Embed Size (px)
Citation preview
PAMM · Proc. Appl. Math. Mech. 9, 277 – 278 (2009) / DOI 10.1002/pamm.200910112
On the modelling of vehicle-road interaction
Heike Vogt∗1 and Wolfgang Seemann1
1 Universität Karlsruhe (TH) - Institut für Technische Mechanik - 76133 Karlsruhe, Germany
During the last years axle loads and demand for transport have been increasing steadily. Although a lot of experimentaldata exists on the corrugation of roads by heavy vehicles, basic investigations concerning vehicle-road interaction are stillnecessary to improve the understanding of the process. Therefore, a simple model is built which will allow for some analyticalreflections. The road exhibits viscoelastic and plastic characteristics whereas the vehicle is approximated as a simple quartercar model. Results of long term simulations are presented.
c© 2009 Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim
1 Modelling
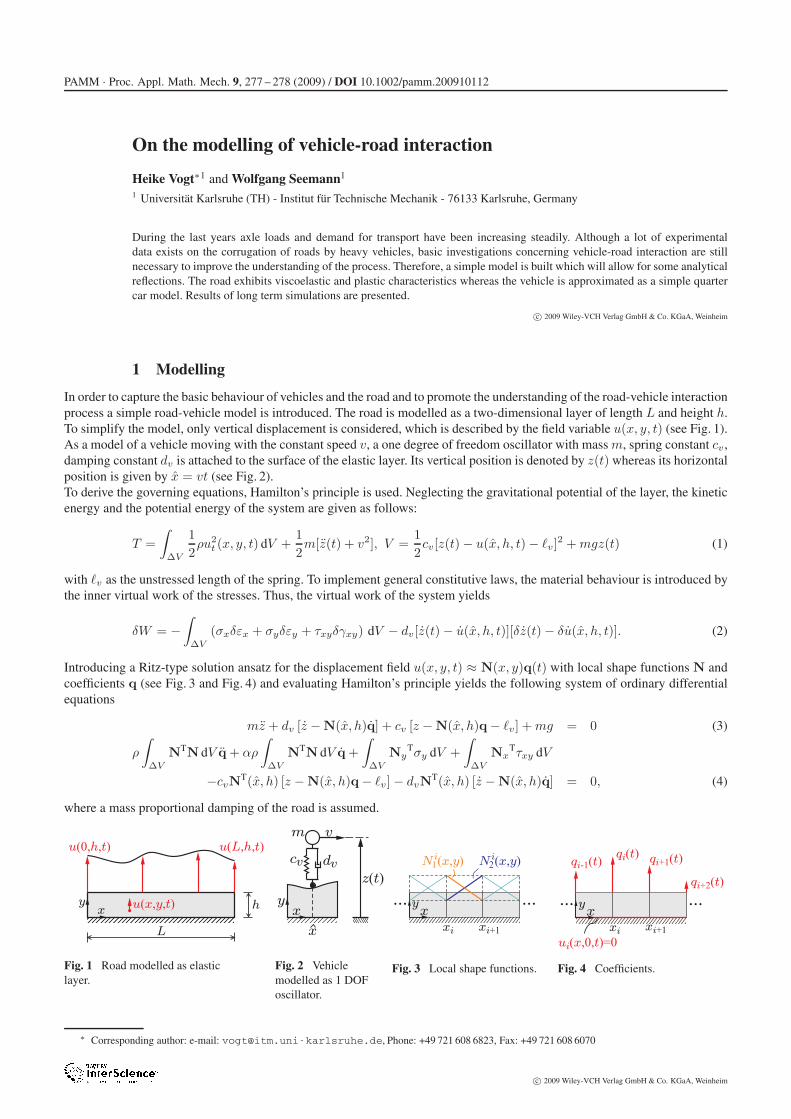
In order to capture the basic behaviour of vehicles and the road and to promote the understanding of the road-vehicle interactionprocess a simple road-vehicle model is introduced. The road is modelled as a two-dimensional layer of length L and height h.To simplify the model, only vertical displacement is considered, which is described by the field variable u(x, y, t) (see Fig. 1).As a model of a vehicle moving with the constant speed v, a one degree of freedom oscillator with mass m, spring constant cv ,damping constant dv is attached to the surface of the elastic layer. Its vertical position is denoted by z(t) whereas its horizontalposition is given by x = vt (see Fig. 2).To derive the governing equations, Hamilton’s principle is used. Neglecting the gravitational potential of the layer, the kineticenergy and the potential energy of the system are given as follows:
T =∫
∆V
12ρu2
t (x, y, t) dV +12m[z(t) + v2], V =
12cv[z(t) − u(x, h, t) − �v]2 + mgz(t) (1)
with �v as the unstressed length of the spring. To implement general constitutive laws, the material behaviour is introduced bythe inner virtual work of the stresses. Thus, the virtual work of the system yields
δW = −∫
∆V
(σxδεx + σyδεy + τxyδγxy) dV − dv[z(t) − u(x, h, t)][δz(t) − δu(x, h, t)]. (2)
Introducing a Ritz-type solution ansatz for the displacement field u(x, y, t) ≈ N(x, y)q(t) with local shape functions N andcoefficients q (see Fig. 3 and Fig. 4) and evaluating Hamilton’s principle yields the following system of ordinary differentialequations
mz + dv [z − N(x, h)q] + cv [z − N(x, h)q− �v] + mg = 0 (3)
ρ
∫∆V
NTN dV q + αρ
∫∆V
NTN dV q +∫
∆V
NyTσy dV +
∫∆V
NxTτxy dV
−cvNT(x, h) [z − N(x, h)q− �v] − dvNT(x, h) [z − N(x, h)q] = 0, (4)
where a mass proportional damping of the road is assumed.
yx
u x y t( , , )
L
h
u L h t( , , )u h t(0, , )
Fig. 1 Road modelled as elasticlayer.
y
z t( )
vm
cv dv
x
x
Fig. 2 Vehiclemodelled as 1 DOFoscillator.
N x yi1( , ) N x yi
2( , )
xi xi+1
... ...yx
Fig. 3 Local shape functions.
xi xi+1
... ...
q ti+1( )qi( )t
q ti+2( )
q ti-1( )
u x ti( ,0, )=0
yx
Fig. 4 Coefficients.
∗ Corresponding author: e-mail: [email protected], Phone: +49 721 608 6823, Fax: +49 721 608 6070
c© 2009 Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim
278 Short Communications 5: Oscillations
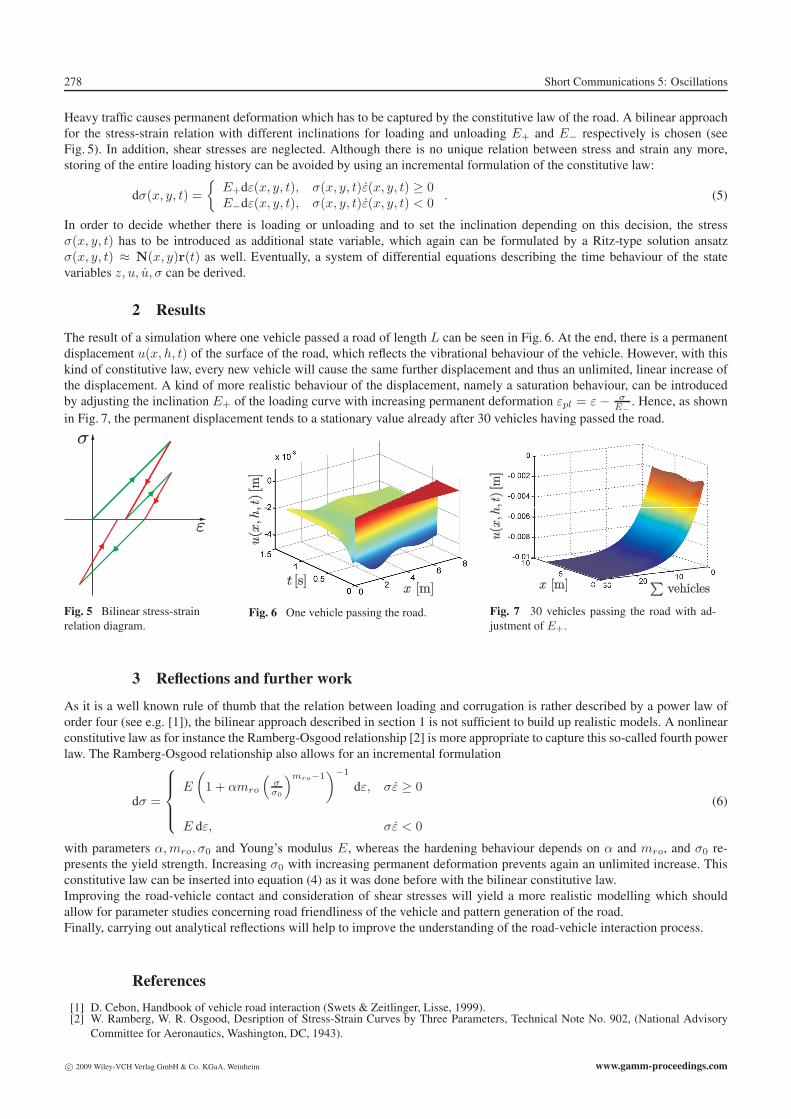
Heavy traffic causes permanent deformation which has to be captured by the constitutive law of the road. A bilinear approachfor the stress-strain relation with different inclinations for loading and unloading E+ and E− respectively is chosen (seeFig. 5). In addition, shear stresses are neglected. Although there is no unique relation between stress and strain any more,storing of the entire loading history can be avoided by using an incremental formulation of the constitutive law:
dσ(x, y, t) ={
E+dε(x, y, t), σ(x, y, t)ε(x, y, t) ≥ 0E−dε(x, y, t), σ(x, y, t)ε(x, y, t) < 0 . (5)
In order to decide whether there is loading or unloading and to set the inclination depending on this decision, the stressσ(x, y, t) has to be introduced as additional state variable, which again can be formulated by a Ritz-type solution ansatzσ(x, y, t) ≈ N(x, y)r(t) as well. Eventually, a system of differential equations describing the time behaviour of the statevariables z, u, u, σ can be derived.
2 Results
The result of a simulation where one vehicle passed a road of length L can be seen in Fig. 6. At the end, there is a permanentdisplacement u(x, h, t) of the surface of the road, which reflects the vibrational behaviour of the vehicle. However, with thiskind of constitutive law, every new vehicle will cause the same further displacement and thus an unlimited, linear increase ofthe displacement. A kind of more realistic behaviour of the displacement, namely a saturation behaviour, can be introducedby adjusting the inclination E+ of the loading curve with increasing permanent deformation εpl = ε − σ
E−. Hence, as shown
in Fig. 7, the permanent displacement tends to a stationary value already after 30 vehicles having passed the road.
Fig. 5 Bilinear stress-strainrelation diagram.
Fig. 6 One vehicle passing the road. Fig. 7 30 vehicles passing the road with ad-justment of E+.
3 Reflections and further work
As it is a well known rule of thumb that the relation between loading and corrugation is rather described by a power law oforder four (see e.g. [1]), the bilinear approach described in section 1 is not sufficient to build up realistic models. A nonlinearconstitutive law as for instance the Ramberg-Osgood relationship [2] is more appropriate to capture this so-called fourth powerlaw. The Ramberg-Osgood relationship also allows for an incremental formulation
dσ =
⎧⎪⎪⎨⎪⎪⎩
E
(1 + αmro
(σσ0
)mro−1)−1
dε, σε ≥ 0
E dε, σε < 0
(6)
with parameters α, mro, σ0 and Young’s modulus E, whereas the hardening behaviour depends on α and mro, and σ0 re-presents the yield strength. Increasing σ0 with increasing permanent deformation prevents again an unlimited increase. Thisconstitutive law can be inserted into equation (4) as it was done before with the bilinear constitutive law.Improving the road-vehicle contact and consideration of shear stresses will yield a more realistic modelling which shouldallow for parameter studies concerning road friendliness of the vehicle and pattern generation of the road.Finally, carrying out analytical reflections will help to improve the understanding of the road-vehicle interaction process.
References
[1] D. Cebon, Handbook of vehicle road interaction (Swets & Zeitlinger, Lisse, 1999).[2] W. Ramberg, W. R. Osgood, Desription of Stress-Strain Curves by Three Parameters, Technical Note No. 902, (National Advisory
Committee for Aeronautics, Washington, DC, 1943).
c© 2009 Wiley-VCH Verlag GmbH & Co. KGaA, Weinheim www.gamm-proceedings.com





























