Embed Size (px)
Citation preview

OPEN-LOOP SATELLITE LIBRATIONAL CONTROL IN
ELLIPTIC ORBITS THROUGH TETHER
K. KUMAR{ and K. D. KUMAR
Indian Institute of Technology, Department of Aerospace Engineering, Kanpur 208016, India
(Received 29 October 1996; revised version received 15 September 1997)
AbstractÐThe paper proposes the use of a bitethered pendulum mass deployed from satellite for open-loop satellite attitude control in elliptic orbits. A simple approximate analytical approach has beenadopted to develop control law governing moments generated through a judicious non-feedback schemeof tether length variation with a view to neutralize the adverse e�ect of the harmonic excitation inducedby eccentricity. The detailed simulation of the system response shows that the proposed control strategyenables much higher pointing accuracies for satellites in elliptic orbits, even with most adverse satellitemass distribution. The small auxiliary pendulum mass needed along with modest tether lengths makethe concept particularly attractive. # 1998 Elsevier Science Ltd. All rights reserved
1. NOMENCLATURE
a tether o�seta a/Lref
e orbital eccentricityl L/Lref
lj Lj/Lref
ljo Ljo/Lref
m mass of the auxiliary bodyxo, yo, zo co-ordinate axes in the local vertical frame (Fig. 1)x, y, z satellite body co-ordinate axes (Fig. 1)C EA/�mLrefO
2�Ce C(1ÿ e2)3
EA tether modulus of rigidityIii principal satellite moments of inertia about the i axis;
i= x,y,zIr satellite mass distribution parameter; (IyyÿIzz)/IxxL distance of pendulum from satellite [cm]Lo L for EEj=0Lj stretched tether lengthsLjo unstretched tether lengthsLref reference length; �Ixx=m�1=2U(EEj) 1 for EEjr0; 0 for EEj<0aa satellite pitch angle (Fig. 1)bb tether swing angle (Fig. 1)EEj strain in the jth tethermm Earth's gravitational constantyy true anomaly as measured from the reference lineOO average angular velocity(.)' d(.)/dyy(.)j (.) for jth tether; j = 1,2
2. INTRODUCTION
The advent of tethered satellite systems
(TSS) [1,2] marks the beginning of a new era inspace research. Several new space applications pro-posed for the TSS pose formidable challenges seek-
ing solution to various complex problems involved.Satellite attitude stabilization represents one such
important application. The earlier mechanismssuggested for achieving librational stability througha single tether±mass attachment were based on
feedback control of the control moment by regulat-ing tether tension or o�-sets alone, or in combi-nation with established active control devices.
Recently, the ®rst author [3] established the feasi-bility of utilizing a pair of identical tethers of equallength to deploy a small pendulum-like-auxiliarymass to ensure passive pointing stability. In a sub-
sequent paper, Kumar et al. [4] proposed the use ofthis TSS model to counter the destabilizinge�ects [5±7] of eccentricity as well as adverse mass
distribution. A detailed numerical attitude responsesimulation showed that it signi®cantly brings downthe librational amplitudes. However, the proposed
system su�ers from two major limitations. In gen-eral, these satellite systems require large tetherlengths on the order of 10 km. Furthermore, even
with these large lengths, the resulting amplitude oflibrational motion may be too large to be accepta-ble, especially in highly elliptic orbits. To circum-vent these di�culties, here, authors propose a
simple open-loop tether length control strategy topractically neutralize the e�ects of excitationinduced by orbital eccentricity. The study is in-
itiated with formulation of the governing equationsof motion for the proposed tether±satellite-systemmoving in an elliptic orbit.
3. FORMULATION
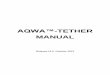
For the TSS under consideration (Fig. 1), a localcoordinate frame O-xoyozo is chosen such that theyo-axis always points along the local vertical, xo-axis lies normal to the plane of satellite motion and
Acta Astronautica Vol. 41, No. 1, pp. 15±21, 1997# 1998 Elsevier Science Ltd. All rights reserved
Printed in Great Britain0094-5765/98 $19.00+0.00PII: S0094-5765(97)00217-8
{Corresponding author. E-mail: [email protected].
15

the zo-axis is so directed as to complete the right-
handed triad. The corresponding principal body-
®xed coordinate frame is denoted by O-xyz. The
auxiliary ``pendulum-like'' subsatellite mass (m)
taken is much smaller than the satellite mass (M)
and is hence treated as a particle. The tethers made
of a light, but rigid, material like kevlar-49 are
assumed to have negligible mass. Consequently, the
transverse vibrations are ignored.
For exploring the open-loop satellite attitude con-
trol through tether, the case involving in-plane
angular motion has been investigated. The satellite
pitch-angle (a), the distance between the satellite
mass-center and the auxiliary mass (L), its associ-
ated in-plane swing angle (b) and the two tether
strains (E1 and E2) constitute the chosen set of the
generalized co-ordinates to describe the system. The
system obeys the following dimensionless geometric
constraints
lj � ljo�1� Ej �� fa2 � l2 � �ÿ1�j al � sin�aÿ b�g1=2; j � 1,2: �1�
The governing non-linear, non-autonomous
ordinary di�erential equations of motion obtainedusing Lagrangian formulation approach can bewritten as
�1� ecosy�a0ÿ2 esinya 0 ÿ 3Irsinacosaÿ 2esiny
�Cea��E2U�E2�=l2� ÿ �E1U�E1�=l1��
�l�1=�1� ecosy�3�cos�aÿ b� � 0, �2�
�1� ecosy�b0ÿ2esinyb 0 � 3sinbcosb
�2�1� ecosy��1� b 0��l 0=l � ÿ 2esiny
ÿCea��E2U�E2�=l2� ÿ �E1U�E1�=l1��
��1=l ��1=�1� ecosy�3�cos�aÿ b� � 0, �3�
Fig. 1. Geometry of satellite-tethered mass con®guration
Krishna Kumar and K. D. Kumar16

�1� ecosy�l0ÿ2esinyl 0 � �Cef�E1U�E1�=l1�
��E2U�E2�=l2�g�1=�1� ecosy�3�
ÿf�1� ecosy��1� b 0�2 ÿ �1ÿ 3cos2b�g�l�Cea��E2U�E2�=l2� ÿ �E1U�E1�=l1��
��1=�1� ecosy�3�sin�aÿ b� � 0: �4�
4. SYNTHESIS OF OPEN-LOOP CONTROL LAW USING
APPROXIMATE ANALYTICAL APPROACH
The satellites moving in elliptic orbits do not pos-
sess a ®xed attitude equilibrium con®guration.
Furthermore, the amplitude of pitching oscillations
rapidly increases with increase in ellipticity. With a
view to overcome this adverse e�ect, Joshi and
Kumar [8] earlier used an approximate analytical
approach that led to the development of control
law for regulating the movement of solar surfaces
in order to generate the solar radiation pressure
control torque. A similar approach is adapted here
to develop a suitable tether length control strategy.
This, however, requires a clear understanding of the
mechanism of excitation induced by eccentricity.
For this purpose, the above complex non-linear and
non-autonomous system is ®rst simpli®ed by mak-
ing use of some reasonable assumptions. In thepractical situation of small amplitude librations and
low eccentricities, ignoring the second- and higher-
order terms in a, b and e, the ®rst two governing
equations simplify to:
Fig. 2. Typical comparison between uncontrolled and controlled librational response for e= 0.03 andIr=0.94 without disturbance
Satellite librational control 17

a0ÿ 3Ira � 2esinyÿ Cea��E2=l2� ÿ �E1=l1��l, �5�
b0� 3b � 2esiny� Cea��E2=l2� ÿ �E1=l1���1=l �: �6�
On substituting the expression for the term [(E2/l2)ÿ (E1/l1)] obtained from the constraint relations
eqn (1) in the form
��E2=l2� ÿ �E1=l1�� ���1=l20� ÿ �1=l10�� ÿ ��1=l2� ÿ �1=l1����ll0 ÿ l20�=l20 � 2a=l20�aÿ b� �7�
into eqns (5) and (6), we get
a0��ÿ3Ir � 2Ca2=l0�a� 2esinyÿ Ceaf�l10 ÿ l20�=l0 ÿ 2ba=l0g, �8�
b0� 3b �2esiny� Ceaf�l10 ÿ l20�=l30� 2a�aÿ b�=l30g: �9�
It may be recognized that the deterioration of the
librational response in eccentric orbits may be
chie¯y attributed to the periodic excitation term 2e
siny. An attempt is, therefore, made to devise a
suitable tether length control strategy in order to
neutralize this unwanted periodic excitation. A close
examination of the governing simpli®ed approxi-
mate eqn (8) suggests that it may be mathematically
possible if the last term representing tether moment
is forced to vary so as to always neutralize the exci-
tation 2e siny. In other words, it would be desirable
Fig. 3. Typical comparison between uncontrolled and controlled librational response for e = 0.03 inpresence of initial disturbance
Krishna Kumar and K. D. Kumar18

to plan a control strategy that would ensure
Ceaf�l10 ÿ l20�=l0 ÿ 2ba=l0g � 2esiny: �10�Using this in eqn (9), we get
b0� 3b � 2e�1� 1=l20�siny� 2Cea2a=l30: �11�
Ignoring the satellite pitching angle for the intended
stabilized satellite con®guration a = 0, we get the
particular solution for the b-equation given by
b � e�1� 1=l20�siny: �12�Substituting the value of b in eqn (10), we get the
following desired tether length variations:
l20 ÿ l10 � ÿ2aesinyf�1� 1=l20� � l0=�Cea2�g: �13�
For practical situations involving relatively large
values of parameter C and hence Ce used here, the
above relation approximately simpli®es to
l20 ÿ l10 � ÿ2ae�1� 1=l20�siny: �14�In corresponding dimensional form, it can be writ-ten as
L20 ÿ L10 � ÿ2ae�1� Ixx=�mL20��siny: �15�
Thus, for a speci®c chosen tether length L10, the
other tether length variation is governed by theabove relation. It may be pointed out that the
pitching moment caused by di�erential changes intether tension is merely a result of drift in satellite
pitching orientation from its desired con®guration.In contrast, the controlled variations in nominaltether length as discussed above and the resulting
tether pitch variations e�ectively eliminate the har-
Fig. 4. Typical comparison between uncontrolled and controlled librational response for e= 0.1 andIr=0.94 without disturbance
Satellite librational control 19

monic satellite pitching excitation induced by orbi-tal eccentricity. Needless to say, smaller the value of
e, more rigorous is expected to be this neutraliz-ation.
5. RESULTS AND DISCUSSION
With a view to assess the e�ectiveness of the pro-posed attitude control scheme, the detailed system
response is numerically simulated. For this purpose,the following data are assumed:
Major axis: 13 240 km leading to O= 1.17� 10ÿ3 rad/sModulus of rigidity for Kevlar-49, 1 mm dia. tether:EA = 1.06� 105 N
Auxiliary mass: m = 150 kgSatellite principal moments of inertia:Ixx � Iyy � 107 kg m2 and Izz � 6� 105 kg m2
The values for the corresponding dimensionless par-
ameters C and Ir are:
C � 1:7� 106;Ir � 0:94
However, if the satellite be positioned with its long
axis along the local vertical (instead of the local
horizontal direction considered here), the Ir would
take the value ÿ0.94.Figure 2 shows the dynamic response of TSS
with nominal tether lengths of 500 m for an orbital
eccentricity of 0.03. The uncontrolled system atti-tude response is found to be unstable. However,
with the proposed open-loop tether length control
strategy, the system response not only becomes
stable, but also has a rather low amplitude of oscil-
lations. The same general trends are observed for
Fig. 5. System plot showing the in¯uence of various design parameters on librational response withopen-loop control of tether length L20
Krishna Kumar and K. D. Kumar20

librational motion in the presence of initial disturb-ances (Fig. 3).
The proposed open-loop control with larger nom-inal tether lengths enables satellite pointing stabilityfor higher eccentricities as shown in Fig. 4. Here,
for e= 0.1, the tether length of 2 km is found to beadequate to ensure stability. On the contrary, if thetether length L20 was not varied and kept the same
as L10, the dynamic response is found to be un-stable.With a view to assess the system behavior over a
wide range of design parameters, the responseresults have been summarized as system plots(Fig. 5). These present the e�ects of changes inorbital eccentricity, tether length L10, the mass dis-
tribution parameter Ir, and tether o�set a on maxi-mum librational amplitudes. An increase ineccentricity leads to enhanced tether length require-
ments, as expected. For a particular tether lengthconsidered, the amplitude of oscillations increaseswith eccentricity. For low eccentricities, the system
response behavior remains practically insensitive tothe satellite mass distribution. Thus, the proposedmechanism enables satellite pointing stability even
for relatively large eccentricities and in the presenceof most adverse mass distribution. Finally, asexpected, the maximum possible tether o�setsappear to be desirable to ensure minimum libra-
tional amplitudes of motion.
6. CONCLUDING REMARKS
Some of the important features of the analysisand results may be summarized as follows:
1. The uncontrolled dynamic response for the pro-posed TSS in elliptic orbits is relatively poor. Ingeneral, large tether lengths may be required for
satellites pointing stability in highly ellipticorbits.
2. The open-loop control law developed here usingapproximate analytical approach seeks to make
use of the tether moment to eliminate the majorexcitation caused by eccentricity normally re-sponsible for deterioration of the attitude control
characteristics of the conventional methods. Thisis facilitated by varying the length of one of thetwo tethers while the nominal length of the other
remains unaltered. The variation is harmonicwith a period equal to that of the orbit andamplitude on the order of a meter.
3. The proposed open-loop control strategy enablesmuch higher pointing accuracies for satellites in
elliptic orbits even with most adverse satellitemass distributions.
4. The proposed open-loop control strategy not
only signi®cantly brings down the tether lengthrequirements for pointing stability, but alsoensures much greater attitude precision for satel-
lites in elliptic orbits.5. The system plots presented here summarize the
satellite librational response characteristics over
a wide range of design parameters. These facili-tate a judicious choice of the various system par-ameters for preliminary design purposes.
6. Simplicity of the proposed controller con®gur-
ation and ease of its operation make it particu-larly attractive for several satellite applicationsrequiring modest attitude accuracies.
7. The inherent presence of structural damping,ignored in the present investigation, is likely tointroduce some damping to the pitching oscil-
lations and thus lead to further improvement inthe system attitude response characteristics.
REFERENCES
1. Misra, A. K. and Modi, V. J. A survey on thedynamics and control of tethered satellite systems.Advances in the Astronautical Sciences, 1986, 62, 667±719.
2. Penzo, P. A. and Ammann, P. W. Tethers in SpaceHandbook, 2nd edn. NASA Publications, Washington,DC (1989).
3. Kumar, K. Satellite attitude stabilization throughtether. Acta Astronautica, 1995, 35, 385±390.
4. Kumar, K. Khosla, A. and Chaudhary, K. Tether assatellite attitude stabilizer in elliptic orbits: a novelconcept, Paper No. AAS 93-735, Presented at theAAS/AIAA Astrodynamics Specialists Conference,Victoria, BC (1993) [also in Advances in theAstronautical Sciences, 85 (1994)].
5. Shrivastava, S. K. and Modi, V. J. Satellite attitudedynamics and control in the presence of environmentaltorques a brief survey. Journal of Guidance Control,1983, 6, 461±469.
6. Kumar, K. Satellite librational dynamics and control;an overview. Journal of the Institution of Engineers,India, 1985, 66, 1±7.
7. Modi, V. J. Spacecraft attitude dynamics: evolutionand current challenges. Acta Astronautica, 1990, 21,689±718.
8. Joshi, V. K. and Kumar, K. New solar attitude con-trol approach for satellites in elliptic orbits. Journal ofGuidance Control, 1980, 3, 42±47.
Satellite librational control 21









![Tether anthony[1]](https://img.pdfslide.net/doc/110x75/557c7d36d8b42a494c8b5161/tether-anthony1.jpg)