Embed Size (px)
Citation preview

OBSERVATIONAL EVALUATION OF EVENT CAMERAS PERFORMANCE
IN OPTICAL SPACE SURVEILLANCE
Michał Żołnowski(1)
, Rafal Reszelewski(2)
, Diederik Paul Moeys(3)
, Tobi Delbruck(3)
, Krzysztof Kamiński(4)
(1) 6 Remote Observatories for Asteroids and Debris Searching (6ROADS),Godebskiego 55a, 31-999 Kraków, Poland,
Koszalin University of Technology, [email protected] (3)
Sensors Group, Institute of Neuroinformatics, UZH-ETH Zurich, Winterthurerstr. 190, CH-8057 Zurich,
Astronomical Observatory Institute, Faculty of Physics, A.Mickiewicz
University, Słoneczna 36, 60-286 Poznań, Poland, [email protected]
ABSTRACT
Dynamic vision sensor (DVS) event cameras possess a
unique feature of outputting only sparse and
asynchronous brightness changes rather than the
conventional image sensor measurement of average
intensity level during a fixed exposure time. This new
technology opens a window of opportunity for SST,
especially for survey observations, where users are
mostly interested in detecting objects moving within the
telescope's field of view. In this work we present a
comparison between a regular global-shutter CMOS
camera (QHY174-GPS) and several DVS-based DAVIS
cameras, which can concurrently output standard frames
and DVS events. The measurements include new
sensors, so far uncharacterized for space surveillance,
specifically the first back illuminated DAVIS
(BSIDAVIS) and a DAVIS with more sensitive
temporal contrast threshold (SDAVIS). The sensors
were observationally tested during stellar observing runs
with varying telescope tracking speed to simulate SST
targets on different orbits, using identical optics and
under the same weather conditions. Observations
included daytime sky targets with high sky brightness.
The minimum detectable object magnitudes and
maximum object speeds were quantitatively assessed.
The potential of existing event-based sensors is
evaluated and future upgrades to DVS designs to fully
utilize this technology in SST are discussed.
1. INTRODUCTION
Space surveillance and tracking (SST) is of increasing
importance because of the growing number of active
satellites and space debris which increases the risks of
collision, and the threat of the Kessler phenomenon,
which could make low earth orbits (LEO) inaccessible.
SST optical methods are traditionally considered
primary source of tracking and surveillance data for
higher orbits due to satellites low proper motions and
relaxed image timing requirements which are possible to
fulfill using regular astronomical CCD and CMOS
image sensor (CIS) cameras [1]. Optical surveillance in
the LEO region has been developing rapidly in recent
years because of the emergence of low cost and high
spatial resolution cameras delivering high lateral
position precision [2]. It is an interesting supplement, or
even alternative, to expensive radar installations that
provide precise orbit altitude, but poor lateral precision.
By contrast, optical SST can use mount encoder
readings or fixed stars as known reference points to
compute precise astrometric positions.
1.1 Standard camera optical SST
Optical SST observations are divided into two main
categories: survey and tracking. The principle of optical
survey is to watch the sky to detect and identify any
moving object in the sensor field of view, and to add
new objects identified as Earth satellites to a catalog. In
tracking observations, the aim is to follow up already
known objects to improve their orbital parameters,
characterise maneuvers, and to update close pass
predictions for collision avoidance. In both cases
camera image timing is of critical importance. For
higher orbits it is sufficient to time images with
accuracy at the level of tens of milliseconds, but for
LEO sub-millisecond accuracy is required to obtain 1
arcsec astrometric accuracy. It is obviously very hard to
obtain such an accuracy with mechanical shutter and
large CCD array. Moreover short exposure times
translates to read noise dominated images. Therefore
low-noise CMOS image sensor (CIS) with global
electronic shutter is recently becoming a standard
detector for low orbit tracking and survey.
LEO objects move rapidly across the image; for
example a satellite in 500km orbit moves at an apparent
speed of 0.9 deg/s at zenith. It crosses the field of view
(FOV) of the CIS camera we used for this study in only
1.4s in zenith. Assuming diffraction size of 2arcsec, it
spends only 0.7ms over each pixel. If the object moves
too quickly, the time spent by it over each pixel
Proc. 1st NEO and Debris Detection Conference, Darmstadt, Germany, 22-24 January 2019, published by the ESA Space Safety Programme Office
Ed. T. Flohrer, R. Jehn, F. Schmitz (http://neo-sst-conference.sdo.esoc.esa.int, January 2019)

becomes too small and the signal is lost in the noise.
SST observations could benefit from recently developed
dynamic vision sensors (DVS) event cameras in the
following areas. Day-time observations thanks to high
dynamic range, data flow reduction due to the nature of
these cameras and possible astrometric accuracy
improvement due to separate time records from each
pixel.
1.2 Dynamic vision sensor (DVS) event cameras
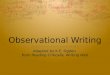
Fig. 1 shows the recorded output of a “dynamic and
active pixel vision sensor” (DAVIS) event camera [3],
[4]. A DAVIS concurrently outputs conventional global
shutter frames and DVS brightness change events. The
brightness change events are in the form of timestamped
address-events (x,y,p,t), where x and y are the pixel
coordinates, p is the sign (ON or OFF) of the brightness
change, and t is the time of the event in microseconds.
The DVS output is attractive for various applications
because of its low latency, sparsity, and high dynamic
range. It allows applications to only process the
changing pixels and to do so with sub millisecond
latency.
Event camera prototypes are now commercially
available, although the most advanced types are still
laboratory objects. A main aim of this paper was to
evaluate new event camera prototypes for SST
applications.
Figure 1. In response to the spinning dot, a DAVIS
outputs frames (on demand) and a concurrent stream
of brightness change events (adapted from Delbruck,
2018, unpublished).
1.3 Optical SST with DVS
Using DVS for SST, was first proposed in [1]. The
results reported in that paper stimulated the current
study, which aimed for a quantitative comparison of star
magnitude and speed detection limits from CIS and
DAVIS.
Fig. 2 shows an example of BSIDAVIS (see Sec. 2) data
collected for this study from a GlobalStar M008 satellite
flyby event at altitude 1530km. The satellite transited
about 350 pixels in 3s (~100 pixels/s). For clarity, the
raw data was filtered using jAER1 software noise
1 http://jaerproject.net
reduction filters using parameters listed in the figure
caption, which removed about 96% of the events.
A
B
Figure 2. Spacetime data from flyby of GlobalStar
25309. Approximately 96% of the raw data was
filtered out using SpatioTemporalCorrelationFilter
and HotPixelFilter with the criterion of at least
3 active neighbours of the closest 36 pixels during the
past 10ms. A: spacetime plot. B: accumulated events
over 3.4s. Speed: 101 pix/s. Green: ON events.
Red: OFF events.
2, EQUIPMENT and METHODOLOGY
Cameras: Tab. 1 compares the cameras used in this
study. The global-shutter CIS camera (QHY174-GPS2)
used in this paper is the first commercially available
astronomical camera which is integrated by its
manufacturer with a GPS receiver. The camera is
specifically designed for time resolved astronomy and
provides exposure time with a precision claimed to be at
the level of 10-6
s. It also includes electronic cooling
which was not used for this study due to short exposure
times.
2 http://www.qhyccd.com

The two DAVIS sensors used in this study are the first
back illuminated DAVIS (BSIDAVIS) [5] and the first
sensitive-DVS DAVIS camera (SDAVIS) [6]. These are
experimental cameras developed by the Sensors Group
at the Institute of Neuroinformatics. The BSIDAVIS has
higher quantum efficiency from its 100% effective fill
factor, and the SDAVIS is sensitive to smaller
brightness changes from the increased gain in its
preamplifier.
Observatory: We compared the cameras using an
experimental observatory located in Krakow during the
months of September and December 2018. The
observatory is equipped with a Takahashi Sky90
(90mm aperture, f/5.5) and a star+satellite tracking
motorized mount Bisque Paramount MX.
Table 1. Camera specifications.
QHY174-
GPS
BSIDAVIS
[5] SDAVIS [6]
Type CIS, global
shutter DAVIS DAVIS
Pixel array 1920x1200 346x260 188x192
Pixel size (um) 5.86 18.5 18.5
/Active area(mm) 11.3x7.0 6.4x4.8 3.5x3.6
Peak QE (%) 78 92 ~20
Fill factor (%) NA ~100 21.2
APS Dark current
@25°C (e/s) ~37 ~16k 16k
CIS DR (dB) 43-75* 53 53
CIS read noise (e) 1.6-5.3* 60 60
CIS conv gain
(uV/e) NA 22 22
DVS min
threshold (%) NA 15* 3.5*
DVS DR (dB) NA >120 >100
Pixel image scale
[arcsec]♱ 2.39 7.70 7.70
FoV [arcmin]♱ 76x49 44x33 25x25
* - depending on gain settings;
♱ - using 90mm f/5.5 telescope.
In this paper we simplified the problem of detection to
visually observing image streaks in the CIS and
accumulated-event DVS images, as explained below.
2.1 Nighttime observations
The goal was to assess the minimum magnitude object
that each sensor could detect. The BSIDAVIS has about
4X higher QE than the equivalent front-side illuminated
DAVIS [5] and about 12X higher QE than the
DAVIS240C used in [7]. Therefore we were interested
in whether this higher QE allows detecting fainter and
faster moving objects compared with the CIS.
We used the Pleiades constellation as a collection of
stars with known magnitude that we could easily
identify in a star catalog. The goal here was to traverse
the stars with speeds ranging from 7 arcsec/s to 3.5
deg/s (DAVIS 1.8 pix/s to 1800 pix/s, CIS 5.7 pix/s to
5700 pix/s). We use sidereal (fixed mount) for the
slowest speed and the telescope drive motor for faster
speeds. We captured data with 1X, 10X, 100X, and
300X sidereal speeds.
2.2 Daytime observations
The BSIDAVIS minimum temporal contrast threshold is
about 15% change in intensity, so it is not suitable for
detecting low contrast objects such as those expected in
daytime observation against a bright sky. The SDAVIS
QE is only about 20%, and the circuit design does not
function well at very low photocurrents. However, it’s
photoreceptor preamplifier provides it a higher temporal
contrast sensitivity (down to 3.5%). Therefore we were
particularly interested in exploring whether it allowed
observation of daytime or evening/dawn satellite
tracking.
To assess this possibility, using the SDAVIS, we
imaged several brighter stars during daytime (Vega and
Deneb) using the same apparent motion methods as for
nighttime observations. Cloudy winter weather and
difficulty adjusting the prototype’s sensor parameters
severely limited observational time so these results are
very preliminary.
2.3 Pixel transit time considerations
CIS: During any finite CIS exposure, the satellite may
pass over many pixels, resulting in a streak in the image.
The detection limits for CIS SST are mainly from the
limited time that a satellite spends over each pixel. The
increased light exposure resulting from the satellite is
inversely proportional to the speed of the satellite. The
faster the satellite moves, the less time it spends over the
pixel, and the dimmer is the resulting streak. The entire
image is also exposed to dark current, which increases
the value of each pixel according to the product of dark
current and exposure time.
DVS: Since pixels continuously monitor the
photocurrent, a satellite is only detected if the
momentary increase in photocurrent caused by the
transit is detected as an event, i.e. if it causes a relative
change of the filtered photocurrent exceeding the
temporal contrast threshold. [8] analyzed this case in the
context of particle tracking velocimetry. It found that
the required pixel bandwidth is proportional to the
inverse of the pixel transit time, i.e. if the object
produces a Gaussian deflection of photocurrent and the
full width at half maximum of this deflection is 1ms,
then the required bandwidth to produce a full-contrast
response is a few times . The

DVS pixel bandwidth is a linearly increasing function of
the photocurrent [3]. It means that the brighter the star,
the faster the bandwidth. However, the bandwidth of the
pixel is also controlled by the analog bias currents for
the photoreceptor and source follower buffers. By
settings these bias currents small, the front end circuit
can limit its bandwidth and hence increase its
integration time, as well as reducing the shot noise.
However, the quantitative value of the bandwidth
produced by a particular magnitude is difficult to
estimate, and has only been measured under particular
bias conditions for some DVS [3], [6]. As for CIS, the
situation is complicated by the dark current, which in
the case of DVS decreases the photocurrent contrast. In
the case of a dim star, the contrast of the star is reduced
by the background dark current.
CIS: For the measurements reported here that start with
the slowest transit speed of 1X sidereal, we determined
an optimal time of exposure of 500ms, as follows. We
estimate star point spread function (PSF) FWHM is 1.9
pixels, or 4.5 arcsec, and the CIS pixel resolution is 2.39
arcsec.
With the speed 1X sidereal, star travels 15 arcsec/s, or
6.28 pixels/s. In 200ms, a star travels only 1.26 pixels,
which is less than its own PSF. But in 500ms, it travels
3.14 pixels, which is about 150% of its diameter.
Therefore with a 500ms exposure, we are assured that
any star will cross at least several pixels, causing a full
exposure of the pixel to the star.
DVS: Since the DVS has no exposure time, we simply
recorded continuous DVS output during the
constellation transit. When possible by sufficient
observation time, we varied the photoreceptor and
source follower bias currents to study the effect of front
end bandwidth on maximum transit speed and noise and
used the subjectively optimal parameters for the results
reported here.
Detection: We determined the limiting magnitude star
by visual inspection of the DVS accumulated event
image and the single CIS image. We considered the
dimmest track with clearly detectable start and end
points as the limiting magnitude.
3. RESULTS
3.1 Limiting magnitude (night)
telescope speed: 1x sidereal
telescope speed: 10x sidereal
telescope speed: 100x sidereal
telescope speed: 300x sidereal
Figure 3. BSIDAVIS events accumulated during 320ms
for Pleiades transits at different speeds. V magnitudes
are overplotted for selected stars.

Fig. 3 shows raw BSIDAVIS DVS event data for the
tracking experiment. Each panel is a 2D histogram of
accumulated DVS events during part of the scan. Stars
are visible as streaks. Identified stars are labelled with
their magnitudes for each experiment. At 1X sidereal,
many more stars are visible than at 300X. For each
speed, the faintest visible streak was identified by eye.
telescope speed: 1x sidereal
telescope speed: 10x sidereal
telescope speed: 100x sidereal
telescope speed: 300x sidereal
Figure 4. 500ms CIS frames for Pleiades transits at
different speeds. V magnitudes are overplotted for
selected stars.
Fig. 4 shows the same type of data but for the CIS.
Tab. 2 and Fig. 5 show the lower limiting magnitude for
DVS and CIS versus speed. For each sensor, the faster
the movement, the brighter must be the star to observe a
track. The CIS can detect stars that are dimmer on
average by about 1.6 magnitude than the DVS (a factor
of about 4.3).
Table 2. Limiting V magnitude
Speed
(x sidereal)
DAVIS
(mag.) CIS (mag.) diff.
1x 10,38 11,9 1,52
10x 9,22 10,52 1,30
100x 7,19 8,97 1,78
300x 5,45 7,19 1,74
Figure 5. Estimated nighttime limiting magnitude
versus relative sidereal speed.
3.2 Limiting magnitude (daytime)
We repeated the experiment during daytime using the
SDAVIS, although we were not able to compare with
the QHY CIS. As mentioned, observation time was
limited to a single session with clear weather and
daytime conditions. At about 11:00 on a slightly
overcast November day in Krakow with high cirrus
clouds, we located and recorded observations of Vega
(mag 0). Vega could be observed by eye in the
telescope. Using the APS mode of SDAVIS, we
observed that the sky brightness was 2.2e4 DN/s3. Vega
produced 2.75e4 DN/s and thus had a contrast of about
1.25X against the sky.
A caveat on the data presented here is that the SDAVIS
3 DN is digital number; 1 DN=1.23mV=56e
-.

was not optimally configured owing to a lack of
understanding of the rather complex controls. It means
that the background activity rate (of noise OFF events)
was very high and the sensitivity was not optimized.
There was also a periodic oscillation of the activity
probably caused by power supply load positive
feedback. This periodic pulsation at a frequency of
about 1.7Hz somewhat obscured the star tracks.
We observed Vega using the telescope drive to create
transits. Fig. 6 shows traces from two of the recordings.
We could easily track Vega for transits up to 0.6 deg/s
(270 pix/s).
We did not succeed to catch any daytime satellites in
this session. Subsequently we were able to adjust the
SDAVIS biases for better performance but cloudy skies
prevented any further observations.
Figure 6. Daytime tracks of DVS events from SDAVIS.
showing only ON events. Tracks of Vega at two
speeds: 318ms at 0.04deg/s and 80ms at 0.6deg/s.
No noise filtering was applied.
4. DISCUSSION
The results of this comparative study show that for
nighttime observation, the current state of the art DVS
sensor (BSIDAVIS) offers about 1.6 mag worse limiting
magnitude compared to the QHY CIS camera. Current
prototype DVS sensors do not offer superior absolute
detection capability, despite its larger pixel size and
higher QE peak. It is however worth noting that the
FWHM of CIS images was significantly lower
(~5 arcsec compared to ~15 arcsec), which was caused
partially due to DVS charge leakage between pixels and
partially due to focusing errors.
From the DVS event tracks, although we have not
demonstrated it in this paper, we believe it would be
possible in real time to precisely estimate the satellite
location, with precision down to sub-millisecond and
system latency of a few milliseconds.
From the CIS streaks, it should also be possible to
accurately determine object speed. From the CIS start
and end frame times it should also be possible to
determine absolute sky position with the timing
precision of the known shutter times.
Therefore, both cameras appear to offer roughly
comparable capability of survey and tracking, although
the CIS sensor clearly offers higher spatial resolution.
The data volume from DVS especially after noise
filtering is much lower than from CIS, even at low CIS
frame rate. At 2Hz (500ms exposure time) CIS frame
rate, a QHY sensor output data rate is 4.6M pixel/s. A
CIS sensor of same spatial resolution to the BSIDAVIS
would output a data rate of about 346x260x2=180k
pixels/s. This data rate is still much higher than the raw
BSIDAVIS data rate of about 30k events/s. After
modest correlation and hot pixel noise filtering of
BSIDAVIS, the data rate drops to less than 5k events/s,
which is a factor of 36 smaller than from the
downscaled CIS sensor. This low rate puts real time
analysis of the DVS data in reach of small embedded
platforms like Raspberry Pi.
Therefore, the main results of this study are the
following:
1. For nighttime observation, the prototype
BSIDAVIS offers 4X lower sensitivity and
timing resolution than the QHY CIS sensor,
but at factors of 10s or 100s less data rate.
2. For daytime observation, the prototype
SDAVIS can detect Vega in noonday northern
latitude conditions at speeds up at least
0.6 deg/s (450 pix/s).
A sensor with higher pixel count that combines the
higher event sensitivity of the SDAVIS pixel circuit
with the high quantum efficiency of the BSIDAVIS
back illumination process technology would appear to
offer useful capabilities for survey and tracking
applications, for both nighttime and perhaps daytime
observation of LEO objects.
A DVS camera outputs pixel position and time for every
event on each pixel while CIS outputs only two times
(beginning and end of exposure) for all pixels. A single
image from CIS is usually transformed using tools such
Vega at 0.6 deg/s
Vega at 0.04 deg/s

as sextractor4 to a target's single pixel position at a
single time of mid-exposure. DVS data creates an
opportunity to develop a dedicated astrometric
procedure that would utilize additional timing
information and analyze satellite positions at much
higher rate than possible from CIS images. It is possible
that for bright targets, such a procedure would produce a
superior astrometric accuracy compared to regular CIS
measurements. The shorter latency of these
measurements could also enable real time telescope
drive control to track new objects. These capabilities of
course require verification with future observational
tests of DVS cameras.
Acknowledgments
We thank Greg Cohen for discussion leading to this
study. The EU projects CAVIAR, SEEBETTER, and
VISUALISE and Samsung Inst. of Technology helped
fund the DAVIS camera developments. inilabs.com and
inivation.com provided technical support with camera
hardware.
REFERENCES
[1] M. Shoemaker and L. Shroyer, Historical Trends in
Ground-Based Optical Space Surveillance System
Design. adsabs.harvard.edu, 2007 [Online]. Available:
https://ui.adsabs.harvard.edu/\#abs/2007amos.confE...1S
[2] K. Kamiński, E. Wnuk, J. Gołębiewska, M. Krużyński,
and M. K. Kamińska, “LEO Cubesats Tracking with a
Network of Polish Optical SST Sensors,” in Proceedings
of the AMOS conference, Hawaii, USA, 2018.
[3] P. Lichtsteiner, C. Posch, and T. Delbruck, “A 128x128
120dB 15us Latency Asynchronous Temporal Contrast
Vision Sensor,” IEEE J. Solid-State Circuits, vol. 43, no.
2, pp. 566–576, Feb. 2008 [Online]. Available:
http://dx.doi.org/10.1109/JSSC.2007.914337
[4] C. Brandli, R. Berner, M. Yang, S.-C. Liu, and T.
Delbruck, “A 240x180 130 dB 3 us Latency Global
Shutter Spatiotemporal Vision Sensor,” IEEE J. Solid-
State Circuits, vol. 49, no. 10, pp. 2333–2341, Oct. 2014
[Online]. Available:
http://dx.doi.org/10.1109/JSSC.2014.2342715
[5] G. Taverni et al., “Front and Back Illuminated Dynamic
and Active Pixel Vision Sensors Comparison,” IEEE
Trans. Circuits Syst. Express Briefs, vol. 65, no. 5, pp.
677–681, May 2018 [Online]. Available:
https://ieeexplore.ieee.org/document/8334288/?arnumber
=8334288&source=authoralert
[6] D. P. Moeys et al., “A Sensitive Dynamic and Active
Pixel Vision Sensor for Color or Neural Imaging
Applications,” IEEE Trans. Biomed. Circuits Syst., vol.
PP, no. 99, pp. 1–14, 2017 [Online]. Available:
http://dx.doi.org/10.1109/TBCAS.2017.2759783
[7] G. Cohen et al., “Event-based Sensing for Space
Situational Awareness,” in Proc. the Advanced Maui
Optical and Space Surveillance Technologies
Conf.,(AMOS, 2017, p. 25 [Online]. Available:
https://amostech.com/TechnicalPapers/2017/Optical-
4 www.astromatic.net/software/sextractor
Systems/Cohen.pdf. [Accessed: 03-Feb-2018]
[8] D. J. Borer, “4D Flow Visualization with Dynamic
Vision Sensors,” ETH Zurich, Zurich, Switzerland, 2014
[Online]. Available: https://e-
collection.library.ethz.ch/view/eth:47156