Embed Size (px)
Citation preview

MSC MATHEMATICS
MASTER THESIS
Numerical Methods for Elliptic PartialDifferential Equations with Random
Coefficients
Author: Supervisor:Chiara Pizzigoni dr. S.G. Cox
prof. dr. R.P. Stevenson
Examination date:March 9, 2017
Korteweg-de Vries Institute forMathematics

Abstract
This thesis analyses the stochastic collocation method for approximating the solutionof elliptic partial differential equations with random coefficients. The method consistsof a finite element approximation in the spatial domain and a collocation at the zeros ofsuitable tensor product orthogonal polynomials in the probability space and naturallyleads to the solution of uncoupled deterministic problems. The computational cost ofthe method depends on the choice of the collocation points and thus we compare fewpossible constructions. Although the random fields describing the coefficients of theproblem are in general infinite-dimensional, an approximation with certain optimalityproperties is obtained by truncating the Karhunen-Loéve expansion of these randomfields. We estimate the convergence rates of the method, depending on the regularity ofthe random coefficients. In particular we prove exponential convergence in probabilityspace. Numerical examples illustrate the theoretical results.
Title: Numerical Methods for Elliptic Partial Differential Equations with Random Co-efficientsAuthor: Chiara Pizzigoni, [email protected], 10978801Supervisor: dr. S.G. Cox, prof. dr. R.P. StevensonExamination date: March 9, 2017
Korteweg-de Vries Institute for MathematicsUniversity of AmsterdamScience Park 105-107, 1098 XG Amsterdamhttp://kdvi.uva.nl
ii

Contents
Acknowledgements v
Introduction vii
1 Preliminaries 11.1 The Karhunen-Loève Expansion . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Existence of the Karhunen-Loève Expansion . . . . . . . . . . . . 11.1.2 Truncation of the Karhunen-Loève Expansion . . . . . . . . . . . 7
1.2 The Karhunen-Loève Expansion of a Random Field . . . . . . . . . . . . 101.2.1 More on Convergence of the Karhunen-Loève Expansion . . . . . 12
2 Problem Setting 152.1 Strong and Weak Formulations . . . . . . . . . . . . . . . . . . . . . . . . 152.2 Finite-Dimensional Stochastic Space . . . . . . . . . . . . . . . . . . . . . 17
3 The Stochastic Collocation Method 193.1 Full Tensor Grid of Collocation Points . . . . . . . . . . . . . . . . . . . . 193.2 Sparse Tensor Grid of Collocation Points . . . . . . . . . . . . . . . . . . . 21
3.2.1 Anisotropic Version . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4 Convergence of the Method 274.1 Regularity Results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.2 Convergence Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2.1 Error of the Truncation . . . . . . . . . . . . . . . . . . . . . . . . . 354.2.2 Finite Element Error . . . . . . . . . . . . . . . . . . . . . . . . . . 364.2.3 Collocation Error - Full Tensor Method . . . . . . . . . . . . . . . 374.2.4 Convergence Result . . . . . . . . . . . . . . . . . . . . . . . . . . 474.2.5 Collocation Error - Sparse Tensor Method . . . . . . . . . . . . . . 48
4.3 Convergence of Moments . . . . . . . . . . . . . . . . . . . . . . . . . . . 514.4 Anisotropic Sparse Method - Selection of Weights α . . . . . . . . . . . . 52
5 Numerical Implementation 535.1 Example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535.2 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Summary 61
Bibliography 63
iii


Acknowledgements
I am more than grateful to Sonja and Rob. Thank you for supporting me and not onlysupervising. In Italian the word support is translated with supporto and if you changeonly one letter getting sopporto, the meaning will become the slightly more negativetolerate. So I really have to thank you for both supporting and stand me. Thank you forthe time, the energies and the attention that both of you have dedicated to me.
When the mathematics is not the biggest problem, I can always rely on them. Thankyou Sara for enlightening when I can see nothing but darkness. Thank you Marco forbeing always next to me even if you are far away. Thanks to my soul mates, Francesca,Linda and Alessia, loyal mates and beautiful souls.
Silvia, thank you for being simply the best person standing by my side and for givingyour all to me.
I personally think that behind great men and women there are always great parents.So thank you mum and dad for being great even if I am not. Grazie!
v


Introduction
Elliptic second order partial differential equations are well suited to describe a widevariety of phenomena which present a static behaviour, e.g. the stationary solution toa diffusion problem. An entire branch of research is dedicated to the theoretical anal-ysis and numerical implementation of methods which allow to approximate the exactsolution of these equations. On the other hand one should always keep in mind that inpractice these models are approximations of the physical system and they do not de-scribe the given problem exactly. Therefore we aim to study equations which accountas much as possible for the uncertainties arising naturally from the mathematical ob-servation of the real world. Sources of such uncertainties can be for example errors inthe measurements, the intrinsic nature of the system, partially known data sets or anoverall knowledge extrapolated from only a few spatial locations.The mathematical model describing a phenomenon can be thought as an input-outputmachine which takes some functions and returns the solution of the model. Hence weexpect the inaccuracies in the inputs to easily propagate to the output.
In order to include in our mathematical examination all these moderately predictablefactors, we model them as noises following some probability distribution. Thus weturn our attention to partial differential equations where the coefficients are randomfields depending on these uncertain parameters. Namely, instead of focusing on ellipticequations, defined on a spatial domain D ⊂ Rd, of the form
−∇ · (a(x)∇u(x)) = f(x), x ∈ D,
we consider the following model
−∇ · (a(ω,x)∇u(ω,x)) = f(ω,x), (ω,x) ∈ Ω×D (0.0.1)
where Ω is the set of possible outcomes. Again the main difference relies on the factthat the functions of the second problem have a stochastic representation emphasizingthe inexactness of the coefficients of which we suppose to know the law.
In our discussion we consider a particular parametrization of the random coefficientsgiven by the Karhunen-Loève expansion, a linear combination of infinitely many un-correlated random variables. This choice is motivated because it guarantees some op-timal results as it has been proved in [14]. We underline the fact that in general thisdecomposition is infinite-dimensional. The computational necessity to deal with finite-dimensional objects leads to the need of truncating the Karhunen-Loève expansion andthe quantification of the consequent error.
To approximate numerically the solution of problem (0.0.1) appended with some suit-able boundary conditions, we will use the stochastic collocation method which employs
vii

standard deterministic techniques in the spatial domain and tensor product polynomialapproximation in the random domain. This method is extensively analysed in [11]. Un-fortunately tensor product spaces suffer from the so-called curse of dimensionality asthe dimension of the polynomial space grows exponentially fast in the number of termsthat we keep in the Karhunen-Loève truncation. In case where this number becomesquite large we may switch to sparse tensor product spaces which highly reduce thecomputational complexity of the method while preserving a good effectiveness (see[12]).
Concretely the procedure consists in approximating, using the Galerkin finite ele-ment scheme, the solutions of problems which are deterministic in the domain D oncewe evaluate the probabilistic variables at several collocation points. The final approx-imation is then recovered by interpolating the semi-discrete finite element approxima-tions. This approach differs from the widely used Monte Carlo method in the selectionof the evaluation points. The latter adopts a random pick subject to a given distribu-tion. By applying the stochastic collocation method instead, the points are chosen asthe roots of (possibly sparse) tensor product polynomials orthogonal with respect tothe joint probability density of the random variables appearing in the Karhunen-Loèvetruncation. This preference benefits from the nice properties of the zeros of orthogo-nal polynomials (see [15], Chapter III). While keeping the advantage of solving uncou-pled deterministic problems as in the Monte Carlo approach, the stochastic collocationachieves a faster convergence rate as we will prove in Chapter 4.
The main goals of this work are to provide a rigorous investigation on the existence ofthe Karhunen-Loève parametrization and how its truncation influences our analysis, todescribe the numerical techniques to solve a stochastic model problem and to estimatein detail the errors arising from the subsequent approximations that we introduce.
The outline of the thesis is as follows: Chapter 1 focuses on the existence of theKarhunen-Loève expansion of an element in a tensor product Hilbert space and on theestimation of the error, measured in some suitable norm, which arises as a consequenceof truncating the expansion. Afterwards this abstract setting is tuned to our specificsituation, analysing the results in the special case of random fields.
Chapter 2 describes the infinite-dimensional boundary value problem whose solu-tion we want to approximate. In particular we show that such a solution indeed existsand in order to give an approximation, we turn to the corresponding finite-dimensionalproblem where all the random fields are represented by truncations of the Karhunen-Loève decomposition.
In Chapter 3 we present the stochastic collocation method, both in its full and sparseversions, and briefly discuss the anisotropic (direction dependent) variant of the lastone.
The aim of Chapter 4 is to provide a rigorous error estimate of the entire methodby splitting the error into three parts: the truncation error, the approximation error inthe spatial domain and the approximation error in the stochastic space. In particularthe latter is analysed both for the full and sparse version of the method comparing theconvergence rate of the two. This is done under some mild regularity assumptions onthe coefficients entering the problem which we need to impose in order to ensure cor-
viii

responding regularity of the solution in the random domain. The theoretical result con-cerning the collocation error, which is obtained conducting a stepwise one-dimensionalanalysis, guarantees exponential convergence in the random space for both variants ofthe stochastic collocation method.
Chapter 5 is devoted to some computational examples including a numerical com-parison with the Monte Carlo method.
ix


1 Preliminaries
1.1 The Karhunen-Loève Expansion
Uncertainties in a physical model are very often modelled as random fields. The aim ofthis section is to prove that any infinite-dimensional random field can be representedby the so-called Karhunen-Loève expansion which is roughly speaking an infinite lin-ear combination of uncorrelated random variables. Moreover the best (in terms of meansquare error) finite-dimensional approximation of the random field is obtained by trun-cating this expansion. We will give precise bounds for this error. Following [14], wedevelop our construction in the general framework of Hilbert spaces. Throughout thischapter all Hilbert spaces are real and separable unless stated otherwise.
1.1.1 Existence of the Karhunen-Loève Expansion
Let (H1, 〈·, ·〉H1), (H2, 〈·, ·〉H2) and (S, 〈·, ·〉S) be separable Hilbert spaces over R. For i ∈1, 2, let (e
(i)n )n∈Ii and (sm)m∈J be orthonormal bases of Hi and S, respectively, with Ii
and J countable sets. For x ∈ Hi and y ∈ S define the bilinear form x⊗ y : Hi × S → R
[x⊗ y](a, b) := 〈x, a〉Hi〈y, b〉S , (a, b) ∈ Hi × S.
Let E be the set of all finite linear combinations of such bilinear forms. We define theinner product 〈·, ·〉Hi⊗S on E as follows
〈x1 ⊗ y1, x2 ⊗ y2〉Hi⊗S := 〈x1, x2〉Hi〈y1, y2〉S
where x1, x2 ∈ Hi and y1, y2 ∈ S.
Definition 1.1.1. The tensor product ofHi and S denoted byHi⊗S is defined as the completionof E under the inner product 〈·, ·〉Hi⊗S .
It can be shown that (e(i)n ⊗ sm)(n,m)∈Ii×J is an orthonormal basis for the space Hi⊗S
[1, Section II.4]. Thus we can represent any element f ∈ Hi ⊗ S as
f =∑
(n,m)∈Ii×J
cn,me(i)n ⊗ sm
where cn,m = 〈f, e(i)n ⊗ sm〉Hi⊗S and
∑(n,m)∈Ii×J c
2n,m = ‖f‖2Hi⊗S .
Define fm :=∑
n∈Ii cn,me(i)n ∈ Hi. It is useful for later use to observe that ‖fm‖2Hi =∑
n∈Ii c2n,m. We get the following expansion for any element f ∈ Hi ⊗ S :
f =∑m∈J
fm ⊗ sm.
1

We can prove the following
Proposition 1.1.2. Let f ∈ H1 ⊗ S and g ∈ H2 ⊗ S. The map C·,· : (H1 ⊗ S)× (H2 ⊗ S)→H1 ⊗H2 defined as
Cfg =∑m∈J
fm ⊗ gm
is bilinear, well-defined and independent on the choice of the orthonormal basis in S.
Proof. Bilinearity comes directly from the distributive property of tensor product.We prove that the map is well-defined:
‖Cfg‖H1⊗H2 ≤∑m∈J‖fm ⊗ gm‖H1⊗H2 =
∑m∈J‖fm‖H1‖gm‖H2
≤
(∑m∈J‖fm‖2H1
) 12(∑m∈J‖gm‖2H2
) 12
= ‖f‖H1⊗S‖g‖H2⊗S
where we have used the Cauchy-Schwarz inequality.Finally we show that the map is independent on the choice of the orthonormal basisin S. Let smm∈J be an orthonormal basis of S and s′mm∈J be a second one. Conse-quently for each m ∈ J there exist (γn,m)n∈J ⊂ R such that s′m =
∑n∈J γn,msn. By the
orthonormality condition it follows that∑n∈J
γn,mγn,k = δmk.
Indeed
δmk = 〈s′m, s′k〉S = 〈∑n∈J
γn,msn,∑l∈J
γl,ksl〉S =∑
(n,l)∈J×J
γn,mγl,k〈sn, sl〉S
=∑
(n,l)∈J×J
γn,mγl,kδnl =∑n∈J
γn,mγn,k.
Let e(i)n n∈Ii be an orthonormal basis ofHi. As f ∈ H1⊗S there exist (αn,m)(n,m)∈I1×J ⊂
R such thatf =
∑(n,m)∈I1×J
αn,me(1)n ⊗ sm.
Similarly as g ∈ H2 ⊗ S there exist (βn,m)(n,m)∈I2×J ⊂ R such that
g =∑
(n,m)∈I2×J
βn,me(2)n ⊗ sm.
Now we expand f and g with respect to the basis s′mm∈J :
f =∑
(n,k)∈I1×J
α′n,ke(1)n ⊗ s′k =
∑k∈J
∑(n,m)∈I1×J
(α′n,kγm,k)e(1)n ⊗ sm,
2

g =∑
(n,k)∈I2×J
β′n,ke(2)n ⊗ s′k =
∑k∈J
∑(n,m)∈I2×J
(β′n,kγm,k)e(2)n ⊗ sm.
By uniqueness of the expansion it holds
αn,m =∑k∈J
α′n,kγm,k, βn,m =∑k∈J
β′n,kγm,k.
Therefore we have
C(sm)f,g =
∑m∈J
∑n∈I1
αn,me(1)n
⊗∑l∈I2
βl,me(2)l
=
∑(n,l,m)∈I1×I2×J
(αn,mβl,m)e(1)n ⊗ e
(2)l
=∑
(n,l,m)∈I1×I2×J
(∑k∈J
α′n,kγm,k
)(∑i∈J
β′l,iγm,i
)e(1)n ⊗ e
(2)l
=∑
(n,l)∈I1×I2
∑(m,k,i)∈J×J×J
α′n,kβ′l,iγm,kγm,i
e(1)n ⊗ e
(2)l
=∑
(n,l)∈I1×I2
∑(k,i)∈J×J
α′n,kβ′l,i
∑m∈J
γm,kγm,i
e(1)n ⊗ e
(2)l
=∑
(n,l)∈I1×I2
∑(k,i)∈J×J
α′n,kβ′l,iδki
e(1)n ⊗ e
(2)l
=∑
(n,l)∈I1×I2
(∑k∈J
α′n,kβ′l,k
)e(1)n ⊗ e
(2)l
=∑k∈J
∑n∈I1
α′n,ke(1)n
⊗∑l∈I2
β′l,ke(2)l
= C(s′m)f,g .
As a consequence of the previous result we are allowed to introduce the following
Definition 1.1.3. Cfg defined in Proposition 1.1.2 is called the correlation of f and g.
Now we investigate the possible existence of an operator which can be associated tothe correlation
Cf := Cff
for f ∈ H ⊗ S. Before doing this we recall some concepts and results of functionalanalysis. Let C : H → H be an operator on the real Hilbert space H. We can associate to
3

C the norm‖C‖ := sup
v∈H,‖v‖H=1
‖Cv‖H .
We say that a linear and bounded operator C on H is compact if there exists a sequence(Cn)n of finite rank operators such that
‖C − Cn‖ −→ 0.
The Spectral Theorem for compact and symmetric operators on a separable Hilbertspace states (see [2], Theorem 5.1)
Theorem 1.1.4. Let H be a separable real Hilbert space. Let C be a symmetric and compactoperator on H. Then for any v ∈ H
Cv =∑m∈J
λm〈v, em〉Hem
where (em)m form an orthonormal basis for H , (λm)m ⊂ R are the eigenvalues correspondingto the eigenvectors em of C and λm ↓ 0.
The notation λm ↓ 0 denotes a non-increasing sequence converging to 0.Define, for any orthonormal basis (em)m∈J , the trace of the non-negative definite sym-metric operator C as
Tr(C) :=∑m∈J〈Cem, em〉H .
Indeed it can be proved that this definition is independent on the choice of the basis inH , see for example [1]. We say that a non-negative definite symmetric compact operatoris trace class if Tr(C) < ∞. Equivalently by using the characterization of the SpectralTheorem, a non-negative definite symmetric compact operator is trace class if
∑m λm <
∞.We can now proceed to prove the following
Theorem 1.1.5. Let (H, 〈·, ·〉H) and (S, 〈·, ·〉S) be separable Hilbert spaces of the same di-mension and let (em)m∈J , (sm)m∈J be orthonormal bases of H and S, respectively. The mapΦ : Cf ∈ H ⊗H : f ∈ H ⊗S → C : C non-negative definite trace class operator given by
Φ(Cf )(v) = Φ
(∑m∈J
fm ⊗ fm
)(v) :=
∑m∈J〈fm, v〉Hfm ∈ H, v ∈ H (1.1.1)
is a one-to-one correspondence.
Proof. For f ∈ H ⊗ S we denote Φ(Cf ) by Cf . First we prove that indeed Cf has therequired properties. By definition we can immediately conclude that Cf is compact asit is a norm limit of finite-rank operators. Indeed if we define Cn :=
∑m≤n〈fm, ·〉Hfm
then‖Cf − Cn‖ ≤
∑m>n
‖fm‖2 → 0, n→∞.
4

We show that Cf is non-negative definite. Let v ∈ H, v 6= 0. Then
〈Cfv, v〉H =∑m∈J〈fm, v〉H〈fm, v〉H =
∑m∈J〈fm, v〉2H ≥ 0.
Now we check that Cf is a trace class operator. Namely plugging the expression for Cfinto the definition of trace,
Tr(Cf ) =∑m∈J〈Cfem, em〉H =
∑m∈J
∑n∈J〈fn, em〉H〈fn, em〉H =
∑n∈J
∑m∈J〈fn, em〉2H〈em, em〉H
=∑n∈J〈∑m∈J〈fn, em〉Hem,
∑m∈J〈fn, em〉Hem〉H =
∑n∈J‖fn‖2H = ‖f‖2H⊗S <∞.
Therefore we can conclude that Cf is a non-negative definite trace class operator.Now it remains to show that the map Φ is a one-to-one correspondence. Observe that
the following chain of equalities holds true for v, w ∈ H :
〈Cfv, w〉H =∑m∈J〈fm, v〉H〈fm, w〉H =
∑m∈J〈fm ⊗ fm, v ⊗ w〉H⊗H
= 〈∑m∈J
fm ⊗ fm, v ⊗ w〉H⊗H = 〈Cf , v ⊗ w〉H⊗H .(1.1.2)
We are going to check that our map is injective, i.e. Cf = Cg for f, g ∈ H ⊗ S impliesCf = Cg. Assuming that Cf = Cg we have by (1.1.2) that for all v, w ∈ H
〈Cf , v ⊗ w〉H⊗H = 〈Cg, v ⊗ w〉H⊗H .
By linearity we have also for all n ∈ N and for all vi, wi ∈ H
〈Cf ,n∑i=1
vi ⊗ wi〉H⊗H = 〈Cg,n∑i=1
vi ⊗ wi〉H⊗H
or equivalently
〈Cf − Cg,n∑i=1
vi ⊗ wi〉H⊗H = 0.
The claim is proved after observing that the set ∑n
i=1 vi ⊗ wi : vi, wi ∈ H,n ∈ N is adense subset in H ⊗H and therefore Cf − Cg = 0.
It remains to show that the map is also surjective. Let C be a non-negative definitetrace class operator. We want to show that there exist f ∈ H ⊗ S such that Cf = C. Let(φm)m∈J be the sequence of eigenvectors of C forming an orthonormal basis for H and(λm)m∈J ⊂ R+ be the eigenvalues of C, i.e.
Cφm = λmφm. (1.1.3)
Moreover∑
m λm <∞ as C is trace class. As a consequence we get convergence of thefollowing series
f =∑m∈J
√λmφm ⊗ sm.
5

For this element we have fm =√λmφm. Hence
Cf =∑m∈J
λmφm ⊗ φm.
Thus for all v ∈ H it holds that
Cfv =∑m∈J
λm〈φm, v〉Hφm.
From this we can state that the spectrum of Cf equals (1.1.3) and therefore Cf = C.
Corollary 1.1.6. Let (H, 〈·, ·〉H) be a separable Hilbert space and let C ∈ H ⊗ H be a corre-lation. Let C be defined by (1.1.1) with eigenpairs (λm, φm)m∈J . Then C can be representedas
C =∑m∈J
λmφm ⊗ φm. (1.1.4)
The following theorem is crucial for our purpose.
Theorem 1.1.7. Let (H, 〈·, ·〉H) and (S, 〈·, ·〉S) be separable Hilbert spaces of the same dimen-sion. Let (φm)m∈J be an orthnormal basis for H. Let C ∈ H ⊗H be a correlation representedas in (1.1.4). Let f ∈ H ⊗ S. Then Cf = C if and only if there exists an orthonormal family(Ym)m∈J ⊂ S such that
f =∑m∈J
√λmφm ⊗ Ym. (1.1.5)
Proof. Assume that there exists an orthonormal family (Ym)m∈J ⊂ S such that f =∑m
√λmφm ⊗ Ym. Then by Proposition 1.1.2 we can conclude the statement, possibly
after having completed the family (Ym)m∈J to a basis for S.On the other way around, assume that Cf = C. We have already observed at thebeginning of the section that we can represent the element f ∈ H ⊗ S as
f =∑m∈J
φm ⊗Xm (1.1.6)
where (Xm)m ⊂ S. Moreover we have the expansion
Xm =∑n∈J〈Xm, sn〉Ssn
for (sn)n∈J being an orthonormal basis of S. Thus we get
f =∑m∈J
φm ⊗Xm =∑m∈J
∑n∈J〈Xm, sn〉Sφm ⊗ sn.
6

If we call fn :=∑
m∈J〈Xm, sn〉Sφm we have
Cf =∑n
fn ⊗ fn
=∑n∈J
(∑m∈J〈Xm, sn〉S
)(∑m′∈J〈Xm′ , sn〉S
)φm ⊗ φm′
=∑
(m,m′)∈J×J
(∑n∈J〈Xm, sn〉S〈Xm′ , sn〉S
)φm ⊗ φm′
=∑
(m,m′)∈J×J
(∑n∈J〈Xm, sn〉S〈Xm′ , sn〉S〈sn, sn〉S
)φm ⊗ φm′
=∑
(m,m′)∈J×J
〈Xm, Xm′〉Sφm ⊗ φm′ .
If we compared the previous result with (1.1.4) we conclude that necessarily
〈Xm, Xm′〉S = λmδmm′ .
Therefore (Xm)m is an orthogonal family with ‖Xm‖2S = λm. Hence from (1.1.6) we get
the statement with Ym =Xm√λm
.
Definition 1.1.8. The representation (1.1.5) of f given the spectrum of Cf is called the Karhunen-Loève expansion of f.
1.1.2 Truncation of the Karhunen-Loève Expansion
For any element f ∈ H ⊗ S with a given correlation we have established the existenceof an expansion taking the form
f =∑m∈J
√λmφm ⊗ Ym
where (φm)m∈J and (Ym)m∈J are orthonormal systems and λm ↓ 0. Now we are in-terested in investigating the properties of such an expansion. In order to do that weintroduce the following standard notation: for U a closed subspace of H, PU will indi-cate the orthogonal projection of H onto U.
Theorem 1.1.9. If f ∈ H ⊗ S has the Karhunen-Loève expansion (1.1.5), then for any N ∈ Nit holds
infU⊂HUclosed
dimU=N
‖f − PU⊗Sf‖2H⊗S ≥∑
m≥N+1
λm, (1.1.7)
with equality in the case U = spanφ1, ..., φN.
7

Proof. If U = spanφ1, ..., φN then PU⊗Sf =N∑m=1
√λmφm⊗Ym which is exactly theN th
truncation of the Karhunen-Loève expansion. Thus
‖f − PU⊗Sf‖2H⊗S = ‖∑
m≥N+1
√λmφm ⊗ Ym‖2H⊗S
=∑
m≥N+1
λm〈φm ⊗ Ym, φm ⊗ Ym〉H⊗S
=∑
m≥N+1
λm‖φm ⊗ Ym‖2H⊗S =∑
m≥N+1
λm
and so we have equality in (1.1.7).We prove the first statement by induction. If N = 0 then (1.1.7) holds. Firstly observethat we are allowed to take (Ym)m∈J to be an orthonormal basis of S with J finite orcountable infinite. Let U ⊂ H be closed and such that dimU = N . Consider g ∈ U ⊗ S.Then we can represent g as
g =∑m∈J
u′m ⊗ Ym
where (u′m)m ⊂ U. It holds that
g =∑m∈J
√λmum ⊗ Ym
with um :=u′m√λm⊂ U . Using this we get
‖f − g‖2U⊗H = 〈f − g, f − g〉U⊗H= 〈∑m∈J
√λm(φm − um)⊗ Ym,
∑n∈J
√λn(φn − un)⊗ Yn〉U⊗H
=∑m∈J
∑n∈J
√λm√λn〈(φm − um)⊗ Ym, (φn − un)⊗ Yn〉U⊗H
=∑m∈J
∑n∈J
√λm√λn〈φm − um, φn − un〉H〈Ym, Yn〉S
=∑m∈J
λm‖φm − um‖2H . (1.1.8)
Consider spanu1, ..., uN−1 ⊂ U. If dim(spanu1, ..., uN−1) = N − 1 then
W := spanu1, ..., uN−1.
Otherwise if dim(spanu1, ..., uN−1) < N − 1 take
W := spanu1, ..., uN−1, φN , ..., φN+k
8

for some k ∈ N such that dimW = N − 1.We use the notation W⊥U for the space such that U = W ⊕⊥ (W⊥U ). Observe thatdim(W⊥U ) = 1 and therefore W⊥U = spane for some e ∈ U with ‖e‖H = 1. We have
‖f − g‖2U⊗H =∑
m≤N−1
λm‖φm − um‖2H +∑m≥N
λm‖φm − um‖2H
=∑
m≤N−1
λm‖φm − PWum‖2H +∑m≥N
λm‖φm − um‖2H+
+∑m≥N
λm‖φm − PWum‖2H −∑m≥N
λm‖φm − PWum‖2H
=∑m∈J
λm‖φm − PWum‖2H −∑m≥N
λm(‖φm − PWum‖2H − ‖φm − um‖2H)
(∗)≥∑m∈J
λm‖φm − PWum‖2H −∑m≥N
λm‖PW⊥U φm‖2H
=∑m∈J
λm‖φm − PWum‖2H −∑m≥N
λm〈e, φm〉2H
≥∑m∈J
λm‖φm − PWum‖2H − supm≥N
λm∑m≥N〈e, φm〉2H
≥∑m∈J
λm‖φm − PWum‖2H − λN‖e‖2H
=∑m∈J
λm‖φm − PWum‖2H − λN
where in the last inequality we have used Bessel’s inequality and the assumption thatthe sequence of eigenvalues is non-increasing. The inequality marked with (∗) holdstrue because
‖φm − PWum‖2H = ‖PWφm − PWum + PW⊥U φm‖2H
= ‖PW (φm − um) + PW⊥U φm‖2H
= ‖PW (φm − um)‖2H + ‖PW⊥U φm‖2H
≤ ‖φm − um‖2H + ‖PW⊥U φm‖2H .
By (1.1.2) for w =∑m∈J
√λmPWum ⊗ Ym ∈W ⊗ S we have
∑m∈J
λm‖φm − PWum‖2H − λN = ‖f − w‖2W⊗S − λN ≥ infh∈W⊗S
‖f − h‖2W⊗S − λN .
Thus we have shown
‖f − g‖2U⊗H ≥ infW⊂HW closed
dimW=N−1
infh∈W⊗S
‖f − h‖2W⊗S − λN .
9

Applying the inductive hypothesis we finally get
infU⊂HUclosed
dimU=N
infg∈U⊗S
‖f − g‖2U⊗H ≥ infW⊂HW closed
dimW=N−1
infh∈W⊗S
‖f − h‖2W⊗S − λN
≥∑m≥N
λm − λN
=∑
m≥N+1
λm.
1.2 The Karhunen-Loève Expansion of a Random Field
The main goal of this section is to specialize the results we have previously obtained tothe particular case of infinite-dimensional random fields.In the notation of the previous section, let H = L2(D) and S = L2
P (Ω). Let a ∈ L2P (Ω)⊗
L2(D) (i.e. a is a second order random field) with mean
Ea(x) :=
∫Ωa(ω,x)dP (ω)
and covariance function
Va(x,x′) :=
∫Ωa(ω,x)a(ω,x′)dP (ω)− Ea(x)Ea(x′)
=
∫Ω
[a(ω,x)− Ea(x)][a(ω,x′)− Ea(x′)]dP (ω).
Observe that Ea(x) ∈ L2(D) and Va(x,x′) ∈ L2(D)⊗ L2(D).Consider
a(ω,x) := a(ω,x)− Ea(x) ∈ L2P (Ω)⊗ L2(D).
Let (sm)m∈N and (en)n∈N be orthonormal bases for L2P (Ω) and L2(D), respectively. Ac-
cording to our discussion at the beginning of Section 1.1.1, we have the following rep-resentation
a =∑n∈N
∑m∈N
an,men ⊗ sm, (an,m) ∈ `2(N× N).
10

Define am :=∑n∈N
an,men ∈ L2(D). Now we verify that Ca as given in Definition 1.1.3
coincides with Va defined as above. Indeed if we identify awith an element ofL2(Ω×D)
Va(x,x′) =
∫Ωa(ω,x)a(ω,x′)dP (ω)
=
∫Ω
(∑n∈N
∑m∈N
an,men(x)sm(ω)
)(∑n′∈N
∑m′∈N
an′,m′en′(x′)sm′(ω)
)dP (ω)
=∑n∈N
∑m∈N
∑n′∈N
∑m′∈N
an,man′,m′en(x)en′(x′)
∫Ωsm(ω)sm′(ω)dP (ω)
=∑n∈N
∑m∈N
∑n′∈N
∑m′∈N
an,man′,m′en(x)en′(x′)δmm′
=∑m∈N
(∑n∈N
an,men(x)
)(∑n′∈N
an′,men′(x′)
)=∑m∈N
am(x)am(x′) = Ca.
Therefore Va is indeed the correlation of a.By Theorem 1.1.5 we can associate to Va a non-negative definite trace class operatorVa : L2(D) −→ L2(D) taking the form
(Vav)(x) =∑m∈N〈am, v〉L2(D)am(x)
=∑m∈N
(∫Dam(x′)v(x′)dx′
)am(x)
=
∫D
∑m∈N
am(x)am(x′)v(x′)dx′
=
∫DVa(x,x
′)v(x′)dx′. (1.2.1)
This is called the Carleman operator. In particular Va is compact and has an eigenpairssequence (λm, φm)∞m=1 such that
Vaφm = λmφm (1.2.2)
with the properties that the eigenvalues are non-negative real such that λm ↓ 0 and theeigenvectors (φm)m form an orthonormal sequence in L2(D).By Corollary 1.1.6 we have a representation for the covariance given by
Va(x,x′) =
∑m∈N
λmφm(x)φm(x′).
Finally we have the following equivalent formulation of Theorem 1.1.7:
11

Corollary 1.2.1. If a ∈ L2P (Ω) ⊗ L2(D), then there exists a sequence (Ym)m ⊂ L2
P (Ω) suchthat EYm = 0,Cov(Ym, Yn) = δmn for all m,n ∈ N and
a(ω,x) = Ea(x) +∑m∈N
√λmφm(x)Ym(ω) (1.2.3)
where (λm)m and (φm)m are the eigenvalues and eigenvectors of the Carleman operator Vadefined in (1.2.1). Moreover
Ym(ω) =1√λm
∫D
[a(ω,x)− Ea(x)]φm(x)dx.
Definition 1.2.2. Decomposition (1.2.3) is called the Karhunen-Loève expansion of the randomfield a.
In this context the analogue of Theorem 1.1.9 states that
Corollary 1.2.3. If a ∈ L2P (Ω) ⊗ L2(D) has the Karhunen-Loève expansion (1.2.3), then for
any N ∈ N it holds ∥∥∥∥∥a−N∑m=1
√λmφmYm
∥∥∥∥∥2
L2P (Ω)⊗L2(D)
=∑
m≥N+1
λm. (1.2.4)
1.2.1 More on Convergence of the Karhunen-Loève Expansion
Under certain conditions it can be shown that that the convergence of the truncatedKarhunen-Loève expansion is inL∞(Ω×D).Namely assuming that the sequence (Ym)mis uniformly bounded in L∞(Ω) and
∑m
√λm‖φm‖L∞(D) converges, we have∥∥∥∥∥a−
N∑m=1
√λmφmYm
∥∥∥∥∥L∞(Ω×D)
≤ C∑
m≥N+1
√λm ‖φm‖L∞(D) (1.2.5)
where the constant C is independent of N. We will use this important observation inSection 4.2.1 where we analyse the overall error of the stochastic collocation method.Therefore inspired by the bound (1.2.5), we are interested in studying the eigenvaluedecay and point-wise eigenfunction bounds. The results we are going to present arestrictly related to the regularity of the covariance Va as stated in the following
Definition 1.2.4. Let p, q ∈ [0,∞). A covariance function Va : D × D −→ R is said to bepiecewise analytic (respectively smooth and Hp,q) if there exists a finite partition D = DjKj=1
of D into simplices Dj and there exists a finite family G = GjKj=1 of open sets in Rd such that
D =
K⋃j=1
Dj , Dj ⊂ Gj , ∀j = 1, ...,K
and such that Va|Dj×Dj′ has an extension toGj×Gj′ which is analytic inGj×Gj′ (respectivelysmooth in Gj ×Gj′ and is in (Hp(Gj)⊗ L2(D)) ∩ (Hq(Gj′)⊗ L2(D))) for any pair (j, j′).
12

We refer the reader to [14, Section 2.2] for a proof of the following result.
Proposition 1.2.5. Let Va ∈ L2(D ×D) and let λm as in (1.2.2).
1) If Va is piecewise analytic, then the eigenvalues satisfy
λm ≤ C1e−C2m1/d
, ∀m
for some constants C1, C2 > 0 depending only on Va.
2) If Va is piecewise Hk,0, then the eigenvalues satisfy
λm ≤ C3m−k/d, ∀m
for a constant C3 > 0 depending only on Va.
3) If Va is piecewise smooth, then the eigenvalues satisfy
λm ≤ C4m−s, ∀m
for any s > 0 with a constant C4 > 0 depending only on Va and s.
4) If Va is a Gaussian covariance function taking the form Va(x,x′) = σ2e
− |x−x′|2
γ2diam(D)2 forσ, γ > 0 called standard deviation and correlation length, respectively, then the eigenval-ues satisfy
λm ≤ C5σ2
γ2
(1/γ)m1/d
Γ(0.5m1/d), ∀m
where Γ(·) denotes the Gamma function and C5 > 0 is independent of m.
The proof of the following proposition can be found in [14, Section 2.3].
Proposition 1.2.6. Let Va ∈ L2(D ×D) and let φm as in (1.2.2).
1) If Va is piecewise Hk,0, then φm ∈ Hk(Dj) for all Dj ∈ D and for every ε ∈ (0, k− d/2]there exists a constant C6 = C6(ε, k) > 0 such that
‖φm‖L∞(D) ≤ C6λ−(d/2+ε)/km , ∀m.
2) If Va is piecewise smooth, for any s > 0 there exists a constant C7 = C7(s, d) > 0 suchthat
‖φm‖L∞(D) ≤ C7λ−sm , ∀m.
Combining Propositions 1.2.5 and 1.2.6 we finally get control on the series (1.2.5).
Corollary 1.2.7. If Va is piecewise Hk,0, then φm ∈ Hk(Dj) for all Dj ∈ D and√λm ‖φm‖L∞(D) ≤ Km
−s
where s = 12d(k− d− 2ε) for an arbitrary ε ∈ (0, 1
2(k− d)] and the constant K is independentof m.
13


2 Problem Setting
2.1 Strong and Weak Formulations
For d ∈ N, let D ⊂ Rd be a bounded Lipschitz domain and (Ω,F , P ) be a completeprobability space. Let a, f : Ω × D → R be known random functions. Our modelproblem is an elliptic partial differential equation with random coefficients and it takesthe form: P -a.s.
−∇ · (a(ω,x)∇u(ω,x)) = f(ω,x), x ∈ Du(ω,x) = 0, x ∈ ∂D
(2.1.1)
where the gradient operator ∇ is taken with respect to x. The main goal is to find arandom field u : Ω ×D → R which satisfies the above problem. As we will see, undercertain assumptions on a and f , it is relatively easy to show that such solution existsand it is unique. On the other hand no explicit expression of u is known in general.Thus we aim to approximate numerically the solution to (2.1.1).
Consider the Hilbert space L2P (Ω) of square integrable functions with respect to P
with the usual norm and the Hilbert space H10 (D) of H1(D)-functions vanishing at the
boundary of D in a trace sense, equipped with the norm
‖φ‖2H10 (D) =
∫D|∇φ(x)|2dx.
In what follows we are going to make several assumptions:
(A1) a ∈ L2P (Ω)⊗ L2(D) with mean and covariance function defined as:
Ea(x) :=
∫Ωa(ω,x)dP (ω), Va(x,x
′) :=
∫Ωa(ω,x)a(ω,x′)dP (ω)− Ea(x)Ea(x′).
(A2) a is uniformly bounded from below:
∃ amin > 0 : P (ω ∈ Ω : a(ω,x) > amin ∀x ∈ D) = 1.
(A3) f ∈ L2P (Ω)⊗ L2(D) with mean and covariance function defined as:
Ef (x) :=
∫Ωf(ω,x)dP (ω), Vf (x,x′) :=
∫Ωf(ω,x)f(ω,x′)dP (ω)− Ef (x)Ef (x′).
In this framework we deal with stochastic functions living on a domain which is theCartesian product of spatial and probabilistic domains. For this reason the choice of
15

tensor product spaces is natural. In particular we focus on the tensor product Hilbertspace VP := L2
P (Ω)⊗H10 (D) endowed with the inner product
〈v, w〉VP = E∫D∇v(ω,x) · ∇w(ω,x)dx.
Moreover we introduce the subspace
VP,a :=
v ∈ VP : E
∫Da(ω,x)|∇v(ω,x)|2dx <∞
with the norm ‖v‖2VP,a = E
∫D a(ω,x)|∇v(ω,x)|2dx. Observe that due to (A2) we have
the continuous embedding VP,a → VP with
‖v‖VP ≤1
√amin‖v‖VP,a . (2.1.2)
Define the bilinear form B : VP × VP → R and the linear functional F : VP → R asfollows
B(w, v) := E∫Da(ω,x)∇w(ω,x) · ∇v(ω,x)dx, F (v) := E
∫Df(ω,x)v(ω,x)dx.
We can now reformulate problem (2.1.1) in a variational form: find u ∈ VP such that
B(u, v) = F (v), ∀ v ∈ VP . (2.1.3)
We show in a moment that problem (2.1.3) is well-posed in the sense that a solutionexists and it is unique. More precisely if we can prove thatB is continuous and coerciveand F is continuous, then by the Lax-Milgram Theorem we have the claim (see [9],Theorem 2.7.7). In the proof of this result we will use Poincaré’s inequality:
‖v‖L2(D) ≤ CP ‖∇v‖L2(D), ∀ v ∈ H10 (D). (2.1.4)
Lemma 2.1.1. Under assumptions (A2) and (A3), problem (2.1.3) admits a unique solutionu ∈ VP such that
‖u‖VP ≤CPamin‖f‖L2
P (Ω)⊗L2(D).
Proof. Holder’s inequality applied twice gives that
|B(u, v)| ≤ ‖u‖VP,a‖v‖VP,a
and therefore B is continuous with continuity constant equal to 1.It is straightforward to show also that
B(v, v) = ‖v‖2VP,a
16

which in turn gives coerciveness with constant equal to 1.For what concerns the continuity of F we have
|F (v)| = |E∫Dfvdx| ≤ E
∫D|fv|dx ≤ E[‖f‖L2(D)‖v‖L2(D)]
≤ CPE[‖f‖L2(D)‖∇v‖L2(D)] ≤CP√amin
E[‖f‖L2(D)‖√a∇v‖L2(D)]
≤ CP√amin
(E[‖f‖2L2(D)])1/2‖v‖VP,a
=CP√amin‖f‖L2
P (Ω)⊗L2(D)‖v‖VP,a
where we have used Holder’s inequality again and Poincaré’s inequality (2.1.4). Thus,by assumption (A3), F is continuous with continuity constant CP√
amin‖f‖L2
P (Ω)⊗L2(D).
Having shown continuity of B and F and coerciveness of B, the first part of the lemmais then proved by applying the Lax-Milgram Theorem and the fact that VP,a → VP .
It remains to show that the estimate in the statement holds. We have
‖u‖VP ≤1
amin
(∫DE[a2|∇u|2]dx
)1/2
≤ CPamin
(∫DE[(∇ · (a∇u))2]dx
)1/2
=CPamin
(∫DE[f2]dx
)1/2
=CPamin‖f‖L2
P (Ω)⊗L2(D)
where the first inequality comes from (A2) and the second one from (2.1.4).
2.2 Finite-Dimensional Stochastic Space
In order to deal with the infinite-dimensional problem (2.1.3) we aim to replace thecoefficients by finite-dimensional counterparts which can be treated numerically. Moreprecisely we consider a new problem whose coefficients depend only on a finite numberN of random variables. We have shown in Chapter 1 that we can decompose a randomfield with the Karhunen-Loève expansion and we can consider a finite-dimensionaltruncation of this last one. Hence we choose the new coefficient
aN (ω,x) = Ea(x) +N∑m=1
√λmφm(x)Ym(ω)
which converges to a(ω,x) in the space L2P (Ω)⊗L2(D). A similar result holds for f. We
emphasize the dependence on the random variables Ym’s introducing the notation
aN (ω,x) = aN (Y1(ω), ..., YN (ω),x), fN (ω,x) = fN (Y1(ω), ..., YN (ω),x)
where (Ym)Nm=1 are real valued with EYm = 0 and Cov(Ym, Yn) = δmn (see Corollary4.1.4). The new problem is then to find uN ∈ VP such that
E∫DaN (ω,x)∇uN (ω,x) · ∇v(ω,x)dx = E
∫DfN (ω,x)v(ω,x)dx, ∀v ∈ VP . (2.2.1)
17

Observe that by the Doob-Dynkin Lemma (see [3], Theorem 20.1) it holds true that alsothe function uN depends on the same random variables, i.e.
uN (ω,x) = uN (Y1(ω), ..., YN (ω),x).
With this characterization the infinite-dimensional probability space Ω has been sub-stituted by an N -dimensional one. We underline the fact that aN and fN are inexactrepresentations of the coefficients appearing in (2.1.3) and therefore the solution uNwill also be an approximation of the exact solution u and the truncation error u − uNhas to be estimated (see Section 4.2.1).
We will adopt the following notation. Let Γm := Ym(Ω) ⊂ R which can be eitherbounded or unbounded. Define
Γ :=N∏m=1
Γm.
Moreover let assume that the random variables Y1, ..., YN have joint probability densityfunction ρ : Γ −→ R+.We now consider the tensor product space
Vρ = L2ρ(Γ)⊗H1
0 (D).
Introducing the new notation we can reformulate problem (2.2.1) as follows: find uN ∈Vρ such that∫
Γ
∫DaN (y,x)∇uN (y,x) · ∇vN (y,x)ρ(y)dxdy
=
∫Γ
∫DfN (y,x)vN (y,x)ρ(y)dxdy, ∀vN ∈ Vρ.
(2.2.2)
We can equivalently consider uN , aN and fN as functions
uN , aN , fN : Γ −→ H10 (D).
The analogue of problem (2.2.2) is then find uN ∈ Vρ such that∫DaN (y)∇uN (y) · ∇ψ(x)dx =
∫DfN (y)ψ(x)dx, ∀ψ ∈ H1
0 (D), ρ-a.e. in Γ. (2.2.3)
Remark 1. The use of the finite-dimensional truncation of the Karhunen-Loève expansion hasturned the stochastic problem (2.1.3) into the deterministic parametric elliptic problem (2.2.3)with an N -dimensional parameter.
18

3 The Stochastic Collocation Method
The stochastic collocation method aims to approximate numerically the solution uN toproblem (2.2.3). We follow [11] in the description of the method. It is based on stan-dard finite element approximations in the spaceH1
0 (D) whereD is a bounded Lipschitzdomain and a collocation, in the space L2
ρ(Γ), on a tensor grid built upon the zeros ofpolynomials orthogonal with respect to the joint probability density function of therandom variables Y1,...,YN .
3.1 Full Tensor Grid of Collocation Points
We seek an approximation in the finite-dimensional tensor space Vp,h := Pp(Γ)⊗Sqh(D)where:
• Sqh(D) ⊂ H10 (D) is a finite element space of dimension Nh containing piecewise
polynomials of degree q on a uniform triangulation Th with mesh size h.
• Pp(Γ) ⊂ L2ρ(Γ) is the span of tensor product polynomials with degree p = (p1, ..., pN ),
i.e. Pp(Γ) :=N⊗m=1Ppm(Γm) where for each m ∈ 1, ..., N
Ppm(Γm) := spanyim : i = 0, ..., pm.
Hence Np := dim(Pp(Γ)) =N∏m=1
(pm + 1).
The first step in the approximating process consists in choosing a set of collocationpoints and applying Lagrange interpolation to uN at those points. One way to do sois by using a full tensor grid interpolation operator. The evaluation points are chosento be the roots of polynomials which are orthogonal with respect to a certain auxiliarydensity function. Standard probability density functions, such as Gaussian or uniform,lead to well known Gauss quadrature nodes and weights. Recall that in general therandom variables Ym’s are uncorrelated but not independent and therefore the jointprobability density function ρ does not factorize. In this case we introduce ρ : Γ → R+
such that
ρ(y) =N∏m=1
ρm(ym),
∥∥∥∥ρρ∥∥∥∥L∞(Γ)
<∞. (3.1.1)
See Section 4.1 for conditions on the existence of ρ.For each m ∈ 1, ..., N, we denote by ym,km
pm+1km=1 ⊂ Γpm+1
m the roots of the non-trivial
19

polynomial qpm+1 ∈ Ppm+1(Γm) such that for any v ∈ Ppm(Γm)∫Γm
qpm+1(ym)v(ym)ρm(ym) = 0.
We consider the tensorized grid of collocation points
Y := yk = (ym,km)Nm=1 : 1 ≤ km ≤ pm + 1.
We order this set introducing the following index associated to the vector k = (k1, ..., kN ) :
k := k1 +N−1∑i=1
(ki+1 − 1)∏j≤i
(pj + 1).
More precisely we introduce the bijection
Ψ : k = (k1, ..., kN ) : km ∈ 1, ..., pm + 1 −→ 1, 2, ..., Np, Ψ(k) = k.
Then we denote by yk the collocation point yk = (y1,Ψ−1(k)1, ..., yN,Ψ−1(k)N ).
We define the full tensor Lagrange interpolant I full : C0(Γ;H10 (D))→ Pp(Γ)⊗H1
0 (D),
I fullv(y,x) =∑yk∈Y
v(yk,x)`k(y)
where `k(y) =N∏m=1
`m,km(ym) and `m,km ∈ Ppm(Γm), `m,km(ym) =pm+1∏i=1i 6=km
ym − ym,iym,km − ym,i
.
Note that `m,j(ym,i) = δji for j, i = 1, ..., pm + 1 and consequently `k(yj) = δkj.Equivalently by using the global index notation we get
I fullv(y,x) =
Np∑k=1
v(yk,x)`k(y) (3.1.2)
where `k(y) =N∏m=1
`m,Ψ−1(k)m(ym).
By defining one-dimensional interpolants Ipm : C0(Γm;H10 (D))→ Ppm(Γm)⊗H1
0 (D),
Ipmv(ym,x) =
pm+1∑km=1
v(ym,km ,x)`m,km(ym) (3.1.3)
we have the equivalent formulation I full =N⊗m=1Ipm .
The semi-discrete approximation in the stochastic domain is obtained by applying theoperator I full to uN , the solution to problem (2.2.3):
uN,p = I fulluN ∈ Pp(Γ)⊗H10 (D).
20

The second step in the approximating procedure consists in projecting the semi-approximation uN,p onto the finite element space Sqh(D). We may do this using theGalerkin method and we get the final approximation uN,p,h : Pp(Γ)→ Sqh(D) satisfying∫
DaN (y)∇uN,p,h(y) · ∇ψh(x)dx =
∫DfN (y)ψh(x)dx ∀ψh ∈ Sqh(D), ∀y ∈ Y.
The main goal of the implementations in Chapter 5 will be to approximate the statis-tics of the solution u to problem (2.1.3). Therefore we explain how to recover the ex-pected value of the final approximation uN,p,h.We define the Gauss quadrature weights
ωm,km :=
∫Γm
`2m,km(ym)ρm(ym)dym, ωk =
N∏m=1
ωm,Ψ−1(k)m . (3.1.4)
Given these weights, we introduce the following Gauss quadrature formula (see [11],(2.3))
Eρ(uN,p,h)(x) = Eρ[I fulluN,h(y,x)
]= Eρ
Np∑k=1
uN,h(yk,x)`k(y)
=
Np∑k=1
uN,h(yk,x)ωk
(3.1.5)
where uN,h(yk,x) ∈ Sqh(D) indicates the finite element solution of the problem withcoefficients evaluated at point yk.
Remark 2. The stochastic collocation method is equivalent to solve Np deterministic problems.Note that each of these problems is naturally decoupled. On the other hand Np grows expo-nentially in the number N of random variables giving place to a huge computational work, theso-called curse of dimensionality.
3.2 Sparse Tensor Grid of Collocation Points
We propose an alternative to the approach described in the previous section based ona different choice of the collocation points. We construct the grid by the Smolyak al-gorithm as described in [11] and [12]. The main goal is to keep the number of pointsmoderate.Let i ∈ N+ be a positive integer denoting the level of approximation and t : N+ → N+
an increasing function denoting the number of collocation points used to build the ap-proximation at level iwith t(1) = 1. In this context form = 1, ..., N the one-dimensionalinterpolation operator It(i)m : C0(Γm;H1
0 (D))→ Pt(i)−1(Γm)⊗H10 (D) takes the form
It(i)m v(ym,x) =
t(i)∑km=1
v(ym,km ,x)`m,km(ym). (3.2.1)
21

Here similarly as before ym,kmt(i)km=1 are the roots of the polynomial qm,t(i) ∈ Pt(i)(Γm)
orthogonal to Pt(i)−1(Γm) with respect to ρm.We introduce the difference operators
∆t(i)m =
It(i)m − It(i−1)
m , i ≥ 2
It(i)m , i = 1.
Given a multi-index i = (i1, ..., iN ) ∈ NN+ we consider a function g : NN+ → N strictlyincreasing in each argument. Let w ∈ N. Then the isotropic sparse grid approxi-mation uN,p,h is obtained by projecting onto the finite element space Sqh(D) the semi-approximation uN,p = St,gw uN where
St,gw =∑
i∈NN+g(i)≤w
N⊗m=1
∆t(im)m . (3.2.2)
For |j| =∑N
m=1 jm, the following equivalent formulation can be proved by induction:
St,gw =∑
i∈NN+g(i)≤w
∑j∈0,1Ng(i+j)≤w
(−1)|j|N⊗m=1
It(im)m . (3.2.3)
Therefore the sparse grid approximation can be seen as a linear combination of full ten-sor product interpolations and the sparse grid Ysparse ⊂ Γ is obtained as a superpositionof all full tensor grids used in (3.2.3) which correspond to non-zero coefficients. Namely
Ysparse =⋃
i∈NN+g(i)≤w
⋃j∈0,1Ng(i+j)≤w
(Yt(i1) × · · · × Yt(iN )
)(3.2.4)
where Yt(im) ⊂ Γm denotes the grid of points used by It(im)m . Recall that the full tensor
product grid is obtained asY = Yp1 × · · · × YpN
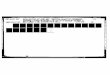
with Ypm ⊂ Γm the grid of points used by Ipm . So the choice of w and g in the sparseconstruction is driven by the idea to reduce the number of non-zero terms in (3.2.4).Figure 3.2.1 shows the significant difference between a full grid and a sparse grid.
The good effectiveness of the sparse collocation method strongly relies on the properselection of the functions t and g. A typical choice which leads to the isotropic Smolyakalgorithm is
t(i) =
1, i = 1
2i−1 + 1, i ≥ 2, g(i) =
N∑m=1
(im − 1). (3.2.5)
22

Figure 3.2.1: A full tensor product grid and a sparse tensor product grid for Γ = [−1, 1]2
both with maximum polynomial degree in each direction equal to 33.
On the other hand it is interesting to notice that the full tensor product method is re-covered when we consider
t(i) = i, g(i) = max1≤m≤N
(im − 1).
The advantage of the sparse tensor product grid over the full tensor product grid canalready be seen for a 2-dimensional stochastic domain (see Figure 3.2.2).
Since in general the function t is non surjective we define a left-inverse given by
t−1(k) := mini ∈ N+ : t(i) ≥ k.
Note that t−1(t(i)) = i and t(t−1(k)) ≥ k. Let t(i) = (t(i1), ..., t(iN )) and consider thefollowing set
Θ = p ∈ NN : g(t−1(p + 1)) ≤ w.
It is not hard to see that the Smolyak functions (3.2.5) give rise to
Θ =
p ∈ NN :
N∑m=1
f(pm) ≤ w
, f(pm) =
0, pm = 0
1, pm = 1
dlog2(pm)e, pm ≥ 2
. (3.2.6)
Define the polynomial space
PΘ(Γ) := span
N∏m=1
ypmm : p = (p1, ..., pN ) ∈ Θ
.
ThenSt,gw uN ∈ PΘ(Γ)⊗H1
0 (D).
23

Figure 3.2.2: A comparison between the number of collocation points in a full grid anda sparse grid for N = 2. We plot the log of the number of points versus themaximum number of points tmax employed in each direction.
Similarly to the previous section, we describe how to compute the first moment ofthe final approximation uN,p,h. For the Smolyak algorithm, it can be shown (see [12],formula (3.9)) that
Eρ(uiN,p,h)(x) =∑i∈NN+
w+1≤|i|≤w+N
(−1)w+N−|i|(
N − 1
w +N − |i|
)Eρ
[N⊗m=1
It(im)m uiN,h(ym,x)
]
(3.2.7)
and from (3.1.5)
Eρ
[N⊗m=1
It(im)m uiN,h(ym,x)
]=
Nt(i)∑k=1
uiN,h(yk,x)ωk
where ωk are the same as in (3.1.4) and again uN,h(yk,x) is the finite element solutionof the problem with coefficients evaluated at point yk.
3.2.1 Anisotropic Version
It is possible to construct an even refined algorithm acting differently on each direc-tion ym. This may be useful in situations where the convergence rate is poor in some
24

directions with respect to others. This anisotropy can be described introducing someweights α = (α1, ..., αN ) in the function g. One possible choice can be for instance
g(i;α) :=N∑m=1
αmαmin
(im − 1), αmin := min1≤m≤N
αm.
Consequently the corresponding anisotropic sparse interpolation operator takes theform
St,gw,α =∑
i∈NN+g(i;α)≤w
N⊗m=1
∆t(im)m .
Observe that the isotropic Smolyak method described in the previous section is aspecial case of the anisotropic formula when we take all the components of the weightvector to be equal, i.e. α1 = ... = αN .
We will see in the next chapter (cf. Section 4.4) how the selection of weights is relatedto the analytic dependence of the solution uN with respect to each of the random vari-ables Ym. The key idea is to place more points in those directions where the convergencerate in the random domain is slower.
25


4 Convergence of the Method
Before studying the convergence of the stochastic collocation method we need to im-pose some more requirements on the data of the problem which in turn, as we will see,imply regularity of the stochastic behaviour of the solution uN to problem∫
DaN (y)∇uN (y) · ∇ψ(x)dx =
∫DfN (y)ψ(x)dx, ∀ψ ∈ H1
0 (D), ρ-a.e. in Γ. (4.0.1)
The results presented in this chapter can be partially found in [11].In the following section for convenience we drop the subscript N which indicates thefinite-dimensional noise dependence.
4.1 Regularity Results
We introduce the following weight σ : Γ → R+ which allows to keep control on theexponential growth at infinity of some function:
σ(y) =
N∏m=1
σm(ym), σm(ym) =
1, Γm is boundede−αm|ym|, Γm is unbounded
for some αm > 0. We consider the corresponding functional space
C0σ(Γ;V ) =
v : Γ→ V, v continuous in y,max
y∈Γσ(y)‖v(y)‖V <∞
where V is an Hilbert space defined on D. As we have announced at the beginning ofthe chapter, we make the following assumptions on the data of problem (2.2.3):
(A4) f ∈ C0σ(Γ;L2(D)).
(A5) The joint probability density function ρ is such that ∀y ∈ Γ,
ρ(y) ≤ Cρe−∑Nm=1(δmym)2
(4.1.1)
for some Cρ > 0 and δm = 0 in the case Γm is bounded and δm > 0 when Γm isunbounded.
We have remarked in Section 3.1 that we need to introduce an auxiliary probabilitydensity function satisfying (3.1.1). The following condition is sufficient
C(m)mine
−(δmym)2 ≤ ρm(ym) < C(m)maxe
−(δmym)2, ∀ym ∈ Γm
27

for some constants C(m)min , C
(m)max > 0 which do not depend on ym. Then (3.1.1) holds with∥∥∥∥ρρ∥∥∥∥L∞(Γ)
≤ CρCmin
, Cmin :=N∏m=1
C(m)min .
Under the previous assumptions the following continuous embeddings hold true:
C0σ(Γ;V ) → L2
ρ(Γ;V ) → L2ρ(Γ;V ).
Indeed we have
‖v‖L2ρ(Γ;V ) ≤
∥∥∥∥ρρ∥∥∥∥1/2
L∞(Γ)
‖v‖L2ρ(Γ;V ) ≤
(CρCmin
)1/2
‖v‖L2ρ(Γ;V ) (4.1.2)
proving continuity of the second embedding. For the first one we have
‖v‖2L2ρ(Γ;V ) =
∫Γ(σ(y)‖v(y)‖V )2 ρ(y)
σ2(y)dy ≤ ‖v‖2C0
σ(Γ;V )
∫Γ
ρ(y)
σ2(y)dy
= ‖v‖2C0σ(Γ;V )
N∏m=1
∫Γm
ρm(ym)
σ2m(ym)
dym.
Denote withMm :=∫
Γm
ρm(ym)
σ2m(ym)
dym.We have two possible cases. If Γm is bounded then
σm(ym) = 1 and δm = 0 and therefore
Mm =
∫Γm
ρm(ym)dym ≤∫
Γm
C(m)maxe
−(0·ym)2dym = C(m)
max|Γm|
where |Γm| denotes the volume of Γm.On the other hand if Γm is unbounded then σm(ym) = e−αm|ym| and δm > 0. Thus
Mm =
∫Γm
ρm(ym)e2αm|ym|dym =
∫Γm
ρm(ym)(e−δ
2my
2m+2αm|ym|
)eδ
2my
2mdym
≤ C(m)max
∫Γm
(e−δ
2my
2m+2αm|ym|
)dym
≤ C(m)max
∫Γm
(e−δ2
my2m+
2α2m
δ2m+δ2my
2m
2
)dym
= C(m)max
√2π
δme
(√2αmδm
)2
.
Hence C0σ(Γ;V ) is continuously embedded in L2
ρ(Γ;V ) for either Γm bounded or un-bounded.
Lemma 4.1.1. If f ∈ C0σ(Γ;L2(D)) and a is uniformly bounded from below by amin > 0, then
the solution to (4.0.1) is such that u ∈ C0σ(Γ;H1
0 (D)).
28

Proof. By the definition of the functional space C0σ(Γ;H1
0 (D)) we have
‖u‖C0σ(Γ;H1
0 (D)) = supy∈Γ
σ(y)‖u(y)‖H10 (D) = sup
y∈Γσ(y)‖∇u(y)‖L2(D)
≤ 1
aminsupy∈Γ
σ(y)‖a(y)∇u(y)‖L2(D)
≤ CPamin
supy∈Γ
σ(y)‖f(y)‖L2(D)
=CPamin‖f(y)‖C0
σ(Γ;L2(D))
where in the second inequality we have used Poincaré’s inequality.
The last result we prove before investigating the convergence of the stochastic collo-cation method concerns a kind of regularity of the solution u in the random domain.For later convenience we introduce the following notation.
Γ∗m :=
N∏j=1j 6=m
Γj , y∗m := (y1, ..., ym−1, ym+1, ..., yN ) ∈ Γ∗m.
Similarly we write
ρ∗m :=N∏j=1j 6=m
ρj , σ∗m :=N∏j=1j 6=m
σj .
With slight abuse of notation we write v(y,x) = v(ym,y∗m,x) for any m = 1, ..., N.
Lemma 4.1.2. Assume that for every y ∈ Γ and any m ∈ 1, ..., N there exists γm < ∞such that for all k ∈ N∥∥∥∥∥∂kyma(y)
a(y)
∥∥∥∥∥L∞(D)
≤ γkmk!,
∥∥∂kymf(y)∥∥L2(D)
1 + ‖f(y)‖L2(D)≤ γkmk!.
Then the solution u(ym,y∗m,x) to problem (4.0.1) as a function u : Γm → C0
σ∗m(Γ∗m;H1
0 (D))admits an analytic extension u(z,y∗m,x) in the region
Σ(Γm; τm) := z ∈ C : dist(z,Γm) ≤ τm ⊂ C
with 0 < τm <1
2γm. Moreover for all z ∈ Σ(Γm; τm)
σm(<z)‖u(z)‖C0σ∗m
(Γ∗m;H10 (D)) ≤
CP eαmτm
2amin(1− 2τmγm)(1 + 2‖f‖C0
σ(Γ;L2(D)))
where CP is the constant appearing in Poincaré’s inequality (2.1.4).
29

Proof. Consider the weak problem (4.0.1) which, after suppressing subscripts, takes theform ∫
Da(y)∇u(y) · ∇ψ(x)dx =
∫Df(y)ψ(x)dx, ∀ψ ∈ H1
0 (D), ρ-a.e. in Γ.
Differentiating k times with respect to ym and using Leibniz’s product rule we end upwith
k∑l=0
(k
l
)∫D
(∂lyma(y))∇∂k−lym u(y) · ∇ψ(x)dx =
∫D
(∂kymf(y))ψ(x)dx
and reordering terms we obtain∫Da(y)∇∂kymu(y)·∇ψ(x)dx =
−k∑l=1
(k
l
)∫D
(∂lyma(y))∇∂k−lym u(y) · ∇ψ(x)dx +
∫D
(∂kymf(y))ψ(x)dx.
Setting ψ = ∂kymu and dropping the variable dependence, we get
∫Da|∇∂kymu|
2 = −k∑l=1
(k
l
)∫D
(∂lyma)∇∂k−lym u · ∇∂kymu+
∫D
(∂kymf)∂kymu.
Thus
‖√a∇∂kymu‖
2L2(D) = −
k∑l=1
(k
l
)∫D
∂lyma
a(√a∇∂k−lym u) · (
√a∇∂kymu) +
∫D
(∂kymf)∂kymu
≤k∑l=1
(k
l
)∥∥∥∥∥∂lymaa∥∥∥∥∥L∞(D)
∣∣∣∣∫D
(√a∇∂k−lym u) · (
√a∇∂kymu)
∣∣∣∣+
∣∣∣∣∫D
(∂kymf)∂kymu
∣∣∣∣ .Applying Holder’s inequality to the terms in absolute value, we have
‖√a∇∂kymu‖
2L2(D) ≤
k∑l=1
(k
l
)∥∥∥∥∥∂lymaa∥∥∥∥∥L∞(D)
‖√a∇∂k−lym u‖L2(D)‖
√a∇∂kymu)‖L2(D)+
+ ‖∂kymf‖L2(D)‖∂kymu‖L2(D).
30

Dividing both sides by ‖√a∇∂kymu‖L2(D) and recalling assumption (A2), it holds
‖√a∇∂kymu‖L2(D) ≤
k∑l=1
(k
l
)∥∥∥∥∥∂lymaa∥∥∥∥∥L∞(D)
‖√a∇∂k−lym u‖L2(D)+
+ ‖∂kymf‖L2(D)
‖∂kymu‖L2(D)
‖√a∇∂kymu‖L2(D)
≤k∑l=1
(k
l
)∥∥∥∥∥∂lymaa∥∥∥∥∥L∞(D)
‖√a∇∂k−lym u‖L2(D)+
+ ‖∂kymf‖L2(D)
‖∂kymu‖L2(D)√amin‖∇∂kymu‖L2(D)
.
Application of Poincaré’s inequality gives
‖√a∇∂kymu‖L2(D) ≤
k∑l=1
(k
l
)∥∥∥∥∥∂lymaa∥∥∥∥∥L∞(D)
‖√a∇∂k−lym u‖L2(D)
+ ‖∂kymf‖L2(D)CP√amin
‖∂kymu‖L2(D)
‖∂kymu‖L2(D)
=
k∑l=1
(k
l
)∥∥∥∥∥∂lymaa∥∥∥∥∥L∞(D)
‖√a∇∂k−lym u‖L2(D)
+CP√amin‖∂kymf‖L2(D). (4.1.3)
Let define Rk :=‖√a∇∂kymu‖L2(D)
k!. Using the bounds in the assumption of the lemma
it holds true that
Rk ≤k∑l=1
γlmRk−l +CP√amin
γkm(1 + ‖f‖L2(D)). (4.1.4)
By induction we are going to prove that the following relation holds:
Rk ≤1
2(2γm)k
(R0 +
CP√amin
(1 + ‖f‖L2(D))
). (4.1.5)
For convenience set the constant C := CP√amin
(1 + ‖f‖L2(D)). It is easily verified that for
31

k = 1, (4.1.5) follows from (4.1.4). Now suppose (4.1.5) holds true for k > 1. Then
Rk+1 ≤k+1∑l=1
γlmRk+1−l + γk+1m C =
k∑l=1
γlmRk+1−l + γk+1m R0 + γk+1
m C
≤k∑l=1
γlm1
2(2γm)k+1−l(R0 + C) + γk+1
m (R0 + C)
=1
2(2γm)k+1(R0 + C)
k∑l=1
2−l + γk+1m (R0 + C)
=1
2(2γm)k+1(R0 + C)
(1− 1
2k
)+ γk+1
m (R0 + C)
=1
2(2γm)k+1(R0 + C).
Observe that (4.1.3) gives for k = 0
R0 = ‖√a∇u‖L2(D) ≤
CP√amin‖f‖L2(D).
Moreover
Rk ≥√amin‖∇∂kymu‖L2(D)
k!.
Therefore we finally achieve
‖∇∂kymu‖L2(D)
k!≤ Rk√
amin≤ 1√amin
1
2(2γm)k
(R0 +
CP√amin
(1 + ‖f‖L2(D))
)≤ 1√amin
1
2(2γm)k
(CP√amin‖f‖L2(D) +
CP√amin
(1 + ‖f‖L2(D))
)=
CP2amin
(2γm)k(1 + 2‖f‖L2(D)
). (4.1.6)
Now fix ym ∈ Γm and define the power series u : C→ C0σ∗m
(Γ∗m;H10 (D))
u(z,y∗m,x) :=∞∑k=0
(z − ym)k
k!∂kymu(ym,y
∗m,x).
We aim to prove that the above series converges to the solution u in a complex disccentred at ym. For z ∈ C we have
‖u(z)‖C0σ∗m
(Γ∗m;H10 (D)) ≤
∞∑k=0
(z − ym)k
k!‖∂kymu(ym)‖C0
σ∗m(Γ∗m;H1
0 (D))
=
∞∑k=0
(z − ym)k
k!‖∇∂kymu(ym)‖C0
σ∗m(Γ∗m;L2(D)).
32

From (4.1.6) we get for all k ∈ N0
‖∇∂kymu(ym)‖C0σ∗m
(Γ∗m;L2(D)) = maxy∗m∈Γ∗m
σ∗m(y∗m)‖∇∂kymu(ym,y∗m)‖L2(D)
≤ maxy∗m∈Γ∗m
σ∗m(y∗m)CP
2amin(2γm)kk!
(1 + 2‖f(y)‖L2(D)
)=
CP2amin
(2γm)kk!
(max
y∗m∈Γ∗mσ∗m(y∗m) + 2‖f(ym)‖C0
σ∗m(Γ∗m;L2(D))
)≤ CP
2amin(2γm)kk!
(1 + 2‖f(ym)‖C0
σ∗m(Γ∗m;L2(D))
)where the last inequality follows by definition of the weight σ. Inserting this bound inthe previous display
‖u(z)‖C0σ∗m
(Γ∗m;H10 (D)) ≤
∞∑k=0
(z − ym)k
k!‖∇∂kymu(ym)‖C0
σ∗m(Γ∗m;L2(D))
≤∞∑k=0
(z − ym)k
k!
CP2amin
(2γm)kk!(
1 + 2‖f(ym)‖C0σ∗m
(Γ∗m;L2(D))
)=
CP2amin
(1 + 2‖f(ym)‖C0
σ∗m(Γ∗m;L2(D))
) ∞∑k=0
[(z − ym)(2γm)]k. (4.1.7)
Therefore we can conclude that the power series converges for all z ∈ C such that
dist(z, ym) ≤ τm <1
2γm.
This reasoning is independent on the choice of ym ∈ Γm. Hence by a continuationargument the series converges in Σ(Γm; τm) for τm < 1
2γm. Finally observe that the
power series converges exactly to u. Indeed for all z ∈ C∥∥∥∥∥u(z)−n∑k=0
(z − ym)k
k!∂kymu(ym,y
∗m,x)
∥∥∥∥∥C0σ∗m
(Γ∗m;H10 (D))
≤ supdist(s,ym)≤|z−ym|
‖∂n+1ym u(s,y∗m,x)‖C0
σ∗m(Γ∗m;H1
0 (D))
|z − ym|n+1
(n+ 1)!
≤ CP2amin
|z − ym|n+1(2γm)n+1(
1 + 2‖f(ym)‖C0σ∗m
(Γ∗m;L2(D))
)and this upper-bound goes to zero as n→∞whenever |z − ym| < 1
2γm.
Note that for z ∈ Σ(Γm; τm) it holds that
σm(<z) ≤ eαmτmσm(ym).
33

Along the same line as above, the estimate in the statement follows from
σm(<z)‖u(z)‖C0σ∗m
(Γ∗m;H10 (D)) ≤ eαmτmσm(ym)‖u(z)‖C0
σ∗m(Γ∗m;H1
0 (D))
≤ eαmτm maxym∈Γm
σm(ym)CP
2amin
(1 + 2‖f‖C0
σ∗m(Γ∗m;L2(D))
) ∞∑k=0
[(z − ym)(2γm)]k
= eαmτmCP
2amin
(max
ym∈Γmσm(ym) + 2‖f‖C0
σ(Γ;L2(D))
) ∞∑k=0
[(z − ym)(2γm)]k
≤ eαmτm CP2amin
(1 + 2‖f‖C0
σ(Γ;L2(D))
) ∞∑k=0
[(z − ym)(2γm)]k
≤ CP eαmτm
2amin(1− 2τmγm)(1 + 2‖f‖C0
σ(Γ;L2(D)))
where again we have used in the second-to-last inequality the fact that σm ≤ 1 in Γm.
Remark 3. The coefficients aN and fN in (4.0.1) are decomposed by using truncations of theKarhunen-Loève expansions of the corresponding infinite-dimensional random fields. In thiscase assumptions of Lemma 4.1.2 are fulfilled. In particular for
aN (ω,x) = Ea(x) +
N∑m=1
√λmφm(x)Ym(ω)
provided that aN (ω,x) ≥ amin in D and P -a.s. in Ω, we have∥∥∥∥∥∂kymaN (y)
aN (y)
∥∥∥∥∥L∞(D)
≤
√λm‖φm‖L∞(D)
amin, k = 1
0, k > 1
and we can take γm =
√λm‖φm‖L∞(D)
amin. Similarly for
fN (ω,x) = Ef (x) +
N∑m=1
√µmϕm(x)Ym(ω)
we have‖∂kymfN (y)‖L2(D)
1 + ‖fN (y)‖L2(D)≤
√µm‖ϕm‖L2(D), k = 1
0, k > 1
and we can take γm =√µm‖ϕm‖L2(D).
We may also be interested, as we will do in Chapter 5, in a truncated exponential decomposi-tion of the diffusion coefficient. More precisely,
log[aN (ω,x)− amin] = Ea(x) +N∑m=1
√λmφm(x)Ym(ω).
34

In this case we have∥∥∥∥∥∂kymaN (y)
aN (y)
∥∥∥∥∥L∞(D)
≤(√
λm‖φm‖L∞(D)
)k, k ≥ 1
and we can take γm =√λm‖φm‖L∞(D).
4.2 Convergence Analysis
The main goal of this section is to provide an a priori estimate on the total error betweenthe exact solution u of problem (2.1.3) and the approximation uN,p,h we finally recoverby applying the stochastic collocation method. By considering the subsequent approxi-mations we have introduced in our analysis, we can naturally split the total error in thefollowing way
‖u− uN,p,h‖VP ≤ ‖u− uN‖VP + ‖uN − uN,p‖VP + ‖uN,p − uN,p,h‖VP
where VP = L2P (Ω)⊗H1
0 (D) as defined in Chapter 2.
4.2.1 Error of the Truncation
We first focus on the term ‖u − uN‖VP . Here uN indicates the exact solution of theweak problem (2.2.3) where the random coefficients of (2.1.3) have been substitutedby the corresponding Karhunen-Loève truncated expansions. Thus we aim to give anupper bound for the truncation error of u depending on the truncation errors of a and fwhich have been investigated in Section 1.2. Consider the two variational formulationsof finding u, uN ∈ VP such that respectively it holds ∀ψ ∈ H1
0 (D), P -a.e. in Ω∫Da(ω,x)∇u(ω,x) · ∇ψ(x)dx =
∫Df(ω,x)ψ(x)dx, (4.2.1)
∫DaN (ω,x)∇uN (ω,x) · ∇ψ(x)dx =
∫DfN (ω,x)ψ(x)dx. (4.2.2)
Now dropping the variable dependence for shortness of the notation, the followingholds P -a.e. in Ω and ∀ψ ∈ H1
0 (D)∫Da∇(u− uN ) · ∇ψdx =
∫Da∇u · ∇ψdx−
∫DaN∇uN · ∇ψdx
+
∫DaN∇uN · ∇ψdx−
∫Da∇uN · ∇ψdx
=
∫D
(f − fN )ψdx +
∫D
(aN − a)∇uN · ∇ψdx.
35

Applying Holder’s and Poincaré’s inequalities we get∣∣∣∣∫Da∇(u− uN ) · ∇ψdx
∣∣∣∣ ≤ ‖f − fN‖L2(D)‖ψ‖L2(D)
+ ‖a− aN‖L∞(D)‖∇uN‖L2(D)‖∇ψ‖L2(D)
≤ CP ‖f − fN‖L2(D)‖ψ‖H10 (D)
+ ‖a− aN‖L∞(D)‖∇uN‖L2(D)‖ψ‖H10 (D).
Therefore we end up with the P -a.e. estimate
‖u− uN‖H10 (D) ≤
1
aminsup
ψ∈H10 (D)
∫D a∇(u− uN ) · ∇φ‖ψ‖H1
0 (D)
- ‖f − fN‖L2(D) + ‖a− aN‖L∞(D)‖∇uN‖L2(D)
- ‖f − fN‖L2(D) + ‖a− aN‖L∞(D)‖fN‖L2(D)
where the notation b - c means that there exists a constant K such that b ≤ Kc. Re-markably the constants we have omitted in the previous estimate do not depend on N .Finally we obtain
‖u− uN‖VP - ‖f − fN‖L2P (Ω)⊗L2(D) + ‖a− aN‖L2
P (Ω;L∞(D)‖fN‖L2P (Ω)⊗L2(D).
Given the Karhunen-Loève expansions of a and f
a(ω,x) = Ea(x) +∞∑m=1
√λmφm(x)Ym(ω), f(ω,x) = Ef (x) +
∞∑m=1
√µmϕm(x)Ym(ω),
we have shown in Section 1.2 that the following estimate holds
‖f − fN‖2L2P (Ω)⊗L2(D) =
∑m≥N+1
µm.
On the other hand, assuming that the sequence (Ym)m is uniformly bounded in L∞P (Ω),
‖a− aN‖L2P (Ω;L∞(D) ≤ ‖a− aN‖L∞(Ω×D) ≤ C
∑m≥N+1
√λm ‖φm‖L∞(D) .
Moreover depending on the regularity, as in Definition 1.2.4, of the covariance functionsVa and Vf of a and f respectively, we have presented explicit bounds for the eigenvaluesand eigenfunctions (see Section 1.2.1).
4.2.2 Finite Element Error
Here we concentrate on the analysis of the error caused by the finite element approxi-mation as described at the end of Section 3.1. We refer the reader to [9]. We are inter-ested in estimating ‖uN,p − uN,p,h‖VP . First of all observe that by passing to the proba-bility space L2
ρ(Γ) we have
‖uN,p − uN,p,h‖VP = ‖uN,p − uN,p,h‖Vρ
36

where Vρ = L2ρ(Γ) ⊗H1
0 (D) as defined in Section 2.2. Consider Vh(D) a finite elementspace of continuous piecewise polynomials defined on a uniform triangulation Th ofthe domain D ⊂ Rd with maximum mesh size h. The approximation error can becontrolled by the mesh size. Namely
‖uN,p − uN,p,h‖Vρ ≤ C minv∈L2
ρ(Γ)⊗Vh(D)‖uN,p − v‖Vρ ≤ C(uN,p, n)hn
where both C and C(uN,p, n) are independent of the mesh size and n is a positive in-teger determined by the smoothness of uN,p in D and the degree of the finite elementspace. In particular for Sqh(D) ⊂ H1
0 (D) containing all continuous piecewise polynomi-als of degree q we have for l ∈ 0, 1
‖uN,p − uN,p,h‖L2ρ(Γ)⊗Hl(D) - hr−l‖uN,p‖L2
ρ(Γ)⊗Hr(D)
for 1 ≤ r ≤ minq + 1, swhenever uN,p ∈ L2ρ(Γ)⊗Hs(D) (see [9], Remark 4.4.27).
4.2.3 Collocation Error - Full Tensor Method
The evaluation of the last error term ‖uN − uN,p‖VP deriving from the approxima-tion in the random space requires a more extensive treatment. We first conduct aone-dimensional analysis using the same notation as in the previous chapters withm = 1, ..., N. Let Γm ⊂ R be a bounded or unbounded domain. Consider the density
ρm : Γm −→ R+, ρm(ym) ≤ C(m)maxe
−(δmym)2
for some C(m)max > 0 and δm = 0 in the case Γm is bounded and δm > 0 when Γm is
unbounded. Moreover let σm : Γm −→ R+ such that
σm(ym) ≥ Cme−(δmym)2
4
for some Cm > 0. Observe that this requirement is fulfilled both by a Gaussian weightσm(ym) = e−(µmym)2
for µm ≤ δm/2 and an exponential weight σm(ym) = e−αm|ym| forsome αm > 0. Recall the functional space
C0σm(Γm;V ) =
v : Γm → V, v continuous in ym, max
ym∈Γmσm(ym)‖v(ym)‖V <∞
where V is an Hilbert space. Under the previous assumptions it easily follows that thefollowing continuous embedding holds
C0σm(Γm;V ) → L2
ρm(Γm;V ) (4.2.3)
and we denote the continuity constant with C1.
37

Denote with ym,kmpm+1km=1 the zeros of the non-trivial polynomial qpm+1 ∈ Ppm+1(Γm)
orthogonal to the space Ppm(Γm) with respect to ρm. Denote by Ipm the Lagrange inter-polation operator
Ipm : C0σm(Γm;V ) −→ L2
ρm(Γm;V ), Ipmv(ym) =
pm+1∑km=1
v(ym,km)`m,km(ym) (4.2.4)
where `m,km ∈ Ppm(Γm), `m,km(ym) =pm+1∏i=1i 6=km
ym − ym,iym,km − ym,i
.
Observe that `m,j(ym,i) = δji for j, i = 1, ..., pm + 1. In the following we exploit severalproperties of the above polynomials. The first one is their mutual orthogonality withrespect to ρm. Indeed by noting that `m,j(ym,j)`m,i(ym,j) = 0 for all j = 1, ..., pm + 1 andi 6= j, we can conclude that there exists a polynomial h ∈ Ppm(Γm) such that
`m,j(ym)`m,i(ym) = h(ym)qpm+1(ym).
Therefore by assumption on qpm+1 we obtain∫Γm
`m,j(ym)`m,i(ym)ρm(ym)dym =
∫Γm
h(ym)qpm+1(ym)ρm(ym)dym = 0.
The second useful property reads
pm+1∑km=1
`m,km(ym) = 1. (4.2.5)
This easily follows after observing that∑pm+1
km=1 `m,km(ym)− 1 is a polynomial of degreepm with the pm + 1 roots ym,km . Consequently it has to be
∑pm+1km=1 `m,km(ym)− 1 ≡ 0.
Recall from Section 3.1 the Gauss quadrature weights
ωm,km =
∫Γm
`2m,km(ym)ρm(ym)dym.
Observe thatpm+1∑km=1
ωm,km = 1. Indeed by orthogonality and equation (4.2.5) we have
pm+1∑km=1
ωm,km =
∫Γm
pm+1∑km=1
`2m,km(ym)ρm(ym)dym =
∫Γm
pm+1∑km=1
`m,km(ym)
2
ρm(ym)dym
=
∫Γm
ρm(ym)dym = 1.
We can prove the following
38

Lemma 4.2.1. The operator Ipm : C0σm(Γm;V ) −→ L2
ρm(Γm;V ) defined in (4.2.4) is contin-
uous with‖Ipmv‖L2
ρm(Γm;V ) ≤ C2‖v‖C0
σm(Γm;V ).
Proof. For any v ∈ C0σm(Γm;V ) we have
‖Ipmv‖2L2ρm
(Γm;V ) =
∫Γm
‖Ipmv(ym)‖2V ρm(ym)dym
=
∫Γm
∥∥∥∥∥∥pm+1∑km=1
v(ym,km)`m,km(ym)
∥∥∥∥∥∥2
V
ρm(ym)dym
≤∫
Γm
pm+1∑km,kn=1
`m,km(ym)`m,kn(ym) ‖v(ym,km)‖V ‖v(ym,kn)‖V ρm(ym)dym
=
pm+1∑km=1
‖v(ym,km)‖2V ωm,km
≤ maxkm∈1,...,pm+1
σ2m(ym,km) ‖v(ym,km)‖2V
pm+1∑km=1
ωm,kmσ2m(ym,km)
≤ ‖v‖2C0σm
(Γm;V )
pm+1∑km=1
ωm,kmσ2m(ym,km)
(4.2.6)
where we have used the orthogonality property of the Lagrange polynomials. Now wehave to possible cases. If Γm is bounded then δm = 0 and consequently σm ≥ Cm. Thus(4.2.6) gives
‖Ipmv‖2L2ρm
(Γm;V ) ≤1
C2m
‖v‖2C0σm
(Γm;V )
pm+1∑km=1
ωkm =1
C2m
‖v‖2C0σm
(Γm;V ) .
In the case of Γm unbounded we apply a result from [5, Section 7]. Namely as all theeven moments
∫Γm
y2nm ρm(ym)dym are bounded by the moments of the Gaussian density
e−(δmym)2by assumption on ρm, we can conclude
pm+1∑km=1
ωm,kmσ2m(ym,km)
pm→∞−→∫
Γm
ρm(ym)
σ2m(ym)
dym ≤C
(m)max
C2m
√2π
δm.
Therefore from (4.2.6)
‖Ipmv‖2L2ρm
(Γm;V ) ≤ ‖v‖2C0σm
(Γm;V )
∞∑km=1
ωm,kmσ2m(ym,km)
≤ C(m)max
C2m
√2π
δm‖v‖2C0
σm(Γm;V ) .
39

Hence the lemma is proved with continuity constant independent of pm defined as
C22 :=
1
C2m
, Γm is bounded
C(m)max
C2m
√2π
δm, Γm is unbounded
.
Lemma 4.2.2. For any function v ∈ C0σm(Γm;V ) the interpolation error satisfies
‖v − Ipmv‖L2ρm
(Γm;V ) ≤ C3 infw∈Ppm (Γm)⊗V
‖v − w‖C0σm (Γm;V ) (4.2.7)
where C3 is independent of pm.
Proof. Note that for all w ∈ Ppm(Γm)⊗ V it holds that Ipmw = w. Thus
‖v − Ipmv‖L2ρm
(Γm;V ) ≤ ‖v − w‖L2ρm
(Γm;V ) + ‖Ipmw − Ipmv‖L2ρm
(Γm;V )
≤ ‖v − w‖L2ρm
(Γm;V ) + ‖Ipm(w − v)‖L2ρm
(Γm;V )
≤ C1‖v − w‖C0σm
(Γm;V ) + C2‖v − w‖C0σm
(Γm;V )
≤ C3‖v − w‖C0σm
(Γm;V )
where in the second-to-last inequality we have used the embedding (4.2.3) and Lemma4.2.1. The constant C3 is equal to maxC1, C2. Since w ∈ Ppm(Γm) ⊗ V was arbitrary,the claim follows.
Now we examine the error on the right hand side of (4.2.7). In particular we considerthe case of a function v : Γm → V which admits an analytic extension, again denotedwith v, in the region Σ(Γm; τm) := z ∈ C : dist(z,Γm) ≤ τm ⊂ C for some τm > 0. Wesplit the analysis into the two cases of Γm bounded or unbounded.Let us first focus on the bounded case where σm = 1.
Lemma 4.2.3. Let v : Γm → V be a function which admits an analytic extension v in theregion Σ(Γm; τm) for some τm > 0. Then
infw∈Ppm (Γm)⊗V
‖v − w‖C0(Γm;V ) ≤2
%m − 1%−pmm max
z∈Σ(Γm;τm)‖v(z)‖V
where 1 < %m =2τm|Γm|
+
√4τ2m
|Γm|2+ 1.
Proof. Consider the following change of variable: g(t) = y0 + |Γm|2 twith y0 the midpointof Γm. Consequently g([−1, 1]) = Γm. Let v(t) := v(g(t)). Thus v admits an analyticextension in the region
Σ
([−1, 1];
2τm|Γm|
).
40

The function x 7→ v(cosx) is even, 2π-periodic with continuous derivative. Thus it hasa convergent Fourier series
v(cosx) =a0
2+∞∑k=1
ak cos(kx)
where ak ∈ V is defined as
ak =1
π
∫ π
−πv(cosx) cos(kx)dx.
Define the Chebyshev polynomialsCk(cosx) := cos(kx). Let t = cosx.We can reformu-late the previous expansion in terms of the Ck’s on [−1, 1] and we get for v : [−1, 1]→ V
v(t) =a0
2+
∞∑k=1
akCk(t). (4.2.8)
Thanks to [6, Theorem 7] and [7, proof of Theorem 8.1] we know that for all %m > 1such that v is analytic on
D%m :=
z = y + iw :
y2
a2+w2
b2≤ 1, a =
%m + %−1m
2, b =
%m − %−1m
2
,
it holds that the series (4.2.8) converges within D%m and for all k ∈ N the coefficientssatisfy the following bound
‖ak‖V ≤ 2%−km maxz∈D%m
‖v(z)‖V . (4.2.9)
Denote by Πpm the truncation of Chebyshev expansion (4.2.8) up to pm. Then
infw∈Ppm (Γm)⊗V
‖v − w‖C0(Γm;V ) = infw∈Ppm ([−1,1])⊗V
‖v − w‖C0([−1,1];V )
≤ ‖v −Πpm v‖C0([−1,1];V )
=
∥∥∥∥∥∥∞∑
k=pm+1
akCk(t)
∥∥∥∥∥∥C0([−1,1];V )
≤∞∑
k=pm+1
‖ak‖V
≤ 2 maxz∈D%m
‖v(z)‖V∞∑
k=pm+1
%−km
= 2 maxz∈D%m
‖v(z)‖V%−pmm
%m − 1
≤ 2 maxz∈Σ
([−1,1]; 2τm
|Γm|
) ‖v(z)‖V%−pmm
%m − 1
= 2 maxz∈Σ(Γm;τm)
‖v(z)‖V%−pmm
%m − 1
41

where we have used in the second inequality the fact that maxt∈[−1,1] |Ck(t)| = 1 and inthe third inequality the bound (4.2.9).
Finally observe that the largest ellipse that can be drawn inside Σ(
[−1, 1]; 2τm|Γm|
)is
obtained by equating the minor semi-axis of ∂D%m , the boundary of D%m , with theradius 2τm
|Γm| , i.e.%m − %−1
m
2=
2τm|Γm|
.
Solving the equation we find
%m =2τm|Γm|
+
√4τ2m
|Γm|2+ 1.
Now we turn to the case of Γm unbounded, i.e. Γm = R. We first present a resultconcerning Hermite polynomials. Let Hn(y) ∈ Pn(R) denote the normalized Hermitepolynomials
Hn(y) =1√√π2nn!
(−1)ney2 ∂n
∂yn(e−y
2)
and hn the Hermite functions
hn(y) = e−y2
2 Hn(y).
From [13] we know that Hermite polynomials form a complete orthonormal basis ofL2(R) with respect to the weight e−y
2, i.e.∫
RHn(y)Hm(y)e−y
2dy = δnm.
It has been proved in [8, Theorem 1] that the following holds true.
Lemma 4.2.4. Let f be an analytic function in S(R; τ) := z = y + iw : w ∈ [−τ, τ ] ⊂ C.The Hermite-Fourier series
∞∑n=0
fnhn(z), fn =
∫Rf(y)hn(y)dy (4.2.10)
exists and converges to f in S(R; τ) if and only if for every β ∈ [0, τ) there exists a finitepositive constant C(β) such that
|f(y + iw)| ≤ C(β)e−|y|√β2−w2
, y ∈ R, w ∈ [−β, β].
Moreover it holds that
|fn| ≤ Ce−τ√
2n+1. (4.2.11)
42

Recall from the beginning of the section the two weights
Gm(y) := e−(δmym)2
4 , σm(y) = e−αm|ym|
for some αm, δm > 0. Clearly C0σm(Γm;V ) → C0
Gm(Γm;V ).
Lemma 4.2.5. Let v ∈ C0σm(Γm;V ) which admits an analytic extension in Σ(R; τm) ⊂ C for
some τm > 0 and such that for all z = y + iw ∈ Σ(R; τm) it holds
σm(y)‖v(z)‖V ≤ Cv(τm)
for some positive finite constant Cv(τm). Then, for any δm > 0, there exist a constant K,independent of pm, and a function χ(pm) = O(
√pm) such that
infw∈Ppm (Γm)⊗V
‖v − w‖C0Gm
(Γm;V ) ≤ KΘ(pm)e−τmδm√pm .
Proof. Consider the following change of variable: g(t) =√
2δmt. Let v(t) := v(g(t)). Thus
v admits an analytic extension in the region
Σ
(R;τmδm√
2
).
Moreover observe that v ∈ C0σm
(Γm;V ) with σm(t) = e−√
2αmδm|t|. We consider the ex-
pansion of v in Hermite polynomials
v(t) =
∞∑n=0
vnHn(t), vn =
∫Rv(t)Hn(t)e−t
2dt. (4.2.12)
Now define f(z) := v(z)e−z2
2 . Note that the Hermite-Fourier series of f defined in(4.2.10) has the same coefficients as the expansion (4.2.12). Indeed
fn =
∫Rf(t)hn(t)dt =
∫Rv(t)e−
t2
2 e−t2
2 Hn(t)dt = vn.
As a product of analytic functions, f is also analytic in Σ(R; τmδm√
2
). Moreover
‖f(y + iw)‖V =
∣∣∣∣e− (y+iw)2
2
∣∣∣∣ ‖v(z)‖V ≤ e−y2−w2
21
σm(y)Cv(τm) = e−
y2−w2
2 e√
2αmδm|y|Cv(τm).
For βm ∈[0, τmδm√
2
)define
C(βm) := maxy∈R
w∈[−βm,βm]
exp−y
2 − w2
2+√
2αmδm|y|+ |y|
√β2m − w2
.
43

Note that this is a bounded constant for all βm. Observe also that
‖f(y + iw)‖V ≤ Cv(τm)e−y2−w2
2+√
2αmδm|y|+|y|
√β2m−w2
· e−|y|√β2m−w2
≤ Cv(τm)C(βm)e−|y|√β2m−w2
.
Therefore f satisfies the assumptions of Lemma 4.2.4. Hence the Hermite-Fourier se-ries of f converges in Σ
(R; τmδm√
2
)and the coefficients fn satisfies the bound (4.2.11).
Consequently
‖vn‖V ≤ Ce− τmδm√
2
√2n+1
.
Denote by Πpm the truncation of the Hermite expansion (4.2.12) up to pm. Then
infw∈Ppm (Γm)⊗V
‖v − w‖C0Gm
(Γm;V ) = infw∈Ppm (Γm)⊗V
‖v − w‖C0Gm
(Γm;V )
≤ ‖v −Πpm v‖C0Gm
(Γ;V )
= maxt∈R
∥∥∥∥∥∥∞∑
n=pm+1
vnHn(t)e−t2/2
∥∥∥∥∥∥V
= maxt∈R
∥∥∥∥∥∥∞∑
n=pm+1
vnhn(t)
∥∥∥∥∥∥V
≤ maxt∈R
∞∑n=pm+1
‖vnhn(t)‖V .
From [10, bound (2.2)] we know that |hn(t)| ≤ 1 for all t ∈ R and all n. Thus
infw∈Ppm (Γm)⊗V
‖v − w‖C0Gm
(Γm;V ) ≤∞∑
n=pm+1
‖vn‖V ≤ C∞∑
n=pm+1
e− τmδm√
2
√2n+1
.
Finally we use the following result given in [11, Lemma A.2]: for r ∈ R+, r < 1 it holds
∞∑n=p+1
r√
2n+1 ≤
(2√p+ 1
r√
2(1− r√
2)+O(1)
)r√
2p.
We can now proceed to prove the following
Theorem 4.2.6. Under the assumptions of Section 4.1, there exist positive constants (rm)Nm=1
and C, independent of p = (p1, ..., pN ), such that the approximation error of the full tensorcollocation method satisfies
‖uN − I fulluN‖VP ≤ CN∑m=1
χm(pm)e−rmpθmm
44

where
θm =
1, Γm is bounded12 , Γm is unbounded
, χm(pm) =
1, Γm is boundedO(√pm), Γm is unbounded
,
rm =
log
(2τm|Γm|
+
√1 +
4τ2m
|Γm|2
), Γm is bounded
τmδm, Γm is unbounded
with τm defined in Lemma 4.1.2 and δm as in (4.1.1).
Proof. Firstly observe that by passing to the probability space L2ρ(Γ) we have
‖uN − I fulluN‖VP = ‖uN − I fulluN‖Vρ
where Vρ = L2ρ(Γ)⊗H1
0 (D). Consequently we want to provide an upper-bound for
‖uN − I fulluN‖Vρ .
In order to lighten the notation we will drop the subscript N .Now observe that from (4.1.2) we have
‖u− I fullu‖L2ρ(Γ)⊗H1
0 (D) ≤∥∥∥∥ρρ∥∥∥∥1/2
L∞(Γ)
‖u− I fullu‖L2ρ(Γ)⊗H1
0 (D).
To examine the error in the right-hand side we want to exploit the one-dimensionalanalysis we have conducted in Section 4.2.3.The term u − I fullu is an interpolation error. Indeed recall that I full =
⊗Nm=1 Ipm and
Ipm is the one-dimensional interpolant defined in (3.1.3).We define the following interpolation operator acting on the last N − j + 1 directionswith j = 1, ..., N
Ip∗j v(y,x) =
pj+1∑kj=1
· · ·pN+1∑kN=1
v(y1, ..., yj−1, yj,kj , ..., yN,kN ,x)`j,kj (yj) · · · `N,kN (yN ).
Equivalently Ip∗j = Ipj ⊗ · · · ⊗ IpN . Let us consider the first direction. Since
I full = Ip1 ⊗ Ip∗2 ,
we get
‖u− I fullu‖L2ρ(Γ)⊗H1
0 (D) = ‖u− Ip1u+ Ip1u− (Ip1 ⊗ Ip∗2)u‖L2ρ(Γ)⊗H1
0 (D)
≤ ‖u− Ip1u‖L2ρ(Γ)⊗H1
0 (D) + ‖Ip1(u− Ip∗2u)‖L2ρ(Γ)⊗H1
0 (D).
45

We introduce the following notation:
Γ∗j :=
N∏i=j
Γi, ρ∗j :=
N∏i=j
ρi, σ∗j :=
N∏i=j
σi.
We view u as a function u : Γ1 → L2ρ∗2
(Γ∗2)⊗H10 (D). Then u ∈ L2
ρ1(Γ1;L2
ρ∗2(Γ∗2)⊗H1
0 (D)).
This allows us to write
‖u− Ip1u‖L2ρ(Γ)⊗H1
0 (D) = ‖u− Ip1u‖L2ρ1
(Γ1;L2ρ∗2
(Γ∗2)⊗H10 (D)), (4.2.13)
‖Ip1(u− Ip∗2u)‖L2ρ(Γ)⊗H1
0 (D) = ‖Ip1(u− Ip∗2u)‖L2ρ1
(Γ1;L2ρ∗2
(Γ∗2)⊗H10 (D)). (4.2.14)
For V = L2ρ∗2
(Γ∗2) ⊗H10 (D), we have already proved that the following continuous em-
beddings holdC0σ1
(Γ1;V ) → C0G1
(Γ1;V ) → L2ρ1
(Γ1;V )
with σ1 = G1 = 1 if Γ1 is bounded and G1(y1) = e−(δ1y1)2
4 , σ1(y1) = e−α1|y1| for someα1, δ1 > 0 if Γ1 is unbounded. From Lemma 4.2.1 we know that Ip1 is continuous asan operator from both C0
σ1(Γ1;V ) and C0
G1(Γ1;V ) to L2
ρ1(Γ1;V ). Thus thanks to Lemma
4.2.2 we have the following bound for (4.2.13)
‖u− Ip1u‖L2ρ1
(Γ1;V ) ≤ C3 infw1∈Pp1 (Γ1)⊗V
‖u− w1‖C0G1
(Γ1;V ).
By Lemmas 4.2.5 and 4.2.3 we finally get
infw∈Pp1 (Γ1)⊗V
‖u− w1‖C0G1
(Γ1;V ) ≤
2
%1−1 maxz∈Σ(Γ1;τ1)
‖u(z)‖V e−p1 log %1 , Γ1 is bounded
K1O(√p1)e−τ1δ1
√p1 , Γ1 is unbounded
≤ C1
e−p1 log %1 , Γ1 is boundedO(√p1)e−τ1δ1
√p1 , Γ1 is unbounded
where %1 = 2τ1|Γ1| +
√1 +
4τ21
|Γ1|2 and C1 := max
K1,
2%1−1 max
z∈Σ(Γ1;τ1)‖u(z)‖V
is indepen-
dent of p1. Note that in both cases we need the regularity results as stated in Lemma4.1.2. Moreover by Lemma 4.1.1 the assumption u ∈ C0
σ1(Γ1;V ) of Lemma 4.2.5 is ful-
filled.It remains to bound the term in (4.2.14). We can do that by using Lemma 4.2.1 and
we get‖Ip1(u− Ip∗2u)‖L2
ρ1(Γ1;V ) ≤
√C2‖u− Ip∗2u‖C0
σ1(Γ1;V ).
Observe that for the right-hand side we have
‖u− Ip∗2u‖C0σ1
(Γ1;L2ρ∗2
(Γ∗2)⊗H10 (D)) = max
y1∈Γ1
σ1(y1)‖u− Ip∗2u‖L2ρ∗2
(Γ∗2)⊗H10 (D)
≤ maxy1∈Γ1
‖u− Ip∗2u‖L2ρ∗2
(Γ∗2)⊗H10 (D). (4.2.15)
46

Therefore we can proceed iteratively considering Ip2 and Ip∗3 such that Ip∗2 = Ip2 ⊗ Ip∗3and (4.2.15) can be bounded, uniformly in Γ1, in the following way
‖u− Ip∗2u‖L2ρ∗2
(Γ∗2)⊗H10 (D) ≤ ‖u− Ip2u‖L2
ρ2(Γ2;L2
ρ∗3(Γ∗3)⊗H1
0 (D))
+ ‖Ip2(u− Ip∗3u)‖L2ρ2
(Γ2;L2ρ∗3
(Γ∗3)⊗H10 (D)).
The most-right-hand side in the previous display will be again bounded uniformlyin Γ2 and so on considering all the remaining directions y3, ..., yN . At each step forj = 2, ..., N − 1 we define
Cj = max
Kj ,
2
ρj − 1max
Σ(Γj ;τj)‖u‖L2
ρ∗j+1
(Γ∗j+1;H10 (D))
and
CN = max
KN ,
2
ρN − 1max
Σ(ΓN ;τN )‖u‖H1
0 (D)
.
The constant C appearing in the statement will be then
C = max
C1, max
y1∈Γ1
C2, ..., maxy1∈Γ1
· · · maxyN−1∈ΓN−1
CN
.
4.2.4 Convergence Result
We can collect all the results obtained so far in the following
Theorem 4.2.7. If the following assumptions are satisfied:
(A1) a ∈ L2P (Ω)⊗ L2(D).
(A2) a is uniformly bounded from below by amin > 0.
(A3) f ∈ L2P (Ω)⊗ L2(D).
(A4) f ∈ C0σ(Γ;L2(D)).
(A5) ∀y ∈ Γ, ρ(y) ≤ Cρe−∑Nm=1(δmym)2 for some Cρ > 0.
(A6) ∀y ∈ Γ,∃γm <∞ :
∥∥∥∥∥∂kyma(y)
a(y)
∥∥∥∥∥L∞(D)
≤ γkmk! and
∥∥∂kymf(y)∥∥L2(D)
1 + ‖f(y)‖L2(D)≤ γkmk!.
(A7) (Ym)m is uniformly bounded in L∞(Ω).
(A8) uN,p ∈ L2ρ(Γ)⊗ (Hs(D) ∩H1
0 (D)) for s ≥ 1.
(A9) ∀ym ∈ Γm, σm(ym) ≥ Cme−(δmym)2
4 for some Cm > 0.
47

Then for 1 ≤ r ≤ minq + 1, s and q the degree of the polynomial approximation in D, thefollowing error bound for the stochastic full tensor collocation approximation holds true
‖u− uN,p,h‖L2P (Ω)⊗H1
0 (D) -∑
m≥N+1
µm + ‖f‖L2P (Ω)⊗L2(D)
∑m≥N+1
√λm ‖φm‖L∞(D)
+ hr−1‖uN,p‖L2ρ(Γ)⊗Hr(D)
+N∑m=1
χm(pm)e−rmpθmm (4.2.16)
where µm, λm and φm are as in Section 4.2.1, h is the mesh size introduced in Section 4.2.2 andχm, rm and θm are defined in Theorem 4.2.6.
Proof. The first two terms on the right-hand side of (4.2.16) are related to the truncationerror and the bound can be found in Section 4.2.1. The second line of the claim concernsthe spatial approximation in D and it has been examined in Section 4.2.2. The last termcontrols the convergence in the random domain Ω and the result is given in Theorem4.2.6.
4.2.5 Collocation Error - Sparse Tensor Method
We have an analogue result of Theorem 4.2.6 when we adopt a sparse collocation gridinstead of the full one. For a more detailed proof see [12]. We adopt the same notationas in Section 3.2.
Theorem 4.2.8. Under the assumptions of Section 4.1, in the case of Γ bounded, the approxi-mation error of the isotropic Smolyak sparse tensor collocation method satisfies
‖uN − St,gw uN‖VP ≤ C(rmin, N)we−rmin
2w
where rmin := min1≤m≤N
miny∗m∈Γ∗m
rm , rm is defined in Theorem 4.2.6 and the constant C(rmin, N)
does not depend on w.
Proof. As in the proof of Theorem 4.2.6, we have
‖uN − St,gw uN‖VP = ‖uN − St,gw uN‖Vρ ≤∥∥∥∥ρρ∥∥∥∥1/2
L∞(Γ)
‖uN − St,gw uN‖Vρ .
For convenience we drop the subscript N . The proof is based on a one-dimensionalargument.
Let w ∈ N and recall the operator (3.2.2)
St,gw =∑
i∈NN+g(i)≤w
N⊗m=1
∆t(im)m
48

where
t(i) =
1, i = 1
2i−1 + 1, i ≥ 2, g(i) =
N∑m=1
(im − 1).
Let m ∈ 1, ..., N and V = L2ρ∗m
(Γ∗m)⊗H10 (D) with the notation as in Section 4.1. From
Lemma 4.2.2 we have for the one-dimensional operator (3.2.1)
‖u− It(im)m u‖L2
ρm(Γm;V ) ≤ C3 inf
w∈Pt(im)−1(Γm)⊗V‖u− w‖C0
σm(Γm;V ).
From Lemma 4.2.3 we also have
infw∈Pt(im)−1(Γm)⊗V
‖u− w‖C0σm
(Γm;V ) ≤2
erm − 1Mm(u)e−[t(im)−1]rm
where
Mm(u) := maxz∈Σ(Γm;τm)
‖u(z)‖V , rm = log
2τm|Γm|
+
√1 +
4τ2m
|Γm|2
and τm is defined in Lemma (4.1.2).Now by definition of the difference operator (3.2) we get
‖∆t(im)m u‖L2
ρm(Γm;V ) = ‖(It(im)
m − It(im−1)m )u‖L2
ρm(Γm;V )
≤ ‖u− It(im)m u‖L2
ρm(Γm;V ) + ‖u− It(im−1)
m u‖L2ρm
(Γm;V )
≤ 22
erm − 1Mm(u)e−[t(im−1)−1]rm .
Let Id : Γ → Γ the identity operator on Γ. Observe that u =∑
i∈NN⊗N
m=1 ∆t(im+1)m u.
Hence
‖(Id−∑|i|≤w
N⊗m=1
∆t(im+1)m )u‖L2
ρ(Γ;H1
0 (D)) ≤∑|i|>w
N∏m=1
∥∥∥∆t(im+1)m u
∥∥∥L2ρm
(Γm;V )
=∑|i|>w
N∏m=1
4
erm − 1Mm(u)e−[t(im)−1]rm .
Define M(u) := max1≤m≤N
maxy∗m∈Γ∗m
Mm(u) and rmin = min1≤m≤N
miny∗m∈Γ∗m
rm.
49

Then for C := 4ermin−1 we obtain
‖u−∑|i|≤w
N⊗m=1
∆t(im+1)m u‖L2
ρ(Γ;H1
0 (D)) ≤ CNM(u)N∑|i|>w
e−rmin
N∑m=1
[t(im)−1]
= CNM(u)N∑|i|>w
e−rmin
N∑m=1
2im−1
= CNM(u)N∑|i|>w
e− rmin
2
N∑m=1
2im
.
From the fact that for any i ∈ N+ the inequality 2i > i holds, we get
‖u−∑|i≤w
N⊗m=1
∆t(im+1)m u‖L2
ρ(Γ;H1
0 (D)) ≤ C(rmin, N)∑|i|>w
e− rmin
2
N∑m=1
2im
≤ C(rmin, N)∑|i|>w
e− rmin
2
N∑m=1
im
= C(rmin, N)∑|i|>w
e−rmin
2|i|
' C(rmin, N)we−rmin
2w
where C(rmin, N) = [CM(u)]N =
[4M(u)
ermin − 1
]N.
Remark 4. A related result in the case of Γ unbounded holds. In particular in the proof Lemma4.2.5 has to be invoked instead of Lemma 4.2.3.
Now we want to relate the number of collocation points in the Smolyak sparse gridto the level w.
Lemma 4.2.9. The cardinality of the Smolyak sparse tensor grid at levelw satisfies the followingupper bound
η = η(w,N) - 2wwN−1
where the omitted constant is of the order 2N .
50

Proof. By definition of Smolyak operator we have
η ≤∑
i∈NN :|i|≤w
N∏m=1
t(im + 1) =w∑j=0
∑|i|=j
N∏m=1
t(im + 1) =w∑j=0
∑|i|=j
N∏m=1
(2im + 1)
'w∑j=0
∑|i|=j
2|i| =w∑j=0
∑|i|=j
2j =w∑j=0
2j#i ∈ NN+ : |i| = j
=w∑j=0
2j(j +N − 1
N − 1
).
Observe that(j+N−1N−1
)≤ (j+N−1)N−1
(N−1)! ' jN−1. On the other hand(j+N−1N−1
)≥ jN−1
(N−1)! 'jN−1. Therefore we get
η -w∑j=0
2jjN−1 ' 2wwN−1.
4.3 Convergence of Moments
The main goal of the implementations which are material of the next chapter is thecomputation of the mean value and possibly higher moments of the final approxima-tion uN,p,h. Therefore we are interested in providing bounds for the error in the firsttwo moments with respect to some suitable norm.
Lemma 4.3.1. For V (D) := L2(D) or V (D) := H10 (D) it holds
‖E(u− uN,p,h)‖V (D) ≤ ‖u− uN,p,h‖L2P (Ω)⊗V (D).
Proof. Let us write ε := u − uN,p,h. We start with the case V (D) = L2(D). By Jensen’sinequality we have
‖E(ε)‖L2(D) ≤(∫
DE(ε2)
)1/2
= ‖ε‖L2P (Ω)⊗L2(D)
and we have the claim for L2(D). Now consider the case V (D) = H10 (D). Again by
Jensen’s inequality we get
‖E(ε)‖H10 (D) =
(∫D|∇(E(ε))|2
)1/2
≤(∫
DE(|∇ε)|2)
)1/2
= ‖ε‖L2P (Ω)⊗H1
0 (D).
For a proof of the following lemma we refer the reader to [11, Lemma 4.8].
51

Lemma 4.3.2.‖E(u2 − u2
N,p,h)‖L1(D) ≤ C‖u− uN,p,h‖L2P (Ω)⊗L2(D)
with constant C independent of h and p.
Remark 5. In order to estimate the convergence rate of the error of higher moments or theconvergence rate of the error of the second moment in stronger norms, we need more regularityassumptions on the solution.
4.4 Anisotropic Sparse Method - Selection of Weights α
Recall from the Section 4.2.3 the two Lemmas 4.2.3 and 4.2.5 which state that in a uni-variate case, assuming analyticity of the solution in the random space, the error of theapproximation by polynomials of the dependence on each random variable decays ex-ponentially fast in the polynomial degree. The size τm of the analyticity region dependsin general on the direction ym (cf. Lemma 4.1.2). Therefore the decay coefficients in boththe lemmas will depend on the same direction as well, respectively for the bounded andunbounded case
rm = log
2τm|Γm|
+
√4τ2m
|Γm|2+ 1
, rm = τmδm.
As we have already remarked in Section 3.2.1, the main point of the anisotropic versionof the sparse collocation method is to increase the number of points in those directionswhere the convergence rate is poor, i.e. rm small. One possible choice to relate theweights α = (α1, ..., αN ) to the rate r = (r1, ..., rN ) is the following
αm = rm, ∀m ∈ 1, ..., N.
52

5 Numerical Implementation
The last part of this work is devoted to the implementation of the stochastic collocationmethod in its isotropic version with the aim to validate the theoretical results we haveproved in the previous chapters.
5.1 Example
This example is taken from [12]. We analyse the following elliptic boundary valueproblem
−∇ · (a(ω,x)∇u(ω,x)) = f(ω,x), x ∈ Du(ω,x) = 0, x ∈ ∂D
where D = [0, 1]2 ⊂ R2 and x = (x1, x2). The coefficient f is deterministic, i.e.
f(x) = cos(x1) sin(x2).
On the other hand the truncated diffusion coefficient aN is given by
log(aN (ω,x)− 0.5) = 1 + Y1(ω)
(√πL
2
)1/2
+N∑m=2
λmφm(x)Ym(ω) (5.1.1)
where for m ≥ 2
λm = (√πL)1/2 exp
(−(bm2 cπL
)28
), φm(x) =
sin
(bm2 cπx1
Lp
), m even
cos
(bm2 cπx1
Lp
), m odd
.
It can be shown (see [12]) that (5.1.1) is the truncation of a random field with covariance
Vlog(a−0.5)(x,x′) = exp
(−(x1 − x′1)2
L2c
).
Here Lc denotes a physical correlation length. This means that the random fieldslog[a(x)− 0.5] and log[a(x′)− 0.5] are only very weakly correlated for |x− x′| Lc. Sowe take L and Lp in the previous displays as Lp = max1, 2Lc and L = Lc/Lp. In ourcomputations we will fix Lc = 1
64 .We consider independent random variables (Ym)Nm=1 which are uniformly distributed
on the interval [−√
3,√
3]. Thus the stochastic domain Γ is given by [−√
3,√
3]N . More-over the collocation points in this case will be the roots of the Legendre polynomials.
53

Figure 5.1.1: The triangular mesh of the domain D corresponding to n = 8.
The spatial approximation is conducted applying a finite element method which em-ploys piecewise linear polynomials over a uniform triangulation of D of mesh size√
2/n, n ∈ N (see Figure 5.1.1 for an example).In this section we are particularly interested in studying the convergence of the col-
location error as described in Section 4.2.3 and therefore we fix both the dimension Nof the truncation and the dimension n of the finite element space.For N = 2 and n = 8, the first two statistics of the approximated solution are shown inFigure 5.1.2.
Figure 5.1.2: Expectation (left) and variance (right) of the final approximation uN,h,p.
They have been computed as described in (3.1.5) with p = (5, 5). Reasonably thesame results can be recovered by means of the Smolyak formula (3.2.7).
To investigate the convergence of the full tensor product method we vary the poly-nomial degree of the space Pp(Γ) defined in Section 3.1. We may estimate the errorin each direction separately. Namely we choose the mth direction, we keep fixed all
54

the other ones and we plot the H10 -norm of the error between uN,p,h and uN,p,h where
p = (p1, ..., pm + 1, ..., pN ). Thus we study the decay of
‖Eρ(uN,p,h)− Eρ(uN,p,h)‖H10 (D)
versus pm for m = 1 and m = 2, respectively.
Figure 5.1.3: The relative H10 (D)-norm error of the expectation of uN,p,h when we mod-
ify the polynomial degree pm.
The numerical results reflect the theoretical ones. Indeed from Lemma 4.3.1, we ex-pect the error to decrease exponentially fast as the polynomial degree increases.
Now we investigate the computational error of the expectation in the L2(D)-normwhen we increase both the polynomial degree and the number of random variables inthe Karhunen-Loève truncated expansion (5.1.1). In this example we have chosen equaldegree of the polynomial space in all the N directions, i.e. pm = p for all m = 1, ..., Nand at each step we have increased p. Figure 5.1.4 exhibits the error versus the numberof collocation points Np which is given by
Np = (p+ 1)N .
The plot reveals, in accordance with Theorem 4.2.6, (sub)exponential convergence ofthe error when the polynomial degree increases. On the other hand, the convergencerate deteriorates by a factor of 1
N as N increases. Indeed in terms of the number ofpoints Np the convergence rate behaves like
C(rmin, N)e−rminN1/Np .
Hence the log of the error decays like −N1/Np .
We may conduct a similar analysis for the sparse tensor product method. In this casewe will modify the level w which indirectly acts on the polynomial degree as depictedin (3.2.6). Consequently we will have that the total number of collocation points used
55

Figure 5.1.4: The relative L2(D)-norm error of the expectation of the final approxima-tion computed by the full tensor product rule for N = 3, 5, 6.
at each step is equal to
Np =∑i∈NN+
w+1≤|i|≤w+N
N∏m=1
t(im), t(im) =
1, im = 1
2im−1 + 1, im ≥ 2.
The following bound has been shown in [12, Lemma 3.17]:
w ≥ logNp
ζ + logN− 1
where ζ ≈ 2.1. Moreover in Theorem 4.2.8 we proved the following convergence ratefor the sparse method
C(rmin, N)e−rmin
2w.
Combining these two results we can conclude that the error in terms of the number ofcollocation points is bounded by
C(rmin, N)e− rmin
2logNplogN .
Therefore we expect an outcome with logarithmic decays for the error, but with asmaller deterioration rate. Namely the log of the error decays like − logNp/ logN.We observe that for N = 2 the full tensor product method guarantees a slightly fasterconvergence than the sparse variant (Figure 5.1.5). On the other hand whenN becomesmuch bigger, the full tensor algorithm is affected by the curse of dimensionality.
56

Figure 5.1.5: A comparison of the relative L2(D)-norm error of the expectation com-puted with the full and the sparse method when N = 2.
We also examine the behaviour of the error related to the truncation of the Karhunen-Loève expansion of the diffusion coefficient a. In order to do this we fix both p and h andwe study the convergence of the error obtained increasing the value of N. In practicewe compare the approximation in the N -dimensional stochastic space to that one inthe Nmax-dimensional space, where Nmax is the maximum value of N among those weconsider in the implementation. The outcome is shown in Figure 5.1.6.In the theoretical discussion we provided a bound for ‖u − uN‖ in case of a diffusioncoefficient which depends linearly on the random variables. Nevertheless also in thisexponential truncation case, we expect the error to decrease as N increases. Rigorousrates of convergence should be investigated in future works.
Finally we are interested in comparing the results obtained by the stochastic collo-cation method to those coming from a Monte Carlo approach. The latter techniquediffers from the former for the choice of the evaluation points. Once we have fixed thenumber K of realizations (which corresponds to the number of collocation points inthe stochastic collocation method), we generate K vectors (y
(MC)k )Kk=1 of dimension N
uniformly distributed in [−√
3,√
3] (which correspond to the collocation points). Giventhe evaluation points, we approximate by the finite element method the solutions to de-terministic boundary value problems whose coefficients have been evaluated in each ofthe K samples. This step is in common with the stochastic collocation approach. Theexpectation of the approximated solution uN,K,h is then recovered by computing the
57

Figure 5.1.6: The relative L2(D)-norm error of the expectation of the truncated solutionversus the dimension of the random domainN . HereNmax = 9 and pm = 2for all m ∈ 1, ..., N.
sample average
Eρ(uN,K,h)(x) =1
K
K∑k=1
uN,h(y(MC)k ,x).
The numerical results show that the convergence rate for the Monte Carlo algorithmis quite slow compared to that one we get adopting the stochastic collocation method,both in its full or sparse version. As a matter of fact we expect the Monte Carlo error toconverge with an algebraic rate of 1/2 with respect to the number of samples.
58

Figure 5.1.7: The relative L2(D)-norm error of the expectation of the final approxima-tion computed by the Monte Carlo method and the full tensor productalgorithm for N = 2.
Figure 5.1.8: The relative L2(D)-norm error of the expectation of the final approxima-tion computed by the Monte Carlo method and the sparse Smolyak algo-rithm for N = 2.
59

5.2 Conclusions
The numerical examples presented in the previous section enlighten the effectiveness ofthe stochastic collocation method at least when the dimension N of the random space(or equivalently the number of terms in the truncated Karhunen-Loève expansion ofthe input data) is quite small. This effectiveness combined with the easiness of im-plementation, which makes use of available deterministic codes, is the strength of thestochastic collocation technique. It outperforms the Monte Carlo method, both in itsfull tensor product construction and in the sparse tensor product one. Neverthelessthe sparse version has to be preferred on the full method, especially for large values ofN , as it reduces considerably the curse of dimensionality while keeping a high level ofaccuracy.
Unfortunately, the presented implementation is not capable of dealing with sparsegrids of dimension N > 2. This limitation leaves open some important aspects like thevalidation of the effectiveness of the sparse tensor method in reducing the curse.
Further research has to be conducted also in the direction of anisotropic sparse ten-sor algorithms whose description has only been superficially treated in Section 3.2.1.Indeed if whereas the isotropic grid method works efficaciously with problems wherethe dependence on the random variables is equally weighted, the convergence rate getsworse when we try to approximate solutions of highly anisotropic problems which isthe case when we consider Karhunen-Loève expansions of the coefficients (comparewith Section 4.4). As a matter of fact in this case we have
τm =1
4√λm‖φm‖L∞(D)
and therefore the analyticity region Σ(Γm; τm) increases as m gets bigger.Future works should also investigate the balance between the truncation error anal-
ysed in Section 4.2.1 and the collocation error extensively examined in the second halfof Chapter 4. Indeed as we have shown the former error improves as N increases, butthe collocation error deteriorates in the same situation.
60

Summary
The purpose of this research project is to give an insight into the topic of the numer-ical approximation of elliptic partial differential equations with the property that thedomain of the functions in the problem is the Cartesian product of a spatial and a prob-abilistic domain which we will denote as D and Ω, respectively. This results from mod-elling the uncertainties in a physical system. This approach sounds reasonable if wethink at the unreliability and the numerous inaccuracies which pervade the real world.Mathematically we will deal with an equation taking the form
−∇ · (a(ω,x)∇u(ω,x)) = f(ω,x), (ω,x) ∈ Ω×D. (5.2.1)
Such a new kind of problem requires several tools needed for treating and eventu-ally solving equation (5.2.1). In particular one of the main difficulties consists of theinfinite dimensionality of the problem. Indeed whereas the spatial domain D is usu-ally a bounded subset of R3, in general the random domain Ω is infinite-dimensional.Thus the infinite-dimensional functions, which we model by the Karhunen-Loève ex-pansion, have to be truncated in order to be manipulated on a finite memory machine.This truncation already introduces an error in our study.
A further step involves the actual resolution, or more realistically approximation,of the model equation (5.2.1) appended with some conditions at the boundary of thespatial domain D. At this stage we would like to exploit established techniques (for ex-ample the finite element scheme) which already allow to deal with deterministic ellipticproblems, i.e. those where the domain is not probabilistic. In this direction the idea isto evaluate, with respect to the probabilistic variable, the coefficients of the problemat some suitably chosen points and subsequently to apply the finite element methodwhich gives an approximation of the solution in the space D for each of the points.The final approximation is recovered through the superposition of the spatial semi-approximations. This procedure is called the stochastic collocation method.
The approach is similar to the Monte Carlo algorithm but with a great difference inthe selection of points. The evaluation grid of the stochastic collocation method is notrandom as in the case of the Monte Carlo technique but it consists of zeros of somesuitable polynomials. This trick guarantees a much faster convergence in the errorbetween the exact solution and the approximation. Some numerical examples at theend of the thesis aim to show the effectiveness of this theoretical result.
61


Bibliography
[1] M. Reed and B. Simon. Methods of modern mathematical physics 1: Functional Analy-sis. Academic Press, 1972.
[2] J.B. Conway. A course in functional analysis. Springer-Verlag, 1985.
[3] P. Billingsley. Probability and measure. John Wiley & Sons, 1995.
[4] P. Erdos and P. Turan. On Interpolation I. Annals of Mathematics, Second Series,Vol. 38, No. 1, 1937.
[5] J.V. Uspensky. On the Convergence of Quadrature Formulas Related to an Infinite Inter-val. American Mathematical Society Vol. 30, No. 3, 1928.
[6] J.P. Boyd. Chebyshev and Fourier Spectral Methods. 2000.
[7] R.A. DeVore and G.G. Lorentz. Constructive approximation. Springer-Verlag, 1993.
[8] E. Hille. Contributions to the theory of Hermitian series. II The representation problem.International Journal of Mathematics and Mathematical Sciences, Volume 3, 1980.
[9] S. Brenner and R. Scott. The Mathematical Theory of Finite Element Methods. Springer,2008.
[10] J.P. Boyd. Asymptotic Coefficients of Hermite Function Series. 1983.
[11] I. Babuska, F. Nobile and R. Tempone. A Stochastic Collocation Method for EllipticPartial Differential Equations with Random Input Data. Society for Industrial and Ap-plied Mathematics. 2007.
[12] I. Babuska, F. Nobile and R. Tempone. A sparse grid stochastic collocation methodfor partial differential equations with random input data. Society for Industrial andApplied Mathematics. 2008.
[13] W. Johnston. The Weighted Hermite Polynomials Form a Basis for L2(R). TheAmerican Mathematical Monthly. 2014.
[14] C. Schwab, R.A. Todor. Karhunen-Loève Approximation of Random Fields byGeneralized Fast Multipole Methods. Seminar für Angewandte Mathematik ETH.2006.
[15] G. Szegö. Orthogonal Polynomials. American Mathematical Society. 1939.
63