Embed Size (px)
Citation preview

ON THE MOTIONS OF SUCTION PIPE CONSTRUCTIONS A DYNAMIC ANALYSIS
ir. O.W.J. ten Heggeler1, ir. P.M. Vercruijsse1, dr. ir. S.A. Miedema2 Abstract: With the introduction of jumbo trailing suction hopper dredgers and the development of deep sea dredging equipment came suction pipe constructions and gantries of ever increasing dimensions. The implementation of submerged dredge pumps and the application of longer and greater number of pipe sections of large diameter resulted in suction pipe constructions which distinguish themselves from traditional constructions by their bigger mass and deviating mass distribution. Given the fact that these characteristics have changed significantly and are features that determine the dynamic motion behaviour of a suction pipe construction, one enters a new field concerning the dynamic behaviour of these constructions. This paper describes a mathematical model, developed at IHC Holland’s R&D institute MTI Holland in co-operation with Delft University of Technology. With this mathematical model one can perform calculations in the frequency domain to determine the eigenvalues and eigenvectors of an arbitrary suction pipe construction during the hoisting or lowering operation above the water line. These eigenvalues and eigenvectors determine the dynamic motion behaviour of the suction pipe construction. By implementing the motions of the vessel into the model it was furthermore made possible to determine the motion behaviour of suction pipe constructions while working in offshore conditions. The probability of the draghead and gimbal joint colliding with the hopper dredger’s hull in a certain seastate can be calculated as well as the occurring collision speeds. This knowledge can be used to evaluate performance and operating limits of dredging equipment working in offshore conditions. With the mathematical model a tool is developed to analyse the dynamic behaviour of existing suction pipe constructions or suction pipes which are still in an early stage of the design phase. Keywords: trailing suction hopper dredger, suction pipe, dynamics, hoisting/lowering operation, operation limits, design tool 1 IHC Holland NV MTI Holland BV Smitweg 6, 2961 AW Kinderdijk The Netherlands Tel.: +31-(0)78-6910342 Fax: +31-(0)78-6910331 E-mail: [email protected] E-mail: [email protected] 2 Delft University of Technology Faculty of Mechanical Engineering and Marine Technology Section of Dredging Technology Mekelweg 2, 2628 CD Delft The Netherlands Tel.: +31-(0)15-2786529 Fax: +31-(0)15-2781397 E-mail: [email protected]
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

NOMENCLATURE Symbols A0 orientation angle [rad] b length trunnion elbow [m] Ci coefficient [-] d cable length [m] g gravitational acceleration [m/s2] H wave height [m] Hs significant wave height [m] kij stiffness matrix coefficient [N· m] K stiffness matrix [N· m] l length [m] L length pipe section [m] m mass [kg] mij mass matrix coefficient [kg· m2] M mass matrix [kg· m2] P probability [-] s distance between hoisting point and hinge [m] Sζ spectral density [m2s] R length [m] t time [s] T natural or eigenperiod [s] T kinetic energy [N· m] T wave period [N· m] Tp peak frequency [N· m] v velocity [m/s] V potential energy [N· m] V sailing speed [kn] x surge [m] y sway [m] yi displacement in y direction [m] ya displacement amplitude in y direction [m] z heave [m] εφζ roll phase angle [rad] φ roll angle [rad] φ angle in vertical plane [rad] φa roll amplitude [rad] γ phase angle [-] µ wave direction [°] θ pitch angle [rad] θ angle in vertical plane [rad] ω eigenfrequentie [rad/s] ω radial frequency [rad/s] ωe wave frequency [rad/s] ωn wave frequency [rad/s] ψ yaw angle [rad] ψ angle in horizontal plane [rad] ψA swing amplitude [rad] ζ wave elevation [m] ζa wave amplitude [m] ζan wave amplitude [m] Abbreviations cog centre of gravity RAO Response Amplitude Operator
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema
1. INTRODUCTION Over the years dredging industry witnessed an enormous increase of scale. Especially at the closing of the century marine engineering projects have been realised of unimaginable scale. Land reclamation projects in South East Asia particularly in Hong Kong, and recently Singapore are good examples of this development, where hundreds of millions of cubic meters of dredged material were involved. This increasing demand for enormous amounts of sand for major infrastructual projects have resulted in a rapid expansion in size of the hopper dredger. Longer sailing distances justified the huge investment costs of larger trailing suction hopper dredgers which resulted in the introduction of the Jumbo trailing suction hopper dredger some ten years ago. The growth in hopper capacity still continues today. In the last decade, the maximum hopper capacity more than doubled, well exceeding the 20.000 m2 nowadays (see table 1). In the mean time dredging depths increased as well, as more material was needed and one ran out of easy accessible places (see table 1). Dredging depths now reach more than 100m as demonstrated in recent projects in Taiwan and near Newfoundland, Canada Table 1 Overview of the 13 largest trailing suction hopper dredgers
Name Capacity [m3]
Depth [m]1)
2) Owner Built
1 Rotterdam 21.500 40/60 n3) Ballast Nedam Dredging, the Netherlands 2001 2 HAM 318 23.700 55/70 y HAM Dredging, the Netherlands 2001 3 Vasco da Gama 33.000 45/131 n3) Jan de Nul, Belgium 2000 4 Nile River 17.000 40/60 n DEME, Belgium 2000 5 Queen of Penta Ocean 20.000 35/60 y Penta Ocean, Japan 1999 6 Volvox Terranova 20.000 40/105 y AZC van Oord, the Netherlands 1999 7 Queen of the Netherlands 23.425 35/120 y Boskalis, the Netherlands 1998 8 Fairway 23.425 35/120 n Boskalis, the Netherlands 1997 9 Amsterdam 18.000 50/75 y Ballast Nedam Dredging, the Netherlands 1996
10 Gerardus Mercator 18.000 30/102 y DEME, Belgium 1996 11 Pearl River 17.000 40/60 n DEME, Belgium 1994 12 JFJ de Nul 11.750 45/75 y Jan de Nul, Belgium 1992 13 Vlaanderen XVIII 11.300 30 n DEME, Belgium 1970
1) Standard/maximum 2) Submerged dredgepump 3) Optional Not only the dredging vessels became bigger, the dredging equipment onboard the hopperdredgers changed accordingly. Suction pipe diameters increased, suction pipes became longer, hydraulics were installed and the total amount of available power grew. Deviating constructions as four-armpieces were introduced as well as submerged dredgepumps and extra jet water to assist the excavation process. As the size and total weight of the construction grew, consequently gantries had to become higher and stronger and pulley blocks had to be used to support the suction pipe’s. Given the fact that all these changed features determine the dynamic motion behaviour of suction pipe constructions, one enters a new field concerning the dynamic behaviour of these constructions. One of the situations of interest concerning the dynamic behaviour of the suction pipe is the hoisting/lowering operation above the waterline. With an empty vessel and winch speeds of around 10 m/min this situation normally lasts for about 1 or 2 minutes. During this situation the suction pipe is free to swing under the influence of the ships movements, as damping is hardly present in the pipe’s construction. Problems may arise, limiting the operation of the equipment. This was reason for IHC Holland’s R&D institute MTI Holland, in co-operation with Delft University of Technology, to examine the dynamic behaviour of a suction pipe during lift/lowering operation. This resulted in a mathematical model of the suction pipe describing the dynamics of the constrution (ten Heggeler 2000).
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

2. EQUATION OF MOTION As a basis for the mathematical modelling of trailing suction pipe installations use was made of the theory for a single pendulum (see in figure 1) as the construction of a suction pipe shows many similarities with a common pendulum. A closer look at a suction pipe (consisting of two pipe sections) shows two interconnected pendulae which are attached to the hopper dredger’s hull. For a pendulum, as for every mechanism, holds that the total amount of energy within the system is constant. In other words: the sum of the kinetic energy T and potential energy V is constant:
==θθ−−⋅⋅⋅⋅⋅⋅++θθ⋅⋅⋅⋅⋅⋅==++ )cos1(gmm21VT 22
l&l constant or (1)
0gmmVT 2 ==θθ⋅⋅⋅⋅⋅⋅++θθ⋅⋅⋅⋅==++ l&&l&& (2)
y
x
θ
g
m
l
Figure 1 Single pendulum
In mechanics the latter equation is referred to as the equation of motion, which is often printed in the following format:
0KM ==θθ⋅⋅++θθ⋅⋅ && (3) In which M is the mass matrix and K is the spring or stiffness coefficient matrix. From equation 3 one finds one of the best known expressions in this world, i.e.; the expression for the natural frequency ω and natural period T of a pendulum:
0VT 2 ==θθ⋅⋅ωω++θθ==++ &&&& (4)
l
gMK2 ====ωω and
g2
2T
l⋅⋅ππ⋅⋅==
ωω
ππ⋅⋅== (5)
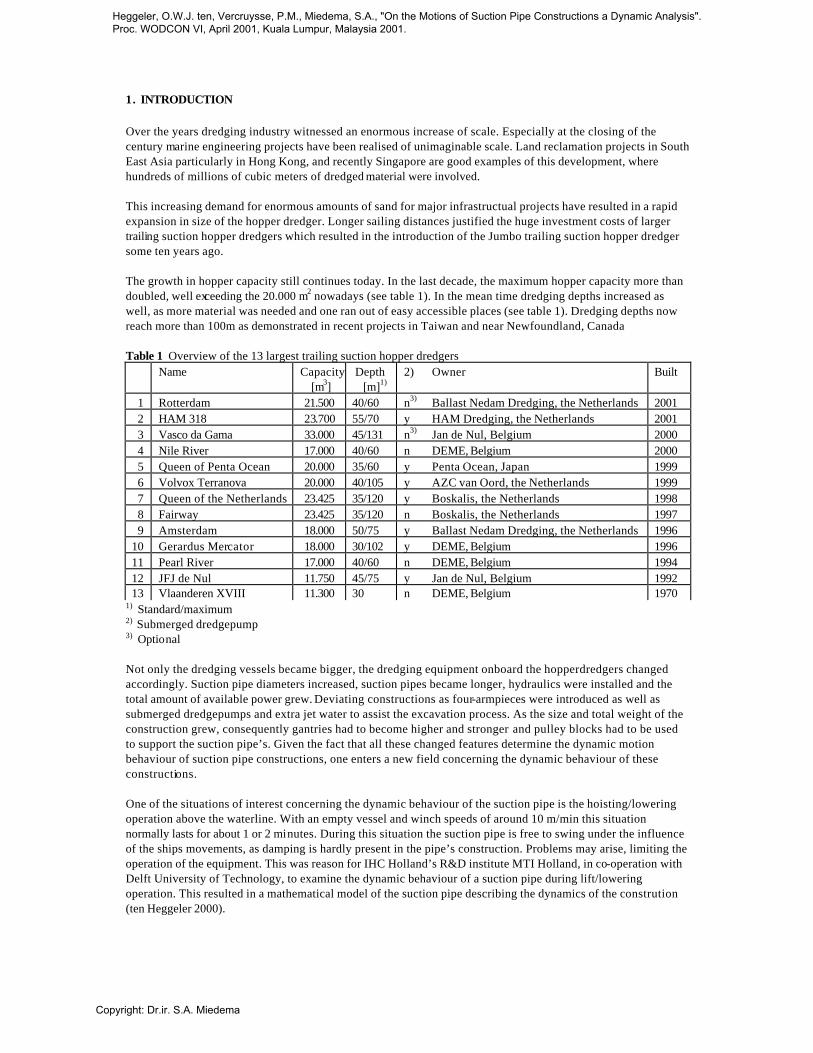
The number of natural, or eigenfrequencies, for a mechanism equals the number of degrees of freedom. The pendulum shown in figure 1 for instance has one degree of freedom, i.e.; θ, therefore one will find only one eigenperiod given in equation 5. Figure 2 gives a sketch of a typical suction pipe. At first glance the trailing suction pipe installation shown has four degrees of freedom, i.e. φ1, φ2, ψ1 and ψ2. However as ψ1 is a function of φ1 and ψ2 is a function of φ1 and φ2, the system has not four but just two degrees of freedom. For the mathematical modelling of the suction pipe installation one can therefore use the equation of motion for a double pendulum, see figure 3. The basic theory for the determination of the two natural frequencies and periods for this double pendulum is similar to the theory for the single pendulum and well documented in handbooks for engineers (Reynen 1993). For this reason the derivation of the eigenfrequencies and periods of the double pendulum are not printed here in this article.
φ2
ψ2
d2
L2
L1
d1b
g
φ1
y 1
xy
z
hull
Lower pipe
Trunnion elbow
Upper pipe
Draghead
Gimbal joint
Figure 2 Trailing suction pipe installation
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema
y
x
θ1
θ2
g
m1
m2
l1
l2
Figure 3 Double pendulum
The equations of motion for a typical suction pipe construction in matrix form become:
0kk
kk
mm
mmKM
2
1
2221
1211
2
1
2221
1211 ==
ψψ
ψψ⋅⋅++
ψψ
ψψ⋅⋅==ψψ⋅⋅++ψψ⋅⋅
&&
&&&& (6)
The two eigenvalues of this homogeneous equation represent the eigenfrequencies of the system. The eigenfrequencies and eigenperiods can be derived as follows:
1
2
2
2
1 MK −−⋅⋅==
ωω
ωω and
ωωππ⋅⋅
ωωππ⋅⋅==
2
1
2
1
/2
/2
T
T (7)
With each eigenfrequency comes a accompanying eigenvector which represents the swingform which belongs to this eigenfrequency. The eigenfrequencies and so-called eigen-swingforms are characteristic for a certain suction pipe construction.
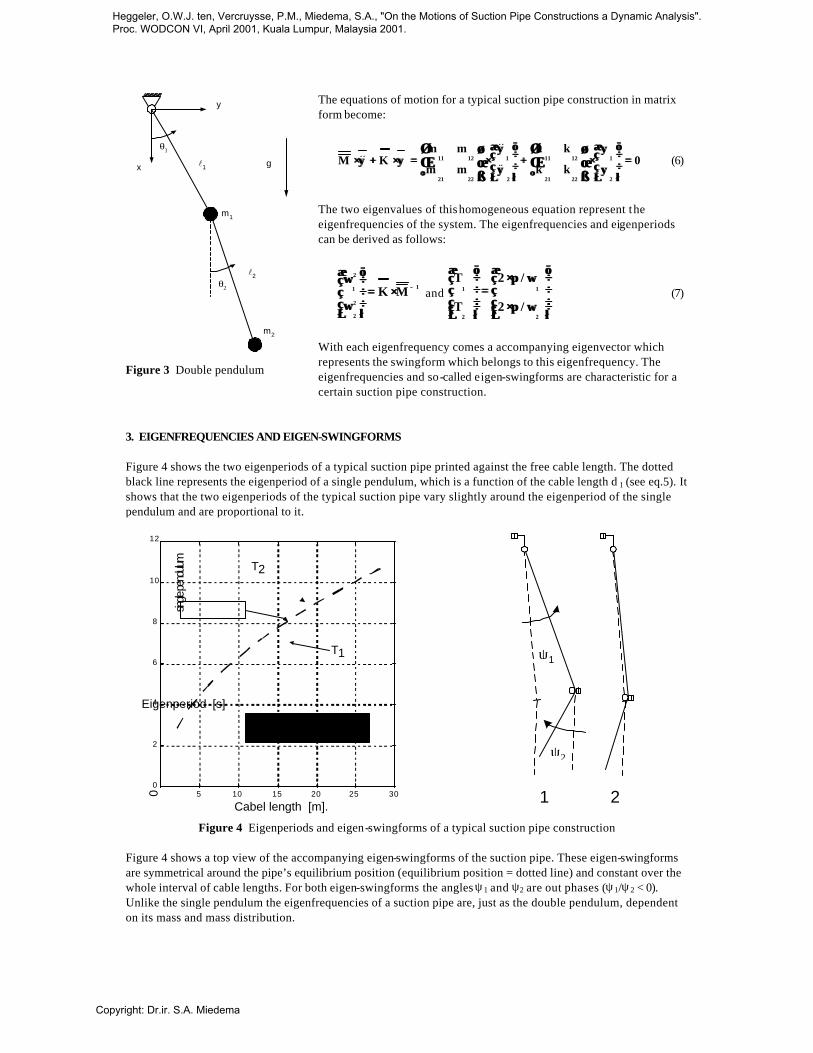
3. EIGENFREQUENCIES AND EIGEN-SWINGFORMS Figure 4 shows the two eigenperiods of a typical suction pipe printed against the free cable length. The dotted black line represents the eigenperiod of a single pendulum, which is a function of the cable length d 1 (see eq.5). It shows that the two eigenperiods of the typical suction pipe vary slightly around the eigenperiod of the single pendulum and are proportional to it.
Cabel length [m].
Eigenperiod [s]
single
pend
ulum
0 5 10 15 20 25 300
2
4
6
8
10
12
= T1 and T2 typical suction pipe
T1
T2
1 2
ψ2
ψ1
Figure 4 Eigenperiods and eigen-swingforms of a typical suction pipe construction Figure 4 shows a top view of the accompanying eigen-swingforms of the suction pipe. These eigen-swingforms are symmetrical around the pipe’s equilibrium position (equilibrium position = dotted line) and constant over the whole interval of cable lengths. For both eigen-swingforms the angles ψ1 and ψ2 are out phases (ψ1/ψ2 < 0). Unlike the single pendulum the eigenfrequencies of a suction pipe are, just as the double pendulum, dependent on its mass and mass distribution.
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

Both eigenfrequencies and eigen-swingforms calculated with the mathematical model have been verified with the use of a multi body dynamics programme. In practice the calculated swingforms have been recognised. 4. EXCITATION The suction pipe is excited by the motions of the dredging vessel. The several gantries and the suction inlet support the suction pipe construction and transfer the ships motions to the suction pipe. The ship itself is excited by periodic loads due to ocean surface waves. The ships motion’s can be defined by three translations of the centre of gravity (cog), surge x, sway y and heave z and three rotations around cog, roll φ pitch θ and yaw ψ. Using superposition one can calculate the motions in any point on the ship (Journée 1999).
Y
Z
g
m
l
θ
φ
R
A0
c o g
G a n t r y
Figure 5 Single pendulum on a rolling ship
Figure 5 illustrates a single pendulum supported by a gantry onboard a rolling ship. The roll response of a ship to a regular harmonic wave is given by:
εε++⋅⋅ωω⋅⋅φφ==φφ
φ ζφ ζtcos
ea (8)
with the harmonic wave elevation ζ given by:
⋅⋅ωω⋅⋅ζζ==ζζ tcos
ea (9)
Assuming small angles of rotation, the equation of motion of the pendulum onboard a rolling ship is:
ll&& a
2
e0
e
2AcosR
F,g
:withtcosFφφ⋅⋅ωω⋅⋅
⋅⋅
====ωω
εε++⋅⋅ωω⋅⋅==θθ⋅⋅ωω++θθ
φ ζφ ζ (10)
The left side of this equation is equal to equation 4. On the right side of the equal sign appears a force term dependent on the motion of the top of the gantry caused by the rolling of the ship (Glansdorp and Remery 1965). As all six degree’s of freedom of a ship are involved in the motion of a suction pipe. Assuming small angles of rotation one finds an equation of motion for a typical suction pipe that has the following format:
⋅⋅++⋅⋅
⋅⋅++⋅⋅
⋅⋅ωω
⋅⋅ωω
⋅⋅ωω
⋅⋅ωω==
ψψ
ψψ⋅⋅++
ψψ
ψψ⋅⋅
tt
tt
kk
kk
mm
mm
e4e3
e2e1
2
1
2221
1211
2
1
2221
1211
cosCsinC
cosCsinC
&&
&& (11)
Different models were derived depending on the on the hinging connection between the pipe sections. A four-armpiece instead of a gimbal joint results in different matrix coefficients. Also the orientation of the four-armpiece is an important role. Coefficients C1 till C4 depend on the position of the gantries and suction inlet with respect to the vessel’s centre of gravity (cog). These constants also depend on the ship’s motions in the six degree’s of freedom due to a regular wave. The particular solution of equation 11 is know as the steady state solution and is of most interest. The particular solution (see equation 12) can be found using the Laplace transformation.
(( )) (( ))
γγ++⋅⋅ωω⋅⋅ψψ==ψψ
γγ++⋅⋅ωω⋅⋅ψψ==ψψ2eA221eA1
tsintandtsint 1 (12)
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

The behaviour of the suction pipe is linear. This means that at each wave frequency the ratio between the pipe’s motion amplitudes and the wave amplitudes and also the phase shifts between the motions and the waves are constant. As a consequence of the linear theory, the resulting motions of the pipe in irregular waves can be obtained by adding together results from regular waves of different amplitudes, frequencies and possible propagation directions of the waves. 5. APPLICATIONS OF THE MODEL With the solution of equation 11 the movement of any point on the suction pipe due to a regular wave or a summation of regular waves can be calculated. Now this is possible one is interested in determining the limits to the hoisting/lowering operation of a suction pipe in terms of seastate and orientation of a hopper dredger in a wave field. To do so one should be able to calculate the chance of a collision between a swinging suction pipe and the hopper dredger and the accompanying collision speeds. Furthermore one is interested in the influence of the various design parameters on the swinging behaviour of a suction pipe and of course the possibilities to affect this behaviour. 5.1 Collision chance Frequency characteristics In order to calculate any collision chance the so-called frequency characteristics of a suction pipe should be determined. These characteristics exist of the transfer functions (also called response amplitude operators, RAO’s) and the phase shifts. The transfer functions are the ratio between the suction pipe motion amplitudes and the wave amplitude and follow just as the phase shifts from the particular solution. The largest motion amplitudes occur at the end of the pipe sections, at the gimbal joint and the draghead. As these points are the first to collide into a hopper dredger’s side they are of most interest. Figure 6 gives transfer functions and phase shifts of the gimbal joint and the draghead of a typical suction pipe.
Wave frequency [rad/s]0 0.5 1 1.5 2 2.5
Transfer functionEmpty vesselSpeed v = 0 knCable length d1 = 10 mWave direction µ= 60°--------- = Gimbal joint-- -- -- = Draghead
0
1
2
3
4
5
6
7
8
9
10
swin
g am
plitu
de/w
ave
ampl
itude
[m/m
]
-180
-150
-120
-90
-60
-30
0
30
60
90
120
150
180
Pha
se a
ngle
[°]
0 0.5 1 1.5 2 2.5
Wave frequency [rad/s]
Cable length d 1 = 10 m
* = Gimbal joint
o = Draghead
Figure 6 The frequency characteristics of a typical suction pipe These frequency characteristics apply only to a certain load case and speed of the hopper dredger and to a certain cable length d1 and wave direction µ. For wave frequencies equal to the eigenfrequency of the suction pipe, resonance occurs. In that case the amplitude ratios approach infinity as can be seen in figure 6. In practice of course the amplitudes of the suction pipe are limited. For wave frequencies slightly lower or higher than the eigenfrequencies the amplitude ratios decline rapidly. Besides the two peaks at the eigenfrequencies of the pipe, a third peak (ω = 0,81 rad/s) can be found in the transfer function. This one is especially distinct in a beam wave situation (µ = 90° or 270°). This peak is caused by the roll eigenfrequency of the vessel. As the cable length of the suction pipe is not constant the resonance occurs at lower frequencies when the cable length increases. In the situation that the eigenfrequencies of the suction pipe are equal to the roll eigenfrequency of the vessel, one wide peak appears in the transfer function. In this situation the cable lengths is well above 10 m. Normally the suction pipe reached the waterline by then so the motions of the pipe are damped by the water.
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

The motions of the of the suction pipe are, among others, dependent on the incoming wave direction µ. Extreme motions of a pipe happen when the hopper dredger is in beam waves. In theory when a ship is in following or head waves no motion transition occurs to suction pipe. However, in practice, due to wave spreading there will always be some motion transition to the pipe. Energy spectra To determine the dynamic behaviour of a suction pipe in an irregular sea it is necessary to describe the condition of the sea. This is done with the use of wave energy spectra. A wave energy spectrum gives the spectral density Sζ as a function of the wave frequency ωe. This spectral density is in fact the average energy per unit area of waves of which the frequencies lie between ωn and ωn+ ∆ω (Journée 1999) (see figure 7).
Sζ (ω)
ω
Sζ (ωn)
wn wn+ d ω
d ω
Figure 7 Definition of spectral density
In equation form the spectral density is equal to:
2
ann 21S ζζ⋅⋅==ωω∆∆⋅⋅
ωω
ζζ (13)
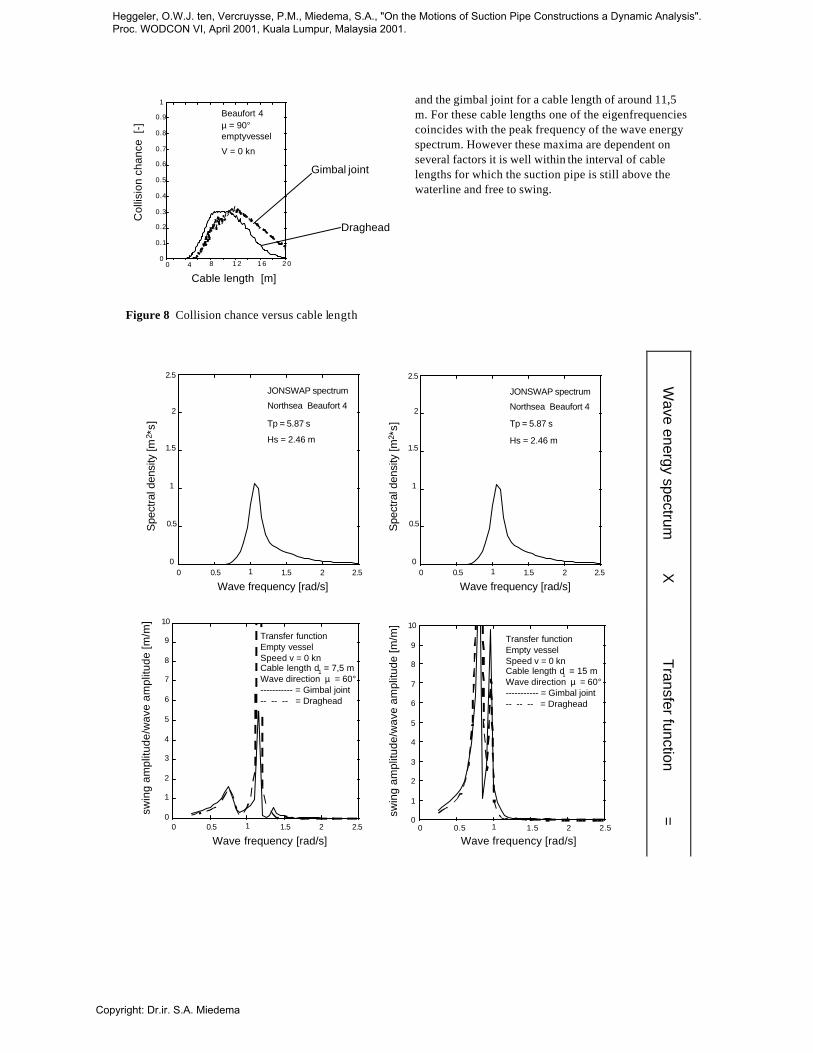
These spectra can be determined from measured wave elevation records. In literature several mathematical formulations for wave spectra are found. Most of them are based on a certain significant wave height H and its period T. An example of these so-called standard wave spectra are the JONSWAP spectra (Joint North Sea Wave Project) for the North Sea. At the top of figure 9 a JONSWAP spectrum is given for windscale Beaufort 4.
With the transfer functions between wave motion and the pipe’s response motion one can transform any wave energy spectrum to a corresponding motion energy spectrum:
(( )) (( )) (( ))ωω⋅⋅ωωζζ
==ωωζζ
Sy
S
2
a
a
y (14)
Figure 9 shows the construction of the motion energy spectra of the draghead and gimbal joint of a typical suction pipe for cable length d 1 = 7,5 (left) and 15 m (right) in Beaufort 4 and wave direction of µ = 60° Chance calculation As the instantaneous wave elevation has a Gaussian distribution relationship with statistics can be found from computing the area under the motion spectrum m0y . Expressed in terms of m0y the probability P that a motion amplitude of the suction pipe ya exceeds a certain threshold value, a, is given by:
⋅⋅−−==>>
y0
2
m2a
exp}ay{P a (14)
The chance that a draghead or gimbal joint collides with the hull of the hopper dredger is exactly a half times the chance P of the draghead or gimbal joint exceeding the distance between the draghead respectively gimbal joint and the hull of the hopper dredger. Figure 8 gives the collision chance of the draghead and the gimbal joint of a typical suction pipe with the hopper dredger in a beam wave situation, Beaufort 4. It shows that the collision chance of the draghead has a maximum for a cable length of 8,5 m
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema
4 8 1 2 1 6 2 00
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Beaufort 4µ = 90°empty vessel
V = 0 kn
Cable length [m]
Col
lisio
n ch
ance
[-]
0
Draghead
Gimbal joint
Figure 8 Collision chance versus cable length
and the gimbal joint for a cable length of around 11,5 m. For these cable lengths one of the eigenfrequencies coincides with the peak frequency of the wave energy spectrum. However these maxima are dependent on several factors it is well within the interval of cable lengths for which the suction pipe is still above the waterline and free to swing.
0 0.5 1 1.5 2 2.50
0.5
1
1.5
2
2.5
Wave frequency [rad/s]
Spe
ctra
l den
sity
[m2 *
s]
JONSWAP spectrum
Northsea Beaufort 4
Tp = 5.87 s
Hs = 2.46 m
0 0.5 1 1.5 2 2.50
0.5
1
1.5
2
2.5
Wave frequency [rad/s]
Spe
ctra
l den
sity
[m2 *
s]JONSWAP spectrum
Northsea Beaufort 4
Tp = 5.87 s
Hs = 2.46 m
Wave energy spectrum
X
0
1
2
3
4
5
6
7
8
9
10
swin
g am
plitu
de/w
ave
ampl
itude
[m/m
]
Transfer functionEmpty vesselSpeed v = 0 knCable length d1 = 7,5 mWave direction µ = 60°----------- = Gimbal joint-- -- -- = Draghead
Wave frequency [rad/s]0 0.5 1 1.5 2 2.5
Transfer functionEmpty vesselSpeed v = 0 knCable length d1 = 15 mWave direction µ = 60°----------- = Gimbal joint-- -- -- = Draghead
0 0.5 1 1.5 2 2.5
swin
g am
plitu
de/w
ave
ampl
itude
[m/m
]
0
1
2
3
4
5
6
7
8
9
10
Wave frequency [rad/s]
Transfer function =
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema
Spe
ctra
l den
sity
[m2 *
s]
Wave frequency [rad/s]
0
1
2
3
4
5
6
7
8
9
10
0 0.5 1 1.5 2 2.5
Energy spectrumEmpty vesselSpeed v = 0 knCable length d1 = 7,5 mWave direction µ = 60°----------- = Gimbal joint-- -- -- = Draghead
Spe
ctra
l den
sity
[m2 *
s]
Wave frequency [rad/s]0 0.5 1 1.5 2 2.5
0
1
2
3
4
5
6
7
8
9
10
Energy spectrumEmpty vesselSpeed v = 0 knCable length d1 = 15 mWave direction µ = 60°----------- = Gimbal joint-- -- -- = Draghead
Mo
ti
on
en
er
gy
sp
ec
tr
um
Figure 9 Construction of the motion energy spectra of a typical suction pipe for a cable lengths f d1 = 7,5 and 15 m and incoming wave direction of µ = 60°
5.2 Collision speed Besides collision chances the occurring collision speeds are important as well. They are necessary to determine the possible consequences of a collision or for example to determine the characteristic of a hydraulic buffer to prevent a suction pipe from damaging a hopper dredger’s hull or gantry (see figure 10). Collision speeds can be calculated by differentiation of the particular solution found in equation 12.
Location hydrolic buffer
Saddle
GantrySuction pipe
Figure 10 Buffer at the b ase of a gantry
0 1 2 3 4 5 6 7 8-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Time [s]
Dis
tanc
e be
twee
n su
ctio
n pi
pe a
nd h
ull
[m]
Empty vesselSpeed v = 0 knWave frequency We = 1,05 rad/sWave height H = 2 mWave direction µ = 270°------ = ys1 -- -- -- = ys2
t = 3,5 sec.
Figure 11 Distance between the upper and lower pipe and there supporting gantries
Figure 10 illustrates a suction pipe onboard a hopper dredger. Imagine that at t = 0 sec the suction pipe is lifted from its saddles and starts swinging due to the movement of the hopper dredger caused by a wave with a frequency of ω = 1,05 rad/s and a wave height H = 2 m. Figure 11 shows the distances, ys1(t) and ys2(t), between the upper and lower pipe and their supporting gantries. It shows that the suction pipe initially moves away from the gantries. After t = 3,5 sec however the upper pipe first hits a gantry. The collision speed v y s1(3,5) equals 0,98 m/s in this specific situation. Of course the worst case scenario will be normative for the choice of a buffer. 5.3 Design parameters The eigenfrequencies and eigen-swingforms are features that are specific for a particular suction pipe. These features depend on various design parameters and can be affected by changes in these design parameters. As the model is analytical it can be used for studying the influence of the various design parameters on the dynamic
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema
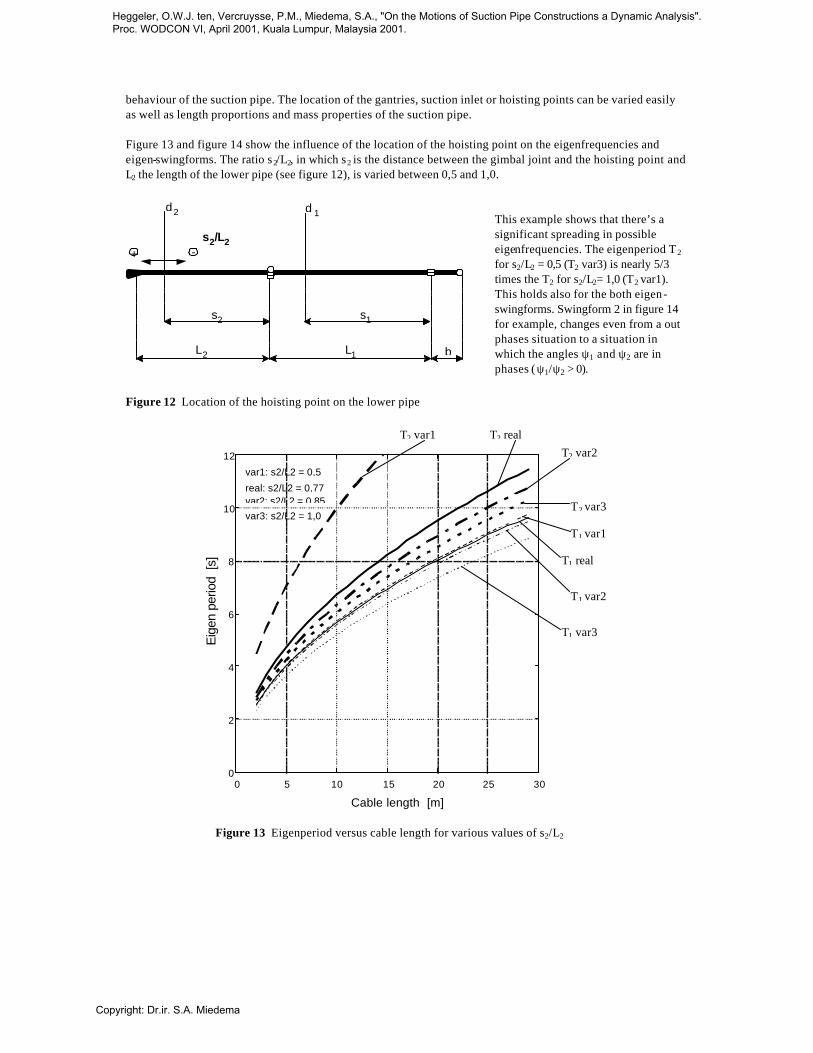
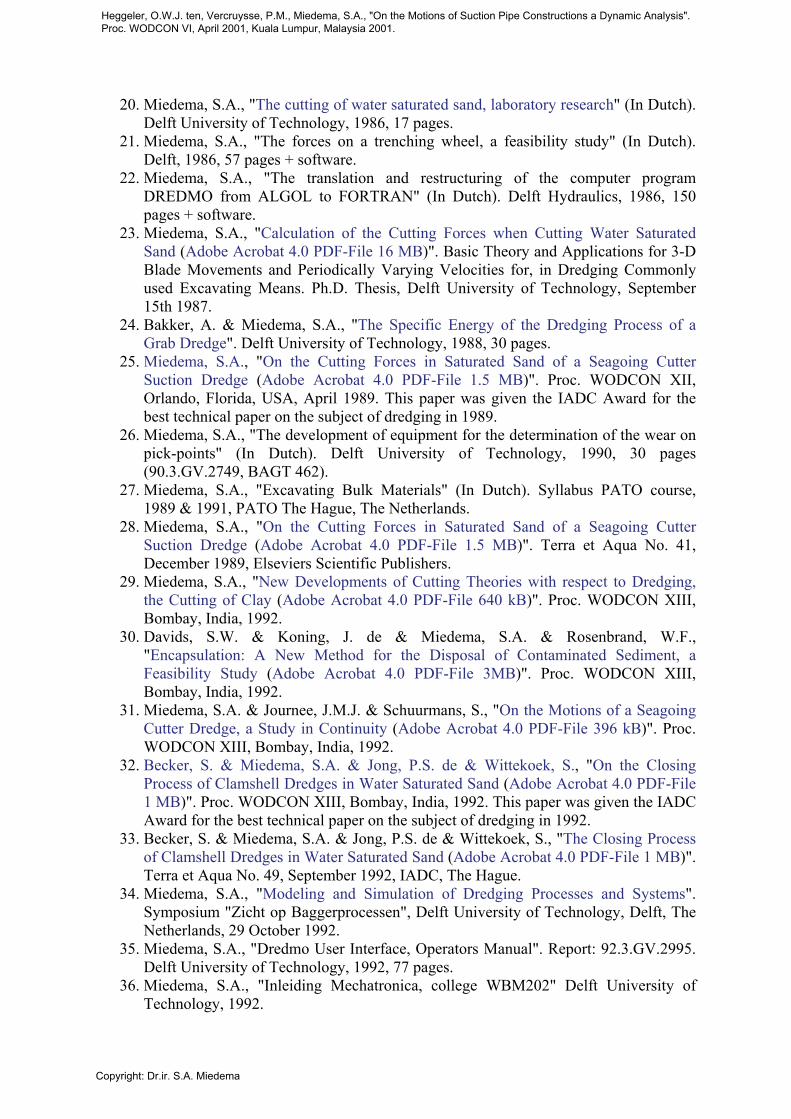
behaviour of the suction pipe. The location of the gantries, suction inlet or hoisting points can be varied easily as well as length proportions and mass properties of the suction pipe. Figure 13 and figure 14 show the influence of the location of the hoisting point on the eigenfrequencies and eigen-swingforms. The ratio s2/L2, in which s2 is the distance between the gimbal joint and the hoisting point and L2 the length of the lower pipe (see figure 12), is varied between 0,5 and 1,0.
s1s2
L1L2 b
d 1
-+
d2
s2/L2
Figure 12 Location of the hoisting point on the lower pipe
This example shows that there’s a significant spreading in possible eigenfrequencies. The eigenperiod T 2 for s2/L2 = 0,5 (T2 var3) is nearly 5/3 times the T2 for s2/L2= 1,0 (T2 var1). This holds also for the both eigen-swingforms. Swingform 2 in figure 14 for example, changes even from a out phases situation to a situation in which the angles ψ1 and ψ2 are in phases (ψ1/ψ2 > 0).
E
igen
per
iod
[s]
0 5 10 15 20 25 300
2
4
6
8
10
12
Cable length [m]
var1: s2/L2 = 0,5
real: s2/L2 = 0,77var2: s2/L2 = 0,85var3: s2/L2 = 1,0
T2 var1 T2 real
T2 var3
T2 var2
T1 real
T1 var1
T1 var2
T1 var3
Figure 13 Eigenperiod versus cable length for various values of s2/L2
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

VAR 1 REAL VAR 2 VAR 3EIGEN-SWINGFORM 1
VAR 1 REAL VAR 2 VAR 3EIGEN-SWINGFORM 2
Figure 14 Eigen-swingforms for various values s 2/L2 Extensive analysis showed that changes in mass and mass distribution have just little influence on the eigenperiods and eigen-swingforms. This clearly indicates the relation between the suction pipe and a single pendulum. In the contra ry to changes in mass properties, the location of the hoisting points have, as shown in figure 13 and 14, a major influence on the eigenperiods and eigen-swingforms of a suction pipe. The ratio between the length of the upper pipe and the length of the lower pipe, or in other words the location of the gimbal joint, has no influence on the dynamic properties at all. The difference in height between separate gantries have a special effect on the course of the eigenperiods as the two eigenperiods approach one another and cause rapid changes in swingforms. Another consequence is that the course of the eigenperiods are no longer proportional to the eigenperiod of a single pendulum. 6. CONCLUSIONS As shown above, with the mathematical model one can easily perform calculations in the frequency domain to determine the eigenvalues and eigenvectors of an arbitrary suction pipe construction. Collision chances can be calculated as well as collision speeds in any seastate and wave direction. This provides a tool for analysing the dynamic behaviour of both existing suction pipe constructions as suction pipes that are still in the design phase. From the results of he parameter study can be concluded that a scaling of the size of the suction pipe it self has no or little influence on the eigenperiods and eigen-swingforrms. Longer and heavier suction pipes constructions have nearly the same dynamic properties as smaller and less heavy suction pipes, as long as the ratios s1/L1 and s2/L2 (see figure 12) remain the same. The use of a submerged dredgepump in upper or lower pipe or extreme heavy dragheads have no significant influence either. However as a consequence of larger and heavier suction pipe constructions gantries become higher. Together with the increase in hopper size this means that the distance to be bridged between waterline and the top of the gantry increased considerably. In case of a constant winch speed the suction pipe is excited for a longer period of time before the motions of the suction pipe are damped by the water. Another consequence of the increased distance between the top of the gantry and the waterline is that the interval of eigenfrequencies changed. The maximum cable length grew which results in lower eigenfrequencies of the system. In general these lower eigenfrequencies correspond better with the peak frequencies of wave energy spectra of higher Beaufort wind scales, so resonance behaviour is more likely to happen. A higher Beaufort windscale means more wave energy and therefore more motion transition to the suction pipe resulting in a higher risks at collisions between suction pipe and the hopper’s side.
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

One of the possibilities to affect the dynamic behaviour of the suction pipe construction, as mentioned above, is to shift the hoisting points. One can influence the eigenperiods as well as eigen-swingforms. Eigenperiods determine the frequencies at which resonance occurs and the eigen-swingforms qualify whether the draghead or gimbal joint has a higher chance on a collision with the hopper dredger’s hull. Besides the hoisting points a different construction of the hinging connection between the separate pipe sections can be used to change the dynamic behaviour as well. Other considerations are gantry types that reduce the maximum distance between gantry top and the waterline or one can simple increase the available winch power shortening the available time to build up a significant swing motion. A more complex solution may be to introduce damping in the suction pipe’s construction but so far there’s no practical implementation known to do so. Besides all these technical considerations of course one should always seek to lower the pipe in a head or following sea situation as much as possible as this reduces the risk at a serious collision significantly. However due to wave spreading this will not completely take away the risk at a collision. Thereby there’s always the possibility of a failing winch and this may not jeopardise the safety of the hopper dredger in any situation. REFERENCES Glansdorp, C.C., and G.F.M Remery (1965). Botsingsnelheid van een hangende sloep tegen de huid van een
slingerend schip. Schip en Werf, Vol. 32, No.1. Heggeler ten, O.W.J. (2000). Het slingergedrag van zuigbuisconstructies (deel Ι). Report 2000.BT.5325, Delft, Delft
University of Technology, Faculty of Mechanical Engineering and Marine Technology, Section of Dredging Technology.
Heggeler ten, O.W.J. (2000). Het slingergedrag van zuigbuisconstructies (deel IΙ). Report 2000.BT.5326, Delft,
Delft University of Technology, Faculty of Mechanical Engineering and Marine Technology, Section of Dredging Technology.
Journée, J.M.J, W.W. Massie (1999). Offshore Hydromechanics. Delft, Delft University of Technology, Faculty of
Mechanical Engineering and Marine Technology. Reynen, J.W. (1993) Mechanica, College dictaat Mechanica II (deel B2). Delft, Delft University of Technology,
Faculty of Mechanical Engineering and Marine Technology, Section Technical Mechanics.
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

Bibliography Dr.ir. S.A. Miedema 1980-2010
1. Koert, P. & Miedema, S.A., "Report on the field excursion to the USA April 1981" (PDF in Dutch 27.2 MB). Delft University of Technology, 1981, 48 pages.
2. Miedema, S.A., "The flow of dredged slurry in and out hoppers and the settlement process in hoppers" (PDF in Dutch 37 MB). ScO/81/105, Delft University of Technology, 1981, 147 pages.
3. Miedema, S.A., "The soil reaction forces on a crown cutterhead on a swell compensated ladder" (PDF in Dutch 19 MB). LaO/81/97, Delft University of Technology, 1981, 36 pages.
4. Miedema, S.A., "Computer program for the determination of the reaction forces on a cutterhead, resulting from the motions of the cutterhead" (PDF in Dutch 11 MB). Delft Hydraulics, 1981, 82 pages.
5. Miedema, S.A. "The mathematical modeling of the soil reaction forces on a cutterhead and the development of the computer program DREDMO" (PDF in Dutch 25 MB). CO/82/125, Delft University of Technology, 1982, with appendices 600 pages.
6. Miedema, S.A.,"The Interaction between Cutterhead and Soil at Sea" (In Dutch). Proc. Dredging Day November 19th, Delft University of Technology 1982.
7. Miedema, S.A., "A comparison of an underwater centrifugal pump and an ejector pump" (PDF in Dutch 3.2 MB). Delft University of Technology, 1982, 18 pages.
8. Miedema, S.A., "Computer simulation of Dredging Vessels" (In Dutch). De Ingenieur, Dec. 1983. (Kivi/Misset).
9. Koning, J. de, Miedema, S.A., & Zwartbol, A., "Soil/Cutterhead Interaction under Wave Conditions (Adobe Acrobat PDF-File 1 MB)". Proc. WODCON X, Singapore 1983.
10. Miedema, S.A. "Basic design of a swell compensated cutter suction dredge with axial and radial compensation on the cutterhead" (PDF in Dutch 20 MB). CO/82/134, Delft University of Technology, 1983, 64 pages.
11. Miedema, S.A., "Design of a seagoing cutter suction dredge with a swell compensated ladder" (PDF in Dutch 27 MB). IO/83/107, Delft University of Technology, 1983, 51 pages.
12. Miedema, S.A., "Mathematical Modeling of a Seagoing Cutter Suction Dredge" (In Dutch). Published: The Hague, 18-9-1984, KIVI Lectures, Section Under Water Technology.
13. Miedema, S.A., "The Cutting of Densely Compacted Sand under Water (Adobe Acrobat PDF-File 575 kB)". Terra et Aqua No. 28, October 1984 pp. 4-10.
14. Miedema, S.A., "Longitudinal and Transverse Swell Compensation of a Cutter Suction Dredge" (In Dutch). Proc. Dredging Day November 9th 1984, Delft University of Technology 1984.
15. Miedema, S.A., "Compensation of Velocity Variations". Patent application no. 8403418, Hydromeer B.V. Oosterhout, 1984.
16. Miedema, S.A., "Mathematical Modeling of the Cutting of Densely Compacted Sand Under Water". Dredging & Port Construction, July 1985, pp. 22-26.
17. Miedema, S.A., "Derivation of the Differential Equation for Sand Pore Pressures". Dredging & Port Construction, September 1985, pp. 35.
18. Miedema, S.A., "The Application of a Cutting Theory on a Dredging Wheel (Adobe Acrobat 4.0 PDF-File 745 kB)". Proc. WODCON XI, Brighton 1986.
19. Miedema, S.A., "Underwater Soil Cutting: a Study in Continuity". Dredging & Port Construction, June 1986, pp. 47-53.
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema
20. Miedema, S.A., "The cutting of water saturated sand, laboratory research" (In Dutch). Delft University of Technology, 1986, 17 pages.
21. Miedema, S.A., "The forces on a trenching wheel, a feasibility study" (In Dutch). Delft, 1986, 57 pages + software.
22. Miedema, S.A., "The translation and restructuring of the computer program DREDMO from ALGOL to FORTRAN" (In Dutch). Delft Hydraulics, 1986, 150 pages + software.
23. Miedema, S.A., "Calculation of the Cutting Forces when Cutting Water Saturated Sand (Adobe Acrobat 4.0 PDF-File 16 MB)". Basic Theory and Applications for 3-D Blade Movements and Periodically Varying Velocities for, in Dredging Commonly used Excavating Means. Ph.D. Thesis, Delft University of Technology, September 15th 1987.
24. Bakker, A. & Miedema, S.A., "The Specific Energy of the Dredging Process of a Grab Dredge". Delft University of Technology, 1988, 30 pages.
25. Miedema, S.A., "On the Cutting Forces in Saturated Sand of a Seagoing Cutter Suction Dredge (Adobe Acrobat 4.0 PDF-File 1.5 MB)". Proc. WODCON XII, Orlando, Florida, USA, April 1989. This paper was given the IADC Award for the best technical paper on the subject of dredging in 1989.
26. Miedema, S.A., "The development of equipment for the determination of the wear on pick-points" (In Dutch). Delft University of Technology, 1990, 30 pages (90.3.GV.2749, BAGT 462).
27. Miedema, S.A., "Excavating Bulk Materials" (In Dutch). Syllabus PATO course, 1989 & 1991, PATO The Hague, The Netherlands.
28. Miedema, S.A., "On the Cutting Forces in Saturated Sand of a Seagoing Cutter Suction Dredge (Adobe Acrobat 4.0 PDF-File 1.5 MB)". Terra et Aqua No. 41, December 1989, Elseviers Scientific Publishers.
29. Miedema, S.A., "New Developments of Cutting Theories with respect to Dredging, the Cutting of Clay (Adobe Acrobat 4.0 PDF-File 640 kB)". Proc. WODCON XIII, Bombay, India, 1992.
30. Davids, S.W. & Koning, J. de & Miedema, S.A. & Rosenbrand, W.F., "Encapsulation: A New Method for the Disposal of Contaminated Sediment, a Feasibility Study (Adobe Acrobat 4.0 PDF-File 3MB)". Proc. WODCON XIII, Bombay, India, 1992.
31. Miedema, S.A. & Journee, J.M.J. & Schuurmans, S., "On the Motions of a Seagoing Cutter Dredge, a Study in Continuity (Adobe Acrobat 4.0 PDF-File 396 kB)". Proc. WODCON XIII, Bombay, India, 1992.
32. Becker, S. & Miedema, S.A. & Jong, P.S. de & Wittekoek, S., "On the Closing Process of Clamshell Dredges in Water Saturated Sand (Adobe Acrobat 4.0 PDF-File 1 MB)". Proc. WODCON XIII, Bombay, India, 1992. This paper was given the IADC Award for the best technical paper on the subject of dredging in 1992.
33. Becker, S. & Miedema, S.A. & Jong, P.S. de & Wittekoek, S., "The Closing Process of Clamshell Dredges in Water Saturated Sand (Adobe Acrobat 4.0 PDF-File 1 MB)". Terra et Aqua No. 49, September 1992, IADC, The Hague.
34. Miedema, S.A., "Modeling and Simulation of Dredging Processes and Systems". Symposium "Zicht op Baggerprocessen", Delft University of Technology, Delft, The Netherlands, 29 October 1992.
35. Miedema, S.A., "Dredmo User Interface, Operators Manual". Report: 92.3.GV.2995. Delft University of Technology, 1992, 77 pages.
36. Miedema, S.A., "Inleiding Mechatronica, college WBM202" Delft University of Technology, 1992.
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

37. Miedema, S.A. & Becker, S., "The Use of Modeling and Simulation in the Dredging Industry, in Particular the Closing Process of Clamshell Dredges", CEDA Dredging Days 1993, Amsterdam, Holland, 1993.
38. Miedema, S.A., "On the Snow-Plough Effect when Cutting Water Saturated Sand with Inclined Straight Blades (Adobe Acrobat 4.0 PDF-File 503 kB)". ASCE Proc. Dredging 94, Orlando, Florida, USA, November 1994. Additional Measurement Graphs. (Adobe Acrobat 4.0 PDF-File 209 kB).
39. Riet, E. van, Matousek, V. & Miedema, S.A., "A Reconstruction of and Sensitivity Analysis on the Wilson Model for Hydraulic Particle Transport (Adobe Acrobat 4.0 PDF-File 50 kB)". Proc. 8th Int. Conf. on Transport and Sedimentation of Solid Particles, 24-26 January 1995, Prague, Czech Republic.
40. Vlasblom, W.J. & Miedema, S.A., "A Theory for Determining Sedimentation and Overflow Losses in Hoppers (Adobe Acrobat 4.0 PDF-File 304 kB)". Proc. WODCON IV, November 1995, Amsterdam, The Netherlands 1995.
41. Miedema, S.A., "Production Estimation Based on Cutting Theories for Cutting Water Saturated Sand (Adobe Acrobat 4.0 PDF-File 423 kB)". Proc. WODCON IV, November 1995, Amsterdam, The Netherlands 1995. Additional Specific Energy and Production Graphs. (Adobe Acrobat 4.0 PDF-File 145 kB).
42. Riet, E.J. van, Matousek, V. & Miedema, S.A., "A Theoretical Description and Numerical Sensitivity Analysis on Wilson's Model for Hydraulic Transport in Pipelines (Adobe Acrobat 4.0 PDF-File 50 kB)". Journal of Hydrology & Hydromechanics, Slovak Ac. of Science, Bratislava, June 1996.
43. Miedema, S.A. & Vlasblom, W.J., "Theory for Hopper Sedimentation (Adobe Acrobat 4.0 PDF-File 304 kB)". 29th Annual Texas A&M Dredging Seminar. New Orleans, June 1996.
44. Miedema, S.A., "Modeling and Simulation of the Dynamic Behavior of a Pump/Pipeline System (Adobe Acrobat 4.0 PDF-File 318 kB)". 17th Annual Meeting & Technical Conference of the Western Dredging Association. New Orleans, June 1996.
45. Miedema, S.A., "Education of Mechanical Engineering, an Integral Vision". Faculty O.C.P., Delft University of Technology, 1997 (in Dutch).
46. Miedema, S.A., "Educational Policy and Implementation 1998-2003 (versions 1998, 1999 and 2000) (Adobe Acrobat 4.0 PDF_File 195 kB)". Faculty O.C.P., Delft University of Technology, 1998, 1999 and 2000 (in Dutch).
47. Keulen, H. van & Miedema, S.A. & Werff, K. van der, "Redesigning the curriculum of the first three years of the mechanical engineering curriculum". Proceedings of the International Seminar on Design in Engineering Education, SEFI-Document no.21, page 122, ISBN 2-87352-024-8, Editors: V. John & K. Lassithiotakis, Odense, 22-24 October 1998.
48. Miedema, S.A. & Klein Woud, H.K.W. & van Bemmel, N.J. & Nijveld, D., "Self Assesment Educational Programme Mechanical Engineering (Adobe Acrobat 4.0 PDF-File 400 kB)". Faculty O.C.P., Delft University of Technology, 1999.
49. Van Dijk, J.A. & Miedema, S.A. & Bout, G., "Curriculum Development Mechanical Engineering". MHO 5/CTU/DUT/Civil Engineering. Cantho University Vietnam, CICAT Delft, April 1999.
50. Miedema, S.A., "Considerations in building and using dredge simulators (Adobe Acrobat 4.0 PDF-File 296 kB)". Texas A&M 31st Annual Dredging Seminar. Louisville Kentucky, May 16-18, 1999.
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema
51. Miedema, S.A., "Considerations on limits of dredging processes (Adobe Acrobat 4.0 PDF-File 523 kB)". 19th Annual Meeting & Technical Conference of the Western Dredging Association. Louisville Kentucky, May 16-18, 1999.
52. Miedema, S.A. & Ruijtenbeek, M.G. v.d., "Quality management in reality", "Kwaliteitszorg in de praktijk". AKO conference on quality management in education. Delft University of Technology, November 3rd 1999.
53. Miedema, S.A., "Curriculum Development Mechanical Engineering (Adobe Acrobat 4.0 PDF-File 4 MB)". MHO 5-6/CTU/DUT. Cantho University Vietnam, CICAT Delft, Mission October 1999.
54. Vlasblom, W.J., Miedema, S.A., Ni, F., "Course Development on Topic 5: Dredging Technology, Dredging Equipment and Dredging Processes". Delft University of Technology and CICAT, Delft July 2000.
55. Miedema, S.A., Vlasblom, W.J., Bian, X., "Course Development on Topic 5: Dredging Technology, Power Drives, Instrumentation and Automation". Delft University of Technology and CICAT, Delft July 2000.
56. Randall, R. & Jong, P. de & Miedema, S.A., "Experience with cutter suction dredge simulator training (Adobe Acrobat 4.0 PDF-File 1.1 MB)". Texas A&M 32nd Annual Dredging Seminar. Warwick, Rhode Island, June 25-28, 2000.
57. Miedema, S.A., "The modelling of the swing winches of a cutter dredge in relation with simulators (Adobe Acrobat 4.0 PDF-File 814 kB)". Texas A&M 32nd Annual Dredging Seminar. Warwick, Rhode Island, June 25-28, 2000.
58. Hofstra, C. & Hemmen, A. van & Miedema, S.A. & Hulsteyn, J. van, "Describing the position of backhoe dredges (Adobe Acrobat 4.0 PDF-File 257 kB)". Texas A&M 32nd Annual Dredging Seminar. Warwick, Rhode Island, June 25-28, 2000.
59. Miedema, S.A., "Automation of a Cutter Dredge, Applied to the Dynamic Behaviour of a Pump/Pipeline System (Adobe Acrobat 4.0 PDF-File 254 kB)". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
60. Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis (Adobe Acrobat 4.0 PDF-File 110 kB)". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
61. Miedema, S.A. & Zhao Yi, "An Analytical Method of Pore Pressure Calculations when Cutting Water Saturated Sand (Adobe Acrobat PDF-File 2.2 MB)". Texas A&M 33nd Annual Dredging Seminar, June 2001, Houston, USA 2001.
62. Miedema, S.A., "A Numerical Method of Calculating the Dynamic Behaviour of Hydraulic Transport (Adobe Acrobat PDF-File 246 kB)". 21st Annual Meeting & Technical Conference of the Western Dredging Association, June 2001, Houston, USA 2001.
63. Zhao Yi, & Miedema, S.A., "Finite Element Calculations To Determine The Pore Pressures When Cutting Water Saturated Sand At Large Cutting Angles (Adobe Acrobat PDF-File 4.8 MB)". CEDA Dredging Day 2001, November 2001, Amsterdam, The Netherlands.
64. Miedema, S.A., "Mission Report Cantho University". MHO5/6, Phase Two, Mission to Vietnam by Dr.ir. S.A. Miedema DUT/OCP Project Supervisor, 27 September-8 October 2001, Delft University/CICAT.
65. (Zhao Yi), & (Miedema, S.A.), "
" (Finite Element Calculations To Determine The Pore Pressures When Cutting Water
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema
Saturated Sand At Large Cutting Angles (Adobe Acrobat PDF-File 4.8 MB))". To be published in 2002.
66. Miedema, S.A., & Riet, E.J. van, & Matousek, V., "Theoretical Description And Numerical Sensitivity Analysis On Wilson Model For Hydraulic Transport Of Solids In Pipelines (Adobe Acrobat PDF-File 147 kB)". WEDA Journal of Dredging Engineering, March 2002.
67. Miedema, S.A., & Ma, Y., "The Cutting of Water Saturated Sand at Large Cutting Angles (Adobe Acrobat PDF-File 3.6 MB)". Proc. Dredging02, May 5-8, Orlando, Florida, USA.
68. Miedema, S.A., & Lu, Z., "The Dynamic Behavior of a Diesel Engine (Adobe Acrobat PDF-File 363 kB)". Proc. WEDA XXII Technical Conference & 34th Texas A&M Dredging Seminar, June 12-15, Denver, Colorado, USA.
69. Miedema, S.A., & He, Y., "The Existance of Kinematic Wedges at Large Cutting Angles (Adobe Acrobat PDF-File 4 MB)". Proc. WEDA XXII Technical Conference & 34th Texas A&M Dredging Seminar, June 12-15, Denver, Colorado, USA.
70. Ma, Y., Vlasblom, W.J., Miedema, S.A., Matousek, V., "Measurement of Density and Velocity in Hydraulic Transport using Tomography". Dredging Days 2002, Dredging without boundaries, Casablanca, Morocco, V64-V73, 22-24 October 2002.
71. Ma, Y., Miedema, S.A., Vlasblom, W.J., "Theoretical Simulation of the Measurements Process of Electrical Impedance Tomography". Asian Simulation Conference/5th International Conference on System Simulation and Scientific Computing, Shanghai, 3-6 November 2002, p. 261-265, ISBN 7-5062-5571-5/TP.75.
72. Thanh, N.Q., & Miedema, S.A., "Automotive Electricity and Electronics". Delft University of Technology and CICAT, Delft December 2002.
73. Miedema, S.A., Willemse, H.R., "Report on MHO5/6 Mission to Vietnam". Delft University of Technology and CICAT, Delft Januari 2003.
74. Ma, Y., Miedema, S.A., Matousek, V., Vlasblom, W.J., "Tomography as a Measurement Method for Density and Velocity Distributions". 23rd WEDA Technical Conference & 35th TAMU Dredging Seminar, Chicago, USA, june 2003.
75. Miedema, S.A., Lu, Z., Matousek, V., "Numerical Simulation of a Development of a Density Wave in a Long Slurry Pipeline". 23rd WEDA Technical Conference & 35th TAMU Dredging Seminar, Chicago, USA, june 2003.
76. Miedema, S.A., Lu, Z., Matousek, V., "Numerical simulation of the development of density waves in a long pipeline and the dynamic system behavior". Terra et Aqua, No. 93, p. 11-23.
77. Miedema, S.A., Frijters, D., "The Mechanism of Kinematic Wedges at Large Cutting Angles - Velocity and Friction Measurements". 23rd WEDA Technical Conference & 35th TAMU Dredging Seminar, Chicago, USA, june 2003.
78. Tri, Nguyen Van, Miedema, S.A., Heijer, J. den, "Machine Manufacturing Technology". Lecture notes, Delft University of Technology, Cicat and Cantho University Vietnam, August 2003.
79. Miedema, S.A., "MHO5/6 Phase Two Mission Report". Report on a mission to Cantho University Vietnam October 2003. Delft University of Technology and CICAT, November 2003.
80. Zwanenburg, M., Holstein, J.D., Miedema, S.A., Vlasblom, W.J., "The Exploitation of Cockle Shells". CEDA Dredging Days 2003, Amsterdam, The Netherlands, November 2003.
81. Zhi, L., Miedema, S.A., Vlasblom, W.J., Verheul, C.H., "Modeling and Simulation of the Dynamic Behaviour of TSHD's Suction Pipe System by using Adams". CHIDA Dredging Days, Shanghai, China, november 2003.
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

82. Miedema, S.A., "The Existence of Kinematic Wedges at Large Cutting Angles". CHIDA Dredging Days, Shanghai, China, november 2003.
83. Miedema, S.A., Lu, Z., Matousek, V., "Numerical Simulation of the Development of Density Waves in a Long Pipeline and the Dynamic System Behaviour". Terra et Aqua 93, December 2003.
84. Miedema, S.A. & Frijters, D.D.J., "The wedge mechanism for cutting of water saturated sand at large cutting angles". WODCON XVII, September 2004, Hamburg Germany.
85. Verheul, O. & Vercruijsse, P.M. & Miedema, S.A., "The development of a concept for accurate and efficient dredging at great water depths". WODCON XVII, September 2004, Hamburg Germany.
86. Miedema, S.A., "THE CUTTING MECHANISMS OF WATER SATURATED SAND AT SMALL AND LARGE CUTTING ANGLES". International Conference on Coastal Infrastructure Development - Challenges in the 21st Century. HongKong, november 2004.
87. Ir. M. Zwanenburg , Dr. Ir. S.A. Miedema , Ir J.D. Holstein , Prof.ir. W.J.Vlasblom, "REDUCING THE DAMAGE TO THE SEA FLOOR WHEN DREDGING COCKLE SHELLS". WEDAXXIV & TAMU36, Orlando, Florida, USA, July 2004.
88. Verheul, O. & Vercruijsse, P.M. & Miedema, S.A., "A new concept for accurate and efficient dredging in deep water". Ports & Dredging, IHC, 2005, E163.
89. Miedema, S.A., "Scrapped?". Dredging & Port Construction, September 2005. 90. Miedema, S.A. & Vlasblom, W.J., " Bureaustudie Overvloeiverliezen". In opdracht
van Havenbedrijf Rotterdam, September 2005, Confidential. 91. He, J., Miedema, S.A. & Vlasblom, W.J., "FEM Analyses Of Cutting Of Anisotropic
Densely Compacted and Saturated Sand", WEDAXXV & TAMU37, New Orleans, USA, June 2005.
92. Miedema, S.A., "The Cutting of Water Saturated Sand, the FINAL Solution". WEDAXXV & TAMU37, New Orleans, USA, June 2005.
93. Miedema, S.A. & Massie, W., "Selfassesment MSc Offshore Engineering", Delft University of Technology, October 2005.
94. Miedema, S.A., "THE CUTTING OF WATER SATURATED SAND, THE SOLUTION". CEDA African Section: Dredging Days 2006 - Protection of the coastline, dredging sustainable development, Nov. 1-3, Tangiers, Morocco.
95. Miedema, S.A., "La solution de prélèvement par désagrégation du sable saturé en eau". CEDA African Section: Dredging Days 2006 - Protection of the coastline, dredging sustainable development, Nov. 1-3, Tangiers, Morocco.
96. Miedema, S.A. & Vlasblom, W.J., "THE CLOSING PROCESS OF CLAMSHELL DREDGES IN WATER-SATURATED SAND". CEDA African Section: Dredging Days 2006 - Protection of the coastline, dredging sustainable development, Nov. 1-3, Tangiers, Morocco.
97. Miedema, S.A. & Vlasblom, W.J., "Le processus de fermeture des dragues à benne preneuse en sable saturé". CEDA African Section: Dredging Days 2006 - Protection of the coastline, dredging sustainable development, Nov. 1-3, Tangiers, Morocco.
98. Miedema, S.A. "THE CUTTING OF WATER SATURATED SAND, THE SOLUTION". The 2nd China Dredging Association International Conference & Exhibition, themed 'Dredging and Sustainable Development' and in Guangzhou, China, May 17-18 2006.
99. Ma, Y, Ni, F. & Miedema, S.A., "Calculation of the Blade Cutting Force for small Cutting Angles based on MATLAB". The 2nd China Dredging Association
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

International Conference & Exhibition, themed 'Dredging and Sustainable Development' and in Guangzhou, China, May 17-18 2006.
100. ,"" (download). The 2nd China Dredging
Association International Conference & Exhibition, themed 'Dredging and Sustainable Development' and in Guangzhou, China, May 17-18 2006.
101. Miedema, S.A. , Kerkvliet, J., Strijbis, D., Jonkman, B., Hatert, M. v/d, "THE DIGGING AND HOLDING CAPACITY OF ANCHORS". WEDA XXVI AND TAMU 38, San Diego, California, June 25-28, 2006.
102. Schols, V., Klaver, Th., Pettitt, M., Ubuan, Chr., Miedema, S.A., Hemmes, K. & Vlasblom, W.J., "A FEASIBILITY STUDY ON THE APPLICATION OF FUEL CELLS IN OIL AND GAS SURFACE PRODUCTION FACILITIES". Proceedings of FUELCELL2006, The 4th International Conference on FUEL CELL SCIENCE, ENGINEERING and TECHNOLOGY, June 19-21, 2006, Irvine, CA.
103. Miedema, S.A., "Polytechnisch Zakboek 51ste druk, Hoofdstuk G: Werktuigbouwkunde", pG1-G88, Reed Business Information, ISBN-10: 90.6228.613.5, ISBN-13: 978.90.6228.613.3. Redactie: Fortuin, J.B., van Herwijnen, F., Leijendeckers, P.H.H., de Roeck, G. & Schwippert, G.A.
104. MA Ya-sheng, NI Fu-sheng, S.A. Miedema, "Mechanical Model of Water Saturated Sand Cutting at Blade Large Cutting Angles", Journal of Hohai University Changzhou, ISSN 1009-1130, CN 32-1591, 2006. 绞刀片大角度切削水饱和沙的力学模型, 马亚生[1] 倪福生[1] S.A.Miedema[2], 《河海大学常州分校学报》-2006年20卷3期 -59-61页
105. Miedema, S.A., Lager, G.H.G., Kerkvliet, J., “An Overview of Drag Embedded Anchor Holding Capacity for Dredging and Offshore Applications”. WODCON, Orlando, USA, 2007.
106. Miedema, S.A., Rhee, C. van, “A SENSITIVITY ANALYSIS ON THE EFFECTS OF DIMENSIONS AND GEOMETRY OF TRAILING SUCTION HOPPER DREDGES”. WODCON ORLANDO, USA, 2007.
107. Miedema, S.A., Bookreview: Useless arithmetic, why environmental scientists can't predict the future, by Orrin H. Pilkey & Linda Pilkey-Jarvis. Terra et Aqua 108, September 2007, IADC, The Hague, Netherlands.
108. Miedema, S.A., Bookreview: The rock manual: The use of rock in hydraulic engineering, by CIRIA, CUR, CETMEF. Terra et Aqua 110, March 2008, IADC, The Hague, Netherlands.
109. Miedema, S.A., "An Analytical Method To Determine Scour". WEDA XXVIII & Texas A&M 39. St. Louis, USA, June 8-11, 2008.
110. Miedema, S.A., "A Sensitivity Analysis Of The Production Of Clamshells". WEDA XXVIII & Texas A&M 39. St. Louis, USA, June 8-11, 2008.
111. Miedema, S.A., "An Analytical Approach To The Sedimentation Process In Trailing Suction Hopper Dredgers". Terra et Aqua 112, September 2008, IADC, The Hague, Netherlands.
112. Hofstra, C.F., & Rhee, C. van, & Miedema, S.A. & Talmon, A.M., "On The Particle Trajectories In Dredge Pump Impellers". 14th International Conference Transport & Sedimentation Of Solid Particles. June 23-27 2008, St. Petersburg, Russia.
113. Miedema, S.A., "A Sensitivity Analysis Of The Production Of Clamshells". WEDA Journal of Dredging Engineering, December 2008.
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema

114. Miedema, S.A., "New Developments Of Cutting Theories With Respect To Dredging, The Cutting Of Clay And Rock". WEDA XXIX & Texas A&M 40. Phoenix Arizona, USA, June 14-17 2009.
115. Miedema, S.A., "A Sensitivity Analysis Of The Scaling Of TSHD's". WEDA XXIX & Texas A&M 40. Phoenix Arizona, USA, June 14-17 2009.
116. Liu, Z., Ni, F., Miedema, S.A., “Optimized design method for TSHD’s swell compensator, basing on modelling and simulation”. International Conference on Industrial Mechatronics and Automation, pp. 48-52. Chengdu, China, May 15-16, 2009.
117. Miedema, S.A., "The effect of the bed rise velocity on the sedimentation process in hopper dredges". Journal of Dredging Engineering, Vol. 10, No. 1 , 10-31, 2009.
118. Miedema, S.A., “New developments of cutting theories with respect to offshore applications, the cutting of sand, clay and rock”. ISOPE 2010, Beijing China, June 2010.
119. Miedema, S.A., “The influence of the strain rate on cutting processes”. ISOPE 2010, Beijing China, June 2010.
120. Ramsdell, R.C., Miedema, S.A., “Hydraulic transport of sand/shell mixtures”. WODCON XIX, Beijing China, September 2010.
121. Abdeli, M., Miedema, S.A., Schott, D., Alvarez Grima, M., “The application of discrete element modeling in dredging”. WODCON XIX, Beijing China, September 2010.
122. Hofstra, C.F., Miedema, S.A., Rhee, C. van, “Particle trajectories near impeller blades in centrifugal pumps. WODCON XIX, Beijing China, September 2010.
123. Miedema, S.A., “Constructing the Shields curve, a new theoretical approach and its applications”. WODCON XIX, Beijing China, September 2010.
124. Miedema, S.A., “The effect of the bed rise velocity on the sedimentation process in hopper dredges”. WODCON XIX, Beijing China, September 2010.
Heggeler, O.W.J. ten, Vercruysse, P.M., Miedema, S.A., "On the Motions of Suction Pipe Constructions a Dynamic Analysis". Proc. WODCON VI, April 2001, Kuala Lumpur, Malaysia 2001.
Copyright: Dr.ir. S.A. Miedema


![DOUBLE SUCTION FLOOR-MOUNTED PUMPS ... PIPE HANGER (TYPICAL) INSTALL HANGER AS CLOSE TO PIPE ELBOW AS POSSIBLE (TYPICAL) 1/2" [15mm] FLEXIBLE CONNECTOR SUCTION DIFFUSER WITH BUILT-IN](https://img.pdfslide.net/doc/110x75/5afdaf247f8b9a68498d380e/double-suction-floor-mounted-pumps-pipe-hanger-typical-install-hanger-as-close.jpg)


























