Embed Size (px)
Citation preview
Online Learning in Complex Environments
Aditya Gopalan (ece @ iisc)
MLSIG, 30 March 2015
(joint work with Shie Mannor, Yishay Mansour)
Machine Learning
Learning by Experience = Reinforcement Learning (RL)– (Action 1, Reward 1), (Action 2, Reward 2), …– Act based on past data, future data/rewards depend on present
action; maximize some notion of utility / reward– Data interactively gathered
Algorithms/systems for learning to “do stuff” …
… with data/observations of some sort.
- R. E. Schapire
(Simple) Multi-Armed Bandit
“arms” or actions
1 2 3 N…
each arm is an unknown probability distribution with parameter and mean (think Bernoulli)
(items in a recommender system, transmission freqs, trades, …)
2
(Simple) Multi-Armed Bandit
1 3 N…
Play arm, collect iid “reward”
(ad clicks, data rate, profit, …)
Time 1
(Simple) Multi-Armed Bandit
1 2 3 N…
Time 2
(Simple) Multi-Armed Bandit
1 3 N…2Time 3

(Simple) Multi-Armed Bandit
1 3 N…2
Time 4
(Simple) Multi-Armed Bandit
1 2 3 N…
Play awhile …
Time
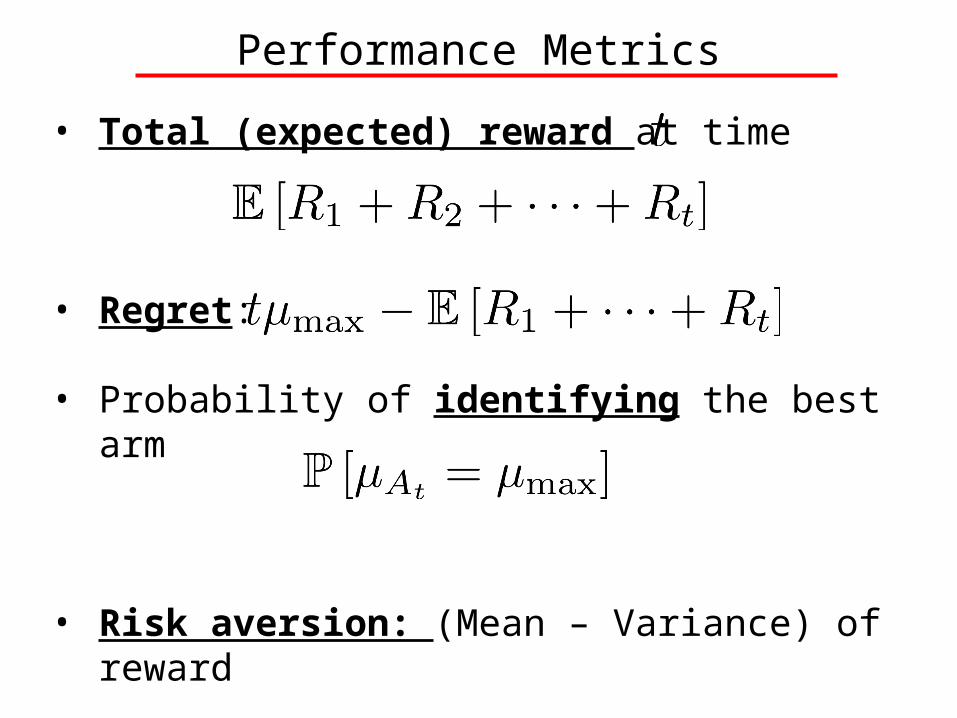
Performance Metrics
• Total (expected) reward at time
• Regret:
• Probability of identifying the best arm
• Risk aversion: (Mean – Variance) of reward
…
Motivation, Applications
• Clinical trials (original)• Internet Advertising• A/B testing• Comment Scoring• Cognitive Radio• Dynamic Pricing• Sequential Investment• Noisy Function Optimization• Adaptive Routing/Congestion Control• Job Scheduling• Bidding in auctions• Crowdsourcing• Learning in games
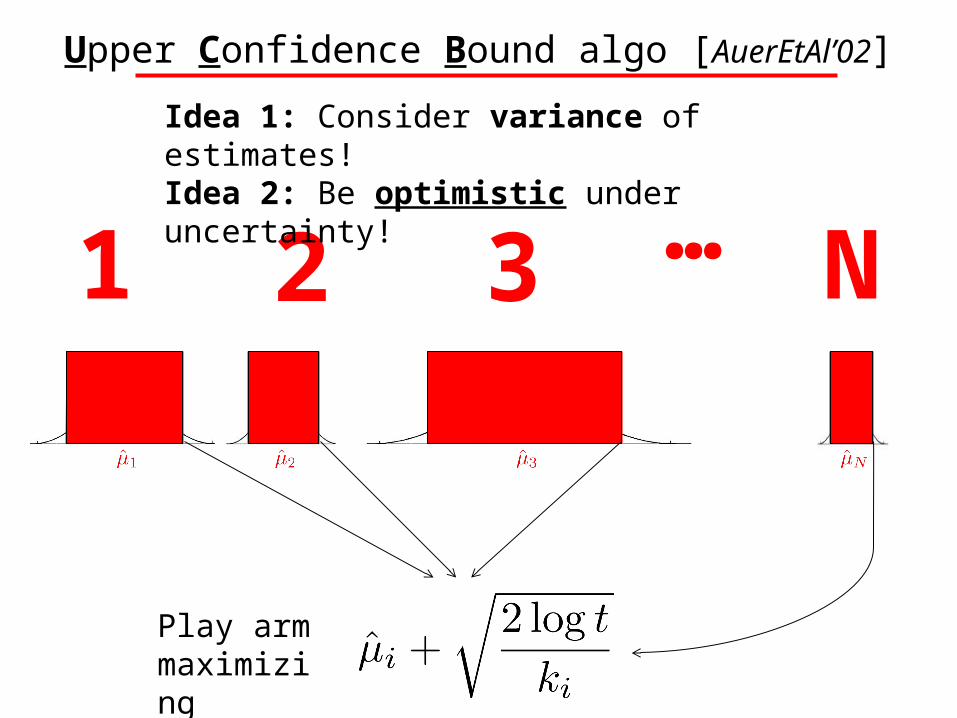
Upper Confidence Bound algo [AuerEtAl’02]
Play arm maximizing
1 2 3 N…Idea 1: Consider variance of estimates!Idea 2: Be optimistic under uncertainty!
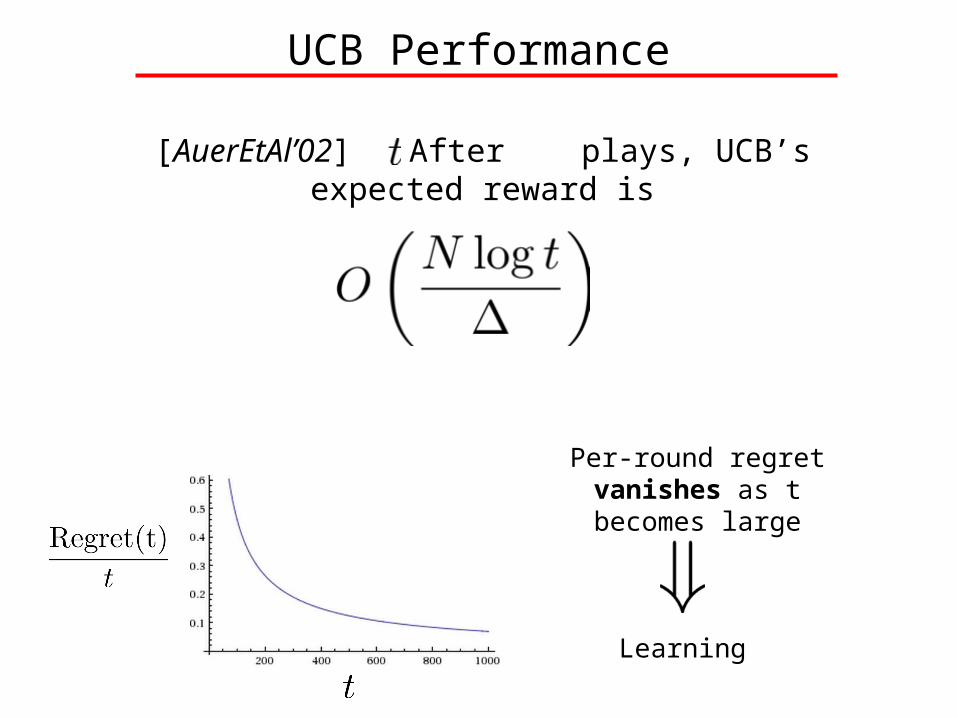
UCB Performance
[AuerEtAl’02] After plays, UCB’s expected reward is
Per-round regret vanishes as t becomes large
Learning
Variations on the Theme
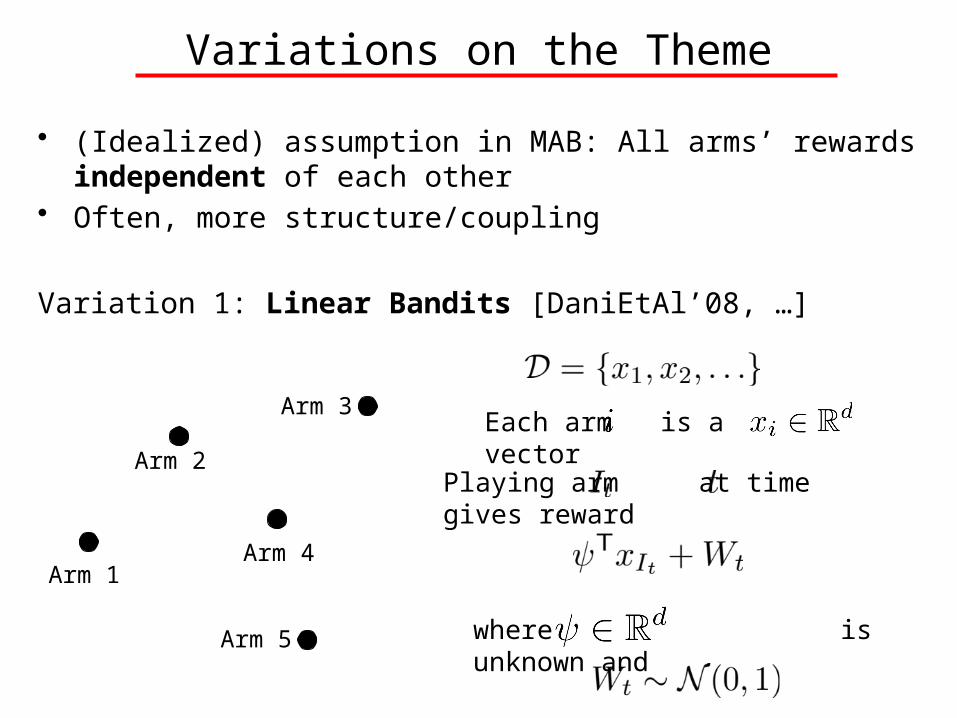
• (Idealized) assumption in MAB: All arms’ rewards independent of each other
• Often, more structure/coupling
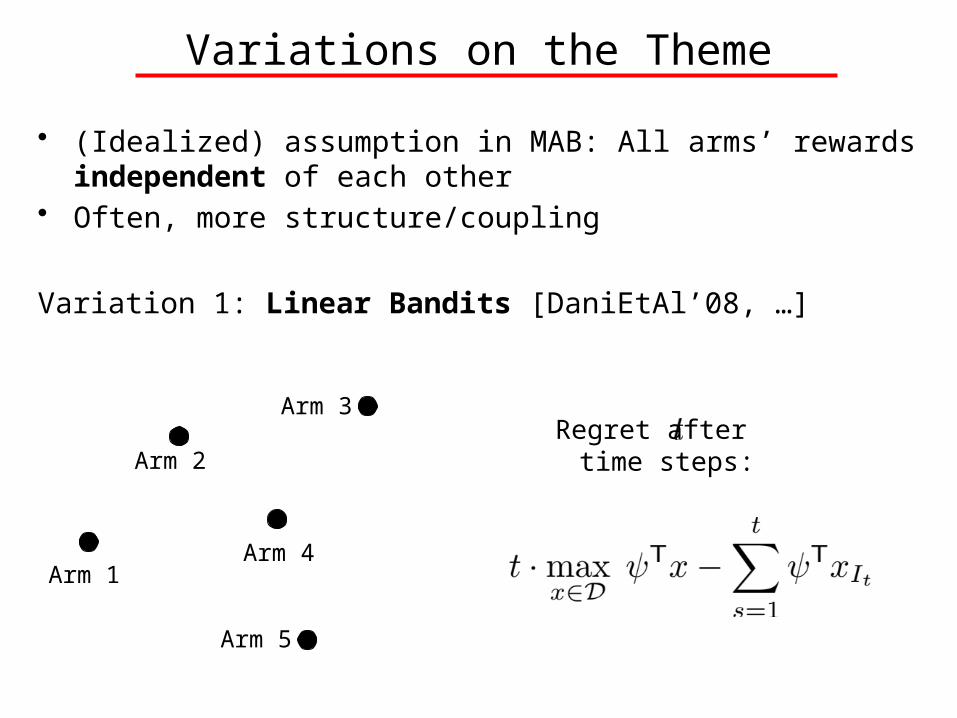
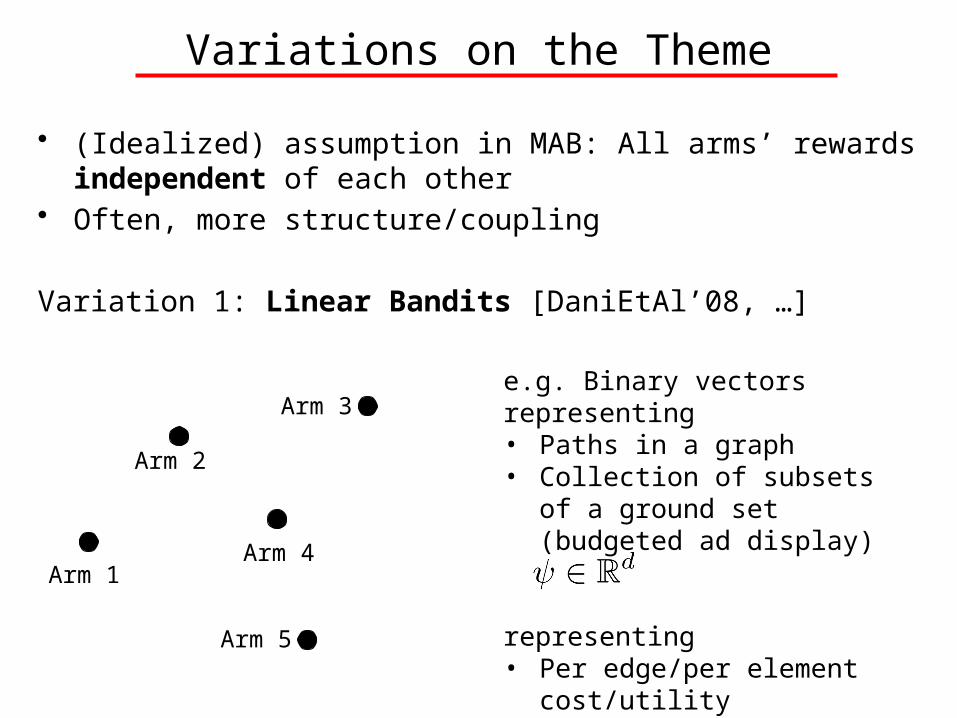
Variation 1: Linear Bandits [DaniEtAl’08, …]
Arm 1
Arm 2
Arm 3
Arm 4
Arm 5
Each arm is a vector
Playing arm at time gives reward
where is unknown and
Variations on the Theme
• (Idealized) assumption in MAB: All arms’ rewards independent of each other
• Often, more structure/coupling
Variation 1: Linear Bandits [DaniEtAl’08, …]
Arm 1
Arm 2
Arm 3
Arm 4
Arm 5
Regret after time steps:
Variations on the Theme
• (Idealized) assumption in MAB: All arms’ rewards independent of each other
• Often, more structure/coupling
Variation 1: Linear Bandits [DaniEtAl’08, …]
Arm 1
Arm 2
Arm 3
Arm 4
Arm 5
e.g. Binary vectors representing• Paths in a graph• Collection of subsets of a
ground set (budgeted ad display)
representing• Per edge/per element
cost/utility
Variations on the Theme
• (Idealized) assumption in MAB: All arms’ distributions/parameters independent/separate of each other
• Often, more structure/coupling
Variation 1: Linear Bandits [DaniEtAl’08, …]
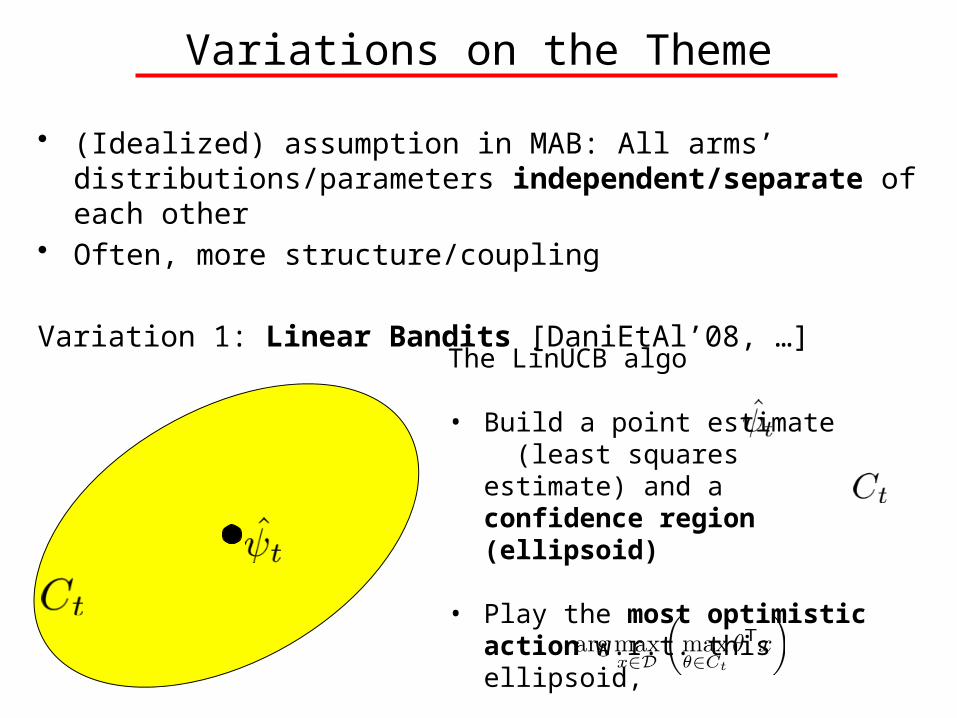
The LinUCB algo
• Build a point estimate (least squares estimate) and a confidence region (ellipsoid)
• Play the most optimistic action w.r.t. this ellipsoid,
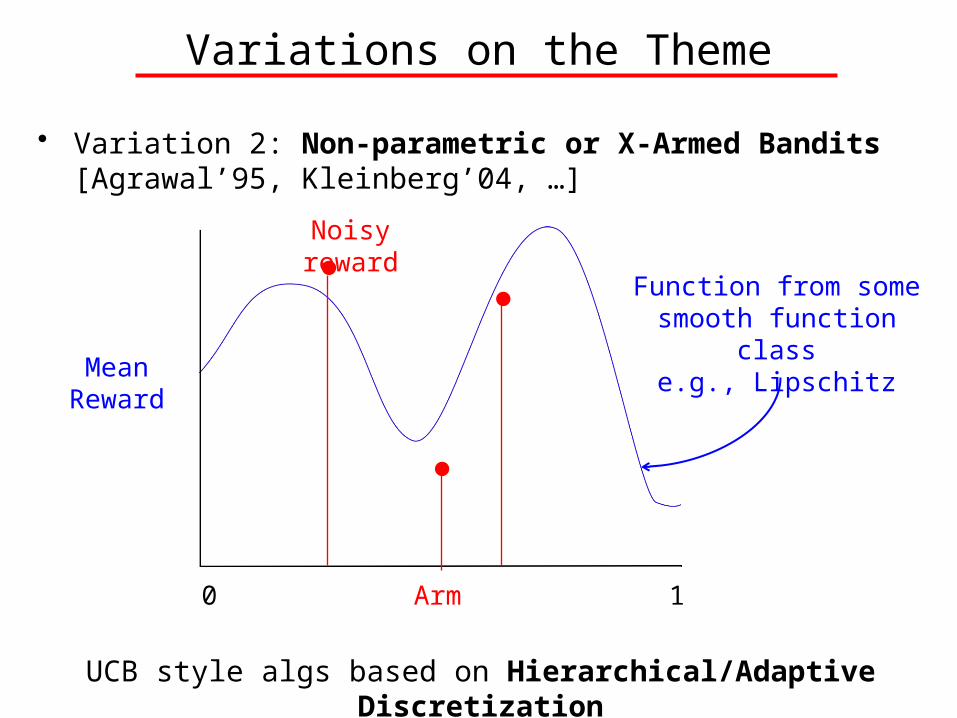
Variations on the Theme
• Variation 2: Non-parametric or X-Armed Bandits [Agrawal’95, Kleinberg’04, …]
Arm
Mean Reward
0 1
Function from some smooth function class
e.g., Lipschitz
UCB style algs based on Hierarchical/Adaptive Discretization
Noisy reward
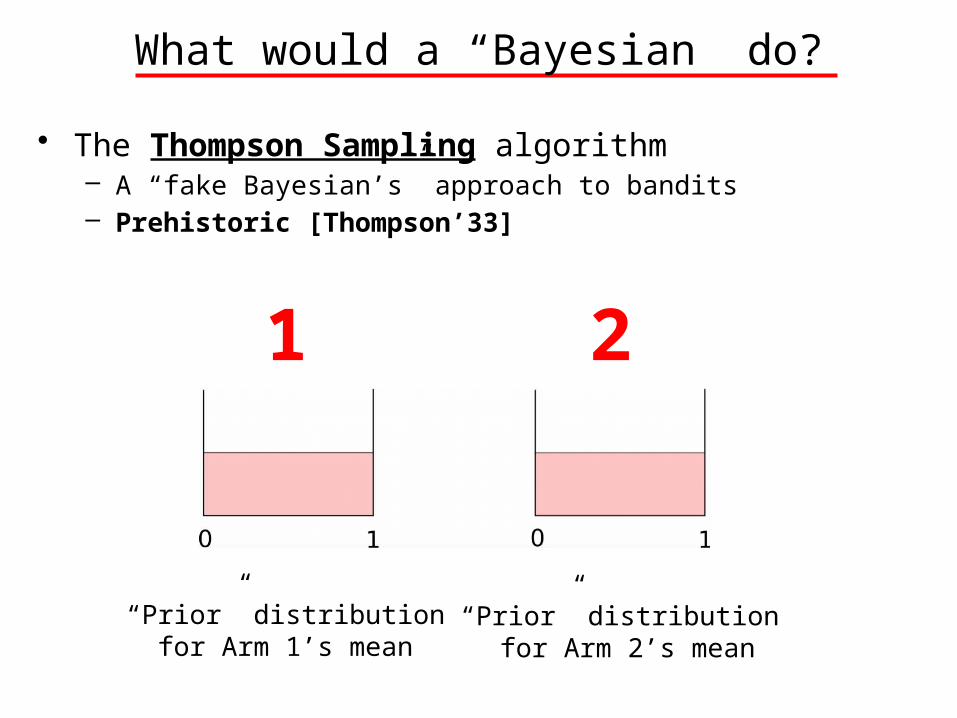
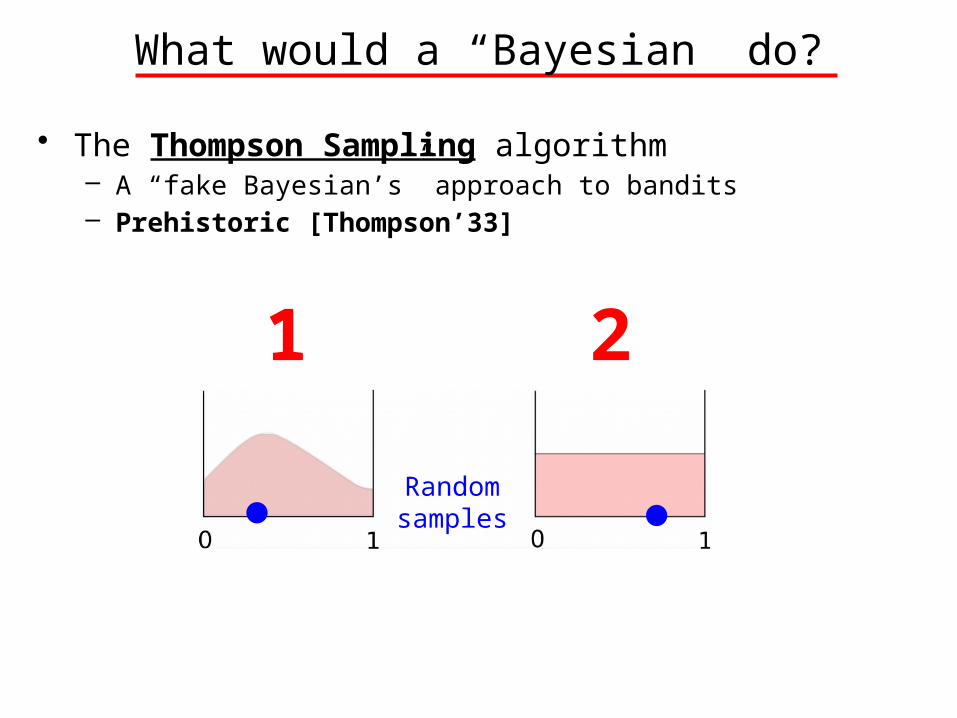
What would a “Bayesian” do?
• The Thompson Sampling algorithm– A “fake Bayesian’s” approach to bandits– Prehistoric [Thompson’33]
1 2
“Prior” distributionfor Arm 1’s mean
“Prior” distribution for Arm 2’s mean
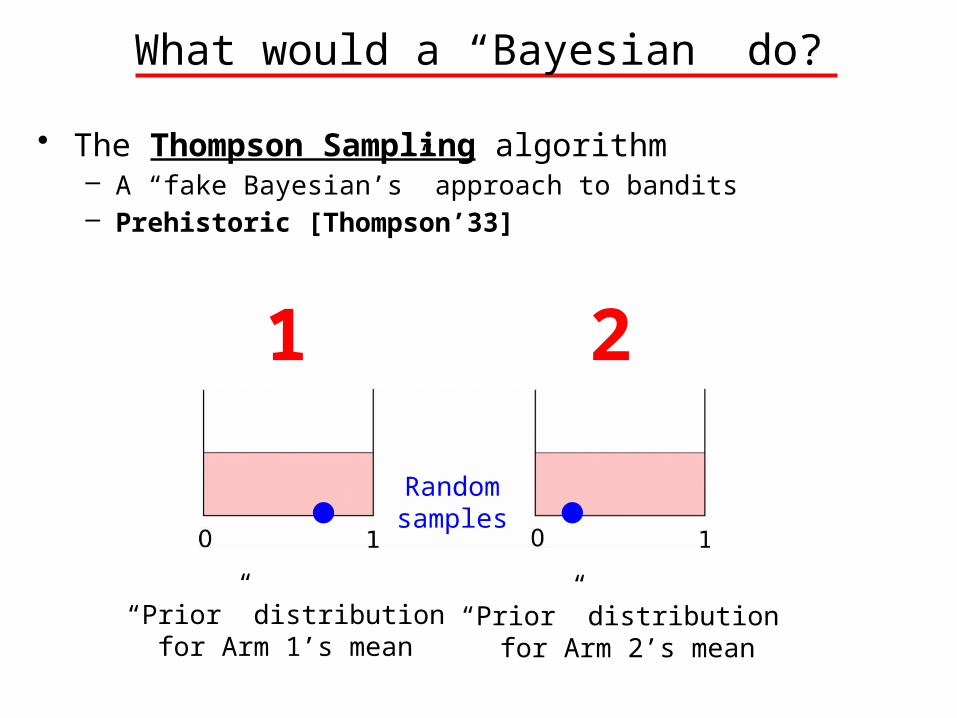
What would a “Bayesian” do?
• The Thompson Sampling algorithm– A “fake Bayesian’s” approach to bandits– Prehistoric [Thompson’33]
1 2
“Prior” distributionfor Arm 1’s mean
“Prior” distribution for Arm 2’s mean
Random samples
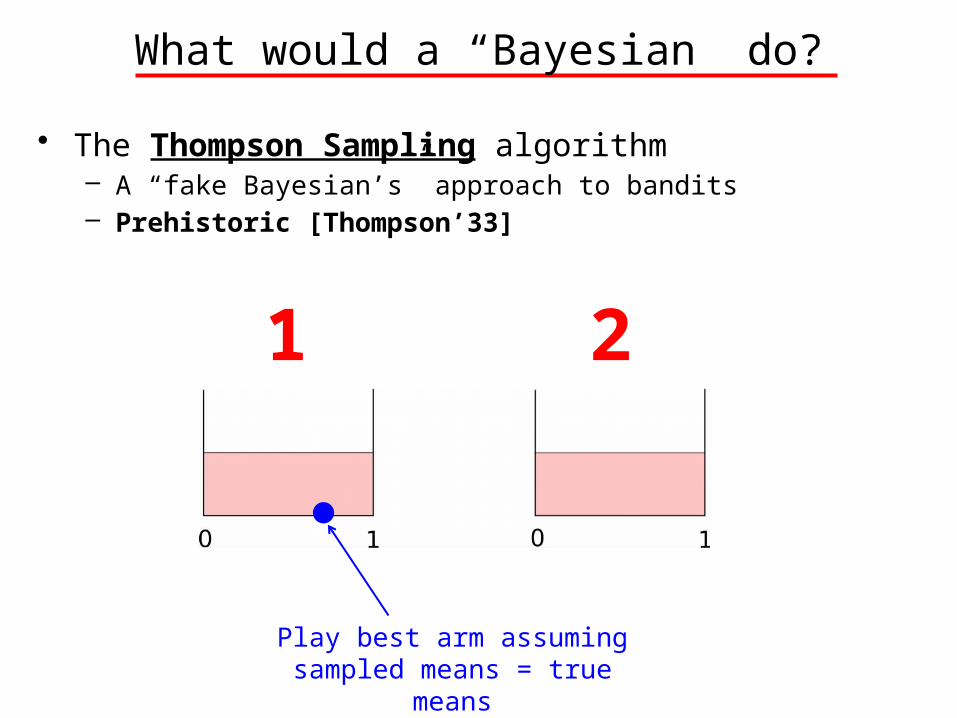
What would a “Bayesian” do?
• The Thompson Sampling algorithm– A “fake Bayesian’s” approach to bandits– Prehistoric [Thompson’33]
1 2
Play best arm assuming sampled means = true
means

What would a “Bayesian” do?
• The Thompson Sampling algorithm– A “fake Bayesian’s” approach to bandits– Prehistoric [Thompson’33]
1 2
Update to “Posterior”, Bayes’ Rule
What would a “Bayesian” do?
• The Thompson Sampling algorithm– A “fake Bayesian’s” approach to bandits– Prehistoric [Thompson’33]
1 2
Random samples

What would a “Bayesian” do?
• The Thompson Sampling algorithm– A “fake Bayesian’s” approach to bandits– Prehistoric [Thompson’33]
1 2
Play best arm assuming sampled means = true
means

What would a “Bayesian” do?
• The Thompson Sampling algorithm– A “fake Bayesian’s” approach to bandits– Prehistoric [Thompson’33]
1 2
Update to “Posterior”, Bayes’ Rule
What we know
• [Thompson 1933], [Ortega-Braun 2010]• [Agr-Goy 2011,2012]
– Optimal for standard MAB– Linear contextual bandits
• [Kaufmann et al. 2012,2013] – Standard MAB optimality
• Purely Bayesian setting – Bayesian regret– [Russo-VanRoy 2013]– [Bubeck-Liu 2013]
• But analysis doesn’t generalize– Specific conjugate priors, – No closed-form for complex bandit feedback e.g. MAX

TS for Linear Bandits
Shipra Agrawal, Navin Goyal. Thompson Sampling for Contextual Bandits with Linear Payoffs. ICML 2013.
Idea: Use same Least Squares estimate as Lin-UCB, but sample from (multivariate Gaussian) posterior and act greedily! (no need to optimize over an ellipsoid)
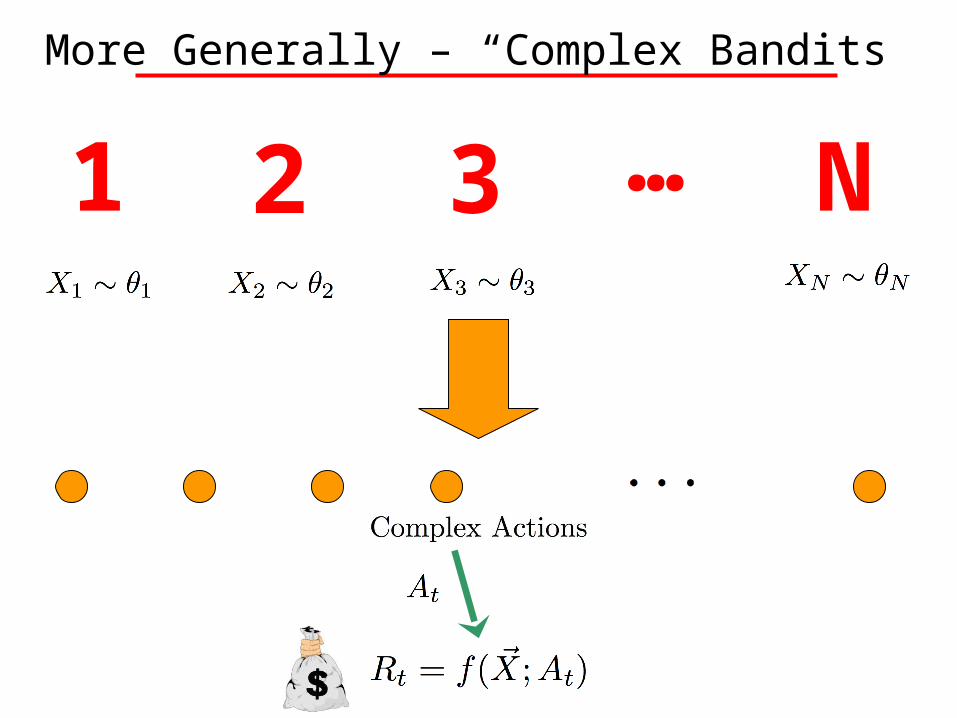
More Generally – “Complex Bandits”
1 2 3 N…
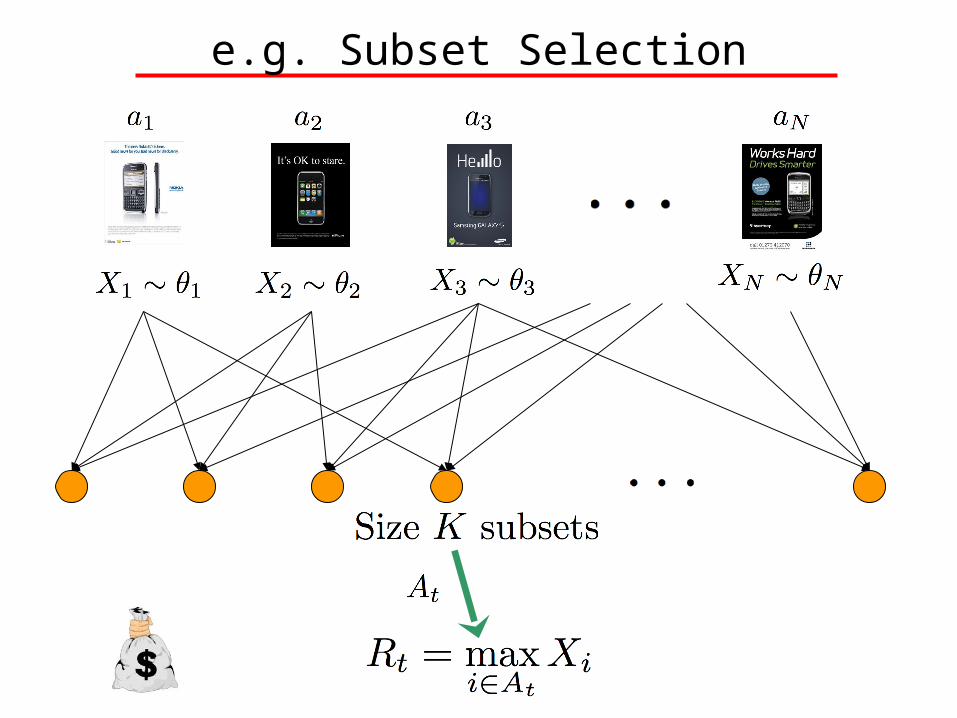
e.g. Subset Selection

e.g. Job Scheduling
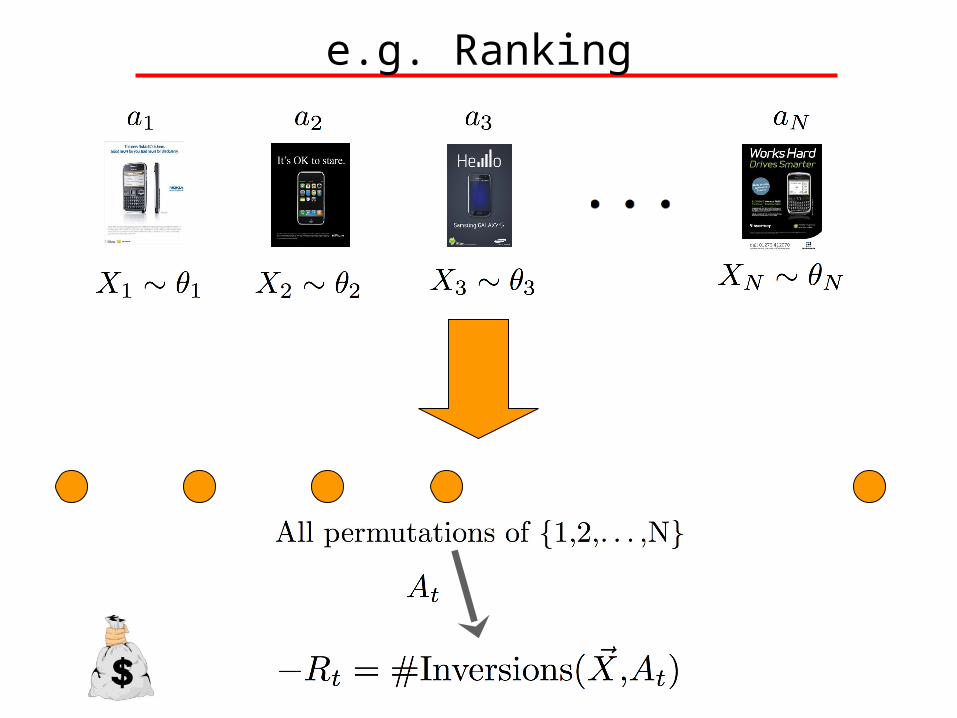
e.g. Ranking
General Thompson Sampling
Imagine ‘fictitious’ prior distribution over all parameters
General Thompson Sampling
Sample a set of parameters
Prior
General Thompson Sampling
Assume is true, play BestAction( )
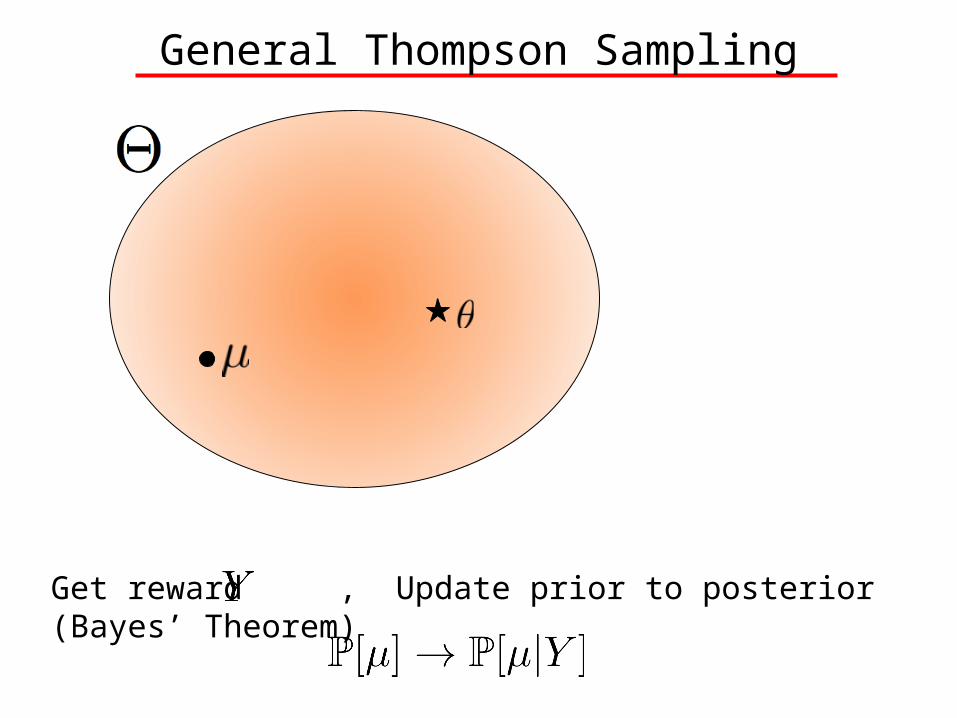
General Thompson Sampling
Get reward , Update prior to posterior (Bayes’ Theorem)
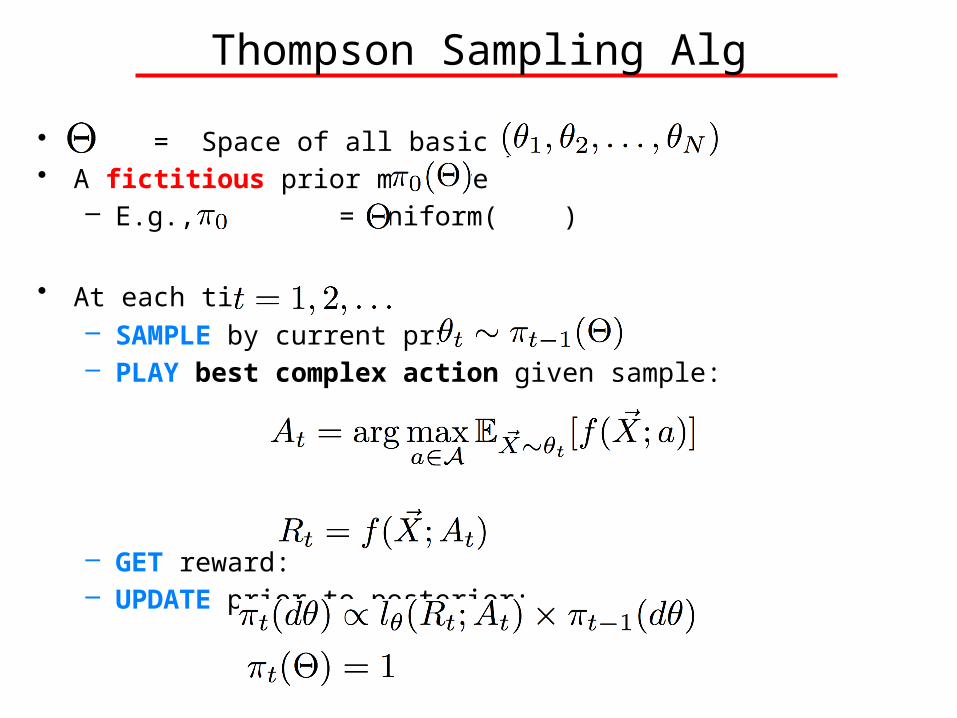
Thompson Sampling Alg
• = Space of all basic parameters • A fictitious prior measure
– E.g., = Uniform( )
• At each time – SAMPLE by current prior: – PLAY best complex action given sample:
– GET reward: – UPDATE prior to posterior:
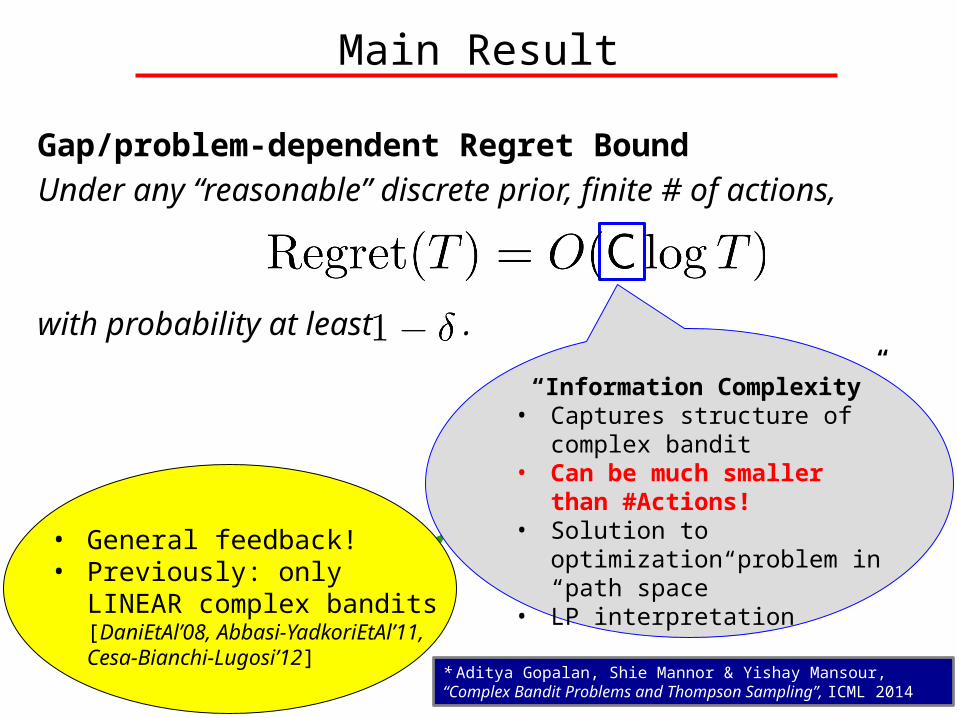
Main Result
Gap/problem-dependent Regret Bound
Under any “reasonable” discrete prior, finite # of actions,
with probability at least .
“Information Complexity”• Captures structure of complex
bandit• Can be much smaller than
#Actions!• Solution to optimization problem
in “path space”• LP interpretation
• General feedback!• Previously: only LINEAR
complex bandits [DaniEtAl’08, Abbasi-YadkoriEtAl’11, Cesa-Bianchi-Lugosi’12]
* Aditya Gopalan, Shie Mannor & Yishay Mansour, “Complex Bandit Problems and Thompson Sampling”, ICML 2014
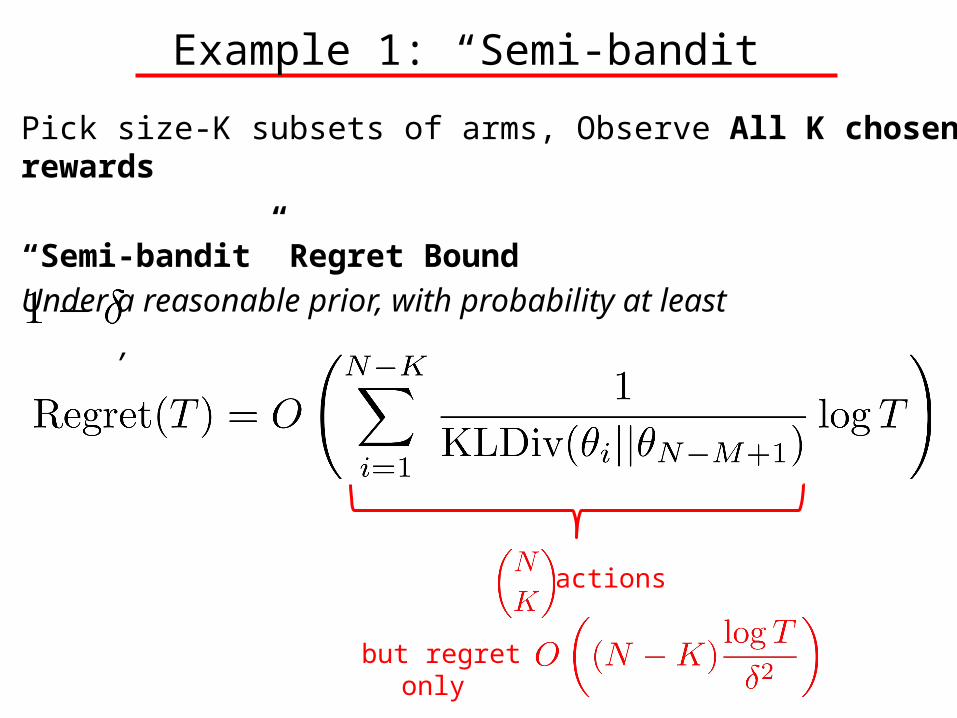
Example 1: “Semi-bandit”
Pick size-K subsets of arms, Observe All K chosen rewards
“Semi-bandit” Regret Bound
Under a reasonable prior, with probability at least
,
actions
but regret only

Example 2: MAX Feedback
Pick size-K subsets of arms, Observe MAX of K chosen rewards
Regret Bound under Max Feedback Structure
Under a reasonable prior, with probability at least
,
SAVING! #ACTIONSBOUND
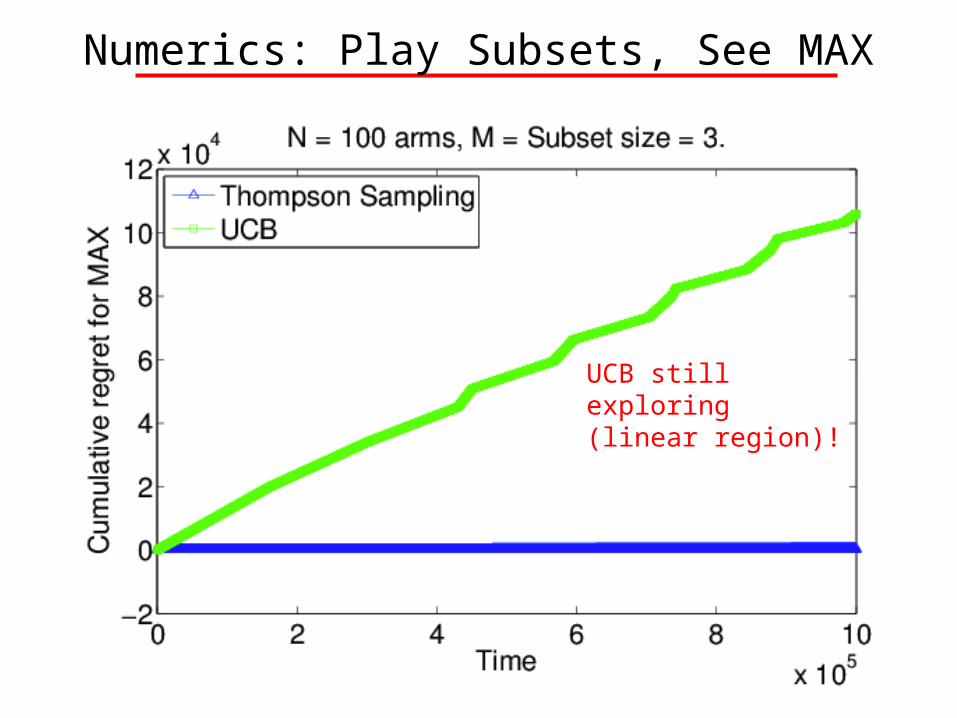
Numerics: Play Subsets, See MAX
UCB still exploring (linear region)!
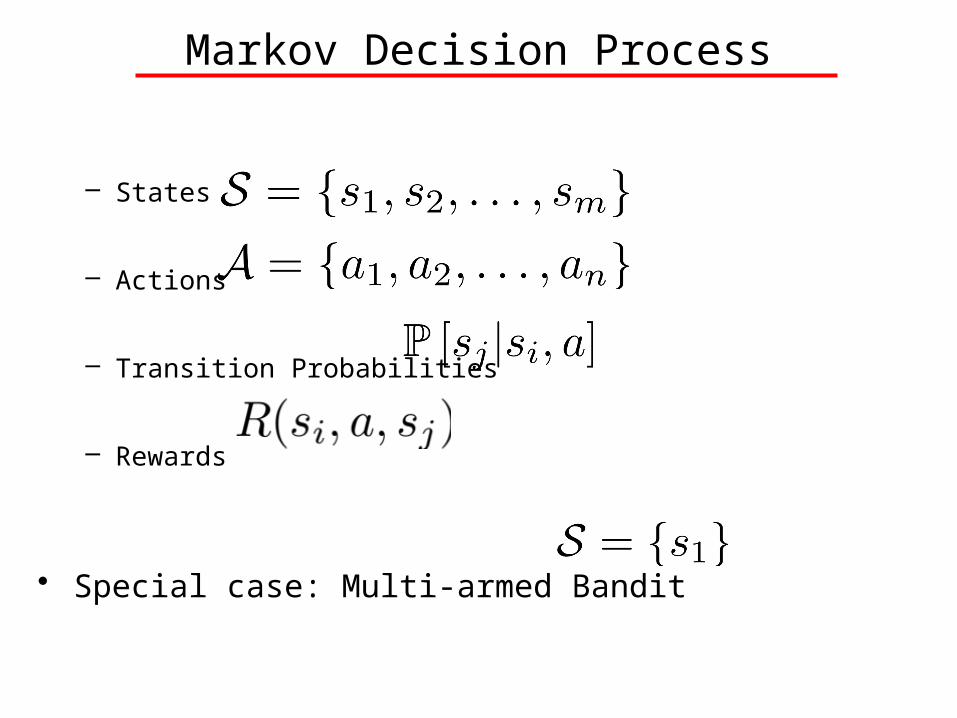
Markov Decision Process
– States
– Actions
– Transition Probabilities
– Rewards
• Special case: Multi-armed Bandit

Markov Decision Process
3 states, 2 actions
Source
: Wik
iped
ia
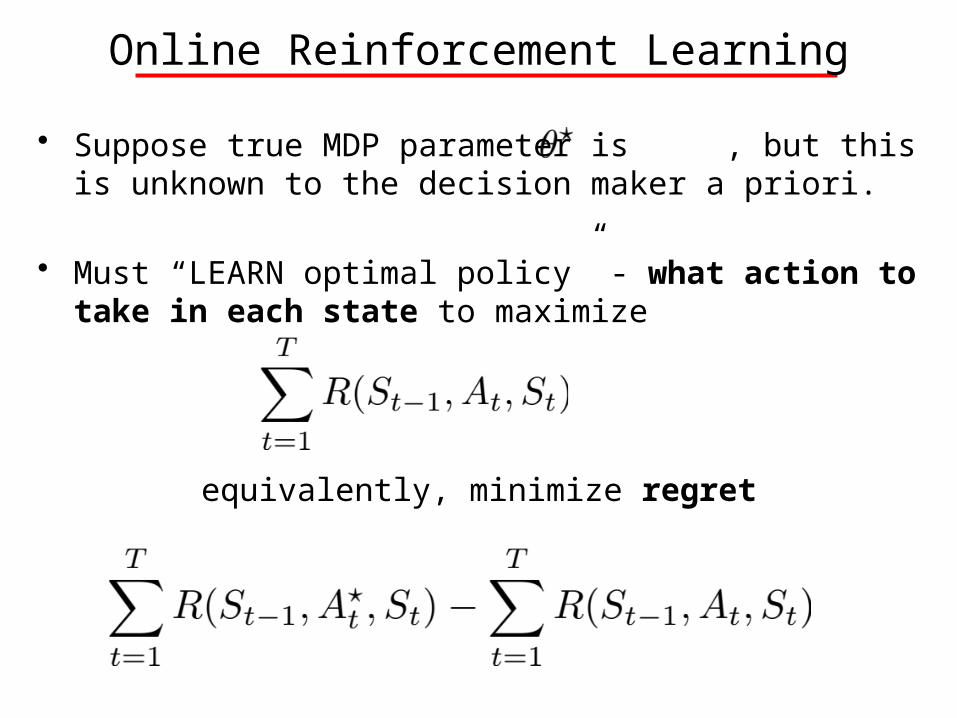
Online Reinforcement Learning
• Suppose true MDP parameter is , but this is unknown to the decision maker a priori.
• Must “LEARN optimal policy” - what action to take in each state to maximize
equivalently, minimize regret
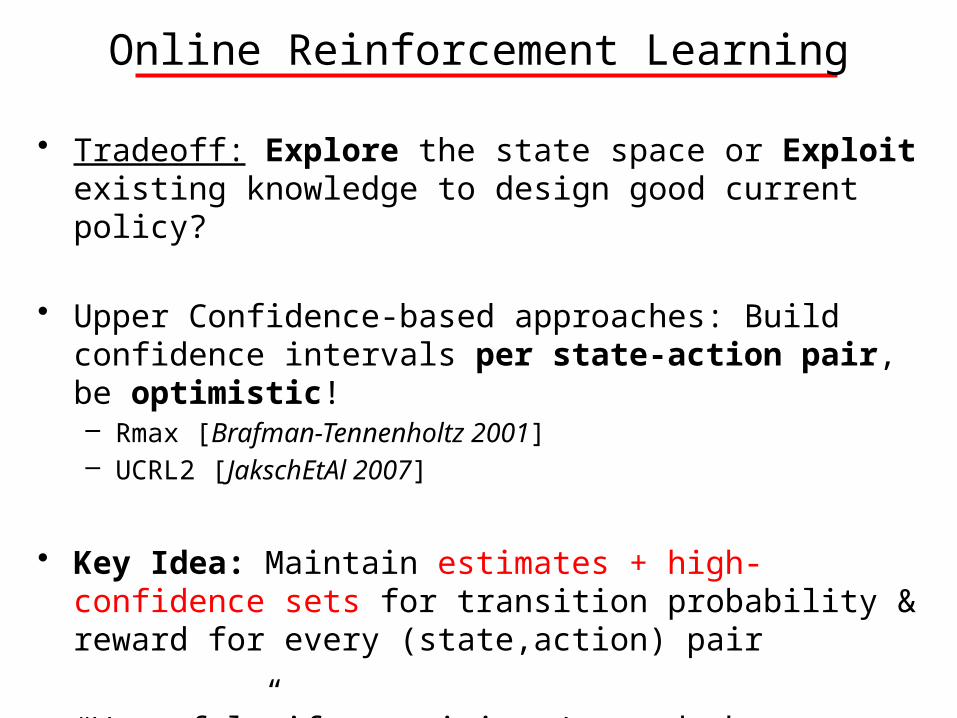
Online Reinforcement Learning
• Tradeoff: Explore the state space or Exploit existing knowledge to design good current policy?
• Upper Confidence-based approaches: Build confidence intervals per state-action pair, be optimistic!– Rmax [Brafman-Tennenholtz 2001]– UCRL2 [JakschEtAl 2007]
• Key Idea: Maintain estimates + high-confidence sets for transition probability & reward for every (state,action) pair
• “Wasteful” if transitions/rewards have structure/relations
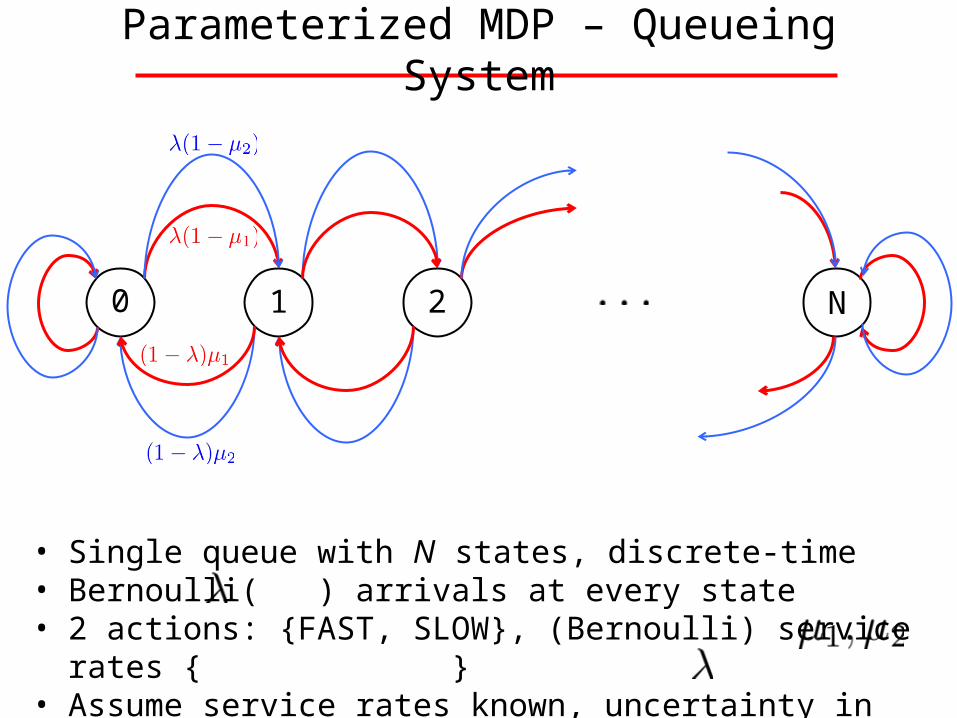
Parameterized MDP – Queueing System
0 1 2 N
• Single queue with N states, discrete-time• Bernoulli( ) arrivals at every state• 2 actions: {FAST, SLOW}, (Bernoulli) service rates { } • Assume service rates known, uncertainty in only

Thompson Sampling
1. Draw an MDP instance ~ Prior over possible MDPs
2. Compute optimal policy for instance (Value Iteration, Linear Programming, simulation, …)
3. Play action prescribed by optimal policy for current state
Repeat indefinitely.
In fact, consider the following variant (TSMDP):• Designate a marker state • Divide time into visits to marker state (epochs)• At each epoch
1. Sample an MDP ~ Curent posterior
2. Compute optimal policy for sampled MDP
3. Play policy until end of epoch
4. Update posterior using epoch samples

Numerics –Queueing System
Main Result
[G.-Mannor’15] Under suitably “nice” prior on , with probability at least (1 - ), TSMDP gives regret
B + C log(T)
in T rounds, where B depends on , and the prior, C depends only on , the true model and, more importantly, the “effective dimension” of .
• Implication: Provably rapid learning if effective dimensionality of MDP is small, e.g., queueing system with single scalar uncertain parameter

Future Directions
• Continuum-armed bandits?
• Risk-averse decision making
• Misspecified models (e.g., “almost-linear bandits”)
• Relax epoch structure? Relax ergodicity assumptions?
• Infinite State/Action Spaces
• Function Approximation for State/Policy Representations?
Thank you