Embed Size (px)
DESCRIPTION
Breve exposição sobre a dinâmica do pêndulo matemático baseada no livro clássico Bowman, F. Introduction to Elliptic Functions, with Applications. New York: Dover, 1961.
Citation preview

O PÊNDULO MATEMÁTICO E AS FUNÇÕES ELÍPTICAS
Lossian B. B. Miranda
IFPI – Coordenação de Licenciatura em Matemática / [email protected]
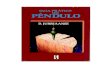
Introdução Considere um pêndulo matemático de haste de comprimento fixo � com centro de massa girando ou oscilando sobre a circunferência conforme figura 1. Para cada instante de tempo � a haste faz um ângulo ���� com a reta vertical, com ���� sendo positivo no sentido anti-horário e negativo em sentido horário.
Figura 1 Pela segunda lei da mecânica clássica temos: (1.1) –������� � ��� . O sinal negativo em (1.1) significa que quando ����� � � a aceleração angular é negativa e reciprocamente. EXERCÍCIO 1. Prove a afirmação imediatamente acima [Sugestão: faça inspeção caso a caso para todos os quadrantes do ciclo trigonométrico nas duas orientações. São oito situações, pois para cada um dos quadrantes temos dois sentidos, a saber, horário e anti-horário]. Como a massa � é não nula, podemos cancelar � na equação (1) e isto significa que a equação resultante (1.2) � � � �� ����� independe da massa, e o movimento pendular não se modifica caso a massa varie.

Os três movimentos e os dois equilíbrios
Para melhor fixar as idéias, iniciemos nossa contagem temporal quando a massa � passa pelo ponto mais baixo, ou seja, consideremos ���� � � e ���� � ��, com ���� sendo o módulo da velocidade tangencial no instante de tempo �. Pela lei de conservação da energia temos: (1.3)
�� ��� � �� ����� ������ � �������.
Substituindo ������ por � � ��� �� em (1.3), temos:
(1.4) ����� � ��� � ����� ��.
Usando-se a notação �� � �� e observando que ���� � ��� , temos
(1.5) ��� � ���� !"#�� � �� ��$�� �.
Como posteriormente usaremos funções elípticas e esta teoria já tem uma notação tradicional desde 1823, façamos a notação
(1.6) % � & !"#��. Notemos que % ' � ( �� ��� ' ����, % � � ( �� ��� � ���� e % � � ( �� ��� �����. Ou seja, se % ' � temos oscilação, % � � movimento assintótico (homoclínico) e % � � rotação. Assim, têm-se três tipos de movimentos para serem estudados. OSCILAÇÃO (% ' �. Energia cinética máxima menor que a energia potencial máxima).
Quando o ângulo máximo relativo a uma oscilação é atingido a velocidade tangencial se anula. Denotemos por ) * +�, -. este ângulo. A substituição de ���� � � e ���� � ) em (1.4) nos dá
(1.7) �� /� � !"#�� �012$ %�.
Por outro lado, (1.5) nos fornece �3� � 4 5�
�&6"7891":", Que com a mudança de coordenada ; � <=���>6 � ��� fornece
�3� � 4 5?@>76"891"?,
e esta última, integrada de � a �, nos dá

(1.8) A �3� � 4A 5?@>76"891"??�$� � ��. COMENTÁRIO: Neste momento faremos uma pausa para desenvolver os rudimentos da teoria das funções elípticas de Legendre-Jacobi necessários para, a partir da identidade (1.10), encontrarmos ���� Como uma função explícita do tempo �. Historicamente, as funções elípticas surgiram, quase que simultameamente, a partir de três grandes problemas científicos, a saber: i) cálculo de integrais indefinidas de funções racionais; ii) cálculo do comprimentos de uma elipse com qualquer excentricidade; iii) cálculo da solução da equação do pêndulo matemático. Posteriormente estas três visões inicialmente distintas se fundiram numa teoria única e daí, generalizou-se para o domínio dos números complexos. Hoje se tem uma vasta e importante teoria matemática com fortes aplicações em vários ramos da física.

Funções elípticas (conceitos básicos) Consideremos a integral definida
(A1.1) B � A 5CD>7C"C� .
Note que B � B�E� é a integral do inverso da área do círculo trigonométrico da figura abaixo (figura 2). 1 x x 1 -1 -1 Figura 2 Neste caso, imediatamente vê-se que B�E� é função inversível para EF.�, �+. Isto nos permite colocar x em função de B. De fato, do cálculo integral sabemos que B �<=��E e daí temos E � �B. Por volta de 1823, Niels Abel, tentando encontrar a solução da equação do pêndulo matemático, foi levado à equação (1.10). Ele foi levado
a fazer o estudo da função dada por B � A 5?@>76"891"??� . Visto que B � B�;� é função
crescente, Abel foi induzido a investigar como seria a inversa de B � B�;�, ou seja, como deveria ser a variação de ; � ;�B� como função de B. Mais precisamente, tendo em conta que a mudança de coordenada E � �;, através da integração por mudança de variáveis, nos leva à identidade
(A1.2) B � A 5?@>76"891"??� � A 5C@�>7C"��>76"C"�C� , com E � �;,
Abel levantou o questionamento de como deveriam ser as funções E � E�B� e ; �;�B�. Jacobi usou a notação ; � <��B� e denominou tal função por amplitude de B. Como E � �;, E � E�B� foi denotada por Jacobi como E � ��<��B��. Jacobi também definiu: ��; � GHIJ�<��B��; K�;� � KL<��B�M � @� � %���; =@� � %����<��B�� . Gudermann, professor de Karl Weierstrass, propôs a notação atual:

(A1.3) N E � �; � �BD� � E� � ��; � ��BD� � %�E� � K; � 3�BO A função ��B� � �B chama-se seno elíptico, a função ��B, cosseno elíptico e a função 3�B não tem nome. TEOREMA 1 (Características analíticas das funções elípticas). Para as três funções elípticas básicas acima definidas vale as identidades ��B � ���B � � e 3��B �%���B � �. Além disso, temos:
i) 55P �<��B�� � 3�B;
ii) 55P ��B� � ��B;
iii) 55P ���B� � ��B3�B;
iv) 55P �3�B� � �%��B��B.
(A1.4).
Demonstração: (i) 55P �<�B� � 5?5P �B� � >QRQS �0TUVJ9J�W>X�� >Y
&YZ["\]^"S� @� � %���; �
D� � %�E� � 3�B;
(ii) 55P ��B� � 55P ��;� �0_9�`aJ5aJba59ca ��; 5?5P � ��B3�Bd
(iii) 55P ���B� � 55P ���;� �0_9�`aJ5aJba59ca � �; 5?5P � ��B3�Bd
(iv) 55P �3�B� � 55P �K;� � 55P e�� � %���;�Y"f � >� +� �%���;.7Y" g� � %���;��; 5?5Ph � >� >51P +��%��B��B3�B. � �%��B��B.
As demonstrações de ��B � ���B � � e 3��B � %���B � � são óbvias, decorrendo diretamente de (A1.3). PROPOSIÇÃO 1 (Características numéricas das funções elípticas). Para s funções elípticas valem as igualdades:
(i) �� � �; (ii) ��� � �; (iii) 3�� � �; (iv) <���B� � �<�B; (v) ���B� � ��B; (vi) ����B� � ��B; (vii) 3��−u)=dnu.
Demonstração: (i) Se B � � então � � A 5?@>76"891"??� , e como o integrando é positivo, ; � �. Deste modo, �� � �. (ii) Analogamente ao caso (i), ; � �, e daí, ��� � ��� � �. (iii) Analogamente, 3�� � D� � %���� � �.

(iv) <��B� � ;. Como B � A 5?>76"891"??� , se trocarmos o sinal de u,
deveremos trocar o sinal de ; para que haja identidade. Assim, ; � <���B� � �; ��<�BX (v) ���B� � ���;� � ��; � ��B. (vi) ����B� � GHI��;� � ��; � ��B.
(vii) 3���B� � K��;� � @� � %�����;� � J@� � %���; �3�B. COMENTÁRIO. Por jogar um importante papel na teoria das funções elípticas, a integral definida
(A1.5) i�%� � A 5?@>76"891"?jk��
Merece destaque especial. Notemos que se na identidade (1.10) tomarmos � para ser a quarta parte do período l�%� da oscilação, teremos que o ângulo máximo
correspondente será ). Da igualdade �; � ��>6 � ���, vê-se que quando � � ),
então ; � -k�. Assim, quando � Varia de – ) a ), ; varia de –-k� a -k�. Conseqüentemente, de (1.10) teremos A 5?@>76"891"?jk�� � mT�6�# . Logo, o período da oscilação do pêndulo é dado por
(A1.6) l�%� � #m A 5?@>76"891"?jk�� � #n�6�m
Notemos que l��� � �jm e l��� � �o, como era de se esperar.

Agora, retornemos à identidade (1.10). Da teoria das funções elípticas acima esboçada temos
(1.9) �;��� � ����, %� �012$apq2sn(���.
De �;��� � ��>6 � ��� e de (1.11) resulta
(1.10) ���� � �<=���%����, %��.
Esta última expressão derivada em relação ao tempo � dá-nos
(1.11) �� � �%������, %�. Portanto, as duas curvas-solução 4rsJt u t� (nos dois sentidos, anti-horário e horário)
de condição inicial, em módulo, �����, �� ��� � ��, !� �, são dadas por
(1.12) 4r��� � 4��<=��L%����, %�M, �%������, %��, com % � & !"#�� . EXERCÍCIO 2. Faça a expansão da função T(k) em série de Taylor até a ordem 3. Usando o programa graphmath, ou outro, faça o gráfico do correspondente polinômio de grau 3. Qual o valor que este polinômio dá para o período quando � � v,wJ�k�, �� � �,�J�k e � � �,�J�? Calcule, também, T(0) e T(1), neste caso. MOVIMENTO HOMOCLÍNICO (% � �. Energia cinética máxima igual à energia potencial máxima).
Fazendo-se % � � em (1.8) temos 4��3� � � �� 3�, cuja integração de �J a �J nos dá 4��� � A � ���� 3�. Do cálculo integral sabemos que A � ���� 3� � +�xyJ�� �� ��� ���.�� J. Disto segue 4�� � xyJ�>z891:"b28:" � e pela definição de logaritmo, >z891:"&>7891":" �4m$. Quadrando esta última obtemos uma equação do segundo grau na variável
independente � �� , cujas soluções são:
i) � �� � �� { � � �-J, �Jímpar;
ii) � �� � 94"|}7>94"|}z> � 94|}79~|}94|}z9~|} �059�c1cpq2 ����4���. A primeira refere-se ao ponto fixo instável e a segunda nos dá, devido à imparidade das funções envolvidas,
(1.13) ���� � 4�<=��+�������.J. Derivando-se esta última pela regra da cadeia temos
(1.14) �� � 4�I�G�J����.

Em síntese, para este movimento, temos as duas curvas-solução 4rsJt u t� dadas por
(1.15) 4r��� � g����, �� ���h � 4��<=��+�������., I�G�J�����,
com � � @�k� e % � � � ���k���. EXERCÍCIO 3. Use o teorema 1 e a proposição 1 para provar que para as funções elípticas valem as seguintes expansões em série de Taylor:
a) ��B, %� � B � >� �� � %��B� � >>�� �� � ��%� � %#�B� ��
b) ���B, %� � � � >�B�+>�# �� � �%��B# � >��� �� � ��%� � ��%#�B� ��
c) 3��B, %� � � � >�%�B� � >�# ��%� � %#�B# � >��� ���%� � ��%# � %��B� ��
Use estes desenvolvimentos em série de Taylor para desenvolver também em série de Taylor as curvas-solução 4r��� � 4��<=��L%����, %�M, �%������, %�� e 4r��� �g����, �� ���h � 4��<=��+�������., I�G�J����� dos movimentos oscilatórios e
homoclínico. ROTAÇÃO (i � �. Energia cinética máxima maior que a energia potencial máxima).
Como % � & !"#�� � �, consideremos %� � >6 �X De �� � ��� g !"#�� � �� ��h ����J�J�>6� �J� � �� ��� - note que esta é a equação (1.5) – segue
(1.16) 4m5$6� � Q:"&>76� "891":" J.
Fazendo-se a mudança de coordenadas ; � �� �, teremos 4m$6� � A m5$6�$� J=
A Q:"&>76� "891":"�� � A 5?@>76� "891"??� ·, resultando
(1.17) �; � � �� � � g4m6� �, %�h � 4��%��, >6� e daí
(1.18) ���� � �<=���4��%��, >6��. Por outro lado, derivando (1.19) em relação ao tempo teremos ;� ��;��� ��%�� g%��, >6h 3��%��, >6� e, por (A1.3), desta última resulta ;� �� g%��, >6h ��%�� g�%�, >6h 3���%�, >6�. E daí segue ;� � ���� � �%3��%��, >6�, ou seja:

(1.19) ����� � ��%3���%�, >6�. Em síntese, as curvas-solução da rotação são 4rsJt u t� dadas por:
(1.20) 4r��� � g����, �� ���h � 4��<=�� �� g%��, >6h� , %�3��%��, >6��.