Embed Size (px)
Citation preview

Software manual Mobile 3D Smart Sensor
O3M151 O3M251 O3M161 O3M261
Basic Function
7063
80 /
02
12 /
2016
UK

3D Smart Sensor Basic Function
2
Contents1 About these instructions � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �3
1�1 Symbols used � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �31�2 Safety instructions � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �31�3 Other applicable documents� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �3
2 3D Smart Sensor � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �42�1 Functions � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �42�2 Measuring principle � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �52�3 Operating check � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �62�4 Installation position � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �6
3 Basic Function � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �73�1 Functions � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �7
3�1�1 Dimensionality of the ROI� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �73�1�2 Size, number and grouping of the ROI� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �83�1�3 Output� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �83�1�4 Examples � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �83�1�5 Averaging over time � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �9
3�2 Possible applications � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �9
4 Mobile 3D Smart Camera � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �104�1 2D/3D overlay functions � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �10
4�1�1 Icons/Graphics � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �104�1�2 Polygons/Polylines/Ellipses � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �104�1�3 Texts � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �10
4�2 Variant-specific overlays� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � 114�3 Use of logical outputs for representation of graphical objects � � � � � � � � � � � � � � � � � � � � � � � � � � � �124�4 Setting up the event-based display � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �124�5 Use of diagnostics within the sensor for representation of graphical objects � � � � � � � � � � � � � � � � �13
5 Commissioning � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �14
6 Application examples � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �156�1 Access monitoring � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �15
6�1�1 Introduction� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �156�1�2 Installation options � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �156�1�3 Parametrisation � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �176�1�4 Data output � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �186�1�5 Operating property/performance � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �18
6�2 Approaching aircraft with supply vehicle� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �196�2�1 Introduction� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �196�2�2 Attachment options� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �196�2�3 Parametrisation � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �206�2�4 Relevant output � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �206�2�5 Operating property/performance � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �20
6�3 Level monitoring in a silo � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �216�3�1 Introduction� � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �216�3�2 Installation options � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �216�3�3 Parameterisation � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �216�3�4 Relevant output � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �226�3�5 Operating characteristic / performance � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �22
7 Parameters � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �23
8 Interface � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �248�1 CANopen � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �248�2 SAE J1939 � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �54
This document is the original manual�
Licences and Registered TrademarksMicrosoft®, Windows®, Windows XP®, Windows Vista® and Windows 7® are registered trademarks of the Microsoft Corporation� All trademarks and company names are subject to the copyright of the respective companies�

3
3D Smart Sensor Basic Function
UK
1 About these instructionsThese instructions explain the 3D Smart Sensors Basic Function�
For a detailed description of the device, please read the Operating instructions of the sensor and the Software manual of the ifm Vision Assistant� → "1�3 Other applicable documents"
1.1 Symbols used
► Instruction> Reaction, result→ Cross-reference
Important note Failure to observe can result in malfunctions or faults�Information Additional note
1.2 Safety instructionsRead the Operating instructions before putting the device into operation� Make sure that the device is suitable for the applications concerned without restriction�
Disregarding operating instructions or technical information can result in injuries and/or damage�
1.3 Other applicable documents
Document Description
Device manual Operating Instructions of 3D Smart Sensor
Software manual Operation instructions of the operating software ifm Vision Assistant
Quick guide Quick guide on operating the 3D Smart Sensor
The documents can be downloaded at: www�ifm�com

3D Smart Sensor Basic Function
4
2 3D Smart Sensor2.1 Functions
The 3D Smart Sensor is an optical system which measures the distance between the sensor and the next surface� An additional illumination unit illuminates the scene and the sensor processes the light reflected by the surface�
The 3D Smart Sensor is optimised and matched to requirements and needs on mobile driven machines� It is intended for use in outdoors and for difficult ambient light situations�
The principle is based on pdm technology for outputting 3D image data� In addition to new options for vehicle automation (AGV, automated guided vehicle), it also provides new assistance functions for automation tasks�
Communication is possible via Ethernet or CAN� System parametrisation and monitoring of the 3D data are carried out via the ifm Vision Assistant. → ifm Vision Assistant Software manual
The pre-processed functional data are output via the CAN bus, with via CANopen or SAE J 1939� → Chapter "8 Interface" on Page 24
The Basic Function with functions such as measurement of minimum, maximum and average distance are available for simple distance tasks�
The Object Detection function provides for automatic object detection of up to 20 objects� This function can, for example, be used as a collision warning�
The 3D Smart Sensor O3M2xx is equipped with an additional 2D camera� The camera image can be transmitted to a suitable video display via an S-Video output�

5
3D Smart Sensor Basic Function
UK
2.2 Measuring principleThe device measures according to the light runtime method based on a phase measurement with modulated light�
Based on this principle, the following points must be taken into account during the measurements:
● Clean sensor window
– Cleanliness is a basis for the reliable operation of optical sensors� Dirt or liquids reduce the light transmission and cause light scatter� This effect can affect the resolution and the measuring range of the sensor system�
– Water droplets on the sensor glass can lead to unclear detection of the scene� The objects are recognised to be larger than they are in reality�
► Installation in areas of the system which become heavily soiled must be avoided�
► Keep sensor window clean�
● Illumination/Range
– The measurement of objects is carried out based on the active illumination by the additional illumination unit� The emitted infrared light makes the sensor virtually independent of the ambient lighting conditions� Strong sunlight can result in restrictions in the system range due to increased signal noise�
– The measurement range is dependent on the reflectivity of the object to be detected�
– Due to the optical measuring principle the system performance can be considerably increased by using reflective materials (Factor 3)�
● Clear in immediate vicinity
– Objects in the immediate vicinity (1 m distance) can falsify the measured values of the sensor�
– The wall on which the sensor is mounted should not be within the sensor area�
► Keep clear the illuminated area of the illumination unit in the immediate vicinity (up to 50 cm) of attached parts�
3D SmartSensor
Illuminationunit
3D SmartSensor
Illuminationunit

3D Smart Sensor Basic Function
6
2.3 Operating checkWith an optical system, detection faults can occur in case of poor visibility (e�g� under very dense fog, a great deal of dust, very heavy snowfall, etc�)� The 3D Smart Sensor is equipped with sensory fault detection in the system and generates a message when faults occur:
● The "Blockage Detection" function actively detects relevant soiling, condensation on or icing-up of the sensor� (This function is not yet available in SW versions OD 2�2�4 and OD 2�2�5� This function will be offered for activation in a later firmware update�)
● The "Diffuse Scene" function actively detects diffuse faults, such as dense fog or clouds of dust in the sensor area�
For internal diagnosis of the hardware, refer to the Operating Instructions�
● Application-specific solutions can be achieved simply and especially conveniently with a controller (e�g� CRO4OX series) or display (e�g CR108X) based on the functional output� There are special CODESYS libraries for receiving and interpreting the CAN signals of the 3D Smart Sensor� In addition, various application examples on a CODESYS basis are also available� → www.ifm.com → Downloads
2.4 Installation positionThe following aids are available for positioning the 3D Smart Sensor in dependence on the application:
● Calculation tool for calculating the detection range
● ifm Vision Assistant operating software
● Technical data with performance and values of detection range in data sheet

7
3D Smart Sensor Basic Function
UK
3 Basic Function
3.1 Functions
Distance monitoring with minimum distance
Positioning aid
Monitoring region
The Basic Function is the standard firmware of the 3D Smart Sensor�
This application permits the use of 3D data via a CAN interface�
A Region of Interest (ROI) is defined for the measurements which the sensor is to monitor; within this region the distance to the nearest object is always output as information to the machine controller�
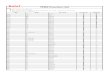
3.1.1 Dimensionality of the ROIAn ROI can be defined as two-dimensional or three-dimensional:
● A 2D ROI can be set up quickly and easily, but is subject to the effects of perspective:
– Objects that are very close in the ROI are not fully sensed�
– As the range increases the ROI becomes larger�
– The angle of view of the ROI cannot be restricted� Depending on the application very close or very distant objects can distort the result�
● Setting up a 3D ROI is more complex but offers the following advantages:
– The monitoring region can be spatially restricted by inputting dimensional limits into the region�
– The effects of perspective can be eliminated by suitable definition of the 3D ROI�
2D 3D
ROI ROI

3D Smart Sensor Basic Function
8
3.1.2 Size, number and grouping of the ROI ● An ROI has 1 to 1024 pixels�
● 64 ROIs can be defined via the CAN interface� The definition process allows the assignment of each ROI to its own ROI group�
● The group assignment can be changed so that several (even isolated) ROIs can be associated in a common ROI group�
● ROIs and ROI groups can be defined so that they overlap (→ "6�3 Level monitoring in a silo")�
3.1.3 OutputThe output is specified by the output value and the reference value�
● Output value: The output value can be defined separately for each ROI group:
– nth minimum value in the ROI group (1st min up to the 5th min)
– nth maximum value in the ROI group (1st max up to the 5th max)
– Average value in the ROI group (Avg)
– Median value in the ROI group (Median)
– Percentile value in the ROI group (Percentile)
● Reference value: For all ROI groups, the reference values can be specified as dependent on each other or independent of each other�
– Dependent: Every spatial coordinate (x, y, z) and the amplitude (A) can be specified as a reference value� For each pixel to which the reference value and output value are applicable (e�g� reference value: x, output value: min), all other data of the pixel (e�g� y, z, A) are output�
– Independent: All spatial coordinates and the amplitude are processed independently of each other� If for instance the minimum value is specified as the output value, the minimum values are output independently of the pixel to which they relate� No other spatial coordinates or amplitudes are output�
3.1.4 Examples
x = 7
y = 12
z = 3
A = 6
6
6
6
6
x
y
z
x = 1
y = 3
z = 5
A = 2
1
1
1
1
x = 4
y = 8
z = 3
A = 3
2
2
2
2
x = 6
y = 5
z = 2
A = 1
3
3
3
3
x = 3
y = 12
z = 5
A = 4
5
5
5
5
x = 5
y = 9
z = 1
A = 10
4
4
4
4
Example with 7 pixels in an ROI group, each with the spatial coordinates x, y, z and amplitude A (units freely selectable)�
Output value Reference value Output Description
1st min x (x1, y1, z1, A1) x1 = 1 is the smallest value in the x direction
2nd min x (x5, y5, z5, A5) x5 = 3 is the second smallest value in the x direction
1st max z (x1, y1, z1, A1) and (x5, y5, z5, A5) z1 = z5 = 5 is the largest value in the z direction

9
3D Smart Sensor Basic Function
UK
Output value Reference value Output Description
Avg – (x, y, z, A) The average values can only be determined independently for all dimensions
Percentile = 30%
A (x5, y5, z5, A5) 30% of the values (A1, A2 and A3) have an amplitude < 4 = A5
min Independent (x1, y1, z4, A3) Irrespective of the ROI to which the pixels relate, these values are the minimum values across all pixels
3.1.5 Averaging over timeFor averaging over time the average value of the valid pixels is calculated�
● If in the course of time pixels become invalid they are no longer included in the calculation of the average value�
● If in the course of time other pixels become valid they are included from that point in time in the calculation of the average value�
The use of averaging over time reduces noise� This does not affect the status of pixels (valid/invalid)�
The pixel status can be improved with intelligent averaging� Intelligent averaging should be used unless there is a compelling reason to the contrary (→ Operating Instructions).
3.2 Possible applicationsThe basic function of distance measurement can be used in many applications:
● Fill level measurement in large silos or tanks
● Height determination of, for example, plant height
● Area monitoring for change
● Access monitoring (e�g� open spaces and doors, position determination, lorry positioning on a loading ramp)
● Distance check, approach (automatically guided or assisted) of supply vehicles for aircraft, loading and refuelling, e�g� in harbours and at airports�
● Driverless transport vehicles
When an ifm controller or ifm display is used, the CODESYS module supplied can be used for reception and interpretation of the CAN signals�
Program examples in CODESYS can be downloaded at: www�ifm�com → Downloads

3D Smart Sensor Basic Function
10
4 Mobile 3D Smart CameraIn addition to their 3D sensor functionality, variants O3M251 and O3M261 contain a 2D camera with analogue PAL video output and integral graphics processor� This permits an integrated overlay functionality of the 3D results directly in the 2D image, and in addition permits the display of (warning) instructions or customer-specific texts based on events sensed by the 3D sensor�
The ifm Vision Assistant is available for setting up the overlay� The ifm Vision Assistant Software manual describes the set-up steps in detail (→ ifm Vision Assistant Software manual).
4.1 2D/3D overlay functionsThe mobile 3D Smart Camera offers various functions for generation of an overlay� The ifm Vision Assistant operating software offers a convenient means of setting up of these overlays�
The following general functions are available in all the software variants of the mobile 3D Smart Camera:
4.1.1 Icons/GraphicsIcons/graphics can be displayed at a pre-determined position in the 2D image either continuously (e�g� company logos) or in response to an event triggered by the sensor� In response to an event means that the sensor displays an icon such as a warning symbol depending on a specific distance from an obstruction�
The icons or graphics must have been saved at the sensor at a prior time� This can be done using the ifm Vision Assistant operating software� The formats supported are �PNG (recommended), �JPG, �GIF and �ICO�
In addition the display and hiding of icons can be activated via the CAN bus� This is done by a controller (such as the machine controller) sending a CAN message directly to the sensor� The positions of the graphics for this are freely selectable and can be changed at any time, more or less in real time�
4.1.2 Polygons/Polylines/EllipsesSimple graphical elements can be defined in various colours, line widths and transparencies� These elements can also be displayed by the sensor at a predetermined position in the 2D display, continuously or in response to events� Alternatively these elements can also the created and positioned via the CAN bus�
4.1.3 TextsTexts can be defined as required in various colours, transparencies, sizes and with a coloured background� These can be displayed by the sensor at a predetermined position or on a dynamic 3D visualisation in the 2D image, either continuously or in response to events�
Wild cards can be included in the texts and replaced with the actual measured results when in productive operation� This may for instance be a distance value or a position value�
Texts can in addition be sent via CAN messages to the sensor for display in real time� If necessary wild cards can also be used here for the actual measurement results�

11
3D Smart Sensor Basic Function
UK
Example of the use of a company logo, fixed displayed texts and simple graphics elements
4.2 Variant-specific overlaysIn addition to the general functions, variant-specific overlays can be set up� In the Basic Function variant this is the display of the defined ROI� For all ROI groups, the live-results (x, y, z, amplitude) can be used as wild cards in the text fields�
3D ROIs can be displayed as a frame box in the overlay� The actual measured x-value (distance) can be displayed as a transparent “wall” which moves with the distance value� The distance value is displayed live on this moving “wall”�
Display of four 3D ROIs in the 2D/3D overlay with live distance values

3D Smart Sensor Basic Function
12
4.3 Use of logical outputs for representation of graphical objectsDefined logical outputs of the 3D function can be used to draw graphical objects or colour them� In the following example the ROI overlays are coloured red because in this example the object is within the parameterised minimum distance of 2 m for switching the logical function� In addition the warning symbol and the warning text are displayed�
Use of the logical output for dynamic changes to the colour, a symbol and a text
4.4 Setting up the event-based displayEvent-based display can easily be set up using the ifm Vision Assistant� The following figure provides an example� The exact parameterisation steps are described in the ifm Vision Assistant Software manual�

13
3D Smart Sensor Basic Function
UK
4.5 Use of diagnostics within the sensor for representation of graphical objectsTexts or icons can be displayed on the basis of diagnostics within the sensor� This may for instance be appropriate if the view of the sensor is obstructed or the sensor has diagnosed an internal fault� The following figures show examples for visualisation�

3D Smart Sensor Basic Function
14
5 CommissioningThe 3D Smart Sensor can be operated with various functions� For information on updating the firmware → ifm Vision Assistant Software manual
► Make sure that the correct firmware is loaded on the sensor�
► Carry out commissioning with ifm Vision Assistant operating software�
For additional instructions on the sensor update with the ifm Vision Assistant → ifm Vision Assistant Software manual

15
3D Smart Sensor Basic Function
UK
6 Application examples6.1 Access monitoring
6.1.1 IntroductionThe Basic Function permits the monitoring of an area in front of a door/entry, and permits control or signalling of the opening of that door by the controller on the basis of CAN sensor signals�
Similar applications, such as the monitoring of the access to machines that can be stepped on, can be solved analogously�
6.1.2 Installation options
If multiple 3D Smart Sensors are used with overlapping fields of view, these can interfere with each other in those areas� This is particularly evident at greater variations of distance� Countermeasures are described in the Operating Instructions�
Install 3D Smart Sensors so that the wall on which they are mounted does not come within the field of view�
For an access control application the sensor is installed in a static position� Depending on the area to be monitored, two different installation positions are possible:
● Installation from above (A): The sensor is looking downwards�
– The sensor is installed above the door and looks down on the area it is monitoring�
– The sensor should be installed as high as possible so that the field of view will be a wide as possible (→ data sheet).
● Frontal installation (B): The sensor is looking straight ahead (not directly at the ground)�
– Alongside the door
– Opposite the door

3D Smart Sensor Basic Function
16
A
B
z
x
Attachment position of sensor for access monitoring, side view
A: Attachment from aboveB: Frontal attachment
The sensor with illumination unit can be rotated (to the horizontal) in order to match the field of view to the area to be monitored�
DC
y
x
24° 70°
Attachment direction of sensor, view from above
C: Vertical attachmentD: Horizontal attachment
For attachment planning → Chapter "2�4 Installation position" on Page 6
Enter mounting position values in the ifm Vision Assistant operating software�

17
3D Smart Sensor Basic Function
UK
6.1.3 Parametrisation
For detailed documentation of the settings and parametrisation of the device → ifm Vision Assistant Software manual
Frame rate ► Set the frame rate to 50 Hz�
> When using the recommended 50 Hz mode and a rotated attachment, the system temperature range is limited to -40 °C/+70 °C� The system has an integrated temperature monitoring function and switches into a pure communication mode in case of an overtemperature�
ROI (Region of Interest) ► Measure the region to be monitored within an ROI group, consisting of one or more ROI(s)�
> More than one ROI is used for large regions�
max max
ROI ROI
Passage monitoring from above with an ROI
Passage monitoring with and without an ROI (ifm Vision Assistant)A: Monitoring region without an ROIB: Monitoring region with multiple ROIs
For installation from above: ► Set the output (output mode) to “z”, and output value (output value type) to “maximum”�
> Objects which enter into the ROI generate respective values (heights above the ROI floor), to which the ROI can respond based on the threshold value�

3D Smart Sensor Basic Function
18
Averaging over time ► Depending on the response time of the system, choose the type of averaging over time:
– short averaging (≤3 frames) generates more noise, slack adherence to the threshold value, quick responses and a higher sensitivity;
– long averaging (≥3 frames) generates less noise, close adherence to the threshold value, slow responses and fewer false detections�
Excessive load on the CAN bus can lead to a reduction in the setting of the CAN output cycle Modulo (→ Operating Instructions).
6.1.4 Data outputThe CAN messages with the result value (e�g� Max z or Min/Max x) can be received on the controller used and compared with a stored threshold value (setpoint + (for max� setting) or - (for min� setting) tolerance)� A reaction (e�g� door control or warning signal) can result based on this�
See Output → Chapter "8 Interface" on Page 24�
6.1.5 Operating property/performance ● The detection performance is dependent on the distance, size and reflectivity of an object�
● For installation from above: The minimum detectable object height depends on the system parameterisation� Under the worst conditions this is 50 cm� The typical detectable object height is approx� 10 cm�

19
3D Smart Sensor Basic Function
UK
6.2 Approaching aircraft with supply vehicle
6.2.1 IntroductionThe Basic Function enables distance monitoring when a supply vehicle is approaching an aircraft�
The operator can move the vehicle very close to the aircraft without visual contact� The same applies to transportable stairways at airports etc�
6.2.2 Attachment options ► Attach 3D Smart Sensor horizontally with a small pitch angle so that it faces the aircraft vertically�
► Position the 3D Smart Sensor as far back as possible on the vehicle to view the relevant area�
Avoid angled attachment to prevent poor vision and reflection�
► Mounting position values in the ifm Vision Assistant operating software�

3D Smart Sensor Basic Function
20
6.2.3 ParametrisationFrame rate
► Set the frame rate to 50 Hz�
> When using the recommended 50 Hz mode and a rotated attachment, the system temperature range is limited to -40 °C/+70 °C� The system has an integrated temperature monitoring function and switches into a pure communication mode in case of an overtemperature�
ROI (Region of Interest) ► With larger areas, more than one ROI is used�
Time averaging ► Depending on the response time of the system, choose the type of averaging over time:
– short averaging (≤3 frames) generates more noise, slack adherence to the threshold value, quick responses and a higher sensitivity;
– long averaging (≥3 frames) generates less noise, close adherence to the threshold value, slow responses and fewer false detections�
► Because of the slow speed of approach to the aircraft (<10 km/h) a long period of 5 frames should be set�
The pixel status can be improved with intelligent averaging� Intelligent averaging should be used unless there is a compelling reason to the contrary (→ Operating Instructions).
Excessive load on the CAN bus can lead to a reduction in the setting of the CAN output cycle modulo (→ Operating Instructions).
6.2.4 Relevant outputThe CAN messages with the resulting value min� x can be received on the controller used and compared with one or more stored threshold values (setpoint+tolerance)� As a result, the driver can be informed optically or acoustically about the approach�
See Output → Chapter "8 Interface" on Page 24
6.2.5 Operating property/performance ● The detection performance is dependent on the distance, size and reflectivity of an object�
● Limits for the monitoring area (Min� range/monitoring area): at least 0�5 m
● Measuring accuracy: typically 5 to 10 cm in immediate vicinity (<5 m)

21
3D Smart Sensor Basic Function
UK
6.3 Level monitoring in a silo
6.3.1 IntroductionThe Basic Function permits the monitoring of the level of cohesive or adhesive material in a silo�
6.3.2 Installation optionsFor a level control application the sensor is installed in a static position�
► Install the 3D Smart Sensor on the cover of the silo so that it faces towards the floor of the silo�
► Enter the installation position values in the ifm Vision Assistant operating software�
6.3.3 ParameterisationFrame rate
► Set the frame rate to 50 Hz�
> When the recommended 50 Hz mode and a rotated installation is used, the temperature range of the system is restricted to -40 °C / +70 °C� The system has an integrated temperature monitoring capability, and in the event of an ambient temperature higher than the operating range it switches into pure communications mode�
ROI (Region of Interest) ► Since the fill level changes differently depending on the flow properties of the material from the centre to the outside, several ROIs are set up; these monitor separately the region along the silo axis�
► One ROI is used along the silo axis�
► The ROIs in the outer regions are assigned to a single ROI group�
ROI1 ROI1
ROI Group 2
min
ROI2
ROI5
ROI6
ROI7
ROI8
ROI9
ROI4
ROI3
ROI8 ROI4
ROI
Group 2
ROI
Group 2
ROI
Group 1
Fill level monitoring with a central ROI1 (ROI group 1) and a ROI group 2 consisting of ROI2 to ROI9 arranged in a circle

3D Smart Sensor Basic Function
22
Averaging over time ► Depending on the response time of the system, choose the type of averaging over time:
– short averaging (≤3 frames) generates more noise, slack adherence to the threshold value, quick responses and more false detections;
– long averaging (≥3 frames) generates less noise, close adherence to the threshold value, slow responses and fewer false detections�
The pixel status can be improved with intelligent averaging� Intelligent averaging should be used unless there is a compelling reason to the contrary (→ Operating Instructions).
Excessive load on the CAN bus can lead to a reduction in the setting of the CAN output cycle Modulo (→ Operating Instructions).
6.3.4 Relevant outputThe CAN messages with the value of the results (e�g� min z) are received by the active controller which compares them with the saved threshold value (target value + (at minimum setting) or - (at maximum setting) tolerance)� Based on this a reaction (such as performing an automatic refill or outputting a warning signal) can be initiated (→ "8 Interface")�
6.3.5 Operating characteristic / performance ● The detection performance depends on the distance, size and reflectivity of an object�
● Boundaries of the monitoring region (min� range/monitoring region): min� 0�5 m�
● Measurement accuracy: typically 5 to 10 cm in the immediate vicinity (<5 m)�

23
3D Smart Sensor Basic Function
UK
7 ParametersThe parameters can be changed and adjusted in function of the use of the 3D Smart Sensor�
Details on the setting and parameterisation of the unit can be found in the ifm Vision Assistant Software manual�

3D Smart Sensor Basic Function
24
Example
only
8 InterfaceThe output of the preprocessed function data occurs via CAN-Bus, either with the protocol CANopen or the protocol SAE J 1939�
The description of the CANopen and J1939 signals relevant to your firmware version can be found in the respective files:
● *�eds for CANopen
● *�dbc for J1939
These files can be downloaded as a package together with the firmware from the ifm homepage� The following tables should be taken as examples only� They describe the firmware version DI2�2�6�
8.1 CANopen
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1000 DeviceType 0x7 ro 0
Fixed to "0" (Zero) until there is an adequate CANopen profile available
1001 Error Register 0x7 ro
1003 Predefined Error Field 0x8
Index 0: Number of Errors is defined according to the size of the error memory in the diagnosis�
1003 0 Number of Errors 0x7 rw 0 1 4
1003 1 Standard Error Field 0x7 ro 0 1 4
1003 2 Standard Error Field_2 0x7 ro 0 1 4
1003 3 Standard Error Field_3 0x7 ro 0 1 4
1003 4 Standard Error Field_4 0x7 ro 0 1 4
1003 5 Standard Error Field_5 0x7 ro 0 1 4
1003 6 Standard Error Field_6 0x7 ro 0 1 4
1003 7 Standard Error Field_7 0x7 ro 0 1 4
1003 8 Standard Error Field_8 0x7 ro 0 1 4
1003 9 Standard Error Field_9 0x7 ro 0 1 4
1003 A Standard Error Field_a 0x7 ro 0 1 4
1003 B Standard Error Field_b 0x7 ro 0 1 4
1003 C Standard Error Field_c 0x7 ro 0 1 4
1003 D Standard Error Field_d 0x7 ro 0 1 4
1003 E Standard Error Field_e 0x7 ro 0 1 4

25
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1003 F Standard Error Field_f 0x7 ro 0 1 4
Index 0: Number of Errors is defined according to the size of the error memory in the diagnosis�
1003 10 Standard Error Field_10 0x7 ro 0 1 4
1003 11 Standard Error Field_11 0x7 ro 0 1 4
1003 12 Standard Error Field_12 0x7 ro 0 1 4
1003 13 Standard Error Field_13 0x7 ro 0 1 4
1005 COB ID SYNC 0x7 rw 0x00000080 0x00000080 –
1006 Communication Cycle Period 0x7 rw 0x00000000 –
1008 Manufacturer Device Name 0x7 const O3D150
(No Index) should be filled at runtime with the article number of the camera�Device is Sensor: O3M150Device is Smart-Sensor: O3M151 (Distance Image with Basic Function output)
1009Manufacturer Hardware Version
0x7 const
(No Index) should be filled at runtime with the HW Version of the camera
100AManufacturer Software Version
0x7 const
(No Index) should be filled at runtime with the Software version number and variant of the camera <Major> <Minor> <Patchlevel> <Variant>
1010Store Parameter Field
0x8Index 01: Save all Parameters� This is the list of parameters to be stored to Flash memory:- TBD
1010 0 Number of entries 0x7 ro 1 1 4
1010 1 Save all Parameters 0x7 rw 1 1 4
1011 Restore Default Parameters 0x8
–1011 0 Number of entries 0x7 ro 1 1 4
1011 1 Restore all Default Parameters 0x7 rw 1 1 4
1014 COB ID EMCY 0x7 ro$NODEID+0x80
0x00000080 0x00000100 –
1016 Consumer Heartbeat Time 0x8
–1016 0 Number of entries 0x7 ro 1 1 4
1016 1 Consumer Heartbeat Time 0x7 rw 0 1 4

3D Smart Sensor Basic Function
26
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1017 Producer Heartbeat Time 0x7 rw 0 –
1018 Identity Object 0x9 Index 01: Vendor ID is 0x0069666D, this is the fixed ID for ifm electronicIndex 02: Product Code :O3M150: 0x0020 0010O3M151: 0x0020 0011Index 03: Revision Number: should be filled at runtime with 0x00 <Major number> <Minor number> <Patch Level> of the SW Version�Index 04: Serial number: should be filled at runtime with the serial number of the camera
1018 0 Number of entries 0x7 ro 4 1 4
1018 1 Vendor Id 0x7 ro 0x0069666D 1 4
1018 2 Product Code 0x7 ro 0 1 4
1018 3 Revision number 0x7 ro 0 1 4
1018 4 Serial number 0x7 ro 0 1 4
1800
Transmit PDO Communication Parameter x_output 0
0x9
Index 02 Transmission Type: 254 (manufacturer defined): The mobile camera is typically running with internally defined time/frequency�Thus it will send out the data (TPDOs) as available, typically with cycle time of 20ms, 30ms, 40ms or multiple time: two or three times the cycle time�Predefinition of the TPDOs is in such a way, that all available data for the Distance Image variant will be sent out from the start�
1800 0 Number of entries 0x7 ro 3 0x03 0x03
1800 1 COB ID 0x7 rw $NODEID +0x40000180 0x00000080 0xFFFFFFFF
1800 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1800 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1801
Transmit PDO Communication Parameter y_output 0
0x9
1801 0 Number of entries 0x7 ro 3 0x03 0x03
1801 1 COB ID 0x7 rw $NODEID +0x40000280 0x00000080 0xFFFFFFFF
1801 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1801 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1802
Transmit PDO Communication Parameter z_output 0
0x9
–1802 0 Number of entries 0x7 ro 3 0x03 0x03
1802 1 COB ID 0x7 rw $NODEID +0x40000380 0x00000080 0xFFFFFFFF
1802 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1802 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

27
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1803
Transmit PDO Communication Parameter ampl_output 0
0x9–
1803 0 Number of entries 0x7 ro 3 0x03 0x03
1803 1 COB ID 0x7 rw $NODEID +0x40000480 0x00000080 0xFFFFFFFF
–1803 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1803 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1804
Transmit PDO Communication Parameter x_output 1
0x9
–1804 0 Number of entries 0x7 ro 3 0x03 0x03
1804 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
1804 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1804 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1805
Transmit PDO Communication Parameter y_output 1
0x9
–1805 0 Number of entries 0x7 ro 3 0x03 0x03
1805 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
1805 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1805 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1806
Transmit PDO Communication Parameter z_output 1
0x9
–1806 0 Number of entries 0x7 ro 3 0x03 0x03
1806 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
1806 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1806 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1807
Transmit PDO Communication Parameter ampl_output 1
0x9
–1807 0 Number of entries 0x7 ro 3 0x03 0x03
1807 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
1807 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1807 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

3D Smart Sensor Basic Function
28
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1808
Transmit PDO Communication Parameter x_output 2
0x9
–1808 0 Number of entries 0x7 ro 3 0x03 0x03
1808 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
1808 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1808 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1809
Transmit PDO Communication Parameter y_output 2
0x9–
1809 0 Number of entries 0x7 ro 3 0x03 0x03
1809 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
–1809 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1809 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
180A
Transmit PDO Communication Parameter z_output 2
0x9
–180A 0 Number of entries 0x7 ro 3 0x03 0x03
180A 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
180A 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
180A 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
180B
Transmit PDO Communication Parameter ampl_output 2
0x9
–180B 0 Number of entries 0x7 ro 3 0x03 0x03
180B 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
180B 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
180B 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
180C
Transmit PDO Communication Parameter x_output 3
0x9
–180C 0 Number of entries 0x7 ro 3 0x03 0x03
180C 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
180C 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
180C 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

29
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
180D
Transmit PDO Communication Parameter y_output 3
0x9
–180D 0 Number of entries 0x7 ro 3 0x03 0x03
180D 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
180D 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
180D 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
180E
Transmit PDO Communication Parameter z_output 3
0x9
–180E 0 Number of entries 0x7 ro 3 0x03 0x03
180E 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
180E 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
180E 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
180F
Transmit PDO Communication Parameter ampl_output 3
0x9–
180F 0 Number of entries 0x7 ro 3 0x03 0x03
180F 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
–180F 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
180F 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1810
Transmit PDO Communication Parameter x_output 4
0x9
–1810 0 Number of entries 0x7 ro 3 0x03 0x03
1810 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
1810 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1810 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1811
Transmit PDO Communication Parameter y_output 4
0x9
–1811 0 Number of entries 0x7 ro 3 0x03 0x03
1811 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1811 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1811 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

3D Smart Sensor Basic Function
30
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1812
Transmit PDO Communication Parameter z_output 4
0x9
–1812 0 Number of entries 0x7 ro 3 0x03 0x03
1812 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1812 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1812 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1813
Transmit PDO Communication Parameter ampl_output 4
0x9
–1813 0 Number of entries 0x7 ro 3 0x03 0x03
1813 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1813 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1813 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1814
Transmit PDO Communication Parameter x_output 5
0x9
–1814 0 Number of entries 0x7 ro 3 0x03 0x03
1814 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1814 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1814 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1815
Transmit PDO Communication Parameter y_output 5
0x9 –
1815 0 Number of entries 0x7 ro 3 0x03 0x03
–1815 1 COB ID 0x7 rw
$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1815 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1815 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1816
Transmit PDO Communication Parameter z_output 5
0x9
–1816 0 Number of entries 0x7 ro 3 0x03 0x03
1816 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1816 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1816 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

31
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1817
Transmit PDO Communication Parameter ampl_output 5
0x9
–1817 0 Number of entries 0x7 ro 3 0x03 0x03
1817 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1817 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1817 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1818
Transmit PDO Communication Parameter x_output 6
0x9
–1818 0 Number of entries 0x7 ro 3 0x03 0x03
1818 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1818 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1818 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1819
Transmit PDO Communication Parameter y_output 6
0x9
–1819 0 Number of entries 0x7 ro 3 0x03 0x03
1819 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1819 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1819 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
181A
Transmit PDO Communication Parameter z_output 6
0x9
–181A 0 Number of entries 0x7 ro 3 0x03 0x03
181A 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
181A 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
181A 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
181B
Transmit PDO Communication Parameter ampl_output 6
0x9
–181B 0 Number of entries 0x7 ro 3 0x03 0x03
181B 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
181B 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
181B 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

3D Smart Sensor Basic Function
32
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
181C
Transmit PDO Communication Parameter x_output 7
0x9
–181C 0 Number of entries 0x7 ro 3 0x03 0x03
181C 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
181C 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
181C 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
181D
Transmit PDO Communication Parameter y_output 7
0x9
–181D 0 Number of entries 0x7 ro 3 0x03 0x03
181D 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
181D 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
181D 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
181E
Transmit PDO Communication Parameter z_output 7
0x9
–181E 0 Number of entries 0x7 ro 3 0x03 0x03
181E 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
181E 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
181E 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
181F
Transmit PDO Communication Parameter ampl_output 7
0x9
–181F 0 Number of entries 0x7 ro 3 0x03 0x03
181F 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
181F 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
181F 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1820
Transmit PDO Communication Parameter x_output 8
0x9
–1820 0 Number of entries 0x7 ro 3 0x03 0x03
1820 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1820 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1820 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF –

33
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1821
Transmit PDO Communication Parameter y_output 8
0x9
–1821 0 Number of entries 0x7 ro 3 0x03 0x03
1821 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1821 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1821 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1822
Transmit PDO Communication Parameter z_output 8
0x9
–1822 0 Number of entries 0x7 ro 3 0x03 0x03
1822 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1822 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1822 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1823
Transmit PDO Communication Parameter ampl_output 8
0x9
–1823 0 Number of entries 0x7 ro 3 0x03 0x03
1823 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1823 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1823 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1824
Transmit PDO Communication Parameter x_output 9
0x9
–1824 0 Number of entries 0x7 ro 3 0x03 0x03
1824 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1824 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1824 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1825
Transmit PDO Communication Parameter y_output 9
0x9
–1825 0 Number of entries 0x7 ro 3 0x03 0x03
1825 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1825 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1825 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

3D Smart Sensor Basic Function
34
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1826
Transmit PDO Communication Parameter z_output 9
0x9
–1826 0 Number of entries 0x7 ro 3 0x03 0x03
1826 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1826 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
–1826 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1827
Transmit PDO Communication Parameter ampl_output 9
0x9
–1827 0 Number of entries 0x7 ro 3 0x03 0x03
1827 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1827 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1827 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1828
Transmit PDO Communication Parameter x_output 10
0x9
–1828 0 Number of entries 0x7 ro 3 0x03 0x03
1828 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1828 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1828 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1829
Transmit PDO Communication Parameter y_output 10
0x9
–1829 0 Number of entries 0x7 ro 3 0x03 0x03
1829 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1829 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1829 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
182A
Transmit PDO Communication Parameter z_output 10
0x9
–182A 0 Number of entries 0x7 ro 3 0x03 0x03
182A 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
182A 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
182A 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

35
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
182B
Transmit PDO Communication Parameter ampl_output 10
0x9
–182B 0 Number of entries 0x7 ro 3 0x03 0x03
182B 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
182B 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
182B 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
182C
Transmit PDO Communication Parameter x_output 11
0x9–
182C 0 Number of entries 0x7 ro 3 0x03 0x03
182C 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
–182C 2 Transmission
Type 0x7 rw 254 0x00000080 0xFFFFFFFF
182C 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
182D
Transmit PDO Communication Parameter y_output 11
0x9
–182D 0 Number of entries 0x7 ro 3 0x03 0x03
182D 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
182D 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
182D 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
182E
Transmit PDO Communication Parameter z_output 11
0x9
–182E 0 Number of entries 0x7 ro 3 0x03 0x03
182E 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
182E 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
182E 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
182F
Transmit PDO Communication Parameter ampl_output 11
0x9
–182F 0 Number of entries 0x7 ro 3 0x03 0x03
182F 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
182F 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
182F 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

3D Smart Sensor Basic Function
36
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1830
Transmit PDO Communication Parameter x_output 12
0x9
–1830 0 Number of entries 0x7 ro 3 0x03 0x03
1830 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1830 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1830 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1831
Transmit PDO Communication Parameter y_output 12
0x9
–1831 0 Number of entries 0x7 ro 3 0x03 0x03
1831 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1831 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1831 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1832
Transmit PDO Communication Parameter z_output 12
0x9 –
1832 0 Number of entries 0x7 ro 3 0x03 0x03
–1832 1 COB ID 0x7 rw
$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1832 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1832 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1833
Transmit PDO Communication Parameter ampl_output 12
0x9
–1833 0 Number of entries 0x7 ro 3 0x03 0x03
1833 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1833 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1833 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1834
Transmit PDO Communication Parameter x_output 13
0x9
–1834 0 Number of entries 0x7 ro 3 0x03 0x03
1834 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1834 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1834 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

37
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1835
Transmit PDO Communication Parameter y_output 13
0x9
–1835 0 Number of entries 0x7 ro 3 0x03 0x03
1835 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1835 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1835 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1836
Transmit PDO Communication Parameter z_output 13
0x9
–1836 0 Number of entries 0x7 ro 3 0x03 0x03
1836 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1836 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1836 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1837
Transmit PDO Communication Parameter ampl_output 13
0x9
–1837 0 Number of entries 0x7 ro 3 0x03 0x03
1837 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1837 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1837 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1838
Transmit PDO Communication Parameter x_output 14
0x9–
1838 0 Number of entries 0x7 ro 3 0x03 0x03
1838 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
–1838 2 Transmission
Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1838 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1839
Transmit PDO Communication Parameter y_output 14
0x9
–1839 0 Number of entries 0x7 ro 3 0x03 0x03
1839 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
1839 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1839 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

3D Smart Sensor Basic Function
38
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
183A
Transmit PDO Communication Parameter z_output 14
0x9
–183A 0 Number of entries 0x7 ro 3 0x03 0x03
183A 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
183A 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
183A 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
183B
Transmit PDO Communication Parameter ampl_output 14
0x9
–183B 0 Number of entries 0x7 ro 3 0x03 0x03
183B 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
183B 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
183B 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
183C
Transmit PDO Communication Parameter x_output 15
0x9
–183C 0 Number of entries 0x7 ro 3 0x03 0x03
183C 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
183C 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
183C 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
183D
Transmit PDO Communication Parameter y_output 15
0x9
–183D 0 Number of entries 0x7 ro 3 0x03 0x03
183D 1 COB ID 0x7 rw$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
183D 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
183D 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
183E
Transmit PDO Communication Parameter z_output 15
0x9 –
183E 0 Number of entries 0x7 ro 3 0x03 0x03
–183E 1 COB ID 0x7 rw
$NODEID+0xC0000000
0x00000080 0xFFFFFFFF
183E 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
183E 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF

39
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
183F
Transmit PDO Communication Parameter ampl_output 15
0x9
–183F 0 Number of entries 0x7 ro 3 0x03 0x03
183F 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
183F 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
183F 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1840
Transmit PDO Communication Parameter - Global_Information
0x9
–1840 0 Number of entries 0x7 ro 3 0x02 0x06
1840 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
1840 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1840 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1841
Transmit PDO Communication Parameter - SyncMsg
0x9
–1841 0 Number of entries 0x7 ro 3 0x02 0x06
1841 1 COB ID 0x7 rw 0x80000000 0x00000080 0xFFFFFFFF
1841 2 Transmission Type 0x7 rw 0x80000000 0x00000080 0xFFFFFFFF
1841 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1842
Transmit PDO Communication Parameter - BF Global Parameters
0x9
–1842 0 Number of entries 0x7 ro 3 0x02 0x06
1842 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
1842 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1842 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1843
Transmit PDO Communication Parameter - ROI Definition
0x9
–1843 0 Number of entries 0x7 ro 3 0x02 0x06
1843 1 COB ID 0x7 rw $NODEID +0xC0000000 0x00000080 0xFFFFFFFF
1843 2 Transmission Type 0x7 rw 254 0x00000080 0xFFFFFFFF
1843 3 Inhibit Time 0x7 rw 0x0000 0x00000080 0xFFFFFFFF
1A00
Transmit PDO Mapping Parameter x_output 0
0x9 –

3D Smart Sensor Basic Function
40
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1A00 0 Number of entries 0x7 rw 1 0 1–
1A00 1 PDO Mapping Entry 0x7 rw 0x21000140 0 1
1A01
Transmit PDO Mapping Parameter y_output 0
0x9
–1A01 0 Number of entries 0x7 rw 1 0 1
1A01 1 PDO Mapping Entry 0x7 rw 0x21010140 0 1
1A02
Transmit PDO Mapping Parameter z_output 0
0x9
–1A02 0 Number of entries 0x7 rw 1 0 1
1A02 1 PDO Mapping Entry 0x7 rw 0x21020140 0 1
1A03
Transmit PDO Mapping Parameter ampl_output 0
0x9
–1A03 0 Number of entries 0x7 rw 1 0 1
1A03 1 PDO Mapping Entry 0x7 rw 0x21030140 0 1
1A04
Transmit PDO Mapping Parameter x_output 1
0x9
–1A04 0 Number of entries 0x7 rw 1 0 1
1A04 1 PDO Mapping Entry 0x7 rw 0x21040140 0 1
1A05
Transmit PDO Mapping Parameter y_output 1
0x9
–1A05 0 Number of entries 0x7 rw 1 0 1
1A05 1 PDO Mapping Entry 0x7 rw 0x21050140 0 1
1A06
Transmit PDO Mapping Parameter z_output 1
0x9
–1A06 0 Number of entries 0x7 rw 1 0 1
1A06 1 PDO Mapping Entry 0x7 rw 0x21060140 0 1
1A07
Transmit PDO Mapping Parameter ampl_output 1
0x9
–1A07 0 Number of entries 0x7 rw 1 0 1
1A07 1 PDO Mapping Entry 0x7 rw 0x21070140 0 1

41
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1A08
Transmit PDO Mapping Parameter x_output 2
0x9
–1A08 0 Number of entries 0x7 rw 1 0 1
1A08 1 PDO Mapping Entry 0x7 rw 0x21080140 0 1
1A09
Transmit PDO Mapping Parameter y_output 2
0x9 –
1A09 0 Number of entries 0x7 rw 1 0 1–
1A09 1 PDO Mapping Entry 0x7 rw 0x21090140 0 1
1A0A
Transmit PDO Mapping Parameter z_output 2
0x9
–1A0A 0 Number of entries 0x7 rw 1 0 1
1A0A 1 PDO Mapping Entry 0x7 rw 0x210A0140 0 1
1A0B
Transmit PDO Mapping Parameter ampl_output 2
0x9
–1A0B 0 Number of entries 0x7 rw 1 0 1
1A0B 1 PDO Mapping Entry 0x7 rw 0x210B0140 0 1
1A0C
Transmit PDO Mapping Parameter x_output 3
0x9
–1A0C 0 Number of entries 0x7 rw 1 0 1
1A0C 1 PDO Mapping Entry 0x7 rw 0x210C0140 0 1
1A0D
Transmit PDO Mapping Parameter y_output 3
0x9
–1A0D 0 Number of entries 0x7 rw 1 0 1
1A0D 1 PDO Mapping Entry 0x7 rw 0x210D0140 0 1
1A0E
Transmit PDO Mapping Parameter z_output 3
0x9
–1A0E 0 Number of entries 0x7 rw 1 0 1
1A0E 1 PDO Mapping Entry 0x7 rw 0x210E0140 0 1
1A0F
Transmit PDO Mapping Parameter ampl_output 3
0x9
–1A0F 0 Number of entries 0x7 rw 1 0 1
1A0F 1 PDO Mapping Entry 0x7 rw 0x210F0140 0 1

3D Smart Sensor Basic Function
42
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1A10
Transmit PDO Mapping Parameter x_output 4
0x9
–1A10 0 Number of entries 0x7 rw 1 0 1
1A10 1 PDO Mapping Entry 0x7 rw 0x21100140 0 1
1A11
Transmit PDO Mapping Parameter y_output 4
0x9
–1A11 0 Number of entries 0x7 rw 1 0 1
1A11 1 PDO Mapping Entry 0x7 rw 0x21110140 0 1
1A12
Transmit PDO Mapping Parameter z_output 4
0x9 –
1A12 0 Number of entries 0x7 rw 1 0 1–
1A12 1 PDO Mapping Entry 0x7 rw 0x21120140 0 1
1A13
Transmit PDO Mapping Parameter ampl_output 4
0x9
–1A13 0 Number of entries 0x7 rw 1 0 1
1A13 1 PDO Mapping Entry 0x7 rw 0x21130140 0 1
1A14
Transmit PDO Mapping Parameter x_output 5
0x9
–1A14 0 Number of entries 0x7 rw 1 0 1
1A14 1 PDO Mapping Entry 0x7 rw 0x21140140 0 1
1A15
Transmit PDO Mapping Parameter y_output 5
0x9
–1A15 0 Number of entries 0x7 rw 1 0 1
1A15 1 PDO Mapping Entry 0x7 rw 0x21150140 0 1
1A16
Transmit PDO Mapping Parameter z_output 5
0x9
–1A16 0 Number of entries 0x7 rw 1 0 1
1A16 1 PDO Mapping Entry 0x7 rw 0x21160140 0 1
1A17
Transmit PDO Mapping Parameter ampl_output 5
0x9
–1A17 0 Number of entries 0x7 rw 1 0 1
1A17 1 PDO Mapping Entry 0x7 rw 0x21170140 0 1

43
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1A18
Transmit PDO Mapping Parameter x_output 6
0x9
–1A18 0 Number of entries 0x7 rw 1 0 1
1A18 1 PDO Mapping Entry 0x7 rw 0x21180140 0 1
1A19
Transmit PDO Mapping Parameter y_output 6
0x9
–1A19 0 Number of entries 0x7 rw 1 0 1
1A19 1 PDO Mapping Entry 0x7 rw 0x21190140 0 1
1A1A
Transmit PDO Mapping Parameter z_output 6
0x9
–1A1A 0 Number of entries 0x7 rw 1 0 1
1A1A 1 PDO Mapping Entry 0x7 rw 0x211A0140 0 1
1A1B
Transmit PDO Mapping Parameter ampl_output 6
0x9
–1A1B 0 Number of entries 0x7 rw 1 0 1
1A1B 1 PDO Mapping Entry 0x7 rw 0x211B0140 0 1
1A1C
Transmit PDO Mapping Parameter x_output 7
0x9
–1A1C 0 Number of entries 0x7 rw 1 0 1
1A1C 1 PDO Mapping Entry 0x7 rw 0x211C0140 0 1
1A1D
Transmit PDO Mapping Parameter y_output 7
0x9
–1A1D 0 Number of entries 0x7 rw 1 0 1
1A1D 1 PDO Mapping Entry 0x7 rw 0x211D0140 0 1
1A1E
Transmit PDO Mapping Parameter z_output 7
0x9
–1A1E 0 Number of entries 0x7 rw 1 0 1
1A1E 1 PDO Mapping Entry 0x7 rw 0x211E0140 0 1
1A1F
Transmit PDO Mapping Parameter ampl_output 7
0x9
–1A1F 0 Number of entries 0x7 rw 1 0 1
1A1F 1 PDO Mapping Entry 0x7 rw 0x211F0140 0 1

3D Smart Sensor Basic Function
44
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1A20
Transmit PDO Mapping Parameter x_output 8
0x9
–1A20 0 Number of entries 0x7 rw 1 0 1
1A20 1 PDO Mapping Entry 0x7 rw 0x21200140 0 1
1A21
Transmit PDO Mapping Parameter y_output 8
0x9
–1A21 0 Number of entries 0x7 rw 1 0 1
1A21 1 PDO Mapping Entry 0x7 rw 0x21210140 0 1
1A22
Transmit PDO Mapping Parameter z_output 8
0x9
–1A22 0 Number of entries 0x7 rw 1 0 1
1A22 1 PDO Mapping Entry 0x7 rw 0x21220140 0 1
1A23
Transmit PDO Mapping Parameter ampl_output 8
0x9–
1A23 0 Number of entries 0x7 rw 1 0 1
1A23 1 PDO Mapping Entry 0x7 rw 0x21230140 0 1 –
1A24
Transmit PDO Mapping Parameter x_output 9
0x9
–1A24 0 Number of entries 0x7 rw 1 0 1
1A24 1 PDO Mapping Entry 0x7 rw 0x21240140 0 1
1A25
Transmit PDO Mapping Parameter y_output 9
0x9
–1A25 0 Number of entries 0x7 rw 1 0 1
1A25 1 PDO Mapping Entry 0x7 rw 0x21250140 0 1
1A26
Transmit PDO Mapping Parameter z_output 9
0x9
–1A26 0 Number of entries 0x7 rw 1 0 1
1A26 1 PDO Mapping Entry 0x7 rw 0x21260140 0 1
1A27
Transmit PDO Mapping Parameter ampl_output 9
0x9
–1A27 0 Number of entries 0x7 rw 1 0 1
1A27 1 PDO Mapping Entry 0x7 rw 0x21270140 0 1

45
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1A28
Transmit PDO Mapping Parameter x_output 10
0x9
–1A28 0 Number of entries 0x7 rw 1 0 1
1A28 1 PDO Mapping Entry 0x7 rw 0x21280140 0 1
1A29
Transmit PDO Mapping Parameter y_output 10
0x9
–1A29 0 Number of entries 0x7 rw 1 0 1
1A29 1 PDO Mapping Entry 0x7 rw 0x21290140 0 1
1A2A
Transmit PDO Mapping Parameter z_output 10
0x9
–1A2A 0 Number of entries 0x7 rw 1 0 1
1A2A 1 PDO Mapping Entry 0x7 rw 0x212A0140 0 1
1A2B
Transmit PDO Mapping Parameter ampl_output 10
0x9
–1A2B 0 Number of entries 0x7 rw 1 0 1
1A2B 1 PDO Mapping Entry 0x7 rw 0x212B0140 0 1
1A2C
Transmit PDO Mapping Parameter x_output 11
0x9
–1A2C 0 Number of entries 0x7 rw 1 0 1
1A2C 1 PDO Mapping Entry 0x7 rw 0x212C0140 0 1
1A2D
Transmit PDO Mapping Parameter y_output 11
0x9
–1A2D 0 Number of entries 0x7 rw 1 0 1
1A2D 1 PDO Mapping Entry 0x7 rw 0x212D0140 0 1
1A2E
Transmit PDO Mapping Parameter z_output 11
0x9
–1A2E 0 Number of entries 0x7 rw 1 0 1
1A2E 1 PDO Mapping Entry 0x7 rw 0x212E0140 0 1
1A2F
Transmit PDO Mapping Parameter ampl_output 11
0x9
–1A2F 0 Number of entries 0x7 rw 1 0 1
1A2F 1 PDO Mapping Entry 0x7 rw 0x212F0140 0 1

3D Smart Sensor Basic Function
46
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1A30
Transmit PDO Mapping Parameter x_output 12
0x9
–1A30 0 Number of entries 0x7 rw 1 0 1
1A30 1 PDO Mapping Entry 0x7 rw 0x21300140 0 1
1A31
Transmit PDO Mapping Parameter y_output 12
0x9
–1A31 0 Number of entries 0x7 rw 1 0 1
1A31 1 PDO Mapping Entry 0x7 rw 0x21310140 0 1
1A32
Transmit PDO Mapping Parameter z_output 12
0x9
–1A32 0 Number of entries 0x7 rw 1 0 1
1A32 1 PDO Mapping Entry 0x7 rw 0x21320140 0 1
1A33
Transmit PDO Mapping Parameter ampl_output 12
0x9
–1A33 0 Number of entries 0x7 rw 1 0 1
1A33 1 PDO Mapping Entry 0x7 rw 0x21330140 0 1
1A34
Transmit PDO Mapping Parameter x_output 13
0x9
–1A34 0 Number of entries 0x7 rw 1 0 1
1A34 1 PDO Mapping Entry 0x7 rw 0x21340140 0 1
1A35
Transmit PDO Mapping Parameter y_output 13
0x9
–1A35 0 Number of entries 0x7 rw 1 0 1
1A35 1 PDO Mapping Entry 0x7 rw 0x21350140 0 1
1A36
Transmit PDO Mapping Parameter z_output 13
0x9
–1A36 0 Number of entries 0x7 rw 1 0 1
1A36 1 PDO Mapping Entry 0x7 rw 0x21360140 0 1
1A37
Transmit PDO Mapping Parameter ampl_output 13
0x9
–1A37 0 Number of entries 0x7 rw 1 0 1
1A37 1 PDO Mapping Entry 0x7 rw 0x21370140 0 1

47
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1A38
Transmit PDO Mapping Parameter x_output 14
0x9
–1A38 0 Number of entries 0x7 rw 1 0 1
1A38 1 PDO Mapping Entry 0x7 rw 0x21380140 0 1
1A39
Transmit PDO Mapping Parameter y_output 14
0x9
–1A39 0 Number of entries 0x7 rw 1 0 1
1A39 1 PDO Mapping Entry 0x7 rw 0x21390140 0 1
1A3A
Transmit PDO Mapping Parameter z_output 14
0x9
–1A3A 0 Number of entries 0x7 rw 1 0 1
1A3A 1 PDO Mapping Entry 0x7 rw 0x213A0140 0 1
1A3B
Transmit PDO Mapping Parameter ampl_output 14
0x9
–1A3B 0 Number of entries 0x7 rw 1 0 1
1A3B 1 PDO Mapping Entry 0x7 rw 0x213B0140 0 1
1A3C
Transmit PDO Mapping Parameter x_output 15
0x9
–1A3C 0 Number of entries 0x7 rw 1 0 1
1A3C 1 PDO Mapping Entry 0x7 rw 0x213C0140 0 1
1A3D
Transmit PDO Mapping Parameter y_output 15
0x9
–1A3D 0 Number of entries 0x7 rw 1 0 1
1A3D 1 PDO Mapping Entry 0x7 rw 0x213D0140 0 1
1A3E
Transmit PDO Mapping Parameter z_output 15
0x9
–1A3E 0 Number of entries 0x7 rw 1 0 1
1A3E 1 PDO Mapping Entry 0x7 rw 0x213E0140 0 1
1A3F
Transmit PDO Mapping Parameter ampl_output 15
0x9
–1A3F 0 Number of entries 0x7 rw 1 0 1
1A3F 1 PDO Mapping Entry 0x7 rw 0x213F0140 0 1

3D Smart Sensor Basic Function
48
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1A40
Transmit PDO Mapping Parameter - Global_Information
0x9
–
1A40 0 Number of entries 0x7 rw 4 0 8
1A40 1PDO Mapping Entry - GLOB_master_time
0x7 rw 0x22010120 0 8
1A40 2PDO Mapping Entry - GLOB_Sensor_Available
0x7 rw 0x22010208 0 8
1A40 3PDO Mapping Entry - SwCtrl_OpMode
0x7 rw 0x22010308 0 8
1A40 4PDO Mapping Entry - Global_Information_cnt
0x7 rw 0x22010408 0 8
1A41
Transmit PDO Mapping Parameter - SyncMsg
0x9
–1A41 0 Number of entries 0x7 rw 1 0 8
1A41 1
PDO Mapping Entry - KP_MasterTime_LastTxTimeStamp
0x7 rw 0x22010308 0 8
1A42
Transmit PDO Mapping Parameter - BF Global Parameters
0x9–
1A42 0 Number of entries 0x7 rw 4 0 8
1A42 1PDO Mapping Entry - Number of groups
0x7 rw 0x22020108 0 8
–
1A42 2PDO Mapping Entry - Number of ROIs
0x7 rw 0x22020208 0 8
1A42 3PDO Mapping Entry - OutputMode
0x7 rw 0x22020308 0 8
1A42 4
PDO Mapping Entry - BF_Global_Parameters_cnt
0x7 rw 0x22020408 0 8

49
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
1A43
Transmit PDO Mapping Parameter - ROI Definition
0x9
–
1A43 0 Number of entries 0x7 rw 8 0 8
1A43 1 PDO Mapping Entry - ROI_cnt 0x7 rw 0x22030108 0 8
1A43 2 PDO Mapping Entry - ROI_group 0x7 rw 0x22030208 0 8
1A43 3PDO Mapping Entry - ROI_lower_right_x
0x7 rw 0x22030308 0 8
1A43 4PDO Mapping Entry - ROI_lower_right_y
0x7 rw 0x22030408 0 8
1A43 5PDO Mapping Entry - ROI_number
0x7 rw 0x22030508 0 8
1A43 6PDO Mapping Entry - ROI_value_type
0x7 rw 0x22030608 0 8
1A43 7PDO Mapping Entry - ROI_upper_left_x
0x7 rw 0x22030708 0 8
1A43 8PDO Mapping Entry - ROI_upper_left_y
0x7 rw 0x22030808 0 8
2100 x_output 0 0x9
–2100 0 NrOfObjects 0x7 ro 1 0 8
2100 1 x_output 0 0x7 ro 1 0 8
2101 y_output 0 0x9
–2101 0 NrOfObjects 0x7 ro 1 0 8
2101 1 y_output 0 0x7 ro 1 0 8
2102 z_output 0 0x9
–2102 0 NrOfObjects 0x7 ro 1 0 8
2102 1 z_output 0 0x7 ro 1 0 8
2103 ampl_output 0 0x9
–2103 0 NrOfObjects 0x7 ro 1 0 8
2103 1 ampl_output 0 0x7 ro 1 0 8
2104 x_output 1 0x9–
2104 0 NrOfObjects 0x7 ro 1 0 8
2104 1 x_output 1 0x7 ro 1 0 8 –
2105 y_output 1 0x9
–2105 0 NrOfObjects 0x7 ro 1 0 8
2105 1 y_output 1 0x7 ro 1 0 8
2106 z_output 1 0x9
–2106 0 NrOfObjects 0x7 ro 1 0 8
2106 1 z_output 1 0x7 ro 1 0 8
2107 ampl_output 1 0x9
–2107 0 NrOfObjects 0x7 ro 1 0 8
2107 1 ampl_output 1 0x7 ro 1 0 8

3D Smart Sensor Basic Function
50
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
2108 x_output 2 0x9
–2108 0 NrOfObjects 0x7 ro 1 0 8
2108 1 x_output 2 0x7 ro 1 0 8
2109 y_output 2 0x9
–2109 0 NrOfObjects 0x7 ro 1 0 8
2109 1 y_output 2 0x7 ro 1 0 8
210A z_output 2 0x9
–210A 0 NrOfObjects 0x7 ro 1 0 8
210A 1 z_output 2 0x7 ro 1 0 8
210B ampl_output 2 0x9
–210B 0 NrOfObjects 0x7 ro 1 0 8
210B 1 ampl_output 2 0x7 ro 1 0 8
210C x_output 3 0x9
–210C 0 NrOfObjects 0x7 ro 1 0 8
210C 1 x_output 3 0x7 ro 1 0 8
210D y_output 3 0x9
–210D 0 NrOfObjects 0x7 ro 1 0 8
210D 1 y_output 3 0x7 ro 1 0 8
210E z_output 3 0x9
–210E 0 NrOfObjects 0x7 ro 1 0 8
210E 1 z_output 3 0x7 ro 1 0 8
210F ampl_output 3 0x9
–210F 0 NrOfObjects 0x7 ro 1 0 8
210F 1 ampl_output 3 0x7 ro 1 0 8
2110 x_output 4 0x9
–2110 0 NrOfObjects 0x7 ro 1 0 8
2110 1 x_output 4 0x7 ro 1 0 8
2111 y_output 4 0x9
–2111 0 NrOfObjects 0x7 ro 1 0 8
2111 1 y_output 4 0x7 ro 1 0 8
2112 z_output 4 0x9
–2112 0 NrOfObjects 0x7 ro 1 0 8
2112 1 z_output 4 0x7 ro 1 0 8
2113 ampl_output 4 0x9–
2113 0 NrOfObjects 0x7 ro 1 0 8
2113 1 ampl_output 4 0x7 ro 1 0 8 –
2114 x_output 5 0x9
–2114 0 NrOfObjects 0x7 ro 1 0 8
2114 1 x_output 5 0x7 ro 1 0 8
2115 y_output 5 0x9
–2115 0 NrOfObjects 0x7 ro 1 0 8
2115 1 y_output 5 0x7 ro 1 0 8
2116 z_output 5 0x9
–2116 0 NrOfObjects 0x7 ro 1 0 8
2116 1 z_output 5 0x7 ro 1 0 8

51
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
2117 ampl_output 5 0x9
–2117 0 NrOfObjects 0x7 ro 1 0 8
2117 1 ampl_output 5 0x7 ro 1 0 8
2118 x_output 6 0x9
–2118 0 NrOfObjects 0x7 ro 1 0 8
2118 1 x_output 6 0x7 ro 1 0 8
2119 y_output 6 0x9
–2119 0 NrOfObjects 0x7 ro 1 0 8
2119 1 y_output 6 0x7 ro 1 0 8
211A z_output 6 0x9
–211A 0 NrOfObjects 0x7 ro 1 0 8
211A 1 z_output 6 0x7 ro 1 0 8
211B ampl_output 6 0x9
–211B 0 NrOfObjects 0x7 ro 1 0 8
211B 1 ampl_output 6 0x7 ro 1 0 8
211C x_output 7 0x9
–211C 0 NrOfObjects 0x7 ro 1 0 8
211C 1 x_output 7 0x7 ro 1 0 8
211D y_output 7 0x9
–211D 0 NrOfObjects 0x7 ro 1 0 8
211D 1 y_output 7 0x7 ro 1 0 8
211E z_output 7 0x9
–211E 0 NrOfObjects 0x7 ro 1 0 8
211E 1 z_output 7 0x7 ro 1 0 8
211F ampl_output 7 0x9
–211F 0 NrOfObjects 0x7 ro 1 0 8
211F 1 ampl_output 7 0x7 ro 1 0 8
2120 x_output 8 0x9
–2120 0 NrOfObjects 0x7 ro 1 0 8
2120 1 x_output 8 0x7 ro 1 0 8
2121 y_output 8 0x9
–2121 0 NrOfObjects 0x7 ro 1 0 8
2121 1 y_output 8 0x7 ro 1 0 8
2122 z_output 8 0x9–
2122 0 NrOfObjects 0x7 ro 1 0 8
2122 1 z_output 8 0x7 ro 1 0 8 –
2123 ampl_output 8 0x9
–2123 0 NrOfObjects 0x7 ro 1 0 8
2123 1 ampl_output 8 0x7 ro 1 0 8
2124 x_output 9 0x9
–2124 0 NrOfObjects 0x7 ro 1 0 8
2124 1 x_output 9 0x7 ro 1 0 8
2125 y_output 9 0x9
–2125 0 NrOfObjects 0x7 ro 1 0 8
2125 1 y_output 9 0x7 ro 1 0 8

3D Smart Sensor Basic Function
52
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
2126 z_output 9 0x9
–2126 0 NrOfObjects 0x7 ro 1 0 8
2126 1 z_output 9 0x7 ro 1 0 8
2127 ampl_output 9 0x9
–2127 0 NrOfObjects 0x7 ro 1 0 8
2127 1 ampl_output 9 0x7 ro 1 0 8
2128 x_output 10 0x9
–2128 0 NrOfObjects 0x7 ro 1 0 8
2128 1 x_output 10 0x7 ro 1 0 8
2129 y_output 10 0x9
–2129 0 NrOfObjects 0x7 ro 1 0 8
2129 1 y_output 10 0x7 ro 1 0 8
212A z_output 10 0x9
–212A 0 NrOfObjects 0x7 ro 1 0 8
212A 1 z_output 10 0x7 ro 1 0 8
212B ampl_output 10 0x9
–212B 0 NrOfObjects 0x7 ro 1 0 8
212B 1 ampl_output 10 0x7 ro 1 0 8
212C x_output 11 0x9
–212C 0 NrOfObjects 0x7 ro 1 0 8
212C 1 x_output 11 0x7 ro 1 0 8
212D y_output 11 0x9
–212D 0 NrOfObjects 0x7 ro 1 0 8
212D 1 y_output 11 0x7 ro 1 0 8
212E z_output 11 0x9
–212E 0 NrOfObjects 0x7 ro 1 0 8
212E 1 z_output 11 0x7 ro 1 0 8
212F ampl_output 11 0x9
–212F 0 NrOfObjects 0x7 ro 1 0 8
212F 1 ampl_output 11 0x7 ro 1 0 8
2130 x_output 12 0x9
–2130 0 NrOfObjects 0x7 ro 1 0 8
2130 1 x_output 12 0x7 ro 1 0 8
2131 y_output 12 0x9–
2131 0 NrOfObjects 0x7 ro 1 0 8
2131 1 y_output 12 0x7 ro 1 0 8 –
2132 z_output 12 0x9
–2132 0 NrOfObjects 0x7 ro 1 0 8
2132 1 z_output 12 0x7 ro 1 0 8
2133 ampl_output 12 0x9
–2133 0 NrOfObjects 0x7 ro 1 0 8
2133 1 ampl_output 12 0x7 ro 1 0 8
2134 x_output 13 0x9
–2134 0 NrOfObjects 0x7 ro 1 0 8
2134 1 x_output 13 0x7 ro 1 0 8

53
3D Smart Sensor Basic Function
UK
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
2135 y_output 13 0x9
–2135 0 NrOfObjects 0x7 ro 1 0 8
2135 1 y_output 13 0x7 ro 1 0 8
2136 z_output 13 0x9
–2136 0 NrOfObjects 0x7 ro 1 0 8
2136 1 z_output 13 0x7 ro 1 0 8
2137 ampl_output 13 0x9
–2137 0 NrOfObjects 0x7 ro 1 0 8
2137 1 ampl_output 13 0x7 ro 1 0 8
2138 x_output 14 0x9
–2138 0 NrOfObjects 0x7 ro 1 0 8
2138 1 x_output 14 0x7 ro 1 0 8
2139 y_output 14 0x9
–2139 0 NrOfObjects 0x7 ro 1 0 8
2139 1 y_output 14 0x7 ro 1 0 8
213A z_output 14 0x9
–213A 0 NrOfObjects 0x7 ro 1 0 8
213A 1 z_output 14 0x7 ro 1 0 8
213B ampl_output 14 0x9
–213B 0 NrOfObjects 0x7 ro 1 0 8
213B 1 ampl_output 14 0x7 ro 1 0 8
213C x_output 15 0x9
–213C 0 NrOfObjects 0x7 ro 1 0 8
213C 1 x_output 15 0x7 ro 1 0 8
213D y_output 15 0x9
–213D 0 NrOfObjects 0x7 ro 1 0 8
213D 1 y_output 15 0x7 ro 1 0 8
213E z_output 15 0x9
–213E 0 NrOfObjects 0x7 ro 1 0 8
213E 1 z_output 15 0x7 ro 1 0 8
213F ampl_output 15 0x9
–213F 0 NrOfObjects 0x7 ro 1 0 8
213F 1 ampl_output 15 0x7 ro 1 0 8
2201 Global_Information 0x9 –
2201 0 NrOfObjects 0x7 ro 4 0 8
–
2201 1 GLOB_master_time 0x7 ro 4 0 8
2201 2 GLOB_sensor_available 0x7 ro 4 0 8
2201 3 SwCtrl_OpMode 0x7 ro 4 0 65
2201 4 Global_Information_cnt 0x7 ro 4 0 3

3D Smart Sensor Basic Function
54
Example
only
Obj
ect N
o.
Obj
ect N
ame
Sub
Inde
x N
o.
Para
met
er
Nam
e
Obj
ect T
ype
Acc
ess
Type
Def
ault
Valu
e
Low
Lim
it
Hig
h Li
mit
Com
men
t
2202 BF Global Parameters 0x9
–
2202 0 NrOfObjects 0x7 ro 4 0 3
2202 1 Number of groups 0x7 ro 4 0 3
2202 2 Number of ROIs 0x7 ro 4 0 3
2202 3 OutputMode 0x7 ro 4 0 3
2202 4 BF_Global_Parameters_cnt 0x7 ro 4 0 3
2203 ROI Definition 0x9
–
2203 0 NrOfObjects 0x7 ro 8 0 3
2203 1 ROI_Definition_cnt 0x7 ro 8 0 3
2203 2 ROI_group 0x7 ro 8 0 3
2203 3 ROI_lower_right_x 0x7 ro 8 0 3
2203 4 ROI_lower_right_y 0x7 ro 8 0 3
2203 5 ROI_number 0x7 ro 8 0 3
2203 6 ROI_value_type 0x7 ro 8 0 3
2203 7 ROI_upper_left_x 0x7 ro 8 0 3
2203 8 ROI_upper_left_y 0x7 ro 8 0 3
2210 SyncMsg 0x9
–2210 0 NrOfObjects 0x7 ro 1 0 3
2210 1 MasterTime_LastTxTimeStamp 0x7 ro 1 0 3
8.2 SAE J1939
Nam
e
Mes
sage
Star
t bit
Leng
th [b
it]
Valu
e ty
pe
Fact
or
Offs
et
Min
imum
Max
imum
Uni
t
Valu
e ta
ble
Com
men
t
ampl_0_cnt BF_ampl_output_0 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_1 BF_ampl_output_0 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_1 –
ampl_output_2 BF_ampl_output_0 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_2 –
ampl_output_3 BF_ampl_output_0 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_3 –
ampl_output_4 BF_ampl_output_0 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_4 –
ampl_1_cnt BF_ampl_output_1 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_5 BF_ampl_output_1 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_5 –
ampl_output_6 BF_ampl_output_1 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_6 –
ampl_output_7 BF_ampl_output_1 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_7 –
ampl_output_8 BF_ampl_output_1 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_8 –
ampl_10_cnt BF_ampl_output_10 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_41 BF_ampl_output_10 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_41 –
ampl_output_42 BF_ampl_output_10 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_42 –
ampl_output_43 BF_ampl_output_10 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_43 –
ampl_output_44 BF_ampl_output_10 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_44 –
ampl_11_cnt BF_ampl_output_11 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_45 BF_ampl_output_11 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_45 –

55
3D Smart Sensor Basic Function
UK
Example
only
Nam
e
Mes
sage
Star
t bit
Leng
th [b
it]
Valu
e ty
pe
Fact
or
Offs
et
Min
imum
Max
imum
Uni
t
Valu
e ta
ble
Com
men
t
ampl_output_46 BF_ampl_output_11 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_46 –
ampl_output_47 BF_ampl_output_11 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_47 –
ampl_output_48 BF_ampl_output_11 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_48 –
ampl_12_cnt BF_ampl_output_12 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_49 BF_ampl_output_12 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_49 –
ampl_output_50 BF_ampl_output_12 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_50 –
ampl_output_51 BF_ampl_output_12 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_51 –
ampl_output_52 BF_ampl_output_12 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_52 –
ampl_12_cnt BF_ampl_output_13 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_49 BF_ampl_output_13 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_53 –
ampl_output_50 BF_ampl_output_13 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_54 –
ampl_output_51 BF_ampl_output_13 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_55 –
ampl_output_52 BF_ampl_output_13 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_56 –
ampl_14_cnt BF_ampl_output_14 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_57 BF_ampl_output_14 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_57 –
ampl_output_58 BF_ampl_output_14 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_58 –
ampl_output_59 BF_ampl_output_14 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_59 –
ampl_output_60 BF_ampl_output_14 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_60 –
ampl_15_cnt BF_ampl_output_15 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_61 BF_ampl_output_15 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_61 –
ampl_output_62 BF_ampl_output_15 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_62 –
ampl_output_63 BF_ampl_output_15 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_63 –
ampl_output_64 BF_ampl_output_15 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_64 –
ampl_2_cnt BF_ampl_output_2 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_10 BF_ampl_output_2 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_10 –
ampl_output_11 BF_ampl_output_2 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_11 –
ampl_output_12 BF_ampl_output_2 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_12 –
ampl_output_9 BF_ampl_output_2 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_9 –
ampl_3_cnt BF_ampl_output_3 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_13 BF_ampl_output_3 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_13 –
ampl_output_14 BF_ampl_output_3 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_14 –
ampl_output_15 BF_ampl_output_3 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_15 –
ampl_output_16 BF_ampl_output_3 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_16 –
ampl_4_cnt BF_ampl_output_4 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_17 BF_ampl_output_4 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_17 –
ampl_output_18 BF_ampl_output_4 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_18 –
ampl_output_19 BF_ampl_output_4 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_19 –
ampl_output_20 BF_ampl_output_4 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_20 –
ampl_5_cnt BF_ampl_output_5 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_21 BF_ampl_output_5 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_21 –
ampl_output_22 BF_ampl_output_5 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_22 –
ampl_output_23 BF_ampl_output_5 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_23 –
ampl_output_24 BF_ampl_output_5 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_24 –
ampl_6_cnt BF_ampl_output_6 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_25 BF_ampl_output_6 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_25 –
ampl_output_26 BF_ampl_output_6 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_26 –

3D Smart Sensor Basic Function
56
Example
only
Nam
e
Mes
sage
Star
t bit
Leng
th [b
it]
Valu
e ty
pe
Fact
or
Offs
et
Min
imum
Max
imum
Uni
t
Valu
e ta
ble
Com
men
t
ampl_output_27 BF_ampl_output_6 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_27 –
ampl_output_28 BF_ampl_output_6 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_28 –
ampl_7_cnt BF_ampl_output_7 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_29 BF_ampl_output_7 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_29 –
ampl_output_30 BF_ampl_output_7 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_30 –
ampl_output_31 BF_ampl_output_7 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_31 –
ampl_output_32 BF_ampl_output_7 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_32 –
ampl_8_cnt BF_ampl_output_8 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_33 BF_ampl_output_8 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_33 –
ampl_output_34 BF_ampl_output_8 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_34 –
ampl_output_35 BF_ampl_output_8 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_35 –
ampl_output_36 BF_ampl_output_8 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_36 –
ampl_9_cnt BF_ampl_output_9 62 2 Unsigned 1 0 0 3 n/a <none> –
ampl_output_37 BF_ampl_output_9 0 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_37 –
ampl_output_38 BF_ampl_output_9 15 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_38 –
ampl_output_39 BF_ampl_output_9 32 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_39 –
ampl_output_40 BF_ampl_output_9 47 15 Unsigned 2 0 0 65534 – VtSig_ampl_output_40 –
BF_Global_Parameters_cnt
BF_Global_Parameters 22 2 Unsigned 1 0 0 3 – <none>
BF_Global_Parameters message counter
Number_of_groups
BF_Global_Parameters 0 7 Unsigned 1 0 0 64 – VtSig_Number_of_
groupsNumber of defined groups
Number_of_rois BF_Global_Parameters 8 7 Unsigned 1 0 0 64 – VtSig_Number_of_rois Number of
defined ROIs
outputMode BF_Global_Parameters 16 3 Unsigned 1 0 0 5 – VtSig_outputMode The output
configuration
x_0_cnt BF_x_output_0 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_1 BF_x_output_0 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_1 –
x_output_2 BF_x_output_0 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_2 –
x_output_3 BF_x_output_0 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_3 –
x_output_4 BF_x_output_0 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_4 –
x_1_cnt BF_x_output_1 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_5 BF_x_output_1 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_5 –
x_output_6 BF_x_output_1 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_6 –
x_output_7 BF_x_output_1 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_7 –
x_output_8 BF_x_output_1 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_8 –
x_10_cnt BF_x_output_10 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_41 BF_x_output_10 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_41 –
x_output_42 BF_x_output_10 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_42 –
x_output_43 BF_x_output_10 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_43 –
x_output_44 BF_x_output_10 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_44 –
x_11_cnt BF_x_output_11 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_45 BF_x_output_11 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_45 –
x_output_46 BF_x_output_11 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_46 –
x_output_47 BF_x_output_11 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_47 –
x_output_48 BF_x_output_11 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_48 –
x_12_cnt BF_x_output_12 62 2 Unsigned 1 0 0 3 n/a <none> –

57
3D Smart Sensor Basic Function
UK
Example
only
Nam
e
Mes
sage
Star
t bit
Leng
th [b
it]
Valu
e ty
pe
Fact
or
Offs
et
Min
imum
Max
imum
Uni
t
Valu
e ta
ble
Com
men
t
x_output_49 BF_x_output_12 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_49 –
x_output_50 BF_x_output_12 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_50 –
x_output_51 BF_x_output_12 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_51 –
x_output_52 BF_x_output_12 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_52 –
x_13_cnt BF_x_output_13 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_53 BF_x_output_13 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_53 –
x_output_54 BF_x_output_13 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_54 –
x_output_55 BF_x_output_13 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_55 –
x_output_56 BF_x_output_13 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_56 –
x_14_cnt BF_x_output_14 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_57 BF_x_output_14 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_57 –
x_output_58 BF_x_output_14 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_58 –
x_output_59 BF_x_output_14 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_59 –
x_output_60 BF_x_output_14 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_60 –
x_15_cnt BF_x_output_15 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_61 BF_x_output_15 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_61 –
x_output_62 BF_x_output_15 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_62 –
x_output_63 BF_x_output_15 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_63 –
x_output_64 BF_x_output_15 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_64 –
x_2_cnt BF_x_output_2 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_10 BF_x_output_2 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_10 –
x_output_11 BF_x_output_2 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_11 –
x_output_12 BF_x_output_2 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_12 –
x_output_9 BF_x_output_2 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_9 –
x_3_cnt BF_x_output_3 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_13 BF_x_output_3 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_13 –
x_output_14 BF_x_output_3 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_14 –
x_output_15 BF_x_output_3 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_15 –
x_output_16 BF_x_output_3 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_16 –
x_4_cnt BF_x_output_4 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_17 BF_x_output_4 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_17 –
x_output_18 BF_x_output_4 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_18 –
x_output_19 BF_x_output_4 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_19 –
x_output_20 BF_x_output_4 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_20 –
x_5_cnt BF_x_output_5 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_21 BF_x_output_5 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_21 –
x_output_22 BF_x_output_5 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_22 –
x_output_23 BF_x_output_5 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_23 –
x_output_24 BF_x_output_5 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_24 –
x_6_cnt BF_x_output_6 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_25 BF_x_output_6 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_25 –
x_output_26 BF_x_output_6 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_26 –
x_output_27 BF_x_output_6 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_27 –
x_output_28 BF_x_output_6 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_28 –
x_7_cnt BF_x_output_7 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_29 BF_x_output_7 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_29 –

3D Smart Sensor Basic Function
58
Example
only
Nam
e
Mes
sage
Star
t bit
Leng
th [b
it]
Valu
e ty
pe
Fact
or
Offs
et
Min
imum
Max
imum
Uni
t
Valu
e ta
ble
Com
men
t
x_output_30 BF_x_output_7 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_30 –
x_output_31 BF_x_output_7 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_31 –
x_output_32 BF_x_output_7 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_32 –
x_8_cnt BF_x_output_8 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_33 BF_x_output_8 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_33 –
x_output_34 BF_x_output_8 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_34 –
x_output_35 BF_x_output_8 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_35 –
x_output_36 BF_x_output_8 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_36 –
x_9_cnt BF_x_output_9 62 2 Unsigned 1 0 0 3 n/a <none> –
x_output_37 BF_x_output_9 0 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_37 –
x_output_38 BF_x_output_9 15 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_38 –
x_output_39 BF_x_output_9 32 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_39 –
x_output_40 BF_x_output_9 47 15 Unsigned 0�01 -100 -100 100 m VtSig_x_output_40 –
y_0_cnt BF_y_output_0 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_1 BF_y_output_0 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_1 –
y_output_2 BF_y_output_0 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_2 –
y_output_3 BF_y_output_0 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_3 –
y_output_4 BF_y_output_0 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_4 –
y_1_cnt BF_y_output_1 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_5 BF_y_output_1 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_5 –
y_output_6 BF_y_output_1 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_6 –
y_output_7 BF_y_output_1 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_7 –
y_output_8 BF_y_output_1 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_8 –
y_10_cnt BF_y_output_10 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_41 BF_y_output_10 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_41 –
y_output_42 BF_y_output_10 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_42 –
y_output_43 BF_y_output_10 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_43 –
y_output_44 BF_y_output_10 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_44 –
y_11_cnt BF_y_output_11 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_45 BF_y_output_11 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_45 –
y_output_46 BF_y_output_11 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_46 –
y_output_47 BF_y_output_11 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_47 –
y_output_48 BF_y_output_11 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_48 –
y_12_cnt BF_y_output_12 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_49 BF_y_output_12 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_49 –
y_output_50 BF_y_output_12 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_50 –
y_output_51 BF_y_output_12 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_51 –
y_output_52 BF_y_output_12 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_52 –
y_13_cnt BF_y_output_13 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_53 BF_y_output_13 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_53 –
y_output_54 BF_y_output_13 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_54 –
y_output_55 BF_y_output_13 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_55 –
y_output_56 BF_y_output_13 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_56 –
y_14_cnt BF_y_output_14 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_57 BF_y_output_14 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_57 –
y_output_58 BF_y_output_14 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_58 –

59
3D Smart Sensor Basic Function
UK
Example
only
Nam
e
Mes
sage
Star
t bit
Leng
th [b
it]
Valu
e ty
pe
Fact
or
Offs
et
Min
imum
Max
imum
Uni
t
Valu
e ta
ble
Com
men
t
y_output_59 BF_y_output_14 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_59 –
y_output_60 BF_y_output_14 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_60 –
y_15_cnt BF_y_output_15 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_61 BF_y_output_15 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_61 –
y_output_62 BF_y_output_15 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_62 –
y_output_63 BF_y_output_15 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_63 –
y_output_64 BF_y_output_15 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_64 –
y_2_cnt BF_y_output_2 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_10 BF_y_output_2 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_10 –
y_output_11 BF_y_output_2 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_11 –
y_output_12 BF_y_output_2 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_12 –
y_output_9 BF_y_output_2 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_9 –
y_3_cnt BF_y_output_3 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_13 BF_y_output_3 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_13 –
y_output_14 BF_y_output_3 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_14 –
y_output_15 BF_y_output_3 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_15 –
y_output_16 BF_y_output_3 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_16 –
y_4_cnt BF_y_output_4 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_17 BF_y_output_4 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_17 –
y_output_18 BF_y_output_4 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_18 –
y_output_19 BF_y_output_4 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_19 –
y_output_20 BF_y_output_4 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_20 –
y_5_cnt BF_y_output_5 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_21 BF_y_output_5 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_21 –
y_output_22 BF_y_output_5 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_22 –
y_output_23 BF_y_output_5 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_23 –
y_output_24 BF_y_output_5 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_24 –
y_6_cnt BF_y_output_6 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_25 BF_y_output_6 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_25 –
y_output_26 BF_y_output_6 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_26 –
y_output_27 BF_y_output_6 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_27 –
y_output_28 BF_y_output_6 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_28 –
y_7_cnt BF_y_output_7 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_29 BF_y_output_7 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_29 –
y_output_30 BF_y_output_7 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_30 –
y_output_31 BF_y_output_7 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_31 –
y_output_32 BF_y_output_7 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_32 –
y_8_cnt BF_y_output_8 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_33 BF_y_output_8 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_33 –
y_output_34 BF_y_output_8 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_34 –
y_output_35 BF_y_output_8 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_35 –
y_output_36 BF_y_output_8 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_36 –
y_9_cnt BF_y_output_9 62 2 Unsigned 1 0 0 3 n/a <none> –
y_output_37 BF_y_output_9 0 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_37 –
y_output_38 BF_y_output_9 15 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_38 –
y_output_39 BF_y_output_9 32 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_39 –

3D Smart Sensor Basic Function
60
Example
only
Nam
e
Mes
sage
Star
t bit
Leng
th [b
it]
Valu
e ty
pe
Fact
or
Offs
et
Min
imum
Max
imum
Uni
t
Valu
e ta
ble
Com
men
t
y_output_40 BF_y_output_9 47 15 Unsigned 0�01 -100 -100 100 m VtSig_y_output_40 –
z_0_cnt BF_z_output_0 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_1 BF_z_output_0 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_1 –
z_output_2 BF_z_output_0 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_2 –
z_output_3 BF_z_output_0 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_3 –
z_output_4 BF_z_output_0 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_4 –
z_1_cnt BF_z_output_1 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_5 BF_z_output_1 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_5 –
z_output_6 BF_z_output_1 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_6 –
z_output_7 BF_z_output_1 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_7 –
z_output_8 BF_z_output_1 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_8 –
z_10_cnt BF_z_output_10 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_41 BF_z_output_10 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_41 –
z_output_42 BF_z_output_10 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_42 –
z_output_43 BF_z_output_10 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_43 –
z_output_44 BF_z_output_10 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_44 –
z_11_cnt BF_z_output_11 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_45 BF_z_output_11 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_45 –
z_output_46 BF_z_output_11 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_46 –
z_output_47 BF_z_output_11 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_47 –
z_output_48 BF_z_output_11 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_48 –
z_12_cnt BF_z_output_12 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_49 BF_z_output_12 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_49 –
z_output_50 BF_z_output_12 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_50 –
z_output_51 BF_z_output_12 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_51 –
z_output_52 BF_z_output_12 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_52 –
z_13_cnt BF_z_output_13 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_53 BF_z_output_13 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_53 –
z_output_54 BF_z_output_13 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_54 –
z_output_55 BF_z_output_13 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_55 –
z_output_56 BF_z_output_13 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_56 –
z_14_cnt BF_z_output_14 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_57 BF_z_output_14 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_57 –
z_output_58 BF_z_output_14 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_58 –
z_output_59 BF_z_output_14 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_59 –
z_output_60 BF_z_output_14 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_60 –
z_15_cnt BF_z_output_15 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_61 BF_z_output_15 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_61 –
z_output_62 BF_z_output_15 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_62 –
z_output_63 BF_z_output_15 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_63 –
z_output_64 BF_z_output_15 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_64 –
z_2_cnt BF_z_output_2 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_10 BF_z_output_2 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_10 –
z_output_11 BF_z_output_2 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_11 –
z_output_12 BF_z_output_2 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_12 –
z_output_9 BF_z_output_2 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_9 –

61
3D Smart Sensor Basic Function
UK
Example
only
Nam
e
Mes
sage
Star
t bit
Leng
th [b
it]
Valu
e ty
pe
Fact
or
Offs
et
Min
imum
Max
imum
Uni
t
Valu
e ta
ble
Com
men
t
z_3_cnt BF_z_output_3 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_13 BF_z_output_3 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_13 –
z_output_14 BF_z_output_3 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_14 –
z_output_15 BF_z_output_3 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_15 –
z_output_16 BF_z_output_3 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_16 –
z_4_cnt BF_z_output_4 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_17 BF_z_output_4 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_17 –
z_output_18 BF_z_output_4 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_18 –
z_output_19 BF_z_output_4 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_19 –
z_output_20 BF_z_output_4 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_20 –
z_5_cnt BF_z_output_5 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_21 BF_z_output_5 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_21 –
z_output_22 BF_z_output_5 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_22 –
z_output_23 BF_z_output_5 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_23 –
z_output_24 BF_z_output_5 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_24 –
z_6_cnt BF_z_output_6 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_25 BF_z_output_6 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_25 –
z_output_26 BF_z_output_6 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_26 –
z_output_27 BF_z_output_6 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_27 –
z_output_28 BF_z_output_6 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_28 –
z_7_cnt BF_z_output_7 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_29 BF_z_output_7 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_29 –
z_output_30 BF_z_output_7 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_30 –
z_output_31 BF_z_output_7 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_31 –
z_output_32 BF_z_output_7 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_32 –
z_8_cnt BF_z_output_8 62 2 Unsigned 1 0 0 3 n/a <none> –
z_output_33 BF_z_output_8 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_33 –
z_output_34 BF_z_output_8 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_34 –
z_output_35 BF_z_output_8 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_35 –
z_output_36 BF_z_output_8 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_36 –
z_9_cnt BF_z_output_9 62 2 Unsigned 1 0 0 3 n/a <none>
z_output_37 BF_z_output_9 0 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_37 –
z_output_38 BF_z_output_9 15 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_38 –
z_output_39 BF_z_output_9 32 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_39 –
z_output_40 BF_z_output_9 47 15 Unsigned 0�01 -100 -100 100 m VtSig_z_output_40 –
GLOB_master_time Global_Information 0 32 Unsigned 1 0 0 4,29E+14 µs <none> –
GLOB_sensor_available Global_Information 32 8 Unsigned 1 0 0 255 enum <none>
BIT_INTERFERENCE_DETECTED (1u)
Global_Information_cnt Global_Information 46 2 Unsigned 1 0 0 3 – <none> –
SwCtrl_OpMode Global_Information 40 6 Unsigned 1 0 0 63 – VtSig_SwCtrl_OpMode –

3D Smart Sensor Basic Function
62
Example
only
Nam
e
Mes
sage
Star
t bit
Leng
th [b
it]
Valu
e ty
pe
Fact
or
Offs
et
Min
imum
Max
imum
Uni
t
Valu
e ta
ble
Com
men
t
ROI_cnt ROI_Definition 38 2 Unsigned 1 0 0 3 n/a <none>
2 Bit counter, same all ROI messages, at next ROI message cycle, counter shall be incremented
ROI_group ROI_Definition 16 7 Unsigned 1 0 0 64 n/a <none>Index of group the ROI belongs to
ROI_lower_right_x ROI_Definition 8 6 Unsigned 1 0 0 63 n/a <none>
Lower right corner coordinate in x-direction
ROI_lower_right_y ROI_Definition 24 4 Unsigned 1 0 0 15 n/a <none>
Lower right corner coordinate in y-direction
ROI_number ROI_Definition 32 6 Unsigned 1 1 1 64 n/a <none>Id of the ROI, equals the index in the array
ROI_output_value_type ROI_Definition 6 2 Unsigned 1 0 0 2 n/a VtSig_ROI_output_
value_type
The type of output (min/max/mean)
ROI_upper_left_x ROI_Definition 0 6 Unsigned 1 0 0 63 n/a <none>Upper left corner coordinate in x-direction
ROI_upper_left_y ROI_Definition 28 4 Unsigned 1 0 0 15 n/a <none>Upper left corner coordinate in y-direction
Mastertime_LastTxTimeStamp SyncMsg 0 32 Unsigned 1 0 0 4,29E+14 us <none>
Measured time value of last sent transmission of this signal on CAN