Embed Size (px)
Citation preview

26
Rev. Téc. Ing. Univ. Zulia. Vol. 32, Nº 1, 26 - 40, 2009
Optimization of a seismic ray tracing with globalization method in anisotropic medium 3D
Guy Vernaez H.¹ y Rina Surós1
¹ Centro de Computación Paralela y Distribuida, Facultad de Ciencias, Universidad
Central de Venezuela, Caracas 1040, Fax 58 212 6051131, Telf. 58 212 6051325, [email protected] [email protected]
Abstract
In this paper we show a solution for a seismic ray tracing in 3D problems on convert
wave in anisotropic medium. The equations involve in the seismic equation are severely
no linear, in that way, we introduce a globalization technique that make possible find a
solution from any initial iterate for resolve this kind of equation. We use a method
developed for a search of minimum and the convergence of the method is guaranteed.
Too we implement a visual tool that permits to represent similar situations to the
geological realities. We compare two techniques of optimization, we use the times of
prosecution of the algorithms and the graphic representations of the designed rays on an
assembly of geological anisotropy media.
Key words: Seismic ray tracing, numerical optimization, anisotropy media.
Optimización de un trazador de rayos sísmicos con técnicas de globalización en
medios anisótropos 3D
Resumen
En este trabajo se presenta una solución al problema de Trazado de Rayos Sísmicos en
3D para la onda convertida, en medios anisótropos. Las ecuaciones involucradas en el
problema de ecuación sísmica son fuertemente no lineales, por lo que los métodos para
resolver estas ecuaciones necesitan ser asociados a técnicas de globalización que
permitan garantizar la convergencia a puntos críticos desde cualquier iterado inicial. Una
de las contribuciones de este artículo, es la utilización de un método para la búsqueda de
mínimos, que nos garantiza la convergencia deseada. Otra contribución dentro del
trabajo es la utilización de una herramienta visual que permite representar situaciones
similares a las realidades geológicas. Se comparan dos técnicas de optimización, usando
para esto los tiempos de procesamiento de los algoritmos y las representaciones gráficas de los rayos trazados sobre un conjunto de medios geológicos anisótropos.
Palabras clave: Trazado de rayos sísmico, optimización numérica, medios
anisotrópicos.
Recibido el 20 de Noviembre de 2007 En forma revisada el 02 de Febrero de 2009
Introducción
En este trabajo aplicaremos una técnica de optimización numérica en los problemas de
geofísica y la integraremos a un trazador de rayos sísmicos basado en la propuesta de
Reyes [1] para mejorar los tiempos de procesamiento del cálculo y los tiempos de viaje.
Tomaremos para esto, el algoritmo de optimización numérica desarrollado por Raydan
[2] y veremos algunos de sus beneficios. Se utilizara una herramienta de visualización
que facilite la representación de realidades geológicas complejas. Esta herramienta

27
además de facilitarnos la construcción y manipulación visual de los medios también nos
permite convalidar algunos casos donde la convergencia de los algoritmos produce cierta
ambigüedad en este sentido.
Este artículo contempla la siguiente organización: en una primera parte, describimos el
análisis utilizado para la modelación del rayo y su relación con las ecuaciones a resolver.
A continuación se hace un estudio del modelo de anisotropía que se utilizará y se plantea
el sistema de ecuaciones que define el trazado del rayo mínimo mostrando su relación
con el método de optimización numérica. Luego se presentan los resultados haciendo
una comparación de los dos algoritmos, y por último se exponen las conclusiones sobre los resultados numéricos obtenidos.
Modelado del Rayo
En este trabajo consideramos los llamados métodos de “Bending” o doblamiento,
incorporados en la sísmica por Wesson [3], Chander [4]y Julian y Gubbins [5], como
base para resolver el problema de trazado de rayos sísmicos. Estos métodos utilizan el
principio de Fermat, que establece el mínimo tiempo de viaje entre dos puntos (fuente y
receptor). Se comienza asignando un camino arbitrario que conecta la fuente con el
receptor y se deforma esta trayectoria inicial con el fin de reducir y finalmente minimizar
el tiempo de viaje del rayo.
El rayo se puede expresar como:
donde ri es el trozo de curva que conecta los puntos Pi(xi,yi+Zi) y Pi+1(Xi+1,Yi+1,Zi+1). La aproximación a ri está dada por la expresión:
con , los vectores unitarios en las direcciones y en el sentido positivo de los ejes
x, y, z respectivamente.
El parámetro t, representa la longitud de la curva normalizada y se define de modo que
para todo número t, tal que 0≤ t ≤ 1.
Las funciones fi,j (t) se definen mediante una combinación lineal de funciones B_Spline de Bezier de la forma:
donde M-1 es el grado de la función fi,j (t). Llamamos a los rei.j.K coeficientes espectrales
de la curva ri y los Bk(t) son las funciones B_Spline.
De este modo, el segmento de curva ri queda definido mediante los nueve coeficientes rei.j.K , con j = 1,2,3; y K = 1,2,3.

28
En virtud de las características del método, las ecuaciones resultan importantes dado
que estamos interesados en modificar la trayectoria del reya con el fin de minimizar el
tiempo de viaje. El número de parámetros independientes que definen la trayectoria del rayo es:
Modelado de la Anisotropía
El desarrollo teórico que sustenta a este trabajo lo constituye el estudio de los modelos
Débilmente Anisótropos propuesto por Thomsen [6], este autor utilizó los coeficientes de módulos elásticos y definió los siguientes parámetros de anisotropía:
Estos, junto con las ecuaciones de las ondas P y ondas S, que vienen expresadas como:
respectivamente, (donde r es la densidad del medio) las sustituyó en las ecuaciones obtenidas por Daley y Hron [7] hasta obtener:
29
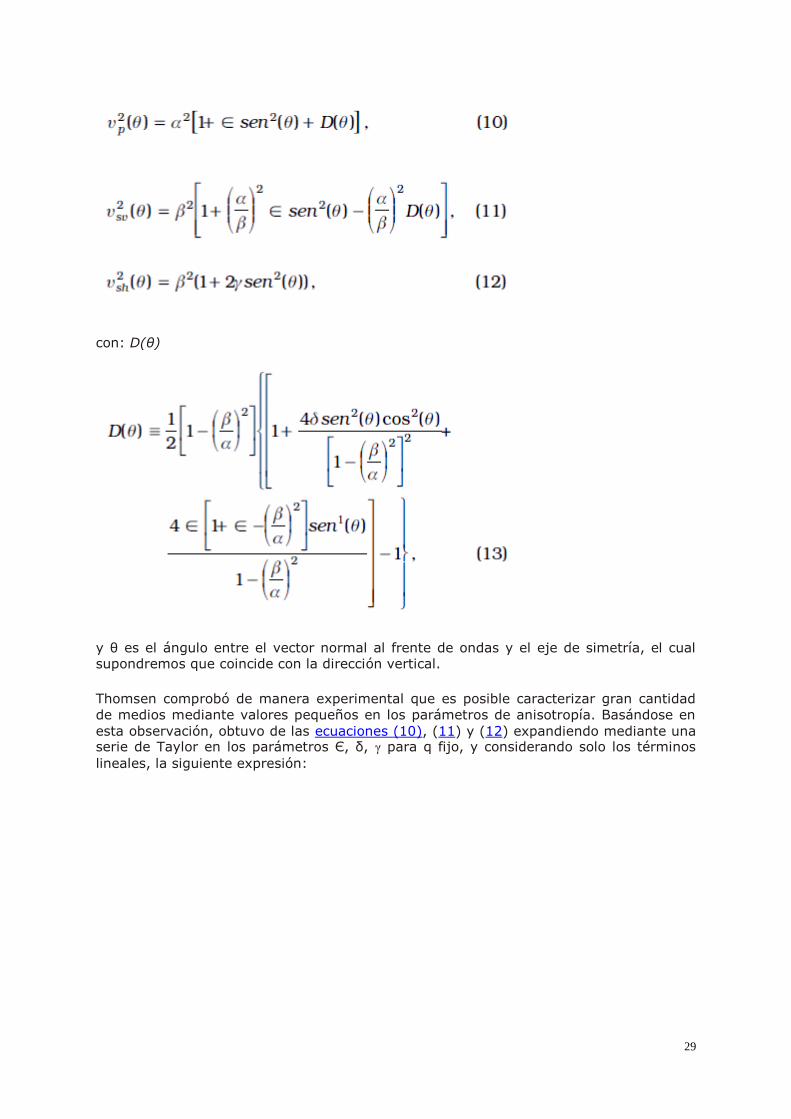
con: D(θ)
y θ es el ángulo entre el vector normal al frente de ondas y el eje de simetría, el cual supondremos que coincide con la dirección vertical.
Thomsen comprobó de manera experimental que es posible caracterizar gran cantidad
de medios mediante valores pequeños en los parámetros de anisotropía. Basándose en
esta observación, obtuvo de las ecuaciones (10), (11) y (12) expandiendo mediante una serie de Taylor en los parámetros Є, δ, γ para q fijo, y considerando solo los términos
lineales, la siguiente expresión:

30
Thomsen denomino a estos medios “Débilmente Anisotrópicos” y encontró que utilizando
esta aproximación lineal se puede determinar la velocidad de grupo o su inverso el grupo
de Lentitudes de las ondas p, sv o sh, si se sustituye en estas ecuaciones el ángulo del grupo Ф que se corresponde con un ángulo de fase θ. Esto es:
En este trabajo las ecuaciones (18), (19) y (20) son utilizadas e implementadas dentro
del nuestro algoritmo, igualmente las expresiones que corresponden a las derivadas de dichas ecuaciones, debido a que el algoritmo está basado en un método de Gradiente.
Optimización Numérica
Dado que el método de bending, esta basado en el principio de Fermat, y de acuerdo al
mismo principio, el rayo buscado es aquel que minimice con respecto a todas las trayectorias posibles R. Esto es:
31
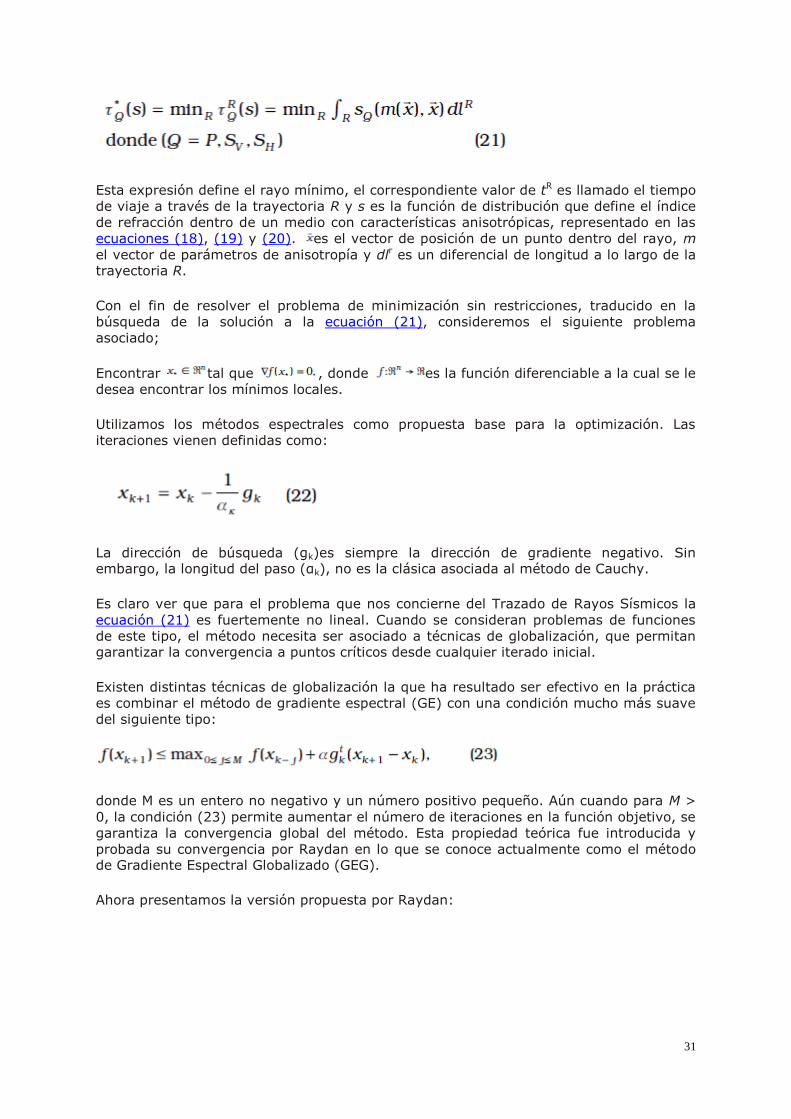
Esta expresión define el rayo mínimo, el correspondiente valor de tR es llamado el tiempo
de viaje a través de la trayectoria R y s es la función de distribución que define el índice
de refracción dentro de un medio con características anisotrópicas, representado en las
ecuaciones (18), (19) y (20). es el vector de posición de un punto dentro del rayo, m
el vector de parámetros de anisotropía y dlr es un diferencial de longitud a lo largo de la trayectoria R.
Con el fin de resolver el problema de minimización sin restricciones, traducido en la
búsqueda de la solución a la ecuación (21), consideremos el siguiente problema
asociado;
Encontrar tal que , donde es la función diferenciable a la cual se le
desea encontrar los mínimos locales.
Utilizamos los métodos espectrales como propuesta base para la optimización. Las
iteraciones vienen definidas como:
La dirección de búsqueda (gk)es siempre la dirección de gradiente negativo. Sin embargo, la longitud del paso (αk), no es la clásica asociada al método de Cauchy.
Es claro ver que para el problema que nos concierne del Trazado de Rayos Sísmicos la
ecuación (21) es fuertemente no lineal. Cuando se consideran problemas de funciones
de este tipo, el método necesita ser asociado a técnicas de globalización, que permitan garantizar la convergencia a puntos críticos desde cualquier iterado inicial.
Existen distintas técnicas de globalización la que ha resultado ser efectivo en la práctica
es combinar el método de gradiente espectral (GE) con una condición mucho más suave
del siguiente tipo:
donde M es un entero no negativo y un número positivo pequeño. Aún cuando para M >
0, la condición (23) permite aumentar el número de iteraciones en la función objetivo, se
garantiza la convergencia global del método. Esta propiedad teórica fue introducida y
probada su convergencia por Raydan en lo que se conoce actualmente como el método de Gradiente Espectral Globalizado (GEG).
Ahora presentamos la versión propuesta por Raydan:

32
Algoritmo de (GEG)
4. (Globalización no monótona)
con 0≤ j ≤ min (k,M) entonces asignar
, e ir a 6.
5. Escoger , asignar e ir a 4.
6. Asignar e ir a 1.
Resultados Numéricos
Para evaluar el algoritmo se realizaron 3 pruebas sobre distintos medios utilizando el
software Vernaez [8] que permitió hacer el levantamiento de los experimentos. Se
consideraban medios geológicos con características físicas distintas, partiendo de medios
con condiciones de Isotropía y posteriormente se complicaron las condiciones de los
medios. Se compararon los algoritmos de optimización GEG y el propuesto por Reyes
que denotaremos en lo sucesivo como B&B que utiliza como técnica de optimización la
propuesta por Barzilai y Borwein [9], ellos proponen para la búsqueda del mínimo la
dirección del gradiente negativo, pero la longitud del paso no en la clásica asociada al método de Cauchy.
En el primero de los medios creado se definen 5 capas todas las interfaces planas y
paralelas entre sí, se considero Isótropo por capas. El segundo caso consta de 4 capas
planas pero no paralelas, se define como anisótropo en donde cada capa posee valores
distintos en las variables que definen su propiedad física. El último caso posee 5 capas y
se considero anisótropo, este medio represento el modelo más complejo de los
estudiados por esta razón se hará un mayor análisis en este caso.
Todas las pruebas sobre los trazadores se realizaron sobre rayos generados por ondas P.
Los valores con una norma menor a Eps de 10-4 que se denotarán en las graficas como
error de aproximación. Un número máximo de 5000 iteraciones. En todos los caso de
prueba se fijó una fuente ubicada en la coordenada (0, 0, 0) y se colocaron 100
receptores distribuidos uniformes.
En la graficas (Figuras 1, 2, 3) que mostramos a continuación se presenta los resultados
de los tres casos estudiados. Las tres graficas muestran la relación entre cada uno de los
emisores y el número de iteraciones necesarias para la convergencia o número máximo
de iteraciones.

33
34
La Figura (2) muestra al igual que la Figura (1) como el algoritmo de GEG en la mayoría
de los casos converge con menos iteraciones que para el caso de B&B. Igualmente ambas graficas fueron truncadas para visualizar mejor los resultados.
Figura Caso 1 se muestran el número de iteraciones necesarias para la convergencia de los algoritmos GEG y B&B en azul y rojo respectivamente receptor.
Figura Caso 2 se muestra el número de iteraciones necesarias para la convergencia de los algoritmos de GEG y B&B en azul y naranja respectivamente para cada receptor.
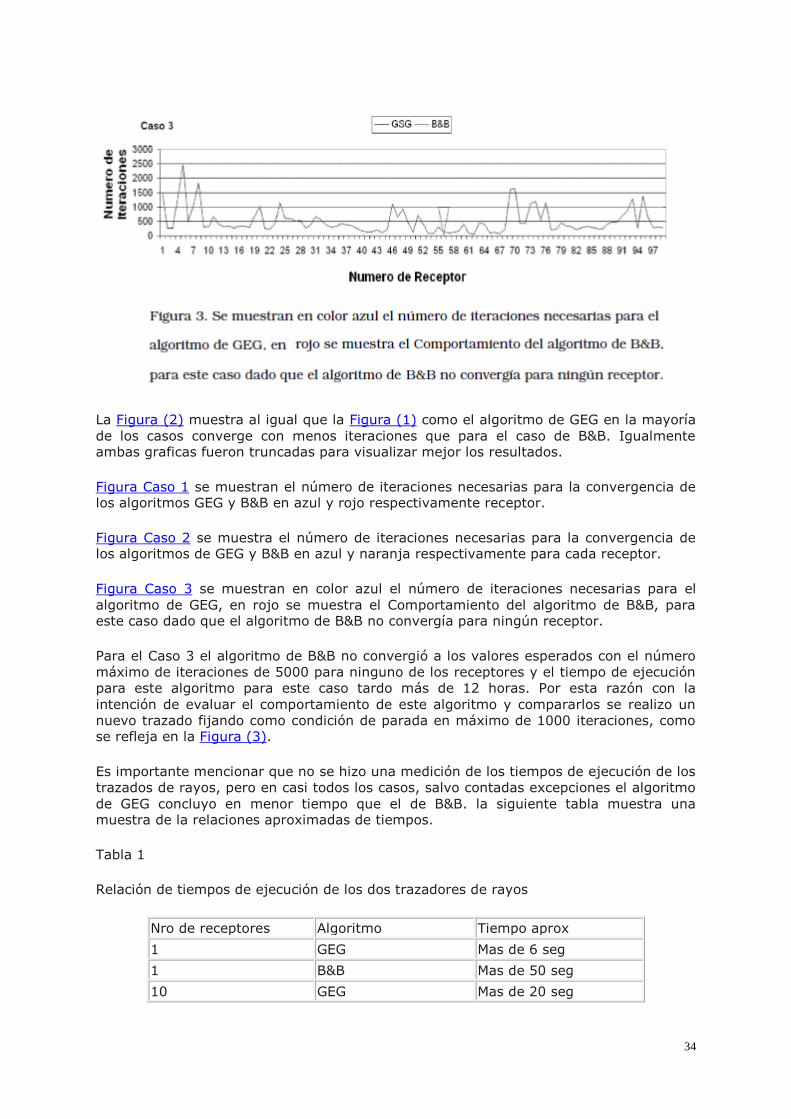
Figura Caso 3 se muestran en color azul el número de iteraciones necesarias para el
algoritmo de GEG, en rojo se muestra el Comportamiento del algoritmo de B&B, para este caso dado que el algoritmo de B&B no convergía para ningún receptor.
Para el Caso 3 el algoritmo de B&B no convergió a los valores esperados con el número
máximo de iteraciones de 5000 para ninguno de los receptores y el tiempo de ejecución
para este algoritmo para este caso tardo más de 12 horas. Por esta razón con la
intención de evaluar el comportamiento de este algoritmo y compararlos se realizo un
nuevo trazado fijando como condición de parada en máximo de 1000 iteraciones, como se refleja en la Figura (3).
Es importante mencionar que no se hizo una medición de los tiempos de ejecución de los
trazados de rayos, pero en casi todos los casos, salvo contadas excepciones el algoritmo
de GEG concluyo en menor tiempo que el de B&B. la siguiente tabla muestra una muestra de la relaciones aproximadas de tiempos.
Tabla 1
Relación de tiempos de ejecución de los dos trazadores de rayos
Nro de receptores Algoritmo Tiempo aprox
1 GEG Mas de 6 seg
1 B&B Mas de 50 seg
10 GEG Mas de 20 seg

35
10 B&B Mas de 300 seg
100 GEG Mas de 200 seg
100 B&B Mas de 3600 seg
En gráficos anteriores se puede apreciar que para algunos receptores el comportamiento
del algoritmo amerita un numero considerablemente mayor de iteraciones que el resto
de comportamiento, estos casos corresponden los receptores ubicados en los bordes del medio definido. Algunos de estos serán revisados a continuación por separado.
Caso 1
Este caso corresponde al medio con características físicas más simples. En la figura (4) mostramos el medio con algunos de los rayos trazados por los distintos algoritmos
En la Figura (4a) se puede apreciar marcada con un círculo rojo una pequeña desviación
de uno de los rayos resultantes que no ocurre en la Figura (4b).
Los gráficos que mostramos a continuación muestran el comportamiento de los dos algoritmos para los casos “bordes”.

36
En la Figura (5a) y (5b) se muestra el comportamiento de los algoritmos B&B y GEG
respectivamente, en el recetor (40) corresponde a la referencia con el círculo rojo en la
Figura (4a). En el grafico se puede ver que el algoritmo B&B no logra la convergencia
deseada en las 5000 iteraciones mientras que el algoritmo GEG la consigue en 145 iteraciones.
Caso 3
A continuación se muestra el medio defino para este caso (Figura 6). Este medio
representa el modelo más complejo de los casos estudiados.

37
Figura 6 Caso 3, medio con el trazado de rayos para los receptores ubicados en uno de
los bordes del medio. El (a) trazado con el algoritmo B&B y el (b) con el algoritmo de GEG.
Al igual que sucedió en el caso 2 en este modelo el algoritmo de B&B presenta algunos
resultados cuya norma del gradiente da como resultado 0. En la capa 3 el receptor 79
(que no representa un caso borde) converge a 0 pero los datos que definen el rayo a
través del medio no se corresponden las coordenadas con el modelo figura (6a) (línea que sale del terreno).
El la Figura (6a y b) se muestran los trazados de los rayos para los receptores 01,02,03,
04, 05,06,07,08,09 ubicados sobre el borde izquierdo en la figura y los receptores 20, 40
y 99 ubicados sobre el borde derecho.
En las Figuras (7a y b) y (8a y b) se muestran los resultados de los algoritmos para los
receptores 02 y 08. En el todos estos gráficos se aprecia que ninguno de los algoritmos
converge con la norma en el algoritmo de B&B en ambas gráficas se detiene por el

38
máximo número de iteraciones y el algoritmo de GEG el algoritmo se detiene después de mantener la estabilidad de los resultados por lapso prolongado.

39
Este resultado y comportamiento de los algoritmos se mantiene de forma muy similar
para los receptores 01, 03, 04, 05, 06, 07 en el receptor 09 ubicado en una de las
esquinas del medio solo en el algoritmo de GEG se logra la convergencia por la norma
del gradiente, no así para el algoritmo de B&B, esto se puede apreciar en la grafica que se muestra a continuación (Figura 9).
En la grafica de la Figura (9b) se aprecia como el algoritmo GEG converge a 0,000078 en
296 iteraciones, mientras que el algoritmo de B&B Figura (9a) se detiene al cumplirse el número máximo de iteraciones permitidas.
De un primer análisis que se desprende de todas las graficas que se presentaron sobre el
algoritmo de B&B se puede decir que la forma del paso que se implementa en este
algoritmo para la búsqueda del mínimo, en el caso particular de las ecuaciones que
definen el tiempo de viaje (ecuación 21), producen tal irregularidad en los saltos que se
obtienen en la búsqueda de la convergencia que no nos permite garantizar que el
resultado obtenido resulta efectivamente un mínimo local de tiempo de viaje.
Con respecto al algoritmo de GEG podemos afirmar de los resultados de las graficas que
a pesar de que en algunos casos no se logra la convergencia esperada, si se puede decir
que en todos esos casos la condición de parada se dio por la estabilidad del
comportamiento del algoritmo en un lapso prolongado. En todos los casos estudiados el
tiempo de ejecución del algoritmo GEG resulto menor que el de B&B.
Conclusiones
Las pruebas realizadas permiten afirmar que el algoritmo se desempeña de manera
satisfactoria en los diferentes tipos de medios que van desde medios simples, como lo

40
son los medios isotrópicos, hasta medios que puedan representar complicados modelos geofísicos con características anisotrópicas heterogéneas.
El desempeño obtenido por el algoritmo de Gradiente Espectral Globalizado GEG con
respecto al de Barzilai y Borwein B&B es satisfactorio ya que logra minimizar los tiempos
de respuesta del trazador y garantiza la convergencia del algoritmo.
Referencias Bibliográficas
1. Reyes C., Aldo E. “Algoritmo trazador de rayos sísmico en medios heterogéneos
débilmente anisotrópicos usando técnicas de optimización no lineal”, Tesis de Maestría,
Dpto. de Computación, Universidad Central de Venezuela, Caracas, Venezuela (1999).
2. Raydan M. “The Barzilai and Borwein gradient method for the large scale
unconstrained minimization problem”. SIAM J Opt 7: (1997). 26-33.
3. Wesson R.L. “Travel-time inversion for laterally inhomogeneous crustal velocity
model” . Bull Seism Soc Am 61: (1997). 729-746.
4. Chander. R. “On tracing seismic rays with specified end points”. Journal Geophys, 41:
(1975). 173-177.
5. Julian B.R and Gubbins D. “Three-dimensional seismic ray tracing” . Journal Geophys,
43: (1977). 59-67.
6. Thomsen L. “Weak elastic anisotropy”. Geophysics, 51: (1986). 10.
7. Daley P.F and Hron F. “Reflection and transmission coefficients for transversely
isotropic media”. Bulletin of the Seismological Society of America, 67: (1977). 661-675.
8. Vernaez G. “Optimización de un trazador de rayos sísmico con técnicas de
globalización y herramientas de visualización”. Msc. Tesís, Universidad Central de
Venezuela, Venezuela. (2002).
9. Barzilai J and Borwein J.M. “Two point step size gradient methods”. IMA Journal of
Numerical Analysis, 8: (1988). 141-148.





























