1. More specifically, this appears to hold true in in-dustrial automatic control projects [22]. A dominant fraction (∼ Russian order of
1Located in the main Campus of the Royal Institute of Technology (KTH) in Stockholm,Sweden.

4 CHAPTER 1. SUMMARY AND MAIN RESULTS
magnitude) of the total deployment time goes into the modeling-measuring stage.No surprise here for practical people.
Results from instances of the work-template above have already proven them-selves useful for more generic MHD physics studies. It is widely recognised thatautomatic control is an “enabling technology” [23, 24]. A novel capability of T2Rthus enabled is “output-tracking” of the radial magnetic field boundary condition.This has already been exploited to accurately strike and sustain various spatialMHD harmonics in order to study some nonlinear effects internal to the plasma[25, 26, 27, 28]. These studies are not the topic of this thesis. But the knownimpact of this work acts back to motivate it.
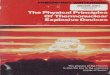
Figure 1.1 is a flowchart-like representation of the thesis project. The key stepdepicted is to stabilise T2R. “Reliable” stabilisation and the dense array of actua-tion coils then enables the potential for implementing additional control technologyto act as a more general research instrument. This has been clearly exemplified bythe successful usage of output-tracking alluded to above. The other part of the de-velopment of the experimental toolbox is methods and means for empirical plasmaresponse measurements supposed to directly provide better information also forpossible updates of the stabilising feedback loop itself. This is “control-relevant”and illustrated by the arrow pointing back to the starting task of stability in theillustration.
In summary the main contribution of this thesis are as follows.
• For the EXTRAP T2R external RFP plasma response, maximisation of pre-dictive power subject to linear dynamics leads to MHD-like spectral charac-teristics.
• General nonaxisymmetric and “model-independent” MHD experimental modalanalysis performed under safe stabilised operation.
• The introduction and application of closed-loop system identification in MHDresearch.
• Signal processing toolkit development and implementation required for theabove.
• Some formal methods of control tuning for nonaxisymmetric MHD.
• Feedback-clamping of RFP boundary conditions to enable novel experimentalcampaigns. Feedback-enabled research capabilities.
• Suggesting a complementary path towards realistic model-based control ofreactor-relevant RWM instabilities.
• Suggesting methods to handle noisy signals and unmodeled or neglected dy-namics in gross MHD stability.

1.3. WHAT IS THE TAKE-HOME MESSAGE? 5
stabilise
stabilise
& dither
stabilise
& track
experiment
toolkit
refined
tuning
general
control
basic capability
enable new
studies
Figure 1.1: Development of the EXTRAP T2R experimental capabilities. The basicfunctionality is stabilisation. Control-technological features on top of the stabilisingloop then enables novel physics studies (feedback-clamped magnetic field boundaryconditions) and also the acquisition of data from perturbed stabilised operation.The latter experiment (dithering) has led to possibly useful means of empiricalplasma response measurements. The implied empirical models naturally can bereiterated to retool the basic stabilising control system itself.
The thesis is based on work which is represented by (projected onto) the pub-lications [29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43]. These are allfirst-author publications. A subset of these are included in the paper section belowand are intended to suggest and convey the main itemised results listed above.
1.3 What is the take-home message?
Nonaxisymmetric magnetohydrodynamic stability properties of magnetic confine-ment thermonuclear fusion plasmas will probably need to be modified by real-timecomputation in a feedback loop setup. This computation is likely to be foundedon some physics-based parameterisation and semi-empirical tuning. Consistent androbust stability-performance of feedback control systems may well become mission-

6 CHAPTER 1. SUMMARY AND MAIN RESULTS
critical for the realisation of commercially viable fusion power plants. Therefore thedevelopment of automatic control relevant empirical system identification tools forreversed-field pinch stability seems to be generically reactor relevant. Operationalstabilisation, extremum-seeking and adaptive control, monitoring and fault detec-tion applications may all be envisioned. To plausibly succeed with this a hybridcontrol-physics approach looks useful. Physics-modeling should focus on predic-tive qualitites and bounding of uncertainties since these are required to formulaterelevant robust control objectives.

Chapter 2
Magnetic confinementthermonuclear fusion
A century from now there will betwo prime sources of energy -nuclear fusion and solar powercollected in space.
Isaac Asimov (1920-1992)
2.1 Fusion and energy
It was mentioned in subsection 1.1 that fusion power appears fully sustainable.This may be the case when the deuterium-deuterium (D-D) reactor is considered.See (2.1) below for a listing of thermonuclear reactions involving deuterium. The“virtually limitless” numbers were summarising this ideal D-D scenario. Howeverthe nuclear reaction that currently seems feasible is the fusion of deuterium andtritium (D-T) [44]. D-T requires less thermal energy around the optimal cross-section than does D-D. Since tritium is not found in nature in any significantamounts (it is radioactive with a short half-life of about 12 years) the requirementis to exploit a so-called breeding reaction (2.2) based on capturing neutrons inlithium (neutrons from the fusion reaction itself that is). Tritium breeding modulesare to be embedded into the surrounding blanket of the fusion power core of areactor. Thus the power station should be self-sufficient with respect to tritium.This is advantageous also from a nuclear safety perspective, since the on-site tritiuminventory is limited.
It is not deuterium that limits the potential “sustainability” of D-T fusion power.Nor is it tritium. The D-T reactor needs lithium as explained in the previousparagraph. Lithium is found in nature in significant amounts, but lithium is acrucial material for some types of battery technology and is projected to be in short
7

8 CHAPTER 2. MAGNETIC CONFINEMENT FUSION
supply, or at least contested, within a few decades [45]. The automobile industryis specifically named as the main consumer of lithium (for electric cars) but alsoenergy grid buffering and storage systems will plausibly deploy bulk batteries. Thebasic projections are as follows: if all terrestrial lithium was used for fusion power,it would be depleted before ∼ 103 years (arguably, this cannot be classified asstrongly sustainable). If seawater-extracted lithium were used then it is estimatedthat ∼ 107 years may be available1. These estimates are based on a fleet of about3000 units of unit gigawatt power plants.
This is already orders of magnitude less sustainable than the D-D upper limitscenario of a million years.2 However, the current “sustainability-limit” for D-T fu-sion seems to be below the limit set by lithium. At the moment the best technologyfor neutron multipliers used for the breeder systems requires significant amounts ofberyllium.3 The estimates of [45] suggests that the hypothesised fusion power sta-tion fleet referred to above could not even be started due to insufficient berylliumfor initial loadings. The implication is that current technology for D-T fusion doesnot seem to allow power plant deployment on a scale that makes D-T fusion thedominant baseload supplier of electrical energy in a “strong” sustainability sense.Therefore D-T fusion must be considered as a first step in fusion power developmentwith cheap and efficient D-D reactors as an ultimate goal.
It is interesting to mention also another proposed nuclear reaction involvingdeuterium. It has been suggested that helium-3 can be mined from the surface ofthe moon and used for fuel in fusion power plants. But the D-He-3 (2.1d) reactionis about as difficult to obtain as D-D so it seems at least as futuristic. Or moreso, due to the lunar mining facilities. On the positive side, helium-3-based fusionhas the benefit of not producing many energetic neutrons (as compared to D-T andD-D). Even more “advanced fuel” concepts include the aneutronic hydrogen-boronreaction that may be possible to achieve using the dense plasma focus device [46].
The (mainly) neutronic reactions involving deuterium [47, 48] briefly discussedabove are summarised by the tabulation
D + T → 4He + n + 17.6 MeV (2.1a)
D + D → 3He + n + 3.3 MeV (2.1b)
D + D → T + H + 4.0 MeV (2.1c)
D + 3He → 4He + H + 18.3 MeV (2.1d)
and the breeding of tritium is based on the reactions
6Li + n → 4He + T + 4.8 MeV (2.2a)7Li + n → 4He + T + n − 2.5 MeV (2.2b)
1Amounts to epic and maybe unrealistic seawater processing with unknown consequences.2Which is on the order of the current total life-time of the species homo sapiens.3Currently, the main research in neutron-multiplying breeder modules considers (i) helium-
cooled pebble bed (HCPB) designs that rely on beryllium and (ii) helium-cooled lithium-lead(HCLL) arrangements which are not reliant on beryllium but on lead [45]. Some basic aspects ofand requirements on tritium breeding blankets can be found in e.g. [44, Ch.5].

2.2. THERMONUCLEAR FUSION REACTOR APPROACHES 9
For the D-T reaction (2.1a) the optimum fusing temperature turns out to bearond T⋆ ≈ 10 − 20 keV which corresponds to something around 100 − 200 MK(megakelvin) [49]. Temperature is not enough for useful-output fusion however.The product of the confinement time τE and the ion number density n has to begreater than a threshold value which is determined by a power balance argument[12]. For infinite power amplification (ignition) it is required that
nτE & 1.5 × 1020 s/m3 (2.3)
with the extra constraint that T ≈ 1.5 × 108 K. The inequality (2.3) is known asthe Lawson criterion [50].
2.2 Thermonuclear fusion reactor approaches
Today, tomorrow, tokamak.
Unknown origin
In the early atomic heyday the realisation of controlled thermonuclear fusiondid not seem that far away.4 Popular science spoke of “taming the H-bomb”.5
Enthusiastic predictions suggested, in 1958, that fusion power plants would alreadybe online/on-grid in the 1980s [51]. Today the consensus is more towards 2050s.Incidentally this is also what was forecast in a ground-breaking computer game in1995 [52].6 Technology projections, as any other complex forecast, are difficult.
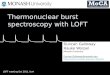
An incomplete map of various proposed reactor engineering approaches to thisdate are summarised in figure 2.1. The four main classes of systems for obtainingthermonuclear fusion are (i) gravitational confinement fusion (GCF) (ii) magneticconfinement (MCF) (iii) inertial confinement (ICF) and (iv) magnetised targetfusion (MTF). The fourth (iv) is a hybrid of MCF and ICF that attempts toachieve cheaper ignition.
4A striking historical-graphical timeline view of the usage of the terms “atomic power”and “thermonuclear” can be generated by using the recent Google Ngram Viewer found athttp://books.google.com/ngrams . Usage of “atomic power” peaks in mid-1950s and “thermonu-clear” peaks early 1960s. In anticipation of later sections, “tokamak” peaks in mid-1980s and isactually passed by “system identification” in mid-1990s in frequency-of-occurence. The “tokamak”peak coincides approximately with the peak of “oil crisis”, perhaps lagging slightly.
5The H-bomb is of course the hydrogen bomb, which uses a conventional fission payload(the A-bomb) to reach the transient fusion of a deuterium to get extra energy release (equiva-lent to multi-megatonnes of trinitrotoluen). Weaponised fusion is not in general categorised as“controlled” thermonuclear fusion. MCF implies confined steady-state nondestructive fusion-burnwith the purpose of generating energy and electricity (though ICF can be viewed as a minia-ture nondestructive detonation). The main fusion fuel in an H-bomb appears to be solid lithiumdeuteride.
6Many commentators seem to say that fusion power will forever be about 30 years in the future.In a recent special report on nuclear energy [53], The Economist writes: “Schemes to make reactorson the same principle [thermonuclear fusion] sprang up immediately. Sixty years on, this line ofresearch continues, at great expense, without any prospect of commercial plausibility”.

10 CHAPTER 2. MAGNETIC CONFINEMENT FUSION
NuclearFusion
MCF
ICF
GCF
MTF
Levitateddipole
Sphericaltokamak
Stellarator
Tokamak
RFP
Teller-Ulam
thermonuclear
weapons
Laser
Stars
Linerimplosion
Spheromaks &FRCs
Dense plasmafocus (DPF)
Acoustic
LDX
FRXL
NIF
LMJ
LiFEHiPER
Omega-EP Orion
SSPXSSX
MAST
NSTX
Quest
LPPX
W7X
LHD
KSTAR
EAST
D3D
JET
ASDEX-U
ITERJT60
Alcator
HBT-EP
DEMO
TFTR
MST
EXTRAP-T2RRFX-mod
KTX
RELAX
General Fusion, Inc.
Photovoltaics
Solar Thermal
Figure 2.1: Various approaches to fusion reactor engineering. Some decommissionedand some yet-to-be-built experiments are included. Most experiments (shown asleafs in the graph) are active. Both mainstream and some fringe concepts included.
All of the branches in the figure somehow try to fulfill the Lawson criterion(2.3) for ignition. GCF is already doing very well (the stars, in particular oursun, are fusing hydrogen continuously) and the technologies in this branch are notreally nuclear but included to re-emphasise the actual origin of solar power. Thetemperatures involved in thermonuclear fusion are compatible with neither solid,nor liquid, nor a gas state of matter. Almost complete thermal ionisation willoccur. The ionised gas-like state is known as a plasma [54, 55]. Not surprisingly,the magnetised-plasma physics of MCF (involving confinement time of unity orderand very low densitites) [56, 57, 58, 59] is meaningful in a quite different regime thanthe high-energy-density physics (HEDP) pursued in ICF (involving subnanosecondconfinement time and densities surpassing that of solid-state) [60, 61].

2.3. THE TOKAMAK 11
2.3 The tokamak
Slowly slowly, form followsfunding.
Clay Shirky (1964-)
As a reference, the typical geometry of MCF is graphically reviewed in sectionB.
In the late 1960s it was announced that Russian researchers had been able toreach (at that time) incredibly hot plasmas (around 1 keV electron temperature) inthe T3 device. This was the hottest ever, by far. When it was later confirmed byindependent measurements of a delegation of British physicists bringing their ownstate-of-the-art diagnostics intruments [62], efforts on thermonuclear fusion becamefocused on the tokamak configuration [63]7. Today the tokamak clearly dominatesMCF approaches to fusion and there are over 30 active tokamaks worldwide, andover 200 documented historically. The longest tokamak pulse has durated severalhours. Full noninductive bootstrap-current has been achieved. Plasma tempera-tures beyond the D-T fusion requirements have been obtained. Significant progresstowards steady-state operation has been recorded [64]. But there is still no reac-tor. Over the years, two classes of tokamaks have branched out (i) conventionaltokamaks and (ii) spherical tokamaks. They are toroidal configurations and dis-tinguished by differing aspect ratios R/a where R is the major radius of the torusand a the approximate minor radius. Spherical tokamaks have an aspect ratioapproaching unity whereas the conventional tokamak has R/a ≈ 2 − 4.
The tokamak hydrogen plasma (as in MCF in general) has a very low density (itis in some sense a poor vacuum). This means that even for burning ITER plasma(see below) temperature of 150 MK the thermal energy density ratio (assuming asteady-state Maxwellian case)8
(32
nkBT
)
boiling−water
/
(32
nkBT
)
ITER
≈ 550 ≫ 1 (2.4)
where kB is the Boltzmann constant, n the number density and T the temperature.So the ITER tokamak has far less stored thermal energy density than you routinelygenerate in your kitchen. But the situation is quite different if one also considersheat- and particle energy fluxes and electromagnetic radiation at the first-wall sur-face of the reaction chamber.9
7Invented in the 1950s by Igor Tamm and Andrei Sahkarov.8Numbers used are as follows. Liquid-state boiling water: n = 33.4 × 1027 m−3, T = 373 K.
ITER plasma: n = 1.5 × 1020 m−3, T = 15 keV = 1.74 × 108 K.9Bremsstrahlung losses appear to become prohibitive for temperatures not much higher than
that for D-D fusion, but at extremely high temperatures in high magnetic fields (possibly beyondtokamak relevance), quantum mechanical effects may alleviate the radiative losses.

12 CHAPTER 2. MAGNETIC CONFINEMENT FUSION
The tokamak relies on a strong externally generated toroidal magnetic field ofseveral teslas. The poloidal field is an order of magnitude smaller than the toroidalfield and is a result of the plasma current which is in the toroidal direction andcan be several mega-amperes in a larger machine. The toroidal field is generatedby superconducting magnets for a reactor-dimensioned tokamak. Otherwise theresistive losses in the toroidal field coils would prohibit net energy gain. Thismakes the tokamak somewhat expensive and adds design complexity due to theneed for a cryostat.
In MCF the basic quantification of fusion efficiency is the β-value [44]. It isdefined as the ratio of kinetic-thermal pressure p = nkBT to the magnetic pressureB2/(2µ0):
β =2µ0p
B2(2.5)
and its value is on the order of 10−2 for the tokamak. High β is always wantedsince it would imply more fusion output for a given magnetic field magnitude.High magnetic fields have a very high engineering cost. High β also leads to MHDinstabilities.
Since the maximum magnetic field strength is determined by super-conductortechnology, the tokamak can be seen as a compromise between plasma stability andengineering complexity. The RFP in subsection 2.4 is strictly less MHD stable butits electro-mechanical engineering appears easier. The stellarator at the other end(see e.g. Wendelstein 7-X [65]) is much more difficult to build but is designed for fullthree-dimensional MHD stability without plasma current (nontransient machine).Due to the limited space in the central core of a spherical tokamak (ST) theremay also be some problems to kit the ST with neutron protection and blankets(its proponents argue for its higher β, and it may be useful as a neutron source inhybrid fission-fusion systems [44]).
The largest tokamak experiment now under construction is the multinationalITER project [18, 66]. ITER is a joint collaboration between seven partners given inalphabetical order: China, European Union, India, Japan, Korea, Russia, USA. Itis being built near Aix-en-Provence in south-east France. ITER is not a commercialpower station but its mission is to demonstrate and develop technologies requiredfor reliable MCF fusion burn. The power amplification Q is nominally equal to 10:ITER should produce 500 MW of fusion power from a mixed-source heating inputof 50 MW. The conceptual designs for a fully-fledged 1 − 2 GW (net electric thistime) tokamak fusion power plant (the DEMO reactor) are planned to be finalisedin parallel to the initial operation of ITER. The ITER first plasma is scheduled for2019. ITER is then planned to run as fusion physics and technology laboratory (andstaff training facility) for about 20 years. With an ambitious fusion programme,the DEMO may be operational in the early 2040s [18]. ITER has a nominal aspectratio of R/a = 6.2 m/2.0 m = 3.1, a toroidal magnetic field strength of 5.3 T anda 15 MA plasma current.
The ITER construciton budget is just above 1 % of the coal-only europe-only

2.4. THE REVERSED-FIELD PINCH 13
levelised cost of electricity during the same time-frame.10 The ITER constructionbudget also turns out to approximately match to the projected cost of the LondonSummer Olympic Games 2012.11
2.4 The reversed-field pinch
It was noticed, among other things, during operation of the ZETA device in the UKin the 1960s that the plasma exhibited some sort of self-stabilisation during shut-down [67]. It turned out that this could be explained by a “relaxation” processtowards a state of minimum energy, subject to a constraint on magnetic helicity[68, 69, 70, 71]. The pinch concept exploiting this self-organised equilibrium12 iscalled the reversed-field pinch (RFP) [72, 73]. Whereas tokamaks are designedfor a safety factor q > 1 the RFP has by relaxation q < 1 (significantly so) and ischaracterised by a broad spectrum of resonant (and nonresonant) MHD instabilities.The safety factor is defined as
q =rBφ
RBθ
(2.6)
where Bφ and Bθ are, respectively the toroidal and poloidal field magnitudes atminor radius r of the MHD equilibrium. The sub-unity q of an RFP thus impliesthat the field lines traverse many times poloidally around the magnetic axis foreach toroidal turn.13 A graphical representation of q can be found in appendix B.
One consequence of the density of localised resistive MHD modes in RFPs is thatoverlapping magnetic islands are formed. This leads to ergodic/stochastic field linesthroughout the plasma volume. And this in turn implies degraded confinement.Since confinement is a first priority when aiming for fusion, the tokamak has beenthe most promising MCF configuration since the late 1960s. The RFP has been an“alternative” concept.
The RFP has been considered in reactor studies, e.g. [74]. It has at least four(potential) advantages compared against the tokamak. It does not require a super-strong externally imposed toroidal magnetic field. It does not disrupt. It has asimple geometry which is engineering-friendly. And it can be heated ohmically upto ignition.
10ITER: 13 × 109 euros. Levelised cost of electricity for standard coal-fired plants: ∼100 euros per MWh. European Union annual generation of electricity from coal: ∼ 1000TWh. Time-frame: ∼ 10 years. Sources: http://ec.europa.eu/energy/observatory andhttp://en.wikipedia.org/wiki/Cost_of_electricity_by_source.
11ITER: 13 × 109 euros. Olympic Delivery Authority: 9.3 × 109 sterling (≈ 11 × 109 euros at1.18 EUR/GBP February 24th 2012).
12It is common to brand these configurations as equilibria. But it is more correct to catagorisethem as steady-states.
13Typically for tokamaks q should be above unity on the magnetic axis and be even higher atthe edge. This is to avoid many of the basic gross MHD instabilities. The name “safety factor”comes from this fact [12].

14 CHAPTER 2. MAGNETIC CONFINEMENT FUSION
Recently RFPs have been rekitted to explore the potential of feedback control ofMHD instabilities. The basic idea was first published by Bishop14 [76] as a methodfor creating a virtual ideally conducting wall (at some surface not necessarily co-inciding with the physical wall). The resistive-wall-induced free boundary modes(i.e. the RWMs) were described some years earlier by Gimblett [77] and furtherinvestigated by Hender and others [78]. Some early RFP experiments with a “thin”resistive wall/shell without nonaxisymmetric feedback was made with the HBTXdevice [79, 80]. The conceived magnetic feedback setup was a tiling of pairs ofcoinciding saddle coils, one sensor loop and one current-carrying loop. By connect-ing the sensor by negative feedback to drive current in the actuator coil it seemedpossible to mimic infinitely prolonged eddy currents in the passive wall. All of thispresupposes that the passive wall itself is thick enough to bring down the idealMHD instability time-scale to an order-of-magnitude suitable for both feasible andeffective feedback action. Some analyses and developments of the basic concept canbe found in e.g. [81, 82].
In 2004-2005 it was shown experimentally that the full range of a RWM-classof instabilities could be hindered to grow for several wall-times in EXTRAP T2R[83, 84]. To do this T2R was equipped with full-coverage saddle coil arrays and afeedback-amplifier system. T2R developments preceding and including this can befound in [85]. Later in 2006 the RFX-mod, now also equipped with MHD controlsaddle coils, started operation and reproduced the T2R result. An illustration ofRFX-mod can be found in section B. Various illustrations of T2R can be foundscattered among the papers below. RFX-mod is a significantly larger high-currentmachine [86, 87, 88] compared to T2R. The RFX team has then led the developmentand introduced significant advancements in “mode-control” [89, 90, 91, 92]. Itwas recently shown to be possible for RFX-mod to run stabilised plasmas withsustained ohmic currents reaching 2 MAs. It seems generally acknowledged thatthe extensive feedback coil arrangements retrofitted to RFX and T2R have madethe RFP an important testbed for MHD automatic control research valuable alsofor tokamak reactor science [93, 94]. Stability-physics research with RFPs suggestsquite conclusively that ideal MHD in a simplified cylindrical geometry provides agood basic description of the dominant RWM instabilities [95] including the effectof feedback [96]. Some recent results using kinetic-fluid hybrid codes corroboratethis [97]. Development of an RFP RWM-control flight simulator exploiting thebelief in these models is reported in [98]. Noteworthy theoretical generalisationsof RFP boundary feedback control to include both ideal and resistive MHD modesinclude the work by Finn and Richardson and others [99, 100] where a two-scalarproportional controller also utilised the tangential magnetic field component tofurther improve the supression of MHD activity (beyond that of an ideal wall).
14Cristopher M. Bishop has since then written textbooks (e.g. in machine learning [75])and is currently working at Microsoft Research in Cambridge (UK), is also a Professor ofComputer Science in Edinburgh, and does science-outreach lecturing, among other thingshttp://research.microsoft.com/en-us/um/people/cmbishop/. An industrious man.

2.5. ON AUTOMATIC CONTROL IN MCF 15
Another modern development of the RFP has been the discovery of nonaxisym-metric relaxed states where it seems that a single dominant state (known as SHAx,single-helical-axis) creates a de-stochastisised central helical region due to intactflux surfaces [101]. The improvement in confinement is significant (but still inferiorto that of tokamaks). These single-helicity states appear to emerge when higherplasma currents are maintained. To reach these high-current regimes, magneticfeedback of MHD modes seems crucial [102].
The currently active lineup of RFPs worldwide consists of (i) RFX-mod inPadova, Italy (ii) MST in Madison, Wisconsin, USA (iii) EXTRAP T2R in Stock-holm, Sweden, and (iv) RELAX in Japan. A fifth member is coming shortly. Chinarecently announced plans for the KTX machine to be built in Hefei. It is dimen-sioned and designed similarly to RFX-mod and will be equipped for MHD feedback,too.
2.5 On automatic control in MCF
Control problems in MCF may be classified into (i) kinetic control and (ii) magneticcontrol. Further partitioning is geometrical (a) axisymmetric (b) nonaxisymmetricand the within-shot temporal distinction between (1) breakdown (2) ramp-up (3)flat-top and (4) ramp-down.
Automatic control15 has been applied in tokamak research for many years andthe generic problem of tokamak plasma axisymmetric positioning and shape controlcan be considered rather developed in many aspects. In the above classificationscheme this would be (ii),(a),(2)-(4). In tokamaks with significantly shaped cross-sections, feedback stabilisation is in fact mandatory. The vertical position (anaxisymmetric n = 0 displacement) is unstable. The standard solution is to have afast feedback loop for stabilisation of the plasma position (or its vertical velocity)and on top of this a slower system with the ability to shape the plasma boundary.The actuation for this consists of various poloidal field coils (which therefore arephysically toroidal). The basic measurements are provided by various magneticfield sensors. A recent design study for plasma position and shape control can befound in e.g. [103].
Recently a textbook was published specifically on the (ii),(a) topics [104] anda few years earlier a double-issue of the IEEE Control Systems Magazine was ded-icated to the status and requirements of control technology for tokamak plasmas[105, 106]. The plasma axisymmetric equilibrium control system is an example ofrather successfully applied model-based control, although calibration and identifi-cation techniques have been mobilised here as well [107]. It has become feasibleto do real-time equilibrium reconstruction by solving the inverse Grad-Shafranovproblem including more advanced diagnostics in addition to magnetics [108]. Inparticular, the current-density profile is of interest [109, 110]. An alternative recent
15A brief and broad overview of automatic control has been deferred to subsection 3.3 prior tothe introduction of the typical T2R control loop formulation used in the thesis.

16 CHAPTER 2. MAGNETIC CONFINEMENT FUSION
approach is a real-time parallel simulation of the tokamak profiles (dynamic stateobserver) [111].
Kinetic control (i) amounts to the orchestration of convection-reaction-diffusion,temperature, current-density profiles and so on. This goes far beyond the use ofmagnetic actuators alone but needs to be properly synchronised with the magneticprofiles. Plasma heating systems include neutral beam injection (NBI) and radio-frequency (RF) power antennas. Current can also be driven by RF systems and/orthe NBI. Some background and ambition for the real-time kinetic control (ulti-mately including actual fusion burn control) can be found in [112, 113, 114, 115]and the references therein. It is here possible to view the magnetic control (ii) as alayer below (i) in some governance hierarchy. It can be noted that stepping beyondthe baseline magnetic shape and vertical stabilisation problem appears to warrantsemi-empirical and even fully empirical modeling (scaling laws and such). Control-oriented kinetic (real-time) modeling is a difficult problem. A complete suite ofinteractive engineering and physics subsystems (subphenomena) that captures thecontrol-relevant input-output behaviour of the tokamak plasma has been the topicof integrated tokamak modeling (ITM) efforts.
Nonaxisymmetric magnetic control (ii),(b) for the flat-top (3) is much less de-veloped in practice for tokamaks than axisymmetric (a).16 For advanced tokamakscenarios (ATs) where the plasma-β value is high further MHD instabilities tend toemerge. For example, the (neo-)classical tearing mode (NTM) may flatten the tem-perature profiles by spawning a magnetic island around a rational surface. Someprogress has been made in the efficacy of using electron cyclotron current depositionand resonance heating (ECCD/ECRH) to suppress these modes as they emerge.Second, the resistive wall mode (RWM) stability limit will be crossed [19]. TheRWM is a disruptive MHD instability in the sense that it is a free boundary modethat tries to kink out of the confining field. In the previous subsection 2.4 it wasmentioned that RWM class instabilities can be stabilised by externally applied mag-netic feedback control for RFPs. Many theoretical [117, 118, 119, 120, 121, 122, 123]and initial empirical studies [124, 125, 126, 127] have been made on the topicof RWM control in tokamaks and spherical tokamaks. There seems to be someprospects in exploiting self-stabilisation by plasma rotation but a reactor balancingon marginal stability may not be very reliable. A recent development is the in-clusion of various tokamak plasma-kinetic effects in the stability calculations [128].MHD stability codes for RWMs [129] are now coupled to finite element descriptionsof three-dimensional passively conducting structures so that realistic eddy currentscan be modelled [130]. Full MHD stability with background stationary plasmaflow and rotation are common in modern codes [131, 132]. The story told fromthese studies is that magnetic feedback indeed seems to be possible for RWMs butit remains a challenge to make its realisation reactor-relevant (or reactor-friendly)
16The related problems with nonaxisymmetric error fields (EFs) are well-recognised [116]. Al-though a common approach to suppress EFs is to use “static” error correction coils and not“dynamic” (feedback) correction.

2.5. ON AUTOMATIC CONTROL IN MCF 17
and reliable. Should externally placed coils be used? Internally? How many coilsare really needed? How much surface coverage is required? The tokamak wall isalready crowded by microwave antennas and ports for various diagnostics etc. Athird MHD instability that shows up in high-confinement (H-mode) operation oftokamaks is the edge-localised mode (ELM). ELMs, too, appears to require internalmagnetic coils (at least for exploring how to control and/or mitigate them [133]).
A recent promising hybrid kinetic-MHD theory approach to fusion plasma sta-bilisation (mainly sawteeth and NTMs), based on RF power and neutral beam in-jection to tilt particle velocity distributions, can be found in [134]. Recent progresson the control (of the oscillatory period) of the nonaxisymmetric “sawtooth” mode(usually regarded as an m = 1, n = 1 internal kink) can be found in [135] andreferences therein.
From the control engineering perspective a robust RWM design such as the casesstudied in [136, 137] seems appealing. Even adaptive control has been considered[138, 139]. Model uncertainty is likely to be far larger for nonaxisymmetric MHDthan for the vertical column positioning. Thus some appropriate robustness conceptappears important. This is also strongly related to the classical question of “moderigidity”. As more tokamaks are equipped with extensive coil arrays these questionsmay be properly addressed in the coming decade. The DIII-D tokamak in SanDiego, USA, has been at the frontier of nonaxisymmetric tokamak plasma controlfor many years since internal and external coils were installed early. A recentstudy of RWM (nonaxisymmetric) experimental stability near the marginal pointin DIII-D is found in [140] where the concept of “MHD spectroscopy” is cited. MHDspectroscopy was originally introduced by Goedbloed et al. [141] for the study offast time-scale MHD wave physics mainly using RF antennas to excite e.g. Alfvéneigenmodes [142]. Excitation of RWMs is thus naturally viewed as low-frequencyMHD spectroscopy. At the time of writing ASDEX-U outside München, Germany isbeing retrofitted with internal coils to study RWMs, ELMs and NTMs. The sameholds for TCV in Lausanne, Switzerland [143], and the HBT-EP17 at ColumbiaUniversity, New York, USA.
The current and projected needs and requirements for control in present- andcoming-day tokamaks pose challenges in real-time computation and data-acquisition.There is an unsurprising trend towards tightly integrated plasma diagnostics sub-systems and real-time feedback loops [144]. Many tokamak-research groups are co-developing various software frameworks, microelectronics, and real-time networksfor the purpose of flexibly combining on-line information from various sources18.Flexibility is particularly important in this integration of diagnostics into controlsince the physics-developments continuously lead to new ideas to be tested, whichimplies reconfiguration of the control logic - the MCF proprioception, or “nervoussystem”.
17See e.g. http://www.apam.columbia.edu/HBT-EP/ .18The notion of “sensor” fusion, a popular term in e.g. signal processing, does not seem to
have gained similar traction in nuclear fusion research.


Chapter 3
Experimental modal analysis andcontrol
3.1 System identification
System identification is the science and technology for estimation of dynamical sys-tems from measured input and output data [145, 146, 147, 148]. It is usually thoughtof as a set of important tools used for practical applications of control theory. Oreven as the interface between model abstractions and real-world engineering [149].System identification may formally be regarded as an inverse problem [150] (forthe continuous-time case this translates to an integral equation where the unknownkernel is the impulse response), but this does not seem to be emphasised in manypresentations of the subject. Recently however it has become quite fashionable insystem identification to revisit general ideas from regularisation of inverse problemsolutions and techniques of supervised statistical learning [151, 152, 153, 154].
The basic problem in system identification is beneficially cast as a classicalsupervised learning problem: predict the output data using some function (linearor nonlinear) of the input data. Dynamical systems are supposed to be causal soprediction is forward in time1. A “model class” is a specific parameterisation of thepredictor function. The parameter vector that minimises the error of prediction(in some useful norm) for the given dataset defines the estimated system. Thisis plainly called the prediction error method (PEM) [146]. PEM is motivatedin the maximum likelihood sense (classical statistical theory) [145]. It turns outthat for a general linear time-invariant (LTI) system the predictor is a nonlinearfunction in the parameters. A certain basic, but fundamentally important, linearparameterisation is the auto-regressive exogenous (ARX) class, of which a specialcase is the finite impulse response (FIR) parameterisation. Both of these are usedin this thesis.
1If the causality is not respected in this sense one may be doing filtering or smoothing instead[155].
19

20 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
A more recent approach to system identification, which does not strictly fitinto the PEM framework is the so called subspace identification method (SIM).SIMs come in many flavours [156, 157, 158, 159, 160]. Their basic mechanism is re-lated to model reduction techniques and often involves singular value decomposition(SVD) of data matrices with the purpose of projecting most of the signal variationsinto a “synthetic” state-space sequence. Having a state sequence, the state-spacematrices are obtained by least-squares estimation. The attractiveness of SIMs istheir efficiency and noniterativeness. SIMs handle both univariate and multivari-ate signal data with ease using reliable numerical linear algebra programming. Adrawback may be that they produce state-space systems wich are essentially black-boxes. State coordinates are nontrivial to interpret in general. Another drawback isthat the (asymptotic) statistical properties of SIMs are not well understood. Somepractical-industrial aspects on the usage of SIMs is communicated in [161]. Someproperties of SIMs are exposed in e.g. [162, 163, 164] and [165, 166, 167] (the latterthree references utilise the concept of “eigenstructure identification” which is ofparticular interest below).
Note that ARXs, FIRs and SIMs may all be called “nonparametric” methods.This is because they are somtimes seen as generic containers and flexible represen-tations for any LTI system. Here, “nonparametric” is used in the sense that therespective model-class parameterisation is “dense” and usually invoked with mainlythe general justification that it has an ability to approximate general LTI systemsas the container order is increased at a rate typically lock-stepped to the size of thedataset.
Figure 3.1 is supposed to illustrate the nonparametric LTI class in relation toa “physics-based” MHD parametric class (derived in simplified geometry and withsimplifying assumptions) in the problem of estimating the multivariate externalplasma response which is a centrepiece in this thesis. The figure should be inter-preted as follows. M∗ represents the location of the “true” system in the spaceof possible dynamical systems. The (orange) circle centered around M∗ indicatesthe implied uncertainty given a finite record of data generated by M∗. This circlemay also represent the more inherent random variations of the true system itself.It may be the case that this circle shrinks as the interval of observation increases.Let M0 be the realised system. Two approximation classes are now represented bythe soft-cornered rectangular regions. The green region is linearised MHD, whichis a special case of the gray region, which is general LTI. The best fit to M0 inthe linearised MHD model class is denoted M1. The best fit to M0 in the genericLTI model class is denoted M2. One should think of the MHD class as assumingcertain idealisations and a simplified geometry, such that a tractable parameteri-sation suitable for system identification could be achieved at all. The main pointis that M2 should end up closer to the true system realisation M0 than would M1,since linearised MHD is just a subset of generic LTI. The generic LTI class may beable to capture dynamics which would be awkward to try to parameterise in termsof linearised MHD. And in addition there exist efficient identification methods fornonparametric multivariate LTI as will be seen below.

3.1. SYSTEM IDENTIFICATION 21
Linearised MHD
Generic LTI
Truth
M1
M2
M*
M0
Figure 3.1: Illustration of basic estimation concepts relevant for the linearised MHDsystem identification in this thesis. Generic LTI contains linearised MHD and thusallows closer approximation to the true system realisation M0. Some bias andvariance trade-off interplay is suggested, too.
Another basic estimation issue somewhat illustrated by figure 3.1 is the potentialof minimising variance of system estimates by restricting the degrees-of-freedomsof the model class. There is always some trade-off between model bias and modelvariance when doing system identification. As model complexity is expanded (e.g.leaving linearised simplified MHD for generic LTI) more data is needed to recoverthe estimation accuracy. Think of the circle being projected onto (i) the smallerlinearised MHD class and (ii) the larger general LTI class. The image is less spread(smaller variance) in case (i) than for case (ii). However the model bias is de-creased since the more complex model class can approach the true system moreclosely. Standard methods to systematically deal with the bias-variance trade-offselection include: cross-validation (CV), regularisation for smoothness, and vari-ous “information-based” criteria [154, 168]. In classical system identification this iscalled “order-selection”, the name stemming from the usage of the (integer) state-space dimensionality as a main regularisation parameter. It may also be possibleto utilise some type of general structural specification (other than explicit param-eterisation) of the model to regularise its estimation.

22 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
3.1.1 Standard multivariate LTI system representations
Since signal processing, and in particular system identification, ultimately have todeal with sampled data, the native linear time-invariant dynamical system repre-sentation is the discrete-time LTI (DTLTI) form
x(k + 1) = Ax(k) + Bu(k) + w(k) (3.1a)
y(k) = Cx(k) + Du(k) + v(k) (3.1b)
where x ∈ Rn×1 is the state vector, u ∈ R
nu×1 the input vector, y ∈ Rny×1 the
output vector, and integer k the running time-series sample index. The form (3.1) issometimes called “deterministic-stochastic” due to the existence of both the knowninput u and the noise sequences v and w2. If w is zero then model (3.1) is on the“output-error” form, which apparently is a simplified special case. It is assumedthat v and w have zero mean value and the joint covariances EwwT = Rww,EwvT = Rwv and EvvT = Rvv. From the theory of optimal filtering [155, 170, 171]it is now possible to calculate a “steady-state” observer for (3.1) by solving theRiccati equation in P
P = AP AT + Rww − (AP CT + Rwv)(CP CT + Rvv)−1(AP CT + Rwv)T (3.2)
and settingK = (AP CT + Rwv)(CP CT + Rvv)−1 (3.3)
The matrix K (3.3) is usually referred to as the Kalman gain3. The observerequation is the first line in the predictor form of the DTLTI system written asfollows.
x(k + 1) = Ax(k) + Bu(k) + K (y(k) − y(k)) (3.4a)
y(k) = Cx(k) + Du(k) (3.4b)
System (3.4) attempts to propagate the difference between the measured outputand the (one-step-ahead) predicted output into an update of the state estimate.This is exactly the point of the Kalman gain matrix.
The “innovations-form” of a DTLTI system is obtained by denoting the “in-novation” e(k) = y(k) − y(k) and removing the hat-notation as written below.
x(k + 1) = Ax(k) + Bu(k) + Ke(k) (3.5a)
y(k) = Cx(k) + Du(k) + e(k) (3.5b)2Note that this type of dynamical evolution equation may be regarded as a discretised
“Langevin equation” in some of the physical sciences [169]. For example, it may sometimesbe possible to explicitly link the variance of w with an equilibrium temperature and the modesof A using the fluctuation-dissipation theorem, whenever some equipartitioning theorem properlyapplies. However it is not the topic here to elaborate on these finer details. Typically (3.1) issimply postulated in engineering texts, no questions asked. Regard it as a generic template forlinearised dynamics.
3Rudolf E. Kalman [172].

3.1. SYSTEM IDENTIFICATION 23
It is conventional to base formulations of SIMs on the DTLTI system form (3.5),but it is arguably even more useful to directly utilise format (3.4) instead. In theSIM-remix developed in subsubsection 3.1.2 the predictor equation was used asthe starting point. As is mentioned in [157] the predictor form is stable even forunstable systems and may thus perform better when unstable systems are beingidentified in some application. With some emphasis it can be stated that this isrelevant for this thesis (T2R has multiple marginal and unstable modes).
3.1.2 A predictor-form SIM
It is the purpose of this subsubsection to briefly motivate the SIM used in thisthesis. Starting from (3.4) and the SSARX method introduced in [173] (which isin innovations-form) the predictor-cast SSARX version will be outlined4.
From (3.5) it follows
x(k + 1) = AKx(k) + BKz(k) (3.6a)
y(k) = Cx(k) + Du(k) + e(k) (3.6b)
by defining
z =(
uy
)(3.7a)
AK = A − KC (3.7b)
BK =(
B − KD K)
(3.7c)
Now, the DTLTI system (3.6) takes available measured data {z(k)} as input, out-puts {y(k)}, and AK is generally assumed to be stable (which means that ‖An
K‖approaches zero as n increases). The relations (3.7) dictate (re-)mapping to andfrom the innovations form.
Two similar but related approaches open up from here. The vector ARX(VARX) predictor, to be defined now, plays a fundamental role in either case.For simplicity and brevity D = 0 in what follows. The VARX predictor5 is a linearrelation of the form
y(k) =p∑
j=1
H(j)z(k − j) = Hpzp(k) (3.8)
where H(j) ∈ Rny×(nu+ny) are matrix coefficients and the shorthand rhs expressionis based on the notations
Hp =(
H(1) H(2) . . . H(p))
(3.9a)
zTp (k) =
(zT (k − 1) zT (k − 2) . . . zT (k − p)
)(3.9b)
4Here the basic single-batch formulation is formed. The multibatch extension, which is re-quired in the present application for RFPs, is found among the papers below.
5Apparently the VARX predictor is actually a FIR system in the dataset {z(k)}.

24 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
Minimisation of the prediction error for a given lag order p amounts to solving
minHp
EǫT (k)W ǫ(k) (3.10)
where ǫ(k) = y(k)−y(k) = y(k)−Hpzp(k) from (3.8). It turns out that the solutiondoes not depend on W (it is assumed that W is any positive definite matrix [146])and fulfills the linear matrix equation
Ey(k)zTp (k) = HpEzp(k)zT
p (k) (3.11)
which is, in practice, approximated by evaluation of the covariance matrices E (·)from the finite available dataset. Equation (3.11) is efficiently solved for Hp row byrow. Denote the solution Hp.
Now Hp can be related to the (truncated) impulse response of the system (3.6).Suppose the initial state at k = 0 is zero. Suppose further that the “ith impulse”kick-starts the system. This means that z(0) = p(i) where p(i) has all its nu + ny
components equal to zero except the ith which is unity, and that z(k) = 0 for allk ≥ 1 (at this point, z is considered as being independent of y and u). With nooutput error, simple iteration shows that the ith vector impulse response is
y(i)(k) ={
CAk−1K b
(i)K k ≥ 1
0 k ≤ 0(3.12)
where b(i)K is the ith column in matrix BK . By appending the vector responses
i = 1 . . . nu + ny the matrix impulse response is summarised by
H(k) = CAk−1K BK =
(CAk−1
K B CAk−1K K
)(3.13)
for k ≥ 1, zero otherwise. And these matrices (3.13)6 are the same ones found inthe convolution summation (3.8). The block structure in (3.13) here suggests twoclasses of responses: (i) a deterministic part driven by u via B and (ii) a stochasticpart driven by e via K. From (3.8) it is seen that the second part is modeled byan input-free vector autoregressive model (VAR).
From here there are several pathways to follow. The relation between the es-timated predictor coefficents and the state-space matrices can be solved directlyusing the eigensystem realisation algorithm (ERA) or similar [174]. Another optionis to utilise the predictor to “pre-clean” the input-output data, and then attempt toconstruct an order-efficient state-sequence using “canonical variate analysis” (CVA)[175] (also known as canonical correlations c.f. [176, Ch. 11]). In this latter ap-proach (SSARX) [173] the final state-space matrices are found by least-squaresestimation using the synthetic state-sequence. Both ERA and SSARX have beentried out in the thesis. Both methods employ large-scale SVDs and are in many
6Sometimes known as Markov parameters.

3.1. SYSTEM IDENTIFICATION 25
aspects similar to model reduction procedures [177]. Related, but theoretically in-clined, work regarding VARX and subspace modeling can be found in [178, 179].Below the essentials of SSARX are provided.
The predictor-cast SSARX specifically puts up a SIM data relation of augmenteddata vectors as follows. First introduce the “future horizon” data vectors
zf−1(k) =
z(k)z(k + 1)
...z(k + f − 2)
(3.14)
and
yf (k) =
y(k)y(k + 1)
...y(k + f − 1)
(3.15)
with uf (k) and ef (k) stacked as (3.15). Then, assuming that initial conditionshave decayed, it holds (D = 0 assumed still)
yf (k) = Hfpzp(k) + Gf zf−1(k) + ef(k) (3.16)
for some structured matrices Hfp, and Gf . The crucial part in SSARX is to popu-late Gf with the estimated VARX blocks H(j) at their proper places. In this waycausality is explicitly respected for the correlation analysis later on, so both open-and closed-loop data can be handled. Let
yf (k) = yf (k) − Gf zf−1(k) = Hfpzp(k) + ef (k) (3.17)
so it is seen that the future data yf (k) is modeled as set of linear functions ofthe past data zp(k). Now the CVA analysis of the relation (3.17) tries to find acommon space for these vectors where they are maximally correlated. This is the“subspace” part of the method7.
Canonical correlations for two random vectors x and y are obtained by max-imisation of the correlation coefficient [176]
ρ =EaT xbT y√
EaT xxT aEbT yyT b=
aT Rxyb√aT Rxxa
√bT Ryyb
(3.18)
with respect to a and b subject to aT Rxxa = bT Ryyb = 1 where ExxT = Rxx,EyyT = Ryy and ExyT = Rxy. A key property of the canonical correlations is thatthey are invariant under affine transformations.
7There are alternative ways to find the “subspace”. CVA is one special type of “SVD-weight”used in the literature of SIMs.

26 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
Application of CVA to (3.17) leads to a set of new coordinates
x(k) = Lzp(k) (3.19)
purportedly representing the main correlations of yf (k) and zp(k) in order of de-creasing importance. Some truncation strategy should be applied to set the systemorder. Once the synthetic state sequence (3.19) is computed, it is straightforwardto solve for the state-space matrices in (3.6) by least-squares estimation. Thisconcludes the outline of the SIM used here. So it goes.
3.1.3 Something on input design
Nothing will be withheld fromthem that walk randomly.
Luke Rhinehart (1932-)
It seems clear that since the system dynamics is to be recovered from the inputand its response to the input (ie. the output), the input properties may have someimpact on the accuracy of the system estimate. It is the purpose of this subsubsec-tion to provide a simple example that shows that this indeed can be the case. An“input-design” framework from PEM theory is employed to achieve this [180]. Theframework is based on asymptotic expressions for the variance of PEM estimates[147, 145] and references [181, 182, 183] provide a good idea of its development.The example below is directly related to the design of the “vector dither” (see alsosubsubsection 3.1.4) which has played a central role in the experimental campaignsin this thesis. The example has three parts: (i) a parameterisation in DTLTI formof the basic first-order model described in the supplementary section A.1, (ii) for-mulation of an open-loop input-design optimisation program using PEM theory,and (iii) simulation of the effect of the input design when using a SIM method. Itseems reasonable that the designed input should be effective even when non-PEMtechniques are employed.
The zero-order-hold (ZOH) time-discretisation [184] of the continuous timesingle-input single-output system x = ax + bu, y = cx + du is x(k + 1) = adx(k) +
bdu(k), y(k) = cdx(k) + ddu(k) with ad = exp(aT ), bd =(∫ T
0 exp(at)dt)
b, cd = c,
and dd = d. If a 6= 0 then bd = (b/a)(ad − 1), if a = 0 then bd = T b. T is thetime-discretisation (sample) interval. Now consider the system
τmx − γmx = amu (3.20)
which has three “modal” parameters {τm, γm, am}. System (3.20) can be recog-nised as the prototype monomodal RWM model as described in the supplementarysection below. System (3.20) has the DTLTI form
x(k + 1) = exp(
γm
τs
τm
)x(k) +
am
γm
[exp
(γm
τs
τm
)− 1]
u(k) (3.21)

3.1. SYSTEM IDENTIFICATION 27
using an interval time T = τs, if γm 6= 0. If γm = 0 then x(k + 1) = x(k) +(τsam/τm)u(k) which is just the limit γm → 0 of (3.21). Using the delay operatorq: q−1x(k) = x(k − 1) the transfer function of (3.21) reads
G(q) =bdq−1
1 − adq−1=
am
γm
[exp
(γm
τs
τm
)− 1]
q−1
1 − exp(
γmτs
τm
)q−1
(3.22)
in the usual sense y(k) = G(q)u(k) if it is the case that x in (3.20) is equal tothe output y. The sensitivity transfer functions are obtained by differentiation:∂∂s
G(q), for s = am, γm, τm. Fixing γm = −1 yields the special (vacuum diffusion)case
G−1(q) = am
[1 − exp (−τs/τm)] q−1
1 − exp (−τs/τm) q−1(3.23)
which is stable with the step response steady state gain y(∞) = am. It follows that
∂G−1(q)∂am
= q−1 1 − ρ
1 − ρq−1(3.24a)
∂G−1(q)∂τm
=amτsρq−1
τ2m
q−1 − 1(1 − ρq−1)2
(3.24b)
with ρ = exp (−τs/τm).The task is now to design an M -tap FIR filter W (q) such that w = W (q)v,
where v is white noise with unit variance (and Gaussian distribution), generatesan input w which has good properties for the estimation of the system above8.Let θ denote the parameter vector (am, τm). Let u = F (q)w and y = G(q)u + e.F (q) comes from the actuation dynamics. Then the input spectrum for w can bedesigned for optimal direct estimation of G(q) (using y and u alone) by solving(minimisation of trace (WP ), where W = V V T )
minZ,Q,{ri}M−1
i=0
trace (Z)
s.t.
12π
∫ π
−π
|F (eιω)|2Φw(ω)dω =M−1∑
k=0
lkrk ≤ β
(Z V
V T P −1
)≥ 0
(Q − AT QA −AT QB
−BT QA −BT QB
)+(
0 CT
C D + DT
)≥ 0
(3.25)
with
P −1 =1
2πλ0
∫ π
−π
∂G
∂θ
∂G
∂θ
∗
|F (eιω)|2Φw(ω)dω (3.26)
8White sequences are here, as usual, produced by pseudorandom number generators [185, 186].

28 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
and
Φw(ω) =M−1∑
k=−(M−1)
r|k|e−jωk = r0 + 2
M−1∑
k=0
rk cos(ωk) (3.27)
and
A =(
01×(M−2) 0IM−2 0(M−2)×1
)B =
(1
0(M−2)×1
)
C =(r1 r2 . . . rM−1
)D =
12
r0
(3.28)
this (indirectly) shapes the spectrum Φu such that an open-loop optimal input isΦu = |F |2Φw, and Φw is what can be applied. Here the noise model is H = 1and Ee2(k) = λ0. Note that P −1 =
∑M−1k=0 rkPk, where Pk are matrix coefficients.
Having obtained {rj}M−1j=0 one can convert these autocorrelations into an M -tap
FIR filter using some factorisation technique [187]. The size of the input signal uis determined by β > 0 (in fact β is here equal to the mean square of the resultinginput u = F (q)W (q)v when v is white with unit variance). The input spectrumoptimisation (3.25) is a convex program, which is its foremost salespoint.9 Thecomplexity of the numerical problem rises rapidly with the system size.
A short explanation of (3.25) goes as follows. The first row is a simple linearinequality that limits the allowed input signal power. The second row involves alinear matrix inequality (LMI). Some background on LMIs can be found in refer-ences [189] and [190, Ch. 12]. An LMI is of the form M(x) ≡ M0 +
∑nj=1 xjMj < 0,
where all matrices {Mj}n
j=0 are real and symmetric, and x ∈ Rn×1 is the “decision
variable” with real scalar components {xj}n
j=1. The notation M(x) < 0 meansnegative definite. The second row can be written in this LMI form with the aux-iliary variable Z = ZT . The point is that it then becomes a representation of theweighted-trace objective (using a Schur complement). The last row is another LMIthat ensures that the designed spectrum Φw(ω) is non-negative (here Q = QT isyet another auxiliary variable).10
The effect of input design is illustrated by the example estimation reported infigure 3.2. The input is designed for a nominal G−1(q) for the vacuum system andcurrent controller corresponding to RFX-mod RFP [191]. An M = 16 ditheringis designed in the sense (3.25) with identity weight and is applied as input to thecurrent controller. The vacuum system parameters are estimated NMC times eachwith N samples observed subject to some output noise. The mean square of the
9The programming of (3.25) and similars in this thesis has been done using the linear matrixinequality (LMI) toolbox included as a part of MATLAB [188]. Other softwares exist too, but theimplementation details can be cumberswome either way. Recently the Automatic Control groupat KTH have been promoting their own aid for experiment design in system identification. Theinterested may look up the MOOSE package (see http://www.ee.kth.se/moose).
10This is a consequence of the Kalman-Yakubovich-Popov lemma, see e.g. [180] and referencestherein.

3.1. SYSTEM IDENTIFICATION 29
current output is limited by a β = 3 × 104, root mean square (RMS)√
β ≈ 170 A.The accuracy of the estimates is compared to the same numerical experiment run,but using white noise input with the same RMS. It can be seen that the designedinput indeed yields (here slightly) better estimation from the same amount of data(but requires some prior knowledge apparently).
0.9993 0.9994 0.9995 0.9996 0.9997 0.9998 0.9999 1 1.0001 1.0002 1.00030.97
0.98
0.99
1
1.01
1.02
1.03
1.04
1.05
1.06
1.07
a/a0
bc/(b
0c 0
)
whiteΦw
true
Figure 3.2: NMC = 1×102 Monte-Carlo runs each with N = 1×103 record length.It is seen that input design may improve estimation accuracy by redistributing theallowed input power to excite where it supposedly is needed. For this example theestimation variance reduction is not fantastic but still noticeable. The example issimilar to the open-loop input design used for the vacuum-diffusion dither designin one of the papers.
There is a subtlety in the example developed above. Figure 3.2 shows thevariance of the estimates of the state-space scalar parameters a and b of a SISOsystem (with c = 1). However the input was designed for the identification oftwo other parameters am and τm. These are related nonlinearly by a = ρ andb = am(1 − ρ) with ρ = exp (−τs/τm). The idea is that if am and τm are betterpinned down by using the input design programming (3.25) then also parameters aand b will be more accurately determined.11 This slight disconnect between inputdesign and final usage is present in this thesis as will be more clear when EMA isintroduced in subsection 3.2 below.
11This may be addressed somehow by carefully choosing the weight W in LMI program (3.25).The choice of W should ideally be made based on some application-oriented performance metric.

30 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
It was pointed out at the beginning of this subsubsection that the PEM frame-work leading to (3.25) may not rigorously apply to the situation where a SIM isemployed. But it seems quite reasonable that an input which is designed to generateinformative datasets with respect to certain parameters will allow good estimationof these very parameters irregardless of the details of the estimation algorithm. Ora better rephrasement might be that the information content in data from the de-signed experiment is generally improved. So any estimation method is in a positionto perform better simply due to the data being more on-topic.
As always in these types of experiment designs there is the awkward problem of(lack of) initial knowledge. Unless the process is not already approximately knownit seems difficult to come up with an optimal input. It appears that mistakes canbe made so that process-optimised inputs may even be worse than some genericdither input. A “robustness” concept seems as warranted in experiment design asin multivariable control [192].
3.1.4 Closed-loop dither injection
Anyone who considersarithmetical methods ofproducing random digits is, ofcourse, in a state of sin.
John von Neumann (1903-1957)
The RFP system, being subject to DTLTI modal analysis in this thesis, is man-ifestly unstable. As seen in the later sections there are tens of unstable modes.To be able to acquire statistics in a neighbourhood of a steady-state (a working-point) of the RFP, stabilisation appears mandatory. Feedback stabilisation addssome complication to the identification procedure. In fact some classical systemestimation methods, such as the empirical transfer function estimate which uses di-vision of Fourier transforms, would typically give meaningless results when appliedto datasets acquired from systems operating under feedback control. The reasonfor this is the additional correlation between input and output (output noise) intro-duced by the presence of the feedback loop. It is however not difficult to estimatethe open-loop plant from closed-loop data if the causality is strictly enforced in atime-domain method. For example, the SIM outlined in subsubsection 3.1.2 doesnot get confused by closed-loop datasets. This is not true for all SIMs [157].
“Closed-loop system identification” most often means that the open-loop systemis to be identified using data measured from closed-loop (feedbacked) operation.There are three basic approaches to do this: (i) direct method (ii) indirect methodand (iii) joint method [193]. Methods (ii) and (iii) also involve modeling and/orestimation of the control system associated with the dataset. If this control systemis nonlinear then (ii) and (iii) could become very difficult paths. If the controlsystem is linear then (ii) and (iii) could be solved by e.g. a standard (open-loop) SIM

3.2. MODAL ANALYSIS 31
(for example in a “two-step” fashion) but it has been argued that the theoreticallymost efficient method is (i). The direct method (i) is the simplest approach12.Method (i) for a plant G(q) involves only the input-output dataset {u(k), y(k)}Nk
k=1
for G(q). A basic limitation is that u(k) should be error-free13 (i.e. u must beexactly known which is typically the case if u is generated by a controller to whichthere is internal access). Subsubsection 3.1.2 describes a SIM that can be used inapproach (i).
There are several reasons to achieve closed-loop system identification even ifthe plant would be stable. For example, in a process industry, there may be safetyconcerns and important actuation-level or operating-point constraints that mustbe monitored and enforced by feedback. Then development and deployment of amodel-predictive controller (MPC) would require that the process model refinementbe done with as little perturbation to the plant as possible. This is sometimesbranded as plant-friendliness.
Input- and experiment-design, too, are somewhat complicated by the presenceof feedback. A key difference between open-loop input design and closed-loop inputdesign is that in the latter case it is only possible to access the plant input indirectly.The optimal open-loop input spectrum for identification of some plant parametersmay not be feasible to realise since some predistorted version has to be “injected”into the loop. By injection it is here meant that an external excitation (also knownas dither) is superimposed onto the loop at some stage in the feedback loop. Thedither may enter at a tracking reference input or at some other specifically dedicatedpoint. Any such scheme can be dubbed “closed-loop dither injection”.
3.2 Modal analysis
The ambition of modal analysis is normally to determine the so called modal pa-rameters associated with mechanical vibrational resonances [194]. More generallyit suggests methods to find physical poles, as opposed to mathematical (or spuri-ous) poles. Poles that appear to exist robustly may be worthy of interpretationin terms of a modal description based on some physics-based theory. By contrast,mathematical poles may have nothing to do with physical modes. In mechanicalengineering there exist two classes of modal analysis approaches: (i) experimentalmodal analysis (EMA) and (ii) operational modal analysis (OMA). In the former,inputs can be used to deliberately excite modes of interest whereas in the latter thisis not feasible or avoided for some reason. Consider, for example, structural healthmonitoring of a suspension bridge. It may be possible to shut down the bridge andthen park some powerful shaker at a clever position to actively excite the modesthat could tell if the bridge is intact or not. That would be EMA. If this is tooinvasive maybe one has to be content with the background unmeasured (unknown)excitation provided by traffic and wind alone. This form of passive monitoring
12In addition, (i) can be used even if the control system is nonlinear.13Which can become a problem in some cascade system configurations.

32 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
is the subject of OMA. Some techniques for extraction of modal parameters fromtime-series data can be found in [195, 196, 197, 198, 199]14.
The point with this subsection is to illustrate the use of SIMs to extract thespectrum of a toy diffusion partial differential equation, by sampling it in bothspace (arrayed measurement channels) and time (time-series). An EMA applicationis given for the example. The intention is to build some (post hoc) confidence inthe theoretical ability of the SIM to obtain (partial) diffusive spectra which isessentially what was done in some of the papers below. It should also aid thereader in understanding and interpreting the same papers.
3.2.1 A one-dimensional diffusion toy example
Consider the inhomogenous one-dimensional partial differential equation with mixedNeumann-Robin boundary conditions on a bounded interval
∂tb − λ∂2xxb = f(x, t), on x = 0 . . . h (3.29a)
∂xb = 0, at x = 0 (3.29b)
∂xb + αb = 0, at x = h (3.29c)
where λ > 0 is the diffusivity. The boundary conditions are symmetric and thespectrum turns out to be nondegenerate and stable. It is assumed that α > 0 whichmeans that the right-hand-side boundary (at x = h) is dissipating energy. The left-hand-side boundary (x = 0) is neutral in this sense.15 The solution to (3.29) can beobtained by finding an orthogonal set of eigenfunctions to the homogenous equation∂tb−λ∂2
xxb = 0 [202]. Specifically, via separation of variables, let b(t, x) = T (t)X(x).Then the homogenous equation implies that X ′′/X must be a constant. Applyingthe boundary conditions leads to the eigenvalue equation
tan (kh) = α/k (3.30)
which has an infinite set of solutions {kn}∞n=1
16. The corresponding eigenfunctionsare
Xn(x) = cos(knx) (3.31)
and they do fulfill∫ h
0XnXmdx = rnδnm, where δmn is the Kronecker symbol (zero
if n 6= m, one if n = m). By projecting the equation onto the basis of eigenfunctions
14There seems to exist a close analogy between the subspace-method-based EMA approachesand algorithms for time-domain-based eigenvalue/eigenvector computation [200, 201], in partic-ular the “filter-diagonalisation method” (FDM). This connection does not appear to have beendeveloped clearly in the literature. The “filtering” in FDM is in fact some kind of input design.
15As α approaches zero (from the positive side) then the spectrum will approach the prototyp-ical Neumann case where the first eigenvalue is zero exactly.
16Nondimensionalisation of equation (3.29) shows that the solution depends on the product αhand that the diffusive time-scale is τ0 = h2/λ.

3.2. MODAL ANALYSIS 33
the solution to (3.29) can be summarised as
b(t, x) =∞∑
n=1
Tn(t)Xn(x) (3.32a)
Xn(x) = cos (knx) (3.32b)
Tn + λk2nTn = (1/rn)
∫ h
0
f(t, x)Xn(x)dx (3.32c)
It is seen that the poles of the time-evolution equation are located at{
−λk2n < 0
}.
This is the “modal damping rate”. The “modal frequency” is here zero for allmodes (kn ∈ R). The “modal shape” is given by the spatial function (3.31). Thisexemplifies some basic terminology of modal analysis (for linear modeling).
A finite array of measuring probes are now introduced to sample the infinite-dimensional state space {Tn}∞
n=1 of (3.32). Suppose there are ny probes with theaperture functions {gi(x)}ny
i=1 in the sense that the ith output yi is given by
yi(t) =∫ h
0
b(t, x)gi(x)dx =∑
n
cinTn (3.33)
with matrix elements cij =∫ h
0Xjgidx. Introduce also a finite set of input channels
{us}nu
s=1 by assuming an exciting field of the form
f(t, x) =nu∑
s=1
fs(x)us(t) (3.34)
which by (3.32) yields the input terms
(1/rn)∫ h
0
f(t, x)Xn(x)dx =∑
s
bnsus (3.35)
where bns = (1/rn)∫ h
0 fs(x)Xn(x)dx.Now collect the state in the vector x, so that xn = Tn, n = 1 . . . ∞. Introduce
the diagonal matrix A with elements ann = −λk2n. Let matrices C and B be defined
by the elements cin, bns above. Stack the outputs yi in vector y ∈ Rny×1 and theinputs us in vector u ∈ Rnu×1. Then the model can be cast in the LTI form
x = Ax + Bu (3.36a)
y = Cx (3.36b)
The slowest (dominant) mode evolves on the time-scale
τ1 =1
λk21
(3.37)
which can be used to determine a reasonable sampling rate. For the exampleof modal analysis in the next subsubsection, pointwise probes and excitations areintroduced: fs(x) = δ(x−xs) and gi(x) = δ(x−xi) for s = 1 . . . nu and i = 1 . . . ny.

34 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
3.2.2 EMA illustrated for the toy example
Here the diffusion system from the previous subsubsection 3.2.1 will be the subjectfor a simple experimental modal analysis. First some considerations relevant forsystem identification in general, and modal analysis in particular. Intuitively oneneeds to observe a mode during an interval spanning at least a few of its charac-teristic times to accurately pin it down. In addition it must be sufficiently excitedto reveal itself. Finally it must not be undersampled.
In this case let the input be a known injected random multivariate signal withunit variance and estimate the system dynamics from input and output data. It isassumed that the output is obtained with noisy measurements. The signal to noiseratio (SNR) is set to equal 10 (here meaning that the output signal power is tentimes the output noise power).
The EMA results using the SIM outlined in subsubsection 3.1.2 above are illus-trated in figure 3.3. The instance of the diffusion model used 3 pointwise inputslocated at x1 = 1/4, x2 = 1/2, x3 = 3/4 (using h = 1 without loss of gen-erality). An equal-intervals array of 20 outputs was constructed using pointwiseprobes. The system was observed subject to (nondesigned) excitation of a unit-variance Gaussian white-noise vector input uT = (u1 u2 u3), ie. each ui(k) beingan independent identically distributed (normal distribution) random variable. Zero-order-hold discretisation was used. The sampling interval was set to τ1/200 andthe experimentation length was T = 10τ1 (thus the example does not depend onλ). Hence 2 × 103 time-series vector samples y(k) ∈ R20×1 were recorded (withSNR= 10 noisy measurements). The spectral properties of the system were definedby setting αh = 8.
The horizon order parameters used for the SIM here was f = 10, p = q = 20,and the subspace state order was truncated to n = 50 (the “true” system wassimulated using a truncation at order 100). No cross-validation or other orderselection technique was applied. For this example, a plot of estimated frequencyresponses reveals that it is almost a perfect match to the “true” frequency response.But apparently this need not imply useful modal characteristics as suggested infigure 3.3.
With 15 Monte-Carlo simulations of the procedure, it is seen in subfigure 3.3(a)that most poles are not really related to the “physical” spectrum of the underlyingsystem. Zooming in near the marginal stability on the real axis, subfigure 3.3(b),it turns out that the first pole (here the spectral radius) is accurately estimated.This is also the case for the second pole. But the third eigenvalue shows quite highestimation variance. The fourth mode (and fifth and so on) seems useless. Thisexample alludes to the importance of having some modal assurance criterion orstatistical quality check to aid the interpretation of EMA spectra.

3.2. MODAL ANALYSIS 35
−1 −0.5 0 0.5 1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
Re λ
Imλ
GG
(a) Toy diffusion discrete-time system spectrum.
0.75 0.8 0.85 0.9 0.95 1 1.05−0.1
−0.08
−0.06
−0.04
−0.02
0
0.02
0.04
0.06
0.08
0.1
Re λ
Imλ
GG
(b) Zoomed in version of subfigure 3.3(a)
Figure 3.3: Toy diffusion EMA example. The most dominant (slowest) diffusivemodes appear to be detectable using a generic SIM. The spread of the pole locationsis obtained by Monte-Carlo realisations. λ denotes the eigenvalues of the DTLTIsystem matrices. The true system is G and the estimated is G.

36 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
3.2.3 The bootstrap and the MBOSS method
The previous example suggested the need for some means for evaluating the sta-tistical reliability of the modal parameters. This is where the bootstrap comes in[203, 204]17. In this subsubsection the bootstrap from “modern” computationalstatistics is introduced and applied in the situation where several experiments (i.e.dither-injected T2R shots) are used to obtain a single DTLTI model using the SIMabove. Merging of multiple experiments is called “multibatch”. The bootstrap ishere exploited in the sense that each batch (here a T2R plasma discharge) corre-sponds to an independent and identically distributed random sample. This combi-nation of multibatch bootstrap resampling and the predictor-cast SSARX SIM iscalled MBOSS. Below MBOSS is briefly detailed after a quick introduction of thebasic nonparametric bootstrap. A different application of parametric bootstrap ina SIM setting can be found in the literature [205].
Consider the estimation of some scalar quantity θ from a set of scalar obser-vations Xn = {xi}n
i=1. Let the estimate be some function of the observationsθ = g(x1, . . . , xn) = g(x). What is the accuracy of this estimate θ? It seems thatin order to answer this one must invent some assumption on the distribution of thexj ’s. Classically, then, the solution is to evaluate a considerably awkward multi-
variate integral like σ2 =∫ [
θ(z) − Eθ]2
fX(z)dz where Eθ =∫
g(z)fX(z)dz and
fX(x) = fX(x1, . . . , xn) is the (really unknown) joint probability density “underly-ing” the set of observations Xn. In many cases it may make sense to regard the xj ’sas independent and identically distributed (iid) so that fX(z) =
∏nj=1 f(zj) with
1 =∫
f(z)dz. But Eθ =∫
g(z1, . . . , zn)∏
j f(zj)dzj is still difficult for a generalg. One would likely have to settle for a Monte-Carlo evaluation. Either of threedifferent attitudes to prior-information may now be endorsed
1. f(zj) imposed without regard of the dataset Xn.
2. f(zj) parametrically fitted to the dataset Xn.
3. f(zj) set to equal the empirical probability density associated with the datasetXn.
of which the last (third) will lead to the nonparametric bootstrap. The empiricalprobability density for Xn subject to iid can be written f(zj) = (1/n)
∑ni=1 δ(zj −
xi). This density hypothesis means that each logged outcome xi is equally likelyto occur at any position i = 1 . . . n. It follows that one can generate any number
of “synthetic” outcomes X (b)n =
{x
(b)i
}n
i=1by assigning to x
(b)i any of the xi’s with
equal probability. This sampling with replacement then gives perturbed estimates
17The word “bootstrap” seems popular in various unrelated disciplines. Bootstrap in thissubsubsection is restricted to the “Efron” sense [154] and has everything to do with computationalstatistics and nothing to do with noninductive current-drive which is its default connotation inMCF research.

3.3. AUTOMATIC CONTROL 37
θ(b) = g(x(b)1 , . . . , x
(b)n ), each equally probable. The implication of this is that
the collection{
θ(b)}B
b=1, i.e. B synthetic bootstrap samples of θ, in fact (through
histogramming) approximates the probability density of θ given Xn. Note that g(x)could be any complicated (or not so) expression. If n is large enough bootstrappingappears to be very accurate for large B.
As mentioned in the beginning of this subsubsection the MBOSS method nowapplies this idea by letting the samples xi be entire T2R plasma discharges. Thesexi’s can be seen as some kind of super-samples Si = {u(k), y(k)}k encompassingall vector input output recordings from the respective shots i. The dataset is thusXE = {Si}E
i=1 where E is the number of applicable T2R experiments. A datasetmay be regarded as iid with respect to the experiment index if for all indices (i)the same RFP equilibrium is utilised and (ii) the injected dither has stationarystochastic properties. It is also desireable that all shots Si in the super-set XE
should have approximately equal flat-top duration.In MBOSS18 the quantity of interest θ is a function (functional) of the multi-
batch SIM system estimate θ = g(G), G = FSIM (XE) where FSIM (·) abstracts themultibatch predictor-cast SSARX method alluded in subsubsection 3.1.2. In paperV below, g(·) essentially is the spatio-temporal eigenvalue spectrum of G.
3.3 Automatic control
Technology, too, wants to beubiquitous.
Kevin Kelly (1952-)
The purpose of this subsection is to relate parts of the thesis to the relevantbasic ideas of automatic control. An ambitious report on the general impact ofcontrol technology is [206]. Fundamental and advanced introductions are found ine.g. [184, 207, 208, 209, 190, 210]. The basic engineering-reasons for doing controlare nearly always worth repeating: (i) stabilise a system (ii) mitigate disturbances(iii) handle system uncertainties. For readers unfamiliar with control an exampleformulation of control design using the T2R closed-loop transfer functions is givenin subsubsection 3.3.2. An annotated schematic of the T2R closed loop is alsoprovided. First follows a short, incomplete and idiosyncratic exposition of what“control” may amount to.
18Apparently, MBOSS is far more general than empirical MHD spectral analyses. But onlyEMA has been persued here. A suggestion could be to evaluate robust controller performances byMBOSS-ing the nominal plant. Other usages are clustering of eigenvalues of the system matrixas another approach to EMA in structural mechanics.

38 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
3.3.1 Control of systems in general and in short
In this subsubsection, the words plant and process are used interchangeably. Bycontrol of a system one may mean a range of things. One way is to design theplant so it “controls” itself (e.g. passively stable). This is often a good thing.Plant/process design may here be interpreted as determining parameters so thatthe governing differential equations assume some acceptable behaviour. There arehowever more ways to achieve this than plant parameters. For example the stabilityrequirement of the plant may be relaxed by allowing feedback control to interactwith the process. It may then turn out that the closed system formed by the plantand the feedback (usually software) can be shaped to behave in even better waysthan passive design alone. In general, a complete process can be designed jointly ascomposite of subsystems (i) passive (plant parameters) and (ii) active (feedback)where (ii) also includes the interface consisting of sensor and actuator sets. Usually,to make it tractable, a less holistic approach is taken: first design the process asgood as possibly, then improve it further by feedback design.
Two examples of joint thinking of process designs are (i) open-loop unstablefighter jets and (ii) tokamak plasmas open-loop unstable to vertical displacements.These plants have deliberately been engineered to be unstable (to be software sta-bilised). In (i) the reason is that better manouverability can be achieved in thisway wheras in (ii) it was found that more elongated plasma cross-sections (beingunstable to equilibrium displacements) had the capability to sustain higher plasmaβ (hence more fusion power gain) before hitting the “hard” ballooning mode limit.
The research discipline of “control” arguably began with regulated operationof the steam engine. The so-called “governors” (mechanical contraptions doinganalogue “computation”) were then looked at more theoretically by the polymathand polyglot James Clerk Maxwell [211]. One may call this era of control the-ory as the pre-classical. “Classical” control is usually the basic loop-shaping ideasand the fundamental limitations and sensitivity trade-offs as explored by Bode andNichols and others. In [210] this era is placed in the 1940s and 1950s (its industrialpractice). Then optimisation ideas, optimal control and estimation theory fromapplied mathematics (Pontryagin, Bellman, Kalman and others)19 diffused intocontrol practice during the 1960s and 1970s. It seems this “modern” control andits state-space approach unfortunately did detach slightly from the rough natureof systems as encountered in real-world engineering. Some physical systems wereindeed suited for straightforward finite-dimensional modeling and linear-quadratic-Gaussian (LQG) techniques (examples should be aerospace systems and othersreasonably well approximated by rigid-body mechnics), but others failed (processindustries, fluid systems). “Postmodern” control theory and practice, 1980s and1990s according to [210], took some lessons and worked out means to embed systemuncertainty and robustness explicitly into controller design. Control research was
19Seminal concepts: dynamic programming and the Hamilton-Jacobi-Bellman equation [170],the maximum (minimum) principle [212] and the linear optimal state-space observer.

3.3. AUTOMATIC CONTROL 39
already postmodern in the mid-1990s apparently20 and some argued that the clas-sics had to be re-read [213]; fundamental limitations still cannot be circumventedby formal synthesis machines. Today then, “futuristic” techniques and arenas mayinclude model-predictive control (MPC) which essentially is on-line quadratic costminimisation with input and/or state constraints over a finite-time horizon [214],iterative learning control (ILC) [215] which strives to meet difficult performancerequirements by “learning” the inputs for complex feedforward-feedback scenarios,networked control21, and possibly sensor fusion.
All of this parallels the evolution of computers and computational technology,naturally. But still, the most widely spread and successful piece of control technol-ogy by far is the PID (and similar “simple” feedback laws), well-known since theearly 1940s [216]. PIDs do not even need to be programmed digitally (although nowthey come kitted with autotuning capabilities and such). The embryonic ideas ofPID control have been attempted since the early 1910s, for example in automatedsteering of ships [217]. The reason for their ubiquity is that simple feedback circuitsoften do the job well enough (and quickly enough). Setting up a (post-)modern feed-back system requires considerable modeling efforts and tuning iterations. It turnsout that if no process model is available then a PID-style control is more or lessthe only option. This is also where system identification may enter to help out.
But automatic control is not just an engineering solution to realise a process.It can also be harnessed as an invaluable research instrument. An example isthe feedback amplifier that when it was employed to clamp voltages and currentsover cell membranes lead to breakthroughs in the understanding of ion channeldynamics and in particular the action potential propagation along axons.22 There isa correspondence with the concept of “controlled variable” in applied statistics here.An experimental campaign can be designed where some variables of interest areactually “controlled” (actively). In this thesis, too, the feedback system designs havebeen used for controlled variations in MHD physics studies, by using simple servocapability, or “output-tracking”, of radial boundary magnetic fields. An exampleof automatic control as a more abstract research instrument could be the quitenew field of systems biology where the formulation of biological systems in theframework of systems and control theory may lead to discoveries related to themechanisms governing living matter (also without experiments).
In contrast to the typical automatic control engineering-centered literature, amuch wider perspective on the possible general implications of control, communi-cation, information and systems theory applied to (foremost) the natural sciences
20Postmodern physics has yet to arrive, even though physics was already modern when controlwas barely classical.
21It has indeed been argued that networked control is the “third generation” of control theory.In a plenary talk given at the 48th IEEE Conference on Decision and Control (CDC) 2009, P.R.Kumar suggested that the first generation of control is analog, the second is digital, and the thirdnetworked.
22i.e. the Hodgkin-Huxley model (for which a Nobel Prize was awarded 1963).

40 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
was summarised in the late 1940s by the prodigy-cum-eccentric Norbert Wiener23
[218]. The concept of “cybernetics”24 has a particular specialisation: “cyberneticalphysics” [219] where the unifying idea is to modify (and study [220]) the behaviourof physical systems (in a broad sense) by using the mathematics of control. Incybernetical physics it does not matter whether the physics is classical or modernnor is it of any importance what era of control engineering methods are exploited.Subtopics in cybernetical physics are e.g. optimal control in finite-time thermody-namics, oscillation control, synchronisation control, control of chaotic attractors byinfinitesimal nudges by feedback, and bifurcation/phase-transition control. Notablemethods include the famous Ott-Grebogi-Yorke (OGY) method [221] (can be usedto stabilise unstable periodic orbits (UPOs) of some chaotic systems by operatingon a Poincaré-map in a space of delayed coordinates) and the delayed-feedback-approach introduced by Pyragas [222]. These are very nonlinear control methodswhich were largely invented by physicists. Of course, J.C. Maxwell was one of thepioneers in control-thermodynamics too, as he inaugurated his information-basedand anti-entropic gedankenexperiment starring the dexterous demon.
Also contemporary control theory and engineering research is gradually ap-proaching these grander visions [223]. There are projects in e.g. “fundamental hardlimits” with the ambition to unify and bracket the “reachable space” implied by thecomplex but apparently related and nontrivially intertwined disciplines of systems,control, physics, information, and communication. Example developments includecommunication-constrained feedback stabilisation, robustness in systems biology,finite-time fluctuation-dissipation by nondissipative systems etc.
3.3.2 The control loop & T2R
In this subsubsection a representative T2R control loop is introduced and usedgenerally to explain some concepts relevant for the thesis. The notation may notbe entirely consistent throughout all included papers. The point here is to providea clear overview of the basic closed loop for most of the T2R experiments in thethesis.
Figure 3.4 shows (i) the partitioning of the system (the closed system mostlydealt with in the thesis) into software and hardware regions and (ii) the labeling ofthe involved signals. The symbols are as given below. Note that the disturbancemodel may include a direct term which then would have the effect of direct outputmeasurement noise on y.
G : Passive shell and “external” MHD of T2R.
F : Power amplifier rack. 64 parallel power audio-frequency amplifiers that areused to drive the active saddle loops.
23Inventor of Wiener filter theory in signal processing. Also well-versed in philosophy. Died inStockholm, 1964.
24Etymology: of ancient greek origin, loosely translated as “steermanship”.

3.3. AUTOMATIC CONTROL 41
hardware/physics
DAC
ADC
ADC
power amplifier
T2R passive shell & plasma
assorted disturbances
Σ F Σ
G
Σ− 1Σ
C
H
d
w
r
u u
v e
y
eu
software
Figure 3.4: The workhorse T2R control loop in the thesis, annotated. T2R resis-tive wall MHD belongs to the hardware/physics partition of the information flowand is represented by the system block G. Information flow over the boundary be-tween software/computation and hardware/physics is enabled by analog-to-digitalor digital-to-analog converters (ADCs and DACs) depending on the directionality.

42 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
H : Disturbance system.
C : Software control system.
d : A vector of DAC voltages that are fed to the power amplifier rack F .
u : A vector of currents that flows in the actuator saddle coils outside the resistivedouble-layer copper shell of T2R.
y : A vector of time-integrated radial magnetic field sensor voltages. The voltagesare measured by the sensor saddle coils placed in between the copper shelland the stainless steel vacuum vessel.
r : Vector of reference values for output-tracking (servo control) of y.
w : Vector of extra input used for dither injection. Separation of this from r mayenable easier dithering around nonzero r:s and simplified input design.
v : Vector of disturbances, which is unmeasured.
e : Unmeasured “generator” of the disturbance (as detailed by H).
eu : Measurement error on the “direct” input u to G. Indicates the fact that thedirect identification is errors-in-variables [224].
u : The measurement u + eu.
All outward-pointing arrows from a summation-node in figure 3.4 are equal to eachother for that node. All inward-going arrows are summed-up at the respectivenodes.
3.3.3 Formalisation of control objectives
Figure 3.4 implies
y = T1r + T2w + T3v (3.38a)
u = S1r + S2w + S3v + eu (3.38b)
d = P1r + P2w + P3v (3.38c)

3.3. AUTOMATIC CONTROL 43
with v = He and the following listment of transfer functions
T1 = (I + GFC)−1 GFC (3.39a)
T2 = (I + GFC)−1GF (3.39b)
T3 = (I + GFC)−1 (3.39c)
S1 = (I + FCG)−1FC (3.39d)
S2 = (I + FCG)−1F (3.39e)
S3 = − (I + FCG)−1FC (3.39f)
P1 = (I + CGF )−1 C (3.39g)
P2 = (I + CGF )−1 (3.39h)
P3 = − (I + CGF )−1C (3.39i)
From (3.38) it appears that perfect control (tracking) is achieved if T1 = I canbe realised. And (3.39) implies that e.g. T1 + T3 = I so that would imply T3 = 0which is also perfect (the disturbance v does not propagate into y). But this impliessome sort of infinite-gain control (C ∼ ∞) which for example would make the inputsizes (as seen from Si, or Pi) saturate. Another problem with aiming for T1 = Iappears if the “true error” with respect to the deterministic output of G is studied.Let ζ = (y − v) − r. Then it follows from (3.39) that ζ = T3r + T2w + T1v. SoT1 = I may achieve perfect tracking, but it also has no protection at all against thenoise v.
There are plenty of constraints for a real control system, and usually one cantry to summarise design requirements in some appropriate (and perhaps weighted)system norm of the closed-loop transfer function set (3.39)25.
With some system norm ‖ · ‖ one may now state a formal control synthesis pro-gram by picking suitable transfer functions from (3.39) to reflect the requirementsimposed on the loop. As an example, for disturbance rejection the optimisationproblem
minC
‖T3H‖2 s.t. ‖S3H‖∞ ≤ A and ‖P3H‖∞ ≤ B (3.40)
would mean that one tries to keep the output variance for y as small as possiblewhile keeping the input peak values of both d and u below some limits deemedacceptable. These types of problems involve lots of matrix algebra [210, 209] andmay have to be solved conservatively. In this thesis the formal machinery abovehas not been widely used but rather more practical approaches have been takenas described in the next subsubsection 3.3.4. The reason for this has been the(believed) lack of empirically reliable models to put into the synthesis framework.
25This exposition is a bit unusual perhaps as it includes an extra “dither” input w.

44 CHAPTER 3. EXPERIMENTAL MODAL ANALYSIS AND CONTROL
3.3.4 Two semiclassical ideas used in the thesis
Two simple modeling and control ideas have been used in the papers below: (i)PID tuning rules and (ii) direct output RMS minimisation. In reference [32], anindustrial PID tuning rule for integrating and unstable second-order processes wasemployed. No direct use of any detailed plasma response model was exploited. Inreferences [37] and [42] the H2-norm of the closed-loop transfer function mappingdisturbance to output was optimised. In [37] the approach was to first decouplethe MIMO problem into a set of SISO problems, one for each DFT component ofthe input-output arrays. A similarly constrained system identification result wasused to achieve this. The direct minimisation of the SISO norms was implementedby simple finite-differences and a fixed-order control system. In [42] this approachwas extended to general MIMO systems harnessing a matrix differentiation result,which is detailed in subsection A.4.

Chapter 4
Resistive wall MHD inEXTRAP T2R
This section summarises (i) experimentally closed-loop measured MHD stability(ii) measured vacuum-diffusion (iii) theoretical ideal and resistive “slow” MHD and(iv) experimentally controlled MHD stability, all for EXTRAP T2R. Method detailsand development can be found above and in the papers. Some early results fromclosed-loop RFX-mod operation are also presented.
4.1 The nonparametric empirical result
Figure 4.1 depicts the main results of applying MBOSS EMA to T2R datasets.The identification was performed in a “direct” way using the signals u and y asdefined in subsubsection 3.3.2 and figure 3.4. The figures show the magnitudes ρ ofthe discrete-time eigenvalues of the estimated systems plotted against the toroidalmode-number n. A poloidal mode-number m = 1 is assumed. This geometricalprojection is nowhere imposed in the actual system identification program. HelicalFourier modes are only used in the visualisation of the identified systems. Figure4.1 shows an “input-to-output” geometry in the sense that both the system B andC matrices are used.
Specifically the following procedure is applied. For each (bootstrapped) DTLTIsystem estimate diagonalise its A-matrix to obtain the “modal” coordinate represen-tation. This “modal innovation form” is obtained by the coordinate transformationx = T x applied to (3.5), with T ∈ Cn×n such that A = T AT −1 = Λ is a diagonalmatrix.
x(k + 1) = Λx(k) + Bu(k) + Ke(k) (4.1a)
y(k) = Cx(k) + Du(k) + e(k) (4.1b)
It is seen that B = T B, K = T K, and C = CT −1. Each state component of (4.1)is an eigenmode. Each eigenmode i evolves independently of the other eigenmodes
45

46 CHAPTER 4. RESISTIVE WALL MHD IN EXTRAP T2R
j 6= i. The ith eigenmode is governed by
xi(k + 1) = λixi(k) + bTi u(k) + kT
i e(k) (4.2a)
yi(k) = cixi(k) (4.2b)
where λi is the ith diagonal element of Λ, bTi the ith row of B, kT
i the ith row of Kand ci the ith column of C. The full system output is a summation of the parallelsystems (4.2) for i = 1 . . . n: y(k) =
∑ni=1 yi(k) + Du(k) + e(k).
The idea is now to visualise the eigenmodes (4.2) using the input-output pro-jection
G(j)n1,n2
(ρ) =1h
n∑
i=1
w∗n1
cibTi wn2
ρeιφi − λi
exp(−(φi − φ0)2/(2h2)
)(4.3)
where n = dim (x), ι2 = −1, φi is the argument of λi and wn a vector thatrepresents the transformation to Fourier space from real space (essentially a row ina DFT matrix). The superscript (·)(j) is supposed to allude to the fact that themodal parameters in (4.3) belong to the jth bootstrap plant sample. In particularthe quantity
log10
∣∣∣G(j)n,n(ρ)
∣∣∣ (4.4)
has been accumulated and smoothed using bootstrap resampling in figures 4.1(a)and 4.1(b). For these plots h = π/24, and 100 balanced bootstrap samples weretaken. The SSARX horizon parameters used here was; future f = 15, past p = 25,pre-VARX-past q = 30. The CVA order truncation was n = 600. Different valueswere used in paper V below. The results seem robust and does not strongly dependon the SIM parameters. For this case, around 30 bootstrap samples typically yielda smooth plot which does not change very much as more samples are accumulated.The purpose of the exponential forgetting width h is to target the spectral analysisaround a region of frequencies centered at φ0. In this case, shell-diffusion-dominatedMHD justifies φ0 = 0. Hence, equation (4.4) may be thought of as a possiblerepresentation of an eigenvalue density (with logarithmic scale) in the stability-wavenumber (ρ-n) plane for zero-frequency modes.
The double-branch vacuum diffusion spectrum observed in figure 4.1(a) maybe interpreted as representing two rates for “polarised” field penetration. This isshown in figure 4.2. The explanation is that the copper resistive shell coveringthe stainless steel vacuum vessel of T2R is composed of half-torus shells slicedalong the horizontal plane and bolted together with flanges. T2R has two suchlayers of copper, each also slotted in the vertical plane at a certain toroidal angle.This patched arrangement hinders full-turn toroidal and/or poloidal shell currents.But the horizontal cut also allows faster magnetic field diffusion in the horizontaldirection, compared to the purely vertical field diffusion rate. Precisely this appearsto be picked up by the SIM application to the vacuum system in figure 4.1(a). Itis noted from figure 4.2 that homogenous shell theory approximately describes theupper branch (vertical field rate) but the pole decay rate seems wrong for the lower

4.1. THE NONPARAMETRIC EMPIRICAL RESULT 47
n
ρ
−15 −10 −5 0 5 10 150.94
0.96
0.98
1
1.02
1.04
1.06
(a) Nonparametric vacuum diffusion spectrum.
n
ρ
−15 −10 −5 0 5 10 150.94
0.96
0.98
1
1.02
1.04
1.06
(b) Nonparametric external MHD spectrum
Figure 4.1: Application of multibatch bootstrapped subspace system identification(i.e. MBOSS) for modal analysis of T2R. 100 bootstrap resamplings were made.The SSARX horizon parameters were f = 15, p = 25, q = 30 and n = 600. TheDTLTI stability limit is ρ = 1 (ρ > 1 for instability).

48 CHAPTER 4. RESISTIVE WALL MHD IN EXTRAP T2R
branch. The effects of spatial aliasing are likely to affect the empirical spectratowards the edges |n| & 10 in figure 4.1.
2 4 6 8 10 12 14 160.94
0.945
0.95
0.955
0.96
0.965
0.97
0.975
0.98
0.985
φ=0
φ=π/4
φ=π/2
n
max
j |λj(A
n)|
Figure 4.2: Probing of the identified vacuum diffusion model along various anglesφ for the toroidal harmonics ±n (using random phasings). The blue line (withasterisk markers) shows an idealised homogenous shell case for a nominal T2R longwall time. An angle φ = 0 corresponds to a horizontal field penetration, φ = π/2corresponds to a vertical field penetration, and φ = π/4 is an intermediate obliquecase. It seems the lower and upper branches in subfigure 4.1(a) are, respectively,similar to the φ = 0 and φ = π/2 cases here.
4.2 The ideal shell-diffusive MHD spectra
For the RFP it has been found that experimental equilibria (steady-states) can beapproximately described by e.g. the (α, Θ0, χ)-parameterisation detailed as follows(see e.g. [225, 226]).

4.2. THE IDEAL SHELL-DIFFUSIVE MHD SPECTRA 49
∂
∂rbθ = −bθ/r + µbz − (1/2)
bθ
b2
∂
∂rβ (4.5a)
∂
∂rbz = −µbθ + (1/2)
bz
b2
∂
∂rβ (4.5b)
∂
∂rβ = −χr
(bz/r − µb2/(2bθ)
)2
(4.5c)
In (4.5) we have introduced µ(r) = aµ(r) = 2Θ0 (1 − rα), and redefined
β = 2µ0p0/b20 = 2p (4.6)
and used b2 = b2θ + b2
z. Boundary condition for (4.5) is
bθ/r → µ(0)/2 as r → 0+ (4.7)
and bz(0) = 1 as b0 = b0z(0) (if b0 is the on-axis toroidal field).
The nondimensionalisation is further detailed in subsection A.1 below. If theseprofiles are used as input to the ideal MHD RWM eigenproblem detailed in sub-section A.1 then typical RFP stability spectra are obtained. These are so-calledfree-boundary modes where the plasma occupies 0 ≤ r ≤ a and a < r < b is a layerof vacuum. The resistive wall is located at r = b. The wall is modeled as a “thin”wall. Two cases will be shown here: (i) for T2R parameters and (ii) for RFX-modparameters. These are shown in subfigures 4.3(a) and 4.3(b) respectively. Figure4.3 is to be compared to the geometry depicted in the fully empirical system plotsshown in figure 4.1.
The theoretical spectra shown in figure 4.3 are normalised to the respectivecontrol cycle times for the two different experimental devices. Further, the rangeof the toroidal mode number n spans the spatial-DFT resolvable range for therespective plant. Specifically, the following parameters were used for the equilibriumequations given above and the eigenproblem detailed in supplementary subsectionA.1.
symbol EXTRAP T2R RFX-mod commenta 0.183 0.459 plasma minor radius (m)R 1.24 2.00 plasma major radius (m)b 0.198 0.514 wall radial position (m)τw 12 114 effective wall time constant (ms)τ0 0.33 0.19 Alfvénic transit time (µs)F -0.25 -0.07 approximate reversal parameterΘ 1.60 1.43 approximate pinch parameterτs 100 400 control cycle time (µs)
The Alfvén transit time is here defined as τ0 = (a/B0)√
µ0nemp where B0 is theon-axis toroidal field strength, ne the electron number density, and mp the proton

50 CHAPTER 4. RESISTIVE WALL MHD IN EXTRAP T2R
−15 −10 −5 0 5 10 150.94
0.95
0.96
0.97
0.98
0.99
1
1.01
1.02
1.03
1.04
n(m = 1)
exp(τ
sγ
mn)
ideal-MHD-poles for F =-0.24, Θ =1.6, 〈β〉 =0
G1, ΓG0
(a) Ideal resistive wall MHD stability for typical T2R parameters.
−20 −15 −10 −5 0 5 10 15 200.94
0.95
0.96
0.97
0.98
0.99
1
1.01
1.02
1.03
1.04
n(m = 1)
exp(τ
sγ
mn)
ideal-MHD-poles for F =-0.07, Θ =1.43, 〈β〉 =0
G1, ΓG0
(b) Ideal resistive wall MHD stability for typical RFX-mod parameters.
Figure 4.3: Theoretical ideal MHD RFP resistive wall boundary condition spectralradii. The discrete-time maximum modulus eigenvalues are shown as a functionof the toroidal mode number n. The green markers in subfigure 4.3(a) are to becompared to the empirical vacuum diffusion in subfigure 4.1(a). The blue markersin subfigure 4.3(a) can be compared to the empirical RFP plasma stability shownin subfigure 4.1(b) above.

4.3. MORE GENERAL RESISTIVE MHD SPECTRA 51
mass (hydrogen plasma).1 This τ0 is the MHD characteristic time-scale which is onthe microsecond order, far below the wall time scale of several (tens of) milliseconds.The eigenproblem uses the normalised ratio τw/τ0 which is ≈ 3 × 104 for the T2Rparameters above and ≈ 6 × 105 for the given RFX-mod parameters. Note thatthe control cycle times are set to sample the resistive wall time-scale and not theactual MHD wave-physics time-scale. The reversal parameter F is defined as theratio of the edge toroidal field over the average toroidal field. The pinch parameterΘ is defined as the ratio of the edge poloidal field over the average toroidal field.F and Θ are common macro-parameters used to quantify the experimental RFPsteady-state.
The number of unstable modes in subfigure 4.3(b) is smaller than the numberof unstable modes in subfigure 4.3(a). This is an effect of the higher aspect ratioof T2R: ≈ 6.8 against ≈ 4.36 for RFX-mod. Another difference between thesemachines which may be essential for system identification is the ratio of plasmacurrent lifetimes to the wall time constant. For T2R it is possible to collect flat-topinput-output data for several (currently up to 5 − 6 long wall times) wall-times.At RFX this is possible for maximum one single long wall-time. It is mentionedin the outlook subsection 6.2 below that to successfully utilise the SIM methodsbetter with less amount of data mayhaps some regularisation technique should beimplemented.
4.3 More general resistive MHD spectra
For T2R it would seem, from the viewgraphs above (figures 4.1 and 4.3), that idealMHD and cylindrical geometry can explain the empirical spectrum reasonably well.Ideal MHD is however not a completely adequate model for RFPs. At least basicresistive MHD is required to address resonant instabilities. For RFP plasmas thatdo not rotate as fast as in T2R such modes tend to lock to the wall and grow quickly(in case there is no effective feedback). This section will briefly show an early resultfrom RFX-mod closed-loop operational data. The signal analysis of this datasetamounts to a generic SIM-MBOSS application to a MIMO system with 192 inputsand 192 outputs. The important point is that the input-to-output spectrum thatis obtained is believed to be dominated by “locked” resistive MHD modes.
A general resistive MHD eigenproblem is formulated in subsection A.3. TheSIM parameters used for the signal processing was f = 15, p = 30, q = 35 andn = 1000. Multifold (10-fold) cross-validation was used to justify the high systemorder. 50 bootstrap replications were generated. Note that this is a quite large-scalecomputation which requires several gigabytes of memory to run.
To be able to interpret figure 4.4 in terms of MHD a set of full solutions to theeigenproblem in subsection A.3 is needed. Specifically the resistive wall boundaryconditions must be enforced.
1Here for T2R: ne = (1 − 2) × 1019 m−3, B0 = 0.1 T. And for RFX-mod: ne = (2 − 5) ×1019 m−3, B0 = 0.7 T. Further mp ≈ 1.6726 × 10−27 kg.

52 CHAPTER 4. RESISTIVE WALL MHD IN EXTRAP T2R
n
ρ
−20 −15 −10 −5 0 5 10 15 200.94
0.96
0.98
1
1.02
1.04
1.06
Figure 4.4: RFX-mod wave-number stability.
As anticipated in the above paragraphs, figure 4.3(b) does not seem to explainfigure 4.4.
4.4 Experimental output-tracking results
I used to encourage everyone Iknew to make art; I don’t do thatso much anymore.
Banksy (recorded 2010?)
This subsection shows two examples of T2R boundary radial magnetic fieldoutput-tracking using the full-coverage coil system. For these two cases the time-varying reference was generated in real-time using a linear interpolation in thespatial Fourier domain, and then transformed (using FFT) to real-space where theapproximately decentralised intelligent-shell feedback law detailed in [32] operates.Figure 4.5 shows data from T2R shot #21679. A sweeping on-off toggling of thefull range of resolvable mode-numbers is observed in subfigure 4.5(a). The hereapplied active coil array current harmonics time-trace is shown in subfigure 4.5(b).
A more popular T2R discharge was performed in the same campaign but slightlyearlier; shot-number #21676 is visualised in figure 4.6. Subfigure 4.6(a) depicts a

4.4. EXPERIMENTAL OUTPUT-TRACKING RESULTS 53
t [ms]
mod
enum
ber
n (m
=1)
Output spatial spectrum |Y|
10 20 30 40 50 60 70
−15
−10
−5
0
5
10
15
(a) Boundary radial magnetic field y.
t [ms]
mod
enum
ber
n (m
=1)
Input spatial spectrum |U|
10 20 30 40 50 60 70
−15
−10
−5
0
5
10
15
(b) Applied input current u.
Figure 4.5: T2R shot #21679. Test of output-tracking capabilities. Sweeping case.

54 CHAPTER 4. RESISTIVE WALL MHD IN EXTRAP T2R
classic smiley-face doodle, sustained in spatial Fourier space of the boundary radialmagnetic field of T2R. Subfigure 4.6(b) shows the here required active coil currentinput. More specifically for this shot, the Fourier space time-varying referencewas parameterised by the set of 8 real-valued numbers {n1, n2, a1, a2, t1, t2, t3, t4}describing three facial features
n(t) = n1 + a1 cos{π
2(t − t3) /t1
}|t − t3| ≤ t1 (mouth)
n(t) = n2 + a2 {t − (t3 − t2)} |t3 − t2 − t| ≤ t4 and t < t3 (left eye)
n(t) = n2 + a2 {t − (t3 + t2)} |t3 + t2 − t| ≤ t4 and t > t3 (right eye)
where n1 and n2 are the helical mode baselines for the mouth and the eyes, respec-tively. The size of the grin is determined by the amplitude a1, and the inclinationof the eyes is determined by a2 (zero for this case). The mouth-width is set by t1,and the width of the eyes is given by t4. The smiley is temporally centered aroundt3. The distance between the centres of the eyes is specified by t2. Linear interpo-lation was used for the non-integer values of n(t) (e.g. let ξ(t) = n(t) − floor (n(t)),then 1 − ξ is the fraction of the set-point amplitude to be assigned to DFT compo-nent floor (n) at t, and the remaining fraction ξ is added onto the DFT componentabove).
It can be observed that to sustain the “eye” of the doodle, only a small input“kick” is required at onset, and a similar kick at eye-termination. In between only asmall input balances the field harmonic at its reference, as determined by feedback.This is a general feature of marginal and unstable systems. Another observationis the large input required for n = ±2 in both shots, as seen in subfigures 4.5(b)and 4.6(b). This is the characteristic error field geometry for T2R. What is seen isdynamic error field compensation due to feedback. The n = ±2 signature is presentfor each and every T2R discharge.
The output-tracking demonstrated in figures 4.5 and 4.6 has important applica-tions. It was shown in [25] that the output-tracking feature can be used to provideresonant magnetic perturbations (RMPs) for the purpose of studying the dynamicsof core-plasma tearing-modes (TMs). The basic idea is to program the sustain-ment of constant harmonics (coinciding with either a stable, unstable or marginalexternal mode) at the edge that penetrates into the plasma and couples to rotatingTMs [228]. There are phenomenological models for how this RMP interacts withTMs (e.g. [229]). These nonlinear models can be assessed in some detail by theoutput-tracking technique.
More recently, nonresonant magnetic perturbations (NRMPs) have been appliedin conjunction with RMPs at T2R. The point with this is to affect the plasmafluid velocity globally by a nonresonant braking mechanism using the NRMP. Thenthe RMP interaction can be superimposed to study TM dynamics at a range ofbackground velocities not constrained to the intrinsic velocity alone. Some resultscan be found in [27, 28].

4.4. EXPERIMENTAL OUTPUT-TRACKING RESULTS 55
t [ms]
mod
enum
ber
n (m
=1)
Output spatial spectrum |Y|
10 20 30 40 50 60 70
−15
−10
−5
0
5
10
15
(a) Boundary radial magnetic field y.
t [ms]
mod
enum
ber
n (m
=1)
Input spatial spectrum |U|
10 20 30 40 50 60 70
−15
−10
−5
0
5
10
15
(b) Applied input current u.
Figure 4.6: T2R shot #21676. Test of output-tracking capabilities. This, it seems,is the Kodak moment of the thesis. Featured in the outreach article [227], in anRFP-talk given at the International ITER Summer School on Plasma Control heldin Austin (Texas, US) 2010, and in a semiplenary RFP-talk given at the AmericanPhysical Society (APS) meeting on Plasma Physics 2009.


Chapter 5
On the paperwork
In future, write withoutelaboration. Use plain clearwords. It will be easier both foryou and for the reader.
Babur (1483-1530)
5.1 Overview and chronology
Figure 5.1 presents a graphical overview of refereed first-author publications leadingtowards this thesis. The publications and abbreviations in this graph are introducedand explained in the next subsection 5.2. A chronology is somewhat implied by thestructure of the self-citations. It can be observed that two papers appear to playa central role, namely (i) fead08 and (ii) cdc09. A green colour indicates thatthe publication mainly deals with system identification (in all cases except ifac12,this is applied to T2R). A blue colour indicates that the paper has controller setupand implementation as the main theme (in all cases applied to T2R). The grey-coloured folders in the graph are comprehensive summaries (this thesis phd12 andthe Licentiate thesis lic10). These folders point only to the papers they include infull-text.
An important point with figure 5.1 is to convey the fact that the different parts ofthis thesis have turned out to form a relatively self-contained project substantiallyconsisting of incremental developments. The papers can be seen as “technologysnapshots” of system identification techniques conceived for and tried-out on T2R.At some stages it was deemed meaningful to reimplement the control system basedon new identification results, but the measurement technique itself has been thecentral theme throughout the project.
57

58 CHAPTER 5. ON THE PAPERWORK
fead08
cdc08
tps09
msc09cdc09
ppcf10
ppcf12
cdc10
ppcf11
cdc11
fead11
lic10
ifac12
phd12
Figure 5.1: Self-citation directed graph for the first-author publications undergonepeer-review. An arrow from A to B indicates that A cites B. Green-coloured itemshave a system identification theme. Blue-coloured items have (mainly) a theme ofcontrol setup and implementation.

5.2. ARTICLE REMARKS 59
5.2 Article remarks
A commented listing of the first-author publications are given below. Only pa-pers that have gone through peer-review are listed. The bold-faced abbreviations(consult the glossary in appendix C) connect to figure 5.1.
cdc08 : Not included in thesis. Conference proceeding [31]. Considers time-delayaspects of the fixed-structure basic PID-loop already implemented at T2R atthis time. A delay-differential-equation approach (DDE) is used in order torecompute better PID gains. The spectral abscissa of the closed-system DDEis optimised for this purpose. Theoretical background material can be foundin the monograph [230]. The gains are implemented and a set of experimentsshows some improvement in boundary field suppression.
fead08 : Paper I below; Controlled magnetohydrodynamic mode sustainment inthe reversed-field pinch: theory, design and experiments. Journal article [32].Details a practical tuning-rule-based process-oriented reimplementation of anintelligent-shell-type pseudo-decentralised PID controller. The first resultson successful output-tracking are communicated. This work documents theworkhorse controller used in the background of the dithering experiments tocome below in this listing. This particular implementation turns out to becapable also of generating the output-tracking doodles shown in subsection4.4 above. Some in silico inspiration for the controller retooling can be foundin [30].
msc09 : Not included in thesis. Conference proceeding [33]. Simple parametricmodelling of the T2R plasma response and its experimental identification.The first published result on nonaxisymmetric dithering of the T2R plasma.
cdc09 : Paper II below; Vector dither experiment design and direct parametricidentification of reversed-field pinch normal modes. Conference proceeding[34]. Design and deployment of a vector dither input for T2R system identi-fication. Features LMI input design optimisation. Also details an extendedsimple parametric modelling of the T2R dynamics including the effect of nom-inal spatial aliasing. Uses basic PEM identification and a Kalman filter forevaluation of the prediction error.
tps09 : Not included in thesis. Journal article [36]. Details the exploitation of thesystem identification results from cdc09 for a control reconfiguration. Someexperimental results and other material not reported in ppcf10 are included,but ppcf10 is a more complete communication of these results.
ppcf10 : Not included in thesis. Journal article [37]. FFT-decoupled approachto control design at T2R. Output-tracking re-confirmed. Also a more formalsynthesis procedure compared to the process-industry approach of fead08. Itwas further attempted to formulate the clean-mode-control (CMC) concept of

60 CHAPTER 5. ON THE PAPERWORK
Zanca et. al. which is important at RFX-mod. RMS minimisation synthesiswas pursued as a set of SISO problems, one problem for each spatial DFTcomponent. It was later confirmed in [26] that the implementation indeedwas able to further reduce the boundary magnetic field RMS compared tothe other control implementations at T2R.
lic10 : Licentiate thesis [38]. Bundles the papers fead08, msc09, cdc09 andppcf10. Further contains a fairly detailed derivation of the simple boundary-value ODE eigenproblem which is solved to obtain the ideal MHD RWMtheoretical spectra shown above.
cdc10 : Not included in thesis. Conference proceeding [35]. A first full MIMOattempt at modal analysis of T2R. Contains important ideas and precursorsfor the later developments.
ppcf11 : Paper III below; Predictor-based multivariable closed-loop system identi-fication of the EXTRAP T2R reversed field pinch external plasma response.Journal article [39]. The first subspace-like system identification applicationat T2R. The ERA method was utilised to estimate eigenvalues of the plasmaresponse.
cdc11 : Paper IV below; Cascade and multibatch subspace system identification formultivariate vacuum-plasma response characterisation. Conference proceed-ing [40]. The formulation of the multibatch remix of the SSARX method. Thepaper also details a possibly useful way to separate the vacuum and plasmaparts of the measured external response at T2R.
fead11 : Paper V below; Measurements of the vacuum-plasma response in EX-TRAP T2R using generic closed-loop subspace system identification. Journalarticle [43]. The application of MBOSS for a statistically reliable visualisationof EMA applied to T2R. Arguably, this article in conjunction with cdc11 [40]together document the key results in the thesis.
ppcf12 : Paper VI below; A first attempt at few-coils and low-coverage RWMstabilisation of EXTRAP T2R. Journal article [42]. An ambitious attemptto stabilise the T2R RFP plasma by using a small subset of the actuator coilarray. MIMO RMS minimisation attempted using randomised subsets. Thework is intended to suggest and emphasise various potential possibilities andproblems associated with model-based assumptions and (lack of) robustness.Nonaxisymmetric mode-control may require a sensible (realistic and useful)concept of mode-rigidity and should only depend on the reliable features of aRWM MHD model.
ifac12 : Not included in thesis. Conference proceeding [41]. A novel MIMO non-parametric input design approach using subspace methods with possible ap-plications to EMA in general. The key idea here is to exploit the ordered Schur

5.3. IMPLEMENTATION, DEPLOYMENT AND REALISATION 61
decomposition to “zoom-in” on particular eigenvalues of interest. The paperillustrates the methodology numerically by applying it on a one-dimensionalwave-equation example.
phd12 : This thesis. Bundles the 6 papers I fead08, II cdc09, III ppcf11, IVcdc11, V fead11 and VI ppcf12, appended below. Tries to convey a senseof coherence among the publications. Highlights some results. Illustrates themost relevant identification and modal analysis methods.
5.3 Implementation, deployment and realisation
If the code doesn’t bother you,don’t bother it.
General programming wisdom
The ambition of the work has consistently been to obtain results experimen-tally, and gain empirical knowledge related to RFP plasma control and MHD ingeneral. This has required a large amount of programming: (i) for signal process-ing implementations (ii) controller synthesis optimisation (iii) real-time softwaredevelopment and deployment. Experimental realisation can be more rewarding butusually costs in terms of man-hours spent on seemingly annoying and unneccessaryobstacles. The currently available real-time hardware at T2R has been a bottleneckfor the later projects in particular. It has turned out to be awkward and cumber-some to make the desired algorithms run at the required 10 kHz feedback loop rate.Quite low-level programming details have been invoked to gain computational speedas alluded to in [37]. This amounts to lots of extra work and effort which is strictlynot part of the thesis, from the academic perspective. Examples are optimisationof matrix-vector data storage for higher multiply-accumulate (MACC) instructionthroughput, and machine-tailored FFT implementations. Importantly, much hasbeen achieved with the spartan but available resources. However, to properly ex-ploit the full MIMO system identification results (& 500 states and 64 inputs and64 outputs) and step further beyond the study of [42], optimisation of real-timeimplementations and tweaking of instruction-level codes are not options anymore.The study [42] suffers from this limitation already.


Chapter 6
Conclusions and outlook
6.1 Conclusion
The main message of subsection 1.3 is here reiterated: physics modeling (for non-axisymmetric resistive-wall MHD control) should focus on predictive qualitites andbounding of uncertainties since these are likely required to formulate robust sta-bility and performance objectives. It is well known that MIMO systems may bevery sensitive to small uncertainties and this seems to be a possible issue in RWMcontrol, specifically when it is a desire to use as few actuators as possible (these arecostly and may be difficult to install and protect in the neutronic environment in areactor). The system identification application developed in this thesis is arguablya step in this direction.
In addition, the usage of the radial magnetic field output-tracking capabilityhas already proven itself useful in MHD physics studies at T2R. The examples thatwere experimentally realised and shown here are meant to suggest potentially noveldevelopments in experimental MHD boundary control.
6.2 Outlook
Possible future directions of research may include: (i) extension of the systemidentification modal analysis techniques (modeling and identification aiming forthe structured singular value [231, 232] uncertainty description appears useful) tomore explicitly address the issue of “mode-rigidity” among other things (e.g. MHDparameter and profile sensitivity [233]) (ii) better interpretation against MHD the-ory (this may involve “pseudospectra” [234, 235, 236] and should involve resistiveMHD) (iii) implementation of tailored regularisation techniques (in particular fore.g. time-wise smoothness and spatial periodicity [151, 237]) for the subspace iden-tification methods employed here in order to facilitate better estimation accuracyfor e.g. shorter datasets (iv) the obviously needed real-time computational hard-ware upgrade for T2R (see subsection 5.3) (v) further theoretical investigations on
63

64 CHAPTER 6. CONCLUSIONS AND OUTLOOK
the potential benefits and limitations with magnetic boundary feedback control inthe context of both nonlinear and linear resistive MHD (vi) fully formalised robustMIMO control syntheses based on Efron-bootstrapped sets of plant estimates anddeployment of such controllers (vii) exploration of monitoring and adaptive controlpotential (in particular for robust safety-critical adaptive control techniques [238])(viii) real-time MPC techniques (ix) searching for connections and possible analo-gons to work being pursued for Navier-Stokes fluid flow control and boundary layertransitions [239, 240, 241] (x) continued usage of the output-tracking as an instru-ment for MHD physics studies (currently being used as a knob to measure possibleneoclassical toroidal viscosity torque in T2R, another possibility is nonlinear MHDstudies by dithering around a sustained nonaxisymmetric baseline perturbation)(xi) searching for opportunities for exploiting plant spatial invariances for controldesign [242] (xii) improved usage of structural information in the identificationalgorithms.

Appendix A
Supplementary material
A.1 Basic ideal MHD stability with cylindrical shell
It can be justified (see [38] for a fairly detailed derivation) that the ideal MHDstability of a cylindrical periodic RFP plasma with a homogenous cylindrical re-sistive shell boundary condition can be represented by the simple modal evolutionequation
τmk bmk − γmkbmk = amkbc (A.1)
approximately valid on the thin-shell resistive diffusion time-scale. The wall-timenormalised growth rate is
γmk = −ιτmk
τ0ω (A.2)
the modal wall time is
τmk = −τw
Iwm
′Kwm
′
1 + m2
k2r2w
> 0 (A.3)
expressed in modified Bessel functions [243], and
amk = −dk2rcIwm
′Kcm
′ > 0 (A.4)
is a dimensionless geometrical factor. Here τw = µ0σdrw is the nominal “long” walltime, d the wall thickness and σ the electrical conductivity of the wall. Some basicproperties of (A.1) are
γmk > 0 instability
0 > γmk > −1 amplification
−1 > γmk attenuation
and the particular case γmk = −1 renders (A.1) equivalent the vacuum-only (no-plasma) situation. Hence for all (m, k) such that γmk = −1 the temporal mode
65

66 APPENDIX A. SUPPLEMENTARY MATERIAL
dynamics is not affected by the plasma (although the eigenmodes’ profiles are dif-ferent).
The growth rate γmk in (A.1) is given by the ODE boundary value eigenproblem[244] defined by
Dr∂
∂ry1 = c11y1 + c12y2 (A.5a)
Dr∂
∂ry2 = c21y1 − c11y2 (A.5b)
where
y1 = rξ = (r/a)(ξr/a) (A.6a)
y2 = p⋆/(ρ0v20) = µ0p⋆/b2
0 (A.6b)
c11 = 2{
bθ
m
rf − b2
θΛ}
(A.6c)
c12 = r2Λ − m2 − k2r2 (A.6d)
c21 = −D2 + 2Dbθ
∂
∂r
(bθ
r
)
+4
(bθ
r
)2 {f2 − Λb2
θ
}(A.6e)
D = −ρω2 + f2 (A.6f)
f =m
rbθ + kbz (A.6g)
Λ =ρ2ω4
ρω2(
b2 + γp)
− γpf2(A.6h)
with b2 = b2θ + b2
z, and γ = 5/3 is the adiabatic index. The RWM boundarycondition is e.g. formulated as
0 = iωτmk
τ0+ Iw
m′fy(ω2) (A.7)
where
fy(ω2) =Km
af2y1 + K ′m
a|k|y2
(−I ′m
wKma + K ′
mwIa
m) f2y1 + (−I ′m
wK ′m
a + K ′m
wI ′m
a) |k|y2
(A.8)
only depends on the square of the eigenvalue since the system (A.5) applies toideal MHD (and only so). As a reference, a general viscoresistive eigenproblem hashigher dimensionality and is found in subsection A.3.

A.2. A CASCADE VACUUM-PLASMA RESPONSE SEPARATION 67
The normalisation used for the eigenproblem above is
v0 = b0/√
µ0ρ0 (A.9a)
τ0 = a/v0 (A.9b)
ω = ωτ0 (A.9c)
r = r/a (A.9d)
ρ = ρ0/ρ0 (A.9e)
p = p0/(ρ0v20) = µ0p0/b2
0 = (1/2)β (A.9f)
k = ka (A.9g)
bθ = b0θ/b0 (A.9h)
bz = b0z/b0 (A.9i)
ξ = ξr/a (A.9j)
and the equilibrium quantities (·)0 are defined by the MHD equilibrium equations.For the RFP the typical case is described above in subsection 4.2.
A.2 A cascade vacuum-plasma response separation
Recall (subsection A.1) the prototype modal equation for vacuum diffusion
τmk b0mk + b0
mk = amkbc (A.10)
and with plasma present
τmk b1mk − γmkb1
mk = amkbc (A.11)
Introduce the transfer functions
G0(s) =amk
τmks + 1(A.12)
andG1(s) =
amk
τmks − γmk
(A.13)
respectively for (A.10) and (A.11). It follows that
G1(s) = (1 + Γ(s)) G0(s) (A.14)
with
Γ(s) =1 + γmk
τmks − γmk
(A.15)
This is useful in attempts to separate the passive external conductor from theplasma response. Γ(s) of equation (A.15) contains the “plasma-pole” and vanishes

68 APPENDIX A. SUPPLEMENTARY MATERIAL
as the growth-rate approaches the vacuum system. This means that the plasmaresponse may be estimated by signal preprocessing as follows.
Let b0 = G0(s)u and b1 = G1(s)u = b0 + Γ(s)G0(s)u = b0 + Γ(s)b0. So itappears fruitful to remove the (possibly complex) vacuum diffusion signature byintroducing δb = b1 − b0 and identifying the system Γ(s) with input b0 and outputδb. Since G0(s) is stable, b0 is easy to simulate from u = bc obtained from plasmaexperiment data.
A.3 Basic eigenproblem for viscoresistive MHD
The purpose of this subsection is to re-emphasise the quite direct connection be-tween the experimental modal analysis of the RFP plasma performed in this thesisto the general MHD eigenproblem subject to certain boundary conditions (the re-sistive wall). A proper comparison of MHD modelling and experimental stabilityresults for RFP plasmas should involve at least resistive MHD in this case, sincethe full range of spatial modes covered by the dithering experiments detailed aboveinclude both resonant and nonresonant toroidal mode-numbers.
A basic version of the governing equations for compressible and visco-resistiveMHD [245, 246, 247, 248] can be summarised by
∂tρ = −∇ · (ρv) (A.16a)
∂tb = ∇ × (v × b) − 1µ0
∇ × (η∇ × b) (A.16b)
ρ∂tv = −ρv · ∇v − ∇p +1µ0
(∇ × b) × b + νρ∇2v (A.16c)
∂tp = −v · ∇p − γp∇ · v +(1 − γ)η
µ20
|∇ × b|2 (A.16d)
where the scalar resistivity is η, the scalar viscosity is ν and the gas-constant isγ = 5/3. The PDE (A.16) is nonlinear with a field solution composed of eightscalars (ρ, p, b and v) at each spatiotemporal point (x, t). The solution must obey∇ · b = 0 as usual.
The nondimensional form of system (A.16) is obtained by setting µ0 = 1 andinterpreting the viscosity ν as the inverse Reynolds number and interpreting theresistivity η as the inverse Lundquist number1. These numbers are respectivelydefined by
1Re
=ν
vAL(A.17)
and1
Rm=
η
µ0vAL(A.18)
1Also known as the magnetic Reynolds number

A.3. BASIC EIGENPROBLEM FOR VISCORESISTIVE MHD 69
where L is a characteristic length and the Alfvén velocity is defined by
vA = B(0)/√
µ0ρ(0) (A.19)
with B(0), ρ(0) respectively being the characteristic magnetic field and density forthe setup.
Assuming a static equilibrium (ie. v0 = 0) the linearised system reads
∂tρ1 = −∇ · (ρ0v1) (A.20a)
∂tb1 = ∇ × (v1 × b0) − 1µ0
∇ × (η∇ × b1) (A.20b)
ρ0∂tv1 = −∇p1 + ρ0ν∇2v1
+1µ0
(∇ × b1) × b0 +1µ0
(∇ × b0) × b1 (A.20c)
∂tp1 = −v1 · ∇p0 − γp0∇ · v1
+2η1 − γ
µ20
(∇ × b0) · (∇ × b1) (A.20d)
subject to ∇ · b1 = 0. Here (·)0 are equilibrium quantities and (·)1 are (linearised)perturbed quantities. The equation for the perturbed density ρ1 in system (A.20)turns out to be decoupled from the other equations. This fact together with thedivergence-free requirement for b1 implies that only six scalars (at each spatialpoint) are needed for a final eigenproblem formulation.
A cylindrical solution ansatz p1(t, r, θ, z) = p1(r)eλt+ι(mθ+kz) is now assumedfor p1 and analogously for the other perturbed quantities b1, v1 (and ρ1). It is alsoassumed that the equilibrium quantities are on the form b0 = b0
θ(r)θ + b0z(r)z and
p0 = p0(r) and η0 = η0(r) (and v0 = 0 as a reminder again). Then the equations(A.20) can be summarised (inviscid case ν = 0 and no resistivity in the equation ofstate) as a system of 6 coupled ODEs in the spatial variable r (in cylindrical geom-etry one of the magnetic field components can be safely eliminated). The equationsare straightforward to derive and found in [249] and [250]. Classic references forresistive MHD free boundary modes and (tokamak stability) eigenproblems include[251, 252]. Special care is needed for the choice of finite elements in numericalMHD [249, 248]. Otherwise the true spectrum will be “polluted”. Generic refer-ences for the finite element method (FEM) are e.g. [253, 254]. A good example ofa two-dimensional tokamak code is found in e.g. [255].
Using the Galerkin approach one can assemble the generalised algebraic eigen-value problem (GEVP)
Ax = λBx (A.21)
where the dimension of x is approximately 12N with N the number of grid intervals(if two basis elements are used for each grid point, as is promoted in e.g. [251]).The flexibility of FEMs conveniently allows grid packing to be used at resonancesand the edges to facilitate computational efficiency.

70 APPENDIX A. SUPPLEMENTARY MATERIAL
A.4 Derivation of the adjoint gradient in paper VI
To the best of the authors knowledge the following adjoint matrix gradient dif-ferentiation rules have not been published in other places. Inspiration for thisapproach came from a continuous-time calculation recently published as a tech-nique for smoothed spectral abscissa and H∞-optimisation [236]. This “technical”result has since been applied in a fixed-order continuous-time controller synthesispackage [256]. Note that the results here are not equivalent to those cited sincecontinuous-time and discrete-time Lyapunov equations are different (but there arerelations between them). A general reference for the matrix algebra below is e.g.[257].
The H2 norm of (a stable) DTLTI system (A, B, C, D) [210], denoted by ‖G‖2,can be computed algebraically as
‖G‖22 = trace
(DT D + BT QB
)= trace
(DDT + CP CT
)(A.22)
where the Gramians P = P T , Q = QT respectively solve the discrete-time Lya-punov equations
AP AT − P + BBT = 0 (A.23a)
AT QA − Q + CT C = 0 (A.23b)
A useful stochastic interpretation of the traced matrices in (A.22) goes as follows.Given a white input u(k) with identity covariance Eu(k)uT (k) = I then the outputcovariance is Ey(k)yT (k) = DDT + CP CT . Hence trace
(Ey(k)yT (k)
)= ‖G‖2
2 inthis case.
The optimisation expressions in paper [42] are based on the following matrixgradients
∂
∂A‖G‖2
2 = 2QAP (A.24a)
∂
∂B‖G‖2
2 = 2QB (A.24b)
∂
∂C‖G‖2
2 = 2CP (A.24c)
∂
∂D‖G‖2
2 = 2D (A.24d)
By introducing the affine system parameterisation
A(X) = A1 + ALXAR (A.25a)
B(X) = B1 + BLXBR (A.25b)
C(X) = C1 + CLXCR (A.25c)
D(X) = D1 + DLXDR (A.25d)

A.4. DERIVATION OF THE ADJOINT GRADIENT IN PAPER VI 71
and using chain-rule differentiation it follows that
12
∂
∂X‖G‖2
2 = ATLQAP AT
R + BTL QBBT
R
+CTL CP CT
R + DTLDDT
R (A.26)
in which dependencies such as P = P (X), Q = Q(X) have been omitted.To show the relation (A.24) first note that from (A.23) it is apparent that P does
not depend on C and Q does not depend on B, and neither P nor Q depends on D.By using the matrix differentiation rule (see e.g. [170]) ∂Etrace
(EMET
)= 2EM
for any M = MT , the second and third rows in (A.24) are obtained (the secondrow follows from a transposed application of the rule). The fourth row in (A.24)also follows from the same differentiation rule by setting M = I and E = D. Itremains (only) to evaluate the differentiation of ‖G‖2
2 with respect to A. Sincetrace
(DT D
)= trace
(DDT
)introduce
ρ = ‖G‖22 − trace
(DDT
)= trace
(CP CT
)= trace
(BT QB
)(A.27)
Then ∂A‖G‖22 = ∂Aρ, so it is sufficient to differentiate ρ. It is possible to recast the
Lyapunov equations (A.23) as a pair
Ap = fQ ≡ vec(BBT
)(A.28a)
AT q = fP ≡ vec(CT C
)(A.28b)
where vec (·) is the standard vectorisation operator (stacks columns on top of eachother). The vectors p = vec (P ) and q = vec (Q) are introduced. The calligraphicmatrix A is defined using a Kronecker product A = I − A ⊗ A. It turns out that italso holds2
ρ = fTP p = fT
Qq (A.29)
for the objective function ρ. Let a denote any matrix element of A so it follows
∂aρ = (∂pρ)T∂ap
= fTP
(∂aA−1
)fQ
= fTP
[−A−1 (∂aA) A−1
]fQ
= −qT (∂aA) p (A.30)
where standard matrix inverse differentiation (use 0 = ∂I = ∂(A−1A
)and solve
for ∂(A−1
)) and the vectorised Lyapunov equations (A.28) have been used. To
proceed first write out
∂aA = ∂a (I − A ⊗ A) = − (∂aA) ⊗ A − A ⊗ (∂aA) (A.31)
2From vectorisation algebra: trace(
BT QB)
= vec (B)T vec (QB) = vec (B)T(
BT ⊗ I)
q and[vec (B)T
(BT ⊗ I
)]T= (B ⊗ I) vec (B) = vec
(BBT
)= fQ. Hence ρ = f T
Qq. The equality is
similarly shown for f TP
p.

72 APPENDIX A. SUPPLEMENTARY MATERIAL
and specify the matrix element a with its indices p and q. Then ∂aA = ∂pqA = Epq
where Epq is a matrix with zeros everywhere except at location (p, q) where it hasa unit value. Using first basic vectorisation algebra and then resorting to indexcalculus it then follows3
(∂ρ
∂A
)
pq
= ∂pqρ = 2qT vec (AP Eqp)
= 2∑
l
qlp
∑
j
aljpjq = 2∑
l,j
qlpaljpjq
= 2∑
l,j
qplaljpjq = (2QAP )pq (A.32)
where it was explicitly used that P and Q are symmetric matrices. The notation(·)pq denotes the scalar matrix element at (p, q). This finally shows the first line inthe set of equations (A.24).
It is now straighforward to derive (A.26) using chain rule differentiation. Theindependent matrix variable is now X in (A.25). Below (p, q) refers to the matrixelement xpq. It can be shown that (∂pqA)
mn= aR
qnaLmp where aR are matrix
elements of AR and aL are matrix elements of AL. Analogous relations hold fordifferentiation of B, C with respect to X due to (A.25). It follows that
12
∂ρ
∂xpq
=∑
m,n
(QAP )mn aRqnaL
mp
+∑
m,n
(QB)mn bRqnbL
mp +∑
m,n
(CP )mn cRqncL
mp
=∑
m,n,i,j
aLT
pmqmjajipinaRT
nq
+∑
m,n,j
bLT
pmqmjbjnbRT
nq +∑
m,n,j
cLT
pmcmjpjncRT
nq (A.33)
which rewritten in matrix form is
12
∂ρ
∂X= AT
LQAP ATR + BT
L QBBTR + CT
L CP CTR (A.34)
so that (A.26) is obtained by also using ∂Xtrace(DDT
)= 2DT
LDDTR.
3Use (∂aA)p = −vec(
AP Eqp + EpqP AT)
from (A.31). Let M = AP Eqp. Now for any M
it holds that trace(
QT M)
= trace(
MT Q)
= trace(
QMT)
= trace(
QT MT)
since Q = QT .
Hence qT vec(
M + MT)
= trace(
QT M + QT MT)
= 2trace(
QT M)
= 2qT vec (M).

Appendix B
Toroidal geometry and(non-)axisymmetry
The purpose of this section is to provide a graphical represenation of the geometryof the standard RFP and tokamak MCF devices. Axisymmetry and nonaxisym-metry are defined. Toroidal and poloidal mode-numbers (m, n) are introduced andillustrated.
The standard toroidal configuration of MCF is illustated in figure B.1. Thisparticular case depicts a machine designed for confinement of plasmas with circularcross-sections. Also seen in figure B.1 are arrays of saddle coils similar to thoseused for the magnetic feedback studies in the thesis.
The toroidal angle φ is the periodic coordinate that traces out the major radius.The poloidal angle θ traces out the minor radius.
The q-value is illustrated in figure B.2. The difference between toroidal-field-dominated tokamak confinement and the RFP field lines is shown here.
“Axisymmetry” of some quantity here means that the quantity does not de-pend on the toroidal angle φ. “Nonaxisymmetry” here means that the quantitydoes depend on the toroidal angle φ. It is common to approximate the RFP (andsometimes also high-aspect ratio tokamaks) in a straight periodic dimension forthe toroidal direction with the coordinate z. Some straightened-out nonaxisym-metric perturbations are shown in figure B.3. These perturbations are graphicalrepresentations of the form exp (ιmθ + ιnφ). In the straight coordinate z this isinstead exp (ιmθ + ιkz) with the wavenumber k = n/R with R the major radius, sothat the periodicity in z is of length L = 2πR. The MHD equilibrium is typicallyassumed to be at least axisymmetric, and often not dependent on θ. This is notthe case for more recent studies on helical states in both RFPs and tokamaks. Andthe stellarator is designed to be nominally nonaxisymmetric.
73

74 APPENDIX B. TOROIDAL GEOMETRY AND (NON-)AXISYMMETRY
Figure B.1: Cut-out illustration of the vacuum vessel, resistive shell and coil arraytile of RFX-mod RFP (currently the most completely equipped MCF experimentfor magnetic feedback studies). RFX-mod has sensor and actuator saddle coil arraysof size 4 × 48, meaning there are 4 coils along the poloidal direction and 48 coilsalong the toroidal direction. T2R has a similar array but its actuator arrays is ofthe smaller size 4 × 32, even though the instability spectrum is wider for T2R.

75
Figure B.2: The upper toroidal configuration shows field lines for a tokamak-like|q| ≈ 4 situation. The lower toroidal ditto shows an RFP-like |q| ≈ 1/8 field linetrace.

76 APPENDIX B. TOROIDAL GEOMETRY AND (NON-)AXISYMMETRY
m=0
m=1
m=2
m=3
Figure B.3: A selection of nonaxisymmetric plasma-column perturbations (normal-mode expansion) with various toroidal mode-numbers n. The poloidal mode-number m ∈ {0, 1, 2, 3} is explicitly indicated in the figure.

Appendix C
Some (recurring) symbols andabbreviations
Glossary
ADC : analog to digital conversion
ARX : autoregressive exogenous
AT : advanced tokamak
CVA : canonical variate analysis
DAC : digital to analog conversion
DFT : discrete Fourier transform
DTLTI : discrete-time linear time-invariant
EF : error-field
ELM : edge-localised mode
EMA : experimental modal analysis
EVD : eigenvalue decomposition
FFT : fast Fourier transform
FIR : finite impulse response
GEVP : generalised eigenvalue problem
ICF : inertial confinement fusion
ITER : (formerly officially) international thermonuclear experimental reactor
77

78 APPENDIX C. SOME (RECURRING) SYMBOLS AND ABBREVIATIONS
ITM : integrated tokamak modelling
JET : joint european torus (the major MCF experiment)
LMI : linear matrix inequality
LTI : linear time-invariant
LQG : linear-quadratic-gaussian
MACC : multiply-accumulate instruction
MBOSS : “multibatch bootstrapped” SSARX method
MCF : magnetic confinement fusion
MHD : magnetohydrodynamics
MIMO : multiple-input multiple-output
MPC : model-predictive control
NTM : neoclassical tearing-mode
ODE : ordinary differential equation
OMA : operational modal analysis
PEM : prediction error method
PDE : partial differential equation
PID : proportional-integral-derivative
RFP : reversed-field pinch
RMS : root mean square
RWM : resistive-wall mode
SIM : subspace identification method
SISO : single-input single-output
SNR : signal to noise ratio
SSARX : “subspace-ARX” SIM method
SVD : singular value decomposition
TFTR : tokamak fusion test reactor (historical major MCF experiment)
TM : tearing-mode
VARX : vector ARX
ZOH : zero-order-hold

79
Symbols
C : complex numbers
E (·) : expectation operator (statistics)
ι : the imaginary unit (ι2 = −1)
R : real numbers
Journal & proceedings acronyms
These are used as a shorthand notation in subsection 5. The number suffix on theseacronyms, in subsection 5, indicates year of submission and/or publication.
cdc : A proceeding of the IEEE Conference on Decision and Control
fead : Fusion Engineering and Design (Elsevier)
msc : A proceeding of the IEEE Multi-Conference on Systems and Control
ifac : A proceeding of the IFAC (International Federation of Automatic Control)Symposium on System Identification
ppcf : Plasma Physics and Controlled Fusion (IOP Publishing)
tps : IEEE Transactions on Plasma Science


Bibliography
[1] Editorial. Climate of compromise. Nature, 461:1027–1028, 2009.
[2] United Nations Brundtland report. Our common future. Oxford UniversityPress, 1987.
[3] The Economist. Getting warmer - a special report on climate change and thecarbon economy. The Economist, December 5th, 2009.
[4] Johan Rockström et al. A safe operating space for humanity. Nature, 461:472–475, 2009.
[5] N. Stern. Stern review report on the economics of climate change. Technicalreport, HM Treasury, 2006. Executive Summary of Conclusions.
[6] Francis F. Chen. An Indispensable Truth - how fusion can save the planet.Springer Verlag, 2011.
[7] Jiangang Li, Jie Zhang, and Xuru Duan. Magnetic fusion development forglobal warming suppression. Nuclear Fusion, 50(1):014005 (5pp), 2010.
[8] Boris M. Andreev. Separation of hydrogen isotopes in H2O-H2S system.Separation Science and Technology, 36:1949–1989, 2001.
[9] David MacKay. Sustainable Energy - without the hot air. UIT CambridgeLtd., November 2008.
[10] Dale Meade. 50 years of fusion research. Nuclear Fusion, 50(1):014004 (14pp),2010.
[11] P.E. Stott. Introduction to tokamaks. JET-IR (89) 11, 1989.
[12] J. Wesson. Tokamaks. Number 118 in International Series of Monographs onPhysics. Oxford Science Publications, New York, 3rd edition, 2004.
[13] IOP. Fusion as en energy source - challenges and opportunities. Institute ofPhysics Reports, September 2008.
81

82 BIBLIOGRAPHY
[14] J. D. Strachan, H. Adler, P. Alling, C. Ancher, H. Anderson, J. L. Anderson,D. Ashcroft, Cris W. Barnes, G. Barnes, S. Batha, M. G. Bell, R. Bell,M. Bitter, W. Blanchard, N. L. Bretz, R. Budny, C. E. Bush, R. Camp,M. Caorlin, S. Cauffman, Z. Chang, C. Z. Cheng, J. Collins, G. Coward, D. S.Darrow, J. DeLooper, and H. Duong. Fusion power production from TFTRplasmas fueled with deuterium and tritium. Phys. Rev. Lett., 72(22):3526–3529, May 1994.
[15] R. J. Hawryluk. Results from deuterium-tritium tokamak confinement exper-iments. Rev. Mod. Phys., 70(2):537–587, Apr 1998.
[16] European fusion development agreement (EFDA) – joint european torus(JET) homepage, April 2012. http://www.efda.org/jet/.
[17] Kaname Ikeda. ITER on the road to fusion energy. Nuclear Fusion,50(1):014002 (10pp), 2010.
[18] International thermonuclear experimental reactor (ITER) website, April2012. http://www.iter.org.
[19] M S Chu and M Okabayashi. Stabilization of the external kink and theresistive wall mode. Plasma Physics and Controlled Fusion, 52(12):123001.
[20] P R Brunsell, H Bergsåker, M Cecconello, J R Drake, R M Gravestijn,A Hedqvist, and J-A Malmberg. Initial results from the rebuilt EXTRAPT2R RFP device. Plasma Physics and Controlled Fusion, 43(11):1457–1470,2001.
[21] Marco Cecconello. Experimental studies of confinement in EXTRAP T2 andT2R reversed field pinches. Doctoral thesis, KTH Electrical Engineering,Stockholm, Sweden, 2003.
[22] Yucai Zhu. Multivariable System Identification For Process Control. Elsevier,2001.
[23] D.S. Bernstein. A student’s guide to classical control. IEEE Control Systemsmagazine, 17(4):96–100, aug 1997.
[24] Dennis S. Bernstein. Feedback control: an invisible thread in the history oftechnology. IEEE Control systems magazine, 22(2):53–68, 2002.
[25] L. Frassinetti, K.E.J. Olofsson, P.R. Brunsell, and J.R. Drake. Resonantmagnetic perturbation effect on tearing mode dynamics. Nuclear Fusion,50(3):035005 (13pp), 2010.
[26] L. Frassinetti, K.E.J. Olofsson, P.R. Brunsell, and J.R. Drake. Imple-mentation of advanced feedback control algorithms for controlled resonantmagnetic perturbation physics studies on EXTRAP T2R. Nuclear Fusion,51(6):063018, 2011.

BIBLIOGRAPHY 83
[27] L. Frassinetti, S. Menmuir, M.W.M. Khan, K.E.J. Olofsson, P.R. Brunsell,and J.R. Drake. The effect of external control fields on tearing mode dy-namics. In 38th EPS Conference on Plasma Physics, pages P–4.076, July2011.
[28] M.W.M. Khan, P.R. Brunsell, L. Frassinetti, S. Menmuir, K.E.J. Olofsson,and J.R. Drake. Braking of plasma rotation by nonaxisymmetric magneticfields in EXTRAP T2R. In 38th EPS Conference on Plasma Physics, pagesP–2.084, July 2011.
[29] Erik Olofsson. Modelling and design for active control of magnetohydrody-namic unstable modes in EXTRAP T2R. Master’s thesis, Royal Institute ofTechnology (KTH), January 2007.
[30] K.E.J. Olofsson and P.R. Brunsell. Initial reference-spectrum resistive wallmode feedback control simulation and multivariable design. In 34th EPSConference on Plasma Physics, pages P–1.158, July 2007.
[31] E. Olofsson, E. Witrant, C. Briat, S.I. Niculescu, and P. Brunsell. Stabilityanalysis and model-based control in EXTRAP-T2R with time-delay compen-sation. Proceedings of the 47th IEEE Conference on Decision and Control(CDC), pages 2044 – 2049, December 2008.
[32] Erik Olofsson and Per Brunsell. Controlled magnetohydrodynamic mode sus-tainment in the reversed-field pinch: Theory, design and experiments. FusionEngineering and Design, 84(7-11):1455–1459, 2009.
[33] Erik Olofsson, Per Brunsell, and James Drake. Closed-loop direct parametricidentification of magnetohydrodynamic normal modes spectra in EXTRAP-T2R reversed-field pinch. Proceedings of the IEEE conference on ControlApplications (CCA) & Intelligent Control (ISIC) 2009, pages 1449–1454, July2009.
[34] Erik Olofsson, Håkan Hjalmarsson, Cristian R. Rojas, Per Brunsell, andJames R. Drake. Vector dither experiment design and direct parametricidentification of reversed-field pinch normal modes. Proceedings of the 48thIEEE Conference on Decision and Control and Chinese Control ConferenceCDC/CCC 2009, pages 1348 –1353, dec. 2009.
[35] Erik Olofsson, Cristian R. Rojas, Håkan Hjalmarsson, Per Brunsell, andJames R. Drake. Closed-loop MIMO ARX estimation of concurrent externalplasma response eigenmodes in magnetic confinement fusion. Proceedings ofthe 49th IEEE Conference on Decision and Control CDC, pages 2954–2959,dec. 2010.
[36] K.E.J. Olofsson and P.R. Brunsell. Closed-loop system identification and con-troller reconfiguration for EXTRAP T2R reversed-field pinch. IEEE Trans-actions on Plasma Science, 38(3):365 –370, March 2010.

84 BIBLIOGRAPHY
[37] K Erik J Olofsson, Per R Brunsell, Emmanuel Witrant, and James R Drake.Synthesis and operation of an FFT-decoupled fixed-order reversed-field pinchplasma control system based on identification data. Plasma Physics andControlled Fusion, 52(10):104005, 2010.
[38] Erik Olofsson. Closed-loop control and identification of resistive shell magne-tohydrodynamics for the reversed-field pinch. Technical Report TRITA-EE2010:019, Royal Institute of Technology (KTH), May 2010. Licentiate Thesisin Physical Electrotechnology.
[39] K Erik J Olofsson, Per R Brunsell, Cristian R Rojas, James R Drake, andHåkan Hjalmarsson. Predictor-based multivariable closed-loop system identi-fication of the EXTRAP T2R reversed field pinch external plasma response.Plasma Physics and Controlled Fusion, 53(8):084003, 2011.
[40] K. E. J. Olofsson, C. R. Rojas, H. Hjalmarsson, P. Brunsell, and J. R.Drake. Cascade and multibatch subspace system identification for multi-variate vacuum-plasma response characterisation. Proceedings of the 50thIEEE Conference on Decision and Control and European Control ConferenceCDC/ECC, pages 2614–2619, December 2011.
[41] K.E.J. Olofsson and C.R. Rojas. A practical approach to input design formodal analysis using subspace methods. In 16th IFAC Symposium on SystemIdentification, July 2012. to appear.
[42] K.E.J. Olofsson, P.R. Brunsell, J.R. Drake, and L. Frassinetti. A first attemptat few-coils and low-coverage RWM stabilisation of EXTRAP T2R. Plasmaphysics and Controlled Fusion, accepted February 2012. Special Issue onMHD Stability Control.
[43] Measurements of the vacuum-plasma response in EXTRAP T2R using genericclosed-loop subspace system identification. Fusion Engineering and Design.accepted April 2012.
[44] Jeffrey P. Freidberg. Plasma Physics and Fusion Energy. Cambridge Univer-sity Press (CUP), 2007.
[45] A.M. Bradshaw, T. Hamacher, and U. Fischer. Is nuclear fusion a sustainableenergy form? Fusion Engineering and Design, 86(9-11):2770–2773, 2011.
[46] Eric J. Lerner, S. Krupakar Murali, Derek Shannon, Aaron M. Blake, andFred Van Roessel. Fusion reactions from > 150 keV ions in a dense plasmafocus plasmoid. Physics of Plasmas, 19(3):032704, 2012.
[47] H.-S. Bosch and G.M. Hale. Improved formulas for fusion cross-sections andthermal reactivities. Nuclear Fusion, 32(4):611–31, 1992.

BIBLIOGRAPHY 85
[48] W. M. Nevins. A review of confinement requirements for advanced fuels.Journal of Fusion Energy, 17:25–32, 1998.
[49] J.D. Huba. Naval research laboratory - Plasma formularly. NRL/PU/6790-06-491, 2006 Revised.
[50] J D Lawson. Some criteria for a power producing thermonuclear reactor.Proceedings of the Physical Society. Section B, 70(1):6, 1957.
[51] IAEA. 50 years of magnetic confinement fusion research - a retrospective.Proceedings of the 22nd IAEA Fusion Energy Conference, November 2008.
[52] Wikipedia entry: Sim City 2000, October 2009.
[53] The Economist. The dream that failed - special report on nuclear energy.The Economist, March 10th, 2012.
[54] Lyman Spitzer. Physics of fully ionized gases. Interscience Publishers, 2edition, 1965.
[55] Richard D. Hazeltine and James D. Meiss. Plasma confinement. Number 86in Frontiers in Physics. Addison-Wesley, 1991.
[56] Allen H. Boozer. Physics of magnetically confined plasmas. Rev. Mod. Phys.,76(4):1071–1141, Jan 2005.
[57] Weston M. Stacey. Fusion plasma physics. Wiley-WCH, 2005.
[58] K. Miyamoto. Plasma physics and controlled nuclear fusion. Atomic, Optical,and Plasma Physics. Springer, 2005.
[59] D.B. Melrose and R.C. McPhedran. Electromagnetic processes in dispersivemedia. Cambridge University Press, 1991.
[60] R. Paul Drake. High-energy-density physics: fundamentals, inertial fusion,and experimental astrophysics. Shock wave and high pressure phenomena.Springer, 2006.
[61] S. H. Glenzer, B. J. MacGowan, P. Michel, N. B. Meezan, L. J. Suter, S. N.Dixit, J. L. Kline, G. A. Kyrala, D. K. Bradley, D. A. Callahan, E. L. Dewald,L. Divol, E. Dzenitis, M. J. Edwards, A. V. Hamza, C. A. Haynam, D. E.Hinkel, D. H. Kalantar, J. D. Kilkenny, O. L. Landen, J. D. Lindl, S. LePape,J. D. Moody, A. Nikroo, T. Parham, M. B. Schneider, R. P. J. Town, P. Weg-ner, K. Widmann, P. Whitman, B. K. F. Young, B. Van Wonterghem, L. J.Atherton, and E. I. Moses. Symmetric Inertial Confinement Fusion Implosionsat Ultra-High Laser Energies. Science, page science.1185634, 2010.

86 BIBLIOGRAPHY
[62] N.J. Peacock, D.C. Robinson, M.J. Forrest, P.D. Wilcock, and V.V. Sannikov.Measurement of the electron temperature by thomson scattering in tokamakT3. Nature, 224(5218):488–490, November 1969.
[63] V.P. Smirnov. Tokamak foundation in USSR/Russia 1950-1990. NuclearFusion, 50(1):014003 (8pp), 2010.
[64] T. C. Luce. Realizing steady-state tokamak operation for fusion energy.Physics of Plasmas, 18(3):030501, 2011.
[65] Max-planck institut für plasmaphysik Wendelstein 7-X website, December2009.
[66] M. Shimada, D.J. Campbell, V. Mukhovatov, M. Fujiwara, N. Kirneva,K. Lackner, M. Nagami, V.D. Pustovitov, N. Uckan, J. Wesley, N. Asakura,A.E. Costley, A.J.H. Donné, E.J. Doyle, A. Fasoli, C. Gormezano, Y. Gribov,O. Gruber, T.C. Hender, W. Houlberg, S. Ide, Y. Kamada, A. Leonard,B. Lipschultz, A. Loarte, K. Miyamoto, V. Mukhovatov, T.H. Osborne,A. Polevoi, and A.C.C. Sips. Chapter 1: Overview and summary. NuclearFusion, 47(6):S1, 2007.
[67] H.A.B. Bodin and A.A. Newton. Reversed-field-pinch research. Nuclear fu-sion, 20(10):1255–1324, 1980.
[68] J. B. Taylor. Relaxation of toroidal plasma and generation of reverse magneticfields. Physical Review Letters, 33, 1974.
[69] J. B. Taylor. Relaxation and magnetic reconnection in plasmas. Rev. Mod.Phys., 58(3):741–763, Jul 1986.
[70] Sergio Ortolani and Dalton D. Schnack. Magnetohydrodynamics of plasmarelaxation. World Scientific Publishing Co. Pte. Ltd., 1993.
[71] D. D. Schnack, D. C. Barnes, Z. Mikic, D. S. Harned, E. J. Caramana, andR. A. Nebel. Numerical simulation of reversed-field pinch dynamics. Com-puter Physics Communications, 43(1):17–28, 1986.
[72] H. A. B. Bodin. Evolution of the RFP. Plasma Physics and ControlledFusion, 30(14):2021, 1988.
[73] H. A. B. Bodin. The reversed field pinch. Nuclear Fusion, 30(9):1717, 1990.
[74] F. Najmabadi, R.W. Conn, et al. The TITAN reversed field pinch fusionreactor study - the final report. Technical Report UCLA-PPG-1200, UCLAReport, 1990.
[75] C.M. Bishop. Pattern recognition and machine learning. Information Scienceand Statistics. Springer, 2006.

BIBLIOGRAPHY 87
[76] C.M. Bishop. An intelligent shell for the toroidal pinch. Plasma Physics andControlled Fusion, 31(7):1179–1189, 1989.
[77] C.G. Gimblett. On free boundary instabilities induced by a resistive wall.Nuclear Fusion, 26(5):617.
[78] T.C. Hender, C.G. Gimblett, and D.C. Robinson. Effects of a resistive wallon magnetohydrodynamic instabilities. Nuclear Fusion, 29(8):1279, 1989.
[79] B Alper, M K Bevir, H A B Bodin, C A Bunting, P G Carolan, J Cunnane,D E Evans, C G Gimblett, R J Hayden, T C Hender, A Lazaros, R W Moses,A A Newton, P G Noonan, R Paccagnella, A Patel, H Y W Tsui, and P DWilcock. RFP stability with a resistive shell in HBTX1C. Plasma Physicsand Controlled Fusion, 31(2):205, 1989.
[80] B. Alper. A review of results from the HBTX reversed field pinch. Physicsof Fluids B: Plasma Physics, 2(6):1338–1341, 1990.
[81] R. Fitzpatrick and E. P. Yu. Feedback stabilization of resistive shell modesin a reversed field pinch. Physics of Plasmas, 6(9):3536–3547, 1999.
[82] R. Paccagnella, D. Gregoratto, and A. Bondeson. Feedback control of resistivewall modes in reversed field pinches. Nuclear Fusion, 42(9):1102–1109, 2002.
[83] P R Brunsell, D Yadikin, D Gregoratto, R Paccagnella, Y Q Liu, T Bol-zonella, M Cecconello, J R Drake, M Kuldkepp, G Manduchi, G Marchiori,L Marrelli, P Martin, S Menmuir, S Ortolani, E Rachlew, G Spizzo, andP Zanca. Active control of multiple resistive wall modes. Plasma Physics andControlled Fusion, 47(12B):B25, 2005.
[84] P. R. Brunsell, D. Yadikin, D. Gregoratto, R. Paccagnella, T. Bolzonella,M. Cavinato, M. Cecconello, J.R. Drake, A. Luchetta, G. Manduchi, G. Mar-chiori, L. Marrelli, P. Martin, A. Masiello, F. Milani, S. Ortolani, G. Spizzo,and P. Zanca. Feedback stabilization of multiple resistive wall modes. PhysicalReview Letters, 93(22):225001, 2004.
[85] D. Yadikin. Resistive wall mode stability and control in the reversed-fieldpinch. Doctoral thesis, KTH Electrical Engineering, Stockholm, Sweden,2006.
[86] G. Chitarin, S. Dal Bello, L. Grando, and S. Peruzzo. The design of 192saddle coils for RFX. Fusion Engineering and Design.
[87] Sergio Ortolani and the RFX team. Active MHD control experiments inRFX-mod. Plasma Physics and Controlled Fusion, 48(12B):B371, 2006.

88 BIBLIOGRAPHY
[88] R. Paccagnella, S. Ortolani, P. Zanca, A. Alfier, T. Bolzonella, L. Marrelli,M. E. Puiatti, G. Serianni, D. Terranova, M. Valisa, M. Agostini, L. Apolloni,F. Auriemma, F. Bonomo, A. Canton, L. Carraro, R. Cavazzana, M. Cav-inato, P. Franz, E. Gazza, L. Grando, P. Innocente, R. Lorenzini, A. Luchetta,G. Manduchi, G. Marchiori, S. Martini, R. Pasqualotto, P. Piovesan, N. Po-maro, P. Scarin, G. Spizzo, M. Spolaore, C. Taliercio, N. Vianello, B. Zaniol,L. Zanotto, and M. Zuin. Active-feedback control of the magnetic boundaryfor magnetohydrodynamic stabilization of a fusion plasma. Phys. Rev. Lett.,97:075001, Aug 2006.
[89] Paolo Zanca, Lionello Marrelli, Gabriele Manduchi, and Giuseppe Marchiori.Beyond the intelligent shell concept: the clean-mode-control. Nuclear Fusion,47(11):1425–1436, 2007.
[90] G. Marchiori and A. Soppelsa. Development and validation of an electromag-netic model of the active control system of MHD modes in RFX-mod. FusionEngineering and Design, 82(5-14):1015–1022, 2007.
[91] Anton Soppelsa. Aspects of electromagnetic modelling for multiple-inputmultiple-output control of MHD modes in RFX-mod. Doctoral thesis, Uni-versity of Padova, Padova, Italy, 2008.
[92] V Igochine, T Bolzonella, S C Guo, D Yadikin, M Baruzzo, and H Zohm.Externally induced rotation of the resistive wall modes in RFX-mod. PlasmaPhysics and Controlled Fusion, 51(5):055008, 2009.
[93] Piero Martin. Lessons from the RFP on magnetic feedback control of plasmastability. Fusion Science and Technology, 59(3):602–616, April 2011.
[94] James Robert Drake, T. Bolzonella, Erik Olofsson, T. M. Baruzzo, Per Brun-sell, Lorenzo Frassinetti, S. C. Guo, V. Igochine, Y. Q. Liu, G. Marchiori,R. Paccagnella, G. Rubinacci, A. Soppelsa, F. Villone, D. Yadikin, P. Mar-tin, and H. Zohm. Reversed-field pinch contributions to resistive wall modephysics and control. In IAEA-F1-CN-165, pages Paper EXP/P9–7–, 2008.NQC.
[95] Z. R. Wang, S. C. Guo, L. Shi, T. Bolzonella, M. Baruzzo, and X. G. Wang.Comparison between cylindrical model and experimental observation on thestudy of resistive wall mode in reversed field pinch plasmas. Physics of Plas-mas, 17(5):052501, 2010.
[96] Z.R. Wang and S.C. Guo. Physical understanding of the instability spec-trum and the feedback control of resistive wall modes in reversed field pinch.Nuclear Fusion, 51(5):053004, 2011.
[97] D Yadykin, Y Q Liu, and R Paccagnella. Effects of kinetic resonances on thestability of resistive wall modes in reversed field pinch. Plasma Physics andControlled Fusion, 53(8):085024, 2011.

BIBLIOGRAPHY 89
[98] G. Marchiori, M. Baruzzo, T. Bolzonella, Y.Q. Liu, A. Soppelsa, and F. Vil-lone. Dynamic simulator of RWM control for fusion devices: modelling andexperimental validation on RFX-mod. Nuclear Fusion, 52(2):023020, 2012.
[99] John M. Finn. Control of magnetohydrodynamic modes with a resistive wallabove the wall stabilization limit. Physics of Plasmas, 13(8):082504, 2006.
[100] A. S. Richardson, J. M. Finn, and G. L. Delzanno. Control of ideal and re-sistive magnetohydrodynamic modes in reversed field pinches with a resistivewall. Physics of Plasmas, 17(11):112511, 2010.
[101] R. Lorenzini et al. Self-organized helical equilibria as a new paradigm forohmically heated fusion plasmas. Nature Physics, 5:570–574, 2009.
[102] P. Piovesan, M. Zuin, A. Alfier, D. Bonfiglio, F. Bonomo, A. Canton, S. Cap-pello, L. Carraro, R. Cavazzana, D.F. Escande, A. Fassina, M. Gobbin,R. Lorenzini, L. Marrelli, P. Martin, E. Martines, R. Pasqualotto, M.E.Puiatti, M. Spolaore, M. Valisa, N. Vianello, P. Zanca, and the RFX-modTeam. Magnetic order and confinement improvement in high-current regimesof RFX-mod with MHD feedback control. Nuclear Fusion, 49(8):085036, 2009.
[103] G. Ambrosino, M. Ariola, G. De Tommasi, A. Pironti, and A. Portone. Designof the plasma position and shape control in the ITER tokamak using in-vesselcoils. IEEE Transactions on Plasma Science, 37(7):1324 –1331, july 2009.
[104] Marco Ariola and Alfredo Pironti. Magnetic control of tokamak plasmas.Advances in Industrial Control. Springer-Verlag London Ltd., 2008.
[105] Alfredo Pironti, Michael Walker, et al. Control of tokamak plasmas: produc-ing energy from nuclear fusion. IEEE Control System Magazine, 25(5):24–90,October 2005.
[106] Alfredo Pironti, Michael Walker, et al. Control of tokamak plasmas - part 2.IEEE Control System Magazine, 26(2):30–91, April 2006.
[107] A. Coutlis, D.J.N. Limebeer, J.P. Wainwright, J.B. Lister, and P. Vyas. Fre-quency response identification of the dynamics of a tokamak plasma. IEEETransactions on Control Systems Technology, 8(4):646–659, July 2000.
[108] D. Mazon, J. Blum, C. Boulbe, B. Faugeras, A. Boboc, M. Brix, P. De Vries,S. Sharapov, and L. Zabeo. Real-time identification of the current densityprofile in the JET tokamak: method and validation. In Proceedings of the48th IEEE Conference on Decision and Control (CDC/CCC) 2009, pages285–290, dec. 2009.
[109] Y. Ou, T.C. Luce, E. Schuster, J.R. Ferron, M.L. Walker, C. Xu, and D.A.Humphreys. Towards model-based current profile control at DIII-D. FusionEngineering and Design, 82(5-14):1153–1160, 2007.

90 BIBLIOGRAPHY
[110] E. Witrant, E. Joffrin, S. Bremond, G. Giruzzi, D. Mazon, O. Barana, andP. Moreau. A control-oriented model of the current profile in tokamak plasma.Plasma Physics and Controlled Fusion, 49(7):1075, 2007.
[111] F. Felici, O. Sauter, S. Coda, B.P. Duval, T.P. Goodman, J-M. Moret, J.I.Paley, and the TCV Team. Real-time physics-model-based simulation of thecurrent density profile in tokamak plasmas. Nuclear Fusion, 51(8):083052,2011.
[112] D. Moreau, D. Mazon, M.L. Walker, J.R. Ferron, K.H. Burrell, S.M. Flana-gan, P. Gohil, R.J. Groebner, A.W. Hyatt, R.J. La Haye, J. Lohr, F. Turco,E. Schuster, Y. Ou, C. Xu, Y. Takase, Y. Sakamoto, S. Ide, T. Suzuki,ITPA-IOS group members, and experts. Plasma models for real-time controlof advanced tokamak scenarios. Nuclear Fusion, 51(6):063009, 2011.
[113] J.F. Artaud, V. Basiuk, F. Imbeaux, M. Schneider, J. Garcia, G. Giruzzi,P. Huynh, T. Aniel, F. Albajar, J.M. Ané, A. Bécoulet, C. Bourdelle,A. Casati, L. Colas, J. Decker, R. Dumont, L.G. Eriksson, X. Garbet, R. Guir-let, P. Hertout, G.T. Hoang, W. Houlberg, G. Huysmans, E. Joffrin, S.H.Kim, F. Köchl, J. Lister, X. Litaudon, P. Maget, R. Masset, B. Pégourié,Y. Peysson, P. Thomas, E. Tsitrone, and F. Turco. The CRONOS suite ofcodes for integrated tokamak modelling. Nuclear Fusion, 50(4):043001, 2010.
[114] Federico Alberto Alfredo Felici. Real-time control of tokamak plasmas: fromcontrol of physics to physics-based control. Doctoral thesis, EPFL Ecole Poly-technique federale de Lausanne, Lausanne, Switzerland, 2011.
[115] Eugenio Schuster, Miroslav Krstić, and George Tynan. Nonlinear Lyapunov-based burn control in fusion reactors. Fusion Engineering and Design, 63-64:569–575, 2002.
[116] R. J. Buttery, A. H. Boozer, Y. Q. Liu, J.-K. Park, N. M. Ferraro,V. Amoskov, Y. Gribov, R. J. La Haye, E. Lamzin, J. E. Menard, M. J.Schaffer, E. J. Strait, and the DIII-D Team. The limits and challenges oferror field correction for ITER. Physics of Plasmas, 19(5):056111, 2012.
[117] A. Bondeson and H. X. Xie. Stability of ideal and resistive modes in cylin-drical plasmas with resistive walls and plasma rotation. Physics of Plasmas,4(6):2081–2089, 1997.
[118] Y. Q. Liu and A. Bondeson. Active feedback stabilization of toroidal externalmodes in tokamaks. Phys. Rev. Lett., 84:907–910, Jan 2000.
[119] Y. Q. Liu, A. Bondeson, C. M. Fransson, B. Lennartson, and C. Breitholtz.Feedback stabilization of nonaxisymmetric resistive wall modes in tokamaks.i. electromagnetic model. Physics of Plasmas, 7(9):3681–3690, 2000.

BIBLIOGRAPHY 91
[120] C. M. Fransson, B. Lennartson, C. Breitholtz, A. Bondeson, and Y. Q. Liu.Feedback stabilization of nonaxisymmetric resistive wall modes in tokamaks.ii. control analysis. Physics of Plasmas, 7(10):4143–4151, 2000.
[121] A. Bondeson, Y. Q. Liu, D. Gregoratto, C. M. Fransson, B. Lennartson,C. Breitholtz, Y. Gribov, and V. D. Pustovitov. Physics and control of resis-tive wall modes. Physics of Plasmas, 9(5):2044–2050, 2002.
[122] O. Katsuro-Hopkins, S.A. Sabbagh, and J.M. Bialek. Analysis of resistivewall mode LQG control in NSTX with mode rotation. In Proceedings of the48th IEEE Conference on Decision and Control (CDC/CCC), pages 309–314,dec. 2009.
[123] C. M. Fransson. Optimization Methods for Robust Control with Applicationto Resistive Wall Modes in Tokamaks. PhD thesis, Chalmers University ofTechnology (CTH), 2003.
[124] Aaron C. Sontag, S. A. Sabbagh, W. Zhu, J. M. Bialek, J. E. Menard, D. A.Gates, A. H. Glasser, R. E. Bell, B. P. LeBlanc, M. G. Bell, A. Bondeson, J. D.Callen, M. S. Chu, C. C. Hegna, S. M. Kaye, L. L. Lao, Y. Liu, R. Maingi,D. Mueller, K. C. Shaing, D. Stutman, and K. Tritz. Resistive wall modestabilization of high-beta plasmas in the national spherical torus experiment.Physics of Plasmas, 12(5):056112, 2005.
[125] Y. In et al. Model-based dynamic resistive wall mode identification and feed-back control in the DIII-D tokamak. Physics of Plasmas, 13(6):062512, 2006.
[126] H. Reimerdes et al. Cross-machine comparison of resonant field amplificationand resistive wall mode stabilization by plasma rotation. Physics of Plasmas,13(5):056107, 2006.
[127] M. Shilov et al. Dynamical plasma response of resistive wall modes to chang-ing external magnetic perturbations. Physics of Plasmas, 11(5):2573–2579,2004.
[128] J. W. Berkery, S. A. Sabbagh, R. Betti, B. Hu, R. E. Bell, S. P. Gerhardt,J. Manickam, and K. Tritz. Resistive wall mode instability at intermediateplasma rotation. Phys. Rev. Lett., 104(3):035003, Jan 2010.
[129] Yueqiang Liu, M S Chu, W F Guo, F Villone, R Albanese, G Ambrosino,M Baruzzo, T Bolzonella, I T Chapman, A M Garofalo, C G Gimblett,R J Hastie, T C Hender, G L Jackson, R J La Haye, M J Lanctot, Y In,G Marchiori, M Okabayashi, R Paccagnella, M Furno Palumbo, A Pironti,H Reimerdes, G Rubinacci, A Soppelsa, E J Strait, S Ventre, and D Yadykin.Resistive wall mode control code maturity: progress and specific examples.Plasma Physics and Controlled Fusion, 52(10):104002, 2010.

92 BIBLIOGRAPHY
[130] A Portone, F Villone, Y Liu, R Albanese, and G Rubinacci. Linearly per-turbed MHD equilibria and 3D eddy current coupling via the control surfacemethod. Plasma Physics and Controlled Fusion, 50(8):085004 (12pp), 2008.
[131] L. Guazzotto, J. P. Freidberg, and R. Betti. A general formulation of mag-netohydrodynamic stability including flow and a resistive wall. Physics ofPlasmas, 15(7):072503, 2008.
[132] E. Strumberger, S. Günter, P. Merkel, S. Riondato, E. Schwarz, C. Tichmann,and H.P. Zehrfeld. Numerical MHD stability studies: toroidal rotation, vis-cosity, resistive walls and current holes. Nuclear Fusion, 45(9):1156, 2005.
[133] C.C. Petty, T.E. Evans, J.C. DeBoo, B. Hudson, R.J. La Haye, T.C. Luce,P.A. Politzer, S.L. Allen, E.J. Doyle, M.E. Fenstermacher, J.R. Ferron, A.W.Hyatt, R.J. Jayakumar, R.A. Moyer, and T.H. Osborne. Observation of ELMsuppression in hybrid discharges using n = 3 magnetic perturbations on DIII-D. Nuclear Fusion, 50(2):022002 (6pp), 2010.
[134] J P Graves, I T Chapman, S Coda, M Lennholm, M Albergante, andM Jucker. Control of magnetohydrodynamic stability by phase space en-gineering of energetic ions in tokamak plasmas. Nature Communications,3:624, 2012.
[135] Gert Witvoet. Feedback control and injection locking of the sawtooth oscilla-tion in fusion plasmas. Doctoral thesis, Eindhoven Technische Universiteit,Eindhoven, The Netherlands, December 2011.
[136] J. Dalessio, E. Schuster, D.A. Humphreys, M.L. Walker, Y. In, and J.S. Kim.Robust control of resistive wall modes in tokamak plasmas using µ-synthesis.In 17th IFAC World Congress, July 2008.
[137] M Sempf, P Merkel, E Strumberger, C Tichmann, and S Günter. Robustcontrol of resistive wall modes using pseudospectra. New Journal of Physics,11(5):053015, 2009.
[138] Z. Sun, A. K. Sen, and R. W. Longman. Adaptive optimal stochastic statefeedback control of resistive wall modes in tokamaks. Physics of Plasmas,13(1):012512, 2006.
[139] Z. Sun and A.K. Sen. Neural network control of resistive wall modes in toka-maks. IEEE Transactions on Plasma Science, 38(11):3226–3233, November2010.
[140] J M Hanson, H Reimerdes, M J Lanctot, Y In, R J La Haye, G L Jackson,G A Navratil, M Okabayashi, P E Sieck, and E J Strait. Feedback controlof the proximity to marginal RWM stability using active MHD spectroscopy.Nuclear Fusion, 52(1):013003, 2012.

BIBLIOGRAPHY 93
[141] J P Goedbloed, H A Holties, S Poedts, G T A Huysmans, and W Kerner.MHD spectroscopy: free boundary modes (ELMs) and external excitation ofTAE modes. Plasma Physics and Controlled Fusion, 35(SB):B277, 1993.
[142] A Fasoli, D Testa, S Sharapov, H L Berk, B Breizman, A Gondhalekar, R FHeeter, M Mantsinen, and contributors to the EFDA-JET Workprogramme.MHD spectroscopy. Plasma Physics and Controlled Fusion, 44(12B):B159,2002.
[143] J.X. Rossel, J.-M. Moret, Y. Martin, and G. Pochon. Physics design of asaddle coil system for TCV. Fusion Engineering and Design, 86(12):2843–2864, 2011.
[144] W. Treutterer, K. Behler, A. Buhler, R. Cole, L. Giannone, A. Kagarmanov,K. Lüddecke, G. Neu, G. Raupp, M.Reich, D. Zasche, and T. Zehetbauer.Integrated operation of diagnostic and control systems. Fusion Engineeringand Design, 86(6-8):465–470, 2011.
[145] G. C. Goodwin and R. L. Payne. Dynamic system identification: experimentdesign and data analysis. Academic Press, 1977.
[146] T. Söderström and P. Stoica. System identification. Prentice Hall, 1989.
[147] Lennart Ljung. System Identification - theory for the user. Prentice-Hall, 2ndedition, 1999.
[148] Toby S. Cubitt, Jens Eisert, and Michael M. Wolf. Extracting dynamicalequations from experimental data is NP hard. Phys. Rev. Lett., 108:120503,Mar 2012.
[149] L. Ljung. Perspectives on system identification. In IFAC World Congress,2008.
[150] Curtis R. Vogel. Computational Methods for Inverse Problems. SIAM, 2002.
[151] Gianluigi Pillonetto and Giuseppe De Nicolao. A new kernel-based approachfor linear system identification. Automatica, 46(1):81–93, 2010.
[152] Tianshi Chen, Henrik Ohlsson, and Lennart Ljung. On the estimation oftransfer functions, regularizations and gaussian processes - revisited. In 18thIFAC World Congress, September 2011.
[153] Henrik Ohlsson. Regularization for Sparseness and Smoothness - Applica-tions in System Identification and Signal Processing. Doctoral thesis, LiTHLinköping Technical University, Linköping, Sweden, 2010.
[154] Trevor Hastie, Robert Tibshirani, and Jerome Friedman. The elements ofstatistical learning: data mining, inference, and prediction. Springer series instatistics. Springer, 2nd edition, 2009.

94 BIBLIOGRAPHY
[155] Brian D. O. Anderson and John B. Moore. Optimal filtering. Informationand systems sciences. Prentice-Hall, 1979.
[156] Mats Viberg, Bo Wahlberg, and Björn Ottersten. Analysis of state spacesystem identification methods based on instrumental variables and subspacefitting. Automatica, 33(9):1603–1616, 1997.
[157] S. Joe Qin. An overview of subspace identification. Computers and ChemicalEngineering, 30:1502–1513, 2006.
[158] Tohru Katayama. Subspace Methods for System Identification. Communica-tions and Control Engineering. Springer-Verlag, 1st edition, 2005.
[159] D. Di Ruscio. Closed and open loop subspace system identification of theKalman filter. Modeling, Identification and Control, 30(2):71–86, 2009.
[160] Gabriele Pannocchia and Mirco Calosi. A predictor form PARSIMoniousalgorithm for closed-loop subspace identification. Journal of Process Control,20(4):517–524, 2010.
[161] Bo Wahlberg, Magnus Jansson, Ted Matsko, and Mats Molander. Experi-ences from subspace system identification - comments from process indus-try users and researchers. In Alessandro Chiuso, Stefano Pinzoni, and Au-gusto Ferrante, editors, Modeling, Estimation and Control, volume 364 ofLecture Notes in Control and Information Sciences, pages 315–327. SpringerBerlin/Heidelberg, 2007.
[162] Weilu Lin, S.J. Qin, and L. Ljung. On consistency of closed-loop subspaceidentification with innovation estimation. In 43rd IEEE Conference on Deci-sion and Control (CDC), volume 2, pages 2195–2200, dec. 2004.
[163] Magnus Jansson. On Subspace Methods in System Identification and SensorArray Signal Processing. PhD thesis, October 1997. TRITA-S3-REG-9701.
[164] Anders Dahlén. Identification of stochastic systems : Subspace methods andcovariance extension. PhD thesis, KTH Royal Institute of Technology, 2001.
[165] A. Benveniste, M. Basseville, and L. Mevel. Convergence rates for eigen-structure identification using subspace methods. In Proceedings of the 39thIEEE Conference on Decision and Control (CDC), volume 2, pages 1550–1554, 2000.
[166] Michèle Basseville, Albert Benveniste, Maurice Goursat, Luc Hermans, Lau-rent Mevel, and Herman Van der Auweraer. Output-only subspace-basedstructural identification: From theory to industrial testing practice. Journalof Dynamic Systems, Measurement, and Control, 123(4):668–676, 2001.

BIBLIOGRAPHY 95
[167] A. Benveniste and L. Mevel. Nonstationary consistency of subspace methods.IEEE Transactions on Automatic Control, 52(6):974–984, june 2007.
[168] Bradley Efron and Robert Tibshirani. Improvements on cross-validation: The.632+ bootstrap method. Journal of the American Statistical Association,92(438):pp. 548–560, 1997.
[169] N.G. Van Kampen. Stochastic Processes in Physics and Chemistry. Elsevier,3rd edition, 2007.
[170] Robert F. Stengel. Optimal control and estimation. Dover Publications, 1994.
[171] Robert Grover Brown and Patrick Y.C. Hwang. Introduction to random sig-nals and applied kalman filtering. John-Wiley & Sons, Inc., 2nd edition, 1992.
[172] Rudolf E. Kalman. A new approach to linear filtering and prediction prob-lems. Journal of Basic engineering, 82:35–45, 1960.
[173] M. Jansson. Subspace identification and ARX modeling. In IFAC Symposiumon System Identification, Aug 2003.
[174] J.N. Juang. Applied system identification. Prentice Hall, 1994.
[175] Wallace E. Larimore. System identification, reduced-order filtering and mod-eling via canonical variate analysis. In American Control Conference (ACC),pages 445–451, June 1983.
[176] S James Press. Applied multivariate analysis. Dover Publications, 2nd edition,1982 (2005).
[177] B. Moore. Principal component analysis in linear systems: Controllability,observability, and model reduction. IEEE Transactions on Automatic Con-trol, 26(1):17 – 32, feb 1981.
[178] Alessandro Chiuso. The role of vector autoregressive modeling in predictor-based subspace identification. Automatica, 43:1034–1048, 2007.
[179] A. Chiuso. On the asymptotic properties of closed-loop CCA-type subspacealgorithms: Equivalence results and role of the future horizon. IEEE Trans-actions on Automatic Control, 55(3):634 –649, March 2010.
[180] Henrik Jansson. Experiment design with applications in identification forcontrol. PhD thesis, Royal Institute of Technology (KTH), dec 2004. TRITA-S3-REG-0404.
[181] Kristian Lindqvist. On experiment design in identification of smooth linearsystems. Technical Report TRITA-S3-REG-0103, Royal Institute of Technol-ogy (KTH), June 2001. Licentiate Thesis.

96 BIBLIOGRAPHY
[182] Märta Barenthin-Syberg. Complexity Issues, Validation and Input Design forControl in System Identification. PhD thesis, Royal Institute of Technology(KTH), December 2008. TRITA-EE-2008:055.
[183] Christian A. Larsson. Toward applications oriented optimal input design withfocus on model predictive control. Technical Report TRITA-EE 2011:056,Royal Institute of Technology (KTH), September 2011. Licentiate Thesis.
[184] Gene F. Franklin, J. David Powell, and Michael L. Workman. Digital Controlof Dynamic Systems. Prentice-Hall, 3rd edition, 1997.
[185] W.H. Press, S.A. Teukolsky, W.T. Vetterling, and B.P. Flannery. NumericalRecipes in C++. Cambridge University Press, 2nd edition, 2002.
[186] S. K. Park and K. W. Miller. Random number generators: good ones arehard to find. Commun. ACM, 31(10):1192–1201, 1988.
[187] A. H. Sayed and T. Kailath. A survey of spectral factorization methods.Numerical Linear Algebra with Applications, 8(6-7):467–496, 2001.
[188] Mathworks Inc., September 2011.
[189] Carsten Scherer and Siep Weiland. Linear matrix inequalities in control.Technical report, Delft Center for Systems and Control, Delft University ofTechnology, and Department of Electrical Engineering, Eindhoven Universityof Technology, The Netherlands, 2004. (Lecture Notes).
[190] Sigurd Skogestad and Ian Postlethwaite. Multivariable Feedback Control -analysis and design. Wiley, 2nd edition, 2005.
[191] M. Cavinato and G. Marchiori. Design of the new RFX equilibrium activecontrol system. Fusion Engineering and Design, 74(1-4):567–572, 2005.
[192] Cristian R. Rojas, James S. Welsh, Graham C. Goodwin, and Arie Feuer.Robust optimal experiment design for system identification. Automatica,43(6):993– 1008, 2007.
[193] Urban Forssell and Lennart Ljung. Closed-loop identification revisited. Au-tomatica, 35:1215–1241, july 1999.
[194] Maia, Silva, He, Lieven, Lin, Skingle, and Urgueira. Theoretical and experi-mental modal analysis. Research Studies Press Ltd. and John Wiley & Sons,1997.
[195] H. Van der Auweraer and B. Peeters. Discriminating physical poles frommathematical poles in high order systems: use and automation of the sta-bilization diagram. In Proceedings of the 21st IEEE Instrumentation andMeasurement Technology Conference (IMTC), volume 3, pages 2193 – 2198,May 2004.

BIBLIOGRAPHY 97
[196] Maurice Goursat, Michael Döhler, and Laurent Mevel Palle Andersen. Crystalclear SSI for operational modal analysis of aerospace vehicles. In 28th Inter-national Modal Analysis Conference - IMAC-XXVIII, JacksonVille, UnitedStates, February 2010.
[197] G. Ivan and B. de Moor. Subspace identification combined with new modeselection techniques for modal analysis of an airplane. In IFAC Symposiumon System Identification, Aug 2003.
[198] E. Peter Carden and James M. W. Brownjohn. Fuzzy clustering of stabilitydiagrams for vibration-based structural health monitoring. Computer-AidedCivil and Infrastructure Engineering, 23(5).
[199] Palle Andersen, Rune Brincker, Maurice Goursat, and Laurent Mevel. Au-tomated modal parameter estimation for operational modal analysis of largesystems. In Rune Brincker and Nis Møller, editors, Proceedings of the 2nd In-ternational Operational Modal Analysis Conference, volume 1, pages 299–308,2007.
[200] Gregory R. Werner and John R. Cary. Extracting degenerate modes andfrequencies from time-domain simulations with filter-diagonalization. Journalof Computational Physics, 227(10):5200–5214, 2008.
[201] Vladimir A. Mandelshtam. Harmonic inversion of time cross-correlation func-tions: The optimal way to perform quantum or semiclassical dynamics calcu-lations. The Journal of Chemical Physics, 108(24):9999–10007, 1998.
[202] W. A. Strauss. Partial Differential Equations. John Wiley & Sons, Inc., 1992.
[203] Bradley Efron and Gail Gong. A leisurely look at the bootstrap, the jackknife,and cross-validation. The American Statistician, 37(1), February.
[204] Gunnar Englund. Datorintensiva metoder i matematisk statistik. Technicalreport, Kungliga Tekniska Högskolan (KTH) - avdelningen för matematiskstatistik, 2004. Föreläsningsanteckningar.
[205] Sergio Bittanti and Marco Lovera. Bootstrap-based estimates of uncertaintyin subspace identification methods. Automatica, 36(11):1605–1615, 2000.
[206] T. Samad and A.M. Annaswamy (eds.). The impact of control technology.Technical report, IEEE Control Systems Society (CSS), 2011.
[207] Karl Johan Åstrom and Richard M. Murray. Feedback systems: an introduc-tion for scientists and engineers. Princeton University Press, 2008.
[208] Torkel Glad and Lennart Ljung. Reglerteori: flervariabla och olinjärametoder. Studentlitteratur, 2003.

98 BIBLIOGRAPHY
[209] Michael Green and David J.N. Limebeer. Linear robust control. Pearson,1994.
[210] K. Zhou, J.C. Doyle, and K. Glover. Robust and optimal control. PrenticeHall, 1996.
[211] J.C. Maxwell. On governors. Proceedings of the Royal Society, 16:270–283,1867.
[212] Enid R. Pinch. Optimal control and the calculus of variations. Oxford Uni-versity Press (OUP), 1993.
[213] G. Stein. Respect the unstable. IEEE Control systems magazine, 23(4):12–25,2003.
[214] Biao Huang and Ramesh Kadali. Dynamic Modeling, Predictive Control andPerformance Monitoring: A Data-driven Subspace Approach, volume 374 ofLecture Notes in Control and Information Sciences. Springer-Verlag, 1st edi-tion, 2008.
[215] Hyo-Sung Ahn, Kevin L. Moore, and Yang-Quan Chen. Iterative LearningControl: Robustness and Monotonic Convergence for Interval Systems. Com-munications and Control Engineering. Springer-Verlag, 1st edition, 2007.
[216] J.G. Ziegler and N.B. Nichols. Optimum settings for automatic controllers.Transactions of the ASME, November 1942.
[217] S. Bennett. A history of control engineering, 1930-1955. IEE control engi-neering series.
[218] Norbert Wiener. Cybernetics, or Control and Communication in the Animaland the Machine. The Technology Press, Cambridge, Mass., John Wiley &Sons Inc., New York, 1948.
[219] A.L. Fradkov. Cybernetical physics: from control of chaos to quantum control.Understanding complex systems. Springer, 2007.
[220] Alexander Fradkov. Exploring nonlinearity by feedback. Phys. D, 128:159–168, April 1999.
[221] Edward Ott, Celso Grebogi, and James A. Yorke. Controlling chaos. Phys.Rev. Lett., 64:1196–1199, Mar 1990.
[222] K. Pyragas. Continuous control of chaos by self-controlling feedback. PhysicsLetters A, 70(6):421–428, 1992.
[223] F. Chandra, D.F. Gayme, L. Chen, and J.C. Doyle. Robustness, optimization,and architectures. European Journal of Control, 17:472–482, December 2011.

BIBLIOGRAPHY 99
[224] Torsten Söderström. Errors-in-variables methods in system identification.Automatica, 43(6):939 – 958, 2007.
[225] D. Merlin, S. Ortolani, R. Paccagnella, and M. Scapin. Linear resistive mag-netohydrodynamic stability analysis of reversed-field pinch configurations atfinite beta. Nuclear Fusion, 29, 1989.
[226] Donghui Liu. Computational studies of MHD stability for RFPs and toka-maks. PhD thesis, Chalmers University of Technology (CTH), 1999.
[227] Piero Martin. Feedback control in magnetic nuclear fusion. Europhysics News,42(6):40–44, 2011.
[228] J S deGrassie. Tokamak rotation sources, transport and sinks. Plasma Physicsand Controlled Fusion, 51(12):124047, 2009.
[229] Richard Fitzpatrick, Enrico Rossi, and Edmund P. Yu. Improved evolu-tion equations for magnetic island chains in toroidal pinch plasmas subjectto externally applied resonant magnetic perturbations. Physics of Plasmas,8(10):4489–4500, 2001.
[230] W Michiels and S-I Niculescu. Stability and Stabilization of Time-Delay Sys-tems: An Eigenvalue-Based Approach, volume 12 of Advances in Design andControl. SIAM, 2007.
[231] A. Packard and J. Doyle. The complex structured singular value. Automatica,29(1):71–109, 1993.
[232] Michael Karow. µ-values and spectral value sets for linear perturbation classesdefined by a scalar product. SIAM Journal on Matrix Analysis and Applica-tions, 32(3):845–865, 2011.
[233] C M Bishop, J W Connor, R J Hastie, and S C Cowley. On the difficulty ofdetermining tearing mode stability. Plasma Physics and Controlled Fusion,33(4):389, 1991.
[234] L.N. Trefethen, A.E. Trefethen, S.C. Reddy, and T.A. Driscoll. Hydrody-namic stability without eigenvalues. Science, 261(5121):578–584, July 1993.
[235] D. Borba, K. S. Riedel, W. Kerner, G. T. A. Huysmans, M. Ottaviani, andP. J. Schmid. The pseudospectrum of the resistive magnetohydrodynam-ics operator: Resolving the resistive Alfvén paradox. Physics of Plasmas,1(10):3151–3160, 1994.
[236] Joris Vanbiervliet, Bart Vandereycken, Wim Michiels, Stefan Vandewalle, andMoritz Diehl. The smoothed spectral abscissa for robust stability optimiza-tion. SIAM Journal on Optimization, 20(1):156–171, 2009.

100 BIBLIOGRAPHY
[237] Carl Edward Rasmussen and Christopher K. I. Williams. Gaussian Processesfor Machine Learning. The MIT Press, 2006.
[238] N. Hovakimyan, Cao Chengyu, E. Kharisov, E. Xargay, and I.M. Gregory. L1
adaptive control for safety-critical systems. IEEE Control Systems Magazine,31(5):54–104, October 2011.
[239] Mihailo Jovanović and Bassam Bamieh. The spatio-temporal impulse re-sponse of the linearized Navier-Stokes equations. Proceedings of the AmericanControl Conference (ACC), 3:1948–1953, June 2001.
[240] Onofrio Semeraro. Feedback control and modal structures in transitionalshear flows. Technical Report TRITA-MEK 2011:01, KTH Royal Institute ofTechnology, February 2011. Licentiate Thesis in Mechanics.
[241] Antonios Monokrousos. Optimisation and control of shear flows. Doctoralthesis in mechanics, KTH Royal Institute of Technology, Stockholm, Sweden,May 2011.
[242] Bassam Bamieh, F. Paganini, and M.A. Dahleh. Distributed control ofspatially invariant systems. IEEE Transactions on Automatic Control,47(7):1091–1107, jul 2002.
[243] Lennart Råde and Bertil Westergren. Mathematics Handbook for Science andEngineering. Studentlitteratur, 5th edition, 2004.
[244] Glenn Bateman. MHD instabilitites. MIT Press, 1978.
[245] Dieter Biskamp. Nonlinear magnetohydrodynamics. Cambridge universitypress, 1993.
[246] P.A. Davidson. An Introduction to Magnetohydrodynamics. Cambridge Uni-versity Press, 2001.
[247] Hans Goedbloed and Stefaan Poedts. Principles of Magnetohydrodynamics.Cambridge University Press, 1st edition, 2004.
[248] Hans Goedbloed, Rony Keppens, and Stefaan Poedts. Advanced Magnetohy-drodynamics. Cambridge University Press, 1st edition, 2010.
[249] Ralf Gruber and Jacques Rappaz. Finite element methods in linear idealmagnetohydrodynamics. Springer Series in Computational Physics. Springer-Verlag, 1985.
[250] W. Kerner, K. Lerbinger, R. Gruber, and T. Tsunematsu. Normal modeanalysis for resistive cylindrical plasmas. Computer Physics Communications,36:225–240, 1985.

BIBLIOGRAPHY 101
[251] W Kerner. Large-scale complex eigenvalue problems. Journal of Computa-tional Physics, 85(1):1–85, 1989.
[252] G. T. A. Huysmans, J. P. Goedbloed, and W. Kerner. Free boundary resistivemodes in tokamaks. Physics of Fluids B: Plasma Physics, 5(5):1545–1558,1993.
[253] Stig Larsson and Vidar Thomée. Partial Differential Equations with Numer-ical Methods. Number 45 in Texts in Applied Mathematics (TAM). Springer-Verlag, 2003.
[254] O. Axelsson and V.A. Barker. Finite element solution of boundary valueproblems. Academic Press, 1984.
[255] W Kerner, J.P Goedbloed, G.T.A Huysmans, S Poedts, and E Schwarz. CAS-TOR: Normal-mode analysis of resistive MHD plasmas. Journal of Compu-tational Physics, 142(2):271–303, 1998.
[256] D. Arzelier, G. Deaconu, S. Gumussoy, and D. Henrion. H2 for HIFOO.International Conference on Control and Optimization with Industrial Appli-cations, August 2011.
[257] Jan R. Magnus and Heinz Neudecker. Matrix differential calculus with ap-plications in statistics and econometrics. John Wiley & Sons, 3rd edition,2007.








![The International Thermonuclear Experimental …physics/0401110v3 [physics.soc-ph] 2 Feb 2004 ITER: The International Thermonuclear Experimental Reactor and the Nuclear Weapons Proliferation](https://img.pdfslide.net/doc/110x75/5b0413897f8b9a41528bf036/the-international-thermonuclear-experimental-physics0401110v3-physicssoc-ph.jpg)