Embed Size (px)
Citation preview

Optimization for Network Optimization for Network PlanningPlanning
Includes slide materials developed by Wayne D. Grover, John Doucette, Dave Morley
© Wayne D. Grover 2002, 2003
E E 681 - Module 3
(version for book website)

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 2
Outline
• Optimization– Mathematical Programming– Linear Programming (LP)– Formulating LP Problems– Solving LP Problems– Integer Programming– Solving MIP Problems– Algebraic Expression of LP/IP Problems
• Mesh-Restoration Concept– Terminology– Spare Capacity Sharing– Spare Capacity Placement (SCP)– SCP Integer Programming problem

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 3
Mathematical Programming
1 T.W. Knowles, Management Science: Building and Using Models, Irwin, 1989.
Maximize (or minimize):
Subject to:
Constraints
Objective
• Definition– “A Mathematical Programming Model is a mathematical decision
model for planning (programming) decisions that optimize an objective function and satisfy limitations imposed by mathematical constraints.” 1
• General Symbolic Model
…
nxxxf 21,
1 1 2 1
2 1 2 2
, , ,
, , ,
n
n
g x x x b
g x x x b
1 2, , , m n mg x x x b
… where are the decision variables.nxxx 21,

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 4
Mathematical Programming
• Types of Mathematical Programs:– Linear Programs (LP): the objective and constraint functions are
linear and the decision variables are continuous.– Integer (Linear) Programs (IP): one or more of the decision
variables are restricted to integer values only and the functions are linear.
• Pure IP: all decision variables are integer.• Mixed IP (MIP): some decision variables are integer, others are
continuous.• 1/0 MIP: some or all decision variables are further restricted to be
valued either “1” or “0”.
– Nonlinear Programs: one or more of the functions is not linear.

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 5
Linear Programming
Maximize:
Subject to:
Constraints
Objective
Bounds
… where jjij cba ,, are the model parameters.
• General Symbolic Form
…
nnxcxcxc 2211
11 1 12 2 1 1
21 1 22 2 2 2
, ,
, ,
n n
n n
a x a x a x b
a x a x a x b
1 1 2 2 , ,
0 , 1, ,
m m mn n m
j
a x a x a x b
x j n

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 6
Linear Programming
• General Restrictions– All decision variables must be nonnegative,– Constant terms cannot appear on the LHS of a constraint.– No variable can appear on the RHS of a constraint.– No variable can appear more than once in a function, i.e. objective
or constraint.
• Steps for Formulating LP Models– Construct a verbal model.– Define the decision variables.– Construct the symbolic model.
.0jx

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 7
Formulating LP Problems
2 from, R. Fourer, D. Gay, B. Kernighan, AMPL, Boyd & Fraser, 1993, pp. 2-10.
Tons/ Profit/ hour ton
Bands 200 $25Coils 140 $30
Maximum tons: Bands 6,000Coils 4,000
• An example2
– A steel company must decide how to allocate production time on a rolling mill. The mill takes unfinished slabs of steel as input and can produce either of two products: bands and coils. The products come off the mill at different rates and also have different profitabilities:
– The weekly production that can be justified based on current and forecast orders are:

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 8
Formulating LP Problems
Maximize: total profitSubject to: total number of production hours 40
tons of bands produced 6,000tons of coils produced 4,000
• An example (cont’d)– The question facing the company is: If 40 hours of production time
are available, how many tons of bands and coils should be produced to bring in the greatest total profit?
• Constructing the Verbal model – Put the objective and constraints into words.– For constraints, use the form
{a verbal description of the LHS} {a relationship} {an RHS constant}

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 9
• Defining the Decision Variables – XB number of tons of bands produced.
– XC number of tons of coils produced.
• Construct the Symbolic Model
Formulating LP Problems
Maximize:
Subject to:
CB XX 3025
4014012001 CB XX
60000 BX
40000 CX

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 10
Solving LP Problems
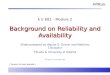
Bands00 2000 4000 6000 8000
Coils
2000
4000
6000Constraints
Feasible region
00 2000 4000 6000 8000
Bands
Coils
2000
4000
6000220K
192K
120K
Profit
Optimal solution
Hours
• Graphical Solution Method

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 11
Solving LP Problems
Unique Optimal Solution Alternate Optimal Solutions
No Feasible Solution Unbounded Optimal Solution
• 4 Possible Outcomes

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 12
Solving LP Problems
• Simplex method– Efficient algorithm to solve LP problems by performing matrix
operations on the LP Tableau.– Developed by George Dantzig (1947).– Can be used to solve small LP problems by hand.
• AMPL and CPLEX– AMPL: modeling language (and software) for designing large and
complex LP/IP problems.– CPLEX: software package (“solver”) to solve large and complex
LP/IP problems.
• Sub-Optimal Algorithms (Heuristics)– Simulated annealing.– Genetic algorithms.– Tabu search.– Many others, often very specific to the type of problem.

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 13
Integer Programming
Maximize:
Subject to:
CB XX 3000025000
4014010002001000 CB XX
,60 BX
,40 CX
integer
integer
• Convert Example to Integer Program– Assume that orders for bands and coils are placed (and filled) in
1,000s of pounds only.– Although feasible region is greatly reduced, problem becomes much
more difficult.
• New Symbolic Model– Let the new decision variables be the number of 1000 pound “units”
or orders of bands and coils.

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 14
Integer Programming
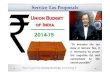
00 2 4 6 8
2
4
6
Feasible integer solutions
Bands
Coils
$185K
Optimal integer solution ($185K)
• Graphical Solution Method

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 15
Solving MIP Problems
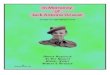
• Branch-and-Bound Procedure– The solution space consists of a tree of LP subproblems, in which each
integer variable is either fixed or its integrality constraint is “relaxed.”– The root node of the tree is the LP relaxation of the problem, i.e. all
integer variables are relaxed.– The relaxation can result in an all integer solution, or a fractional
solution (some decision variables are non-integer).– If the solution of the relaxation has fractional-valued integer variables, a
fractional variable is selected for branching and two new subproblems are generated, each with more restrictive bounds on the branching variable.
– The subproblems can result in an all integer solution, an infeasible problem or another fractional solution.
– If the solution is fractional, the process is repeated.– Branches are “fathomed” if the subproblem is infeasible, the objective
value is worse than the current best integer solution or the subproblem gives an integer solution.

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 16
Solving MIP Problems
0
1 2
3 6
4 5
Bounds0<=XB<=60<=XC<=1
SolutionObj. = 180KXB = 6.00XC = 1.00
Bounds6<=XB<=62<=XC<=4
Solution*Infeasible
Bounds0<=XB<=53<=XC<=4
SolutionObj. = 183KXB = 3.00XC = 3.71
Bounds0<=XB<=60<=XC<=4
SolutionObj. = 192KXB = 6.00XC = 1.40
Bounds0<=XB<=62<=XC<=4
SolutionObj. = 189KXB = 5.14XC = 2.00
Bounds0<=XB<=52<=XC<=4
SolutionObj. = 189KXB = 5.00XC = 2.10
Bounds0<=XB<=52<=XC<=2
SolutionObj. = 185KXB = 5.00XC = 2.00
1
2
3
4
5
6 8
7
9
10
• Branch-and-Bound Tree (Example)

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 17
Algebraic Expression of LP/IP Problems
• Why use it?– Most LP/IP problems are quite large and it becomes very
cumbersome to describe them by explicitly giving each linear function, equality, and inequality in full.
– It is desirable to model problems in a more general fashion (e.g. give an IP for optimally designing a mesh-restorable network in general as opposed to doing so for a specific network).
E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 18
Algebraic Expression of LP/IP Problems
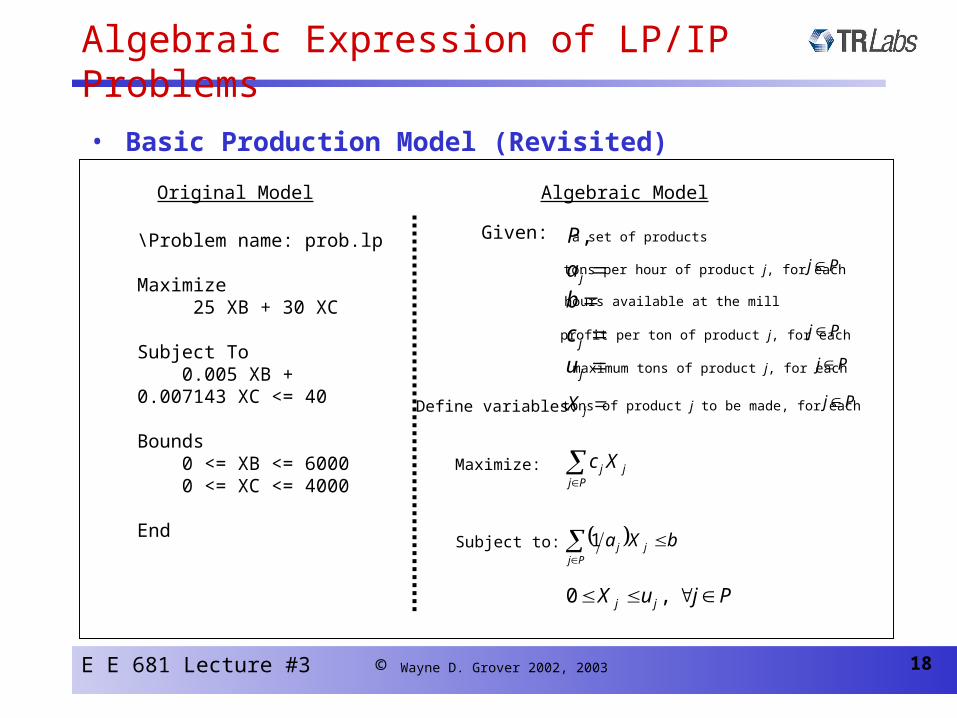
• Basic Production Model (Revisited)
\Problem name: prob.lp
Maximize 25 XB + 30 XC
Subject To 0.005 XB + 0.007143 XC <= 40
Bounds 0 <= XB <= 6000 0 <= XC <= 4000
End
Maximize:
Subject to:
Pj
jjXc
bXaPj
jj
1
PjuX jj ,0
Given: ,P a set of products
hours available at the millbtons per hour of product j, for eachja Pj
profit per ton of product j, for eachjc Pj
maximum tons of product j, for eachju Pj
Define variables: jX tons of product j to be made, for each Pj
Algebraic ModelOriginal Model

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 19
Example: LP/IP for Mesh-Restoration Design• Networks are Inherently Mesh-Like
• Distributed mesh-restoration exploits network connectivity to allow sharing of redundancy.
Level(3)North American Network

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 20
Spare Capacity Sharing
• Consider 2 different failure scenarios
X
X
– Restoration is allowed to follow multiple distinct routes.– Restoration route for both failure scenarios have several spans in
common.– Spare capacity on each span contributes to restorability of many
spans.

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 21
Spare Capacity Placement (SCP)
• Optimal Design– Objective is to find least costly way to place sufficient spare capacity
on a network such that all spans are fully restorable.– Can we use LP/IP?– Reference:
• M. Herzberg and S. J. Bye, “An Optimal Spare-Capacity Assignment Model for Survivable Networks with Hop Limits”, IEEE Globecom’94, 1994
• Integer Programming Approach– Objective Function:
• Minimize Cost of Spare Capacity Placement
– Constraints:• Each possible span failure has enough restoration flow for full
restoration.• Enough spare capacity exists on each span to accommodate restoration
flows.

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 22
SCP Integer Programming Problem
• Parameters (Inputs)– Cj: Cost of each unit of capacity on span j
– Li: Target Restoration level for span i (Li = 1 assumed)
– S: Number of spans in the network
– Pi: Number of eligible routes for restoration of span i
– wj: Number of working links (capacity units) on span j
i,jp: Equal to 1 if pth eligible route for span i uses span j
• Variables (Outputs)– fi
p: Restoration flow assigned to pth route for span i
– sj: Number of spare capacity units placed on span j

E E 681 Lecture #3 © Wayne D. Grover 2002, 2003 23
SCP Integer Programming Problem
• Objective Function:
• Subject To:
– 1.
– 2.
s
jjj sCMinimize
1
.,...,2,1 Si
jiSji .,...,2,1),(
ii
P
p
pi Lwf
i
1
iP
p
pi
pjij fs
1,