-
3 INTERPOLATION AND CURVE FITTING
Introduction
Newton Interpolation: Finite Divided Difference
Lagrange Interpolation
Spline Interpolation
Polynomial Regression
Multivariable Interpolation
-
Chapter 3 Interpolation & Curve Fitting / 2
3.1 Introduction
• Interpolation is a technique to estimate the value between a
set of data.
• A general approach is to map the data into an n-th order
polynomial:
(3.1) ∑=
=+++=n
i
ii
nnn xaxaxaaxf
010)( L
• This chapter covers three types of techniques, i.e. the Newton
interpolation, the Lagrange interpolation and the Spline
interpolation.
• The resulting equation can be used for curve fitting.
-
Chapter 3 Interpolation & Curve Fitting / 3
3.2 Newton Interpolation: Finite Divided Difference
• For the linear interpolation, consider Fig. 3.1 and the
following relation:
( ) ( ) ( ) ( )01
01
0
01
xxxfxf
xxxfxf
−−
=−−
x
f(x)
x x1
f(x1)
f(x0)
x0
f(x)
FIGURE 3.1 Linear interpolation
Rearranging the above relation leads to
( ) ( )( ) ( ) ( 0
01
0101 xxxx
xfxfxfxf −⋅−
)−+= (3.2)
The term ( ) ( )[ ] ( )0101 xxxfxf −− is referred to as the
first-order finite divided difference.
Example 3.1
Calculate an approximate value of ln 2 using the linear
interpolation using the following ranges: (1,4) and (1,6). Use ln 1
= 0, ln 4 = 1.3862944 and ln 6 = 1.7917595 as the source data.
Estimate the relative error if the actual value is ln 2 =
0.69314718. Solution
For the linear interpolation between x0 = 1 and x1 = 6:
( ) ( ) 35835190.01216
07917595.1021 =−⋅−−
+=f
This produces a relative error of εt = 48.3%.
-
Chapter 3 Interpolation & Curve Fitting / 4
For the linear interpolation between x0 = 1 dan x1 = 4:
( ) ( ) 46209812.01214
03862944.1021 =−⋅−−
+=f
This produces a relative error of εt = 33.3%, which smaller than
the previous case.
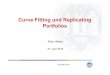
• For the quadratic interpolation, consider Fig. 3.2 and the
following relation:
0
1
2
0 2 4 6
yf(x) = ln x
x
f1(x)
FIGURE 3.2 The result for the linear interpolation for ln 2
( ) ( ) ( )( )1020102 xxxxbxxbbxf −−+−+= (3.3)
By taking the values of x equal to x0, x1 dan x2 in Eq. (3.3),
the coefficients bi can be calculated as followed:
( )00 xfb = (3.4a)
( ) ( )
01
011 xx
xfxfb−−
= (3.4b)
( ) ( ) ( ) ( )
02
01
01
12
12
2 xxxx
xfxfxx
xfxf
b−
−−
−−−
= (3.4c)
-
Chapter 3 Interpolation & Curve Fitting / 5
Example 3.2
Repeat Example 3.1 using the quadratic interpolation.
Solution
From Example 3.1, the data can be rewritten as followed:
7917595.1)(:63862944.1)(:4
0)(:1
22
11
00
======
xfxxfxxfx
Using Eq. (3.4):
051873113.016
1403862944.1
463862944.17917595.1
46209812.014
03862944.10
2
1
0
−=−
−−
−−−
=
=−
−=
=
b
b
b
Hence, Eq. (3.3) yields ( ) ( )( )41051873113.0146209812.00)(2
−−−−+= xxxxf
For x = 2:
( ) ( ) ( )( ).56584436.0
,4212051873113.01246209812.0022=
−−−−+=f
This produces the relative error εt = 18.4% as shown below.
-
Chapter 3 Interpolation & Curve Fitting / 6
0
1
2
0 2 4 6
y
f(x) = ln x
x
f2(x)
f1(x)
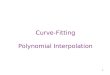
FIGURE 3.3 The result for the quadratic interpolation for ln
2
• The general form representing an n-th order interpolation
function (requires n+1 pairs of data) is:
( ) ( ) ( )( ) ( )110010 −−−−++−+= nnn xxxxxxbxxbbxf LL
(3.5)
where the coefficients bi can be obtained via
( )[ ][ ]
[ ]011
0122
011
00
,,,,
,,,
xxxxfb
xxxfbxxfb
xfb
nnn K
M
−=
===
where the terms […] are finite divided differences and are
defined as:
[ ] ( ) ( )ji
jiji xx
xfxfxxf
−
−=, (3.6a)
[ ] [ ] [ ]ki
kjjikji xx
xxfxxfxxxf
−
−=
,,,, (3.6b)
[ ] [ ] [ ]0
0121121011
,,,,,,,,,,,,xx
xxxxfxxxxfxxxxfn
nnnnnn −
−= −−−−
KKK (3.6c)
Hence, Eq. (3.5) forms the Newton interpolation polynomial:
( ) ( ) ( ) [ ] ( )( ) [ ]
( )( ) [ 01110012100100
,,,)(,,,
xxxfxxxxxxxxxfxxxxxxfxxxfxf
nnn
n
KLL −−−−−++ ]−−+−+=
(3.7)
-
Chapter 3 Interpolation & Curve Fitting / 7
TABLE 3.1 Newton finite divided difference interpolation
polynomial
i xi f(xi ) I II III0 x0 f (x0) f [x1,x0] f [x2,x1,x0] f
[x3,x2,x1,x0]
1 x1 f (x1) f [x2,x1] f [x3,x2,x1]
2 x2 f (x2) f [x3,x2]
3 x3 f (x3)
• The relation for error for the n-th order interpolation
function can be estimated using:
[ ]( )( ) ( )nnnnn xxxxxxxxxxfR −−−≈ −+ LK 10011 ,,,, (3.8)
Example 3.3
Repeat Example 3.1 with an additional fourth point of x3 = 5,
f(x3) = 1.6094379 using the third order Newton interpolation
polynomial. Solution
The third order Newton interpolation polynomial can be written
as
( ) ( ) ( )( ) ( )( )( )21031020103 xxxxxxbxxxxbxxbbxf
−−−+−−+−+=
i xi f(xi ) I II III0 1 0 0.46209813 −0.0597386 0.00786553
1 4 1.3862944 0.22314355 −0.0204110
2 5 1.6094379 0.18232156
3 6 1.7917595
Thus,
( ) ( ) ( )( )( )( )( ),54100786553.0
410597386.0146209812.003−−−+
−−−−+=xxx
xxxxf
( ) ( ) ( )( )( )( )( )
.6287691.0,52421200786553.0
42120597386.01246209812.0023
=−−−+
−−−−+=f
and producing a relative error of εt = 9.29%.
-
Chapter 3 Interpolation & Curve Fitting / 8
0
1
2
0 2 4 6
y
f(x) = ln x
x
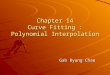
f3(x)
TABLE 3.4 The result for the cubic interpolation for ln 2
-
Chapter 3 Interpolation & Curve Fitting / 9
3.3 Lagrange Interpolation
• The formula for the Lagrange interpolation is:
(3.9) ( ) ( ) ( )∑=
=n
iiin xfxLxf
0
where the parameter Li(x) is defined as
( ) ∏≠= −
−=
n
ijj ji
ji xx
xxxL
0 (3.10)
• For n = 1, the first order Lagrange interpolation function can
be written as:
( ) ( ) ( )101
00
10
11 xfxx
xxxfxxxxxf
−−
+−−
=
• For n = 2, the second order Lagrange interpolation can be
written as:
( ) ( )( )( )( ) ( )( )( )
( )( ) ( )
( )( )( )( ) ( )21202
10
12101
200
2010
212
xfxxxx
xxxx
xfxxxx
xxxxxfxxxx
xxxxxf
−−−−
+
−−−−
+−−
−−=
• The error term for the Lagrange interpolation can be estimated
using:
(3.11) [ ] (∏=
−+ −=n
iinnnn xxxxxxfR
0011 ,,,, K )
Example 3.5
Repeat Examples 3.1 and 3.2 using the first and second order
Lagrange interpolation functions, respectively. Solution
From Examples 3.1:
7917595.1)(:63862944.1)(:4
0)(:1
22
11
00
======
xfxxfxxfx
-
Chapter 3 Interpolation & Curve Fitting / 10
For the first order Lagrange interpolation:
( ) ( ) ( )
( ) ( ) ( )
4620981.0
3862944.114120
414221
101
00
10
11
=−−
+−−
=∴
−−
+−−
=
f
xfxxxxxf
xxxxxf
For the second order Lagrange interpolation:
( ) ( )( )( )( ) ( )( )( )
( )( ) ( )
( )( )( )( ) ( )21202
10
12101
200
2010
212
xfxxxx
xxxx
xfxxxx
xxxxxfxxxx
xxxxxf
−−−−
+
−−−−
+−−
−−=
( )( )( )( ) ( )
( )( )( )( ) ( )
( )( )( )( ) ( )
5658444.0
7917595.146164212
3862944.1641462120
61416242)2(2
=−−−−
+
−−−−
+−−−−
=f
-
Chapter 3 Interpolation & Curve Fitting / 11
3.4 Spline Interpolation
• The polynomial interpolation can cause oscillation to the
function and this can be remedied by using the spline
interpolation.
x
f(x)
x
f(x)
(a) polynomial (b) Linear spline FIGURE 3.5 Comparison between
polynomial and spline interpolation
• The formula for the linear spline interpolation for n+1 data
between points x0 and xn (n intervals) is
( ) ( ) ( )( ) ( ) ( )
( ) ( ) ( ) nnnnnn xxx
xxxxxx
xxmxfxf
xxmxfxfxxmxfxf
≤≤
≤≤≤≤
−+=
−+=−+=
−−−− 1
21
10
1111
11121
00011
untuk
untuk untuk
MM (3.12)
dengan mi is the gradient for the (i+1)-th interval:
( ) ( )
ii
iii xx
xfxfm−−
=+
+
1
1 (3.13)
Example 3.6
Use the following data to estimate the function f(x) at x = 5
using the linear spline interpolation.
x f(x) 3.0 2.5 4.5 1.0 7.0 2.5 9.0 0.5
-
Chapter 3 Interpolation & Curve Fitting / 12
Solution
The value of x = 5 is in the range 75.4 ≤≤ x , where the
gradient is
60.05.40.70.15.2
1 =−−
=m
From Eq. (3.12): ( ) ( ) ( )( ) ( ) .3.15.4560.00.15
,
21
11121
=−+=
−+=
fxxmxfxf
0
2
2 4 6 8 x
f(x)
FIGURE 3.6 Linear spline interpolation for Example 3.6
• For the quadratic spline, the general polynomial for each
interval is
( ) iiii cxbxaxf ++= 22 (3.14)
The coefficient ai, bi and ci for each interval can be evaluated
using:
1. Continuity at vertices (2n−2 equations):
( )11112 11 −−−−−− =++ iiiiii xfcxbxa (3.15) ( )112 1 −−− =++
iiiiii xfcxbxa (3.16)
2. Conditions at end points (2 equations):
( )0101201 xfcxbxa =++ (3.17) ( )nnnnnn xfcxbxa =++2 (3.18)
-
Chapter 3 Interpolation & Curve Fitting / 13
3. Differentiability at vertices (n−1 equations):
( ) baxxf +=′ 2 iiiiii bxabxa +=+ −−−− 1111 22 (3.19)
4. Assumption at the first interval (1 persamaan):
01 =a (3.20)
x
f(x)
0
2
2 4 6 8
FIGURE 3.7 The quadratic spline interpolasi for example 3.7
• For the cubic spline, the general polynomial for each interval
is
(3.21) ( ) iiiii dxcxbxaxf +++= 233
• The formulation for the cubic spline can be derived as
followed:
For interval (xi−1, xi), the second derivative can be written
as:
( ) ( ) ( )1
1
11
−
−
−− −
−′′+−
−′′=′′ii
iii
ii
iiii xx
xxxfxx
xxxfxf (3.22)
The integration of Eq. (3.22) twice produces two integration
constants, which can be evaluated using ( ) ( )1−= ixfxf at xi−1
and at x( ) ( )ixfxf = i, thus produces
( ) ( )( ) ( )( )
( ) ( )
( )( )
( )( ) ( )
( )( )
( )( ) ( )111
11
1
1
31
1
3
1
13
6
6
66
−−
−
−−
−
−
−−−
−
−⎥⎦
⎤⎢⎣
⎡ −′′−
−+
−⎥⎦
⎤⎢⎣
⎡ −′′−
−+
−−′′
+−−
′′=
iiii
ii
i
iiii
ii
i
iii
ii
ii
ii
xxxxxfxxxf
xxxxxfxx
xf
xxxx
xfxxxx
xfxf
(3.23)
-
Chapter 3 Interpolation & Curve Fitting / 14
The differentiability can be maintained troughout the function
via
( ) ( )iiii xfxf ′=′−1 (3.24)
Eq. (3.23) can be differentiated for both the (i−1)-th and i-th
intervals and following Eq. (3.24):
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )[ ] ( ) ( ) ( )[ iiiiiiii
iiiiiiiii
xfxfxx
xfxfxx
xfxxxfxxxfxx
−−
+−−
=
′′
]
−+′′−+′′−
−−
++
++−+−−
11
11
111111
662
(3.25)
Example 3.8
Repeat Example 3.6 using the cubic spline interpolation.
Solution
Using Eq. (3.25) for the first interval (i = 1):
( ) ( ) ( ) ( ) ( ) (
( )
)
( ) ( ) ( )15.235.4615.2
5.476
75.475.4372335.4
−−
+−−
=
′′−+′′−+′′− fff
It is known that . Hence ( ) 03 =′′f( ) ( ) 6.975.25.48 =′′+′′
ff
For the second interval (i = 2): ( ) ( ) 6.9795.45.2 −=′′+′′
ff
Both equations is solved simultaneously to yield ( )
( ) 53308.1767909.15.4
=′′=′′
ff
Using Eq. (3.23) for the first interval:
( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( ).3246894.05.4666667.13186566.0
,36
35.467909.135.4
1
5.435.4
5.2335.46
67909.1
3
313
−+−+−=
−⎥⎦⎤
⎢⎣⎡ −−
−+
−−
+−−
=
xxx
x
xxxf
-
Chapter 3 Interpolation & Curve Fitting / 15
For the second and third intervals:
( ) ( ) ( ) (( )
( ) ( ) ( ) ( )725.09761027.19127757.05.4638783.1
7299621.05.4102205.07111939.0
333
3323
−+−+−−=
−+
−−−−−=
xxxxf
xxxxxf )
At x = 5, use the function for the second interval:
( ) ( ) ( ) (( )
.102886.1,5.45638783.1
57299621.05.45102205.057111939.05 3323
=−+
−−−−−=f )
0
2
2 4 6 8 x
f(x)
Cubic Spline
Cubic Newton/ Lagrange Interpolation
FIGURE 3.8 The cubic spline interpolation for Example 3.8
-
Chapter 3 Interpolation & Curve Fitting / 16
3.5 Polynomial Regression
• A “best fit” polynomial of an order lower than the number of
intervals is sometimes required to represent the data and can be
evaluated via polynomial regression.
• Consider the following form of polynomial:
(3.26) ( ) nn xaxaxaaxf ++++= L2210where the error for the i-th
data (xi,yi) is
( ) niniiiiii xaxaxaayxfye −−−−−=−= L2210
The sum of the squares of error for N data is
(3.27) ( )∑∑==
−−−−−==N
i
niniii
N
ii xaxaxaayeS
1
22210
1
2 L
These errors can be minimised as followed:
( )( )
( )( )
( )∑
∑
∑
=
=
=
−−−−−−==∂∂
−−−−−−==∂∂
−−−−−−==∂∂
N
i
ni
niniii
n
N
ii
niniii
N
i
niniii
xxaxaxaayaS
xxaxaxaayaS
xaxaxaayaS
1
2210
1
2210
1
1
2210
0
20
20
120
L
M
L
L
( )
producing the following system of equations:
(3.28)
ini
nin
ni
ni
ni
iininiii
iininiii
ininii
yxxaxaxaxa
yxxaxaxaxa
yxxaxaxaxa
yxaxaxaNa
∑=∑++∑+∑+∑
∑=∑++∑+∑+∑
∑=∑++∑+∑+∑
∑=∑++∑+∑+
++
+
+
222
110
2242
31
20
132
210
2210
L
M
L
L
L
-
Chapter 3 Interpolation & Curve Fitting / 17
or, in a form of matrix equation:
(3.29)
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
∑
∑∑∑
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
⋅
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∑∑∑∑
∑∑∑∑∑∑∑∑∑∑∑
++
+
+
ini
ii
ii
i
nn
ini
ni
ni
niiii
niiii
niii
yx
yxyx
y
a
aaa
xxxx
xxxxxxxxxxxN
MM
L
MOMMM
L
L
L
22
1
0
221
2432
132
2
• The standard deviation σ for this case can be evaluated as
followed:
111
2
+−=
+−=
∑=
nN
e
nNS
N
ii
σ (3.30)
• The case for n = 1 is referred to as the linear
regression:
xaay 10 +=
(3.31) ⎭⎬⎫
⎩⎨⎧
∑∑
=⎭⎬⎫
⎩⎨⎧
⋅⎥⎦
⎤⎢⎣
⎡∑∑∑
ii
i
ii
i
yxy
aa
xxxN
1
02
Example 3.9
Determine a best-fit quadratic equation which can represent the
following experimental data:
xi 0.05 0.11 0.15 0.31 0.46 0.52 yi 0.956 0.890 0.832 0.717
0.571 0.539
xi 0.70 0.74 0.82 0.98 1.17 yi 0.378 0.370 0.306 0.242 0.104
Solution
For n = 2, the quadratic polynomial can be written as
( ) 2210 xaxaaxf ++=
-
Chapter 3 Interpolation & Curve Fitting / 18
From Eq. (3.28):
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∑∑∑
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧⋅
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
∑∑∑∑∑∑∑∑
ii
ii
i
iii
iii
ii
yxyx
y
aaa
xxxxxxxxN
22
1
0
432
32
2
From the following table:
3357.19161.31839.21150.4905.56545.4
1101.6
24
3
2
=∑=∑=∑=∑=∑=∑==∑
iii
iii
ii
i
yxxyxxyxNx
Hence the matrix equation becomes:
225.0018.1998.03357.11839.2905.5
9161.31150.46545.41150.46545.401.66545.401.611
210
2
1
0
=−==
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧⋅
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
aaaaaa
Hence, the quadratic function which can represent the data
is
( ) 2225.0018.1998.0 xxxf +−=
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1 1.2
y
x
f(x)
FIGURE 3.9 The fitting of data using a quadratic function
-
Chapter 3 Interpolation & Curve Fitting / 19
3.6 Multivariable Interpolation
• The Newton, Lagrange and spline interpolation method can be
applied for multivariable cases, e.g. for two and three
variables:
(3.32) ( ) ( ) ( ) (∑∑= =
⋅=p
i
q
jjiyxpq yxfyLxLyxf ji
0 0,, )
) (3.33) ( ) ( ) ( ) ( ) (∑∑∑= = =
⋅⋅=p
i
q
j
r
kkjizyxpqr zyxfzLyLxLzyxf kji
0 0 0
,,,,
where
( ) ( ) ( ) ∏∏∏≠=
≠=
≠= −
−=
−−
=−−
=r
kll lk
lz
q
jll lj
ly
p
ill li
lx zz
zzzLyyyyyL
xxxxxL
kji000
• For example, Eq. (3.32) can be expanded as
( ) ( )( )( )( ) ( )( )( )
( )( ) ( )
( )( )( )( ) ( )
( )( )( )( ) ( )110101
0010
0110
01
011001
1000
1010
111,1
,,
,,,
yxfyyxx
yyxxyxfxyxx
yyxx
yxfyyxx
yyxxyxfyyxx
yyxxyxf
−−−−
+−−
−−+
−−−−
+−−
−−=
Example 3.10
The following table show the topology of a 3-D non-planar
surface:
y z = f(x,y)
0.2 0.3 0.4 0.5
1.0 0.640 1.003 1.359 1.703
1.5 0.990 1.524 2.045 2.549 x
2.0 1.568 2.384 3.177 3.943
Use the Newton interpolation to estimate the value of z at the
coordinat (1.6, 0.33). As a comparison, the above data follows the
function
( ) 1.0sin, −+= yyeyxf x , thus f(1.6, 0.33) = 1.8350.
-
Chapter 3 Interpolation & Curve Fitting / 20
Solution
At x = 1.0:
j yj f(1.0, yj) I II III0 0.2 0.640 0.363 −0.007 0.005
1 0.3 1.003 0.356 −0.012
2 0.4 1.359 0.344
3 0.5 1.703
( ) ( ) ( )( )( )( )( )
( ) .1108.133.0,0.1,4.03.02.0005.0
3.02.0007.02.0363.0640.0,0.1
1
1
=−−−+
−−−−+=
fyyy
yyyyf
At x = 1.5:
j yj f(1.5, yj) I II III0 0.2 0.990 0.534 −0.013 −0.004
1 0.3 1.524 0.521 −0.017
2 0.4 2.045 0.504
3 0.5 2.549
( ) ( ) ( )( )( )( )( )
( ) .6818.133.0,5.1,4.03.02.0004.0
3.02.0013.02.0534.0990.0,5.1
1
1
=−−−−
−−−−+=
fyyy
yyyyf
At x = 2.0:
j yj f(2.0, yj) I II III0 0.2 1.568 0.816 −0.023 −0.004
1 0.3 2.384 0.793 −0.027
2 0.4 3.177 0.766
3 0.5 3.943
( ) ( ) ( )( )( )( )( )
( ) .6245.233.0,0.2,4.03.02.0004.0
3.02.0023.02.0816.0568.1,0.2
1
1
=−−−−
−−−−+=
fyyy
yyyyf
-
Chapter 3 Interpolation & Curve Fitting / 21
Next, at y = 0.33:
i xi f(xi, 0.33) I II0 1.0 1.1108 0.5710 0.3717
1 1.5 1.6818 0.9427
2 2.0 2.6245
( ) ( ) ( )( )( ) .8406.133.0,6.1
,5.10.13717.00.15710.01108.133.0,
1,1
1,1
=
−−+−+=
fxxxxf
This produces a relative error of εt = 0.305%.
-
Chapter 3 Interpolation & Curve Fitting / 22
Exercise
1. The fuel consumption of an engine has been recorded as shown
in the following table.
Time, hour Fuel, liter
1.2 0.33201 1.7 0.54739 1.8 0.60496 2.0 0.73891
If a user runs the engine for 1.55 hours, determine the
estimated fuel consumption using the Newton and Lagrange
interpolation methods.
2. The following data shows the height function of a hill a a
distance x from a reference. Form a cubic polynomial via
regression.
xi 0 1 2 3 4 5 6 7 8
hi 4 5 10 17 21 16 11 3 1
Also, calculate the corresponding standard deviation.
3. The following data represents temperature distribution T(x,y)
in a metal plate:
y coordinate Temperature T(x,y) 0.5 1.0 1.5 2.0
0.5 7.51 10.05 12.70 15.67
1.0 10.00 10.00 10.00 10.00
1.5 12.51 9.95 7.32 4.33
x co
ordi
nate
2.0 15.00 10.00 5.00 0.00
Estimate the temperature at the coordinate (x, y) = (1.15, 1.42)
using:
a. the Newton linear interpolation, b. the Newton cubic
interpolation.
3.1 Introduction3.2 Newton Interpolation: Finite Divided
DifferenceExample 3.1SolutionExample 3.2Solution
Example 3.3Solution
3.3 Lagrange InterpolationExample 3.5Solution
3.4 Spline InterpolationExample 3.6SolutionExample
3.8Solution
3.5 Polynomial RegressionExample 3.9Solution
3.6 Multivariable InterpolationExample 3.10Solution
Exercise