Embed Size (px)
Citation preview

Research ArticleOptimal Disturbances Rejection Control for AutonomousUnderwater Vehicles in Shallow Water Environment
Qing Yang1 Hao Su1 Gong-You Tang1 and De-Xin Gao2
1College of Information Science and Engineering Ocean University of China Qingdao 266100 China2College of Automation and Electronic Engineering Qingdao University of Science amp Technology Qingdao 266042 China
Correspondence should be addressed to Gong-You Tang gtangouceducn
Received 28 April 2016 Accepted 26 January 2017 Published 29 March 2017
Academic Editor Huaguang Zhang
Copyright copy 2017 Qing Yang et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
To deal with the disturbances of wave and current in the heading control of Autonomous Underwater Vehicles (AUVs) an optimaldisturbances rejection control (ODRC) approach for AUVs in shallow water environment is designed to realize this applicationBased on the quadratic optimal control theory the AUVs heading control problem can be expressed as a coupled two-pointboundary value (TPBV) problem Using a recently developed successive approximation approach the coupled TPBV problemis transformed into solving a decoupled linear state equation sequence and a linear adjoint equation sequence By iterativelysolving the two equation sequences the approximate ODRC law is obtained A Luenberger observer is constructed to estimatewave disturbances Simulation is provided to demonstrate the effectiveness of the presented approach
1 Introduction
Nowadays there has been increasing interest in the useof AUVs to expand the ability to survey ocean areas forexample exploration and exploitation of seafloor mineralsoceanographic mapping and underwater pipelines tracking[1] However due to highly nonlinear and strongly coupleddynamics of AUVs and the environmental disturbances(such as currents and waves) it is always a challenge todesign controller for AUVs Recently numerous nonlinearcontrol methods have been utilized to achieve improvedperformances for motion control of AUVs Typical resultsinclude sliding control adaptive control and optimal controlIn [2ndash4] the sliding mode control techniques were appliedto motion control of AUVs In [5ndash7] the backsteppingcontrol approach was employed to design controller forpath following of underactuated AUVs In [8 9] 1198672 and119867infin controllers were presented for motion control of AUVsIn [10ndash12] the adaptive control methods were utilized formotion control of AUVs to improve robustness of the controlsystems In [13] a suboptimal control approach was proposedfor motion control of AUVs In [14] a feedback linearizationtechnique was applied for AUVs tracking problem In [15]
the combined problem of trajectory planning and trackingcontrol for underactuated AUVs in the horizontal plane wasaddressed and a backstepping approach was presented In[16] Lyapunov approach and backstepping control approachwere applied to design path-following controller of anAUV inthe horizontal plane with constant ocean currents In [17] an119867infin robust fault-tolerant controller was designed to improvethe security and reliability of navigation and enhance theaccuracy and robustness of navigation control system forAUVs
Note that nonlinearity and disturbances such as currentsand wave are unavoidable in AUVs control systems whichaffect the performance of the AUVs system At presentthere are many methods to deal with these problems In[18] an output feedback control approach was proposed forthe trajectory tracking control of AUVs which moved inshallow water areas In [19] for the problem of dynamicpositioning and way-point tracking of underactuated AUVsin the presence of constant unknown ocean currents andparametric modeling uncertainty a nonlinear adaptive con-troller was proposed In [20] a stable sliding mode controllerwas designed which can track AUVs along the desiredtrajectory in complex sea conditions In [21] an adaptive
HindawiMathematical Problems in EngineeringVolume 2017 Article ID 8506381 9 pageshttpsdoiorg10115520178506381
2 Mathematical Problems in Engineering
Earth frame
Y
Z
X
w (heave)
r (yaw)
q (pitch)p (roll)
u (surge)Body frame
n
s
r
(sway)
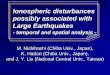
Figure 1 A schematic of the six-DOF AUVs model
output feedback controller was presented for AUVs namedODIN to track a desired trajectory with bounded errorsin wave disturbances condition In [22] a second-ordersliding mode controller was proposed for an AUV whichcan compensate for disturbances such as waves currents andbuoyancy force
In the field of modern control one of the key ideas isthe use of optimization and optimal control theory to give asystematic procedure for the design of feedback control sys-tems [23ndash25] LQR approach provides one of the most usefultechniques for designing state feedback controllers In orderto overcome disturbances and nonlinearities for theAUV sys-tem in this paper an ODRC approach is proposed based onthe quadratic optimal control theory Firstly the AUVsmodeland wave disturbances model are obtained and according todisturbances type an integral unit is introduced to eliminateits ocean current disturbances effect and a feedforwardcontrol is used to reject wave disturbances Secondly for theAUVs heading control system the coupled TPBV problemis derived from the maximum principle of optimal controltheory Then by using a successive approximation approach[26 27] the coupled TPBV problem is transformed intosolving two decoupled linear differential sequences in statevectors and adjoint vectors By iterative solution the ODRClaw is obtained and a Luenberger disturbances observer isconstructed to make it realizable The contribution in thispaper is the ODRC approach which is applied to designrejection controller for AUVs in shallow water environmentwhich only requires solving the Riccati equation and theSylvester matrix equation one time while mainly solving arecursion formula of adjoint vectors
This paper is organized as follows In Section 2 themodelof AUVs motion in horizontal plane is introduced and thesystem of shallow wave disturbances is constructed Section 3presented an ODRC design for AUVs Simulation validatesthe effectiveness of the designed controller under wavedisturbances in Section 4 Section 5 provides the concludingremarks
2 System Models
21 Mathematical Model of AUVs A schematic of the six-DOF AUVs model with related coordinate system is shownin Figure 1
The two reference frames are applied to the modelEarth-fixed frame and body-fixed frame Descriptions of theparameters are expressed in Table 1 [28ndash30]
The Earth-fixed frame is treated as an inertial frame Inorder to facilitate the analysis and synthesis for AUVs thecoupling effect between the roll surface movement and twocases of plane motion is usually ignored and then the vehiclemotion is divided into horizontal and verticalmovementTheheading motion equations in horizontal plane are given indimensional form as
119898[V + 119906119903 minus 119908119901] = sum119884119868119911 119903 + (119868119910 minus 119868119909) 119901119902 = sum119873
= (119902 sin120601 + 119903 cos120601)cos 120579
(1)
where
sum119884 = 121205881198714 [1198841015840119903 119903 + 1198841015840 + 1198841015840119901119902119901119902 + 1198841015840119903|119903|119903 |119903|] + 12
sdot 1205881198713 [1198841015840V V + 1198841015840119906119903119906119903 + 1198841015840119908119901119908119901+ 1198841015840V|119903| V|V|radicV2 + 1199082 |119903|] + 1
21205881198712 [1198841015840119906V119906V+ 1198841015840V|V|VradicV2 + 1199082] + (119882 minus 119861) cos 120579 sin120601 + 12sdot 120588119871211988410158401205751199031199062120575119903 + 119889
sum119873 = 121205881198715 [1198731015840119903 119903 + 1198731015840119901119902119901119902 + 1198731015840119903|119903|119903 |119903|] + 1
21205881198714 [1198731015840VV+ 1198731015840119906119903119906119903 + 1198731015840119908119901119908119901 + 1198731015840V119902V119902 + 1198731015840|V|119903radicV2 + 1199082119903] + 12sdot 1205881198713 [1198731015840119906V119906V + 1198731015840V|V|VradicV2 + 1199082] + 12120588119871311987310158401205751199031199062120575119903+ 119889
(2)
In system (1) 120575119903 is the control rudder angle 119871 119898 119882and 119861 respectively are the vehiclersquos length quality weightand buoyancy 120588 is the density of seawater 119868119909 119868119910 and 119868119911respectively are the vehiclersquos moment of inertia about 119909- 119910-and 119911-axis 119889 is the external disturbances 1198841015840(sdot) and1198731015840(sdot) arehydrodynamic coefficients
Suppose that the axial velocity 119906 = 1199060 is a given constantand the influences of the vertical plane motion and theparameters of the rolling motion are neglected then we have
(119898 minus 1212058811987131198841015840V) V + (minus1212058811987141198841015840119903) 119903 = (1212058811987121198841015840119906V1199060) V+ (1
2120588119871311988410158401199061199031199060 minus 1198981199060) 119903 + (121205881198712119884101584012057511990311990602) 120575119903
+ [1212058811987141198841015840119903|119903|119903 |119903| + 1212058811987131198841015840V|119903|V |119903| + 1212058811987121198841015840V|V|V |V|
Mathematical Problems in Engineering 3
Table 1 Notation used for AUVs
DOF Motionrotationdescription Forcesmoments Linearangular velocities PositionsEuler angles
1 In 119909-direction(surge) 119883 119906 119909
2 In 119910-direction(sway) 119884 V 119910
3 In 119911-direction(heave) 119885 119908 119911
4 About 119909-axis(roll) 119870 119901 120601
5 About 119910-axis(pitch) 119872 q 120579
6 About 119911-axis(yaw) N 119903 120595
+ (119882 minus 119861) cos 120579 sin120601] + 119889(minus1212058811987141198731015840V) V + (119868119911 minus 1212058811987151198731015840119903) 119903 = (1212058811987131198731015840119906V1199060) V
+ (12120588119871411987310158401199061199031199060) 119903 + (1
21205881198713119873101584012057511990311990602) 120575119903+ (1212058811987151198731015840119903|119903|119903 |119903| + 1212058811987141198731015840|V|119903 |V| 119903+ 1
212058811987131198731015840V|V|V |V|) + 119889 = 119903
(3)
Define the heading instruction as a constant 120595119903 and 119903 =0 heading error is 120595119890(119905) and then
120595119890 = 120595119903 minus 120595119890 = 119889 (120595119903 minus 120595)
119889119905 = minus = minus119903 (4)
Considering the ocean current disturbances an integral unitis introduced to eliminate the accumulated error
119868 = 120595119890 (5)Define the state vector as 119909 = [V 119903 120595119890 120595119868]119879 isin 1198774 the
control vector 120575119903(119905) = 119906(119905) and the dynamic model of theAUVs heading control system can be rewritten as follows
(119905) =[[[[[[
11988611 11988612 0 011988621 11988622 0 00 minus1 0 00 0 1 0
]]]]]]
[[[[[[
V
119903120595119890120595119868
]]]]]]
+[[[[[[
1198871119887200
]]]]]]120575119903 +
[[[[[[
1198891119889200
]]]]]]119889
+[[[[[[
1198911119891200
]]]]]]
= 119860119909 (119905) + 119861119906 (119905) + 119863119889 (119905) + 119891 (119909 119905) 119909 (1199050) = 1199090
(6)
where
[11988611 1198861211988621 11988622] = 119879minus11198601
[11988711198872] = 119879minus11198611
[11988911198892] = 119879minus1 [11]
[11989111198912] = 119879minus1 [[[
1212058811987141198841015840119903|119903|119903 |119903| +
1212058811987131198841015840V|119903|V |119903| +
1212058811987121198841015840V|V|V |V| + (119882 minus 119861) cos 120579 sin120601
1212058811987151198731015840119903|119903|119903 |119903| +
1212058811987141198731015840|V|119903 |V| 119903 +
1212058811987131198731015840V|V|V |V|
]]]
4 Mathematical Problems in Engineering
119879 = [[[119898 minus 1
212058811987131198841015840V minus1212058811987141198841015840119903minus1212058811987141198731015840V 119868119911 minus 1212058811987151198731015840119903
]]]
1198601 = [[[
1212058811987121198841015840119906V1199060
12120588119871311988410158401199061199031199060 minus 11989811990601
212058811987131198731015840119906V119906012120588119871411987310158401199061199031199060
]]]
1198611 = [[[
121205881198712119884101584012057511990311990602121205881198713119873101584012057511990311990602
]]]
(7)
119860 119861 and 119863 are defined in (6) 1199090 is the initial state and119891(119909 119905) is a limitary nonlinear vector which includes errorsand uncertainties
Remark 1 The limitary nonlinear vector 119891(119909 119905) satisfies thefollowing Lipschitz conditions
1003817100381710038171003817119891 (119909 119905)1003817100381710038171003817 le 120572 119909 1003817100381710038171003817119891 (119909 119905) minus 119891 (119909 119905)1003817100381710038171003817 le 120573 119909 minus 119909
forall119909 119909 isin Ω sub 1198774(8)
where 120572 and 120573 are positive constants
22 Disturbances Model of Wave Force The external distur-bances for AUVs are complex In the near water surfacethe wave force disturbances are the most important factor tothe AUVs system But ocean waves are always irregularIn present study the irregular long storm waves are oftensimplified [31ndash33] as follows
120577119886 (119905) =infinsum119894=1
120577119886119894 cos (119896119894120585 cos 120583 + 119896119894120578 sin 120583 minus 120596119894119905 + 120576119894) (9)
where 119896119894 is the 119894th component wave number 120596119894 is the 119894thcomponent wave frequency 120576119894 is a random phase angleuniformly distributed within 0 sim 2120587 120577119886119894 is the 119894th componentwave amplitude 120577119886119894 = radic2119878(120596119894)Δ120596 119878(120596119894) is the 119894th componentocean power spectrum density (PSD) function and Δ120596 is thefrequency discretization intervals of wave spectrum
The wave force disturbances have been representedaccording to the Pierson-Moskowitz (PM) spectrum writtenas
119878 (120596) = 1198601205965 exp(minus119861
1205964 ) (10)
where 119860 = 000811198922 119861 = 312(11986713)2 where 119892 is theacceleration due to gravity and 11986713 is the significant waveheight in meters
Considering the stationary waves on the sea surface let120585 = 0 and 120578 = 0 and choose multiple regular wavesuperposition to get randomwaves so the point long-crestedwaves are written as
120577119886 (119905) =119873sum119894=1
radic2119878 (120596119894) Δ120596 cos (120596119890119894119905 + 120576119894)
= 119873sum119894=1
119879119894 (120596119894) cos 120579119894(11)
where 119873 is the number of superimposed waves 120596119890119894 = 120596119894 minus(12059611989421199060119892) cos120573 is encounter angle frequency and 120573 is theencounter wave angle
We construct a system model to describe the irregularwave forces for the AUV in two-dimensional horizontalplane
Define V119894 = 119879119894(120596119894) cos(120579119894) as the horizontal velocity ofwater particle orbital motion
Let V(119905) = [V1(119905) sdot sdot sdot V119873(119905)]119879 taking the derivative ofV(119905) we have
V119894 = minus1205962119894 V119894 = minusΩV (12)
whereΩ = diag12059621 12059622 1205962119873Define 119908(119905) = [V(119905)119879 V(119905)119879]119879 then
(119905) = [ 0 119868minusΩ 0]119908 (119905) ≜ 119865119908 (119905)
V (119905) = [119868 0]119908 (119905) (13)
where 119868 is119873 dimensional unit matrix and 0 is119873 dimensionalzero matrix
Mathematical Problems in Engineering 5
According to the linear wave theory the wave forcedisturbances for the AUV system are as follows
119889 (119905) = 119873sum119894=1
119879119894 (120596119894) V119894 (119905)= [1198791 (1205961) sdot sdot sdot 119879119873 (120596119873)] [V1 (119905) sdot sdot sdot V119873 (119905)]119879= [1198791 (1205961) sdot sdot sdot 119879119873 (120596119873)] [119868 0]119908 (119905) ≜ 119867119908 (119905)
(14)
So the total wave force disturbances for AUVs can be de-scribed by the following system
(119905) = 119865119908 (119905) 119889 (119905) = 119867119908 (119905) (15)
where 119865 and 119867 are real constant matrices of appropriatedimensions
3 Controller Design
According to the dynamic model of the AUVs headingcontrol system (6) we select the following average quadraticperformance index
119869 = lim119879rarrinfin
1119879 int1198791199050
[119909119879 (119905) 119876119909 (119905) + 119906119879 (119905) 119877119906 (119905)] 119889119905 (16)
where119876 is theweightingmatrix for states symmetric positivesemidefinite and 119877 is the weighting matrix for the controlinputs symmetric positive definite 119876 and 119877 are properlyselected to shape the response characteristics in the closed-loop AUVs heading control system (6)
The optimal control problem is to search for a control law119906lowast(119905) for system (6) which makes the value of the averagequadratic performance index (16) minimum
Applying the maximum principle of the optimal controlproblem in (6) and (16) the optimal control law can bewritten as
119906lowast (119905) = minus119877minus1119861119879120582 (119905) (17)
where 120582(119905) is the solution to the following TPBV problem
minus (119905) = 119876119909 (119905) + 119860119879120582 (119905) + 119891119879119909 (119909 119905) 120582 (119905) (119905) = 119860119909 (119905) minus 119878120582 (119905) + 119891 (119909 119905) + 119863119889 (119905)
119909 (1199050) = 1199090120582 (infin) = 0
119905 gt 1199050
(18)
which is the optimality necessary condition where 119878 =119861119877minus1119861119879 and 119891119879119909 (119909 119905) = 120597119891119879(119909 119905)120597119909For the AUVs heading control system (6) and wave force
system (15) with the average quadratic performance index(16) we now state the following theorem
Theorem 2 Consider the optimal control problem describedby systems (6) and (15) with the average quadratic performanceindex (16) Then the ODRC law 119906lowast(119905) is existent and uniqueand its form is as follows
119906lowast (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + lim119896rarrinfin
119892(119896) (119905)] (19)
where 119875 is the unique positive-definite solution of the followingRiccati matrix equation
119860119879119875 + 119875119860 minus 119875119878119875 + 119876 = 0 (20)
119875 is the unique solution of the following Sylvester matrixequation
(119860 minus 119878119875)119879 119875 + 119875119865 = minus119875119863119867 (21)
Proof Let
120582 (119905) = 119875119909 (119905) + 1198751119889 (119905) + 119892 (119905) (22)
where 119909(119905) 119889(119905) and 119892(119905) are the state vector the wave forcedisturbances and the adjoint vector respectively
It is well known that119875 is the unique positive-definite solu-tion of Riccati matrix equation (20) Substituting 119875 into (21)then 119875 can be solved uniquely here 119875 = 1198751119867 When 119875 and119875 are got uniquely therefore we can obtain the ODRC lawuniquely as follows
119906lowast (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892 (119905)] (23)
where 119892(119905) and 119909(119905) are the solutions of the followingequations
119892 (119905) = (119875119878 minus 119860119879) 119892 (119905) minus 119875119891 (119909 119905)minus 119891119879119909 (119909 119905) [119875119909 (119905) + 119875119908 (119905) + 119892 (119905)]
(119905) = (119860 minus 119878119875) 119909 (119905) + (119863119867 minus 119878119875)119908 (119905) minus 119878119892 (119905)+ 119891 (119909 119905)
119892 (infin) = 0119909 (1199050) = 1199090
(24)
and 119908(119905) is the solution of the wave forces system (15)By using the successive approximation approach [26 27
31 34] we construct the adjoint vector sequence
119892(0) (119905) equiv 0119892(119896) (119905)= (119875119878 minus 119860119879) 119892(119896) (119905) minus 119875119891 (119909(119896minus1) 119905)
minus 119891119879119909 (119909(119896minus1) 119905) [119875119909(119896minus1) (119905) + 119875119908 (119905) + 119892(119896minus1) (119905)] lim119879rarrinfin
119892(119896) (119879) = 0119896 = 1 2
(25)
6 Mathematical Problems in Engineering
and the state equation sequence
119909(0) (119905) equiv 0(119896) (119905) = (119860 minus 119878119875) 119909(119896) (119905) + (119863119867 minus 119878119875)119908 (119905)
minus 119878119892(119896) (119905) + 119891 (119909(119896minus1) 119905) 119909(119896) (1199050) = 1199090
119896 = 1 2
(26)
It can be proved that the adjoint vector solution sequence119892(119896)(119905) in (25) uniformly converges to 119892(119905) and the statevector solution sequence 119909(119896)(119905) in (26) uniformly convergesto 119909(119905) [26 27 31 34]
When 119896 rarr infin the limits of 119909(119896)(119905) and 119892(119896)(119905) becomethe optimal state vector 119909lowast(119905) and the optimal adjoint vector119892(119905)
Define 119892(infin)(119905) = lim119896rarrinfin119892(119896)(119905) then the ODRC law isrewritten as (19) This completes the proof
Remark 3 It is usually impossible to obtain the exact adjointvector 119892(infin)(119905) when designing the ODRC law in practice Inmany cases it may be better to choose an 119892(119873)(119905) as theapproximation of 119892(infin)(119905) where 119873 depends on a concreteerror coefficient 120576 gt 0The119873th-orderODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] (27)
Remark 4 The 119873th-order ODRC law consists of a feedbackterm 119875119909(119905) a feedforward disturbances rejection term 119875119908(119905)and a nonlinear compensatory term 119892(119873)(119905)Remark 5 Thewave disturbances are difficult to bemeasuredand obtained and 119908(119905) is the state vectors of system (15)the ODRC law is physically unrealizable in practice Sowe construct a Luenberger disturbances observer to make itrealizable as follows
119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (28)
where 119908(119905) is the observation value of 119908(119905) and 119871 is theobserver matrix of appropriate dimensions We can choosethe appropriate dimensions matrix 119871 and the eigenvalues ofthe matrix (119865 minus 119871119867) have negative real parts Then the 119873th-order ODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] 119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (29)
4 Example and Simulation
41 Simulation Model and Parameters for AUVs and WaveForce Disturbances In this section a simulation study is car-ried out using a typical AUV model [35] to demonstrate theperformance of the proposed approach The hydrodynamiccoefficients of an AUV are shown in Table 2
Table 2 Hydrodynamic coefficients of the AUV
Name Symbol Numerical UnitQuality 119898 67831 kgLength 119871 5720 mSea-water density 120588 1025 kgm3
Dimensionlesscoefficient of swayforce
1198841015840 V minus39854
10minus3
1198841015840 119903 125671198841015840V|V| minus257041198841015840119903|119903| 99811198841015840119906V minus418581198841015840119906119903 104351198841015840120575119903 18509
Dimensionlesscoefficient of yawmoment
1198731015840 V minus38721198731015840 119903 minus21051198731015840V|V| 174801198731015840119903|119903| minus64631198731015840119906V minus28781198731015840119906119903 minus94361198731015840120575119903 minus9754
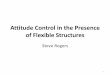
Assuming that the axial velocity is 1199060 = 2ms thesignificant wave height is 11986713 = 4m and encounter anglefrequency of wave is 06320 rads and 10470 rads then thePSD of the wave height is shown in Figure 2
And the wave force can be calculated from (11) which isshown in Figure 3
The matrices and vector of the AUVs heading controlsystem (6) are as follows
119860 =[[[[[[
minus01966 minus11472 0 0minus00780 minus06558 0 0
0 minus1 0 00 0 1 0
]]]]]]
119861 =[[[[[[
0196202165
00
]]]]]]
119863 =[[[[[[
0000200273
00
]]]]]]
119891 (119909 119905) =[[[[[[
minus1697711990912 + 2439611990922 minus 26767119909111990920045811990912 minus 0554111990922 minus 0036511990911199092
00
]]]]]]
(30)
Mathematical Problems in Engineering 7
Table 3 119869119873 and Δ119869 at different iteration times
119896 1 2 3 4 5119869119873 152455 113397 101086 97592 97452Δ119869 03444 01218 00358 00014
05 1 15 2 25 30Frequency (rads)
0
1
2
3
4
5
6
7
8
PSD
of w
ave h
eigh
t (G
2s
)
w = 06320 radsw = 10470 rads
Figure 2 PSD of wave height
The parameters for the average quadratic performanceindex (16) are chosen as
119876 =[[[[[[
1 0 0 00 1 0 00 0 1 00 0 0 1
]]]]]]
119877 = 5
(31)
By solving (20) and (21) we obtain
119875 =[[[[[[
65444 minus139363 31885 02422minus139363 796598 minus568132 minus10547831885 minus568132 569366 13129302422 minus105478 131293 52210
]]]]]]
119875 =[[[[[[
minus12713 minus06152 minus112055 minus54904195865 91021 574458 307596minus196954 minus95852 minus349479 minus209735minus45788 minus24965 minus42104 minus34488
]]]]]]
(32)
42 Simulation Results and Analysis Based on the AUVmodel and parameters the state vector is considered as119909 = [V 119903 120595119890 120595119868]119879 the simulation curves 119909(119905) and 119906(119905) atdifferent iteration times are shown in Figures 4ndash8
The average quadratic performance index values 119869119873 anderrors Δ119869 = |(119869119873minus1 minus 119869119873)119869119873| lt 120576 at different iteration timesare listed in Table 3 and 120576 is the control precision
10 20 30 40 50 60 70 80 90 1000Time (s)
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Am
plitu
de (m
)
Figure 3 Numerical simulation of the random wave force
10 20 30 40 50 60 70 80 90 1000Time (s)
minus3
minus2
minus1
0
1
2
3
k = 1k = 2
k = 4
x1(t
)
Figure 4 The simulation curves of 1199091(119905)
From Table 3 it can be seen clearly that the averagequadratic performance index values decrease as iterationtimes increase and tend to a deterministic optimal value 119869lowastultimately If we choose the control precision 120576 = 005 thenthe relative error of the average quadratic performance indexvalues satisfies |(1198693 minus 1198694)1198694| lt 120576 It indicates that the 4thODRC law 1199064(119905) is very close to the optimal control law119906lowast(119905) It is obvious that the proposed approach requires a fewiterations to get the approximate ODRC law And it is morerobust about current and wave disturbances Simulationresults show that the proposed approach applied to the AUVsis effective
5 Conclusion
In this paper the disturbances rejection control problemfor the AUVs heading control system has been consid-ered and an ODRC approach has been designed For thedesign nonlinearities in the AUVs system are retainedand disturbances for the AUVs system are considered Byusing a successive approximation approach an ODRC law isproposed based on the quadratic optimal control theory
8 Mathematical Problems in Engineering
10 20 30 40 50 60 70 80 90 1000Time (s)
k = 1k = 2
k = 4
minus2
minus15
minus1
minus05
0
05
1
15
2
x2(t
)
Figure 5 The simulation curves of 1199092(119905)
10 20 30 40 50 60 70 80 90 1000Time (s)
minus2
minus15
minus1
minus05
0
05
1
15
2
k = 1k = 2
k = 4
x3(t
)
Figure 6 The simulation curves of 1199093(119905)
0 10 20 30 40 50 60 70 80 90 100Time (s)
k = 1k = 2
k = 4
minus3
minus2
minus1
0
1
2
3
4
x4(t
)
Figure 7 The simulation curves of 1199094(119905)
k = 1k = 2
k = 4
10 20 30 40 50 60 70 80 90 1000Time (s)
minus15
minus1
minus05
0
05
1
15
2
u(t
)
Figure 8 The simulation curves of 119906(119905)
which consists of the optimal feedback item the feedforwarddisturbances rejection item and the nonlinear compensatoryitem Finally the effectiveness of the proposed approach hasbeen illustrated by an AUV model
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This study was supported in part by the National Natu-ral Science Foundation of China (61673357 41276085 and61572448) and by the Natural Science Excellence Foundationof Shandong Province (ZR2015FM004 and ZR2014JL043)
References
[1] R B Wynn V A I Huvenne T P Le Bas et al ldquoAutonomousUnderwater Vehicles (AUVs) their past present and futurecontributions to the advancement of marine geosciencerdquoMarine Geology vol 352 pp 451ndash468 2014
[2] G Bartolini and A Pisano ldquoBlack-box position and attitudetracking for underwater vehicles by second-order sliding-mode techniquerdquo International Journal of Robust and NonlinearControl vol 20 no 14 pp 1594ndash1609 2010
[3] L Wang H-M Jia L-J Zhang and H-B Wang ldquoHorizontaltracking control for AUV based on nonlinear sliding moderdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo12) vol 1 pp 460ndash463 2012
[4] Z-P Yan D Wu J-J Zhou and X Zhang ldquoApplicationof extension integral variable structure control method onsimulation of AUV heading control systemrdquo in Proceedings ofthe 30th Chinese Control Conference vol 7 pp 2617ndash2621 July2011
[5] J Ghommam and M Saad ldquoBackstepping-based cooperativeand adaptive tracking control design for a group of underactu-ated AUVs in horizontal planrdquo International Journal of Controlvol 87 no 5 pp 1076ndash1093 2014
Mathematical Problems in Engineering 9
[6] L Lapierre and B Jouvencel ldquoRobust nonlinear path-followingcontrol of an AUVrdquo IEEE Journal of Oceanic Engineering vol 33no 2 pp 89ndash102 2008
[7] L Lapierre and D Soetanto ldquoNonlinear path-following controlof an AUVrdquoOcean Engineering vol 34 no 11-12 pp 1734ndash17442007
[8] J Petrich and D J Stilwell ldquoRobust control for an autonomousunderwater vehicle that suppresses pitch and yaw couplingrdquoOcean Engineering vol 38 no 1 pp 197ndash204 2011
[9] L Moreira and C G Soares ldquo1198672 and 119867infin designs for divingand course control of an Autonomous underwater vehicle inpresence of wavesrdquo Journal of Oceanic Engineering vol 33 no2 pp 69ndash88 2008
[10] B K Sahu and B Subudhi ldquoAdaptive tracking control ofan autonomous underwater vehiclerdquo International Journal ofAutomation and Computing vol 11 no 3 pp 299ndash307 2014
[11] B B Miao T S Li and W L Luo ldquoA DSC and MLP basedrobust adaptive NN tracking control for underwater vehiclerdquoNeurocomputing vol 111 pp 184ndash189 2013
[12] L-J Zhang X Qi and Y-J Pang ldquoAdaptive output feedbackcontrol based on DRFNN for AUVrdquoOcean Engineering vol 36no 9-10 pp 716ndash722 2009
[13] B Geranmehr and S R Nekoo ldquoNonlinear suboptimal controlof fully coupled non-affine six-DOF autonomous underwatervehicle using the state-dependent Riccati equationrdquo OceanEngineering vol 96 pp 248ndash257 2015
[14] D W Kim ldquoTracking of REMUS autonomous underwatervehicles with actuator saturationsrdquo Automatica vol 58 pp 15ndash21 2015
[15] F Repoulias and E Papadopoulos ldquoPlanar trajectory planningand tracking control design for underactuated AUVsrdquo OceanEngineering vol 34 no 11-12 pp 1650ndash1667 2007
[16] S-W Shi W-S Yan J Gao and W-B Li ldquoPath-followingcontrol of an AUV in the horizontal plane with constant oceancurrentsrdquo Acta Armamentarii vol 31 no 3 pp 375ndash379 2010
[17] X-Q Cheng J-Y Qu Z-P Yan and X-Q Bian ldquoHinfin robustfault-tolerant controller design for an autonomous underwatervehiclersquos navigation control systemrdquo Journal of Marine Scienceand Application vol 9 no 1 pp 87ndash92 2010
[18] S Liu DWang and E Poh ldquoNon-linear output feedback track-ing control for AUVs in shallow wave disturbance conditionrdquoInternational Journal of Control vol 81 no 11 pp 1806ndash18232008
[19] A P Aguiar and AM Pascoal ldquoDynamic positioning and way-point tracking of underactuated AUVs in the presence of oceancurrentsrdquo International Journal of Control vol 80 no 7 pp1092ndash1108 2007
[20] F-D Gao C-Y Pan Y-Y Han and X Zhang ldquoNonlineartrajectory tracking control of a new autonomous underwatervehicle in complex sea conditionsrdquo Journal of Central SouthUniversity vol 19 no 7 pp 1859ndash1868 2012
[21] L-J Zhang X Qi Y-J Pang and D-P Jiang ldquoAdaptiveoutput feedback control for trajectory tracking of AUV inwave disturbance conditionrdquo International Journal of WaveletsMultiresolution and Information Processing vol 11 no 3 pp 1ndash15 2013
[22] H Joe M Kim and S-C Yu ldquoSecond-order sliding-mode con-troller for autonomous underwater vehicle in the presence ofunknown disturbancesrdquo Nonlinear Dynamics vol 78 no 1 pp183ndash196 2014
[23] H-G Zhang Q-L Wei and Y-H Luo ldquoA novel infinite-timeoptimal tracking control scheme for a class of discrete-timenonlinear systems via the greedy HDP iteration algorithmrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 38 no 4 pp 937ndash942 2008
[24] Q-L Wei H-G Zhang D-R Liu and Y Zhao ldquoAn optimalcontrol scheme for a class of discrete-time nonlinear systemswith time delays using adaptive dynamic programmingrdquo ActaAutomatica Sinica vol 36 no 1 pp 121ndash129 2010
[25] Q-X Qu Y-H Luo and H-G Zhang ldquoRobust approximateoptimal tracking control of time-varying trajectory for nonlin-ear affine systemsrdquo Control Theory amp Applications vol 33 no 1pp 77ndash84 2016
[26] G-Y Tang ldquoSuboptimal control for nonlinear systems a suc-cessive approximation approachrdquo Systems and Control Lettersvol 54 no 5 pp 429ndash434 2005
[27] G-Y Tang and D-X Gao ldquoApproximation design of optimalcontrollers for nonlinear systems with sinusoidal disturbancesrdquoNonlinear Analysis Theory Methods amp Applications vol 66 no2 pp 403ndash414 2007
[28] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[29] T Prestero Verification of a Six-Degree of Freedom SimulationModel for the REMUS Autonomous Underwater Vehicles MIT2001
[30] O-E Fjellstad and T I Fossen ldquoPosition and attitude trackingof AUVrsquos a quaternion feedback approachrdquo IEEE Journal ofOceanic Engineering vol 19 no 4 pp 512ndash518 1994
[31] Q Yang H Su and G-Y Tang ldquoApproximate optimal trackingcontrol for near-surface AUVs with wave disturbancesrdquo Journalof Ocean University of China vol 15 no 5 pp 789ndash798 2016
[32] H Ma G-Y Tang and W Hu ldquoFeedforward and feedbackoptimal control with memory for offshore platforms underirregular wave forcesrdquo Journal of Sound and Vibration vol 328no 4-5 pp 369ndash381 2009
[33] B-L Zhang and Q-L Han ldquoNetwork-based modelling andactive control for offshore steel jacket platform with TMDmechanismsrdquo Journal of Sound and Vibration vol 333 pp6796ndash6814 2014
[34] S-Y Han D Wang Y-H Chen G-Y Tang and X-X YangldquoOptimal tracking control for discrete-time systems with mul-tiple input delays under sinusoidal disturbancesrdquo InternationalJournal of Control Automation and Systems vol 13 no 2 pp292ndash301 2015
[35] X-Q Cheng Research on the Robust Heading Control forAUV Based on Feedback Linearization in Near Surface HarbinEngineering University Harbin China 2008
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Earth frame
Y
Z
X
w (heave)
r (yaw)
q (pitch)p (roll)
u (surge)Body frame
n
s
r
(sway)
Figure 1 A schematic of the six-DOF AUVs model
output feedback controller was presented for AUVs namedODIN to track a desired trajectory with bounded errorsin wave disturbances condition In [22] a second-ordersliding mode controller was proposed for an AUV whichcan compensate for disturbances such as waves currents andbuoyancy force
In the field of modern control one of the key ideas isthe use of optimization and optimal control theory to give asystematic procedure for the design of feedback control sys-tems [23ndash25] LQR approach provides one of the most usefultechniques for designing state feedback controllers In orderto overcome disturbances and nonlinearities for theAUV sys-tem in this paper an ODRC approach is proposed based onthe quadratic optimal control theory Firstly the AUVsmodeland wave disturbances model are obtained and according todisturbances type an integral unit is introduced to eliminateits ocean current disturbances effect and a feedforwardcontrol is used to reject wave disturbances Secondly for theAUVs heading control system the coupled TPBV problemis derived from the maximum principle of optimal controltheory Then by using a successive approximation approach[26 27] the coupled TPBV problem is transformed intosolving two decoupled linear differential sequences in statevectors and adjoint vectors By iterative solution the ODRClaw is obtained and a Luenberger disturbances observer isconstructed to make it realizable The contribution in thispaper is the ODRC approach which is applied to designrejection controller for AUVs in shallow water environmentwhich only requires solving the Riccati equation and theSylvester matrix equation one time while mainly solving arecursion formula of adjoint vectors
This paper is organized as follows In Section 2 themodelof AUVs motion in horizontal plane is introduced and thesystem of shallow wave disturbances is constructed Section 3presented an ODRC design for AUVs Simulation validatesthe effectiveness of the designed controller under wavedisturbances in Section 4 Section 5 provides the concludingremarks
2 System Models
21 Mathematical Model of AUVs A schematic of the six-DOF AUVs model with related coordinate system is shownin Figure 1
The two reference frames are applied to the modelEarth-fixed frame and body-fixed frame Descriptions of theparameters are expressed in Table 1 [28ndash30]
The Earth-fixed frame is treated as an inertial frame Inorder to facilitate the analysis and synthesis for AUVs thecoupling effect between the roll surface movement and twocases of plane motion is usually ignored and then the vehiclemotion is divided into horizontal and verticalmovementTheheading motion equations in horizontal plane are given indimensional form as
119898[V + 119906119903 minus 119908119901] = sum119884119868119911 119903 + (119868119910 minus 119868119909) 119901119902 = sum119873
= (119902 sin120601 + 119903 cos120601)cos 120579
(1)
where
sum119884 = 121205881198714 [1198841015840119903 119903 + 1198841015840 + 1198841015840119901119902119901119902 + 1198841015840119903|119903|119903 |119903|] + 12
sdot 1205881198713 [1198841015840V V + 1198841015840119906119903119906119903 + 1198841015840119908119901119908119901+ 1198841015840V|119903| V|V|radicV2 + 1199082 |119903|] + 1
21205881198712 [1198841015840119906V119906V+ 1198841015840V|V|VradicV2 + 1199082] + (119882 minus 119861) cos 120579 sin120601 + 12sdot 120588119871211988410158401205751199031199062120575119903 + 119889
sum119873 = 121205881198715 [1198731015840119903 119903 + 1198731015840119901119902119901119902 + 1198731015840119903|119903|119903 |119903|] + 1
21205881198714 [1198731015840VV+ 1198731015840119906119903119906119903 + 1198731015840119908119901119908119901 + 1198731015840V119902V119902 + 1198731015840|V|119903radicV2 + 1199082119903] + 12sdot 1205881198713 [1198731015840119906V119906V + 1198731015840V|V|VradicV2 + 1199082] + 12120588119871311987310158401205751199031199062120575119903+ 119889
(2)
In system (1) 120575119903 is the control rudder angle 119871 119898 119882and 119861 respectively are the vehiclersquos length quality weightand buoyancy 120588 is the density of seawater 119868119909 119868119910 and 119868119911respectively are the vehiclersquos moment of inertia about 119909- 119910-and 119911-axis 119889 is the external disturbances 1198841015840(sdot) and1198731015840(sdot) arehydrodynamic coefficients
Suppose that the axial velocity 119906 = 1199060 is a given constantand the influences of the vertical plane motion and theparameters of the rolling motion are neglected then we have
(119898 minus 1212058811987131198841015840V) V + (minus1212058811987141198841015840119903) 119903 = (1212058811987121198841015840119906V1199060) V+ (1
2120588119871311988410158401199061199031199060 minus 1198981199060) 119903 + (121205881198712119884101584012057511990311990602) 120575119903
+ [1212058811987141198841015840119903|119903|119903 |119903| + 1212058811987131198841015840V|119903|V |119903| + 1212058811987121198841015840V|V|V |V|
Mathematical Problems in Engineering 3
Table 1 Notation used for AUVs
DOF Motionrotationdescription Forcesmoments Linearangular velocities PositionsEuler angles
1 In 119909-direction(surge) 119883 119906 119909
2 In 119910-direction(sway) 119884 V 119910
3 In 119911-direction(heave) 119885 119908 119911
4 About 119909-axis(roll) 119870 119901 120601
5 About 119910-axis(pitch) 119872 q 120579
6 About 119911-axis(yaw) N 119903 120595
+ (119882 minus 119861) cos 120579 sin120601] + 119889(minus1212058811987141198731015840V) V + (119868119911 minus 1212058811987151198731015840119903) 119903 = (1212058811987131198731015840119906V1199060) V
+ (12120588119871411987310158401199061199031199060) 119903 + (1
21205881198713119873101584012057511990311990602) 120575119903+ (1212058811987151198731015840119903|119903|119903 |119903| + 1212058811987141198731015840|V|119903 |V| 119903+ 1
212058811987131198731015840V|V|V |V|) + 119889 = 119903
(3)
Define the heading instruction as a constant 120595119903 and 119903 =0 heading error is 120595119890(119905) and then
120595119890 = 120595119903 minus 120595119890 = 119889 (120595119903 minus 120595)
119889119905 = minus = minus119903 (4)
Considering the ocean current disturbances an integral unitis introduced to eliminate the accumulated error
119868 = 120595119890 (5)Define the state vector as 119909 = [V 119903 120595119890 120595119868]119879 isin 1198774 the
control vector 120575119903(119905) = 119906(119905) and the dynamic model of theAUVs heading control system can be rewritten as follows
(119905) =[[[[[[
11988611 11988612 0 011988621 11988622 0 00 minus1 0 00 0 1 0
]]]]]]
[[[[[[
V
119903120595119890120595119868
]]]]]]
+[[[[[[
1198871119887200
]]]]]]120575119903 +
[[[[[[
1198891119889200
]]]]]]119889
+[[[[[[
1198911119891200
]]]]]]
= 119860119909 (119905) + 119861119906 (119905) + 119863119889 (119905) + 119891 (119909 119905) 119909 (1199050) = 1199090
(6)
where
[11988611 1198861211988621 11988622] = 119879minus11198601
[11988711198872] = 119879minus11198611
[11988911198892] = 119879minus1 [11]
[11989111198912] = 119879minus1 [[[
1212058811987141198841015840119903|119903|119903 |119903| +
1212058811987131198841015840V|119903|V |119903| +
1212058811987121198841015840V|V|V |V| + (119882 minus 119861) cos 120579 sin120601
1212058811987151198731015840119903|119903|119903 |119903| +
1212058811987141198731015840|V|119903 |V| 119903 +
1212058811987131198731015840V|V|V |V|
]]]
4 Mathematical Problems in Engineering
119879 = [[[119898 minus 1
212058811987131198841015840V minus1212058811987141198841015840119903minus1212058811987141198731015840V 119868119911 minus 1212058811987151198731015840119903
]]]
1198601 = [[[
1212058811987121198841015840119906V1199060
12120588119871311988410158401199061199031199060 minus 11989811990601
212058811987131198731015840119906V119906012120588119871411987310158401199061199031199060
]]]
1198611 = [[[
121205881198712119884101584012057511990311990602121205881198713119873101584012057511990311990602
]]]
(7)
119860 119861 and 119863 are defined in (6) 1199090 is the initial state and119891(119909 119905) is a limitary nonlinear vector which includes errorsand uncertainties
Remark 1 The limitary nonlinear vector 119891(119909 119905) satisfies thefollowing Lipschitz conditions
1003817100381710038171003817119891 (119909 119905)1003817100381710038171003817 le 120572 119909 1003817100381710038171003817119891 (119909 119905) minus 119891 (119909 119905)1003817100381710038171003817 le 120573 119909 minus 119909
forall119909 119909 isin Ω sub 1198774(8)
where 120572 and 120573 are positive constants
22 Disturbances Model of Wave Force The external distur-bances for AUVs are complex In the near water surfacethe wave force disturbances are the most important factor tothe AUVs system But ocean waves are always irregularIn present study the irregular long storm waves are oftensimplified [31ndash33] as follows
120577119886 (119905) =infinsum119894=1
120577119886119894 cos (119896119894120585 cos 120583 + 119896119894120578 sin 120583 minus 120596119894119905 + 120576119894) (9)
where 119896119894 is the 119894th component wave number 120596119894 is the 119894thcomponent wave frequency 120576119894 is a random phase angleuniformly distributed within 0 sim 2120587 120577119886119894 is the 119894th componentwave amplitude 120577119886119894 = radic2119878(120596119894)Δ120596 119878(120596119894) is the 119894th componentocean power spectrum density (PSD) function and Δ120596 is thefrequency discretization intervals of wave spectrum
The wave force disturbances have been representedaccording to the Pierson-Moskowitz (PM) spectrum writtenas
119878 (120596) = 1198601205965 exp(minus119861
1205964 ) (10)
where 119860 = 000811198922 119861 = 312(11986713)2 where 119892 is theacceleration due to gravity and 11986713 is the significant waveheight in meters
Considering the stationary waves on the sea surface let120585 = 0 and 120578 = 0 and choose multiple regular wavesuperposition to get randomwaves so the point long-crestedwaves are written as
120577119886 (119905) =119873sum119894=1
radic2119878 (120596119894) Δ120596 cos (120596119890119894119905 + 120576119894)
= 119873sum119894=1
119879119894 (120596119894) cos 120579119894(11)
where 119873 is the number of superimposed waves 120596119890119894 = 120596119894 minus(12059611989421199060119892) cos120573 is encounter angle frequency and 120573 is theencounter wave angle
We construct a system model to describe the irregularwave forces for the AUV in two-dimensional horizontalplane
Define V119894 = 119879119894(120596119894) cos(120579119894) as the horizontal velocity ofwater particle orbital motion
Let V(119905) = [V1(119905) sdot sdot sdot V119873(119905)]119879 taking the derivative ofV(119905) we have
V119894 = minus1205962119894 V119894 = minusΩV (12)
whereΩ = diag12059621 12059622 1205962119873Define 119908(119905) = [V(119905)119879 V(119905)119879]119879 then
(119905) = [ 0 119868minusΩ 0]119908 (119905) ≜ 119865119908 (119905)
V (119905) = [119868 0]119908 (119905) (13)
where 119868 is119873 dimensional unit matrix and 0 is119873 dimensionalzero matrix
Mathematical Problems in Engineering 5
According to the linear wave theory the wave forcedisturbances for the AUV system are as follows
119889 (119905) = 119873sum119894=1
119879119894 (120596119894) V119894 (119905)= [1198791 (1205961) sdot sdot sdot 119879119873 (120596119873)] [V1 (119905) sdot sdot sdot V119873 (119905)]119879= [1198791 (1205961) sdot sdot sdot 119879119873 (120596119873)] [119868 0]119908 (119905) ≜ 119867119908 (119905)
(14)
So the total wave force disturbances for AUVs can be de-scribed by the following system
(119905) = 119865119908 (119905) 119889 (119905) = 119867119908 (119905) (15)
where 119865 and 119867 are real constant matrices of appropriatedimensions
3 Controller Design
According to the dynamic model of the AUVs headingcontrol system (6) we select the following average quadraticperformance index
119869 = lim119879rarrinfin
1119879 int1198791199050
[119909119879 (119905) 119876119909 (119905) + 119906119879 (119905) 119877119906 (119905)] 119889119905 (16)
where119876 is theweightingmatrix for states symmetric positivesemidefinite and 119877 is the weighting matrix for the controlinputs symmetric positive definite 119876 and 119877 are properlyselected to shape the response characteristics in the closed-loop AUVs heading control system (6)
The optimal control problem is to search for a control law119906lowast(119905) for system (6) which makes the value of the averagequadratic performance index (16) minimum
Applying the maximum principle of the optimal controlproblem in (6) and (16) the optimal control law can bewritten as
119906lowast (119905) = minus119877minus1119861119879120582 (119905) (17)
where 120582(119905) is the solution to the following TPBV problem
minus (119905) = 119876119909 (119905) + 119860119879120582 (119905) + 119891119879119909 (119909 119905) 120582 (119905) (119905) = 119860119909 (119905) minus 119878120582 (119905) + 119891 (119909 119905) + 119863119889 (119905)
119909 (1199050) = 1199090120582 (infin) = 0
119905 gt 1199050
(18)
which is the optimality necessary condition where 119878 =119861119877minus1119861119879 and 119891119879119909 (119909 119905) = 120597119891119879(119909 119905)120597119909For the AUVs heading control system (6) and wave force
system (15) with the average quadratic performance index(16) we now state the following theorem
Theorem 2 Consider the optimal control problem describedby systems (6) and (15) with the average quadratic performanceindex (16) Then the ODRC law 119906lowast(119905) is existent and uniqueand its form is as follows
119906lowast (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + lim119896rarrinfin
119892(119896) (119905)] (19)
where 119875 is the unique positive-definite solution of the followingRiccati matrix equation
119860119879119875 + 119875119860 minus 119875119878119875 + 119876 = 0 (20)
119875 is the unique solution of the following Sylvester matrixequation
(119860 minus 119878119875)119879 119875 + 119875119865 = minus119875119863119867 (21)
Proof Let
120582 (119905) = 119875119909 (119905) + 1198751119889 (119905) + 119892 (119905) (22)
where 119909(119905) 119889(119905) and 119892(119905) are the state vector the wave forcedisturbances and the adjoint vector respectively
It is well known that119875 is the unique positive-definite solu-tion of Riccati matrix equation (20) Substituting 119875 into (21)then 119875 can be solved uniquely here 119875 = 1198751119867 When 119875 and119875 are got uniquely therefore we can obtain the ODRC lawuniquely as follows
119906lowast (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892 (119905)] (23)
where 119892(119905) and 119909(119905) are the solutions of the followingequations
119892 (119905) = (119875119878 minus 119860119879) 119892 (119905) minus 119875119891 (119909 119905)minus 119891119879119909 (119909 119905) [119875119909 (119905) + 119875119908 (119905) + 119892 (119905)]
(119905) = (119860 minus 119878119875) 119909 (119905) + (119863119867 minus 119878119875)119908 (119905) minus 119878119892 (119905)+ 119891 (119909 119905)
119892 (infin) = 0119909 (1199050) = 1199090
(24)
and 119908(119905) is the solution of the wave forces system (15)By using the successive approximation approach [26 27
31 34] we construct the adjoint vector sequence
119892(0) (119905) equiv 0119892(119896) (119905)= (119875119878 minus 119860119879) 119892(119896) (119905) minus 119875119891 (119909(119896minus1) 119905)
minus 119891119879119909 (119909(119896minus1) 119905) [119875119909(119896minus1) (119905) + 119875119908 (119905) + 119892(119896minus1) (119905)] lim119879rarrinfin
119892(119896) (119879) = 0119896 = 1 2
(25)
6 Mathematical Problems in Engineering
and the state equation sequence
119909(0) (119905) equiv 0(119896) (119905) = (119860 minus 119878119875) 119909(119896) (119905) + (119863119867 minus 119878119875)119908 (119905)
minus 119878119892(119896) (119905) + 119891 (119909(119896minus1) 119905) 119909(119896) (1199050) = 1199090
119896 = 1 2
(26)
It can be proved that the adjoint vector solution sequence119892(119896)(119905) in (25) uniformly converges to 119892(119905) and the statevector solution sequence 119909(119896)(119905) in (26) uniformly convergesto 119909(119905) [26 27 31 34]
When 119896 rarr infin the limits of 119909(119896)(119905) and 119892(119896)(119905) becomethe optimal state vector 119909lowast(119905) and the optimal adjoint vector119892(119905)
Define 119892(infin)(119905) = lim119896rarrinfin119892(119896)(119905) then the ODRC law isrewritten as (19) This completes the proof
Remark 3 It is usually impossible to obtain the exact adjointvector 119892(infin)(119905) when designing the ODRC law in practice Inmany cases it may be better to choose an 119892(119873)(119905) as theapproximation of 119892(infin)(119905) where 119873 depends on a concreteerror coefficient 120576 gt 0The119873th-orderODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] (27)
Remark 4 The 119873th-order ODRC law consists of a feedbackterm 119875119909(119905) a feedforward disturbances rejection term 119875119908(119905)and a nonlinear compensatory term 119892(119873)(119905)Remark 5 Thewave disturbances are difficult to bemeasuredand obtained and 119908(119905) is the state vectors of system (15)the ODRC law is physically unrealizable in practice Sowe construct a Luenberger disturbances observer to make itrealizable as follows
119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (28)
where 119908(119905) is the observation value of 119908(119905) and 119871 is theobserver matrix of appropriate dimensions We can choosethe appropriate dimensions matrix 119871 and the eigenvalues ofthe matrix (119865 minus 119871119867) have negative real parts Then the 119873th-order ODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] 119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (29)
4 Example and Simulation
41 Simulation Model and Parameters for AUVs and WaveForce Disturbances In this section a simulation study is car-ried out using a typical AUV model [35] to demonstrate theperformance of the proposed approach The hydrodynamiccoefficients of an AUV are shown in Table 2
Table 2 Hydrodynamic coefficients of the AUV
Name Symbol Numerical UnitQuality 119898 67831 kgLength 119871 5720 mSea-water density 120588 1025 kgm3
Dimensionlesscoefficient of swayforce
1198841015840 V minus39854
10minus3
1198841015840 119903 125671198841015840V|V| minus257041198841015840119903|119903| 99811198841015840119906V minus418581198841015840119906119903 104351198841015840120575119903 18509
Dimensionlesscoefficient of yawmoment
1198731015840 V minus38721198731015840 119903 minus21051198731015840V|V| 174801198731015840119903|119903| minus64631198731015840119906V minus28781198731015840119906119903 minus94361198731015840120575119903 minus9754
Assuming that the axial velocity is 1199060 = 2ms thesignificant wave height is 11986713 = 4m and encounter anglefrequency of wave is 06320 rads and 10470 rads then thePSD of the wave height is shown in Figure 2
And the wave force can be calculated from (11) which isshown in Figure 3
The matrices and vector of the AUVs heading controlsystem (6) are as follows
119860 =[[[[[[
minus01966 minus11472 0 0minus00780 minus06558 0 0
0 minus1 0 00 0 1 0
]]]]]]
119861 =[[[[[[
0196202165
00
]]]]]]
119863 =[[[[[[
0000200273
00
]]]]]]
119891 (119909 119905) =[[[[[[
minus1697711990912 + 2439611990922 minus 26767119909111990920045811990912 minus 0554111990922 minus 0036511990911199092
00
]]]]]]
(30)
Mathematical Problems in Engineering 7
Table 3 119869119873 and Δ119869 at different iteration times
119896 1 2 3 4 5119869119873 152455 113397 101086 97592 97452Δ119869 03444 01218 00358 00014
05 1 15 2 25 30Frequency (rads)
0
1
2
3
4
5
6
7
8
PSD
of w
ave h
eigh
t (G
2s
)
w = 06320 radsw = 10470 rads
Figure 2 PSD of wave height
The parameters for the average quadratic performanceindex (16) are chosen as
119876 =[[[[[[
1 0 0 00 1 0 00 0 1 00 0 0 1
]]]]]]
119877 = 5
(31)
By solving (20) and (21) we obtain
119875 =[[[[[[
65444 minus139363 31885 02422minus139363 796598 minus568132 minus10547831885 minus568132 569366 13129302422 minus105478 131293 52210
]]]]]]
119875 =[[[[[[
minus12713 minus06152 minus112055 minus54904195865 91021 574458 307596minus196954 minus95852 minus349479 minus209735minus45788 minus24965 minus42104 minus34488
]]]]]]
(32)
42 Simulation Results and Analysis Based on the AUVmodel and parameters the state vector is considered as119909 = [V 119903 120595119890 120595119868]119879 the simulation curves 119909(119905) and 119906(119905) atdifferent iteration times are shown in Figures 4ndash8
The average quadratic performance index values 119869119873 anderrors Δ119869 = |(119869119873minus1 minus 119869119873)119869119873| lt 120576 at different iteration timesare listed in Table 3 and 120576 is the control precision
10 20 30 40 50 60 70 80 90 1000Time (s)
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Am
plitu
de (m
)
Figure 3 Numerical simulation of the random wave force
10 20 30 40 50 60 70 80 90 1000Time (s)
minus3
minus2
minus1
0
1
2
3
k = 1k = 2
k = 4
x1(t
)
Figure 4 The simulation curves of 1199091(119905)
From Table 3 it can be seen clearly that the averagequadratic performance index values decrease as iterationtimes increase and tend to a deterministic optimal value 119869lowastultimately If we choose the control precision 120576 = 005 thenthe relative error of the average quadratic performance indexvalues satisfies |(1198693 minus 1198694)1198694| lt 120576 It indicates that the 4thODRC law 1199064(119905) is very close to the optimal control law119906lowast(119905) It is obvious that the proposed approach requires a fewiterations to get the approximate ODRC law And it is morerobust about current and wave disturbances Simulationresults show that the proposed approach applied to the AUVsis effective
5 Conclusion
In this paper the disturbances rejection control problemfor the AUVs heading control system has been consid-ered and an ODRC approach has been designed For thedesign nonlinearities in the AUVs system are retainedand disturbances for the AUVs system are considered Byusing a successive approximation approach an ODRC law isproposed based on the quadratic optimal control theory
8 Mathematical Problems in Engineering
10 20 30 40 50 60 70 80 90 1000Time (s)
k = 1k = 2
k = 4
minus2
minus15
minus1
minus05
0
05
1
15
2
x2(t
)
Figure 5 The simulation curves of 1199092(119905)
10 20 30 40 50 60 70 80 90 1000Time (s)
minus2
minus15
minus1
minus05
0
05
1
15
2
k = 1k = 2
k = 4
x3(t
)
Figure 6 The simulation curves of 1199093(119905)
0 10 20 30 40 50 60 70 80 90 100Time (s)
k = 1k = 2
k = 4
minus3
minus2
minus1
0
1
2
3
4
x4(t
)
Figure 7 The simulation curves of 1199094(119905)
k = 1k = 2
k = 4
10 20 30 40 50 60 70 80 90 1000Time (s)
minus15
minus1
minus05
0
05
1
15
2
u(t
)
Figure 8 The simulation curves of 119906(119905)
which consists of the optimal feedback item the feedforwarddisturbances rejection item and the nonlinear compensatoryitem Finally the effectiveness of the proposed approach hasbeen illustrated by an AUV model
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This study was supported in part by the National Natu-ral Science Foundation of China (61673357 41276085 and61572448) and by the Natural Science Excellence Foundationof Shandong Province (ZR2015FM004 and ZR2014JL043)
References
[1] R B Wynn V A I Huvenne T P Le Bas et al ldquoAutonomousUnderwater Vehicles (AUVs) their past present and futurecontributions to the advancement of marine geosciencerdquoMarine Geology vol 352 pp 451ndash468 2014
[2] G Bartolini and A Pisano ldquoBlack-box position and attitudetracking for underwater vehicles by second-order sliding-mode techniquerdquo International Journal of Robust and NonlinearControl vol 20 no 14 pp 1594ndash1609 2010
[3] L Wang H-M Jia L-J Zhang and H-B Wang ldquoHorizontaltracking control for AUV based on nonlinear sliding moderdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo12) vol 1 pp 460ndash463 2012
[4] Z-P Yan D Wu J-J Zhou and X Zhang ldquoApplicationof extension integral variable structure control method onsimulation of AUV heading control systemrdquo in Proceedings ofthe 30th Chinese Control Conference vol 7 pp 2617ndash2621 July2011
[5] J Ghommam and M Saad ldquoBackstepping-based cooperativeand adaptive tracking control design for a group of underactu-ated AUVs in horizontal planrdquo International Journal of Controlvol 87 no 5 pp 1076ndash1093 2014
Mathematical Problems in Engineering 9
[6] L Lapierre and B Jouvencel ldquoRobust nonlinear path-followingcontrol of an AUVrdquo IEEE Journal of Oceanic Engineering vol 33no 2 pp 89ndash102 2008
[7] L Lapierre and D Soetanto ldquoNonlinear path-following controlof an AUVrdquoOcean Engineering vol 34 no 11-12 pp 1734ndash17442007
[8] J Petrich and D J Stilwell ldquoRobust control for an autonomousunderwater vehicle that suppresses pitch and yaw couplingrdquoOcean Engineering vol 38 no 1 pp 197ndash204 2011
[9] L Moreira and C G Soares ldquo1198672 and 119867infin designs for divingand course control of an Autonomous underwater vehicle inpresence of wavesrdquo Journal of Oceanic Engineering vol 33 no2 pp 69ndash88 2008
[10] B K Sahu and B Subudhi ldquoAdaptive tracking control ofan autonomous underwater vehiclerdquo International Journal ofAutomation and Computing vol 11 no 3 pp 299ndash307 2014
[11] B B Miao T S Li and W L Luo ldquoA DSC and MLP basedrobust adaptive NN tracking control for underwater vehiclerdquoNeurocomputing vol 111 pp 184ndash189 2013
[12] L-J Zhang X Qi and Y-J Pang ldquoAdaptive output feedbackcontrol based on DRFNN for AUVrdquoOcean Engineering vol 36no 9-10 pp 716ndash722 2009
[13] B Geranmehr and S R Nekoo ldquoNonlinear suboptimal controlof fully coupled non-affine six-DOF autonomous underwatervehicle using the state-dependent Riccati equationrdquo OceanEngineering vol 96 pp 248ndash257 2015
[14] D W Kim ldquoTracking of REMUS autonomous underwatervehicles with actuator saturationsrdquo Automatica vol 58 pp 15ndash21 2015
[15] F Repoulias and E Papadopoulos ldquoPlanar trajectory planningand tracking control design for underactuated AUVsrdquo OceanEngineering vol 34 no 11-12 pp 1650ndash1667 2007
[16] S-W Shi W-S Yan J Gao and W-B Li ldquoPath-followingcontrol of an AUV in the horizontal plane with constant oceancurrentsrdquo Acta Armamentarii vol 31 no 3 pp 375ndash379 2010
[17] X-Q Cheng J-Y Qu Z-P Yan and X-Q Bian ldquoHinfin robustfault-tolerant controller design for an autonomous underwatervehiclersquos navigation control systemrdquo Journal of Marine Scienceand Application vol 9 no 1 pp 87ndash92 2010
[18] S Liu DWang and E Poh ldquoNon-linear output feedback track-ing control for AUVs in shallow wave disturbance conditionrdquoInternational Journal of Control vol 81 no 11 pp 1806ndash18232008
[19] A P Aguiar and AM Pascoal ldquoDynamic positioning and way-point tracking of underactuated AUVs in the presence of oceancurrentsrdquo International Journal of Control vol 80 no 7 pp1092ndash1108 2007
[20] F-D Gao C-Y Pan Y-Y Han and X Zhang ldquoNonlineartrajectory tracking control of a new autonomous underwatervehicle in complex sea conditionsrdquo Journal of Central SouthUniversity vol 19 no 7 pp 1859ndash1868 2012
[21] L-J Zhang X Qi Y-J Pang and D-P Jiang ldquoAdaptiveoutput feedback control for trajectory tracking of AUV inwave disturbance conditionrdquo International Journal of WaveletsMultiresolution and Information Processing vol 11 no 3 pp 1ndash15 2013
[22] H Joe M Kim and S-C Yu ldquoSecond-order sliding-mode con-troller for autonomous underwater vehicle in the presence ofunknown disturbancesrdquo Nonlinear Dynamics vol 78 no 1 pp183ndash196 2014
[23] H-G Zhang Q-L Wei and Y-H Luo ldquoA novel infinite-timeoptimal tracking control scheme for a class of discrete-timenonlinear systems via the greedy HDP iteration algorithmrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 38 no 4 pp 937ndash942 2008
[24] Q-L Wei H-G Zhang D-R Liu and Y Zhao ldquoAn optimalcontrol scheme for a class of discrete-time nonlinear systemswith time delays using adaptive dynamic programmingrdquo ActaAutomatica Sinica vol 36 no 1 pp 121ndash129 2010
[25] Q-X Qu Y-H Luo and H-G Zhang ldquoRobust approximateoptimal tracking control of time-varying trajectory for nonlin-ear affine systemsrdquo Control Theory amp Applications vol 33 no 1pp 77ndash84 2016
[26] G-Y Tang ldquoSuboptimal control for nonlinear systems a suc-cessive approximation approachrdquo Systems and Control Lettersvol 54 no 5 pp 429ndash434 2005
[27] G-Y Tang and D-X Gao ldquoApproximation design of optimalcontrollers for nonlinear systems with sinusoidal disturbancesrdquoNonlinear Analysis Theory Methods amp Applications vol 66 no2 pp 403ndash414 2007
[28] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[29] T Prestero Verification of a Six-Degree of Freedom SimulationModel for the REMUS Autonomous Underwater Vehicles MIT2001
[30] O-E Fjellstad and T I Fossen ldquoPosition and attitude trackingof AUVrsquos a quaternion feedback approachrdquo IEEE Journal ofOceanic Engineering vol 19 no 4 pp 512ndash518 1994
[31] Q Yang H Su and G-Y Tang ldquoApproximate optimal trackingcontrol for near-surface AUVs with wave disturbancesrdquo Journalof Ocean University of China vol 15 no 5 pp 789ndash798 2016
[32] H Ma G-Y Tang and W Hu ldquoFeedforward and feedbackoptimal control with memory for offshore platforms underirregular wave forcesrdquo Journal of Sound and Vibration vol 328no 4-5 pp 369ndash381 2009
[33] B-L Zhang and Q-L Han ldquoNetwork-based modelling andactive control for offshore steel jacket platform with TMDmechanismsrdquo Journal of Sound and Vibration vol 333 pp6796ndash6814 2014
[34] S-Y Han D Wang Y-H Chen G-Y Tang and X-X YangldquoOptimal tracking control for discrete-time systems with mul-tiple input delays under sinusoidal disturbancesrdquo InternationalJournal of Control Automation and Systems vol 13 no 2 pp292ndash301 2015
[35] X-Q Cheng Research on the Robust Heading Control forAUV Based on Feedback Linearization in Near Surface HarbinEngineering University Harbin China 2008
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Table 1 Notation used for AUVs
DOF Motionrotationdescription Forcesmoments Linearangular velocities PositionsEuler angles
1 In 119909-direction(surge) 119883 119906 119909
2 In 119910-direction(sway) 119884 V 119910
3 In 119911-direction(heave) 119885 119908 119911
4 About 119909-axis(roll) 119870 119901 120601
5 About 119910-axis(pitch) 119872 q 120579
6 About 119911-axis(yaw) N 119903 120595
+ (119882 minus 119861) cos 120579 sin120601] + 119889(minus1212058811987141198731015840V) V + (119868119911 minus 1212058811987151198731015840119903) 119903 = (1212058811987131198731015840119906V1199060) V
+ (12120588119871411987310158401199061199031199060) 119903 + (1
21205881198713119873101584012057511990311990602) 120575119903+ (1212058811987151198731015840119903|119903|119903 |119903| + 1212058811987141198731015840|V|119903 |V| 119903+ 1
212058811987131198731015840V|V|V |V|) + 119889 = 119903
(3)
Define the heading instruction as a constant 120595119903 and 119903 =0 heading error is 120595119890(119905) and then
120595119890 = 120595119903 minus 120595119890 = 119889 (120595119903 minus 120595)
119889119905 = minus = minus119903 (4)
Considering the ocean current disturbances an integral unitis introduced to eliminate the accumulated error
119868 = 120595119890 (5)Define the state vector as 119909 = [V 119903 120595119890 120595119868]119879 isin 1198774 the
control vector 120575119903(119905) = 119906(119905) and the dynamic model of theAUVs heading control system can be rewritten as follows
(119905) =[[[[[[
11988611 11988612 0 011988621 11988622 0 00 minus1 0 00 0 1 0
]]]]]]
[[[[[[
V
119903120595119890120595119868
]]]]]]
+[[[[[[
1198871119887200
]]]]]]120575119903 +
[[[[[[
1198891119889200
]]]]]]119889
+[[[[[[
1198911119891200
]]]]]]
= 119860119909 (119905) + 119861119906 (119905) + 119863119889 (119905) + 119891 (119909 119905) 119909 (1199050) = 1199090
(6)
where
[11988611 1198861211988621 11988622] = 119879minus11198601
[11988711198872] = 119879minus11198611
[11988911198892] = 119879minus1 [11]
[11989111198912] = 119879minus1 [[[
1212058811987141198841015840119903|119903|119903 |119903| +
1212058811987131198841015840V|119903|V |119903| +
1212058811987121198841015840V|V|V |V| + (119882 minus 119861) cos 120579 sin120601
1212058811987151198731015840119903|119903|119903 |119903| +
1212058811987141198731015840|V|119903 |V| 119903 +
1212058811987131198731015840V|V|V |V|
]]]
4 Mathematical Problems in Engineering
119879 = [[[119898 minus 1
212058811987131198841015840V minus1212058811987141198841015840119903minus1212058811987141198731015840V 119868119911 minus 1212058811987151198731015840119903
]]]
1198601 = [[[
1212058811987121198841015840119906V1199060
12120588119871311988410158401199061199031199060 minus 11989811990601
212058811987131198731015840119906V119906012120588119871411987310158401199061199031199060
]]]
1198611 = [[[
121205881198712119884101584012057511990311990602121205881198713119873101584012057511990311990602
]]]
(7)
119860 119861 and 119863 are defined in (6) 1199090 is the initial state and119891(119909 119905) is a limitary nonlinear vector which includes errorsand uncertainties
Remark 1 The limitary nonlinear vector 119891(119909 119905) satisfies thefollowing Lipschitz conditions
1003817100381710038171003817119891 (119909 119905)1003817100381710038171003817 le 120572 119909 1003817100381710038171003817119891 (119909 119905) minus 119891 (119909 119905)1003817100381710038171003817 le 120573 119909 minus 119909
forall119909 119909 isin Ω sub 1198774(8)
where 120572 and 120573 are positive constants
22 Disturbances Model of Wave Force The external distur-bances for AUVs are complex In the near water surfacethe wave force disturbances are the most important factor tothe AUVs system But ocean waves are always irregularIn present study the irregular long storm waves are oftensimplified [31ndash33] as follows
120577119886 (119905) =infinsum119894=1
120577119886119894 cos (119896119894120585 cos 120583 + 119896119894120578 sin 120583 minus 120596119894119905 + 120576119894) (9)
where 119896119894 is the 119894th component wave number 120596119894 is the 119894thcomponent wave frequency 120576119894 is a random phase angleuniformly distributed within 0 sim 2120587 120577119886119894 is the 119894th componentwave amplitude 120577119886119894 = radic2119878(120596119894)Δ120596 119878(120596119894) is the 119894th componentocean power spectrum density (PSD) function and Δ120596 is thefrequency discretization intervals of wave spectrum
The wave force disturbances have been representedaccording to the Pierson-Moskowitz (PM) spectrum writtenas
119878 (120596) = 1198601205965 exp(minus119861
1205964 ) (10)
where 119860 = 000811198922 119861 = 312(11986713)2 where 119892 is theacceleration due to gravity and 11986713 is the significant waveheight in meters
Considering the stationary waves on the sea surface let120585 = 0 and 120578 = 0 and choose multiple regular wavesuperposition to get randomwaves so the point long-crestedwaves are written as
120577119886 (119905) =119873sum119894=1
radic2119878 (120596119894) Δ120596 cos (120596119890119894119905 + 120576119894)
= 119873sum119894=1
119879119894 (120596119894) cos 120579119894(11)
where 119873 is the number of superimposed waves 120596119890119894 = 120596119894 minus(12059611989421199060119892) cos120573 is encounter angle frequency and 120573 is theencounter wave angle
We construct a system model to describe the irregularwave forces for the AUV in two-dimensional horizontalplane
Define V119894 = 119879119894(120596119894) cos(120579119894) as the horizontal velocity ofwater particle orbital motion
Let V(119905) = [V1(119905) sdot sdot sdot V119873(119905)]119879 taking the derivative ofV(119905) we have
V119894 = minus1205962119894 V119894 = minusΩV (12)
whereΩ = diag12059621 12059622 1205962119873Define 119908(119905) = [V(119905)119879 V(119905)119879]119879 then
(119905) = [ 0 119868minusΩ 0]119908 (119905) ≜ 119865119908 (119905)
V (119905) = [119868 0]119908 (119905) (13)
where 119868 is119873 dimensional unit matrix and 0 is119873 dimensionalzero matrix
Mathematical Problems in Engineering 5
According to the linear wave theory the wave forcedisturbances for the AUV system are as follows
119889 (119905) = 119873sum119894=1
119879119894 (120596119894) V119894 (119905)= [1198791 (1205961) sdot sdot sdot 119879119873 (120596119873)] [V1 (119905) sdot sdot sdot V119873 (119905)]119879= [1198791 (1205961) sdot sdot sdot 119879119873 (120596119873)] [119868 0]119908 (119905) ≜ 119867119908 (119905)
(14)
So the total wave force disturbances for AUVs can be de-scribed by the following system
(119905) = 119865119908 (119905) 119889 (119905) = 119867119908 (119905) (15)
where 119865 and 119867 are real constant matrices of appropriatedimensions
3 Controller Design
According to the dynamic model of the AUVs headingcontrol system (6) we select the following average quadraticperformance index
119869 = lim119879rarrinfin
1119879 int1198791199050
[119909119879 (119905) 119876119909 (119905) + 119906119879 (119905) 119877119906 (119905)] 119889119905 (16)
where119876 is theweightingmatrix for states symmetric positivesemidefinite and 119877 is the weighting matrix for the controlinputs symmetric positive definite 119876 and 119877 are properlyselected to shape the response characteristics in the closed-loop AUVs heading control system (6)
The optimal control problem is to search for a control law119906lowast(119905) for system (6) which makes the value of the averagequadratic performance index (16) minimum
Applying the maximum principle of the optimal controlproblem in (6) and (16) the optimal control law can bewritten as
119906lowast (119905) = minus119877minus1119861119879120582 (119905) (17)
where 120582(119905) is the solution to the following TPBV problem
minus (119905) = 119876119909 (119905) + 119860119879120582 (119905) + 119891119879119909 (119909 119905) 120582 (119905) (119905) = 119860119909 (119905) minus 119878120582 (119905) + 119891 (119909 119905) + 119863119889 (119905)
119909 (1199050) = 1199090120582 (infin) = 0
119905 gt 1199050
(18)
which is the optimality necessary condition where 119878 =119861119877minus1119861119879 and 119891119879119909 (119909 119905) = 120597119891119879(119909 119905)120597119909For the AUVs heading control system (6) and wave force
system (15) with the average quadratic performance index(16) we now state the following theorem
Theorem 2 Consider the optimal control problem describedby systems (6) and (15) with the average quadratic performanceindex (16) Then the ODRC law 119906lowast(119905) is existent and uniqueand its form is as follows
119906lowast (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + lim119896rarrinfin
119892(119896) (119905)] (19)
where 119875 is the unique positive-definite solution of the followingRiccati matrix equation
119860119879119875 + 119875119860 minus 119875119878119875 + 119876 = 0 (20)
119875 is the unique solution of the following Sylvester matrixequation
(119860 minus 119878119875)119879 119875 + 119875119865 = minus119875119863119867 (21)
Proof Let
120582 (119905) = 119875119909 (119905) + 1198751119889 (119905) + 119892 (119905) (22)
where 119909(119905) 119889(119905) and 119892(119905) are the state vector the wave forcedisturbances and the adjoint vector respectively
It is well known that119875 is the unique positive-definite solu-tion of Riccati matrix equation (20) Substituting 119875 into (21)then 119875 can be solved uniquely here 119875 = 1198751119867 When 119875 and119875 are got uniquely therefore we can obtain the ODRC lawuniquely as follows
119906lowast (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892 (119905)] (23)
where 119892(119905) and 119909(119905) are the solutions of the followingequations
119892 (119905) = (119875119878 minus 119860119879) 119892 (119905) minus 119875119891 (119909 119905)minus 119891119879119909 (119909 119905) [119875119909 (119905) + 119875119908 (119905) + 119892 (119905)]
(119905) = (119860 minus 119878119875) 119909 (119905) + (119863119867 minus 119878119875)119908 (119905) minus 119878119892 (119905)+ 119891 (119909 119905)
119892 (infin) = 0119909 (1199050) = 1199090
(24)
and 119908(119905) is the solution of the wave forces system (15)By using the successive approximation approach [26 27
31 34] we construct the adjoint vector sequence
119892(0) (119905) equiv 0119892(119896) (119905)= (119875119878 minus 119860119879) 119892(119896) (119905) minus 119875119891 (119909(119896minus1) 119905)
minus 119891119879119909 (119909(119896minus1) 119905) [119875119909(119896minus1) (119905) + 119875119908 (119905) + 119892(119896minus1) (119905)] lim119879rarrinfin
119892(119896) (119879) = 0119896 = 1 2
(25)
6 Mathematical Problems in Engineering
and the state equation sequence
119909(0) (119905) equiv 0(119896) (119905) = (119860 minus 119878119875) 119909(119896) (119905) + (119863119867 minus 119878119875)119908 (119905)
minus 119878119892(119896) (119905) + 119891 (119909(119896minus1) 119905) 119909(119896) (1199050) = 1199090
119896 = 1 2
(26)
It can be proved that the adjoint vector solution sequence119892(119896)(119905) in (25) uniformly converges to 119892(119905) and the statevector solution sequence 119909(119896)(119905) in (26) uniformly convergesto 119909(119905) [26 27 31 34]
When 119896 rarr infin the limits of 119909(119896)(119905) and 119892(119896)(119905) becomethe optimal state vector 119909lowast(119905) and the optimal adjoint vector119892(119905)
Define 119892(infin)(119905) = lim119896rarrinfin119892(119896)(119905) then the ODRC law isrewritten as (19) This completes the proof
Remark 3 It is usually impossible to obtain the exact adjointvector 119892(infin)(119905) when designing the ODRC law in practice Inmany cases it may be better to choose an 119892(119873)(119905) as theapproximation of 119892(infin)(119905) where 119873 depends on a concreteerror coefficient 120576 gt 0The119873th-orderODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] (27)
Remark 4 The 119873th-order ODRC law consists of a feedbackterm 119875119909(119905) a feedforward disturbances rejection term 119875119908(119905)and a nonlinear compensatory term 119892(119873)(119905)Remark 5 Thewave disturbances are difficult to bemeasuredand obtained and 119908(119905) is the state vectors of system (15)the ODRC law is physically unrealizable in practice Sowe construct a Luenberger disturbances observer to make itrealizable as follows
119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (28)
where 119908(119905) is the observation value of 119908(119905) and 119871 is theobserver matrix of appropriate dimensions We can choosethe appropriate dimensions matrix 119871 and the eigenvalues ofthe matrix (119865 minus 119871119867) have negative real parts Then the 119873th-order ODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] 119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (29)
4 Example and Simulation
41 Simulation Model and Parameters for AUVs and WaveForce Disturbances In this section a simulation study is car-ried out using a typical AUV model [35] to demonstrate theperformance of the proposed approach The hydrodynamiccoefficients of an AUV are shown in Table 2
Table 2 Hydrodynamic coefficients of the AUV
Name Symbol Numerical UnitQuality 119898 67831 kgLength 119871 5720 mSea-water density 120588 1025 kgm3
Dimensionlesscoefficient of swayforce
1198841015840 V minus39854
10minus3
1198841015840 119903 125671198841015840V|V| minus257041198841015840119903|119903| 99811198841015840119906V minus418581198841015840119906119903 104351198841015840120575119903 18509
Dimensionlesscoefficient of yawmoment
1198731015840 V minus38721198731015840 119903 minus21051198731015840V|V| 174801198731015840119903|119903| minus64631198731015840119906V minus28781198731015840119906119903 minus94361198731015840120575119903 minus9754
Assuming that the axial velocity is 1199060 = 2ms thesignificant wave height is 11986713 = 4m and encounter anglefrequency of wave is 06320 rads and 10470 rads then thePSD of the wave height is shown in Figure 2
And the wave force can be calculated from (11) which isshown in Figure 3
The matrices and vector of the AUVs heading controlsystem (6) are as follows
119860 =[[[[[[
minus01966 minus11472 0 0minus00780 minus06558 0 0
0 minus1 0 00 0 1 0
]]]]]]
119861 =[[[[[[
0196202165
00
]]]]]]
119863 =[[[[[[
0000200273
00
]]]]]]
119891 (119909 119905) =[[[[[[
minus1697711990912 + 2439611990922 minus 26767119909111990920045811990912 minus 0554111990922 minus 0036511990911199092
00
]]]]]]
(30)
Mathematical Problems in Engineering 7
Table 3 119869119873 and Δ119869 at different iteration times
119896 1 2 3 4 5119869119873 152455 113397 101086 97592 97452Δ119869 03444 01218 00358 00014
05 1 15 2 25 30Frequency (rads)
0
1
2
3
4
5
6
7
8
PSD
of w
ave h
eigh
t (G
2s
)
w = 06320 radsw = 10470 rads
Figure 2 PSD of wave height
The parameters for the average quadratic performanceindex (16) are chosen as
119876 =[[[[[[
1 0 0 00 1 0 00 0 1 00 0 0 1
]]]]]]
119877 = 5
(31)
By solving (20) and (21) we obtain
119875 =[[[[[[
65444 minus139363 31885 02422minus139363 796598 minus568132 minus10547831885 minus568132 569366 13129302422 minus105478 131293 52210
]]]]]]
119875 =[[[[[[
minus12713 minus06152 minus112055 minus54904195865 91021 574458 307596minus196954 minus95852 minus349479 minus209735minus45788 minus24965 minus42104 minus34488
]]]]]]
(32)
42 Simulation Results and Analysis Based on the AUVmodel and parameters the state vector is considered as119909 = [V 119903 120595119890 120595119868]119879 the simulation curves 119909(119905) and 119906(119905) atdifferent iteration times are shown in Figures 4ndash8
The average quadratic performance index values 119869119873 anderrors Δ119869 = |(119869119873minus1 minus 119869119873)119869119873| lt 120576 at different iteration timesare listed in Table 3 and 120576 is the control precision
10 20 30 40 50 60 70 80 90 1000Time (s)
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Am
plitu
de (m
)
Figure 3 Numerical simulation of the random wave force
10 20 30 40 50 60 70 80 90 1000Time (s)
minus3
minus2
minus1
0
1
2
3
k = 1k = 2
k = 4
x1(t
)
Figure 4 The simulation curves of 1199091(119905)
From Table 3 it can be seen clearly that the averagequadratic performance index values decrease as iterationtimes increase and tend to a deterministic optimal value 119869lowastultimately If we choose the control precision 120576 = 005 thenthe relative error of the average quadratic performance indexvalues satisfies |(1198693 minus 1198694)1198694| lt 120576 It indicates that the 4thODRC law 1199064(119905) is very close to the optimal control law119906lowast(119905) It is obvious that the proposed approach requires a fewiterations to get the approximate ODRC law And it is morerobust about current and wave disturbances Simulationresults show that the proposed approach applied to the AUVsis effective
5 Conclusion
In this paper the disturbances rejection control problemfor the AUVs heading control system has been consid-ered and an ODRC approach has been designed For thedesign nonlinearities in the AUVs system are retainedand disturbances for the AUVs system are considered Byusing a successive approximation approach an ODRC law isproposed based on the quadratic optimal control theory
8 Mathematical Problems in Engineering
10 20 30 40 50 60 70 80 90 1000Time (s)
k = 1k = 2
k = 4
minus2
minus15
minus1
minus05
0
05
1
15
2
x2(t
)
Figure 5 The simulation curves of 1199092(119905)
10 20 30 40 50 60 70 80 90 1000Time (s)
minus2
minus15
minus1
minus05
0
05
1
15
2
k = 1k = 2
k = 4
x3(t
)
Figure 6 The simulation curves of 1199093(119905)
0 10 20 30 40 50 60 70 80 90 100Time (s)
k = 1k = 2
k = 4
minus3
minus2
minus1
0
1
2
3
4
x4(t
)
Figure 7 The simulation curves of 1199094(119905)
k = 1k = 2
k = 4
10 20 30 40 50 60 70 80 90 1000Time (s)
minus15
minus1
minus05
0
05
1
15
2
u(t
)
Figure 8 The simulation curves of 119906(119905)
which consists of the optimal feedback item the feedforwarddisturbances rejection item and the nonlinear compensatoryitem Finally the effectiveness of the proposed approach hasbeen illustrated by an AUV model
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This study was supported in part by the National Natu-ral Science Foundation of China (61673357 41276085 and61572448) and by the Natural Science Excellence Foundationof Shandong Province (ZR2015FM004 and ZR2014JL043)
References
[1] R B Wynn V A I Huvenne T P Le Bas et al ldquoAutonomousUnderwater Vehicles (AUVs) their past present and futurecontributions to the advancement of marine geosciencerdquoMarine Geology vol 352 pp 451ndash468 2014
[2] G Bartolini and A Pisano ldquoBlack-box position and attitudetracking for underwater vehicles by second-order sliding-mode techniquerdquo International Journal of Robust and NonlinearControl vol 20 no 14 pp 1594ndash1609 2010
[3] L Wang H-M Jia L-J Zhang and H-B Wang ldquoHorizontaltracking control for AUV based on nonlinear sliding moderdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo12) vol 1 pp 460ndash463 2012
[4] Z-P Yan D Wu J-J Zhou and X Zhang ldquoApplicationof extension integral variable structure control method onsimulation of AUV heading control systemrdquo in Proceedings ofthe 30th Chinese Control Conference vol 7 pp 2617ndash2621 July2011
[5] J Ghommam and M Saad ldquoBackstepping-based cooperativeand adaptive tracking control design for a group of underactu-ated AUVs in horizontal planrdquo International Journal of Controlvol 87 no 5 pp 1076ndash1093 2014
Mathematical Problems in Engineering 9
[6] L Lapierre and B Jouvencel ldquoRobust nonlinear path-followingcontrol of an AUVrdquo IEEE Journal of Oceanic Engineering vol 33no 2 pp 89ndash102 2008
[7] L Lapierre and D Soetanto ldquoNonlinear path-following controlof an AUVrdquoOcean Engineering vol 34 no 11-12 pp 1734ndash17442007
[8] J Petrich and D J Stilwell ldquoRobust control for an autonomousunderwater vehicle that suppresses pitch and yaw couplingrdquoOcean Engineering vol 38 no 1 pp 197ndash204 2011
[9] L Moreira and C G Soares ldquo1198672 and 119867infin designs for divingand course control of an Autonomous underwater vehicle inpresence of wavesrdquo Journal of Oceanic Engineering vol 33 no2 pp 69ndash88 2008
[10] B K Sahu and B Subudhi ldquoAdaptive tracking control ofan autonomous underwater vehiclerdquo International Journal ofAutomation and Computing vol 11 no 3 pp 299ndash307 2014
[11] B B Miao T S Li and W L Luo ldquoA DSC and MLP basedrobust adaptive NN tracking control for underwater vehiclerdquoNeurocomputing vol 111 pp 184ndash189 2013
[12] L-J Zhang X Qi and Y-J Pang ldquoAdaptive output feedbackcontrol based on DRFNN for AUVrdquoOcean Engineering vol 36no 9-10 pp 716ndash722 2009
[13] B Geranmehr and S R Nekoo ldquoNonlinear suboptimal controlof fully coupled non-affine six-DOF autonomous underwatervehicle using the state-dependent Riccati equationrdquo OceanEngineering vol 96 pp 248ndash257 2015
[14] D W Kim ldquoTracking of REMUS autonomous underwatervehicles with actuator saturationsrdquo Automatica vol 58 pp 15ndash21 2015
[15] F Repoulias and E Papadopoulos ldquoPlanar trajectory planningand tracking control design for underactuated AUVsrdquo OceanEngineering vol 34 no 11-12 pp 1650ndash1667 2007
[16] S-W Shi W-S Yan J Gao and W-B Li ldquoPath-followingcontrol of an AUV in the horizontal plane with constant oceancurrentsrdquo Acta Armamentarii vol 31 no 3 pp 375ndash379 2010
[17] X-Q Cheng J-Y Qu Z-P Yan and X-Q Bian ldquoHinfin robustfault-tolerant controller design for an autonomous underwatervehiclersquos navigation control systemrdquo Journal of Marine Scienceand Application vol 9 no 1 pp 87ndash92 2010
[18] S Liu DWang and E Poh ldquoNon-linear output feedback track-ing control for AUVs in shallow wave disturbance conditionrdquoInternational Journal of Control vol 81 no 11 pp 1806ndash18232008
[19] A P Aguiar and AM Pascoal ldquoDynamic positioning and way-point tracking of underactuated AUVs in the presence of oceancurrentsrdquo International Journal of Control vol 80 no 7 pp1092ndash1108 2007
[20] F-D Gao C-Y Pan Y-Y Han and X Zhang ldquoNonlineartrajectory tracking control of a new autonomous underwatervehicle in complex sea conditionsrdquo Journal of Central SouthUniversity vol 19 no 7 pp 1859ndash1868 2012
[21] L-J Zhang X Qi Y-J Pang and D-P Jiang ldquoAdaptiveoutput feedback control for trajectory tracking of AUV inwave disturbance conditionrdquo International Journal of WaveletsMultiresolution and Information Processing vol 11 no 3 pp 1ndash15 2013
[22] H Joe M Kim and S-C Yu ldquoSecond-order sliding-mode con-troller for autonomous underwater vehicle in the presence ofunknown disturbancesrdquo Nonlinear Dynamics vol 78 no 1 pp183ndash196 2014
[23] H-G Zhang Q-L Wei and Y-H Luo ldquoA novel infinite-timeoptimal tracking control scheme for a class of discrete-timenonlinear systems via the greedy HDP iteration algorithmrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 38 no 4 pp 937ndash942 2008
[24] Q-L Wei H-G Zhang D-R Liu and Y Zhao ldquoAn optimalcontrol scheme for a class of discrete-time nonlinear systemswith time delays using adaptive dynamic programmingrdquo ActaAutomatica Sinica vol 36 no 1 pp 121ndash129 2010
[25] Q-X Qu Y-H Luo and H-G Zhang ldquoRobust approximateoptimal tracking control of time-varying trajectory for nonlin-ear affine systemsrdquo Control Theory amp Applications vol 33 no 1pp 77ndash84 2016
[26] G-Y Tang ldquoSuboptimal control for nonlinear systems a suc-cessive approximation approachrdquo Systems and Control Lettersvol 54 no 5 pp 429ndash434 2005
[27] G-Y Tang and D-X Gao ldquoApproximation design of optimalcontrollers for nonlinear systems with sinusoidal disturbancesrdquoNonlinear Analysis Theory Methods amp Applications vol 66 no2 pp 403ndash414 2007
[28] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[29] T Prestero Verification of a Six-Degree of Freedom SimulationModel for the REMUS Autonomous Underwater Vehicles MIT2001
[30] O-E Fjellstad and T I Fossen ldquoPosition and attitude trackingof AUVrsquos a quaternion feedback approachrdquo IEEE Journal ofOceanic Engineering vol 19 no 4 pp 512ndash518 1994
[31] Q Yang H Su and G-Y Tang ldquoApproximate optimal trackingcontrol for near-surface AUVs with wave disturbancesrdquo Journalof Ocean University of China vol 15 no 5 pp 789ndash798 2016
[32] H Ma G-Y Tang and W Hu ldquoFeedforward and feedbackoptimal control with memory for offshore platforms underirregular wave forcesrdquo Journal of Sound and Vibration vol 328no 4-5 pp 369ndash381 2009
[33] B-L Zhang and Q-L Han ldquoNetwork-based modelling andactive control for offshore steel jacket platform with TMDmechanismsrdquo Journal of Sound and Vibration vol 333 pp6796ndash6814 2014
[34] S-Y Han D Wang Y-H Chen G-Y Tang and X-X YangldquoOptimal tracking control for discrete-time systems with mul-tiple input delays under sinusoidal disturbancesrdquo InternationalJournal of Control Automation and Systems vol 13 no 2 pp292ndash301 2015
[35] X-Q Cheng Research on the Robust Heading Control forAUV Based on Feedback Linearization in Near Surface HarbinEngineering University Harbin China 2008
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
119879 = [[[119898 minus 1
212058811987131198841015840V minus1212058811987141198841015840119903minus1212058811987141198731015840V 119868119911 minus 1212058811987151198731015840119903
]]]
1198601 = [[[
1212058811987121198841015840119906V1199060
12120588119871311988410158401199061199031199060 minus 11989811990601
212058811987131198731015840119906V119906012120588119871411987310158401199061199031199060
]]]
1198611 = [[[
121205881198712119884101584012057511990311990602121205881198713119873101584012057511990311990602
]]]
(7)
119860 119861 and 119863 are defined in (6) 1199090 is the initial state and119891(119909 119905) is a limitary nonlinear vector which includes errorsand uncertainties
Remark 1 The limitary nonlinear vector 119891(119909 119905) satisfies thefollowing Lipschitz conditions
1003817100381710038171003817119891 (119909 119905)1003817100381710038171003817 le 120572 119909 1003817100381710038171003817119891 (119909 119905) minus 119891 (119909 119905)1003817100381710038171003817 le 120573 119909 minus 119909
forall119909 119909 isin Ω sub 1198774(8)
where 120572 and 120573 are positive constants
22 Disturbances Model of Wave Force The external distur-bances for AUVs are complex In the near water surfacethe wave force disturbances are the most important factor tothe AUVs system But ocean waves are always irregularIn present study the irregular long storm waves are oftensimplified [31ndash33] as follows
120577119886 (119905) =infinsum119894=1
120577119886119894 cos (119896119894120585 cos 120583 + 119896119894120578 sin 120583 minus 120596119894119905 + 120576119894) (9)
where 119896119894 is the 119894th component wave number 120596119894 is the 119894thcomponent wave frequency 120576119894 is a random phase angleuniformly distributed within 0 sim 2120587 120577119886119894 is the 119894th componentwave amplitude 120577119886119894 = radic2119878(120596119894)Δ120596 119878(120596119894) is the 119894th componentocean power spectrum density (PSD) function and Δ120596 is thefrequency discretization intervals of wave spectrum
The wave force disturbances have been representedaccording to the Pierson-Moskowitz (PM) spectrum writtenas
119878 (120596) = 1198601205965 exp(minus119861
1205964 ) (10)
where 119860 = 000811198922 119861 = 312(11986713)2 where 119892 is theacceleration due to gravity and 11986713 is the significant waveheight in meters
Considering the stationary waves on the sea surface let120585 = 0 and 120578 = 0 and choose multiple regular wavesuperposition to get randomwaves so the point long-crestedwaves are written as
120577119886 (119905) =119873sum119894=1
radic2119878 (120596119894) Δ120596 cos (120596119890119894119905 + 120576119894)
= 119873sum119894=1
119879119894 (120596119894) cos 120579119894(11)
where 119873 is the number of superimposed waves 120596119890119894 = 120596119894 minus(12059611989421199060119892) cos120573 is encounter angle frequency and 120573 is theencounter wave angle
We construct a system model to describe the irregularwave forces for the AUV in two-dimensional horizontalplane
Define V119894 = 119879119894(120596119894) cos(120579119894) as the horizontal velocity ofwater particle orbital motion
Let V(119905) = [V1(119905) sdot sdot sdot V119873(119905)]119879 taking the derivative ofV(119905) we have
V119894 = minus1205962119894 V119894 = minusΩV (12)
whereΩ = diag12059621 12059622 1205962119873Define 119908(119905) = [V(119905)119879 V(119905)119879]119879 then
(119905) = [ 0 119868minusΩ 0]119908 (119905) ≜ 119865119908 (119905)
V (119905) = [119868 0]119908 (119905) (13)
where 119868 is119873 dimensional unit matrix and 0 is119873 dimensionalzero matrix
Mathematical Problems in Engineering 5
According to the linear wave theory the wave forcedisturbances for the AUV system are as follows
119889 (119905) = 119873sum119894=1
119879119894 (120596119894) V119894 (119905)= [1198791 (1205961) sdot sdot sdot 119879119873 (120596119873)] [V1 (119905) sdot sdot sdot V119873 (119905)]119879= [1198791 (1205961) sdot sdot sdot 119879119873 (120596119873)] [119868 0]119908 (119905) ≜ 119867119908 (119905)
(14)
So the total wave force disturbances for AUVs can be de-scribed by the following system
(119905) = 119865119908 (119905) 119889 (119905) = 119867119908 (119905) (15)
where 119865 and 119867 are real constant matrices of appropriatedimensions
3 Controller Design
According to the dynamic model of the AUVs headingcontrol system (6) we select the following average quadraticperformance index
119869 = lim119879rarrinfin
1119879 int1198791199050
[119909119879 (119905) 119876119909 (119905) + 119906119879 (119905) 119877119906 (119905)] 119889119905 (16)
where119876 is theweightingmatrix for states symmetric positivesemidefinite and 119877 is the weighting matrix for the controlinputs symmetric positive definite 119876 and 119877 are properlyselected to shape the response characteristics in the closed-loop AUVs heading control system (6)
The optimal control problem is to search for a control law119906lowast(119905) for system (6) which makes the value of the averagequadratic performance index (16) minimum
Applying the maximum principle of the optimal controlproblem in (6) and (16) the optimal control law can bewritten as
119906lowast (119905) = minus119877minus1119861119879120582 (119905) (17)
where 120582(119905) is the solution to the following TPBV problem
minus (119905) = 119876119909 (119905) + 119860119879120582 (119905) + 119891119879119909 (119909 119905) 120582 (119905) (119905) = 119860119909 (119905) minus 119878120582 (119905) + 119891 (119909 119905) + 119863119889 (119905)
119909 (1199050) = 1199090120582 (infin) = 0
119905 gt 1199050
(18)
which is the optimality necessary condition where 119878 =119861119877minus1119861119879 and 119891119879119909 (119909 119905) = 120597119891119879(119909 119905)120597119909For the AUVs heading control system (6) and wave force
system (15) with the average quadratic performance index(16) we now state the following theorem
Theorem 2 Consider the optimal control problem describedby systems (6) and (15) with the average quadratic performanceindex (16) Then the ODRC law 119906lowast(119905) is existent and uniqueand its form is as follows
119906lowast (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + lim119896rarrinfin
119892(119896) (119905)] (19)
where 119875 is the unique positive-definite solution of the followingRiccati matrix equation
119860119879119875 + 119875119860 minus 119875119878119875 + 119876 = 0 (20)
119875 is the unique solution of the following Sylvester matrixequation
(119860 minus 119878119875)119879 119875 + 119875119865 = minus119875119863119867 (21)
Proof Let
120582 (119905) = 119875119909 (119905) + 1198751119889 (119905) + 119892 (119905) (22)
where 119909(119905) 119889(119905) and 119892(119905) are the state vector the wave forcedisturbances and the adjoint vector respectively
It is well known that119875 is the unique positive-definite solu-tion of Riccati matrix equation (20) Substituting 119875 into (21)then 119875 can be solved uniquely here 119875 = 1198751119867 When 119875 and119875 are got uniquely therefore we can obtain the ODRC lawuniquely as follows
119906lowast (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892 (119905)] (23)
where 119892(119905) and 119909(119905) are the solutions of the followingequations
119892 (119905) = (119875119878 minus 119860119879) 119892 (119905) minus 119875119891 (119909 119905)minus 119891119879119909 (119909 119905) [119875119909 (119905) + 119875119908 (119905) + 119892 (119905)]
(119905) = (119860 minus 119878119875) 119909 (119905) + (119863119867 minus 119878119875)119908 (119905) minus 119878119892 (119905)+ 119891 (119909 119905)
119892 (infin) = 0119909 (1199050) = 1199090
(24)
and 119908(119905) is the solution of the wave forces system (15)By using the successive approximation approach [26 27
31 34] we construct the adjoint vector sequence
119892(0) (119905) equiv 0119892(119896) (119905)= (119875119878 minus 119860119879) 119892(119896) (119905) minus 119875119891 (119909(119896minus1) 119905)
minus 119891119879119909 (119909(119896minus1) 119905) [119875119909(119896minus1) (119905) + 119875119908 (119905) + 119892(119896minus1) (119905)] lim119879rarrinfin
119892(119896) (119879) = 0119896 = 1 2
(25)
6 Mathematical Problems in Engineering
and the state equation sequence
119909(0) (119905) equiv 0(119896) (119905) = (119860 minus 119878119875) 119909(119896) (119905) + (119863119867 minus 119878119875)119908 (119905)
minus 119878119892(119896) (119905) + 119891 (119909(119896minus1) 119905) 119909(119896) (1199050) = 1199090
119896 = 1 2
(26)
It can be proved that the adjoint vector solution sequence119892(119896)(119905) in (25) uniformly converges to 119892(119905) and the statevector solution sequence 119909(119896)(119905) in (26) uniformly convergesto 119909(119905) [26 27 31 34]
When 119896 rarr infin the limits of 119909(119896)(119905) and 119892(119896)(119905) becomethe optimal state vector 119909lowast(119905) and the optimal adjoint vector119892(119905)
Define 119892(infin)(119905) = lim119896rarrinfin119892(119896)(119905) then the ODRC law isrewritten as (19) This completes the proof
Remark 3 It is usually impossible to obtain the exact adjointvector 119892(infin)(119905) when designing the ODRC law in practice Inmany cases it may be better to choose an 119892(119873)(119905) as theapproximation of 119892(infin)(119905) where 119873 depends on a concreteerror coefficient 120576 gt 0The119873th-orderODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] (27)
Remark 4 The 119873th-order ODRC law consists of a feedbackterm 119875119909(119905) a feedforward disturbances rejection term 119875119908(119905)and a nonlinear compensatory term 119892(119873)(119905)Remark 5 Thewave disturbances are difficult to bemeasuredand obtained and 119908(119905) is the state vectors of system (15)the ODRC law is physically unrealizable in practice Sowe construct a Luenberger disturbances observer to make itrealizable as follows
119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (28)
where 119908(119905) is the observation value of 119908(119905) and 119871 is theobserver matrix of appropriate dimensions We can choosethe appropriate dimensions matrix 119871 and the eigenvalues ofthe matrix (119865 minus 119871119867) have negative real parts Then the 119873th-order ODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] 119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (29)
4 Example and Simulation
41 Simulation Model and Parameters for AUVs and WaveForce Disturbances In this section a simulation study is car-ried out using a typical AUV model [35] to demonstrate theperformance of the proposed approach The hydrodynamiccoefficients of an AUV are shown in Table 2
Table 2 Hydrodynamic coefficients of the AUV
Name Symbol Numerical UnitQuality 119898 67831 kgLength 119871 5720 mSea-water density 120588 1025 kgm3
Dimensionlesscoefficient of swayforce
1198841015840 V minus39854
10minus3
1198841015840 119903 125671198841015840V|V| minus257041198841015840119903|119903| 99811198841015840119906V minus418581198841015840119906119903 104351198841015840120575119903 18509
Dimensionlesscoefficient of yawmoment
1198731015840 V minus38721198731015840 119903 minus21051198731015840V|V| 174801198731015840119903|119903| minus64631198731015840119906V minus28781198731015840119906119903 minus94361198731015840120575119903 minus9754
Assuming that the axial velocity is 1199060 = 2ms thesignificant wave height is 11986713 = 4m and encounter anglefrequency of wave is 06320 rads and 10470 rads then thePSD of the wave height is shown in Figure 2
And the wave force can be calculated from (11) which isshown in Figure 3
The matrices and vector of the AUVs heading controlsystem (6) are as follows
119860 =[[[[[[
minus01966 minus11472 0 0minus00780 minus06558 0 0
0 minus1 0 00 0 1 0
]]]]]]
119861 =[[[[[[
0196202165
00
]]]]]]
119863 =[[[[[[
0000200273
00
]]]]]]
119891 (119909 119905) =[[[[[[
minus1697711990912 + 2439611990922 minus 26767119909111990920045811990912 minus 0554111990922 minus 0036511990911199092
00
]]]]]]
(30)
Mathematical Problems in Engineering 7
Table 3 119869119873 and Δ119869 at different iteration times
119896 1 2 3 4 5119869119873 152455 113397 101086 97592 97452Δ119869 03444 01218 00358 00014
05 1 15 2 25 30Frequency (rads)
0
1
2
3
4
5
6
7
8
PSD
of w
ave h
eigh
t (G
2s
)
w = 06320 radsw = 10470 rads
Figure 2 PSD of wave height
The parameters for the average quadratic performanceindex (16) are chosen as
119876 =[[[[[[
1 0 0 00 1 0 00 0 1 00 0 0 1
]]]]]]
119877 = 5
(31)
By solving (20) and (21) we obtain
119875 =[[[[[[
65444 minus139363 31885 02422minus139363 796598 minus568132 minus10547831885 minus568132 569366 13129302422 minus105478 131293 52210
]]]]]]
119875 =[[[[[[
minus12713 minus06152 minus112055 minus54904195865 91021 574458 307596minus196954 minus95852 minus349479 minus209735minus45788 minus24965 minus42104 minus34488
]]]]]]
(32)
42 Simulation Results and Analysis Based on the AUVmodel and parameters the state vector is considered as119909 = [V 119903 120595119890 120595119868]119879 the simulation curves 119909(119905) and 119906(119905) atdifferent iteration times are shown in Figures 4ndash8
The average quadratic performance index values 119869119873 anderrors Δ119869 = |(119869119873minus1 minus 119869119873)119869119873| lt 120576 at different iteration timesare listed in Table 3 and 120576 is the control precision
10 20 30 40 50 60 70 80 90 1000Time (s)
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Am
plitu
de (m
)
Figure 3 Numerical simulation of the random wave force
10 20 30 40 50 60 70 80 90 1000Time (s)
minus3
minus2
minus1
0
1
2
3
k = 1k = 2
k = 4
x1(t
)
Figure 4 The simulation curves of 1199091(119905)
From Table 3 it can be seen clearly that the averagequadratic performance index values decrease as iterationtimes increase and tend to a deterministic optimal value 119869lowastultimately If we choose the control precision 120576 = 005 thenthe relative error of the average quadratic performance indexvalues satisfies |(1198693 minus 1198694)1198694| lt 120576 It indicates that the 4thODRC law 1199064(119905) is very close to the optimal control law119906lowast(119905) It is obvious that the proposed approach requires a fewiterations to get the approximate ODRC law And it is morerobust about current and wave disturbances Simulationresults show that the proposed approach applied to the AUVsis effective
5 Conclusion
In this paper the disturbances rejection control problemfor the AUVs heading control system has been consid-ered and an ODRC approach has been designed For thedesign nonlinearities in the AUVs system are retainedand disturbances for the AUVs system are considered Byusing a successive approximation approach an ODRC law isproposed based on the quadratic optimal control theory
8 Mathematical Problems in Engineering
10 20 30 40 50 60 70 80 90 1000Time (s)
k = 1k = 2
k = 4
minus2
minus15
minus1
minus05
0
05
1
15
2
x2(t
)
Figure 5 The simulation curves of 1199092(119905)
10 20 30 40 50 60 70 80 90 1000Time (s)
minus2
minus15
minus1
minus05
0
05
1
15
2
k = 1k = 2
k = 4
x3(t
)
Figure 6 The simulation curves of 1199093(119905)
0 10 20 30 40 50 60 70 80 90 100Time (s)
k = 1k = 2
k = 4
minus3
minus2
minus1
0
1
2
3
4
x4(t
)
Figure 7 The simulation curves of 1199094(119905)
k = 1k = 2
k = 4
10 20 30 40 50 60 70 80 90 1000Time (s)
minus15
minus1
minus05
0
05
1
15
2
u(t
)
Figure 8 The simulation curves of 119906(119905)
which consists of the optimal feedback item the feedforwarddisturbances rejection item and the nonlinear compensatoryitem Finally the effectiveness of the proposed approach hasbeen illustrated by an AUV model
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This study was supported in part by the National Natu-ral Science Foundation of China (61673357 41276085 and61572448) and by the Natural Science Excellence Foundationof Shandong Province (ZR2015FM004 and ZR2014JL043)
References
[1] R B Wynn V A I Huvenne T P Le Bas et al ldquoAutonomousUnderwater Vehicles (AUVs) their past present and futurecontributions to the advancement of marine geosciencerdquoMarine Geology vol 352 pp 451ndash468 2014
[2] G Bartolini and A Pisano ldquoBlack-box position and attitudetracking for underwater vehicles by second-order sliding-mode techniquerdquo International Journal of Robust and NonlinearControl vol 20 no 14 pp 1594ndash1609 2010
[3] L Wang H-M Jia L-J Zhang and H-B Wang ldquoHorizontaltracking control for AUV based on nonlinear sliding moderdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo12) vol 1 pp 460ndash463 2012
[4] Z-P Yan D Wu J-J Zhou and X Zhang ldquoApplicationof extension integral variable structure control method onsimulation of AUV heading control systemrdquo in Proceedings ofthe 30th Chinese Control Conference vol 7 pp 2617ndash2621 July2011
[5] J Ghommam and M Saad ldquoBackstepping-based cooperativeand adaptive tracking control design for a group of underactu-ated AUVs in horizontal planrdquo International Journal of Controlvol 87 no 5 pp 1076ndash1093 2014
Mathematical Problems in Engineering 9
[6] L Lapierre and B Jouvencel ldquoRobust nonlinear path-followingcontrol of an AUVrdquo IEEE Journal of Oceanic Engineering vol 33no 2 pp 89ndash102 2008
[7] L Lapierre and D Soetanto ldquoNonlinear path-following controlof an AUVrdquoOcean Engineering vol 34 no 11-12 pp 1734ndash17442007
[8] J Petrich and D J Stilwell ldquoRobust control for an autonomousunderwater vehicle that suppresses pitch and yaw couplingrdquoOcean Engineering vol 38 no 1 pp 197ndash204 2011
[9] L Moreira and C G Soares ldquo1198672 and 119867infin designs for divingand course control of an Autonomous underwater vehicle inpresence of wavesrdquo Journal of Oceanic Engineering vol 33 no2 pp 69ndash88 2008
[10] B K Sahu and B Subudhi ldquoAdaptive tracking control ofan autonomous underwater vehiclerdquo International Journal ofAutomation and Computing vol 11 no 3 pp 299ndash307 2014
[11] B B Miao T S Li and W L Luo ldquoA DSC and MLP basedrobust adaptive NN tracking control for underwater vehiclerdquoNeurocomputing vol 111 pp 184ndash189 2013
[12] L-J Zhang X Qi and Y-J Pang ldquoAdaptive output feedbackcontrol based on DRFNN for AUVrdquoOcean Engineering vol 36no 9-10 pp 716ndash722 2009
[13] B Geranmehr and S R Nekoo ldquoNonlinear suboptimal controlof fully coupled non-affine six-DOF autonomous underwatervehicle using the state-dependent Riccati equationrdquo OceanEngineering vol 96 pp 248ndash257 2015
[14] D W Kim ldquoTracking of REMUS autonomous underwatervehicles with actuator saturationsrdquo Automatica vol 58 pp 15ndash21 2015
[15] F Repoulias and E Papadopoulos ldquoPlanar trajectory planningand tracking control design for underactuated AUVsrdquo OceanEngineering vol 34 no 11-12 pp 1650ndash1667 2007
[16] S-W Shi W-S Yan J Gao and W-B Li ldquoPath-followingcontrol of an AUV in the horizontal plane with constant oceancurrentsrdquo Acta Armamentarii vol 31 no 3 pp 375ndash379 2010
[17] X-Q Cheng J-Y Qu Z-P Yan and X-Q Bian ldquoHinfin robustfault-tolerant controller design for an autonomous underwatervehiclersquos navigation control systemrdquo Journal of Marine Scienceand Application vol 9 no 1 pp 87ndash92 2010
[18] S Liu DWang and E Poh ldquoNon-linear output feedback track-ing control for AUVs in shallow wave disturbance conditionrdquoInternational Journal of Control vol 81 no 11 pp 1806ndash18232008
[19] A P Aguiar and AM Pascoal ldquoDynamic positioning and way-point tracking of underactuated AUVs in the presence of oceancurrentsrdquo International Journal of Control vol 80 no 7 pp1092ndash1108 2007
[20] F-D Gao C-Y Pan Y-Y Han and X Zhang ldquoNonlineartrajectory tracking control of a new autonomous underwatervehicle in complex sea conditionsrdquo Journal of Central SouthUniversity vol 19 no 7 pp 1859ndash1868 2012
[21] L-J Zhang X Qi Y-J Pang and D-P Jiang ldquoAdaptiveoutput feedback control for trajectory tracking of AUV inwave disturbance conditionrdquo International Journal of WaveletsMultiresolution and Information Processing vol 11 no 3 pp 1ndash15 2013
[22] H Joe M Kim and S-C Yu ldquoSecond-order sliding-mode con-troller for autonomous underwater vehicle in the presence ofunknown disturbancesrdquo Nonlinear Dynamics vol 78 no 1 pp183ndash196 2014
[23] H-G Zhang Q-L Wei and Y-H Luo ldquoA novel infinite-timeoptimal tracking control scheme for a class of discrete-timenonlinear systems via the greedy HDP iteration algorithmrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 38 no 4 pp 937ndash942 2008
[24] Q-L Wei H-G Zhang D-R Liu and Y Zhao ldquoAn optimalcontrol scheme for a class of discrete-time nonlinear systemswith time delays using adaptive dynamic programmingrdquo ActaAutomatica Sinica vol 36 no 1 pp 121ndash129 2010
[25] Q-X Qu Y-H Luo and H-G Zhang ldquoRobust approximateoptimal tracking control of time-varying trajectory for nonlin-ear affine systemsrdquo Control Theory amp Applications vol 33 no 1pp 77ndash84 2016
[26] G-Y Tang ldquoSuboptimal control for nonlinear systems a suc-cessive approximation approachrdquo Systems and Control Lettersvol 54 no 5 pp 429ndash434 2005
[27] G-Y Tang and D-X Gao ldquoApproximation design of optimalcontrollers for nonlinear systems with sinusoidal disturbancesrdquoNonlinear Analysis Theory Methods amp Applications vol 66 no2 pp 403ndash414 2007
[28] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[29] T Prestero Verification of a Six-Degree of Freedom SimulationModel for the REMUS Autonomous Underwater Vehicles MIT2001
[30] O-E Fjellstad and T I Fossen ldquoPosition and attitude trackingof AUVrsquos a quaternion feedback approachrdquo IEEE Journal ofOceanic Engineering vol 19 no 4 pp 512ndash518 1994
[31] Q Yang H Su and G-Y Tang ldquoApproximate optimal trackingcontrol for near-surface AUVs with wave disturbancesrdquo Journalof Ocean University of China vol 15 no 5 pp 789ndash798 2016
[32] H Ma G-Y Tang and W Hu ldquoFeedforward and feedbackoptimal control with memory for offshore platforms underirregular wave forcesrdquo Journal of Sound and Vibration vol 328no 4-5 pp 369ndash381 2009
[33] B-L Zhang and Q-L Han ldquoNetwork-based modelling andactive control for offshore steel jacket platform with TMDmechanismsrdquo Journal of Sound and Vibration vol 333 pp6796ndash6814 2014
[34] S-Y Han D Wang Y-H Chen G-Y Tang and X-X YangldquoOptimal tracking control for discrete-time systems with mul-tiple input delays under sinusoidal disturbancesrdquo InternationalJournal of Control Automation and Systems vol 13 no 2 pp292ndash301 2015
[35] X-Q Cheng Research on the Robust Heading Control forAUV Based on Feedback Linearization in Near Surface HarbinEngineering University Harbin China 2008
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
According to the linear wave theory the wave forcedisturbances for the AUV system are as follows
119889 (119905) = 119873sum119894=1
119879119894 (120596119894) V119894 (119905)= [1198791 (1205961) sdot sdot sdot 119879119873 (120596119873)] [V1 (119905) sdot sdot sdot V119873 (119905)]119879= [1198791 (1205961) sdot sdot sdot 119879119873 (120596119873)] [119868 0]119908 (119905) ≜ 119867119908 (119905)
(14)
So the total wave force disturbances for AUVs can be de-scribed by the following system
(119905) = 119865119908 (119905) 119889 (119905) = 119867119908 (119905) (15)
where 119865 and 119867 are real constant matrices of appropriatedimensions
3 Controller Design
According to the dynamic model of the AUVs headingcontrol system (6) we select the following average quadraticperformance index
119869 = lim119879rarrinfin
1119879 int1198791199050
[119909119879 (119905) 119876119909 (119905) + 119906119879 (119905) 119877119906 (119905)] 119889119905 (16)
where119876 is theweightingmatrix for states symmetric positivesemidefinite and 119877 is the weighting matrix for the controlinputs symmetric positive definite 119876 and 119877 are properlyselected to shape the response characteristics in the closed-loop AUVs heading control system (6)
The optimal control problem is to search for a control law119906lowast(119905) for system (6) which makes the value of the averagequadratic performance index (16) minimum
Applying the maximum principle of the optimal controlproblem in (6) and (16) the optimal control law can bewritten as
119906lowast (119905) = minus119877minus1119861119879120582 (119905) (17)
where 120582(119905) is the solution to the following TPBV problem
minus (119905) = 119876119909 (119905) + 119860119879120582 (119905) + 119891119879119909 (119909 119905) 120582 (119905) (119905) = 119860119909 (119905) minus 119878120582 (119905) + 119891 (119909 119905) + 119863119889 (119905)
119909 (1199050) = 1199090120582 (infin) = 0
119905 gt 1199050
(18)
which is the optimality necessary condition where 119878 =119861119877minus1119861119879 and 119891119879119909 (119909 119905) = 120597119891119879(119909 119905)120597119909For the AUVs heading control system (6) and wave force
system (15) with the average quadratic performance index(16) we now state the following theorem
Theorem 2 Consider the optimal control problem describedby systems (6) and (15) with the average quadratic performanceindex (16) Then the ODRC law 119906lowast(119905) is existent and uniqueand its form is as follows
119906lowast (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + lim119896rarrinfin
119892(119896) (119905)] (19)
where 119875 is the unique positive-definite solution of the followingRiccati matrix equation
119860119879119875 + 119875119860 minus 119875119878119875 + 119876 = 0 (20)
119875 is the unique solution of the following Sylvester matrixequation
(119860 minus 119878119875)119879 119875 + 119875119865 = minus119875119863119867 (21)
Proof Let
120582 (119905) = 119875119909 (119905) + 1198751119889 (119905) + 119892 (119905) (22)
where 119909(119905) 119889(119905) and 119892(119905) are the state vector the wave forcedisturbances and the adjoint vector respectively
It is well known that119875 is the unique positive-definite solu-tion of Riccati matrix equation (20) Substituting 119875 into (21)then 119875 can be solved uniquely here 119875 = 1198751119867 When 119875 and119875 are got uniquely therefore we can obtain the ODRC lawuniquely as follows
119906lowast (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892 (119905)] (23)
where 119892(119905) and 119909(119905) are the solutions of the followingequations
119892 (119905) = (119875119878 minus 119860119879) 119892 (119905) minus 119875119891 (119909 119905)minus 119891119879119909 (119909 119905) [119875119909 (119905) + 119875119908 (119905) + 119892 (119905)]
(119905) = (119860 minus 119878119875) 119909 (119905) + (119863119867 minus 119878119875)119908 (119905) minus 119878119892 (119905)+ 119891 (119909 119905)
119892 (infin) = 0119909 (1199050) = 1199090
(24)
and 119908(119905) is the solution of the wave forces system (15)By using the successive approximation approach [26 27
31 34] we construct the adjoint vector sequence
119892(0) (119905) equiv 0119892(119896) (119905)= (119875119878 minus 119860119879) 119892(119896) (119905) minus 119875119891 (119909(119896minus1) 119905)
minus 119891119879119909 (119909(119896minus1) 119905) [119875119909(119896minus1) (119905) + 119875119908 (119905) + 119892(119896minus1) (119905)] lim119879rarrinfin
119892(119896) (119879) = 0119896 = 1 2
(25)
6 Mathematical Problems in Engineering
and the state equation sequence
119909(0) (119905) equiv 0(119896) (119905) = (119860 minus 119878119875) 119909(119896) (119905) + (119863119867 minus 119878119875)119908 (119905)
minus 119878119892(119896) (119905) + 119891 (119909(119896minus1) 119905) 119909(119896) (1199050) = 1199090
119896 = 1 2
(26)
It can be proved that the adjoint vector solution sequence119892(119896)(119905) in (25) uniformly converges to 119892(119905) and the statevector solution sequence 119909(119896)(119905) in (26) uniformly convergesto 119909(119905) [26 27 31 34]
When 119896 rarr infin the limits of 119909(119896)(119905) and 119892(119896)(119905) becomethe optimal state vector 119909lowast(119905) and the optimal adjoint vector119892(119905)
Define 119892(infin)(119905) = lim119896rarrinfin119892(119896)(119905) then the ODRC law isrewritten as (19) This completes the proof
Remark 3 It is usually impossible to obtain the exact adjointvector 119892(infin)(119905) when designing the ODRC law in practice Inmany cases it may be better to choose an 119892(119873)(119905) as theapproximation of 119892(infin)(119905) where 119873 depends on a concreteerror coefficient 120576 gt 0The119873th-orderODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] (27)
Remark 4 The 119873th-order ODRC law consists of a feedbackterm 119875119909(119905) a feedforward disturbances rejection term 119875119908(119905)and a nonlinear compensatory term 119892(119873)(119905)Remark 5 Thewave disturbances are difficult to bemeasuredand obtained and 119908(119905) is the state vectors of system (15)the ODRC law is physically unrealizable in practice Sowe construct a Luenberger disturbances observer to make itrealizable as follows
119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (28)
where 119908(119905) is the observation value of 119908(119905) and 119871 is theobserver matrix of appropriate dimensions We can choosethe appropriate dimensions matrix 119871 and the eigenvalues ofthe matrix (119865 minus 119871119867) have negative real parts Then the 119873th-order ODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] 119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (29)
4 Example and Simulation
41 Simulation Model and Parameters for AUVs and WaveForce Disturbances In this section a simulation study is car-ried out using a typical AUV model [35] to demonstrate theperformance of the proposed approach The hydrodynamiccoefficients of an AUV are shown in Table 2
Table 2 Hydrodynamic coefficients of the AUV
Name Symbol Numerical UnitQuality 119898 67831 kgLength 119871 5720 mSea-water density 120588 1025 kgm3
Dimensionlesscoefficient of swayforce
1198841015840 V minus39854
10minus3
1198841015840 119903 125671198841015840V|V| minus257041198841015840119903|119903| 99811198841015840119906V minus418581198841015840119906119903 104351198841015840120575119903 18509
Dimensionlesscoefficient of yawmoment
1198731015840 V minus38721198731015840 119903 minus21051198731015840V|V| 174801198731015840119903|119903| minus64631198731015840119906V minus28781198731015840119906119903 minus94361198731015840120575119903 minus9754
Assuming that the axial velocity is 1199060 = 2ms thesignificant wave height is 11986713 = 4m and encounter anglefrequency of wave is 06320 rads and 10470 rads then thePSD of the wave height is shown in Figure 2
And the wave force can be calculated from (11) which isshown in Figure 3
The matrices and vector of the AUVs heading controlsystem (6) are as follows
119860 =[[[[[[
minus01966 minus11472 0 0minus00780 minus06558 0 0
0 minus1 0 00 0 1 0
]]]]]]
119861 =[[[[[[
0196202165
00
]]]]]]
119863 =[[[[[[
0000200273
00
]]]]]]
119891 (119909 119905) =[[[[[[
minus1697711990912 + 2439611990922 minus 26767119909111990920045811990912 minus 0554111990922 minus 0036511990911199092
00
]]]]]]
(30)
Mathematical Problems in Engineering 7
Table 3 119869119873 and Δ119869 at different iteration times
119896 1 2 3 4 5119869119873 152455 113397 101086 97592 97452Δ119869 03444 01218 00358 00014
05 1 15 2 25 30Frequency (rads)
0
1
2
3
4
5
6
7
8
PSD
of w
ave h
eigh
t (G
2s
)
w = 06320 radsw = 10470 rads
Figure 2 PSD of wave height
The parameters for the average quadratic performanceindex (16) are chosen as
119876 =[[[[[[
1 0 0 00 1 0 00 0 1 00 0 0 1
]]]]]]
119877 = 5
(31)
By solving (20) and (21) we obtain
119875 =[[[[[[
65444 minus139363 31885 02422minus139363 796598 minus568132 minus10547831885 minus568132 569366 13129302422 minus105478 131293 52210
]]]]]]
119875 =[[[[[[
minus12713 minus06152 minus112055 minus54904195865 91021 574458 307596minus196954 minus95852 minus349479 minus209735minus45788 minus24965 minus42104 minus34488
]]]]]]
(32)
42 Simulation Results and Analysis Based on the AUVmodel and parameters the state vector is considered as119909 = [V 119903 120595119890 120595119868]119879 the simulation curves 119909(119905) and 119906(119905) atdifferent iteration times are shown in Figures 4ndash8
The average quadratic performance index values 119869119873 anderrors Δ119869 = |(119869119873minus1 minus 119869119873)119869119873| lt 120576 at different iteration timesare listed in Table 3 and 120576 is the control precision
10 20 30 40 50 60 70 80 90 1000Time (s)
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Am
plitu
de (m
)
Figure 3 Numerical simulation of the random wave force
10 20 30 40 50 60 70 80 90 1000Time (s)
minus3
minus2
minus1
0
1
2
3
k = 1k = 2
k = 4
x1(t
)
Figure 4 The simulation curves of 1199091(119905)
From Table 3 it can be seen clearly that the averagequadratic performance index values decrease as iterationtimes increase and tend to a deterministic optimal value 119869lowastultimately If we choose the control precision 120576 = 005 thenthe relative error of the average quadratic performance indexvalues satisfies |(1198693 minus 1198694)1198694| lt 120576 It indicates that the 4thODRC law 1199064(119905) is very close to the optimal control law119906lowast(119905) It is obvious that the proposed approach requires a fewiterations to get the approximate ODRC law And it is morerobust about current and wave disturbances Simulationresults show that the proposed approach applied to the AUVsis effective
5 Conclusion
In this paper the disturbances rejection control problemfor the AUVs heading control system has been consid-ered and an ODRC approach has been designed For thedesign nonlinearities in the AUVs system are retainedand disturbances for the AUVs system are considered Byusing a successive approximation approach an ODRC law isproposed based on the quadratic optimal control theory
8 Mathematical Problems in Engineering
10 20 30 40 50 60 70 80 90 1000Time (s)
k = 1k = 2
k = 4
minus2
minus15
minus1
minus05
0
05
1
15
2
x2(t
)
Figure 5 The simulation curves of 1199092(119905)
10 20 30 40 50 60 70 80 90 1000Time (s)
minus2
minus15
minus1
minus05
0
05
1
15
2
k = 1k = 2
k = 4
x3(t
)
Figure 6 The simulation curves of 1199093(119905)
0 10 20 30 40 50 60 70 80 90 100Time (s)
k = 1k = 2
k = 4
minus3
minus2
minus1
0
1
2
3
4
x4(t
)
Figure 7 The simulation curves of 1199094(119905)
k = 1k = 2
k = 4
10 20 30 40 50 60 70 80 90 1000Time (s)
minus15
minus1
minus05
0
05
1
15
2
u(t
)
Figure 8 The simulation curves of 119906(119905)
which consists of the optimal feedback item the feedforwarddisturbances rejection item and the nonlinear compensatoryitem Finally the effectiveness of the proposed approach hasbeen illustrated by an AUV model
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This study was supported in part by the National Natu-ral Science Foundation of China (61673357 41276085 and61572448) and by the Natural Science Excellence Foundationof Shandong Province (ZR2015FM004 and ZR2014JL043)
References
[1] R B Wynn V A I Huvenne T P Le Bas et al ldquoAutonomousUnderwater Vehicles (AUVs) their past present and futurecontributions to the advancement of marine geosciencerdquoMarine Geology vol 352 pp 451ndash468 2014
[2] G Bartolini and A Pisano ldquoBlack-box position and attitudetracking for underwater vehicles by second-order sliding-mode techniquerdquo International Journal of Robust and NonlinearControl vol 20 no 14 pp 1594ndash1609 2010
[3] L Wang H-M Jia L-J Zhang and H-B Wang ldquoHorizontaltracking control for AUV based on nonlinear sliding moderdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo12) vol 1 pp 460ndash463 2012
[4] Z-P Yan D Wu J-J Zhou and X Zhang ldquoApplicationof extension integral variable structure control method onsimulation of AUV heading control systemrdquo in Proceedings ofthe 30th Chinese Control Conference vol 7 pp 2617ndash2621 July2011
[5] J Ghommam and M Saad ldquoBackstepping-based cooperativeand adaptive tracking control design for a group of underactu-ated AUVs in horizontal planrdquo International Journal of Controlvol 87 no 5 pp 1076ndash1093 2014
Mathematical Problems in Engineering 9
[6] L Lapierre and B Jouvencel ldquoRobust nonlinear path-followingcontrol of an AUVrdquo IEEE Journal of Oceanic Engineering vol 33no 2 pp 89ndash102 2008
[7] L Lapierre and D Soetanto ldquoNonlinear path-following controlof an AUVrdquoOcean Engineering vol 34 no 11-12 pp 1734ndash17442007
[8] J Petrich and D J Stilwell ldquoRobust control for an autonomousunderwater vehicle that suppresses pitch and yaw couplingrdquoOcean Engineering vol 38 no 1 pp 197ndash204 2011
[9] L Moreira and C G Soares ldquo1198672 and 119867infin designs for divingand course control of an Autonomous underwater vehicle inpresence of wavesrdquo Journal of Oceanic Engineering vol 33 no2 pp 69ndash88 2008
[10] B K Sahu and B Subudhi ldquoAdaptive tracking control ofan autonomous underwater vehiclerdquo International Journal ofAutomation and Computing vol 11 no 3 pp 299ndash307 2014
[11] B B Miao T S Li and W L Luo ldquoA DSC and MLP basedrobust adaptive NN tracking control for underwater vehiclerdquoNeurocomputing vol 111 pp 184ndash189 2013
[12] L-J Zhang X Qi and Y-J Pang ldquoAdaptive output feedbackcontrol based on DRFNN for AUVrdquoOcean Engineering vol 36no 9-10 pp 716ndash722 2009
[13] B Geranmehr and S R Nekoo ldquoNonlinear suboptimal controlof fully coupled non-affine six-DOF autonomous underwatervehicle using the state-dependent Riccati equationrdquo OceanEngineering vol 96 pp 248ndash257 2015
[14] D W Kim ldquoTracking of REMUS autonomous underwatervehicles with actuator saturationsrdquo Automatica vol 58 pp 15ndash21 2015
[15] F Repoulias and E Papadopoulos ldquoPlanar trajectory planningand tracking control design for underactuated AUVsrdquo OceanEngineering vol 34 no 11-12 pp 1650ndash1667 2007
[16] S-W Shi W-S Yan J Gao and W-B Li ldquoPath-followingcontrol of an AUV in the horizontal plane with constant oceancurrentsrdquo Acta Armamentarii vol 31 no 3 pp 375ndash379 2010
[17] X-Q Cheng J-Y Qu Z-P Yan and X-Q Bian ldquoHinfin robustfault-tolerant controller design for an autonomous underwatervehiclersquos navigation control systemrdquo Journal of Marine Scienceand Application vol 9 no 1 pp 87ndash92 2010
[18] S Liu DWang and E Poh ldquoNon-linear output feedback track-ing control for AUVs in shallow wave disturbance conditionrdquoInternational Journal of Control vol 81 no 11 pp 1806ndash18232008
[19] A P Aguiar and AM Pascoal ldquoDynamic positioning and way-point tracking of underactuated AUVs in the presence of oceancurrentsrdquo International Journal of Control vol 80 no 7 pp1092ndash1108 2007
[20] F-D Gao C-Y Pan Y-Y Han and X Zhang ldquoNonlineartrajectory tracking control of a new autonomous underwatervehicle in complex sea conditionsrdquo Journal of Central SouthUniversity vol 19 no 7 pp 1859ndash1868 2012
[21] L-J Zhang X Qi Y-J Pang and D-P Jiang ldquoAdaptiveoutput feedback control for trajectory tracking of AUV inwave disturbance conditionrdquo International Journal of WaveletsMultiresolution and Information Processing vol 11 no 3 pp 1ndash15 2013
[22] H Joe M Kim and S-C Yu ldquoSecond-order sliding-mode con-troller for autonomous underwater vehicle in the presence ofunknown disturbancesrdquo Nonlinear Dynamics vol 78 no 1 pp183ndash196 2014
[23] H-G Zhang Q-L Wei and Y-H Luo ldquoA novel infinite-timeoptimal tracking control scheme for a class of discrete-timenonlinear systems via the greedy HDP iteration algorithmrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 38 no 4 pp 937ndash942 2008
[24] Q-L Wei H-G Zhang D-R Liu and Y Zhao ldquoAn optimalcontrol scheme for a class of discrete-time nonlinear systemswith time delays using adaptive dynamic programmingrdquo ActaAutomatica Sinica vol 36 no 1 pp 121ndash129 2010
[25] Q-X Qu Y-H Luo and H-G Zhang ldquoRobust approximateoptimal tracking control of time-varying trajectory for nonlin-ear affine systemsrdquo Control Theory amp Applications vol 33 no 1pp 77ndash84 2016
[26] G-Y Tang ldquoSuboptimal control for nonlinear systems a suc-cessive approximation approachrdquo Systems and Control Lettersvol 54 no 5 pp 429ndash434 2005
[27] G-Y Tang and D-X Gao ldquoApproximation design of optimalcontrollers for nonlinear systems with sinusoidal disturbancesrdquoNonlinear Analysis Theory Methods amp Applications vol 66 no2 pp 403ndash414 2007
[28] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[29] T Prestero Verification of a Six-Degree of Freedom SimulationModel for the REMUS Autonomous Underwater Vehicles MIT2001
[30] O-E Fjellstad and T I Fossen ldquoPosition and attitude trackingof AUVrsquos a quaternion feedback approachrdquo IEEE Journal ofOceanic Engineering vol 19 no 4 pp 512ndash518 1994
[31] Q Yang H Su and G-Y Tang ldquoApproximate optimal trackingcontrol for near-surface AUVs with wave disturbancesrdquo Journalof Ocean University of China vol 15 no 5 pp 789ndash798 2016
[32] H Ma G-Y Tang and W Hu ldquoFeedforward and feedbackoptimal control with memory for offshore platforms underirregular wave forcesrdquo Journal of Sound and Vibration vol 328no 4-5 pp 369ndash381 2009
[33] B-L Zhang and Q-L Han ldquoNetwork-based modelling andactive control for offshore steel jacket platform with TMDmechanismsrdquo Journal of Sound and Vibration vol 333 pp6796ndash6814 2014
[34] S-Y Han D Wang Y-H Chen G-Y Tang and X-X YangldquoOptimal tracking control for discrete-time systems with mul-tiple input delays under sinusoidal disturbancesrdquo InternationalJournal of Control Automation and Systems vol 13 no 2 pp292ndash301 2015
[35] X-Q Cheng Research on the Robust Heading Control forAUV Based on Feedback Linearization in Near Surface HarbinEngineering University Harbin China 2008
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
and the state equation sequence
119909(0) (119905) equiv 0(119896) (119905) = (119860 minus 119878119875) 119909(119896) (119905) + (119863119867 minus 119878119875)119908 (119905)
minus 119878119892(119896) (119905) + 119891 (119909(119896minus1) 119905) 119909(119896) (1199050) = 1199090
119896 = 1 2
(26)
It can be proved that the adjoint vector solution sequence119892(119896)(119905) in (25) uniformly converges to 119892(119905) and the statevector solution sequence 119909(119896)(119905) in (26) uniformly convergesto 119909(119905) [26 27 31 34]
When 119896 rarr infin the limits of 119909(119896)(119905) and 119892(119896)(119905) becomethe optimal state vector 119909lowast(119905) and the optimal adjoint vector119892(119905)
Define 119892(infin)(119905) = lim119896rarrinfin119892(119896)(119905) then the ODRC law isrewritten as (19) This completes the proof
Remark 3 It is usually impossible to obtain the exact adjointvector 119892(infin)(119905) when designing the ODRC law in practice Inmany cases it may be better to choose an 119892(119873)(119905) as theapproximation of 119892(infin)(119905) where 119873 depends on a concreteerror coefficient 120576 gt 0The119873th-orderODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] (27)
Remark 4 The 119873th-order ODRC law consists of a feedbackterm 119875119909(119905) a feedforward disturbances rejection term 119875119908(119905)and a nonlinear compensatory term 119892(119873)(119905)Remark 5 Thewave disturbances are difficult to bemeasuredand obtained and 119908(119905) is the state vectors of system (15)the ODRC law is physically unrealizable in practice Sowe construct a Luenberger disturbances observer to make itrealizable as follows
119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (28)
where 119908(119905) is the observation value of 119908(119905) and 119871 is theobserver matrix of appropriate dimensions We can choosethe appropriate dimensions matrix 119871 and the eigenvalues ofthe matrix (119865 minus 119871119867) have negative real parts Then the 119873th-order ODRC law is as follows
119906119873 (119905) = minus119877minus1119861119879 [119875119909 (119905) + 119875119908 (119905) + 119892(119873) (119905)] 119908 (119905) = (119865 minus 119871119867)119908 (119905) + 119871119889 (119905) (29)
4 Example and Simulation
41 Simulation Model and Parameters for AUVs and WaveForce Disturbances In this section a simulation study is car-ried out using a typical AUV model [35] to demonstrate theperformance of the proposed approach The hydrodynamiccoefficients of an AUV are shown in Table 2
Table 2 Hydrodynamic coefficients of the AUV
Name Symbol Numerical UnitQuality 119898 67831 kgLength 119871 5720 mSea-water density 120588 1025 kgm3
Dimensionlesscoefficient of swayforce
1198841015840 V minus39854
10minus3
1198841015840 119903 125671198841015840V|V| minus257041198841015840119903|119903| 99811198841015840119906V minus418581198841015840119906119903 104351198841015840120575119903 18509
Dimensionlesscoefficient of yawmoment
1198731015840 V minus38721198731015840 119903 minus21051198731015840V|V| 174801198731015840119903|119903| minus64631198731015840119906V minus28781198731015840119906119903 minus94361198731015840120575119903 minus9754
Assuming that the axial velocity is 1199060 = 2ms thesignificant wave height is 11986713 = 4m and encounter anglefrequency of wave is 06320 rads and 10470 rads then thePSD of the wave height is shown in Figure 2
And the wave force can be calculated from (11) which isshown in Figure 3
The matrices and vector of the AUVs heading controlsystem (6) are as follows
119860 =[[[[[[
minus01966 minus11472 0 0minus00780 minus06558 0 0
0 minus1 0 00 0 1 0
]]]]]]
119861 =[[[[[[
0196202165
00
]]]]]]
119863 =[[[[[[
0000200273
00
]]]]]]
119891 (119909 119905) =[[[[[[
minus1697711990912 + 2439611990922 minus 26767119909111990920045811990912 minus 0554111990922 minus 0036511990911199092
00
]]]]]]
(30)
Mathematical Problems in Engineering 7
Table 3 119869119873 and Δ119869 at different iteration times
119896 1 2 3 4 5119869119873 152455 113397 101086 97592 97452Δ119869 03444 01218 00358 00014
05 1 15 2 25 30Frequency (rads)
0
1
2
3
4
5
6
7
8
PSD
of w
ave h
eigh
t (G
2s
)
w = 06320 radsw = 10470 rads
Figure 2 PSD of wave height
The parameters for the average quadratic performanceindex (16) are chosen as
119876 =[[[[[[
1 0 0 00 1 0 00 0 1 00 0 0 1
]]]]]]
119877 = 5
(31)
By solving (20) and (21) we obtain
119875 =[[[[[[
65444 minus139363 31885 02422minus139363 796598 minus568132 minus10547831885 minus568132 569366 13129302422 minus105478 131293 52210
]]]]]]
119875 =[[[[[[
minus12713 minus06152 minus112055 minus54904195865 91021 574458 307596minus196954 minus95852 minus349479 minus209735minus45788 minus24965 minus42104 minus34488
]]]]]]
(32)
42 Simulation Results and Analysis Based on the AUVmodel and parameters the state vector is considered as119909 = [V 119903 120595119890 120595119868]119879 the simulation curves 119909(119905) and 119906(119905) atdifferent iteration times are shown in Figures 4ndash8
The average quadratic performance index values 119869119873 anderrors Δ119869 = |(119869119873minus1 minus 119869119873)119869119873| lt 120576 at different iteration timesare listed in Table 3 and 120576 is the control precision
10 20 30 40 50 60 70 80 90 1000Time (s)
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Am
plitu
de (m
)
Figure 3 Numerical simulation of the random wave force
10 20 30 40 50 60 70 80 90 1000Time (s)
minus3
minus2
minus1
0
1
2
3
k = 1k = 2
k = 4
x1(t
)
Figure 4 The simulation curves of 1199091(119905)
From Table 3 it can be seen clearly that the averagequadratic performance index values decrease as iterationtimes increase and tend to a deterministic optimal value 119869lowastultimately If we choose the control precision 120576 = 005 thenthe relative error of the average quadratic performance indexvalues satisfies |(1198693 minus 1198694)1198694| lt 120576 It indicates that the 4thODRC law 1199064(119905) is very close to the optimal control law119906lowast(119905) It is obvious that the proposed approach requires a fewiterations to get the approximate ODRC law And it is morerobust about current and wave disturbances Simulationresults show that the proposed approach applied to the AUVsis effective
5 Conclusion
In this paper the disturbances rejection control problemfor the AUVs heading control system has been consid-ered and an ODRC approach has been designed For thedesign nonlinearities in the AUVs system are retainedand disturbances for the AUVs system are considered Byusing a successive approximation approach an ODRC law isproposed based on the quadratic optimal control theory
8 Mathematical Problems in Engineering
10 20 30 40 50 60 70 80 90 1000Time (s)
k = 1k = 2
k = 4
minus2
minus15
minus1
minus05
0
05
1
15
2
x2(t
)
Figure 5 The simulation curves of 1199092(119905)
10 20 30 40 50 60 70 80 90 1000Time (s)
minus2
minus15
minus1
minus05
0
05
1
15
2
k = 1k = 2
k = 4
x3(t
)
Figure 6 The simulation curves of 1199093(119905)
0 10 20 30 40 50 60 70 80 90 100Time (s)
k = 1k = 2
k = 4
minus3
minus2
minus1
0
1
2
3
4
x4(t
)
Figure 7 The simulation curves of 1199094(119905)
k = 1k = 2
k = 4
10 20 30 40 50 60 70 80 90 1000Time (s)
minus15
minus1
minus05
0
05
1
15
2
u(t
)
Figure 8 The simulation curves of 119906(119905)
which consists of the optimal feedback item the feedforwarddisturbances rejection item and the nonlinear compensatoryitem Finally the effectiveness of the proposed approach hasbeen illustrated by an AUV model
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This study was supported in part by the National Natu-ral Science Foundation of China (61673357 41276085 and61572448) and by the Natural Science Excellence Foundationof Shandong Province (ZR2015FM004 and ZR2014JL043)
References
[1] R B Wynn V A I Huvenne T P Le Bas et al ldquoAutonomousUnderwater Vehicles (AUVs) their past present and futurecontributions to the advancement of marine geosciencerdquoMarine Geology vol 352 pp 451ndash468 2014
[2] G Bartolini and A Pisano ldquoBlack-box position and attitudetracking for underwater vehicles by second-order sliding-mode techniquerdquo International Journal of Robust and NonlinearControl vol 20 no 14 pp 1594ndash1609 2010
[3] L Wang H-M Jia L-J Zhang and H-B Wang ldquoHorizontaltracking control for AUV based on nonlinear sliding moderdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo12) vol 1 pp 460ndash463 2012
[4] Z-P Yan D Wu J-J Zhou and X Zhang ldquoApplicationof extension integral variable structure control method onsimulation of AUV heading control systemrdquo in Proceedings ofthe 30th Chinese Control Conference vol 7 pp 2617ndash2621 July2011
[5] J Ghommam and M Saad ldquoBackstepping-based cooperativeand adaptive tracking control design for a group of underactu-ated AUVs in horizontal planrdquo International Journal of Controlvol 87 no 5 pp 1076ndash1093 2014
Mathematical Problems in Engineering 9
[6] L Lapierre and B Jouvencel ldquoRobust nonlinear path-followingcontrol of an AUVrdquo IEEE Journal of Oceanic Engineering vol 33no 2 pp 89ndash102 2008
[7] L Lapierre and D Soetanto ldquoNonlinear path-following controlof an AUVrdquoOcean Engineering vol 34 no 11-12 pp 1734ndash17442007
[8] J Petrich and D J Stilwell ldquoRobust control for an autonomousunderwater vehicle that suppresses pitch and yaw couplingrdquoOcean Engineering vol 38 no 1 pp 197ndash204 2011
[9] L Moreira and C G Soares ldquo1198672 and 119867infin designs for divingand course control of an Autonomous underwater vehicle inpresence of wavesrdquo Journal of Oceanic Engineering vol 33 no2 pp 69ndash88 2008
[10] B K Sahu and B Subudhi ldquoAdaptive tracking control ofan autonomous underwater vehiclerdquo International Journal ofAutomation and Computing vol 11 no 3 pp 299ndash307 2014
[11] B B Miao T S Li and W L Luo ldquoA DSC and MLP basedrobust adaptive NN tracking control for underwater vehiclerdquoNeurocomputing vol 111 pp 184ndash189 2013
[12] L-J Zhang X Qi and Y-J Pang ldquoAdaptive output feedbackcontrol based on DRFNN for AUVrdquoOcean Engineering vol 36no 9-10 pp 716ndash722 2009
[13] B Geranmehr and S R Nekoo ldquoNonlinear suboptimal controlof fully coupled non-affine six-DOF autonomous underwatervehicle using the state-dependent Riccati equationrdquo OceanEngineering vol 96 pp 248ndash257 2015
[14] D W Kim ldquoTracking of REMUS autonomous underwatervehicles with actuator saturationsrdquo Automatica vol 58 pp 15ndash21 2015
[15] F Repoulias and E Papadopoulos ldquoPlanar trajectory planningand tracking control design for underactuated AUVsrdquo OceanEngineering vol 34 no 11-12 pp 1650ndash1667 2007
[16] S-W Shi W-S Yan J Gao and W-B Li ldquoPath-followingcontrol of an AUV in the horizontal plane with constant oceancurrentsrdquo Acta Armamentarii vol 31 no 3 pp 375ndash379 2010
[17] X-Q Cheng J-Y Qu Z-P Yan and X-Q Bian ldquoHinfin robustfault-tolerant controller design for an autonomous underwatervehiclersquos navigation control systemrdquo Journal of Marine Scienceand Application vol 9 no 1 pp 87ndash92 2010
[18] S Liu DWang and E Poh ldquoNon-linear output feedback track-ing control for AUVs in shallow wave disturbance conditionrdquoInternational Journal of Control vol 81 no 11 pp 1806ndash18232008
[19] A P Aguiar and AM Pascoal ldquoDynamic positioning and way-point tracking of underactuated AUVs in the presence of oceancurrentsrdquo International Journal of Control vol 80 no 7 pp1092ndash1108 2007
[20] F-D Gao C-Y Pan Y-Y Han and X Zhang ldquoNonlineartrajectory tracking control of a new autonomous underwatervehicle in complex sea conditionsrdquo Journal of Central SouthUniversity vol 19 no 7 pp 1859ndash1868 2012
[21] L-J Zhang X Qi Y-J Pang and D-P Jiang ldquoAdaptiveoutput feedback control for trajectory tracking of AUV inwave disturbance conditionrdquo International Journal of WaveletsMultiresolution and Information Processing vol 11 no 3 pp 1ndash15 2013
[22] H Joe M Kim and S-C Yu ldquoSecond-order sliding-mode con-troller for autonomous underwater vehicle in the presence ofunknown disturbancesrdquo Nonlinear Dynamics vol 78 no 1 pp183ndash196 2014
[23] H-G Zhang Q-L Wei and Y-H Luo ldquoA novel infinite-timeoptimal tracking control scheme for a class of discrete-timenonlinear systems via the greedy HDP iteration algorithmrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 38 no 4 pp 937ndash942 2008
[24] Q-L Wei H-G Zhang D-R Liu and Y Zhao ldquoAn optimalcontrol scheme for a class of discrete-time nonlinear systemswith time delays using adaptive dynamic programmingrdquo ActaAutomatica Sinica vol 36 no 1 pp 121ndash129 2010
[25] Q-X Qu Y-H Luo and H-G Zhang ldquoRobust approximateoptimal tracking control of time-varying trajectory for nonlin-ear affine systemsrdquo Control Theory amp Applications vol 33 no 1pp 77ndash84 2016
[26] G-Y Tang ldquoSuboptimal control for nonlinear systems a suc-cessive approximation approachrdquo Systems and Control Lettersvol 54 no 5 pp 429ndash434 2005
[27] G-Y Tang and D-X Gao ldquoApproximation design of optimalcontrollers for nonlinear systems with sinusoidal disturbancesrdquoNonlinear Analysis Theory Methods amp Applications vol 66 no2 pp 403ndash414 2007
[28] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[29] T Prestero Verification of a Six-Degree of Freedom SimulationModel for the REMUS Autonomous Underwater Vehicles MIT2001
[30] O-E Fjellstad and T I Fossen ldquoPosition and attitude trackingof AUVrsquos a quaternion feedback approachrdquo IEEE Journal ofOceanic Engineering vol 19 no 4 pp 512ndash518 1994
[31] Q Yang H Su and G-Y Tang ldquoApproximate optimal trackingcontrol for near-surface AUVs with wave disturbancesrdquo Journalof Ocean University of China vol 15 no 5 pp 789ndash798 2016
[32] H Ma G-Y Tang and W Hu ldquoFeedforward and feedbackoptimal control with memory for offshore platforms underirregular wave forcesrdquo Journal of Sound and Vibration vol 328no 4-5 pp 369ndash381 2009
[33] B-L Zhang and Q-L Han ldquoNetwork-based modelling andactive control for offshore steel jacket platform with TMDmechanismsrdquo Journal of Sound and Vibration vol 333 pp6796ndash6814 2014
[34] S-Y Han D Wang Y-H Chen G-Y Tang and X-X YangldquoOptimal tracking control for discrete-time systems with mul-tiple input delays under sinusoidal disturbancesrdquo InternationalJournal of Control Automation and Systems vol 13 no 2 pp292ndash301 2015
[35] X-Q Cheng Research on the Robust Heading Control forAUV Based on Feedback Linearization in Near Surface HarbinEngineering University Harbin China 2008
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Table 3 119869119873 and Δ119869 at different iteration times
119896 1 2 3 4 5119869119873 152455 113397 101086 97592 97452Δ119869 03444 01218 00358 00014
05 1 15 2 25 30Frequency (rads)
0
1
2
3
4
5
6
7
8
PSD
of w
ave h
eigh
t (G
2s
)
w = 06320 radsw = 10470 rads
Figure 2 PSD of wave height
The parameters for the average quadratic performanceindex (16) are chosen as
119876 =[[[[[[
1 0 0 00 1 0 00 0 1 00 0 0 1
]]]]]]
119877 = 5
(31)
By solving (20) and (21) we obtain
119875 =[[[[[[
65444 minus139363 31885 02422minus139363 796598 minus568132 minus10547831885 minus568132 569366 13129302422 minus105478 131293 52210
]]]]]]
119875 =[[[[[[
minus12713 minus06152 minus112055 minus54904195865 91021 574458 307596minus196954 minus95852 minus349479 minus209735minus45788 minus24965 minus42104 minus34488
]]]]]]
(32)
42 Simulation Results and Analysis Based on the AUVmodel and parameters the state vector is considered as119909 = [V 119903 120595119890 120595119868]119879 the simulation curves 119909(119905) and 119906(119905) atdifferent iteration times are shown in Figures 4ndash8
The average quadratic performance index values 119869119873 anderrors Δ119869 = |(119869119873minus1 minus 119869119873)119869119873| lt 120576 at different iteration timesare listed in Table 3 and 120576 is the control precision
10 20 30 40 50 60 70 80 90 1000Time (s)
minus08
minus06
minus04
minus02
0
02
04
06
08
1
Am
plitu
de (m
)
Figure 3 Numerical simulation of the random wave force
10 20 30 40 50 60 70 80 90 1000Time (s)
minus3
minus2
minus1
0
1
2
3
k = 1k = 2
k = 4
x1(t
)
Figure 4 The simulation curves of 1199091(119905)
From Table 3 it can be seen clearly that the averagequadratic performance index values decrease as iterationtimes increase and tend to a deterministic optimal value 119869lowastultimately If we choose the control precision 120576 = 005 thenthe relative error of the average quadratic performance indexvalues satisfies |(1198693 minus 1198694)1198694| lt 120576 It indicates that the 4thODRC law 1199064(119905) is very close to the optimal control law119906lowast(119905) It is obvious that the proposed approach requires a fewiterations to get the approximate ODRC law And it is morerobust about current and wave disturbances Simulationresults show that the proposed approach applied to the AUVsis effective
5 Conclusion
In this paper the disturbances rejection control problemfor the AUVs heading control system has been consid-ered and an ODRC approach has been designed For thedesign nonlinearities in the AUVs system are retainedand disturbances for the AUVs system are considered Byusing a successive approximation approach an ODRC law isproposed based on the quadratic optimal control theory
8 Mathematical Problems in Engineering
10 20 30 40 50 60 70 80 90 1000Time (s)
k = 1k = 2
k = 4
minus2
minus15
minus1
minus05
0
05
1
15
2
x2(t
)
Figure 5 The simulation curves of 1199092(119905)
10 20 30 40 50 60 70 80 90 1000Time (s)
minus2
minus15
minus1
minus05
0
05
1
15
2
k = 1k = 2
k = 4
x3(t
)
Figure 6 The simulation curves of 1199093(119905)
0 10 20 30 40 50 60 70 80 90 100Time (s)
k = 1k = 2
k = 4
minus3
minus2
minus1
0
1
2
3
4
x4(t
)
Figure 7 The simulation curves of 1199094(119905)
k = 1k = 2
k = 4
10 20 30 40 50 60 70 80 90 1000Time (s)
minus15
minus1
minus05
0
05
1
15
2
u(t
)
Figure 8 The simulation curves of 119906(119905)
which consists of the optimal feedback item the feedforwarddisturbances rejection item and the nonlinear compensatoryitem Finally the effectiveness of the proposed approach hasbeen illustrated by an AUV model
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This study was supported in part by the National Natu-ral Science Foundation of China (61673357 41276085 and61572448) and by the Natural Science Excellence Foundationof Shandong Province (ZR2015FM004 and ZR2014JL043)
References
[1] R B Wynn V A I Huvenne T P Le Bas et al ldquoAutonomousUnderwater Vehicles (AUVs) their past present and futurecontributions to the advancement of marine geosciencerdquoMarine Geology vol 352 pp 451ndash468 2014
[2] G Bartolini and A Pisano ldquoBlack-box position and attitudetracking for underwater vehicles by second-order sliding-mode techniquerdquo International Journal of Robust and NonlinearControl vol 20 no 14 pp 1594ndash1609 2010
[3] L Wang H-M Jia L-J Zhang and H-B Wang ldquoHorizontaltracking control for AUV based on nonlinear sliding moderdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo12) vol 1 pp 460ndash463 2012
[4] Z-P Yan D Wu J-J Zhou and X Zhang ldquoApplicationof extension integral variable structure control method onsimulation of AUV heading control systemrdquo in Proceedings ofthe 30th Chinese Control Conference vol 7 pp 2617ndash2621 July2011
[5] J Ghommam and M Saad ldquoBackstepping-based cooperativeand adaptive tracking control design for a group of underactu-ated AUVs in horizontal planrdquo International Journal of Controlvol 87 no 5 pp 1076ndash1093 2014
Mathematical Problems in Engineering 9
[6] L Lapierre and B Jouvencel ldquoRobust nonlinear path-followingcontrol of an AUVrdquo IEEE Journal of Oceanic Engineering vol 33no 2 pp 89ndash102 2008
[7] L Lapierre and D Soetanto ldquoNonlinear path-following controlof an AUVrdquoOcean Engineering vol 34 no 11-12 pp 1734ndash17442007
[8] J Petrich and D J Stilwell ldquoRobust control for an autonomousunderwater vehicle that suppresses pitch and yaw couplingrdquoOcean Engineering vol 38 no 1 pp 197ndash204 2011
[9] L Moreira and C G Soares ldquo1198672 and 119867infin designs for divingand course control of an Autonomous underwater vehicle inpresence of wavesrdquo Journal of Oceanic Engineering vol 33 no2 pp 69ndash88 2008
[10] B K Sahu and B Subudhi ldquoAdaptive tracking control ofan autonomous underwater vehiclerdquo International Journal ofAutomation and Computing vol 11 no 3 pp 299ndash307 2014
[11] B B Miao T S Li and W L Luo ldquoA DSC and MLP basedrobust adaptive NN tracking control for underwater vehiclerdquoNeurocomputing vol 111 pp 184ndash189 2013
[12] L-J Zhang X Qi and Y-J Pang ldquoAdaptive output feedbackcontrol based on DRFNN for AUVrdquoOcean Engineering vol 36no 9-10 pp 716ndash722 2009
[13] B Geranmehr and S R Nekoo ldquoNonlinear suboptimal controlof fully coupled non-affine six-DOF autonomous underwatervehicle using the state-dependent Riccati equationrdquo OceanEngineering vol 96 pp 248ndash257 2015
[14] D W Kim ldquoTracking of REMUS autonomous underwatervehicles with actuator saturationsrdquo Automatica vol 58 pp 15ndash21 2015
[15] F Repoulias and E Papadopoulos ldquoPlanar trajectory planningand tracking control design for underactuated AUVsrdquo OceanEngineering vol 34 no 11-12 pp 1650ndash1667 2007
[16] S-W Shi W-S Yan J Gao and W-B Li ldquoPath-followingcontrol of an AUV in the horizontal plane with constant oceancurrentsrdquo Acta Armamentarii vol 31 no 3 pp 375ndash379 2010
[17] X-Q Cheng J-Y Qu Z-P Yan and X-Q Bian ldquoHinfin robustfault-tolerant controller design for an autonomous underwatervehiclersquos navigation control systemrdquo Journal of Marine Scienceand Application vol 9 no 1 pp 87ndash92 2010
[18] S Liu DWang and E Poh ldquoNon-linear output feedback track-ing control for AUVs in shallow wave disturbance conditionrdquoInternational Journal of Control vol 81 no 11 pp 1806ndash18232008
[19] A P Aguiar and AM Pascoal ldquoDynamic positioning and way-point tracking of underactuated AUVs in the presence of oceancurrentsrdquo International Journal of Control vol 80 no 7 pp1092ndash1108 2007
[20] F-D Gao C-Y Pan Y-Y Han and X Zhang ldquoNonlineartrajectory tracking control of a new autonomous underwatervehicle in complex sea conditionsrdquo Journal of Central SouthUniversity vol 19 no 7 pp 1859ndash1868 2012
[21] L-J Zhang X Qi Y-J Pang and D-P Jiang ldquoAdaptiveoutput feedback control for trajectory tracking of AUV inwave disturbance conditionrdquo International Journal of WaveletsMultiresolution and Information Processing vol 11 no 3 pp 1ndash15 2013
[22] H Joe M Kim and S-C Yu ldquoSecond-order sliding-mode con-troller for autonomous underwater vehicle in the presence ofunknown disturbancesrdquo Nonlinear Dynamics vol 78 no 1 pp183ndash196 2014
[23] H-G Zhang Q-L Wei and Y-H Luo ldquoA novel infinite-timeoptimal tracking control scheme for a class of discrete-timenonlinear systems via the greedy HDP iteration algorithmrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 38 no 4 pp 937ndash942 2008
[24] Q-L Wei H-G Zhang D-R Liu and Y Zhao ldquoAn optimalcontrol scheme for a class of discrete-time nonlinear systemswith time delays using adaptive dynamic programmingrdquo ActaAutomatica Sinica vol 36 no 1 pp 121ndash129 2010
[25] Q-X Qu Y-H Luo and H-G Zhang ldquoRobust approximateoptimal tracking control of time-varying trajectory for nonlin-ear affine systemsrdquo Control Theory amp Applications vol 33 no 1pp 77ndash84 2016
[26] G-Y Tang ldquoSuboptimal control for nonlinear systems a suc-cessive approximation approachrdquo Systems and Control Lettersvol 54 no 5 pp 429ndash434 2005
[27] G-Y Tang and D-X Gao ldquoApproximation design of optimalcontrollers for nonlinear systems with sinusoidal disturbancesrdquoNonlinear Analysis Theory Methods amp Applications vol 66 no2 pp 403ndash414 2007
[28] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[29] T Prestero Verification of a Six-Degree of Freedom SimulationModel for the REMUS Autonomous Underwater Vehicles MIT2001
[30] O-E Fjellstad and T I Fossen ldquoPosition and attitude trackingof AUVrsquos a quaternion feedback approachrdquo IEEE Journal ofOceanic Engineering vol 19 no 4 pp 512ndash518 1994
[31] Q Yang H Su and G-Y Tang ldquoApproximate optimal trackingcontrol for near-surface AUVs with wave disturbancesrdquo Journalof Ocean University of China vol 15 no 5 pp 789ndash798 2016
[32] H Ma G-Y Tang and W Hu ldquoFeedforward and feedbackoptimal control with memory for offshore platforms underirregular wave forcesrdquo Journal of Sound and Vibration vol 328no 4-5 pp 369ndash381 2009
[33] B-L Zhang and Q-L Han ldquoNetwork-based modelling andactive control for offshore steel jacket platform with TMDmechanismsrdquo Journal of Sound and Vibration vol 333 pp6796ndash6814 2014
[34] S-Y Han D Wang Y-H Chen G-Y Tang and X-X YangldquoOptimal tracking control for discrete-time systems with mul-tiple input delays under sinusoidal disturbancesrdquo InternationalJournal of Control Automation and Systems vol 13 no 2 pp292ndash301 2015
[35] X-Q Cheng Research on the Robust Heading Control forAUV Based on Feedback Linearization in Near Surface HarbinEngineering University Harbin China 2008
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
10 20 30 40 50 60 70 80 90 1000Time (s)
k = 1k = 2
k = 4
minus2
minus15
minus1
minus05
0
05
1
15
2
x2(t
)
Figure 5 The simulation curves of 1199092(119905)
10 20 30 40 50 60 70 80 90 1000Time (s)
minus2
minus15
minus1
minus05
0
05
1
15
2
k = 1k = 2
k = 4
x3(t
)
Figure 6 The simulation curves of 1199093(119905)
0 10 20 30 40 50 60 70 80 90 100Time (s)
k = 1k = 2
k = 4
minus3
minus2
minus1
0
1
2
3
4
x4(t
)
Figure 7 The simulation curves of 1199094(119905)
k = 1k = 2
k = 4
10 20 30 40 50 60 70 80 90 1000Time (s)
minus15
minus1
minus05
0
05
1
15
2
u(t
)
Figure 8 The simulation curves of 119906(119905)
which consists of the optimal feedback item the feedforwarddisturbances rejection item and the nonlinear compensatoryitem Finally the effectiveness of the proposed approach hasbeen illustrated by an AUV model
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This study was supported in part by the National Natu-ral Science Foundation of China (61673357 41276085 and61572448) and by the Natural Science Excellence Foundationof Shandong Province (ZR2015FM004 and ZR2014JL043)
References
[1] R B Wynn V A I Huvenne T P Le Bas et al ldquoAutonomousUnderwater Vehicles (AUVs) their past present and futurecontributions to the advancement of marine geosciencerdquoMarine Geology vol 352 pp 451ndash468 2014
[2] G Bartolini and A Pisano ldquoBlack-box position and attitudetracking for underwater vehicles by second-order sliding-mode techniquerdquo International Journal of Robust and NonlinearControl vol 20 no 14 pp 1594ndash1609 2010
[3] L Wang H-M Jia L-J Zhang and H-B Wang ldquoHorizontaltracking control for AUV based on nonlinear sliding moderdquo inProceedings of the IEEE International Conference on Informationand Automation (ICIA rsquo12) vol 1 pp 460ndash463 2012
[4] Z-P Yan D Wu J-J Zhou and X Zhang ldquoApplicationof extension integral variable structure control method onsimulation of AUV heading control systemrdquo in Proceedings ofthe 30th Chinese Control Conference vol 7 pp 2617ndash2621 July2011
[5] J Ghommam and M Saad ldquoBackstepping-based cooperativeand adaptive tracking control design for a group of underactu-ated AUVs in horizontal planrdquo International Journal of Controlvol 87 no 5 pp 1076ndash1093 2014
Mathematical Problems in Engineering 9
[6] L Lapierre and B Jouvencel ldquoRobust nonlinear path-followingcontrol of an AUVrdquo IEEE Journal of Oceanic Engineering vol 33no 2 pp 89ndash102 2008
[7] L Lapierre and D Soetanto ldquoNonlinear path-following controlof an AUVrdquoOcean Engineering vol 34 no 11-12 pp 1734ndash17442007
[8] J Petrich and D J Stilwell ldquoRobust control for an autonomousunderwater vehicle that suppresses pitch and yaw couplingrdquoOcean Engineering vol 38 no 1 pp 197ndash204 2011
[9] L Moreira and C G Soares ldquo1198672 and 119867infin designs for divingand course control of an Autonomous underwater vehicle inpresence of wavesrdquo Journal of Oceanic Engineering vol 33 no2 pp 69ndash88 2008
[10] B K Sahu and B Subudhi ldquoAdaptive tracking control ofan autonomous underwater vehiclerdquo International Journal ofAutomation and Computing vol 11 no 3 pp 299ndash307 2014
[11] B B Miao T S Li and W L Luo ldquoA DSC and MLP basedrobust adaptive NN tracking control for underwater vehiclerdquoNeurocomputing vol 111 pp 184ndash189 2013
[12] L-J Zhang X Qi and Y-J Pang ldquoAdaptive output feedbackcontrol based on DRFNN for AUVrdquoOcean Engineering vol 36no 9-10 pp 716ndash722 2009
[13] B Geranmehr and S R Nekoo ldquoNonlinear suboptimal controlof fully coupled non-affine six-DOF autonomous underwatervehicle using the state-dependent Riccati equationrdquo OceanEngineering vol 96 pp 248ndash257 2015
[14] D W Kim ldquoTracking of REMUS autonomous underwatervehicles with actuator saturationsrdquo Automatica vol 58 pp 15ndash21 2015
[15] F Repoulias and E Papadopoulos ldquoPlanar trajectory planningand tracking control design for underactuated AUVsrdquo OceanEngineering vol 34 no 11-12 pp 1650ndash1667 2007
[16] S-W Shi W-S Yan J Gao and W-B Li ldquoPath-followingcontrol of an AUV in the horizontal plane with constant oceancurrentsrdquo Acta Armamentarii vol 31 no 3 pp 375ndash379 2010
[17] X-Q Cheng J-Y Qu Z-P Yan and X-Q Bian ldquoHinfin robustfault-tolerant controller design for an autonomous underwatervehiclersquos navigation control systemrdquo Journal of Marine Scienceand Application vol 9 no 1 pp 87ndash92 2010
[18] S Liu DWang and E Poh ldquoNon-linear output feedback track-ing control for AUVs in shallow wave disturbance conditionrdquoInternational Journal of Control vol 81 no 11 pp 1806ndash18232008
[19] A P Aguiar and AM Pascoal ldquoDynamic positioning and way-point tracking of underactuated AUVs in the presence of oceancurrentsrdquo International Journal of Control vol 80 no 7 pp1092ndash1108 2007
[20] F-D Gao C-Y Pan Y-Y Han and X Zhang ldquoNonlineartrajectory tracking control of a new autonomous underwatervehicle in complex sea conditionsrdquo Journal of Central SouthUniversity vol 19 no 7 pp 1859ndash1868 2012
[21] L-J Zhang X Qi Y-J Pang and D-P Jiang ldquoAdaptiveoutput feedback control for trajectory tracking of AUV inwave disturbance conditionrdquo International Journal of WaveletsMultiresolution and Information Processing vol 11 no 3 pp 1ndash15 2013
[22] H Joe M Kim and S-C Yu ldquoSecond-order sliding-mode con-troller for autonomous underwater vehicle in the presence ofunknown disturbancesrdquo Nonlinear Dynamics vol 78 no 1 pp183ndash196 2014
[23] H-G Zhang Q-L Wei and Y-H Luo ldquoA novel infinite-timeoptimal tracking control scheme for a class of discrete-timenonlinear systems via the greedy HDP iteration algorithmrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 38 no 4 pp 937ndash942 2008
[24] Q-L Wei H-G Zhang D-R Liu and Y Zhao ldquoAn optimalcontrol scheme for a class of discrete-time nonlinear systemswith time delays using adaptive dynamic programmingrdquo ActaAutomatica Sinica vol 36 no 1 pp 121ndash129 2010
[25] Q-X Qu Y-H Luo and H-G Zhang ldquoRobust approximateoptimal tracking control of time-varying trajectory for nonlin-ear affine systemsrdquo Control Theory amp Applications vol 33 no 1pp 77ndash84 2016
[26] G-Y Tang ldquoSuboptimal control for nonlinear systems a suc-cessive approximation approachrdquo Systems and Control Lettersvol 54 no 5 pp 429ndash434 2005
[27] G-Y Tang and D-X Gao ldquoApproximation design of optimalcontrollers for nonlinear systems with sinusoidal disturbancesrdquoNonlinear Analysis Theory Methods amp Applications vol 66 no2 pp 403ndash414 2007
[28] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[29] T Prestero Verification of a Six-Degree of Freedom SimulationModel for the REMUS Autonomous Underwater Vehicles MIT2001
[30] O-E Fjellstad and T I Fossen ldquoPosition and attitude trackingof AUVrsquos a quaternion feedback approachrdquo IEEE Journal ofOceanic Engineering vol 19 no 4 pp 512ndash518 1994
[31] Q Yang H Su and G-Y Tang ldquoApproximate optimal trackingcontrol for near-surface AUVs with wave disturbancesrdquo Journalof Ocean University of China vol 15 no 5 pp 789ndash798 2016
[32] H Ma G-Y Tang and W Hu ldquoFeedforward and feedbackoptimal control with memory for offshore platforms underirregular wave forcesrdquo Journal of Sound and Vibration vol 328no 4-5 pp 369ndash381 2009
[33] B-L Zhang and Q-L Han ldquoNetwork-based modelling andactive control for offshore steel jacket platform with TMDmechanismsrdquo Journal of Sound and Vibration vol 333 pp6796ndash6814 2014
[34] S-Y Han D Wang Y-H Chen G-Y Tang and X-X YangldquoOptimal tracking control for discrete-time systems with mul-tiple input delays under sinusoidal disturbancesrdquo InternationalJournal of Control Automation and Systems vol 13 no 2 pp292ndash301 2015
[35] X-Q Cheng Research on the Robust Heading Control forAUV Based on Feedback Linearization in Near Surface HarbinEngineering University Harbin China 2008
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
[6] L Lapierre and B Jouvencel ldquoRobust nonlinear path-followingcontrol of an AUVrdquo IEEE Journal of Oceanic Engineering vol 33no 2 pp 89ndash102 2008
[7] L Lapierre and D Soetanto ldquoNonlinear path-following controlof an AUVrdquoOcean Engineering vol 34 no 11-12 pp 1734ndash17442007
[8] J Petrich and D J Stilwell ldquoRobust control for an autonomousunderwater vehicle that suppresses pitch and yaw couplingrdquoOcean Engineering vol 38 no 1 pp 197ndash204 2011
[9] L Moreira and C G Soares ldquo1198672 and 119867infin designs for divingand course control of an Autonomous underwater vehicle inpresence of wavesrdquo Journal of Oceanic Engineering vol 33 no2 pp 69ndash88 2008
[10] B K Sahu and B Subudhi ldquoAdaptive tracking control ofan autonomous underwater vehiclerdquo International Journal ofAutomation and Computing vol 11 no 3 pp 299ndash307 2014
[11] B B Miao T S Li and W L Luo ldquoA DSC and MLP basedrobust adaptive NN tracking control for underwater vehiclerdquoNeurocomputing vol 111 pp 184ndash189 2013
[12] L-J Zhang X Qi and Y-J Pang ldquoAdaptive output feedbackcontrol based on DRFNN for AUVrdquoOcean Engineering vol 36no 9-10 pp 716ndash722 2009
[13] B Geranmehr and S R Nekoo ldquoNonlinear suboptimal controlof fully coupled non-affine six-DOF autonomous underwatervehicle using the state-dependent Riccati equationrdquo OceanEngineering vol 96 pp 248ndash257 2015
[14] D W Kim ldquoTracking of REMUS autonomous underwatervehicles with actuator saturationsrdquo Automatica vol 58 pp 15ndash21 2015
[15] F Repoulias and E Papadopoulos ldquoPlanar trajectory planningand tracking control design for underactuated AUVsrdquo OceanEngineering vol 34 no 11-12 pp 1650ndash1667 2007
[16] S-W Shi W-S Yan J Gao and W-B Li ldquoPath-followingcontrol of an AUV in the horizontal plane with constant oceancurrentsrdquo Acta Armamentarii vol 31 no 3 pp 375ndash379 2010
[17] X-Q Cheng J-Y Qu Z-P Yan and X-Q Bian ldquoHinfin robustfault-tolerant controller design for an autonomous underwatervehiclersquos navigation control systemrdquo Journal of Marine Scienceand Application vol 9 no 1 pp 87ndash92 2010
[18] S Liu DWang and E Poh ldquoNon-linear output feedback track-ing control for AUVs in shallow wave disturbance conditionrdquoInternational Journal of Control vol 81 no 11 pp 1806ndash18232008
[19] A P Aguiar and AM Pascoal ldquoDynamic positioning and way-point tracking of underactuated AUVs in the presence of oceancurrentsrdquo International Journal of Control vol 80 no 7 pp1092ndash1108 2007
[20] F-D Gao C-Y Pan Y-Y Han and X Zhang ldquoNonlineartrajectory tracking control of a new autonomous underwatervehicle in complex sea conditionsrdquo Journal of Central SouthUniversity vol 19 no 7 pp 1859ndash1868 2012
[21] L-J Zhang X Qi Y-J Pang and D-P Jiang ldquoAdaptiveoutput feedback control for trajectory tracking of AUV inwave disturbance conditionrdquo International Journal of WaveletsMultiresolution and Information Processing vol 11 no 3 pp 1ndash15 2013
[22] H Joe M Kim and S-C Yu ldquoSecond-order sliding-mode con-troller for autonomous underwater vehicle in the presence ofunknown disturbancesrdquo Nonlinear Dynamics vol 78 no 1 pp183ndash196 2014
[23] H-G Zhang Q-L Wei and Y-H Luo ldquoA novel infinite-timeoptimal tracking control scheme for a class of discrete-timenonlinear systems via the greedy HDP iteration algorithmrdquoIEEE Transactions on Systems Man and Cybernetics Part BCybernetics vol 38 no 4 pp 937ndash942 2008
[24] Q-L Wei H-G Zhang D-R Liu and Y Zhao ldquoAn optimalcontrol scheme for a class of discrete-time nonlinear systemswith time delays using adaptive dynamic programmingrdquo ActaAutomatica Sinica vol 36 no 1 pp 121ndash129 2010
[25] Q-X Qu Y-H Luo and H-G Zhang ldquoRobust approximateoptimal tracking control of time-varying trajectory for nonlin-ear affine systemsrdquo Control Theory amp Applications vol 33 no 1pp 77ndash84 2016
[26] G-Y Tang ldquoSuboptimal control for nonlinear systems a suc-cessive approximation approachrdquo Systems and Control Lettersvol 54 no 5 pp 429ndash434 2005
[27] G-Y Tang and D-X Gao ldquoApproximation design of optimalcontrollers for nonlinear systems with sinusoidal disturbancesrdquoNonlinear Analysis Theory Methods amp Applications vol 66 no2 pp 403ndash414 2007
[28] T I FossenGuidance and Control of Ocean Vehicles JohnWileyamp Sons New York NY USA 1994
[29] T Prestero Verification of a Six-Degree of Freedom SimulationModel for the REMUS Autonomous Underwater Vehicles MIT2001
[30] O-E Fjellstad and T I Fossen ldquoPosition and attitude trackingof AUVrsquos a quaternion feedback approachrdquo IEEE Journal ofOceanic Engineering vol 19 no 4 pp 512ndash518 1994
[31] Q Yang H Su and G-Y Tang ldquoApproximate optimal trackingcontrol for near-surface AUVs with wave disturbancesrdquo Journalof Ocean University of China vol 15 no 5 pp 789ndash798 2016
[32] H Ma G-Y Tang and W Hu ldquoFeedforward and feedbackoptimal control with memory for offshore platforms underirregular wave forcesrdquo Journal of Sound and Vibration vol 328no 4-5 pp 369ndash381 2009
[33] B-L Zhang and Q-L Han ldquoNetwork-based modelling andactive control for offshore steel jacket platform with TMDmechanismsrdquo Journal of Sound and Vibration vol 333 pp6796ndash6814 2014
[34] S-Y Han D Wang Y-H Chen G-Y Tang and X-X YangldquoOptimal tracking control for discrete-time systems with mul-tiple input delays under sinusoidal disturbancesrdquo InternationalJournal of Control Automation and Systems vol 13 no 2 pp292ndash301 2015
[35] X-Q Cheng Research on the Robust Heading Control forAUV Based on Feedback Linearization in Near Surface HarbinEngineering University Harbin China 2008
Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpswwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 201
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of