Embed Size (px)
Citation preview

Optimal Refueling Strategies for a Mixed-Vehicle Fleet
Abraham Mehrez and Helman I. Stern Department of Industrial Engineering and Management, Ben-Gurion Universiry of
the Negev, Beer-Sheva, Israel
The problem treated here involves a mixed fleet of vehicles comprising two types of vehicles: K , tanker-type vehicles capable of refueling themselves and other vehicles, and Kz nontanker vehicles incapable of refueling. The two groups of vehicles have different fuel capacities as well as different fuel consumption rates. The problem is to find the tanker refueling sequence that maximizes the range attainable for the Kz nontankers. A tanker refueling sequence is a partition of the tankers into rn subsets (2 5 rn 5 K , ) . A given sequence of the partition provides a realization of the number of tankers participating in each successive refueling operation. The problem is first formulated as a nonlinear mixed-integer program and reduced to a linear program for a fixed sequence which may be solved by a simple recursive procedure. It is proven that a “unit refueling sequence” composed of one tanker refueling at each of K, refueling operations is optimal. In addition, the problem of designing the “minimum fleet” (minimum number of tankers) required for a given set of Kz nontankers to attain maximal range is resolved. Also studied are extensions to the problem with a constraint on the number of refueling operations, different nontanker recovery base geometry, and refueling on the return trip.
1. INTRODUCTION
This article is a continuation of previous work reported in [ l ] on the problem of determining refueling strategies that maximize the operational range of a fleet of vehicles. In [l] it is assumed that such a vehicle may transfer and receive fuel from any other vehicle in the fleet. A fleet of vehicles departs from a common origin with no sources of fuel other than that canied by the vehicles themselves.
The aim is to find the “maximal reach” of the fleet such that each vehicle has enough fuel to return to the origin unassisted. In [l] the focus was on finding the maximal distance traveled by any single vehicle in a fleet of size n. This distance was called the maximal operational range of the fleet. Such a system is said to be a “1- out-of-n” system. Two refueling strategies were examined:
(1) a sequential refueling chain in which the last vehicle that has received fuel is the next vehicle to transfer fuel, and
(2) a multiple-transfer refueling chain in which each vehicle transfers fuel to each of the remaining vehicles in equal proportions.
In both strategies each vehicle transfers fuel only once, after which it returns to the origin. A chain for either strategy is characterized by a sequence of refueling operations. An assignment of a vehicle to a unique position in the chain provides an ordered sequence which has meaning only when the vehicles are nonidentical, i.e., each described by its own capacity and fuel consumption rate.
Naval Research Logistics Quarterly. Vol. 32, pp. 315-328 (1985) Copyright 6 1985 by John Wiley & Sons, Inc. CCC 0028- 1441 / 85/0203 15- 14$04.00

316 Naval Research Logistics Quarterly, Vol. 32 (1985)
No work has been done, to the authors knowledge, on a “K-out-of-n” system. In such a system a fixed number of K vehicles ( K < n) must simultaneously reach their maximal distances before returning to the origin. A version of this class of problem that is of particular importance is treated here. The problem involves a mixed fleet comprising two types of vehicles: K 1 tanker-type vehicles capable of refueling them- selves and other vehicles, and K 2 nontanker vehicles incapable of refueling. The two types of vehicles naturally have different fuel capacities as well as different fuel consumption rates.
The problem may be posed as follows: Given a fleet of size n comprised of K , tankers and K , nontankers, find the maximum range attainable for the K , nontankers (small aircraft) such that all vehicles return to the origin point without refueling on the return trip. It is assumed that only the tankers are capable of transferring fuel to both other tankers and nontankers. As all the tankers are identical it is immaterial which particular tanker is assigned to a position in a refueling chain. Only the number of tankers assigned to each position in the chain is of importance.
Let a refueling sequence contain rn - 1 ordered refueling operations (1 I m - 1 I K , ) . Thus, we shall search over the solution space of refueling se- quences of the form [ K i , G , . . . , K { , . . . , K ? - ’ ] , where K{ represents the number of tankers giving fuel to other vehicles during the jth refueling operation (j I K l ) . After transferring fuel the K{ tankers return to the origin. Any feasible sequence requires that the numbers in the sequence sum to the number of tankers.
In Section 2 the problem of maximizing operational range over the set of all feasible sequences is formulated as a nonlinear mixed-integer mathematical programming prob- lem. In Section 3 it is shown that when the sequence is fixed the problem is reduced to a linear programming problem which may be solved by a simple recursive procedure. Section 4 investigates the properties of a “unit sequence” composed of a single tanker transferring fuel at each of K I transfer operations. In Section 5 it is shown that the “unit sequence” is in fact optimal. The result is specialized for an identical fleet corroborating the finding in [ 1 1 .
The maximum possible range of any nontanker is bounded above by its one-way (unrefueled) distance, say r2. Section 6 resolves the problem of designing the “min- imum fleet,” i.e., the minimum number of tankers required for a given fixed set of K 2 nontankers to attain their maximal possible range. The practical case in which limits are placed on the number of refueling operations is studied in Section 7. Sections 8 and 9 treat two extensions to the basic mixed-vehicle fleet problem: allowing recovery of nontankers at a base other than the origin, and allowing refueling of nontankers on their return trip, respectively. Section 10 concludes the article.
2. MODEL FORMULATION
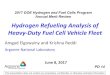
Figure 1 provides an illustration of the geometry of a refueling sequence comprised of m - 1 refueling operations and m distance segments. The jth refueling operation occurs at a distance DiZl R’ from the origin, after which the K{ tankers giving fuel discontinue their forward flight and return to the origin. The distance traveled between the (j - 1)st and thejth refueling operation is denoted by RJ, over which the remaining fleet of K I - DiZ1l K ; tankers and K 2 nontankers continue advancing from the origin. It should be noted that during the jth refueling opration the K{ tankers transfer fuel to

Mehrez and Stem: Optimal Refueling Strategies 317
Origin 1 2 3 j -1 I I . . . . .
Tankers K , =
. .
small A/C K2
Figure 1. Sketch of the refueling operation geometry for a given refueling sequence
each of the remaining vehicles. It is assumed that this transfer takes place instanta- neously-an assumption valid for long distances only. A list of notation used in the mathematical formulation of the problem is given below.
number of tankers number of small AIC (aircraft); assume K, < K z fuel capacity of tanker (small A X ) in, say, liters; assume d , >> d2 fuel consumption of tanker (small A X ) in, say, literdkilometer; assume q , > q2 number of refueling operations (1 5 m - 1 5 K,) . distance between the (j - 1)st and the jth refueling operation; Let Ro = 0 and j = 1, . . . ,112.
Bvc0 R" = total distance from the origin at which the jth refueling operation takes place number of tankers giving fuel at the jth refueling ,operation; let KY = 0 , j = 1 , . . . ,m dllql(d21q2) = the maximum one-way distance of the tanker (small AX) , where r l > r2 one-way reach ratio of a tanker over small AIC
Mathematical Programming Formulation
Let &m) = [Kt,K:, . . . ,&, . . . , & - I ] represent the sequence that yields the maximal range Z(rn) . It is desired to find K(m) over all 2 5 m 5 K , + 1 that max- imizes Z(m). For a given m the problem may be posed as problem Pl(m).
PROBLEM Pl(m): m
maximize C RJ = Z(m) , I = I

318 Naval Research Logistics Quarterly, Vol. 32 (1985)
subject to: Fuel transfer balance equations.
[dl - (g, R” + 2 R J ) q l ] K {
= [ ( K l - K:)q , + K 2 q 2 ] R J ,
j = 1, . . . , M - 1 (1)
One-way nontanker range limit.
j - I
Ri + 2 R” 5 d21q2, j = 1, . . . ,m - 1 (2) v = o
Nontanker return constraint.
(2Rm + 5’ Rv)q2 5 d2, ” = O
m - 1
K’; = K ,
Variables.
K{ B 0 integer j = 1,2, . . . ,m - 1, RJ 2 0 Ro = 0
j = 0, . . . ,m, j = 1 , . . . ,m.
(3)
(4)
( 5 )
Constraint (1) indicates that at the range at which the jth fuel transfer operation occurs the excess fuel of the KJ tankers transferring fuel is exactly equal to the spare capacity of all the receiving vehicles (K2 nontankers + K I - Wv=, & tankers). This range is said to be the “balance point.” The left-hand side of this constraint reflects the requirement that the vehicles transferring fuel have enough fuel for the return trip to the origin. The right-hand side represents the sum of (i) fuel consumed by the receiving tankers during travel from the (j - 1)st refueling point (where they were last full) to the current refueling point j plus (ii) the amount of fuel consumed by the nontankers over the distance R’.
Constraint (2) insures that the distance between refueling points does not exceed the maximum one-way distance the nontankers can travel.
Constraint (3) insures that each nontanker has enough fuel to proceed from the last refueling point to its maximal distance and return to the base. At distance Z(m - 1) the nontanker is filled to capacity, so that only the distance R” need be traversed twice.
Constraint (4) reflects the condition that each tanker gives fuel in exactly one refueling operation. The number of tankers selected for operation j is reflected by the decision variable KJ, which can take on only integer values. The RJ are nonnegative refueling distance variables. Verification that the balance point [used in constraint (l)] is necessary for any optimal solution is shown below.

Mehrez and Stem: Optimal Refueling Strategies 319
THEOREM I (balance point): For any given refueling sequence S, their exists a set of optimal refueling points, Z ( j ) 0’ = 1, . . . ,m - 1). The j t h such point is determined by the balance point constraint ( I ) , i.e., the surplus fuel S[Zg’ ) ] of the transferring tankers equals the empty capacity C [ Z ( j ) ] of the remaining fleet.
PROOF The proof is by induction. Assume that (the first) j - I refueling points were selected at the balance point. Then point j , the next refueling point that maximizes range, is located at the balance point X * where C ( X * ) = S(X*) . Such a point X* exists since S [ Z U - l ) ] > C[Z( j - I ) ] = 0, S ( X ) is decreasing, and C(X) is in- creasing.
Assume X* is a feasible point, i.e., X* < r2 [from (2)]. Case a: Assume that the jth refueling point occurs at distance X > X* where
S ( X ) < C ( X ) . After refueling at X the amount of fuel in the advancing fleet is S ( X ) < d (where d is the total capacity of the advancing fleet).
At these points 1,2, . . . j - 1 all advancing vehicles are filled to capacity. Let S(X,) represent the amount of surplus fuel for the K{+ tankers designated to transfer fuel at the next refueling point j + 1. The function S(X) is linear decreasing in X for (X > 20’)). Let C(X) represent the unused capacity of the remaining fleet at distance X . The function C ( X ) is increasing in X for (X > Z ( j ) ) .
If refueling takes place at X* the amount of fuel at X is d - [ C ( X ) - C ( X * ) ] . Since S(X) < C(X*) then d - [C(X) - C ( X * ) ] > S ( X ) . Therefore, there is more fuel in the advancing fleet at point X if refueling takes place at the balance point X*.
Case b: If refueling takes place at X or at X* the remaining vehicles are at full capacity with total fuel d, but since X* > X the refueling at X* is superior as the fleet is farther away from the origin with the same amount of total fuel d.
Since the above arguments are also true for j = 1 the inductive proof is fin- ished. Q.E.D.
The solution can be derived in several steps. First, it is shown that when a fixed sequence is given (the KJi’s are known), Pl(m) is reduced to a linear programming problem that can be solved by a simple algorithm involving a set of recursive equations. It is then shown that the optimal fixed sequence is the “unit sequence”-a sequence of K, refueling operations each comprising a single tanker, i.e., KJi = 1, j = 1 , . . . , K i .
3. SOLUTION PROCEDURE FOR A FIXED SEQUENCE
Note that Pl(m) is nonlinear with product terms such as RJ K { . For any fixed tanker refueling sequence of the form S = [KI,K:,Ki, . . . ,K;-’], such that X,”=;’ kJl = K,, Pl(m) reduces to a linear program. After placing constraints ( l ) , (2), and (3) in recursive form, the linear program is stated below as P2:
PROBLEM P2:

320 Naval Research Logistics Quarterly, Vol. 32 (1985)
subject to: RJ = d - aJ (6)
(7)
j = m, (8)
RJ 2 0 , j = 1 , . . . ,m, (9)
j = 1, . . . , m - 1, 1 2
J - I
RJ I rz - R',
RJ 5 - 2 r2 - 2 R v ) ,
"=O
'i v = o
Ro = 0 ,
where for j = 1, , . . ,m - 1 the constants are defined as
aJl = KJldllb',
4 = K'ql/b', I - I
b' = q,(KI + KJ, - c e) + K2q2 v = o
= qi(2RJi + + K2q2, where
Solution Procedure for P2
Due to the triangular structure of the constraints (6) , (7), and (8), and due to the separability of the objective function in RJ, the solution may be found by the following recursive procedure:
Givens, a{, a4 , j = 1, . . . , m - 1,
STEP 1. STEP 2 . STEP 3.
STEP 4.
Let Z(0) = 0, j = 1 Compute RJ = aJ, - a$ * Z ( j - 1) If RJ > r2 - Z ( j - 1) GO TO Step 4. Otherwise Z ( j ) = Z ( j - 1) + RJ L e t j = j + 1 If j < m return to Step 2. Let m* = j (j - 1 is the last refueling point)
Rm* = 2 [r2 - Z ( j - l)]
Z(m*) = Z(m* - 1) + Rm* Set RJ = 0, j = m* + 1, . . . , K l STOP
1
Note R"* is determined by the one-way reach of small aircraft. Since Z ( j ) = DV=, R",
m*
maximize Z ( S ) = 2 RJ = z ( m * ) . J = I

Mehrez and Stem: Optimal Refueling Strategies 32 1
4. UNIT MULTIPLE REFUELING CHAIN Define a unit multiple refueling chain as one in which at each transfer operation a
single tanker refuels all remaining vehicles (both tankers and small AIC) and returns to its base. A special solution is obtained where all refueling segments Rj ( j = 1 , . . . ,m - 1) are of equal length. In such a case if m is large enough the maximum possible operational range for the set of K2 small A/C is equal to the one- way range of a single aircraft, i.e., Z(S) = r2. The following set of theorems leads to this result.
Define a unit multiple refueling chain “unit sequence” by the sequence S = [ l , l , . . . , I ] i.e., KJ, = 1 for j = 1 , . . . ,m - 1.
Let j - I
C K ; = ~ - I , q = o . u = o
The coefficients in Eq. (6) become
d, = dllb’,
= q,/b’, j = 1 , . . . ,m - I ,
b’ = qiKi + qzKz + (2 - j)qi.
Recursively, b’ can be written as
b’ = & - I - q,, j = 1 , . . . ,m - 1
or
& = b ’ - ( j - l)ql.
Define p = r l l rz as the “one-way reach ratio.” This ratio represents the ratio of the maximum unrefueled range of a single tanker over a small aircraft.
LEMMA 1: If p < K1 + (qz/ql)Kz + 1 then the maximal distance to the first refueling point, R1, is determined by the balance point
PROOF: Let Ro = 0, then
R I = min{aj - a:R”, r2 - R”} ,
where
LEMMA 2: If p > K, + (q2/ql)K2 + I then R‘ = r2 and the first refueling operation is the last with all K, tankers returning to base with excess fuel. The small aircraft are refueled at their maximum one-way range, r2 for the return trip to the base, and there are no further refueling operations.
To analyze structures that are not as overpowered and trivial as that of Lemma 2,

322 Naval Research Logistics Quarterly, Vol. 32 (1985)
let us assume that the parameters are such that the first refueling operation occurs at the balance point a ; .
To further substantiate this effort it is easy to show that this case is not unusual, especially if p < 3. For example, one may normally assume 0 < q2/q l < 1 . In ad- dition, it is reasonable to assume that the minimum number of tankers is KI = 1 and the minimum number of small A/C is K2 = 2. Then
Since q2/q l > 0, then 3 < K , + (q2/q,)K2 + 1. We can now say that if pI = r l / r 2 < 3 then no matter what the system configuration
(i.e., any K,, K2, q2 f q, ) , it is better at the first transfer operation to transfer fuel at the balance point with the first tanker returning to the base without excess fuel.
THEOREM 2: For a unit multiple refueling chain the solution to the recursive sequence
is - RJ = at, j = 1, , . . ,m - I , where Ro = 0.
PROOF:
(i) Use Lemma 1 where the one-way small aircraft reach bound on R' is not tight.
(ii) To show I?' = at = d l / b l then Given Ro = 0, R' = at.
- - RZ = R' = at, - - R2 = a: - a : . R ' ,
- - (iii) GivenR' = R' = * * - RJ-' = d , / b t = at then for all j 2 2, RJ = at. Since
Z(j + 1) = Z(j) + R J + ' , whereZ(j) = ~ , J ~ = ~ R " then
- RJ = -
= d l / b ! = qt = R ' .
d , - q d j - I ) i ' - dl - q l ( j - 1 ) ( d l / b ; ) @ bl - ( j - I)q,
-
THEOREM 3: If RJ, < R$ then transfer operations are spaced a constant a ! distance apart until the j*th transfer operation where
a
Q I [(K, + 1 + (q2/qJK2)1+. j * = 2
RJ I = ( l / ~ [ d ~ - sl%j - 1)1,
R4 = d2 /q2 - Z(j - 1).
(Note: [XI' is the largest integer I X.)

Mehrez and Stem: Optimal Refueling Strategies 323
PROOF: RJ = min{R/,,R$}, where RJ = RJI when R{ < R$ From Theorem 2, -
RJ I = R' = af = d l / b l ,
j < r21R' = ( r 2 b ' ) / d , ,
j < ( r 2 / r l ) W l + 1 + (q2/ql)K21r
R I < d2/q2 - 0' - l)R1,
max j = j * = [(r2/rI)[KI + 1 + ( q 2 / q 1 ) K 2 ] ] + .
Further Observations
The length of the equal refueling segment is an asymtotically decreasing function of K I , the number of tankers, i.e.,
R1(K,) = dl /b l = r l / ( K i + 1 + qK2).
The number of equal refueling segments increases as a function if K I , i.e.,
j * ( ~ , ) = [ r 2 / k 1 ( ~ , ) ] + .
Since for each feasible refueling operation the following is required:
j < r 2 / R 1 ( K l ) .
5. OPTIMAL SEQUENCE THEOREM
THEOREM 4 (unit sequence): The unit refueling sequence composed of (Kll = 1 ; j = 1, . . . ,K l ) one tanker at each of KI refueling operations is optimal for the maximal range mixed-vehicle fleet problem.
PROOF: Let S = [KI,G:, . . . ,KJi-',KJl, . . . ,K;] be a refueling sequence with interrefueling distances R',R2, . - ,RJ-',RJ, . . . ,RP. Let ZU) be the distance from the origin to the jth refueling point where K{ tankers transfer fuel and begin their return to the origin. From Eq. (1) at the balance point,
R J = aI4 - 41ZG - 111 qiUQ + 2 4 , ) + K2q2'
Let S' = [Ki,G, . . . ,KJI-', l,K{ - 1, . . . ,KT! be a second sequence with inter- refueling distances R',R2, . . . ,RJ-',R,RJ, . . . ,RP, where
Solving for RJ:

324
where
Naval Research Logistics Quarterly, Vol. 32 (1985)
Di = qi[& + 2(KJi - 111 + K2q2,
D2 = q,(kJ, + KJ,+’) + K2q2 > 0 .
To show S’ is superior than S it is sufficient to show R + RJ > RJ. Solving for A = (I? + RJ) - RJ after much algebraic manipulation:
A = W q , ) ( K J , - 1MkI + K’) + K2q21 > 0.
Since KJ, - 1 > 0 and E = dl - q l Z ( j - 1) > 0. This shows that a greater range is attained by the remaining advancing fleet (I?’ = K , - Dp= I K ; tanker and K 2 small aircraft) under the policy S’. Similarly, if each refueling operation comprising KJ, tankers (where KJl > 1) is split into two refueling operations comprising 1 and KJl - 1 tankers, the result is a greater range. After a finite number of such local improvements the “unit sequence” is reached and no further improvement is possible. Q.E.D.
The unit sequence theorem may be specialized for a fleet of identical vehicles as follows: Consider that the K 2 small aircraft are replaced by a single tanker of like genre to the K I tankers. Then the fleet is composed of K I + 1 identical vehicles (n = KI + 1). For the “unit sequence” from Theorem 1 the interval between re- fueling operations is given by
RJ = d , / b ’ = d l / [ q , ( K l + 1) + q 2 K 2 ] -
= ~ I / [ K I + 1 + ( q ~ / q i ) K 2 1 .
Specializing this result for an identical fleet where K 2 = 1, q2/q1 = 1, and K I + 1 = n yields
- RJ = r l / ( K l + 2 ) = r l / ( n + I),
the same result obtained in [ I ] [equation (17) for Strategy 2-the multiple transfer refueling chain].
6. MINIMUM NUMBER OF TANKERS FOR MAXIMAL RANGE
PROPOSITION: The minimum number of tankers KT required to advance K 2 small aircraft to their maximal possible range r2 is the solution to
K* = [p(KT + 1 + qK2)]+ + 1,
where p = r l / r z . q = q 2 / q l .
PROOF: Given K 1 , the maximum number of feasible refueling segments is
(i)
then
(ii) KT = j * + 1.
If KT = K I then KT is minimum such that (i) is true. Adding + 1 to both sides of (i) and replacing the left side by (ii) yields
j * = MKI + 1 + qK2)1+
(iii) K* I = [MI + 1 + 4K2)l+ + 1.

Mehrez and Stem: Optimal Refueling Strategies 325
Table 1. Maximum operational range as a function of number of tankers.
Number of Equal range MaximJm range Distance of tankers, K, segments R' rJR' j * zw last segment
1 0.833 4.8 4 2.416 1.583 2 0.769 5.2 5 2.769 1.23 3 0.714 5.6 5 3.07 0.928 4 0.666 6.0 6 3.33 5 0.625 6.4 6 3.56 0.4325 * 6 0.588 6.8 6 3.76 0.235 * 7 0.555 7.2 7 3.94 0.55 *
opt. 8 0.5263 7.6 7 4.00 0.315
9 0.500 8.0 8 4.00 0 * 10 0.476 8.4 8 4.00 0.190 11 0.454 8.8 8 4.00 0.363
The minimum number of required tankers K? may be found by solving (iii) in an iterative manner.
EXAMPLE:
K , = 8, K , = 20, 41 = 10, 42 = 5 , d, = 100, dl = 20,
j * = [rdk' l ' = [ ( ~ J ~ I ) W I + 1 + ( q ~ / q , ) K ~ ) l + , j * = [(4/10)[8 + 1 + (0.5)(20)]]+ = [7.6]+, j * = 7.
This implies for eight tankers the optimal solution is 7 equal segments where the 7th transfer operation is the last for which a perfect balance occurs. The tanker par- ticipating in the last refueling operation returns to the origin with some surplus fuel after filling all small aircraft to their maximum capacity. This final refueling point is a distance of rz = 4 from the origin requiring the K2 small aircraft to, immediately upon being refueled, proceed back to the origin.
The computations as a function of K I are shown in Table 1. The interrefueling point distances for the minimum tanker solution are
- RJ = 0.5263, j = 1, . . . ,7, RE = 4 - 7 * (0.5263) = 0.315.
7. FIXED NUMBER OF REFUELING OPERATIONS
Practical considerations frequently limit the number of refueling operations. Table 2 shows computational results that indicate that the maximal range is an increasing function of the numbers of such operations. Further examination of the results in the table leads to the following conjecture:
CONJECTURE: When the limit on the number of refueling operations is less than the total number of tankers, K1, a nonincreasing sequence is optimal.

326 Naval Research Logistics Quarterly, Vol. 32 (1985)
Table 2. Maximum range versus fixed number of refueling operations.
K , tankers Sequence S Maximum range
1 1 2.416
2 1 1 2.76 2 2 2.714
3 3 2.937 3 1 2 3.020 3 2 1 3.028 3 1 1 1 3.07
4 4 3.000 4 1 3 3.1667 4 3 1 3.225 4 2 2 3.25 4 2 1 1 3.2980 4 1 2 1 3.2925 4 1 1 2 3.2857 4 1 1 1 1 3.333
8. GEOMETRIC EXTENSIONS TO DIFFERENT NONTANKER RECOVERY BASE
Let the nontankers’ maximal range be Z(m) measured along a vector directed from the origin base, say at point B, to a point M along the line of the mission. Assume as before that the tankers must return to B, but the nontankers may be recovered at a friendly base located at point P which is closer than B from M. Define P by its polar coordinates [a ,D] , where D is the distance measured along the vector BP from B to P, and a is the angle between the vectors BM and BP. Define X as the distance from the maximum range point M to the recovery base at P. To satisfy the requirement that the friendly recovery base be closer than the home base assume X < M. This implies that a is an acute angle and X may be determined using the cosine rule as
X = [Z(rn)’ + D 2 - 2Z(m)D cosa]”*.
Since D and (Y are fixed, X is a nonlinear function of the maximal range Z(m). Moreover, X = f[Z(m)] is convex in Z(m) taking on its minimum when Z(m) = D cosa. The effect on the formulation of problem Pl(m) is to change the nontanker return constraint (3) which becomes R” + X 5 r2. This in no way affects the balance point Theorem 1 as C(X) , the unused capacity of the remaining fleet is still increasing in X. Also S(X) remains a decreasing function of X. Although constraints (3) and (9) are nonlinear, the solution procedure for a fixed sequence described in Section 3 remains unchanged except for Step 4, where Rm* = r2 - X. Moreover, the assump- tion that the nontankers have an alternative recovery base at P # B does not affect the optimal sequence Theorem 4. A greater range is still attained by the remaining advancing fleet by removing 1 from K{ to create an additional refueling point to the sequence. At the (P - j)th point a greater range is still attained pushing the remaining fleet now completely refueled further toward the line of advance. The maximum push may now result in a larger R” = r2 - X since X is shorter than Z(m) by the triangular inequality.

Mehrez and Stem: Optimal Refueling Strategies 321
9. REFUELING ON THE RETURN TRIP
In this section we describe a number of tanker operational strategies for refueling nontankers on their return trip in order to further extend their maximum range. It is assumed that a tanker refueling zone be established no further than, say, Q distance units from the origin base. The refueling strategies will still operate under the as- sumption of a fixed number of K , tankers and K2 nontankers. The three strategies described are (a) split tanker, (b) loiter, and (c) reuse. The first two strategies require that each tanker give fuel only once while strategy (c) allows tankers to provide fuel twice.
Split Tanker Strategy
In this strategy we assume that the K , tankers are split into two subtanker fleets: F , containing K , - y tankers, and F2 containing y tankers, where y is a variable. Subfleet F , departs from the base with the K 2 nontankers refueling on the way out. After all F , tankers have finished refueling, say at distance 2, the nontankers continue forward reaching their maximal range. On the nontankers’ remrn trip they are met by tankers from subfleet F2 and are refueled on the return trip. The two subfleets are considered independent and do not refuel each other.
Loiter Strategy
The entire fleet K , and K 2 depart from the origin base refueling until the limits of refueling zone are reached. The remaining tankers loiter until the K 2 nontankers reenter the refueling zone at which point the remaining tankers accompany the nontankers on their return trip refueling as required.
Reuse Strategy
The entire fleet K , and K2 depart from the origin base. Each tanker that returns to the base is refilled and possibly after a fixed time departs again to rendezvous with the remaining fleet to refuel them on the way back. In this strategy tankers may transfer fuel more than once.
Elements of the results of this article may be used to determine the base refueling strategy for each of the three operational tactics, but this will be left for further research.
10. CONCLUSION
In this article the problem of maximizing the operational range of a K,-out-of-n system is solved using a simple recursive algorithm. The algorithm is based on the optimal refueling sequence which is shown to be a “unit type,” i.e., at each refueling operation exactly one tanker gives fuel to the rest of the advancing fleet after which it immediately returns to the origin.
It is also shown that the set of small aircraft may attain their maximal operational range with a finite number of refueling tankers. Several computational examples are given as well as a conjecture on the nature of the optimal refueling sequence for the problem with a fixed limit on the number of refueling operations. It is shown that the analysis can be applied with little modification when recovery of nontanker aircraft

328 Naval Research Logistics Quarterly, Vol . 32 ( 1985)
occurs at a friendly base closer than the origin. Three tanker operational strategies are described for refueling nontankers on their return trip. The detailed solutions for these strategies will be left for further research. This work is in response to a problem described as “of some importance” by an anonymous referee.
REFERENCES [l] Mehrez, A., Stern, H. I.,and Ronen, D., “Vehicle Fleet Refueling Strategies to Maximize
Operational Range,” Naval Research Logistics Quarterly, 30, 3 19-342 (1983).