Embed Size (px)
DESCRIPTION
EULER METHODS
Citation preview

Integration of OrdinaryDifferential Equations
dy/dt = f(t,y)
Integration of OrdinaryDifferential Equations
dy/dt = f(t,y)
Agus SuryantoDepartment of Mathematics
Faculty of Mathematics and Natural Sciences
Brawijaya University
E-mail: [email protected]
Agus SuryantoDepartment of Mathematics
Faculty of Mathematics and Natural Sciences
Brawijaya University
E-mail: [email protected]

Definition of the problem:Integration of a system of ordinary differential equations (ODEs) in the explicit form:
with the following initial conditions:
Definition of the problem:Integration of a system of ordinary differential equations (ODEs) in the explicit form:
with the following initial conditions:
Definition of the Problem
( ) ( ) ,d
t t f tdt
y y y
0 0( )t y y

Order of the ODE:A system of ODEs of order m is defined as:
with the following initial conditions:
This system can be transformed into a system of ODEs of first order by introducing as new variables:
Order of the ODE:A system of ODEs of order m is defined as:
with the following initial conditions:
This system can be transformed into a system of ODEs of first order by introducing as new variables:
Higher Order ODEs
( ) ( 1), , ', ,m mf t y y y y
0 0( )t y y 0 0'( ) 't y y ( 1) ( 1)
0 0( )m mt y y…
1y y
2'y y ( 1)m
m
y y…
2
( 0) 2
2 ( ) ( 0) 0
( 0) 1
y t
y y y y t with y t
y t
1 1 2
2 2 32
3 3 3 2 12 ( )
y y y y
y y y y
y y y y y y t
10
00
20
3
2
1
y
y
y

Autonomous Systems
Definition:
A system is autonomous when the independent variable t does not explicitly appear in the system.
Definition:
A system is autonomous when the independent variable t does not explicitly appear in the system.
( )t f y y
It is always possible to transform a non-autonomous system of ODEs into an autonoumous one
( ) ,y t f t y 1 1 1 2
2 2
( , )
1
y y y f y y
y t y

Example: One ODE
( ) 2
(0) 1
y t y t
y
( ) ( )
'( ) ( ) ( ) ( )
( ) ( )p s ds p s ds
y t r t p t y t
y t e k r t e dt
Johann Bernoulli (Basel, July 27, 1667 - January 1, 1748)
21( ) 3 2 1
4ty t e t
0 0.2 0.4 0.6 0.8 11
2
3
4
5
6
7
t
y
Numerical solution?

Example: One ODE
( ) 2
(0) 1
y t y t
y
21( ) 3 2 1
4ty t e t
0 0.2 0.4 0.6 0.8 11
2
3
4
5
6
7
t
y
Let us use the Taylor expansion of y(t):
2
1 1 1
2 2( , )
n n n n n nn
n n n n n
dyy y t t o t t
dt
y y h o h y h f t y o h
1 ( , )n n n ny y hf t y
0 0.2 0.4 0.6 0.8 11
2
3
4
5
6
7
t
y1
0.2
1.4
h
y
00 0
0
1( , ) 2
0
yf t y
t
Leonhard Euler (Basel, April 15, 1707 – September 18, 1783)
• y = f(x)
• ( ) 0ut

Example: One ODE
( ) 2
(0) 1
y t y t
y
21( ) 3 2 1
4ty t e t
1 ( , )n n n ny y hf t y
0 0.2 0.4 0.6 0.8 11
2
3
4
5
6
7
t
y
In the next slides, the following notation will be used:y(tn) = exact values of the variables y in tn
yn = approximate values of the variables y in tn
y’(tn) = exact values of the derivatives y’ in tn
y’n = approximate values of the derivatives y’ in tn
h = integration step

Few More Definitions…
One step integration algorithms:
Multi-step integration algorithms:
Explicit integration algorithms:
Implicit integration algorithms:
One step integration algorithms:
Multi-step integration algorithms:
Explicit integration algorithms:
Implicit integration algorithms:
1,nn n n
h t y y f y
1 12 ,nn n n
h t y y f y
1
2 1
1 21
,
,
/ 2
n n
n n
n n
h t
h t h
k f y
k f y k
y y k k
11 1,nn n n
h t y y f y

Accuracy of Integration Algorithms
Local error: it is always a known power of h.
Order of the algorithm: an algorithm has an order p if it is able to correctly integrate a polynomial of order p.
Convergence: an algorithm is convergent if, for h → 0, the global error (accuracy) decreases (under the hypothesis of no rounding errors)
Local error: it is always a known power of h.
Order of the algorithm: an algorithm has an order p if it is able to correctly integrate a polynomial of order p.
Convergence: an algorithm is convergent if, for h → 0, the global error (accuracy) decreases (under the hypothesis of no rounding errors)
1,nn n n
h t y y f y 2
2ny
h
An algorithm of order p has always a local error in the order of o(hp+1)
2''
2h
yn

Examples
1,nn n n
h t y y f y
Forward Euler
0 0.2 0.4 0.6 0.8 11
2
3
4
5
6
7
t
y
h = 0.01h = 0.1h = 0.2
Error at t = 1 (h = 0.01)• Euler:1.72%

Conditioning of the Problem
Definition: a system of ODEs is well conditioned if small error in the function (e.g. parameters) and/or in the initial conditions generate a small error in the solution (without rounding errors!)
Perturbations:
Definition: a system of ODEs is well conditioned if small error in the function (e.g. parameters) and/or in the initial conditions generate a small error in the solution (without rounding errors!)
Perturbations:
Conditioning has nothing to do with the stability of the algorithm
0 0
' , ( )
( ) ( )
t t
t t
y f y
y y

Example of Bad Conditioning
Consider the following ODE:
The general solution is:
If the initial condition is actually y(0) = 1, then:
If the initial condition is instead y(0) = 1.0001, then:
Consider the following ODE:
The general solution is:
If the initial condition is actually y(0) = 1, then:
If the initial condition is instead y(0) = 1.0001, then:
' 9 10
(0) 1
ty y e
y
9( ) t ty t ce e
( ) ty t e
9( ) 0.0001 t ty t e e 0 0.5 1 1.5 2
10-2
100
102
104
t
y
y(0) = 1.0001y(0) = 1

Example of Bad Conditioning
Consider the following ODEs:
They are all characterized by the same solution:
Let’s perturb the initial condition (y(0) = 1.0001):
Consider the following ODEs:
They are all characterized by the same solution:
Let’s perturb the initial condition (y(0) = 1.0001):
' 9 10 (0) 1
' (0) 1
' (0) 1
t
t
y y e y
y e y
y y y
( ) ty t e
9( ) 0.0001
( ) 0.0001
( ) 0.0001
t t
t
t t
y t e e
y t e
y t e e
diverging error
constant error
converging error
If all the eigenvalues of the Jacobian of a system of ODEs
have a positive real part, the system is ill conditioned.
with
' ,ty f y
Re( ( )) 0λ J iik
j
fJ
y

Stability of the Algorithms
Local errorExample: the Forward Euler Method:
The Taylor expansion of y(t):
Subtracting the two expressions gives result:
If we know exactly y in tn:
Local errorExample: the Forward Euler Method:
The Taylor expansion of y(t):
Subtracting the two expressions gives result:
If we know exactly y in tn:
1 ,n n n ny y h f t y
21
2
( ) ( ) ( ) 0.5 ( )
( ) , ( ) 0.5 ( )
n n n n
n n n n
y t y t hy t h y
y t h f t y t h y
21 1( ) ( ) , ( ) , 0.5n n n n n n n ny t y y t y h f t y t f t y h y
21 0.5 ( )L
n nh y

Stability of the Algorithms
Propagation error (always applied to the Forward Euler method)
We don't know exactly the value of y in tn
→ we don't compute the correct value of f(t,y).
Let us apply the mean value theorem to the function f(t,y)
Let us substitute this expression into
Propagation error (always applied to the Forward Euler method)
We don't know exactly the value of y in tn
→ we don't compute the correct value of f(t,y).
Let us apply the mean value theorem to the function f(t,y)
Let us substitute this expression into
( , ( )) ( , )( , )
( )n n n n
n yn n
f t y t f t y df t f
y t y dy
1 1( ) ( ) , ( ) , Ln n n n n n n n ny t y y t y h f t y t f t y
1 1G G Ln y n nh f
Mean value theorem: given a function f(x) and its values at two extremes xa and xb, it exists a point inside the interval [xa, xb] such that:
( ) ( )( )b a
b a
x x
x x
f f f

Local and Global Error
Local error is the amount by which the numerical and exact solutions differs after one step assuming that both were exact at and prior to the beginning of the step

Stability of the Algorithms
Consequences:
1. if fy > 0 (the ODE is bad conditioned) |k| > 1 for h > 0
2. if fy < 0 (the ODE is well conditioned) |k| < 1 for
Consequences:
1. if fy > 0 (the ODE is bad conditioned) |k| > 1 for h > 0
2. if fy < 0 (the ODE is well conditioned) |k| < 1 for
The Forward Euler method is stable only if:
where k is the amplification factor
1 1yhfk
2
y
hf

Example - 1
Let’s consider ODE: 00; yyydt
dy
The Euler method of this ODE: nn yhy 11
The method is stable if 11 k h
hIm
hRe-1
-1
1
-2

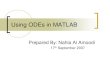
Example - 2
.. Let’s consider ODE: 100;10; yydt
dy
h = 0.001
n tn yn y(n) en
0 0.000 1.00000 1.00000 0.000001 0.001 0.90000 0.90484 0.004842 0.002 0.81000 0.81873 0.008733 0.003 0.72900 0.74082 0.011824 0.004 0.65610 0.67032 0.014225 0.005 0.59049 0.60653 0.016046 0.006 0.53144 0.54881 0.017377 0.007 0.47830 0.49659 0.018298 0.008 0.43047 0.44933 0.018869 0.009 0.38742 0.40657 0.01915
10 0.010 0.34868 0.36788 0.01920
h yn en en / y(n)1E-03 2.6561E-5 1.888E-5 4.1495E-11E-04 4.3171E-5 2.229E-6 4.9090E-21E-05 4.5173E-5 2.266E-7 4.9908E-3
Solution and error at t = 0.1
Local error
en is decreasing linearly with h

Example - 3
Let us integrate the following ODE:
The ODE is well conditioned (fy = -10) and its analytical solution is (y(0) = 1):
For t → ∞, it can be observed that y(t) → 0.
Let us know use the forward Euler method to solve numerically the ODE:
yn → 0 only if:
Let us integrate the following ODE:
The ODE is well conditioned (fy = -10) and its analytical solution is (y(0) = 1):
For t → ∞, it can be observed that y(t) → 0.
Let us know use the forward Euler method to solve numerically the ODE:
yn → 0 only if:
( ) 10y t y
10( ) ty t e
1 ( , ) 1 10n n n n ny y hf t y h y
01 10n
ny h y
1 10 1h 2
0.210
h
or:

Example 3 - Continued
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t
y
Exact Solution
Euler Solution; h = 0.01
0 0.5 1 1.5 2 2.5 3 3.5 4-600
-400
-200
0
200
400
600
800
t
y
Exact solution
Euler solution; h = 0.25

Stability and Precision
When dealing with systems of ODEs, in order to evaluate the stability of the integration method, we must consider the Jacobian of the system (instead of fy).
It is common practice to reduce the problem of stability to the study of the stability of the ODE:
where l is the largest eigenvalue of the Jacobian. Note that the eigenvalues are typically complex.
For instance, for the forward Euler method:
• the method is stable if:
• the local error of the method is:
When dealing with systems of ODEs, in order to evaluate the stability of the integration method, we must consider the Jacobian of the system (instead of fy).
It is common practice to reduce the problem of stability to the study of the stability of the ODE:
where l is the largest eigenvalue of the Jacobian. Note that the eigenvalues are typically complex.
For instance, for the forward Euler method:
• the method is stable if:
• the local error of the method is:
( ) ( )y t y t
22 e
2 2
tL y
h h
1 1yhfk Let us introduce the maximum step in the local error (l < 0):
max max
22eL th

Stiff Systems• Consider IVP:
which has the solution: where a is a large positive number
• Consider IVP:
which has the solution: where a is a large positive number
02 0;0;2 yyttty
dt
dy
20 exp ttyty
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
t
y
inner solutionouter/reduced solutionsolution of the ODE
10 A stiff system is the one involving rapidly changing components together with slowly changing ones. Stiff ODEs have both fast and slow components

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.5
0
0.5
1
1.5
2
2.5
3
3.5x 10
9
t
yEuler; h = 0.1Exact
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t
y
exactEuler; h = 0.001Euler; h = 0.01
Stiff Systems: Euler solution
A problem is stiff in an interval if the step size needed for absolute stability is much smaller than the step size required for accuracy

Backward (Implicit) Euler
21111 ))((
2
1))(()()( nnnn ttcytttytyty
2111 )(
2
1))(,()()( hcytythftyty nnnn
Write down a Taylor expansion for y about tn+1
Evaluate at tn and note y’=f
Drop h2 term to get Euler’s method (backward Euler)
),(),( 111111 nnnnnnnn ythfyyythfyy

Stability Implicit Euler Method.
.
Let’s consider ODE: 00; yyydt
dy
The Implicit Euler method of this ODE: 1
111 ,
nn
nnnn
yhy
ythfyy
h
yy n
n 11
Solution:
1111
1
hor
hStability condition:

Implicit Euler Method: Stability Region
11 h

Backward Euler Forward Euler
Explicit vs. Implicit Methods
),(1 nnnn ythfyy ),( 111 nnnn wthfyy
• Forward Euler is an explicit method. Computing the new approximation yn+1 is simple.
restricted by stability region• Backward Euler is an implicit method. Computing
the new approximation yn+1 can be more complicated; it appears on both sides of the equation and inside the f function.
Larger stability region

Newton Method