-
8/3/2019 Optimal Power Flow Ieee
1/8
IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 17, NO. 2, MAY 2002
229
Optimal Power Flow by Enhanced Genetic AlgorithmAnastasios G.
Bakirtzis , Senior Member, IEEE, Pandel N. Biskas , Student Member,
IEEE,
Christoforos E. Zoumas, Student Member, IEEE, and Vasilios
Petridis, Member, IEEE
AbstractThis paper presents an enhanced genetic algorithm(EGA)
for the solution of the optimal power flow (OPF) withboth
continuous and discrete control variables. The continuouscontrol
variables modeled are unit active power outputs andgenerator-bus
voltage magnitudes, while the discrete ones aretransformer-tap
settings and switchable shunt devices. A numberof functional
operating constraints, such as branch flow limits,load bus voltage
magnitude limits, and generator reactive capa-bilities, are
included as penalties in the GA fitness function (FF).Advanced and
problem-specific operators are introduced in orderto enhance the
algorithms efficiency and accuracy. Numericalresults on two test
systems are presented and compared withresults of other
approaches.
Index TermsGenetic algorithms (GAs), optimal power
flow(OPF).
NOMENCLATURE
Bus voltage angle vector.
Load (PQ) bus voltage magnitude vector.
Unit active power output vector.
Generation (PV) bus voltage magnitude vector.
Transformer tap settings vector.
Bus shunt admittance vector.
System state vector.
System control vector.
A hat above vectors and denotes that the entry corre-
sponding to the slack bus is missing. For simplicity of
notation,
it is assumed that there is only one generating unit connected
on
a bus. This assumption is relaxed in SectionV.
I. INTRODUCTION
SINCE its introduction as network constrained economic
dispatch by Carpentier [1] and its definition as optimal
power flow (OPF) by Dommel and Tinney [2], the OPF
problem has been the subject of intensive research.
The OPF optimizes a power system operating objective func-
tion (such as theoperating cost of thermal resources) while
satis-
fying a set of system operating constraints, including
constraints
dictated by the electric network. OPF has been widely used
inpower system operation and planning [3]. After the
electricity
sector restructuring, OPF has been used to assess the
spatial
variation of electricity prices and as a congestion
management
and pricing tool [4].
In its most general formulation, the OPF is a nonlinear,
nonconvex, large-scale, static optimization problem with
both
Manuscript received October 9, 2000; revised August 20,
2001.Theauthors arewith theDepartment of Electrical
Engineering,Aristotle Uni-
versity of Thessaloniki, Thessaloniki 54006, Greece.Publisher
Item Identifier S 0885-8950(02)03812-9.
continuous and discrete control variables. Even in the
absence
of nonconvex unit operating cost functions, unit prohibited
op-
erating zones, and discrete control variables, the OPF
problem
is nonconvex due to the existence of the nonlinear (AC)
power
flow equality constraints. The presence of discrete control
variables, such as switchable shunt devices, transformer tap
positions, and phase shifters, further complicates the
problem
solution.
The literature on OPF is vast, and [5] presents the major
con-
tributions in this area. Mathematical programming
approaches,
such as nonlinear programming (NLP) [6][9], quadratic
programming (QP) [10], [11], and linear programming (LP)
[12][14], have been used for the solution of the OPF
problem.
Some methods, instead of solving the original problem, solve
the problems KarushKuhnTucker (KKT) optimality con-
ditions. For equality-constrained optimization problems, the
KKT conditions are a set of nonlinear equations, which can
be
solved using a Newton-type algorithm. In Newton OPF [ 15],
the inequality constraints are added as quadratic penalty
terms
to the problem objective, multiplied by appropriate penalty
multipliers. Interior point (IP) methods [16][18], convert
the inequality constraints to equalities by the introduction
of
nonnegative slack variables. A logarithmic barrier function
of the slack variables is then added to the objective
function,
multiplied by a barrier parameter, which is gradually reduced
tozero during the solution process. The unlimited point
algorithm
[19] uses a transformation of the slack and dual variables of
the
inequality constraints which converts the OPF problem KKT
conditions to a set of nonlinear equations, thus avoiding
the
heuristic rules for barrier parameter reduction required by
IP
methods.
OPF programs based on mathematical programming ap-
proaches are used daily to solve very large OPF problems.
However, they are not guaranteed to converge to the global
optimum of the general nonconvex OPF problem, although
there exists some empirical evidence on the uniqueness of
the OPF solution within the domain of interest [20]. To
avoid
the prohibitive computational requirements of
mixed-integerprogramming, discrete control variables are initially
treated
as continuous, and post-processing discretization logic is
subsequently applied [21], [22]. Whereas the effects of dis-
cretization on load tap changing transformers are small and
usually negligible [20], the rounding of switchable shunt
devices may lead to voltage infeasibility, especially when
the
discrete VAR steps are large, and requires special logic
[22].
The handling of nonconvex OPF objective functions, as well
as
the unit prohibited operating zones, also present problems
to
mathematical programming OPF approaches.
0885-8950/02$17.00 2002 IEEE
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/3/2019 Optimal Power Flow Ieee
2/8
230 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 17, NO. 2, MAY
2002
Recent attempts to overcome the limitations of the mathemat-
ical programming approaches include the application of simu-
lated annealing-type methods [23], [24], and genetic
algorithms
(GAs) [25], [26].
In [25], a simple genetic algorithm (SGA) is used for OPF
so-
lution. The control variables modeled are generator active
power
outputs andvoltages, shuntdevices,and transformertaps.
Branch
flow, reactive generation, and voltage magnitude constraints
aretreated as quadratic penalty terms in the GA
fitnessfunction(FF).
TokeeptheGAchromosomesizesmall,onlya4-bitchromosome
area is used for the encoding of each control variable. A
sequen-
tial GA solution scheme is employed to achieve acceptable
con-
trol variable resolution. Test results on the IEEE 30-bus
system,
comprising 25 control variables, are presented.
In [26], a GA is used to solve the optimal power dispatch
problem for a multinode auction market. The GA maximizes the
total participants welfare, subject to network flow and
transport
limitation constraints. The nodal real and reactive power
injec-
tions that clear the market are selected as the problem
control
variables. A GA with two advanced operators, namely, elitism
and hill climbing, is used. A 10-bit chromosome area is
devotedto each control variable. Test results on a 17-node,
34-control
variable system are presented.
The GA-OPF approaches overcome the limitations of
the conventional approaches in the modeling of nonconvex
cost functions, discrete control variables, and prohibited
unit
operating zones. However, they do not scale easily to larger
problems, since the solution deteriorates with the increase
of
the chromosome length, i.e., the number of control
variables.
Thus, the test results in the existing GA-OPF literature are
limited to very small problems.
This paper presents an enhanced genetic algorithm (EGA) for
the solution of the OPF. The control variables and
constraints
included in the OPF and the penalty method treatment of the
functional operating constraints are similar to the ones in
[25]
with the following improvements: switchable shunt devices
and
transformer taps are modeled as discrete control variables.
Vari-
able binary string length is used for different types of
control
variables, so as to achieve the desired resolution for each
type
of control variable, without unnecessarily increasing the size
of
the GA chromosome. In addition to the basic genetic
operators
of the SGA used in [25] and the advanced ones used in [26],
problem-specific operators, inspired by the nature of the
OPF
problem, have been incorporated in our EGA. With the incor-
poration of the problem-specific operators, the GA can solve
larger OPF problems. Test results on systems with up to 242buses
and 500 control variables demonstrate the improvement
achieved with the aid of problem-specific operators.
II. OPTIMAL POWER FLOW PROBLEM FORMULATION
The OPF problem can be formulated as a mathematical opti-
mization problem as follows:
Min (1)
S.t. (2)
(3)
(4)
where
(5)
(6)
The equality constraints (2) are the nonlinear power flow
equations. The inequality constraints (3) are the functional
op-erating constraints, such as
branch flow limits (MVA, MW or A);
load bus voltage magnitude limits;
generator reactive capabilities;
slack bus active power output limits.
Constraints (4) define the feasibility region of the problem
control variables such as
unit active power output limits;
generation bus voltage magnitude limits;
transformer-tap setting limits (discrete values);
bus shunt admittance limits (continuous or discrete
control).
III. GENETIC ALGORITHMS
GAs are general purpose optimization algorithms based on
the mechanics of natural selection and genetics. They
operate
on string structures (chromosomes), typically a concatenated
list
of binary digits representing a coding of the control
parameters
(phenotype) of a given problem. Chromosomes themselves are
composed of genes. The real value of a control parameter,
en-
coded in a gene, is called an allele [27].
GAs are an attractive alternative to other optimization
methods because of their robustness. There are three major
differences between GAs and conventional optimization algo-
rithms. First, GAs operate on the encoded string of the
problem
parameters rather than the actual parameters of the problem.
Each string can be thought of as a chromosome that
completely
describes one candidate solution to the problem. Second, GAs
use a population of points rather than a single point in
their
search. This allows the GA to explore several areas of the
search space simultaneously, reducing the probability of
finding
local optima. Third, GAs do not require any prior knowledge,
space limitations, or special properties of the function to
be
optimized, such as smoothness, convexity, unimodality, or
existence of derivatives. They only require the evaluation
of
the so-called fitness function (FF) to assign a quality value
to
every solution produced.Assuming an initial random population
produced and evalu-ated, genetic evolution takes place by means of
three basic ge-
netic operators:
1) parent selection;
2) crossover;
3) mutation.
Parent selection is a simple procedure whereby two chromo-
somes are selected from the parent population based on their
fit-
ness value. Solutions with high fitness values have a high
prob-
ability of contributing new offspring to the next generation.
The
selection rule used in our approach is a simple
roulette-wheel
selection [27].
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/3/2019 Optimal Power Flow Ieee
3/8
BAKIRTZIS et al.: OPTIMAL POWER FLOW BY ENHANCED GENETIC
ALGORITHM 231
Fig. 1. Simple genetic algorithm (SGA).
Crossover is an extremely important operator for the GA.
It is responsible for the structure recombination
(information
exchange between mating chromosomes) and the conver-
gence speed of the GA and is usually applied with high
probability (0.60.9). The chromosomes of the two parents
selected are combined to form new chromosomes that in-
herit segments of information stored in parent chromosomes.
Until now, many crossover schemes, such as single point,
multipoint, or uniform crossover have been proposed in the
literature. Uniform crossover [28] has been used in our
implementation.
While crossover is the main genetic operator exploiting
theinformation included in the current generation, it does not
pro-
duce new information.
Mutation is the operator responsible for the injection of
new
information. With a small probability, random bits of the
off-
spring chromosomes flip from 0 to 1 and vice versa and give
new characteristics that do not exist in the parent
population
[27]. In our approach, the mutation operator is applied with
a
relatively small probability (0.0001-0.001) to every bit of
the
chromosome.
The FF evaluation and genetic evolution take part in an
iter-
ative procedure, which ends when a maximum number of gen-
erations is reached, as shown in Fig. 1.When applying GAs to
solve a particular optimization
problem (OPF in our case), two main issues must be
addressed:
1) the encoding, i.e., how the problem physical decision
variables are translated to a GA chromosome and its
inverse operator, decoding;
2) the definition of the FF to be maximized by the GA
(the GA FF is formed by an appropriate transformation
of the initial problem objective function augmented by
penalty terms that penalize the violation of the problem
constraints [29]).
Fig. 2. GA chromosome structure.
IV. GENETIC ALGORITHM SOLUTION TO
OPTIMAL POWER FLOW
A. Encoding
The chromosome is formed as shown in Fig. 2. There are
four chromosome regions (one for each set of control vari-
ables), namely, 1) ; 2) ; 3) ; and 4) . Encoding is
performed using different gene-lengths for each set of
control
variables, depending on the desired accuracy. The decoding
of
a chromosome to the problem physical variables is performed
as follows:
1) continuous controls taking values in the interval
(7)
2) discrete controls taking values
with
and
(8)
where is the decimal number to which the binary
number in a gene is decoded and is the gene length
(number of bits) used for encoding control variable .
B. Fitness Function (FF)
GAs are usually designed so as to maximize the FF, which
is a measure of the quality of each candidate solution. The
ob-
jective of the OPF problem is to minimize the total
operating
cost (1).
Therefore, a transformation is needed to convert the cost
objective of the OPF problem to an appropriate FF to be max-
imized by the GA. The OPF functional operating constraints
(3) are included in the GA solution by augmenting the GA
FF by appropriate penalty terms for each violated functional
constraint. Constraints on the control variables (4) are au-
tomatically satisfied by the selected GA encoding/decoding
scheme (7) and (8).
Therefore, the GA FF is formed as follows:
(9)
(10)
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/3/2019 Optimal Power Flow Ieee
4/8
232 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 17, NO. 2, MAY
2002
where
fitness function;
constant;
fuel cost function of unit (in our case, a quadratic
function);
weighting factor of functional operating constraint
;
penalty function for functional operating constraint
;
violation of th functional operating constraint, if
positive;
Heaviside (step) function;
number of units;
number of functional operating constraints.
Given a candidate solution to the problem, represented by a
chromosome, the FF is computed as follows.
Step 1) Decode the chromosome to determine the actual
control variables, , using (7) and (8). The com-
puted control vector satisfies, by design, constraints(4).
Step 2) Solve the power flow (2) to compute the state
vector,
.
Step 3) Determine the violated functional constraints (3)
and
compute associated penalty functions (10).
Step 4) Compute the FF using (9).
In Step 2, a simple fast decoupled load flow (FDLF) [30]
is used with no PV-PQ bus-type switching, since generator
re-
active capabilities are incorporated in the functional
operating
constraints and no local control adjustments, such as tap
and
switchable shunts [31], since the settings of these controls
are
determined by the GA. Therefore, only a few load flow itera-
tions are required for convergence. The FDLF and ma-trices
areformed and factorized only once in the beginningthe
effect of the changes of shunt admittances on the matrix is
neglected. In case that, due to the random (yet within
limits)
initial selection of the control variables, the load flow does
not
converge within a predefined number of iterations (set to
8),
large penalty terms, proportional to the maximum
active/reac-
tive power mismatch, are added to the FF.
C. Advanced and Problem-Specific Genetic Operators
One of the most important issues in the genetic evolution
is the effective rearrangement of the genotype information.
In
the SGA crossover is the main genetic operator responsiblefor
the exploitation of information while mutation brings new
nonexistent bit structures. It is widely recognized that the
SGA scheme is capable of locating the neighborhood of the
optimal or near-optimal solutions, but, in general, requires
a large number of generations to converge. This problem
becomes more intense for large-scale optimization problems
with difficult search spaces and lengthy chromosomes, where
the possibility for the SGA to get trapped in local optima
increases and the convergence speed of the SGA decreases.
At this point, a suitable combination of the basic,
advanced,
and problem-specific genetic operators must be introduced
in order to enhance the performance of the GA. Advanced
Fig. 3. Gene swap operator.
and problem-specific genetic operators usually combine
localsearch techniques and expertise derived from the nature of
the
problem.
A set of advanced and problem-specific genetic operators has
been added to the SGA in order to increase its convergence
speed and improve the quality of solutions. Our interest was
focused on constructing simple yet powerful enhanced genetic
operators that effectively explore the problem search space.
The
advanced features included in our GA implementation are as
follows.
1) Fitness Scaling: In order to avoid early domination of
ex-
traordinary strings and to encourage a healthy competi-
tion among equals, a scaling of the fitness of the pop-
ulation is necessary [27]. In our approach, the fitness isscaled
by a linear transformation.
2) Elitism: Elitism ensures that the best solution found
thus
far is never lost when moving from one generation to an-
other. The best solution of each generation replaces a ran-
domly selected chromosome in the new generation [32].
3) Hill Climbing: In order to increase the GA search speed
at
smooth areas of the search space a hill-climbing operator
is introduced, which perturbs a randomly selected control
variable. The modified chromosome is accepted if thereis an
increase in FF value; otherwise, the old chromosome
remains unchanged. This operator is applied only to the
best chromosome (elite) of every generation [26], [29].
In addition to the above advanced features, which are called
advanced despite their wide use in most recent GA implemen-
tations to distinguish between the SGA and our EGA,
operators
specific to the OPF problem have been added.
All problem-specific operators introduce random modifica-
tion to all chromosomes of a new generation. If the modified
chromosome proves to have better fitness, it replaces the
orig-
inal one in the new population. Otherwise, the original
chro-
mosome is retained in the new population. All
problem-specific
operators are applied with a probability of 0.2. The
following
problem-specific operators have been used.
1) Gene Swap Operator (GSO): This operator randomly se-
lects two genes in a chromosome and swaps their values,as shown
in Fig. 3. This operator swaps the active power
output of two units, the voltage magnitude of two genera-
tion buses, etc. Swapping among different types of control
variables is not allowed.
2) Gene Cross-Swap Operator (GCSO): The GCSO is a
variant of the GSO. It randomly selects two different
chromosomes from the population and two genes, one
from every selected chromosome, and swaps their values,
as shown in Fig. 4. While crossover exchanges informa-
tion between high-fit chromosomes, the GCSO searches
for alternative alleles, exploiting information stored even
in low-fit strings.
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/3/2019 Optimal Power Flow Ieee
5/8
BAKIRTZIS et al.: OPTIMAL POWER FLOW BY ENHANCED GENETIC
ALGORITHM 233
Fig. 4. Gene cross-swap operator.
Fig. 5. Gene copy operator.
Fig. 6. Gene inverse operator.
Fig. 7. Gene max-min operator.
3) Gene Copy Operator (GCO): This operator randomly se-
lects one gene in a chromosome and with equal proba-
bility copies its value to the predecessor or the successor
gene of the same control type, as shown in Fig. 5. This op-
erator has been introduced in order to force consecutive
controls (e.g., identical units on the same bus) to operate
at the same output level.
4) Gene Inverse Operator (GIO): This operator acts like a
sophisticated mutation operator. It randomly selects one
gene in a chromosome and inverses its bit-values from
one to zero and vice versa, as shown in Fig. 6. The GIO
searches for bit-structures of improved performance, ex-
ploits new areas of the search space far away from the cur-
rent solution, and retains the diversity of the population.
5) Gene Max-Min Operator (GMMO): The GMMO tries to
identify binding control variable upper/lower limit con-
straints. It selects a random gene in a chromosome and,
with the same probability (0.5), fills its area with 1 s or
0 s, as shown in Fig. 7.
D. Enhanced Genetic Algorithm (EGA)
In the EGA, shown in Fig. 8, after the application of the
basic
genetic operators (parent selection, crossover, and mutation)
the
Fig. 8. Enhanced genetic algorithm (EGA).
advanced and problem-specific operators are applied to
producethe new generation.
All chromosomes in the initial population are created at
random (every bit in the chromosome has equal probability
of being switched ON or OFF). Due to the decoding process
selected [(7) and (8)], the corresponding control variables of
the
initial population satisfy their upperlower bound or
discrete
value constraints (4). However, the initial population
candidate
solutions may not satisfy the functional operating
constraints
(3) or even the load flow constraints (2) since the random,
within limits, selection of the control variables may lead to
load
flow divergence (as already discussed in Section I V-B).
Population statistics computed for the new generation
include
maximum, minimum, and average fitness values and the
90%percentile.
Population statistics are then used to adaptively change the
crossover and mutation probabilities [33]. If premature
conver-
gence is detected the mutation probability is increased and
the
crossover probability is decreased. The contrary happens in
the
case of high population diversity.
V. TEST RESULTS
In this section, the proposed EGA solution of the OPF is
eval-
uated using two test systems: 1) the IEEE 30-bus system [6]
and
2) the 3-area IEEE RTS96 [34]. The test examples have been
run on a 1.4-GHz Pentium-IV PC. Twenty runs have been per-
formed for each case examined. The results which follow are
the best solution over these 20 runs.
A. IEEE 30-Bus System
The first test system is the IEEE 30-bus, 41-branch system
[6]. It has a total of 24 control variables as follows: five
unit ac-
tive power outputs, six generator-bus voltage magnitudes,
four
transformer-tap settings, and nine bus shunt admittances.
The gene length for unit power outputs is 12 bits and for
gen-
erator voltage magnitudes is 8 bits. They are both treated as
con-
tinuous controls. The transformer-tap settings can take 17
dis-
crete values (each one is encoded using 5 bits): the lower
and
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/3/2019 Optimal Power Flow Ieee
6/8
234 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 17, NO. 2, MAY
2002
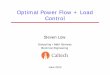
Fig. 9. FF comparison for IEEE 30-bus system.
upper limits are 0.9 p.u. and 1.1 p.u., respectively, and the
step
size is 0.0125 p.u. The bus shunt admittances can take six
dis-
crete values (each one is encoded using 3 bits): the lower
and
upper limits are 0.0 p.u. and 0.05 p.u., respectively, and the
step
is 0.01 p.u. (on system MVA basis). The GA population size
is
taken equal to 80, the maximum number of generations is 200,and
crossover and mutation are applied with initial probability
0.9 and 0.001, respectively.
Two sets of 20 test runs were performed; the first (SGA)
with
only the basic GA operatorsand the second (EGA) with all
oper-
ators, including advanced and problem-specific operators.
The
FF evolution of the best of these runs is shown in Fig. 9.
The
best and worst solutions of the second set of 20 runs (EGA)
are shown in Table I. The operating costs of the best and
worst
solutions are 802.06 $/h and 802.14 $/h, respectively,
(0.01%
difference). The differences between the values of the
control
variables in the best and worst solutions are not significant.
The
operating cost of all EGA-OPF solutions is slightly less than
the
802.4 $/h figure reported in [6]. As shown in Table I, there is
a
slight difference in unit marginal costs (UMCs), attributed
to
network losses. Note that, in this case, the UMCs coincide
with
the nodal prices, since no unit limits are reached.
Fig. 9 demonstrates the improvement achieved with the inclu-
sion of the advanced and problem-specific operators. The SGA
run took 18 s, while the EGA took 76 s to evaluate 200 gen-
erations. However, the EGA provides a far better solution
than
SGA even in the first 25 generations, or 10 s.
B. IEEE 3-Area RTS96
The 3-area IEEE RTS-96 [34] is a 73-bus, 120-branch system.
It consists of three areas connected through five tie lines.
Thearea-A unit cost data are derived from the heat rate data
pro-
vided in [34] and the fuel cost data listed in Table II. The
value
of water is zero, assuming excessive inflows. Area-B and
area-C
fuel costs are selected three times the area-A fuel costs, to
im-
pose exports from area A to areas B and C. A contingency
case
with tie lines 107203 and 123217 out of service, under 90%
peak load conditions, is studied. To impose congestion, the
rat-
ings of tie lines 113215 and 121325 are reduced by 50% (to
250 MVA).
This system has a total of 150 control variables as follows:
98 unit active power outputs, 33 generator-bus voltage
magni-
tudes, 16 transformer tap-settings, and 3 bus shunt
admittances.
TABLE IIEEE 30-BUS SYSTEM RESULTS
TABLE IIFUEL COSTS FOR IEEE 3-AREA RTS-96
The lower and upper limits of voltage magnitude of all buses
are
0.95 p.u. and 1.05 p.u., respectively, (except for PV buses
where
p.u.). Transformer taps take discrete values within
0.9 p.u. and 1.1 p.u. with a step size of 0.0125 p.u (17
discretevalues). Similarly, bus shunt admittances take discrete
values
between 150 MVAR (inductor, at rated voltage) and 0 MVAR
with a 50 MVAR step (four discrete values). The GA popula-
tion size is taken equal to 180, the maximum number of
genera-
tions is 600, and crossover and mutation are applied with
initial
probability 0.9 and 0.001, respectively. It was necessary to
in-
crease both the population size and the maximum number of
generations to solve the larger problem. It was also necessary
to
increase the probability of application of problem-specific
op-
erators from 0.2 to 0.5.
First, the unconstrained schedule is obtained by ignoring
branch flow limits. Branch flow limits are ignored by
selecting
the corresponding penalty weight to zero in (9). The
uncon-strained schedule results in an 81.8 MVA overloading of tie
line
121325. The corresponding operating cost is 255 281.5 $/h.
Next, the constrained schedule is calculated by activating
the
branch flow constraints. Tie line 121325 flow is now reduced
to 249.97 MVA (almost to the 250 MVA line rating). The
operating cost is increased to 256 189.4 $/h due to
congestion.
The FF evolution of both the SGA and the EGA, shown in
Fig. 10, demonstrates the improvement achieved with the
inclu-
sion of the advanced and the problem-specific operators. The
SGA run took 266 s, while the EGA took 1643 s to evaluate
600
generations. However, as shown in Fig. 10, a far better
solution
is provided by EGA during the same execution time as SGA.
http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-http://-/?-
-
8/3/2019 Optimal Power Flow Ieee
7/8
BAKIRTZIS et al.: OPTIMAL POWER FLOW BY ENHANCED GENETIC
ALGORITHM 235
Fig. 10. FF comparison for IEEE 3-area RTS96.
VI. COMPUTATIONAL REQUIREMENTS OF GENETIC
ALGORITHM OPTIMAL POWER FLOW
In an SGA, if a population of size PS is allowed to evolve
for a total number of NG generations, the product PG NG
determines the required number of FF evaluations (NFE) and
hence the GA computational requirements. When problem-spe-
cific operators are used, the required number of fitness
evalua-
tions increases accordingly. In GA-OPF, the FF evaluation is
synonymous with power flow solution in terms of computa-
tional requirements, since the latter is the computationally
dom-
inant task in the FF evaluation procedure (see Section
IV-B).
It is widely recognized among GA practitioners that the re-
quired NFE for a particular GA implementation depends on
problem difficulty, which, in turn, depends on two factors:
1)
the chromosome length and 2) the shape and characteristics
of
the fitness landscape. Problems with smooth fitness
landscapes
are easy to solve with GA. If the global optimum is located
at
the bottom of a steep gorge of the fitness landscape, the GA
mayrequire a large number of fitness evaluations to locate it.
Thus,
two optimization problems with the same chromosome length
may require vastly different NFE to solve owing to the
differ-
ence in their fitness landscapes.
In GA-OPF, the chromosome length is determined by the
number of control variables and the resolution required for
each
control type. The number of buses affects the fitness
evalua-
tion ( power flow solution) time. The fitness landscape of
the
GA-OPF is very hard to visualize, except for trivial
problems
employing at most two-decision variables.
For the assessment of the GA-OPF computational require-
ments, an experiment is designed as follows. Four test
systems
of increasing size are created, based on the IEEE RTS96 [34](1-,
3-, 5-, and 10-area configurations). The GA population size
is 200, the probability of application of problem-specific
opera-
tors is 0.5, and the maximum number of generations is 600 in
all
four cases. Table III summarizes the results of 20 test runs in
all
test systems. The last four columns report the average (over
the
20 runs) computational requirements of the GA. The number
of generations (NG) to arrive at a good quality OPF solution
is reported in the 7th row. A good quality OPF solution is
one
with fitness value within 0.1% of the fitness obtained after
al-
lowing the GA to evolve for 600 generations (well within the
flat portion of Fig. 10). The execution time to arrive at a
good
quality solution is reported in the9th row. Theresults of Table
III
TABLE IIICOMPUTATIONAL REQUIREMENTS
show that thedifference of the best and worst solutions
increases
slightly and the execution time increases considerably as
the
system size increases.
VII. CONCLUSIONS
A GA solution to the OPF problem has been presented and
applied to small and medium size power systems. The main
ad-vantage of the GA solution to the OPF problem is its
modeling
flexibility: nonconvex unit cost functions, prohibited unit
oper-
ating zones, discrete control variables, and complex,
nonlinear
constraints can be easily modeled. Another advantage is that
it
can be easily coded to work on parallel computers.
The main disadvantage of GAs is that they are stochastic
algorithms and the solution they provide to the OPF problem
is not guaranteed to be the optimum. Another disadvantage is
that the execution time and the quality of the provided
solu-
tion deteriorate with the increase of the chromosome length,
i.e.,
the OPF problem size. The applicability of the GA solution
to
large-scale OPF problems of systems with several thousands
of
nodes, utilizing the strength of parallel computers, has yet to
be
demonstrated.
REFERENCES
[1] J. Carpentier, Contibution a.letude du
dispatchingeconomique,Bull.Soc. Francaise Elect., vol. 3, pp.
431447, Aug. 1962.
[2] H. W. Dommel and W. F. Tinney, Optimal power flow
solutions,IEEETrans. Power Apparat. Syst., vol. PAS-87, pp.
18661876, Oct. 1968.
[3] J. A. Momoh, R. J. Koessler, M. S. Bond, B. Stott, D. Sun,
A. Papalex-opoulos, and P. Ristanovic, Challenges to optimal power
flow, IEEETrans. Power Syst., vol. 12, pp. 444455, Feb. 1997.
[4] R. D. Christie, B. F. Wollenberg, and I. Wangensteen,
Transmissionmanagement in the deregulated environment, Proc. IEEE,
vol. 88, pp.170195, Feb. 2000.
[5] J. A. Momoh, M. E. El-Hawary, and R. Adapa, A review of
selectedoptimal power flow literature to 1993, IEEE Trans. Power
Syst., pt. Iand II, vol. 14, pp. 96111, Feb. 1999.
[6] O. Alsac and B. Stott, Optimal load flow with steady state
security,IEEE Trans. Power Apparat. Syst., vol. PAS-93, pp. 745751,
May/June1974.
[7] R. R. Shoults and D. T. Sun, Optimal power flow based on
P-Qdecomposition, IEEE Trans. Power Apparat. Syst., vol. PAS-101,
pp.397405, Feb. 1982.
[8] M. H. Bottero, F. D. Galiana, and A. R. Fahmideh-Vojdani,
Economicdispatch using the reduced Hessian, IEEE Trans. Power
Apparat. Syst.,vol. PAS-101, pp. 36793688, Oct. 1982.
[9] J. A. Momoh, A generalized quadratic-based model for optimal
powerflow, IEEE Trans. Syst., Man, Cybern., vol. SMC-16, 1986.
[10] G. F. Reid and L. Hasdorf,Economic dispatch usingquadratic
program-ming, IEEE Trans. Power Apparat. Syst., vol. PAS-92, pp.
20152023,1973.
http://-/?-http://-/?-
-
8/3/2019 Optimal Power Flow Ieee
8/8
236 IEEE TRANSACTIONS ON POWER SYSTEMS, VOL. 17, NO. 2, MAY
2002
[11] R. C. Burchett, H. H. Happ, and K. A. Wirgau, Large-scale
optimalpower flow, IEEE Trans. Power Apparat. Syst., vol. PAS-101,
pp.37223732, Oct. 1982.
[12] B.Stott andE. Hobson, Powersystem security control
calculation usinglinear programming,IEEETrans. PowerApparat. Syst.,
pt. I and II, vol.PAS-97, pp. 17131731, Sept./Oct. 1978.
[13] B. Stott and J. L. Marinho, Linear programming for power
systemnetwork security applications, IEEE Trans. Power Apparat.
Syst., vol.PAS-98, pp. 837848, May/June 1979.
[14] R. Mota-Palomino and V. H. Quintana, A penalty
function-linear pro-gramming method for solving power system
constrained economic op-eration problems, IEEE Trans. Power
Apparat. Syst., vol. PAS-103, pp.14141442, June 1984.
[15] D. I. Sun, B. Ashley, B. Brewer, A. Hughes, and W. F.
Tinney, Optimalpower flow by Newton approach, IEEE Trans. Power
Apparat. Syst.,vol. PAS-103, pp. 28642880, 1984.
[16] H. Wei, H. Sasaki, J. Kubokawa, and R. Yokoyama, An
interior pointnonlinear programming for optimal power flow problems
with a noveldata structure, IEEE Trans. Power Syst., vol. 13, pp.
870877, Aug.1998.
[17] G.L. Torres andV. H. Quintana,An interior-point method for
nonlinearoptimal power flow using voltage
rectangularcoordinates,IEEE Trans.Power Syst., vol. 13, pp.
12111218, Nov. 1998.
[18] J. A. Momoh and J. Z. Zhu, Improved interior point method
for OPFproblems,IEEETrans. PowerSyst., vol. 14,pp.11141120, Aug.
1999.
[19] G. Tognola and R. Bacher, Unlimited point algorithm for OPF
prob-
lems, IEEE Trans. Power Syst., vol. 14, pp. 10461054, Aug.
1999.[20] A. D. Papalexopoulos, C. F. Imparato, and F. F. Wu,
Large-scale op-timal power flow: Effects of initialization
decoupling and discretiza-tion, IEEE Trans. Power Syst., vol. 4,
pp. 748759, May 1989.
[21] W. F. Tinney, J. M. Bright, K. D. Demaree, and B. A.
Hughes, Somedeficiencies in optimal power flow,IEEE Trans.Power
Syst. , vol. 3, pp.676683, May 1988.
[22] E. Liu, A. D. Papalexopoulos,and W. F. Tinney, Discrete
shunt controlsin a Newton optimal power flow, IEEE Trans. Power
Syst., vol. 7, pp.15191528, Nov. 1999.
[23] L. Chen,H. Suzuki, and K. Katou, Mean field theory for
optimal powerflow, IEEE Trans. Power Syst., vol. 12, pp. 14811486,
Nov. 1997.
[24] L. Chen, S. Matoba, H. Inabe, and T. Okabe, Surrogate
constraintmethod for optimal power flow, IEEE Trans. Power Syst.,
vol. 13, pp.10841089, Aug. 1998.
[25] L. L. Lai, J. T. Ma, R. Yokoyama, and M. Zhao, Improved
genetic al-gorithms for optimal power flow under both normal and
contingent op-
eration states, Elec. Power Energy Syst., vol. 19, no. 5, pp.
287292,1997.[26] T. Numnonda and U. D. Annakkage, Optimal power
dispatch in
multinode electricity market using genetic algorithm, Elec.
PowerSyst. Res., vol. 49, pp. 211220, 1999.
[27] D. E. Goldberg, Genetic Algorithms in Search, Optimization
and Ma-chine Learning, Reading. Reading, MA: Addison-Wesley,
1989.
[28] L. J. Eshelman, R. A. Caruana, and J. D. Schaffer, Biases
in thecrossover landscape, in Proc. 3rd Int. Conf. Genetic
Algorithms, 1989,pp. 1019.
[29] V. Petridis, S. Kazarlis, and A. Bakirtzis, Varying fitness
functions ingenetic algorithm constrained optimization: The cutting
stock and unitcommitment problems, IEEE Trans. Syst., Man, Cybern.
B, vol. 28, pp.629640, Oct. 1998.
[30] B. Stott and O. Alsac, Fast decoupled load flow, IEEE
Trans. PowerApparat. Syst., vol. PAS-93, pp. 859869, May/June
1974.
[31] S. K. Chang and V. Brandwajn, Adjusted solutions in fast
decoupledload flow, IEEE Trans. Power Syst., vol. 3, pp. 726733,
May 1988.
[32] L. Davis, Handbook of Genetic Algorithms. New York: Van
Nostrand,1991.
[33] , Adapting operator probabilities in genetic algorithms, in
Proc.3rd Int. Conf. Genetic Algorithms Applications, J. Schaffer,
Ed., SanMateo, CA, June 1989, pp. 6169.
[34] The IEEE reliability test system-1996, IEEE Trans. Power
Syst., vol.14, pp. 10101020, Aug. 1999.
Anastasios G. Bakirtzis (S77M79SM95) received the Dipl. Mech.
&Electr. Eng. degree from the National Technical University of
Athens, Athens,Greece, in 1979, and the M.S.E.E. and Ph.D. degrees
from Georgia Institute ofTechnology, Atlanta, in 1981 and 1984,
respectively.
In 1984, he was a consultant to Southern Company, Atlanta, GA.
Since 1986,he has been with the Department of Electrical
Engineering, Aristotle Univer-sity of Thessaloniki, Thessaloniki,
Greece, where he is currently an AssociateProfessor. His research
interests are in power system operation and control, re-liability
analysis, and alternative energy sources.
Pandel N. Biskas (S01) received the Dipl. Electr. Eng. degree
from the Aris-totle Universityof Thessaloniki, Thessaloniki,
Greece, in 1999, where he is cur-rently pursuing the Ph.D. degree.
His research interests are in power system op-eration and control
and transmission pricing.
Christoforos E. Zoumas (S98) received the Dipl. Electr. Eng.
degree fromthe Aristotle University of Thessaloniki, Thessaloniki,
Greece, in 1996, wherehe is currently pursuing the Ph.D. degree.
His research interest is in computerapplications in power
systems.
Vasilios Petridis (M77) received the B.S. degree in electrical
engineering fromthe National Technical University, Athens, Greece,
in 1969, and the M.Sc. and
Ph.D. degrees in electronics and systems from Kings College,
University ofLondon, London, U.K., in 1970 and 1974,
respectively.Hehas been Consultant ofthe Naval Research Centre,
Greece,andDirector of
the Department of Electronics and Computer Engineering and
Vice-Chairmanof the Faculty of Electrical and Computer Engineering
at Aristotle University,Thessaloniki, Greece. He is currently
Professorin the Departmentof Electronicsand Computer Engineering in
the Aristotle University of Thessaloniki, Thessa-loniki, Greece. He
is coauthor of the monograph Predictive Modular Neural
Networks: Application to Time Series (Norwell, MA: Kluwer,
1998). He is alsoauthor of four books on control and measurement
systems and approximately110 research papers. His research
interests include control systems, machinelearning, intelligent and
autonomous systems, artificial neural networks, evo-lutionary
algorithms, fuzzy systems, modeling and identification, robotics,
andindustrial automation.



























![Chance-constrained AC OPF with probabilistic guarantees ...events.pnnl.gov/pdfs/ccsi/session5/talk12.pdf · optimal power flow,” in IEEE PowerTechConference, 2013] • SDP formulation,](https://img.pdfslide.net/doc/110x75/5f1d4273d7168c75a16108f6/chance-constrained-ac-opf-with-probabilistic-guarantees-optimal-power-flowa.jpg)