Embed Size (px)
Citation preview

Savoir une chose sur chaque chose!Helmi TOUEL, Edition 2016 ©
NOTIONS AERONAUTIQUES
CH 03-01: Moteurs Brushless
V0103/04/2016
http://aeromodelisme.eklablog.net

2For information only
1. Introduction
CH 03-01: Brushless
2. Moteur Brushless 3. Fonctionnement 4. L'ESC 5. Annexes
Ceci n’est pas un cours académique et ne peut pas servir en tant que tel.
Ceci est une approche simplifiée d’une discipline regroupant plusieurs branches: aérodynamique, mécanique du vol, aéromodélisme, etc.
Certains résultats découlent d’une modélisation donnée (hypothèses). Généraliser les résultats en dehors de leur cadre peut conduire à des
interprétations erronées.
Certaines assertions reflètent l’interprétation de l’auteur. Le lecteur doit prendre du recul et les soumettre à son sens critique.
AVERTISSEMENT
Vos remarques serons très appréciées: [email protected]
3For information only
1. Introduction
CH 03-01: Brushless
2. Moteur Brushless 3. Fonctionnement 4. L'ESC 5. Annexes
Sommaire:
•Introduction
•Moteur Brushless
•Principe de Fonctionnement
•Contrôleur / ESC
•Annexes
4For information only
1. Introduction
CH 03-01: Brushless
2. Moteur Brushless 3. Fonctionnement 4. L'ESC 5. Annexes
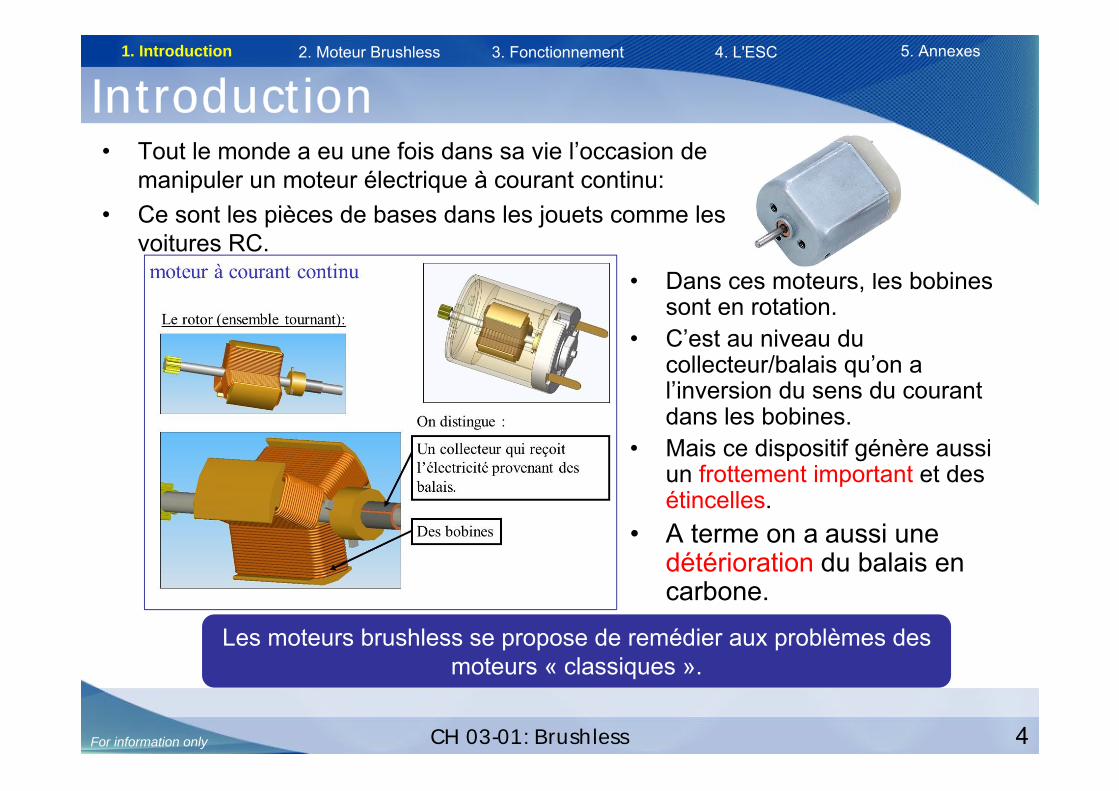
Introduction• Tout le monde a eu une fois dans sa vie l’occasion de
manipuler un moteur électrique à courant continu:
• Ce sont les pièces de bases dans les jouets comme les voitures RC.
• Dans ces moteurs, les bobines sont en rotation.
• C’est au niveau du collecteur/balais qu’on a l’inversion du sens du courant dans les bobines.
• Mais ce dispositif génère aussi un frottement important et des étincelles.
• A terme on a aussi une détérioration du balais en carbone.
Les moteurs brushless se propose de remédier aux problèmes des moteurs « classiques ».
5For information only
2. Moteur Brushless
CH 03-01: Brushless
1. Introduction 3. Fonctionnement 4. L'ESC 5. Annexes
Sommaire:
•Introduction
•Moteur Brushless
•Principe de Fonctionnement
•Contrôleur / ESC
•Annexes
6For information only
2. Moteur Brushless
CH 03-01: Brushless
1. Introduction 3. Fonctionnement 4. L'ESC 5. Annexes
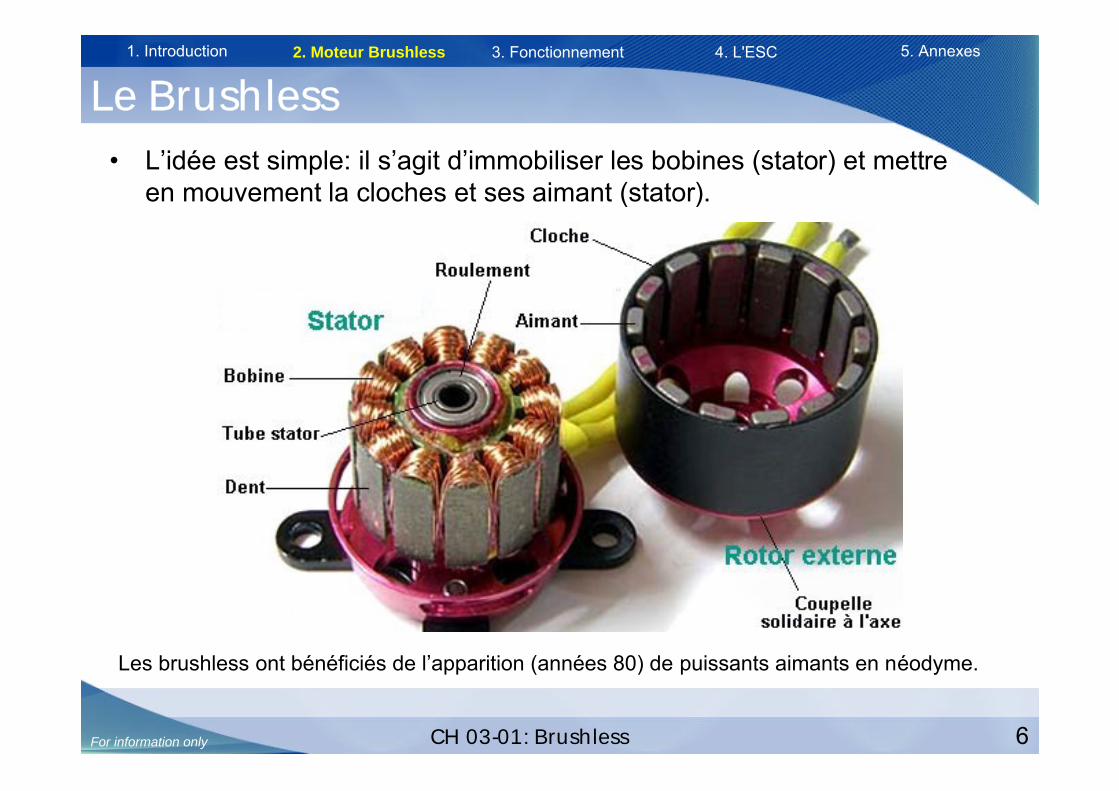
Le Brushless• L’idée est simple: il s’agit d’immobiliser les bobines (stator) et mettre
en mouvement la cloches et ses aimant (stator).
Les brushless ont bénéficiés de l’apparition (années 80) de puissants aimants en néodyme.
7For information only
2. Moteur Brushless
CH 03-01: Brushless
1. Introduction 3. Fonctionnement 4. L'ESC 5. Annexes
Aimant Néodyme
• dd
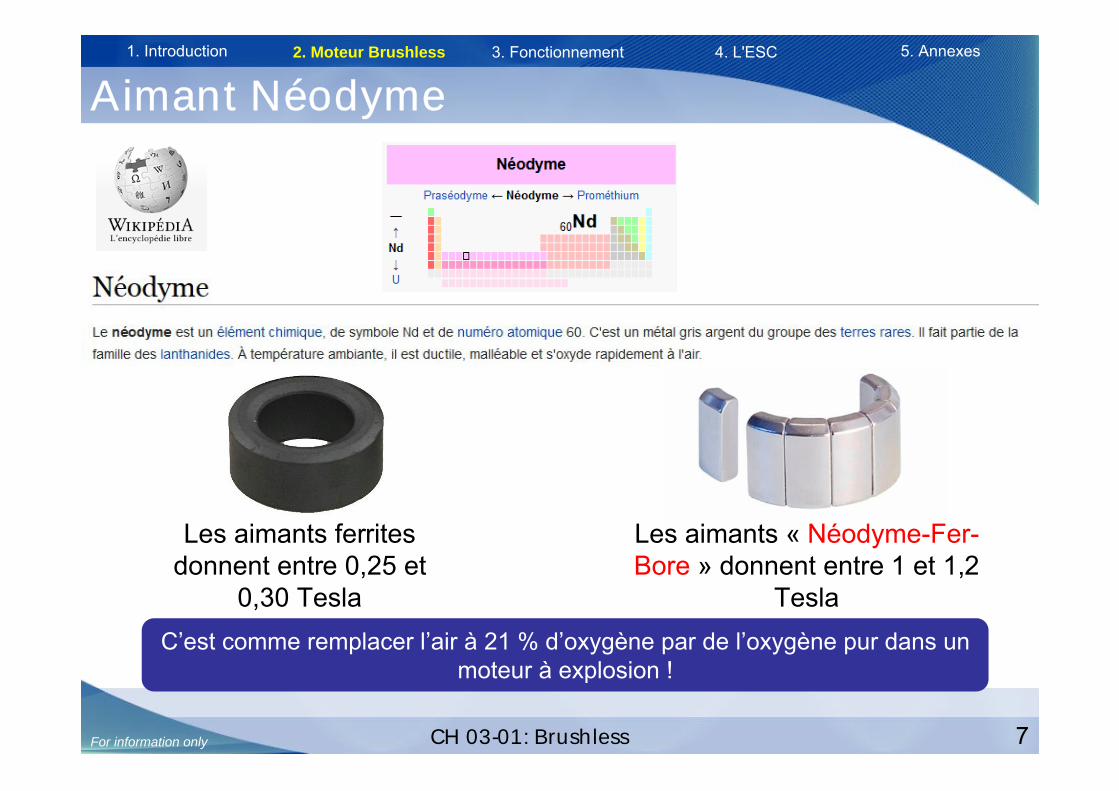
C’est comme remplacer l’air à 21 % d’oxygène par de l’oxygène pur dans un moteur à explosion !
Les aimants « Néodyme-Fer-Bore » donnent entre 1 et 1,2
Tesla
Les aimants ferrites donnent entre 0,25 et
0,30 Tesla

8For information only
2. Moteur Brushless
CH 03-01: Brushless
1. Introduction 3. Fonctionnement 4. L'ESC 5. Annexes
Types de moteurs• On distingue les Outrunners et les Inrunners:
Rotor
On peut mettre beaucoup d’aimants et leur bras de levier est important: couple
important/ Kv (vitesse) faible-> pas besoin de réducteur.
Les aimants (2 pôles) sont dans l’axe (rotor). Les bobines (extérieur) forme le
stator. Moins coupleux mais il tourne plus vite-> besoin d’un réducteur. Plus facile à
Controller.
Rotor
9For information only
3. Fonctionnement
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 4. L'ESC 5. Annexes
Sommaire:
•Introduction
•Moteur Brushless
•Principe de Fonctionnement
•Contrôleur / ESC
•Annexes
10For information only
3. Fonctionnement
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 4. L'ESC 5. Annexes
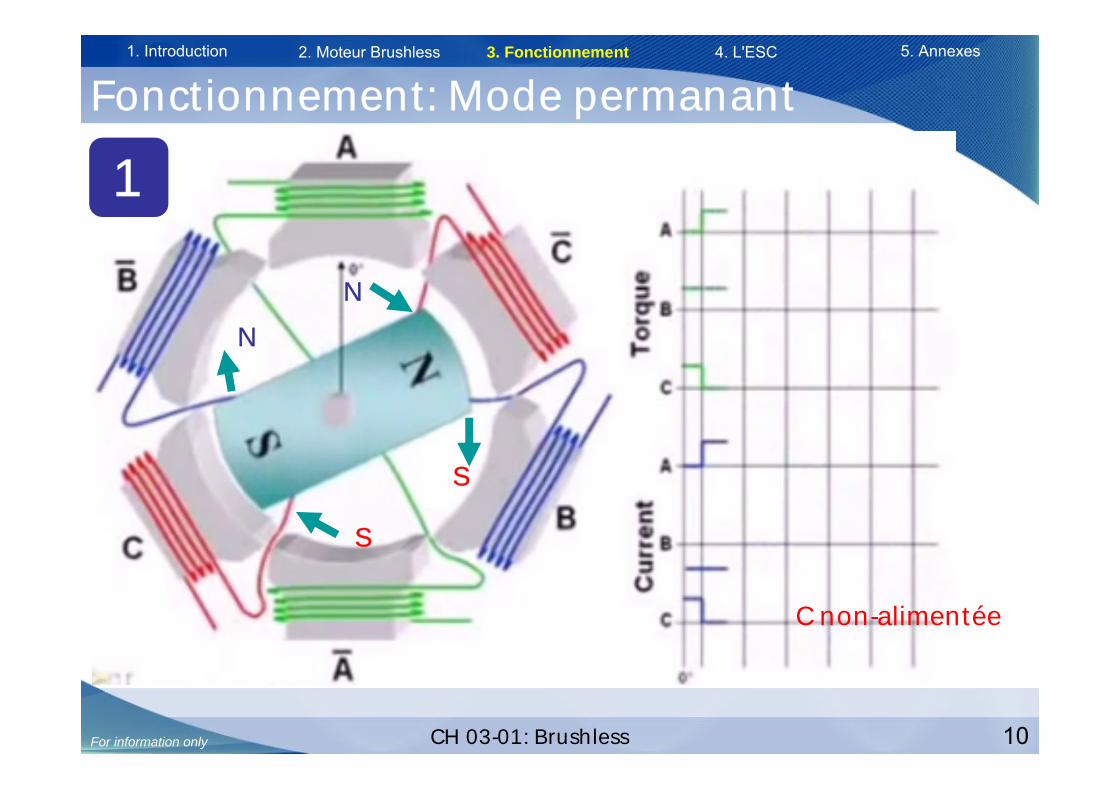
Fonctionnement: Mode permanant
S
S
N
N
C non-alimentée
1
11For information only
3. Fonctionnement
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 4. L'ESC 5. Annexes
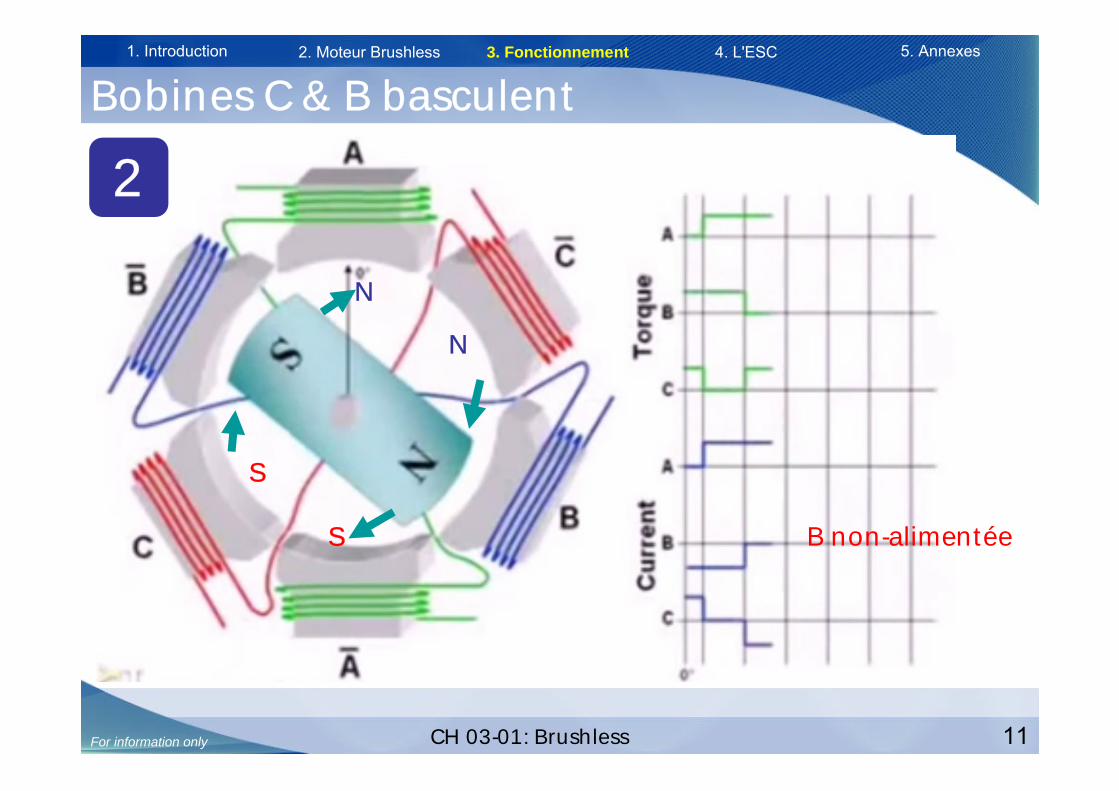
Bobines C & B basculent
B non-alimentée
S
S
N
N
2
12For information only
3. Fonctionnement
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 4. L'ESC 5. Annexes
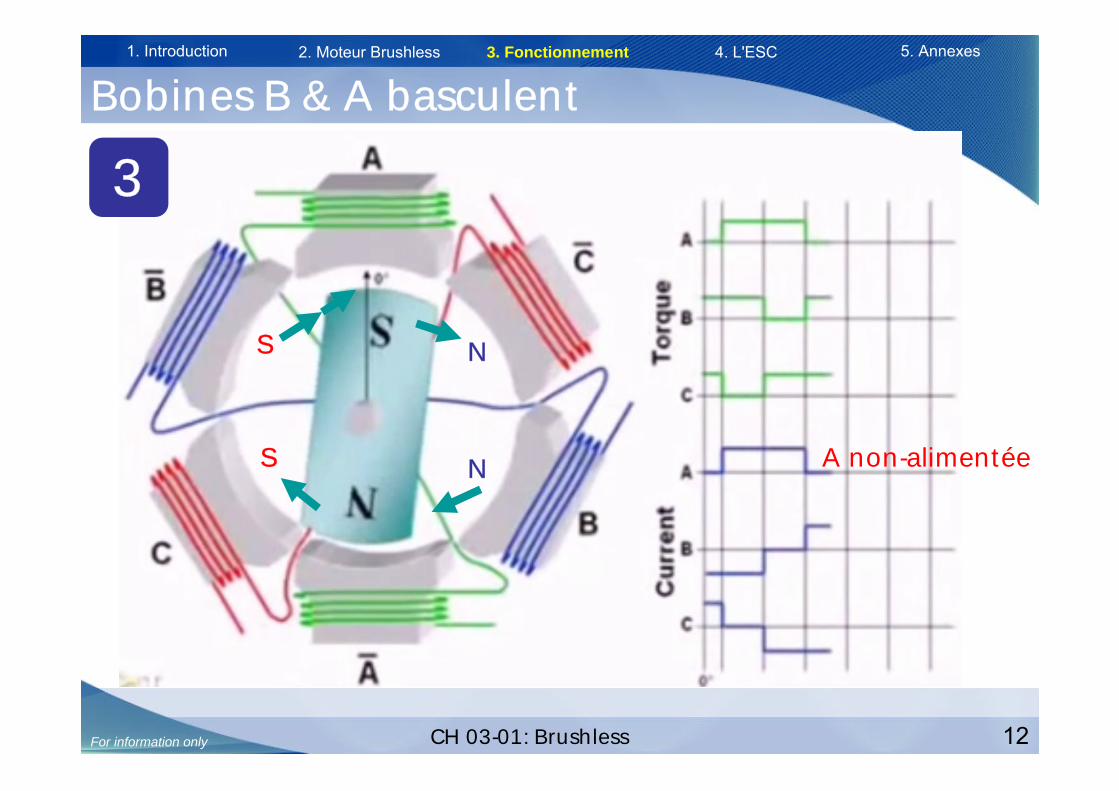
Bobines B & A basculent
A non-alimentée
NS
S N
3
13For information only
3. Fonctionnement
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 4. L'ESC 5. Annexes
L’Asservissement
• Dans le moteur brushless le champ magnétique tourne pour « tirer » les rotors. Plus le nombre de pôles (rotor) est importants, plus la vitesse du champ est importante (par rapport à la vitesse réelle du moteur)
• Tant que le couple moteur est supérieur à la charge à entraîner, la rotation du rotor est synchronisée avec le champ magnétique.
• Si le couple résistant devient supérieur au couple moteur, et que la tension d’alimentation n’est pas ajustée en conséquence, il y a un risque de décrochage, c'est-à-dire que le rotor risque de ne plus suivre le champ magnétique.
• A partir de ce moment là, le rotor va se mettre à osciller, sans pouvoir se resynchroniser avec le champ magnétique, ce qui peut provoquer sa destruction.
• Pour éviter cela, le système d’asservissement doit être en mesure de réagir si le couple résistant augmente, et ajuster la tension d’alimentation en conséquence.
L’asservissement du moteur est assurer par un contrôleur.
14For information only
4. L'ESC
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 5. Annexes
Sommaire:
•Introduction
•Moteur Brushless
•Principe de Fonctionnement
•Contrôleur / ESC
•Annexes
15For information only
4. L'ESC
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 5. Annexes
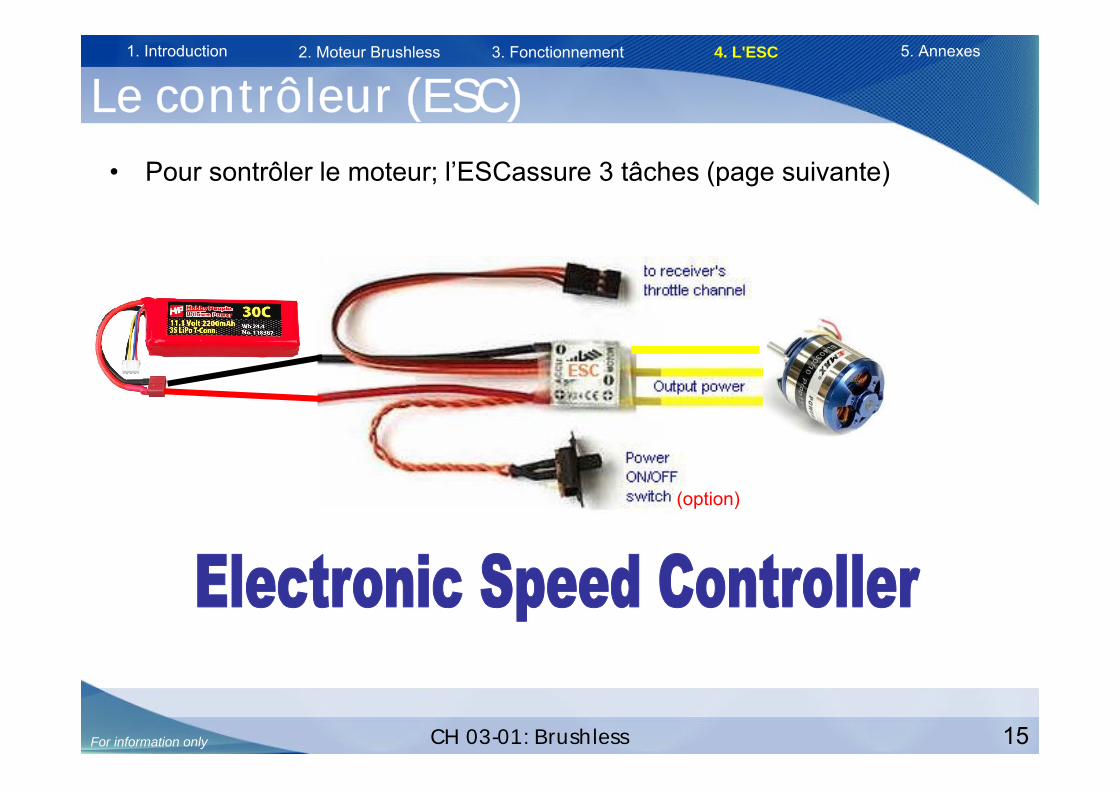
Le contrôleur (ESC)
• Pour sontrôler le moteur; l’ESCassure 3 tâches (page suivante)
(option)
16For information only
4. L'ESC
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 5. Annexes
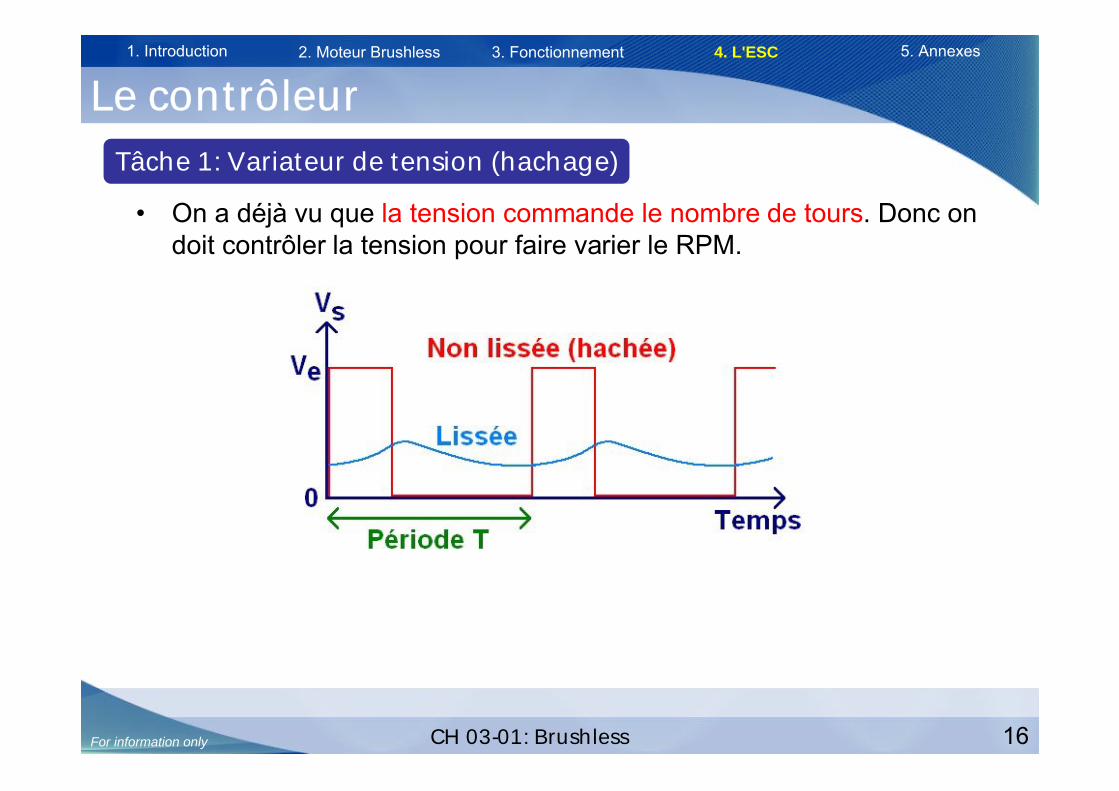
Le contrôleurTâche 1: Variateur de tension (hachage)
• On a déjà vu que la tension commande le nombre de tours. Donc on doit contrôler la tension pour faire varier le RPM.
17For information only
4. L'ESC
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 5. Annexes
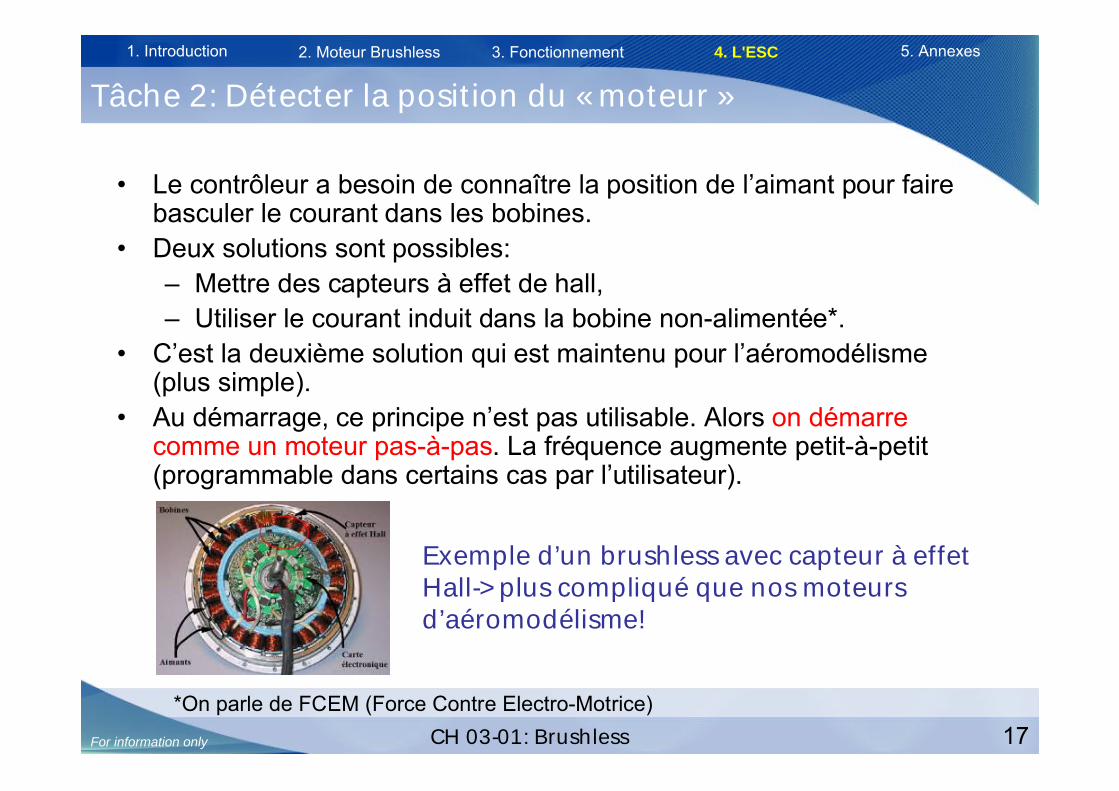
Tâche 2: Détecter la position du « moteur »
• Le contrôleur a besoin de connaître la position de l’aimant pour faire basculer le courant dans les bobines.
• Deux solutions sont possibles:– Mettre des capteurs à effet de hall,– Utiliser le courant induit dans la bobine non-alimentée*.
• C’est la deuxième solution qui est maintenu pour l’aéromodélisme (plus simple).
• Au démarrage, ce principe n’est pas utilisable. Alors on démarre comme un moteur pas-à-pas. La fréquence augmente petit-à-petit (programmable dans certains cas par l’utilisateur).
*On parle de FCEM (Force Contre Electro-Motrice)
Exemple d’un brushless avec capteur à effet Hall-> plus compliqué que nos moteurs d’aéromodélisme!
18For information only
4. L'ESC
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 5. Annexes
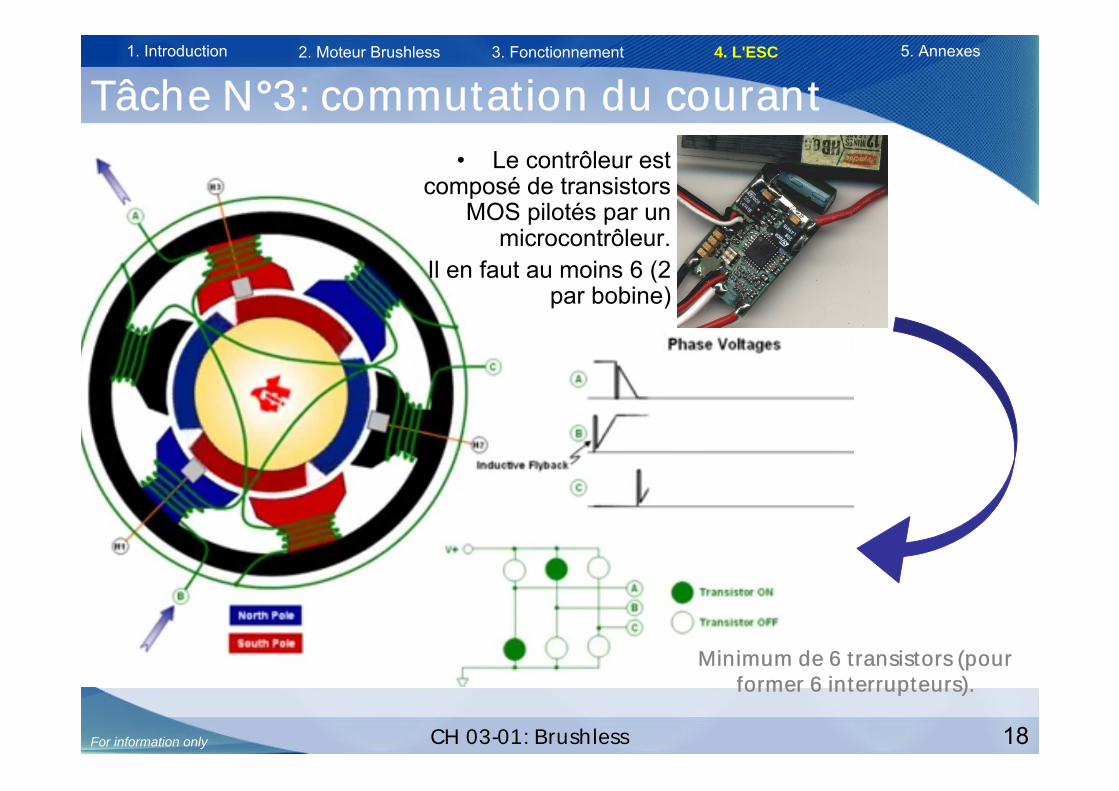
Tâche N°3: commutation du courant• Le contrôleur est
composé de transistors MOS pilotés par un
microcontrôleur.• Il en faut au moins 6 (2
par bobine)
Minimum de 6 transistors (pour former 6 interrupteurs).
19For information only
4. L'ESC
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 5. Annexes
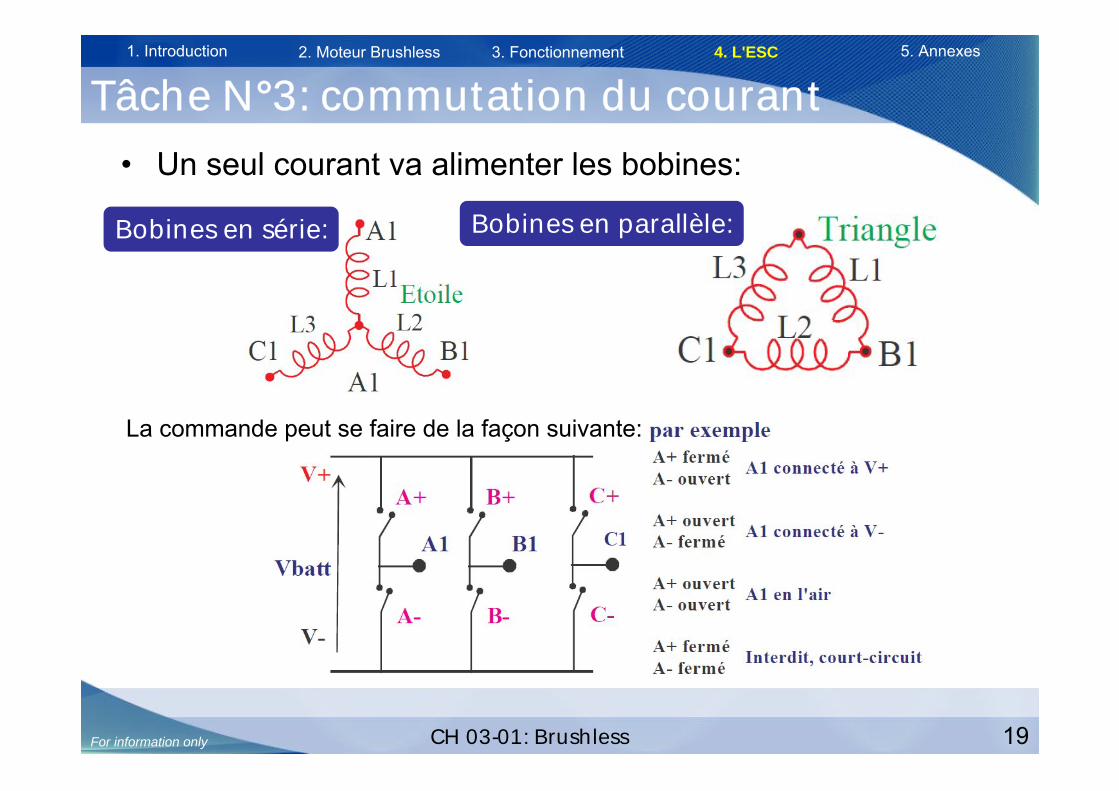
Tâche N°3: commutation du courant
• Un seul courant va alimenter les bobines:
Bobines en série: Bobines en parallèle:
La commande peut se faire de la façon suivante:
20For information only
5. Annexes
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 4. L'ESC
Sommaire:
•Introduction
•Moteur Brushless
•Principe de Fonctionnement
•Contrôleur / ESC
•Annexes
21For information only
5. Annexes
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 4. L'ESC
Le Timing• Le temps de commutation (entre le moment ou le moteur détecte la
position « zéro » de l’aimant et le moment ou il fait la bascule de la bobine) est noté td .
• Mais pour avoir une valeur parlante, on le devise par le temps total d’une rotation du champ magnétique (Tmag)*, et on le multiplie par 360° pour avoir une valeur en °.
Timing= 360° * td
Tmag
• Intuitivement c’est l’avance que prend la bobine sur le pôle magnétique qu’elle attire (ou quelle pousse).
• Pour ceux qui sont habitués des moteurs thermique, c’est comparable à l’avance d’allumage.
• Le timing dépends du nombre des pôles, on se propose de donner une petite « modélisation/explication »
(*) correspond à un cycle complet d’alimentation des bobines.
22For information only
5. Annexes
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 4. L'ESC
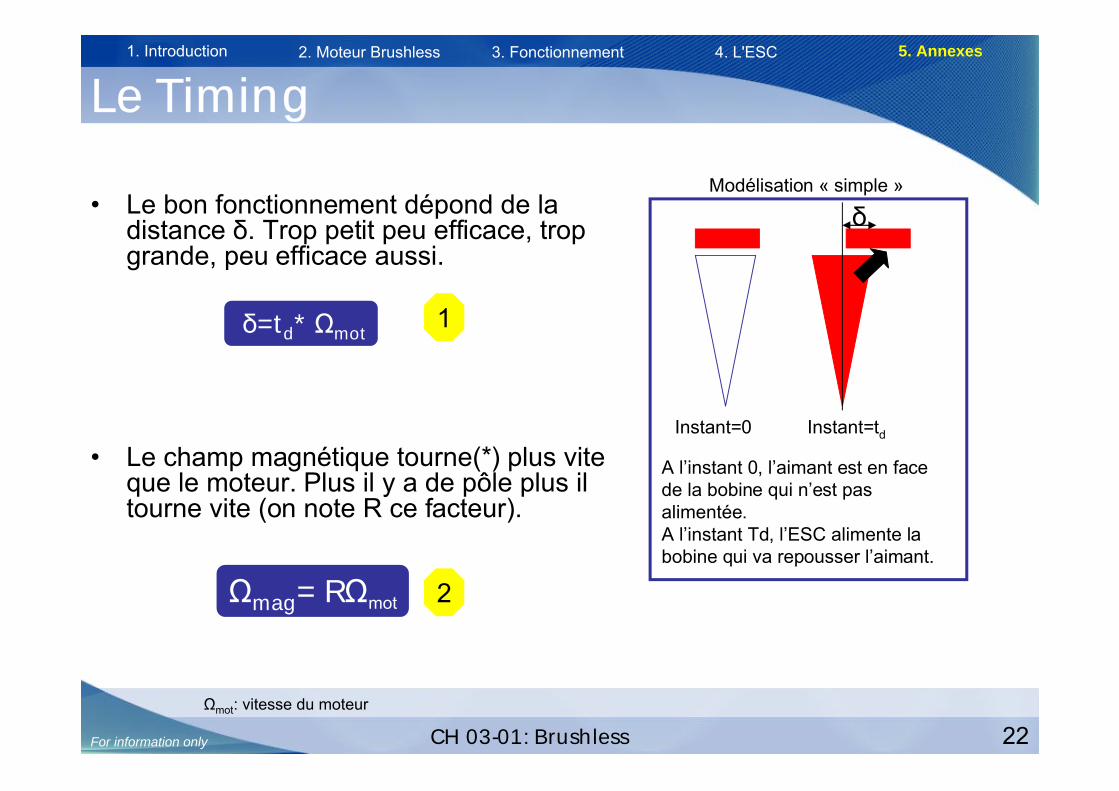
Le Timing
• Le champ magnétique tourne(*) plus vite que le moteur. Plus il y a de pôle plus il tourne vite (on note R ce facteur).
Ωmag= RΩmot
Instant=0 Instant=td
A l’instant 0, l’aimant est en face de la bobine qui n’est pas alimentée.A l’instant Td, l’ESC alimente la bobine qui va repousser l’aimant.
Modélisation « simple »
δ• Le bon fonctionnement dépond de la distance δ. Trop petit peu efficace, trop grande, peu efficace aussi.
δ=td* Ωmot
Ωmot: vitesse du moteur
1
2
23For information only
5. Annexes
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 4. L'ESC
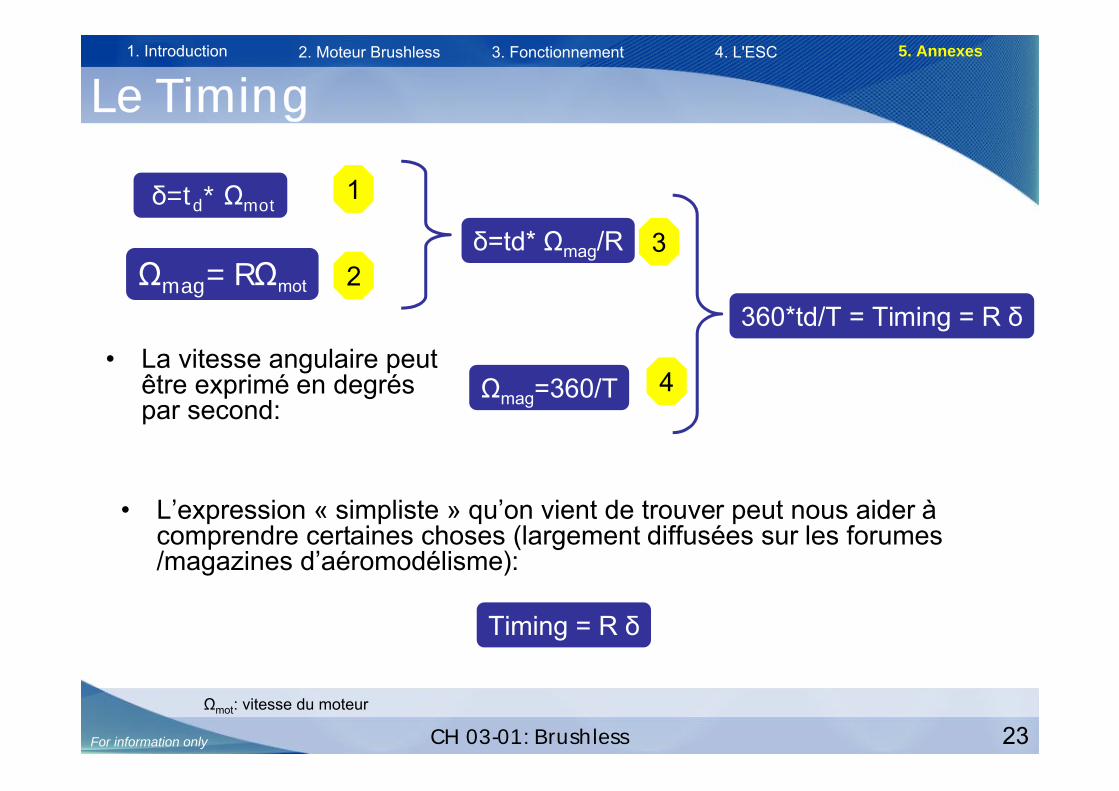
Le Timing
δ=td* Ωmag/R
Ωmot: vitesse du moteur
• La vitesse angulaire peut être exprimé en degrés par second:
Ωmag=360/T
3
4
360*td/T = Timing = R δ
Ωmag= RΩmot
δ=td* Ωmot1
2
• L’expression « simpliste » qu’on vient de trouver peut nous aider àcomprendre certaines choses (largement diffusées sur les forumes/magazines d’aéromodélisme):
Timing = R δ
24For information only
5. Annexes
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 4. L'ESC
Temps de commutation/timing
Un Timing élevé est synonyme de plus de vitesse et plus de puissance-> mais ça consomme plus et ça chauffe plus.
• Les Outrunner avec un nombre important de pôles ont une vitesse de champ plus importante (R important) donc il fonctionne avec un timing important.
• Pour se fixer les idée:– timing bas 0 à 5°– timing médium 5 à 15°– timing élevé 15 à 30°
25For information only
5. Annexes
CH 03-01: Brushless
1. Introduction 2. Moteur Brushless 3. Fonctionnement 4. L'ESC
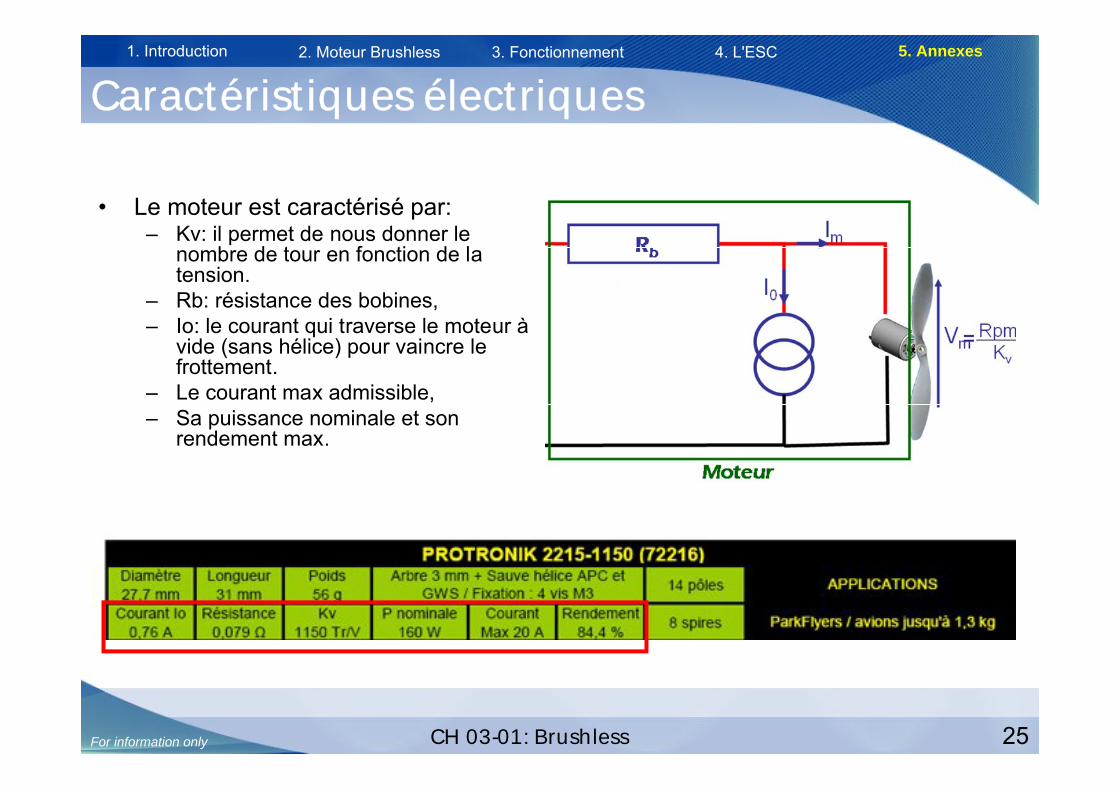
Caractéristiques électriques
• Le moteur est caractérisé par:– Kv: il permet de nous donner le
nombre de tour en fonction de la tension.
– Rb: résistance des bobines,– Io: le courant qui traverse le moteur à
vide (sans hélice) pour vaincre le frottement.
– Le courant max admissible,– Sa puissance nominale et son
rendement max.