Embed Size (px)
Citation preview

Optimal Control Framework for a Centralized
Approach to Separation Management
Leif Walter1 and Ekaterina Kostina2
Philipps-University, 35037 Marburg, Germany
Matthias Poppe3
DFS Deutsche Flugsicherung GmbH, 63225 Langen, Germany
One key element of future Air Traffic Management concepts are automation tools that
help to separate aircraft from one another in a tactical environment. This paper is
devoted to capabilities of a centralized approach to separation or conflict manage-
ment, based on optimal control and its applications. We present an optimal control
framework that generates conflict-free trajectories for all aircraft within a regarded
airspace. The optimization process is based on the direct solution method for optimal
control problems and uses multiple shooting discretization with an SQP method to
solve the resulting nonlinear problem. Numerical computations are performed with
the MUSCOD-II software (IWR, University of Heidelberg). The principle advantage
of a centralized approach is that the optimal control framework consider complete in-
formation of the traffic situation in an airspace volume, thus it generates solutions that
incorporate information of all airspace users simultaneously. This prevents solutions
that could otherwise yield even more severe situations later in time. As an optimality
measure we use a performance index that aims to assess the deviation from a nominal
flight trajectory as filed by the user. Numerical experiments show that compared to
human solutions, the method proposed in this paper yields a significant decrease of
delay and flight track excess, as well as fuel savings of approximately 5%.
1 Optimization Workgroup, Faculty of Mathematics and Computer Science2 Head of Optimization Workgroup, Faculty of Mathematics and Computer Science3 Research & Development Department
1
I. Introduction
With the increase in demand and capacity, Air Traffic Management (ATM) will face further
challenges to keep delay considerably low while increasing safety standards at a cheaper cost. When
addressing these challenges imposed by future ATM programs (SESAR, NextGen), controllers will
need sophisticated decision support tools to deal with upcoming traffic flows in an efficient way.
As it was pointed out in the Performance Review Report 2010, [12], 5 % of all flights in Europe
are held on the ground to manage en-route congestion, resulting in more than 50 % of all delay
minutes within the system.
In the future, air navigation service providers (ANSPs) will need to deliver more capacity,
in a cheaper, safer, and environmental-friendlier way. This goal will not be achieved without the aid
of sophisticated and automated tools that will assist the human air traffic controller (ATCO). One
of the air traffic management fields that can contribute to provide to future capacity is separation
management. In the context of this paper, separation management is the task of separating aircraft
in an allocated airspace volume as efficiently as possible.
The aim of this paper is to present the application of optimal control theory in a central-
ized approach to separation management, where we use information of the current traffic situation
in a sector to derive an optimal control problem. The solution of this control problem consecutively
provide conflict-free trajectories for all users within the regarded airspace. Solutions are obtained
by using a direct method that is composed of multiple shooting discretization and a sequential
quadratic programming (SQP) method to solve the resulting nonlinear optimization problem.
This approach shows very promising results when applied to centralized separation manage-
ment. Numerical results are validated using real-time simulations performed at the Deutsche
Flugsicherung GmbH (DFS) research & development department. These trials demonstrate that
2
the optimal control framework proposed by the authors is able to deliver conflict solutions that
yield shorter track lengths, hence leading to a fuel saving of approximately up to 5%.
The paper is organized as follows. In Section II, we derive an optimal control problem by
using information on the current traffic situation and sketch the principles of the numerical method
used to solve the resulting optimal control problem. Numerical experiments using two scenarios
are discussed in Section III. Discussion and evaluation of the results are presented in Section IV.
II. Optimal Control Problem for Separation Management
In general, optimal control is applied to obtain control trajectories that will drive a dynamic
system from its initial state to its final state in an optimal way. Common applications include
processes in chemical industry, aerospace engineering or vehicle control. While optimization
methods are generally often used to engage challenges in ATM, as in [13], [7], [1], and [10], the
application of optimal control to separation management is still not a common approach. To our
knowledge, this paper is the first trial to formulate and to solve separation management problems
as optimal control problems.
In this Section, we first derive a generic problem formulation that can be used to formulate a control
problem for any traffic situation. The system dynamics (i.e. its propagator) is given by the aircraft
motions through airspace. Control inputs are the aircraft’s velocity and its bank angle. Terminal
conditions for initial and final states are determined by the aircraft’s entry point and its desired
destination. Separation minima are naturally formulated as path conditions, control constraints
incorporate information about individual aircraft capabilities. As we will see later, a suitable
formulation of the objective function is less straightforward than the formulation of the previous
items. In this approach, we want to minimize the total impact on the aircraft, so that an optimal
conflict resolution will be done with as less effort as necessary. The aim of the optimization is to
obtain control trajectories for all aircrafts’ velocity and bank angle. These control trajectories will
then ultimately result in optimal flight trajectories for each aircraft. Note that in this approach,
trajectories are optimized from a holistic, i.e. centralized, point of view.
3

A. Optimal Control Problem
The system of ordinary differential equations for the numerical examples that are studied in
Section III is chosen to represent the BADA (Base of Aircraft Data, [6]) model that is used within
the AFS (Advanced Function Simulator by DFS) real-time simulations. Since we only inspect 2-
dimensional en-route scenarios without level changes, the dynamic model is simplified to:
θi(t) =g
Vi(t)tan(µi(t)),
xi(t) = Vi(t) cos(θi(t)), (1)
yi(t) = Vi(t) sin(θi(t)), t ∈ [0, pi]
for each aircraft i = 1, 2, . . . ,m, where m is the total number of aircrafts. Here θi(t) is the aircraft
heading, Vi(t) is the true airspeed, µi(t) is the bank angle, xi(t) is the lateral and yi(t) is the
longitudinal positions. Control functions are the aircraft velocity and its bank angle, which means
ui0(t) := µi(t) and ui
1(t) := Vi(t). Each aircraft i spents time pi in the regarded airspace. Since
these times may be different for different aircrafts we apply time transormation of the time intervals
[t0, pi] into a fixed time interval [0, 1], include free end times pi as additional parameters into the
model and reformulate (1) as
θi(t) = pi g
Vi(t)tan(µi(t)),
xi(t) = piVi(t) cos(θi(t)),
yi(t) = piVi(t) sin(θi(t)), t ∈ [0, 1].
With the notations
u(t) =(u1
0(t), . . . , um0 (t), u1
1(t), . . . , um1 (t)
)T ∈ R2m,
ω(t) = (θ1(t), x1(t), y1(t), . . . , θm(t), xm(t), ym(t))T ∈ R3m,
p =(p1, . . . , pm
)T ∈ Rm,
f(ω(t), u(t), p) =(p1 g
V1(t)tan(µ1(t)), p1V1(t) cos(θ1(t)), p1V1(t) sin(θ1(t)), . . . ,
pm g
Vm(t)tan(µm(t)), pmVm(t) cos(θm(t)), pmVm(t) sin(θm(t))
)T
4

the whole traffic situation can be formally described by the following system
ω(t) = f(ω(t), u(t), p), t ∈ [0, 1].
We assume that the traffic situation at the initial time t = 0 is known, e.g. either from radar
tracking or FMS (Flight Management System) downlink:
θi(0) = θi0, x
i(0) = xi0, y
i(0) = yi0, i = 1, ...,m.
Further we assume that the nominal heading θi0 is the direct heading between entry and exit point.
For the sake of simplicity, we assume direct routes from entry to exit point. One could define more
complex routes throughout the sector without having to modify the general approach. The initial
conditions are summarized as ω(0) = ω0. The desired state at the final time t = 1 can be formulated
as a terminal condition ω(1) = ω1. Depending on the actual traffic scenario, ω1 contains information
about the corresponding exit point of the aircraft, i.e. information about the positions xi(1) and
yi(1), i=1, ..., m, or any other condition that needs to be imposed to the aircraft (e.g. heading or
velocity). Furthermore, we require that when the aircraft leaves the regarded airspace, it will do so
with the nominal velocity and in level flight, i.e. ui0(1) = 0, ui
1(1) = ui1(0), where ui
1(0) corresponds
with the aircraft nominal velocity when entering the airspace volume. The initial and terminal
constraints are formally summarized in
re(ω(0), ω(1), u(0), u(1)) = 0.
In order to ensure minimum separation, i.e. to ensure that the distance between each two
aircrafts i and j at any time does not fall below a given value, we introduce path constraints
hω(i,j)(ω(t)) =
√(xi − xj)2 + (yi − yj)2 − ξ ≥ 0,
for each pair (i, j) of aircrafts. Here, ξ is the separation minimum with typical value of 5 nautical
miles (NM). Since in direct optimal control methods the adherence of path constraints is only
5

guaranteed at grid nodes, for real-world applications it is mandatory to choose ξ accordingly, so
that the actual minimum separation is never violated. A study at Deutsche Flugsicherung has
shown that human controllers usually aim for higher separation minimum of approximatly 7.5
NM, see [5]. This is done to compensate for possible inaccuracies in terms of data and automated
or human trajectory projection. For these reasons, and because adherence to path constraints
can only be guaranteed at grid nodes, we have performed numerical experiments not only for the
typical separation minimum of 5 NM, but also for a conservative value of 7.5 NM.
Control constraints are given by the aircraft performance capabilities in terms of velocity
and bank angle. For every aircraft i, feasible values for its controls ui0(t) and ui
1(t) are bounded by
some minimum and maximum values. In our model these bounds are again chosen according to
the AFS and BADA model. According to the BADA manual, [6], the bank angle for each aircraft i
in en-route flight phases is restricted to be below 35
−35 ≤ µi(t) = ui0(t) ≤ 35.
The aircraft velocity is bounded by its performance capabilities and depends on the actual aircraft
type. Typical values can be found in [15]. In general, the velocity bounds are given by
V imin ≤ ui
1(t) ≤ V imax.
Summing up, the control vector u(t) is bounded by umin ≤ u(t) ≤ umax. The complete set of path
and control constraints can be formally written as follows:
h(ω(t), u(t)) =
(hω
(i,j)(ω(t)))i,j=1,...,m
u(t)− umin
−u(t) + umax
≥ 0, t ∈ [0, 1].
Now let us model the objective functional. Formulation of the objective functional is not a
straightforward task. A comprehensive discussion on this important topic can be found in [15]. In
this paper we present one possible choice for the objective functional.
6

First we wish to minimize the difference between the actual time pi that the aircraft i spends
within the sector and its nominal sector transit time pi, i.e. the time that is computed from the
aircraft nominal state trajectory and its nominal velocity
ψ(p) =m∑
i=1
√(pi − pi)2. (2)
As a second optimality measure, we wish to minimize the total deviation of actual velocity and the
aircraft nominal velocity, as well as the total bank angle flown. Recalling from above that ui0(t) is
the bank angle and ui1(t) the velocity, we may define
Li1(ui
0(t)) = (ui0(t))2, Li
2(ui1(t)) = ‖ui
1(t)− V i(t)‖, i = 1, ...,m.
By integrating over the whole time horizon, we obtain the Lagrange term of the objective functional
∫ 1
0
L(α, u(t))dt =∫ 1
0
m∑i=1
[α1Li1(u(t)) + α2L
i2(u(t))]dt, (3)
where α = (α1, α2)T are weights assigned to the different terms within the objective function. Using
(2) and (3), we finally may write the performance index as
J(u(·), p) :=∫ 1
0
L(α, u(t))dt+ βψ(p), (4)
with β being an additional weight. Note that the individual aims in (4) may be in conflict. The
magnitude of control instructions will, of course, also influence the sector transit time. Nevertheless,
the solution of conflicts must be performed in a way that alters the aircraft nominal route — so that
in fact we are looking for a trade-off between control magnitude and resulting delay. Furthermore,
we need to introduce weights to scale objective components of different magnitudes (e.g. bank
angle in radians and sector transit times in seconds).
In [15], the influence of different weight sets is investigated. In this paper, we present results of
numerical studies using two sets of weights, Set A and Set B (see Table 1), which have shown
the most promising and most interesting results. Since the implementation of sector transit time
adherence corresponds to a more progressive solution method (Set B), it was decided to couple Set
B with a minimum separation of 5 NM. Set A on the other hand represents a more conservative
7

Set A Set B
β (Weighting of sector time) 0 10
α1 (Weighting of cruise speed) 100 100
α2 (Weighting of bank angle) 100 100
ξ (Minimum separation) 7.5 5.0
Table 1 Weight sets and minimum separation values
solution, which is why it was assigned with a minimum separation of 7.5 NM.
From all the considerations above, we may now formulate the problem of separation management
in a standard form of control problems as follows:
minu(·),ω(·),p
J(u(·), p) =∫ 1
0
αL(ω(t), u(t))dt+ βψ(p), (5)
s.t. ω(t)− f(ω(t), u(t), p) = 0, t ∈ [0, 1],
h(ω(t), u(t)) ≥ 0, t ∈ [0, 1],
re(ω(0), u(0), ω(1), u(1)) = 0.
B. Direct Solution Method
Problems in the form of (5) can be solved by the so-called direct method as described in [2–4] and
[11]. Here, we only provide a sketch of the general approach of direct methods. First, we discretize
control functions on the time grid
0 = τ0 < τ1 < · · · < τM = 1,
using local base functions, e.g. piecewise polynomial functions with local support
u(t)|Ii = ϕi(t, wi) , wi ∈ Rnwi , Ii = [τi, τi+1].
Next, the dynamical model is discretized using e.g. multiple shooting approach: we choose the initial
values ω(τi) = si, i = 0, . . . ,M − 1, at multiple shooting nodes and solve initial value problems
ω = f(ω(t), ϕi(t, wi), p), ω(τi) = si, t ∈ Ii,
8

resulting in the trajectories ω(t; si, wi, p), t ∈ Ii, i = 0, ...,M − 1. The continuity of the optimal
trajectory is ensured by the following constraints
ω(τi+1; si, wi, p)− si+1 = 0 , i = 0, . . . ,M − 1,
which are included into optimization problem. Furthermore, we discretize the cost functional and
path, as well as control constraints accordingly.
As a result, the optimal control problem is transformed as a finite-dimensional optimization
problem that can be written in the form
minxf(x), s.t. g(x) = 0, c(x) ≥ 0,
where the variables x include s0, w0, . . . , sM−1, wM−1, sM , p. These finite-dimensional optimization
problems are typically adressed by descent algorithms as described in [9].
Here, we chose to solve the problem using the sequential quadratic programming method (SQP)
according to which the new iteration is computed by
xk+1 = xk + tk∆xk,
where the increment ∆xk solves the quadratic problem
min∆x∈Ωk
12
∆xTHk∆x+∇f(xk)T ∆x
g(xk) +∇g(xk)T ∆x = 0, c(xk) +∇c(xk)T ∆x ≥ 0,
where Hk approximates the Hessian of the Langrange function at the current iteration. More
details on the SQP method can be found in [9]. The SQP algorithm itself can be adapted by
choosing different strategies for approximating the Hessian of the Lagrangian, and by choosing a
globalization technique. In the numerical experiments of this paper we have used the software
package MUSCOD-II, where the SQP module has been configured to use a BFGS update on the
Hessian approximation of the the Langrange function, as well as a VMCWD (Variable Metric
Constrained WatchDog) technique to determine the step length, see [14].
9
III. Numerical Experiments: Scenarios
In order to test the proposed approach to separation management six traffic scenarios have been
investigated in [15]. Due to lack of place we present the detailed results of two scenarios, namely
scenarios B and E, that proved to be the most interesting. In all scenarios we consider a synthetic
sector of 100 NM × 100 NM on a flight altitude of 35000 Ft, which is typical for en-route flight
phase. Each scenario involves four aircrafts thus having higher-order conflicts.
For each scenario, we compare the numerical solutions obtained by the optimal control procedure
with the solutions obtained by human Air Traffic Controllers (ATCO). The comparison is performed
in terms of delays, flight tracks and magnitude of clearances. For the sake of clarity, human ATCO
solutions are presented as average values. As mentioned above, we present two numerical solutions
for each scenario: a conservative solution (Cons), not considering a deviation in sector transit time
and using a separation minimum of 7.5 NM — and a more progressive solution (Pro), also aiming
for an exact match in sector transit time and using a separation minimum of 5 NM. The values of
the weights and setups for numerical solutions are presented in Table 1, Set A for a conservative
and Set B for a progressive solution.
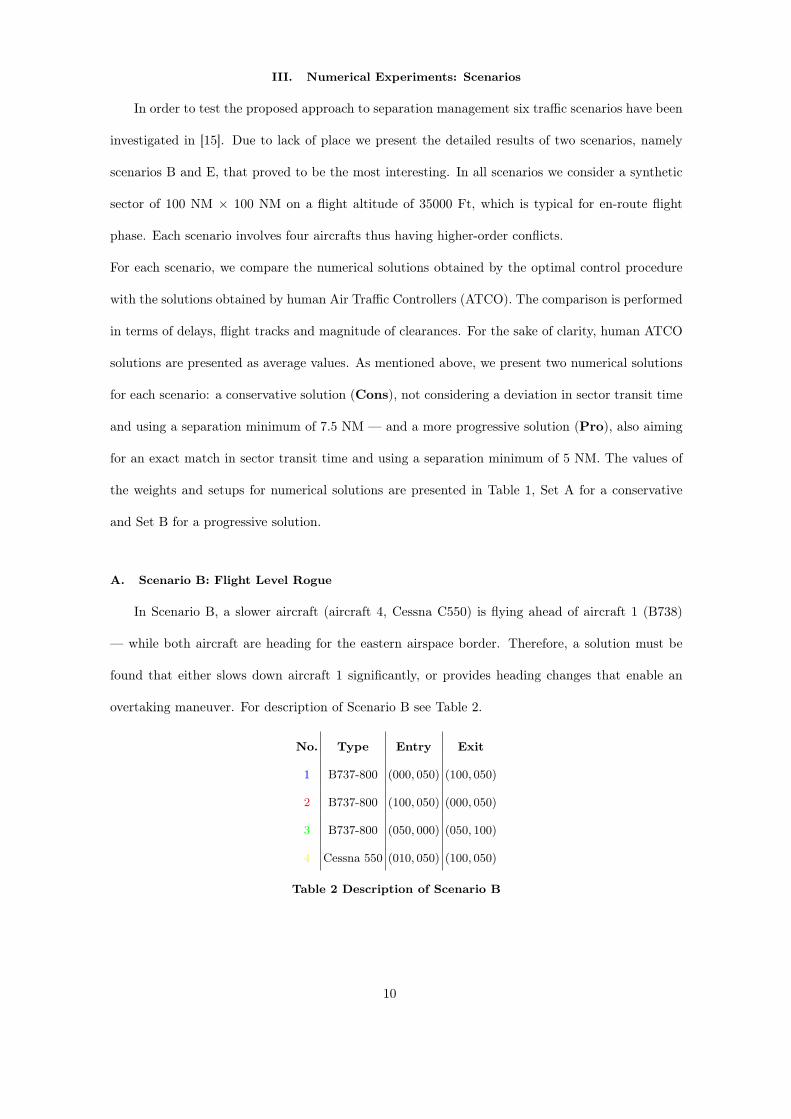
A. Scenario B: Flight Level Rogue
In Scenario B, a slower aircraft (aircraft 4, Cessna C550) is flying ahead of aircraft 1 (B738)
— while both aircraft are heading for the eastern airspace border. Therefore, a solution must be
found that either slows down aircraft 1 significantly, or provides heading changes that enable an
overtaking maneuver. For description of Scenario B see Table 2.
No. Type Entry Exit
1 B737-800 (000, 050) (100, 050)
2 B737-800 (100, 050) (000, 050)
3 B737-800 (050, 000) (050, 100)
4 Cessna 550 (010, 050) (100, 050)
Table 2 Description of Scenario B
10
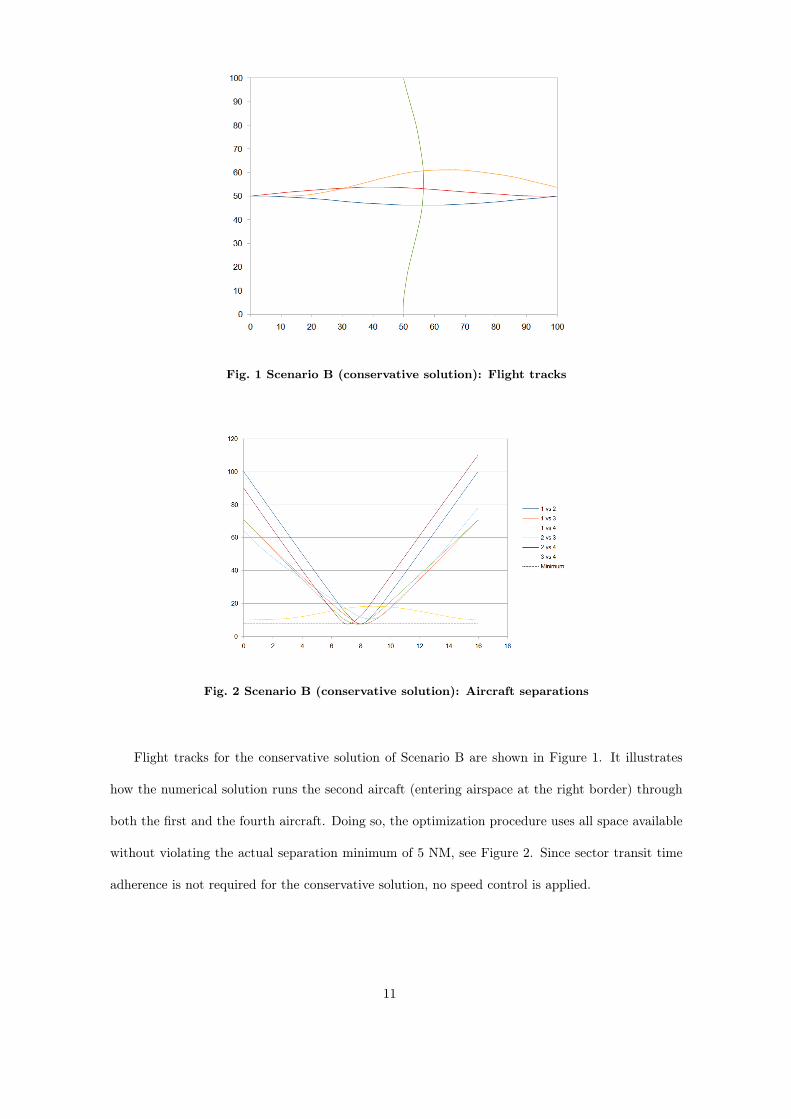
Fig. 1 Scenario B (conservative solution): Flight tracks
Fig. 2 Scenario B (conservative solution): Aircraft separations
Flight tracks for the conservative solution of Scenario B are shown in Figure 1. It illustrates
how the numerical solution runs the second aircaft (entering airspace at the right border) through
both the first and the fourth aircraft. Doing so, the optimization procedure uses all space available
without violating the actual separation minimum of 5 NM, see Figure 2. Since sector transit time
adherence is not required for the conservative solution, no speed control is applied.
11
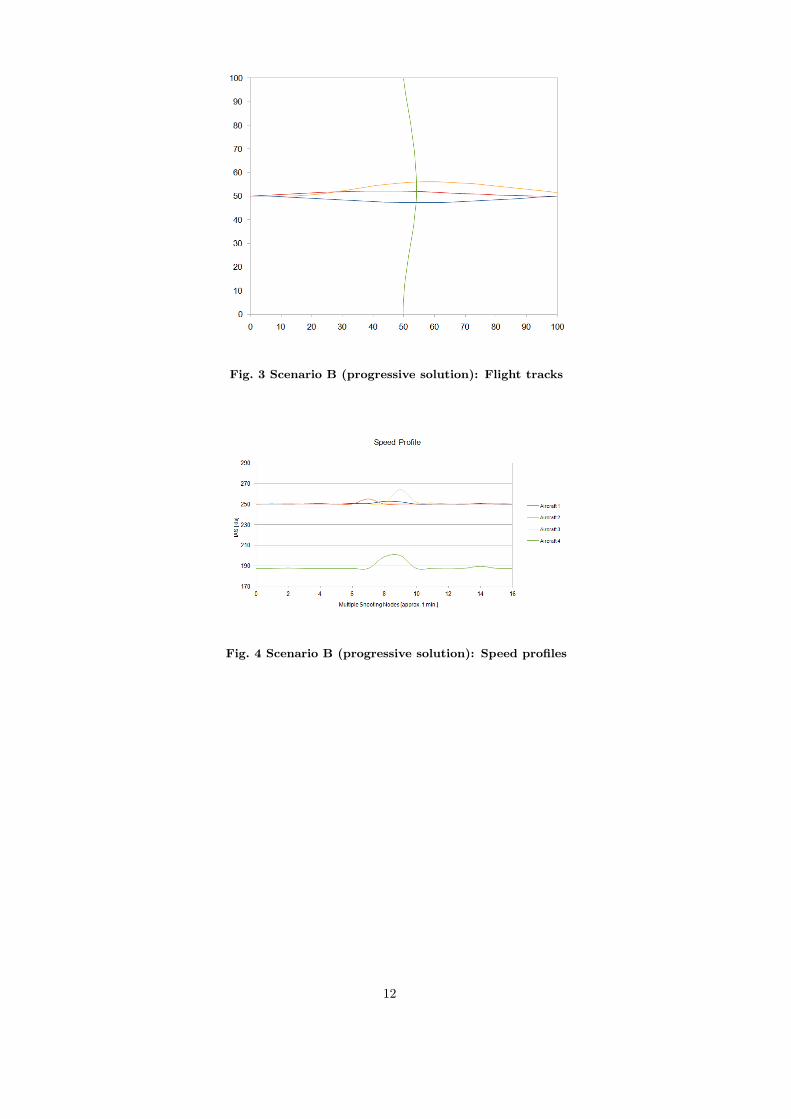
Fig. 3 Scenario B (progressive solution): Flight tracks
Fig. 4 Scenario B (progressive solution): Speed profiles
12
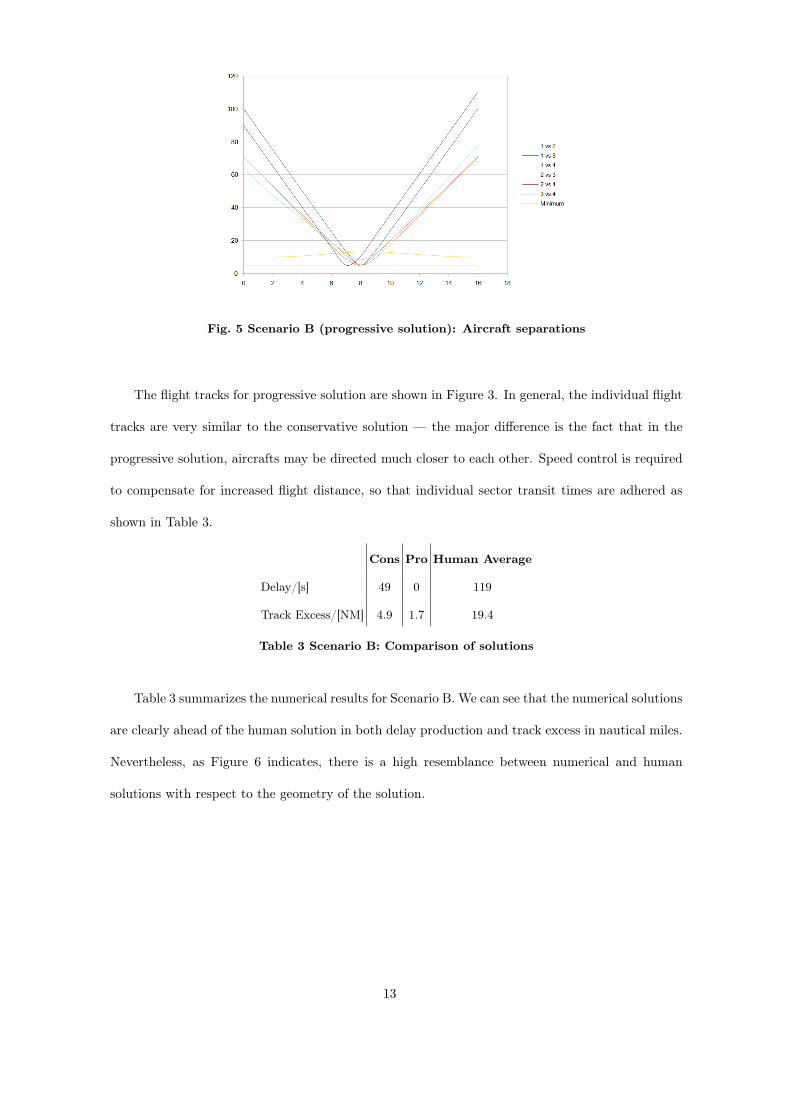
Fig. 5 Scenario B (progressive solution): Aircraft separations
The flight tracks for progressive solution are shown in Figure 3. In general, the individual flight
tracks are very similar to the conservative solution — the major difference is the fact that in the
progressive solution, aircrafts may be directed much closer to each other. Speed control is required
to compensate for increased flight distance, so that individual sector transit times are adhered as
shown in Table 3.
Cons Pro Human Average
Delay/[s] 49 0 119
Track Excess/[NM] 4.9 1.7 19.4
Table 3 Scenario B: Comparison of solutions
Table 3 summarizes the numerical results for Scenario B. We can see that the numerical solutions
are clearly ahead of the human solution in both delay production and track excess in nautical miles.
Nevertheless, as Figure 6 indicates, there is a high resemblance between numerical and human
solutions with respect to the geometry of the solution.
13
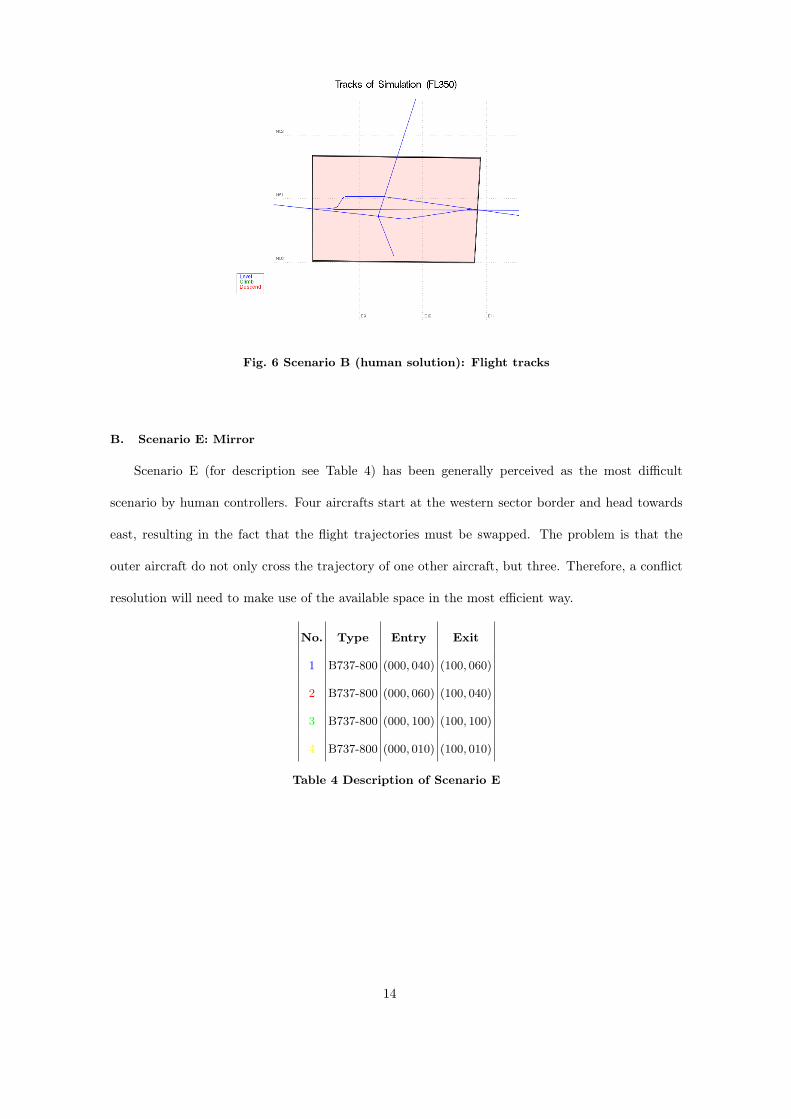
Fig. 6 Scenario B (human solution): Flight tracks
B. Scenario E: Mirror
Scenario E (for description see Table 4) has been generally perceived as the most difficult
scenario by human controllers. Four aircrafts start at the western sector border and head towards
east, resulting in the fact that the flight trajectories must be swapped. The problem is that the
outer aircraft do not only cross the trajectory of one other aircraft, but three. Therefore, a conflict
resolution will need to make use of the available space in the most efficient way.
No. Type Entry Exit
1 B737-800 (000, 040) (100, 060)
2 B737-800 (000, 060) (100, 040)
3 B737-800 (000, 100) (100, 100)
4 B737-800 (000, 010) (100, 010)
Table 4 Description of Scenario E
14
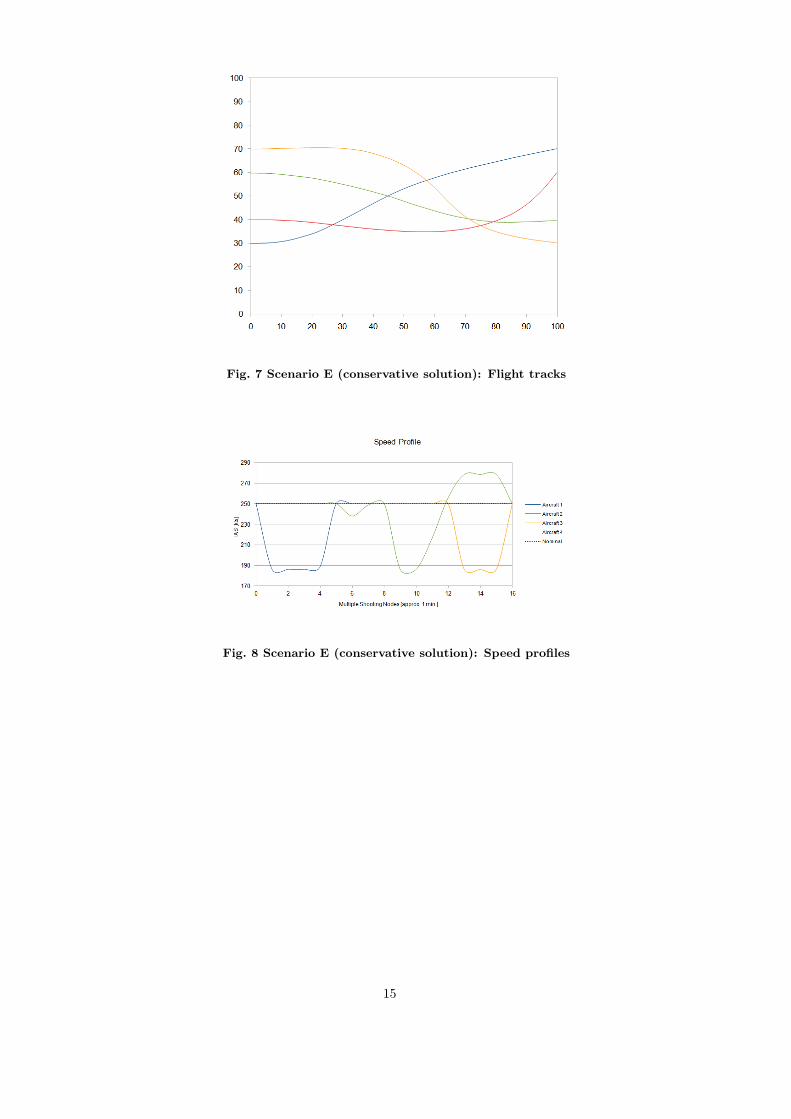
Fig. 7 Scenario E (conservative solution): Flight tracks
Fig. 8 Scenario E (conservative solution): Speed profiles
15
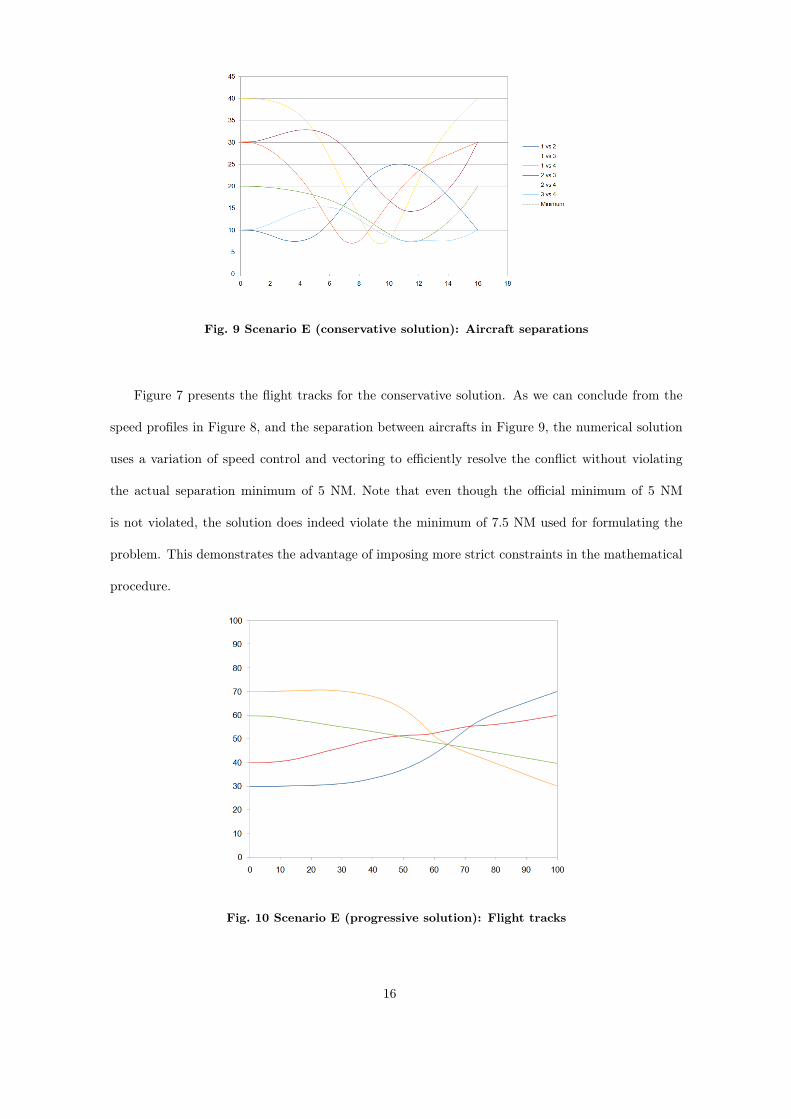
Fig. 9 Scenario E (conservative solution): Aircraft separations
Figure 7 presents the flight tracks for the conservative solution. As we can conclude from the
speed profiles in Figure 8, and the separation between aircrafts in Figure 9, the numerical solution
uses a variation of speed control and vectoring to efficiently resolve the conflict without violating
the actual separation minimum of 5 NM. Note that even though the official minimum of 5 NM
is not violated, the solution does indeed violate the minimum of 7.5 NM used for formulating the
problem. This demonstrates the advantage of imposing more strict constraints in the mathematical
procedure.
Fig. 10 Scenario E (progressive solution): Flight tracks
16
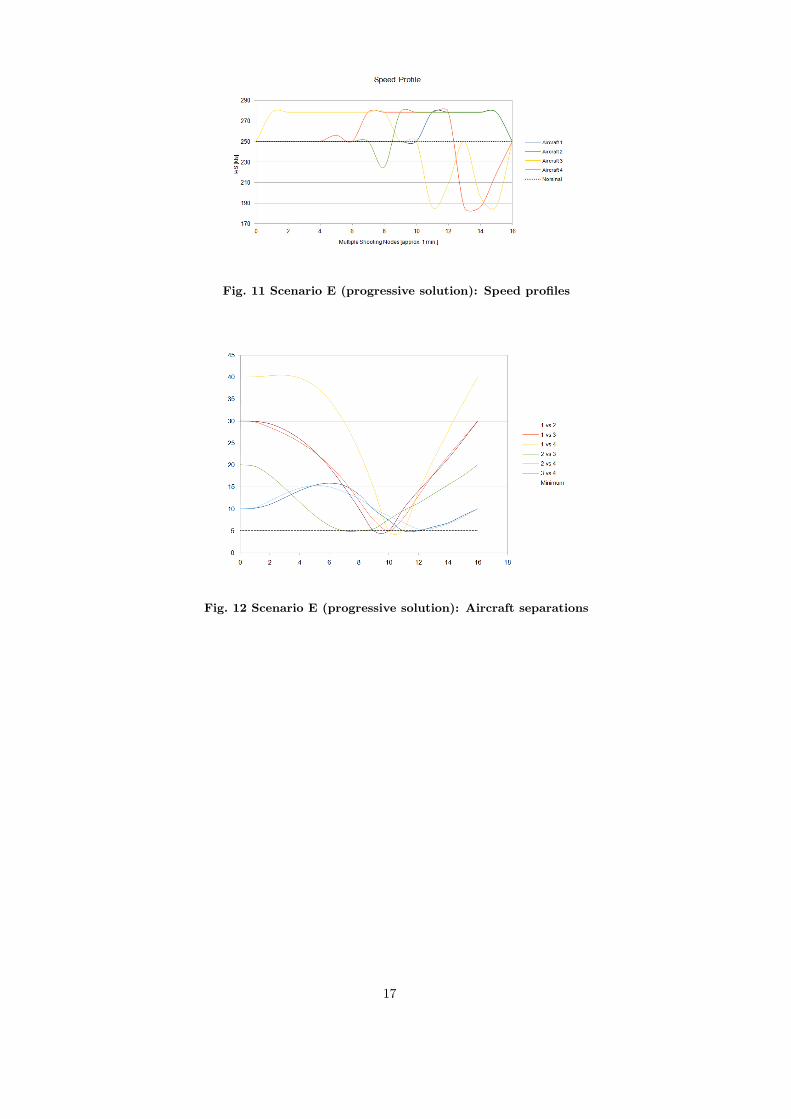
Fig. 11 Scenario E (progressive solution): Speed profiles
Fig. 12 Scenario E (progressive solution): Aircraft separations
17

Fig. 13 Scenario E (human solution): Flight tracks
Figure 13 shows a human solution for Scenario E. If you compare the resulting geometry obtained
by the conservative and progressive (see Figure 10) solutions, one may observe that the geometry
of the human solution is more complex and that each aircraft is controlled differently. Again, from
Figure 11, it is apparent that the progressive solution applies a significant amount of speed control
not only to solve conflicts, but also to adhere to nominal sector transit times.
Cons Pro Human Average
Delay/[s] 313 0 315
Track Excess/[NM] 17.0 9.0 30.4
Table 5 Scenario E: Comparison of solutions
The results for Scenario E are summarized in Table 5. It is remarkable that, again, the delay is
on a comparable level for both the human average and the conservative solution. Even though the
progressive solution clearly achieves excellent results, one could argue that the speed profile yields
too much variation for each aircraft, and that the minimum separation between aircrafts is slightly
violated multiple times.
18
IV. Numerical Experiments: Evaluation and Discussion
As we have seen in the previous section, the results obtained by the proposed approach are
very promising. The fact that the numerical solutions yield much better results in terms of delay
and flight track excess shows the potential efficiency of the method. Similar results are obtained in
numerical experiments with other scenarios, the detailed description of which can be found in [15].
The results of the numerical experiments in all scenarios allow the following interpretations.
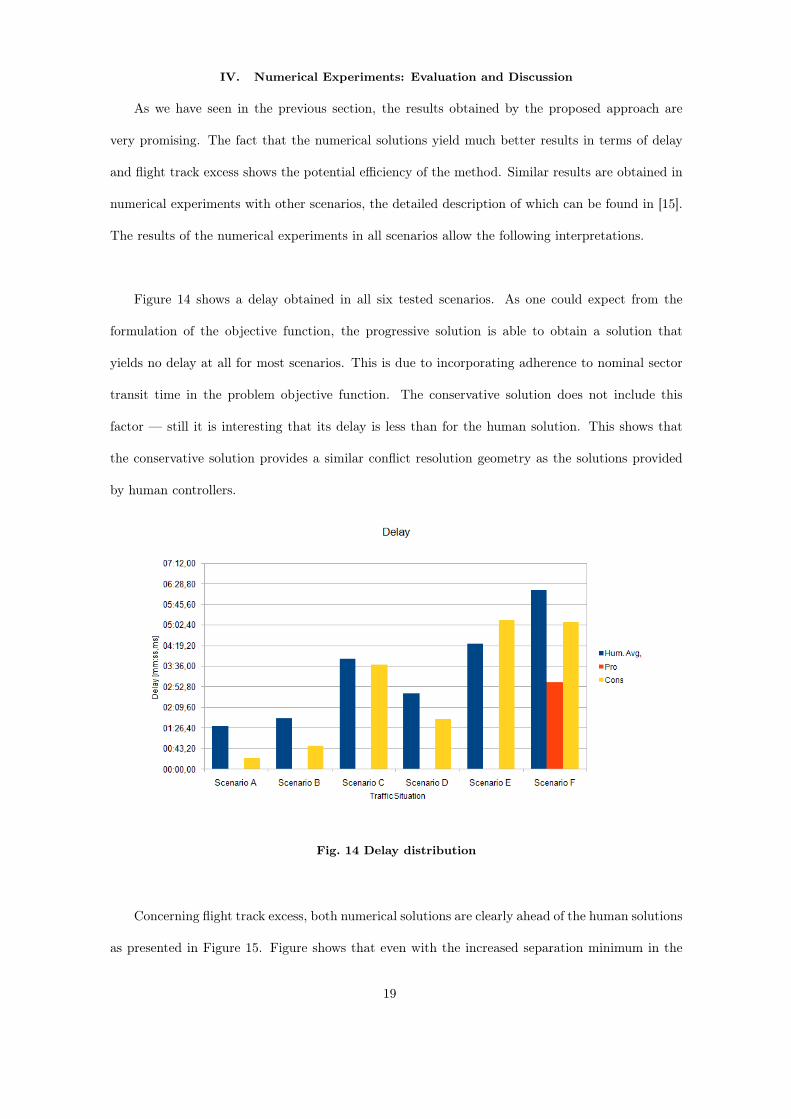
Figure 14 shows a delay obtained in all six tested scenarios. As one could expect from the
formulation of the objective function, the progressive solution is able to obtain a solution that
yields no delay at all for most scenarios. This is due to incorporating adherence to nominal sector
transit time in the problem objective function. The conservative solution does not include this
factor — still it is interesting that its delay is less than for the human solution. This shows that
the conservative solution provides a similar conflict resolution geometry as the solutions provided
by human controllers.
Fig. 14 Delay distribution
Concerning flight track excess, both numerical solutions are clearly ahead of the human solutions
as presented in Figure 15. Figure shows that even with the increased separation minimum in the
19
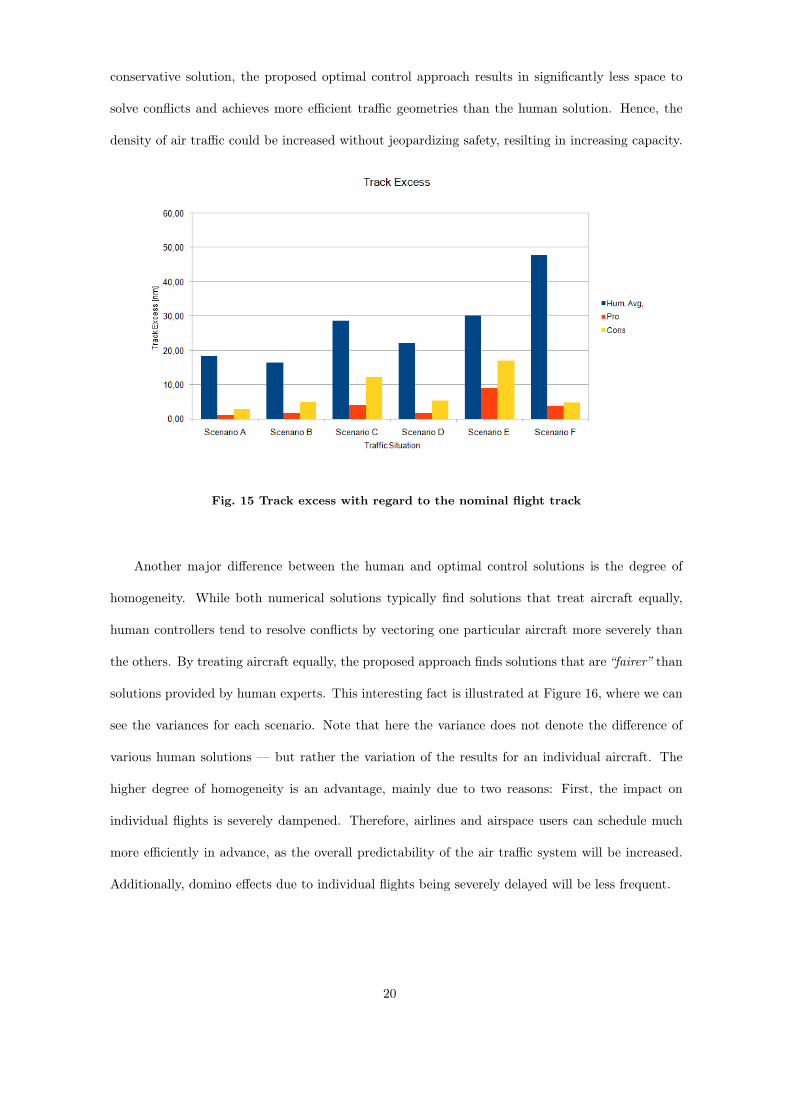
conservative solution, the proposed optimal control approach results in significantly less space to
solve conflicts and achieves more efficient traffic geometries than the human solution. Hence, the
density of air traffic could be increased without jeopardizing safety, resilting in increasing capacity.
Fig. 15 Track excess with regard to the nominal flight track
Another major difference between the human and optimal control solutions is the degree of
homogeneity. While both numerical solutions typically find solutions that treat aircraft equally,
human controllers tend to resolve conflicts by vectoring one particular aircraft more severely than
the others. By treating aircraft equally, the proposed approach finds solutions that are “fairer” than
solutions provided by human experts. This interesting fact is illustrated at Figure 16, where we can
see the variances for each scenario. Note that here the variance does not denote the difference of
various human solutions — but rather the variation of the results for an individual aircraft. The
higher degree of homogeneity is an advantage, mainly due to two reasons: First, the impact on
individual flights is severely dampened. Therefore, airlines and airspace users can schedule much
more efficiently in advance, as the overall predictability of the air traffic system will be increased.
Additionally, domino effects due to individual flights being severely delayed will be less frequent.
20
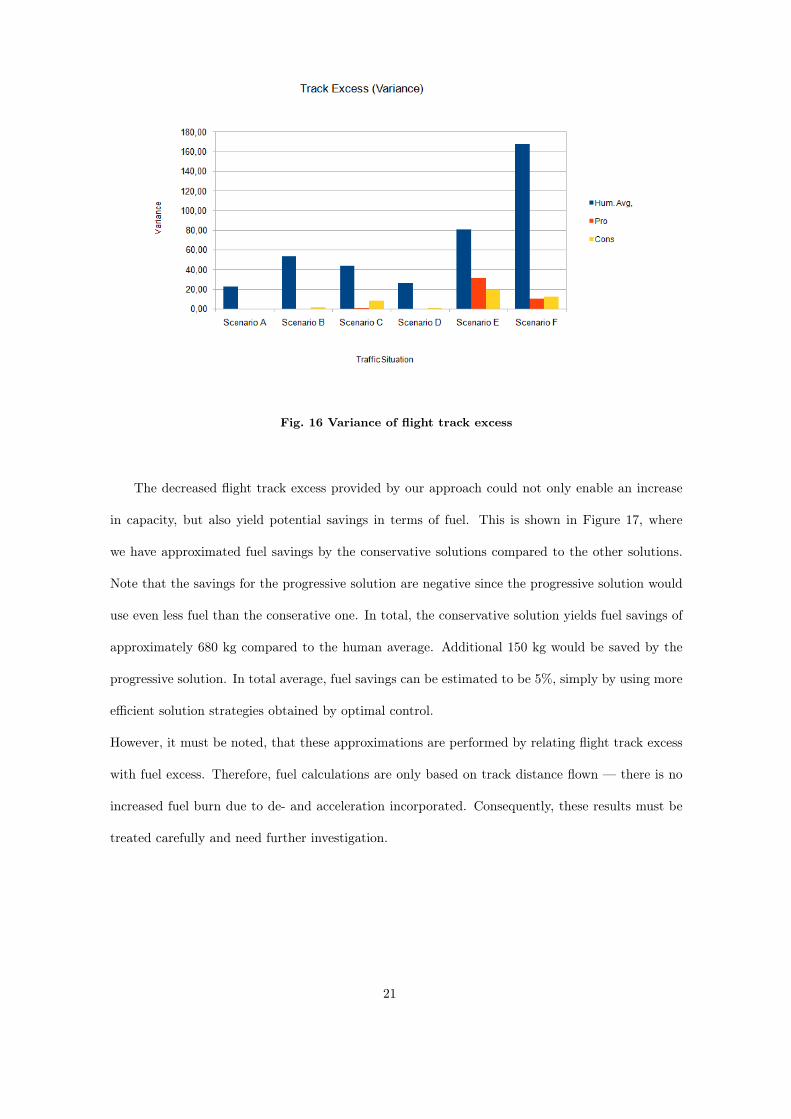
Fig. 16 Variance of flight track excess
The decreased flight track excess provided by our approach could not only enable an increase
in capacity, but also yield potential savings in terms of fuel. This is shown in Figure 17, where
we have approximated fuel savings by the conservative solutions compared to the other solutions.
Note that the savings for the progressive solution are negative since the progressive solution would
use even less fuel than the conserative one. In total, the conservative solution yields fuel savings of
approximately 680 kg compared to the human average. Additional 150 kg would be saved by the
progressive solution. In total average, fuel savings can be estimated to be 5%, simply by using more
efficient solution strategies obtained by optimal control.
However, it must be noted, that these approximations are performed by relating flight track excess
with fuel excess. Therefore, fuel calculations are only based on track distance flown — there is no
increased fuel burn due to de- and acceleration incorporated. Consequently, these results must be
treated carefully and need further investigation.
21
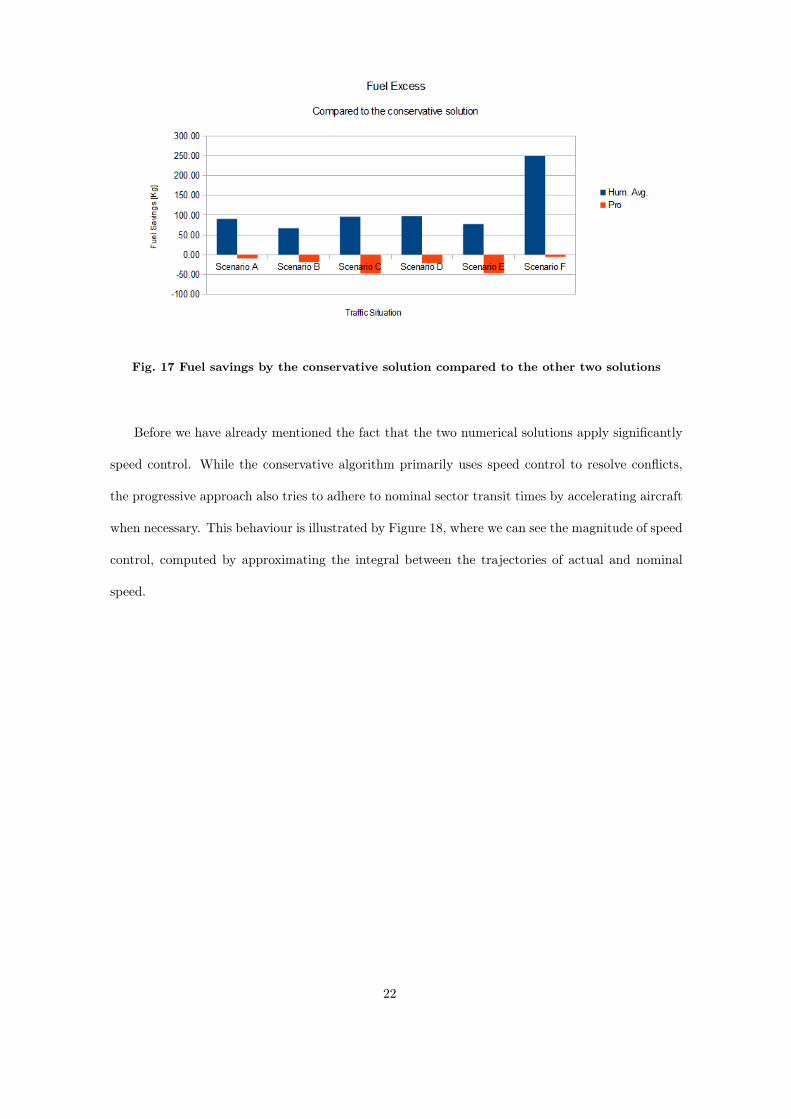
Fig. 17 Fuel savings by the conservative solution compared to the other two solutions
Before we have already mentioned the fact that the two numerical solutions apply significantly
speed control. While the conservative algorithm primarily uses speed control to resolve conflicts,
the progressive approach also tries to adhere to nominal sector transit times by accelerating aircraft
when necessary. This behaviour is illustrated by Figure 18, where we can see the magnitude of speed
control, computed by approximating the integral between the trajectories of actual and nominal
speed.
22
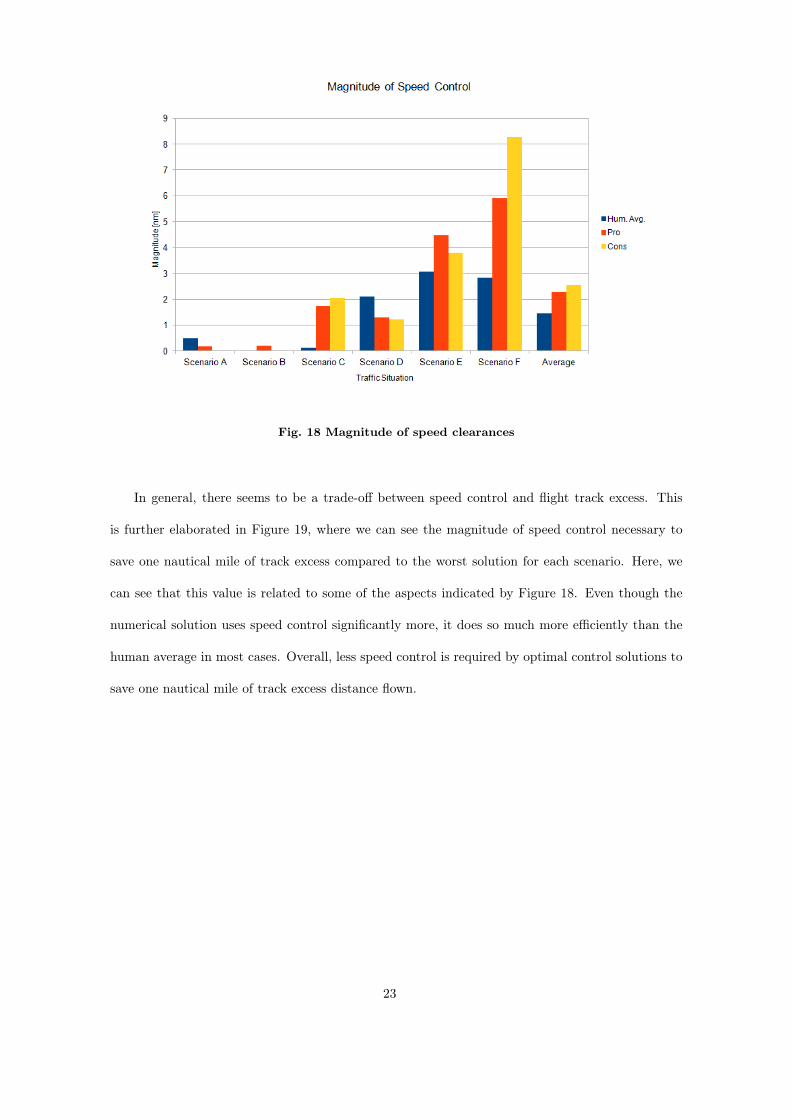
Fig. 18 Magnitude of speed clearances
In general, there seems to be a trade-off between speed control and flight track excess. This
is further elaborated in Figure 19, where we can see the magnitude of speed control necessary to
save one nautical mile of track excess compared to the worst solution for each scenario. Here, we
can see that this value is related to some of the aspects indicated by Figure 18. Even though the
numerical solution uses speed control significantly more, it does so much more efficiently than the
human average in most cases. Overall, less speed control is required by optimal control solutions to
save one nautical mile of track excess distance flown.
23
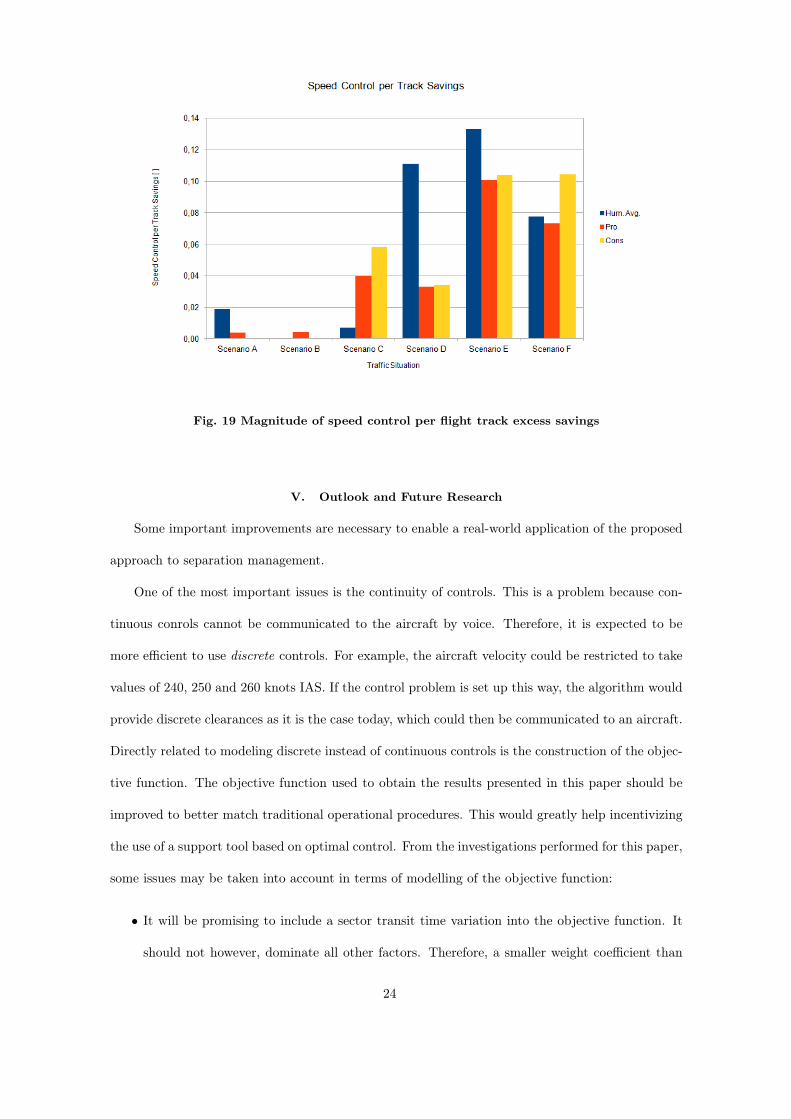
Fig. 19 Magnitude of speed control per flight track excess savings
V. Outlook and Future Research
Some important improvements are necessary to enable a real-world application of the proposed
approach to separation management.
One of the most important issues is the continuity of controls. This is a problem because con-
tinuous conrols cannot be communicated to the aircraft by voice. Therefore, it is expected to be
more efficient to use discrete controls. For example, the aircraft velocity could be restricted to take
values of 240, 250 and 260 knots IAS. If the control problem is set up this way, the algorithm would
provide discrete clearances as it is the case today, which could then be communicated to an aircraft.
Directly related to modeling discrete instead of continuous controls is the construction of the objec-
tive function. The objective function used to obtain the results presented in this paper should be
improved to better match traditional operational procedures. This would greatly help incentivizing
the use of a support tool based on optimal control. From the investigations performed for this paper,
some issues may be taken into account in terms of modelling of the objective function:
• It will be promising to include a sector transit time variation into the objective function. It
should not however, dominate all other factors. Therefore, a smaller weight coefficient than
24
used in the progressive solution seems reasonable.
• To prevent the algorithm to focus on speed control, the weight coefficient α2 for speed varia-
tions should be increased.
• Minimizing the total bank angle flown as done for this paper might not always be the best
solution. Instead, auxiliary variables should be included that compute the total variation
in flight track distance flown, so that this factor can be taken into account in the objective
function.
• More generally, since we need to optimize several sometimes conflicting objectives, numerical
studies from the point of view of multicriterial optimization would be helpfull for an appro-
priate choice of weight coefficients in the objective function.
For numerical solutions the path constraints may be violated between time discretization grid
nodes. Since the violation of the separation minimum is not allowed, one should use robustification
of the path constraints as discussed e.g. in [8].
Another important issue is repeated update of traffic situation. The constrained optimal control
problem (5) considered in this paper treats one particular traffic situation. In reality however,
air traffic is propagating in streams or flows of aircraft, where the situation in an actual airspace
will change continuously. While one aircraft will leave a particular airspace, others will enter
it. Therefore, it is reasonable to emphasize the installment of a control loop that will re-assess
the traffic situation at a constant rate, hence adapting the control problem (5) and its con-
straints. By using a loop structure of continuously connected optimal control problems we may
obtain a feedback law that will yield a control strategy able to process possible perturbations
and data inaccuracies. In case the basic structure of the problem remains the same (i.e. no air-
craft have entered or left the sector), this framework would lead to a NMPC implementation, see [3].
Last but not least, an interesting enhancenment of the model are the implementation of
three-dimensional dynamics as well as weather and wind effects.
25
VI. Conclusions
In this paper, we have presented a framework for resolving air traffic conflict situations by
providing conflict-free and optimal trajectories for all airspace users. This framework is based on
optimal control theory, which is a new approach to a centralized separation management. We
have presented details of numerical experiments for two different traffic scenarios, as well as the
discussion of the numerical experiments for the set of six scenarios presented in details in [15].
These scenarios have been designed to represent worst-case traffic situations, incorporating conflicts
between multiple aircrafts. The numerical results obtained by solution of optimal control problems
have been then compared to real-time simulations performed by human controllers who have solved
the same traffic scenarios.
Results from these experiments have clearly shown that, compared to the human average, the
optimal control solutions have achieved better results. The delays are considerably lower, partic-
ularly for the progressive solution strategy. At the same time, the numerical solutions cause less
flight track excess, i.e. the actual distance flown by the aircraft is reduced. The savings in terms of
track distance flown are significant: In total, the human average has a track excess of 27 NM, while
the automated solution yields in average 3.6 NM for the progressive solution, and 7.8 NM for the
conservative solution. These savings are primarily due to two factors: First of all, the numerical
solutions use the available airspace more efficiently. As we have seen, the optimal control process
controls aircraft such that aircraft are separated very closely to the separation minimum. While
human controllers typically aim for a separation of 7.5 NM or more (as it has been the case during
the simulations), the optimal control procedure is able to aim for a lower value while still ensuring
the official minimum separation of 5 NM. As a second reason, it can be seen that the numerical
solutions use speed control to a greater extent and more efficiently than the human average. More-
over, it is also shown that the optimal control procedure uses speed control more efficiently. Another
potential of optimal control in separation management is yielding significant fuel savings of up to
5% with no workload for the human controller in terms of actual conflict resolution.
Results of numerical experiments also indicate that the approach must be further adapted to enable
26
a possible application in the real-world as a human controller assistance tool. Further research for
the application of optimal control in air traffic control is of great importance.
Acknowledgments
The authors would like to thank Deutsche Flugsicherung GmbH (DFS) for the collaboration in
this project. In particular, this project has been supported by the DFS R&D department as well
as the department for ATM Operations & Strategy. The authors are also thankful to Prof. Dr.
Dr. h.c. Hans Georg Bock (IWR, University of Heidelberg) for support in using software package
MUSCOD-II.
References
[1] F. Bellomi, R. Bonato, V. Nanni, and A. Tedeschi. Satisficing game theory for conflict resolution and
traffic optimization. Air Traffic Control Quarterly, 16(3):211–233, 2008.
[2] H.G. Bock and K.J. Plitt. A multiple shooting algorithm for direct solution of optimal control problems.
In Proceedings of the IFAC 9th World Congress, pages 242–247, July 2-6 1984.
[3] M. Diehl. Real-Time Optimization for Large Scale Nonlinear Processes. PhD thesis, Ruprecht-Karls-
Universität Heidelberg, 2001.
[4] P.J. Enright and B.A. Conway. Discrete approximations to optimal trajectories using direct transcrip-
tion and nonlinear programming. AIAA Paper 90-2963-CP, 1990.
[5] Deutsche Flugsicherung GmbH Forschung & Entwicklung. Staffelungsverhalten ACC Frankfurt. Jour-
Fixe, June 2001.
[6] Eurocontrol Experimental Centre. User Manual for the Base of Aircraft Data (BADA), 3.7 edition,
2009.
[7] A. Lecchini, W. Glover, J. Lygeros, and J. Maciejowski. Model predictive control formulation of conflict
resolution task. Hybridge Work Package 5: Control of Uncertain Hybrid Systems, 2004.
[8] M.Diehl, E.A.Kostina, and H.G.Bock. An approximation technique for robust nonlinear optimization.
Mathematical Programming, 107:213–230, 2006.
[9] J. Nocedal and S.J. Wright. Numerical Optimization. Springer Series in Operations Research. Springer,
2 edition, 2006.
[10] J. Omer and T. Chaboud. Tactical and post-tactical air traffic control methods. 9th Innovative Research
Workshop & Exhibition, 2010.
27
[11] P. Krämer-Eis. Ein Mehrzielverfahren zur Numerischen Berechnung Optimaler Feedback-Steuerungen
bei Beschränkten Nichtlinearen Steuerungsproblemen. PhD thesis, Universität Bonn, 1985.
[12] Performance Review Commission. Performance review report 2010. 2011.
[13] Clement Peyronne, Daniel Delahaye, Marcel Mongeau, and Laurent Lapasset. Optimizing b-splines
using genetic algorithms applied to air-traffic conflict resolution. In IJCCI (ICEC)’10, pages 213–218,
2010.
[14] M.J.D. Powell. Vmcwd: a fortran subroutine for constrained optimization. Newsletter ACM SIGMAP
Bulletin, (32), 1983.
[15] L. Walter. Direct optimal control methods for a centralized approach to separation management.
Diploma Thesis, January 2012.
28



![Distributed Automatic Load-Frequency Control with ... · system-wide optimal load control techniques as an unresolved task. For load-side frequency control, centralized methods [12],](https://img.pdfslide.net/doc/110x75/5ec3974128e52e6e5318465f/distributed-automatic-load-frequency-control-with-system-wide-optimal-load-control.jpg)




![Joint Optimal Power Control and Beamforming in …sig.umd.edu/publications/Rashid-Farrokhi_TComm_199810.pdf · A centralized power control algorithm [4], [5] solves (4) by requiring](https://img.pdfslide.net/doc/110x75/5b5e35e87f8b9aa3048c8b45/joint-optimal-power-control-and-beamforming-in-sigumdedupublicationsrashid-farrokhitcomm.jpg)