Embed Size (px)
Citation preview

Optimal Estimation of Optimal Estimation of Deterioration from Deterioration from
Diagnostic Image SequenceDiagnostic Image SequenceDimitry Gorinevsky
Consulting Professor of EE, [email protected]
joint work with Seung Jean Kim and Stephen Boyd, EE, Stanford
Shawn Beard, Acellent Inc. Grant Gordon, Honeywell
Fu-Kuo Chang, AA, Stanfordsupported by NSF GOALI grant

Algorithmic Approach
• Least Squares (Gauss, circa 1800)
– broadly used in aerospace systems• Quadratic Programming – QP (circa 1980)
– somewhat used in aerospace systems
min2 →−bAx
0 subject tomin2
1
≤−
→+
dCxxqHxx TT
2March 2007

Application
• Structural Health Monitoring – SHM – Inspections make 25% of aircraft life cycle cost
• SHM sensing system– not in this work
• Signal processing, estimation
3March 2007

Application: Structural Monitoring
A300-600 crash in NYAA 587 B-52 introduced in 1955
4March 2007

New Aircraft• SHM Drivers
– Maintenance cost reduction
– Composite aircraft• Safety-critical
function: decides flightworthiness
5March 2007
Airbus 380Airbus 380
Boeing 787Boeing 787

SHM Integration
• Honeywell avionics integration
Operations
Maintenance
Fleet
Data
On Ground Central
Maintenance Computer
CMC
Aircraft IVHM
B777, Primus,…
OnboardFlight Ctrls
Member Systems
…
Propulsion Utilities
Avionics Cabin
SHM
Supply Chain
Gorinevsky, Gordon, Beard, Kumar & Chang, IWSHM’056March 2007

Diagnostic Image Data
7March 2007
• Example SHM data• Series of images
– 3-D data• Damage trend
distorted by noise
Problem: Estimate underlying damage

Bayesian Estimation
• Data:
• Bayes rule
• Observation model:• Prior (trend model):• Maximum A posteriori Probability estimation
)}(),...,1({}{)}(),...,1({}{TXXX
TYYY==
Observed
Underlying trend
c XPXYPYXP ⋅⋅= })({}){|}({}){|}({
}){|}({ XYP})({XP
( ) ( ) min}{log}{|}{log →−−= XPXYPL8March 2007

Monotonic walk model
• Monotonic walk (univariate)
• A simple and fundamental model.• Monotonic deterioration, never an
improvement• Palmgren-Miner rule - linear damage
accumulation
0)(),()()1( ≥+=+ tvtvtxtx
Gorinevsky, ACC’04; Samar, Gorinevsky, & Boyd, CDC04,05,06
9March 2007

MAP Problem
10March 2007
• Data model
• MAP loss index
• This is a QP problem
( ) ( ) min)1()()()(2 21
2 →−−+−= ∑∑==
T
t
T
ttxtxrtxtyqL
)()()( tetxty +=
})({XP
}){|}({ XYP
)()()1( tvtxtx +=+)exp(~ xrrv ⋅−⋅
),0(~ 1−qNe
0≥v
0)1()( subject to ≥−− txtx

11March 2007
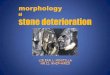
First-order Monotonic Regression
SAMPLE NUMBER
0 20 40 60 80 100 120 140 160 180−2
0
2
4
6
LS SMOOTHING FOR FIRST−ORDER REGRESSION MODEL
SAMPLE NUMBER
0 20 40 60 80 100 120 140 160 180−2
0
2
4
6
FIRST−ORDER MONOTONIC REGRESSION
SAMPLE NUMBER
r = 1r = 10r = 100

Bayesian Model of Image Data
Observation model
– X(t) is an underlying damage map
– Y(t) is a diagnostic image– B is a blur operator
)()(**)( tetXBtY +=
}){|}({ XYP
),0(~)( 1−qNte jk
12March 2007

Markov Random Field Prior
t-1
t n1
n2
Prior model – Damage accumulation
– Spatial continuity (regularization)
)()()1( tVtXtX +=+
})({XP
)exp(~)( xrrtv jk ⋅−⋅0)( ≥tv jk
)()(**)( tWtXRtX +=
),0(~)( ΞNtwjk
13March 2007

3-D MAP Estimation
• MAP Loss Index
∑=
−=T
tF
tXBtYL1
2)(**)(21
min)1()()(**),(21
21
1→−−++ ∑∑
==
T
t
T
ttXtXrtXRtX
)1()( subject to −≥ tXtX
Observation ModelObservation Model
Prior ModelPrior Model
• This is a QP problem (very large)
14March 2007

Tuning of the MRF Model
• Tune the regularization operator R• Steady state solution analysis
min**,** 2 →+− XRXXBYF
**** eXBY +=
( )( ) *
1*
1
e
XXTT
TTe
BRBB
BBRBB−
−
++
+= Signal RecoverySignal Recovery
Noise AmplificationNoise Amplification
15March 2007

Spatial Frequencies
• LSI approximation – True for a large image, away from the
boundaries • 2-D Fourier analysis
( ) ),(~),(OTF 2121 vvXvvbX =B
( ) ),(~),(OTF 2121 vvXvvrX =R
xvvFvvr ⋅= ),(),( 2121 array of FIR array of FIR coefficientscoefficients
(decision vector)(decision vector)16March 2007

Spatial Frequency Domain Design
• Spatial frequency-domain specs
• LP problem for designing a FIR operator R
svrvbvb
vbvb≤−
+1
)()()()()(
*
*
noisegvrvbvb
vb≤
+ )()()()(
*
Signal Recovery Signal Recovery ErrorError
Noise AmplificationNoise Amplification
min→sGorinevsky, Boyd, & Stein, ACC’03, IEEE TAC
17March 2007

Dynamical Loopshaping• Low frequency:
– high loop gain L(ω) ≈ 1/ω
– performance
• High frequency:– small loop gain L(ω)– robustness
• Bandwidth – performance
achieved in a limited frequency band: ω ≤ ωB
0 dB
ωgc
|L(iω)|
ωB
Performance
Robustnessdynamicalbandwidth
dynamical frequency
Difficult problem modern robust control18March 2007

Regularization Operator Design • Spatial loopshaping – noncausal• Solving LP on a spatial frequency grid
19March 2007
0 0.5 1 1.50
0.5
1
MA
GN
ITU
DE
SIGNAL GAIN IN THE ESTIMATOR
0 0.5 1 1.5
0
0.5
1
FREQUENCY = (v12 + v
22)1/2
MA
GN
ITU
DE
NOISE GAIN IN THE ESTIMATOR
MRF operator R

Regularization Operator Design
Noise Noise Amplification Amplification
LPLP--based based design
20March 2007
design
Number of Number of FIR delays FIR delays
FIR FIR operator operator BB
FIR FIR operator operator RR

Optimization Problem
∑=
+−=T
tF
tXRtXtXBtYL1
2 )(**),()(**)(21
min)1()(, →−+ XTXr 1)1()( subject to −≥ tXtX
• Sparse large-scale QP• Very structured• 1-2 millions of variables and constraints• Does not fit into memory with standard
sparse QP solvers21March 2007

Optimizer Software
• Algorithm and software developed by Seung Jean Kim, EE
• Matlab implementation solves the 1M size problem in a few tens of mins on a PC
• Can be yet sped up by a factor of 10
Kim, Koh, Lustig, Boyd, & Gorinevsky, IEEE JSTSP - submitted22March 2007

Optimization Approach• Interior-point method:
– Uses logarithmic barrier functions – Requires 10-50 steps till convergence
• Preconditioned Conjugate Gradient (PCG) method to solve for the step direction
• Iterative approximate solution using PCG– Not exact, but provides a search direction– Requires a good preconditioner (got one)
gX −=∆⋅H
23March 2007

Experimental SHM Data
• Aircraft skin panel
• Acellent SHM system
• Impacts at the same location
• Data collected between the impacts
Impact locationImpact location
24March 2007

SHM Data
25March 2007
After 3 impacts
After 6 impacts
After 9 impacts
20 deg C 40 deg C
After 3 impacts
After 6 impacts
After 9 impacts
20 deg C 40 deg C
• Collected at 20°C and in a thermal chamber at 40°C
• Partial temperature compensation applied

26March 2007
Filtering Results
• Experimental data: 701,784= 171x171x24 pixels
• QP-based trending
• Recovers the 3-D signal

Conclusions
• Practical approach to SHM data trending • Design parameters:
– Blur model B– Noise amplification gain (in design of R)
• Off-line software: LP-based design of R• On-line software: specialized QP solver
Accumulated Sequence of Observed Damage Maps {Y(1), …, Y(N)}
Optimization Problem for Spatio-temporal Filtering and Trending
Specialized Large-scale Sparse QP Solver
Sequence of Deblurred and Denoised Maps {X(1), …, X(N)}
New structure damage
map
27March 2007