Embed Size (px)
Citation preview

14 IEEE TRANSACTIONS ON RELIABILITY, VOL. R-24, NO. 1, APRIL 1975
Optimization of System Reliability- by a New Nonlinear IntegerProgramming Procedure
Rein Luus
Abstract-This paper presents a useful procedure of solving nonlinear subject to the constraintsinteger programming problems. It finds, first, a pseudo-solution to theproblem, as if the variables were continuous. Then it uses direct search xx).b.=12min the neighbourhood of the pseudo-solution to find the optimum. The I n
m
effectiveness of the method is shown with a 15-variable problem, whichrequires about I day's FORTRAN programming effort and 8 seconds xi , i 1, 2 ., n must be positive integers (2)of computer time for its solution on an IBM 370/165 digital computer.
The constraint functions g, need not be linear and the number
Pureader Aidens:ate of-the art.of inequality constraints m need not be less than n. A proce-Purpose: Widen state-of-the art. .
Special math needed for explanations: None dure involving three steps is proposed.Special math needed for results: NoneResults useful to: Design and reliability engineers, programmers.
SOLUTION TO THE GENERAL PROBLEM
Step 1: Solution to the Pseudo-ProblemINTRODUCTION
NCREASytheintroduction of redundancy Relax the condition of requiring each xi to be integer andiNCweAl.no r elaityby solve the maximization problem as if the variables were con-iS well known. However, the problem of how to optimize tnos nya prxmt ouini eesr oti
the reliability through the selection of redundancy has not yet seuo- Oblem.been adequately solved. Tillman and Liittschwager [1] pre- pseudo-problem.sented an integer programming formulation for the solution . .of reliability problems. The method requires transformationof the objective function and introduction of auxiliary variables. Take the values of x obtaiMisra [2] discusses the overall applicability of integer program- t i b
..~~ ~ ~~~~n onstraints bytruncation (toward zero) so that the inequalitying approach to solving reliability problems; later Misra [3] In- tontrs) are satisfied.troduces the use of Lagrange multipliers and the Maximum cntans()aestsid
trouciles th use oflgange .mutip n the M armu There may now be adequate slack in (1) to allow an increaseprinipl to olvrelabiityoptiizaion robems.Shama n at least one of the x-. Therefore, attempt to increment eachand Venkateswaran [4] presented a simpler method with no 1, ecktoe if (1)xi sTisfied,and incrementonl .heassurance of obtaining the true optimum. Banerjee and xi. hi . 'Rajamani [5] use the Lagrange multiplier approach to solve ch gives the greatest contribution to the maximization ofthe reliability problem to yield optimum or near optimum f. Continue this filling of slack until no xi can be incremented
without violating at least one of the constraints.results. Misra and Sharma [6] classified the methods into twogroups, one which includes methods which require simple form-ulation and yield approximate results and the other whichincludes methods which are complicated but yield an exact in-teger solution to the problem. These authors then provide a Carry othn(n 1)e were byonvarib is emengeometric programming formulation for the reliability problem by 1 and the others are decremented by in turn For examplewhich gives an approximate answer. Xsuppose x1 is incremented to x1 ± 1. Now decrement x2 to
The purpose of this paper is to present a method which is x2c-1 and check whether inequalities are satisfied. If so, theneasy to formulate and which gives an optimum for the reli- calculate the corresponding value off and compare that value toability optimization problem. Although there is no assurance the maximum f in Step 2. If the most recently calculated fisof obtaining the global optimum, in practical problems the greater, then retain in the memory the fact that xl incrementedmethod will come very close to finding the global optimum. by 1 and x2 decremented by 1 gives a better value. However,
before making a change in this variable, continue through theentire cycle up to x, . Then choose the set x. which has given
PROBLEMFORMULATION ~~the greatest value for f. Perform the cycle by incrementing x2Maximize a nonlinear function of n variables denoted by and continue with X3, X4, etc. up to x,n. In total, there are
thus a maximum. of n(n -1) tests to be done. The set givingf(x1, x2,.,xn) the largest value offis retained as the optimum.
LUUS:NEW NONLINEAR INTEGER PROGRAMMING PROCEDURE 15
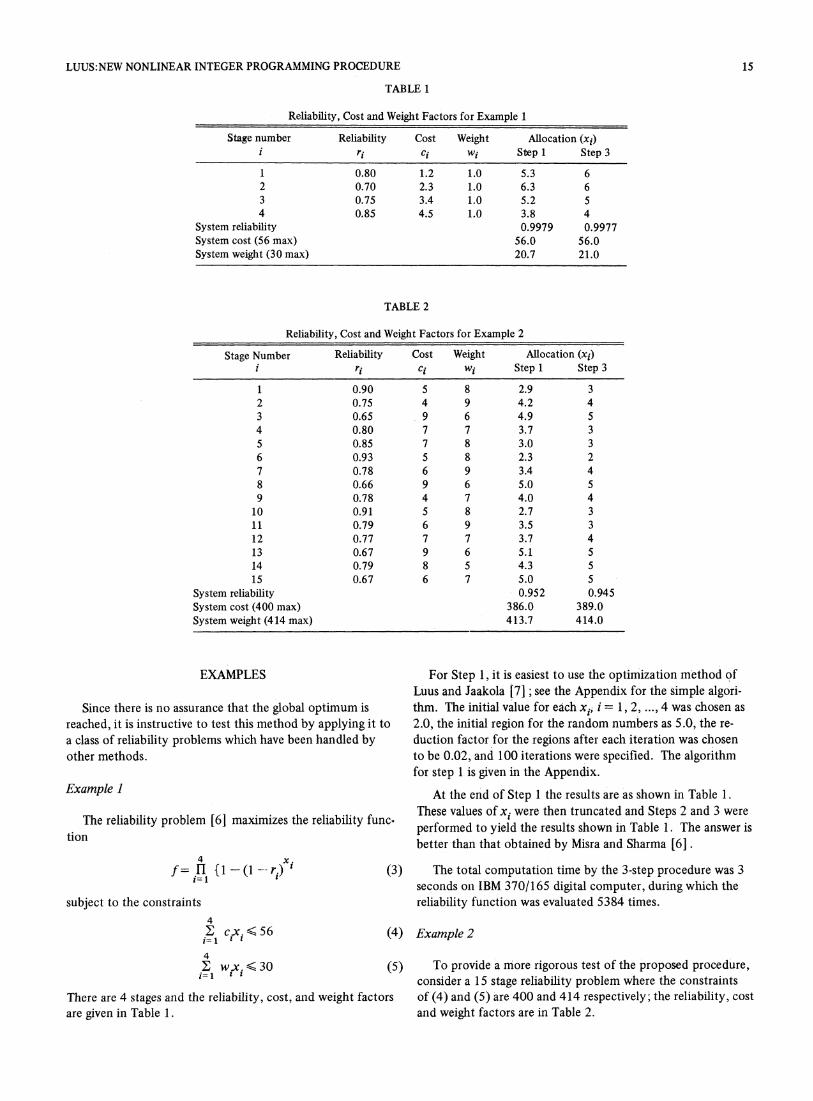
TABLE 1
Reliability, Cost and Weight Factors for Example 1
Stage number Reliability Cost Weight Allocation (xi)i ri Ci Wi Step 1 Step 3
1 0.80 1.2 1.0 5.3 62 0.70 2.3 1.0 6.3 63 0.75 3.4 1.0 5.2 54 0.85 4.5 1.0 3.8 4
System reliability 0.9979 0.9977System cost (56 max) 56.0 56.0System weight (30 max) 20.7 21.0
TABLE 2
Reliability, Cost and Weight Factors for Example 2
Stage Number Reliability Cost Weight Allocation (xi)ri ci wi Step 1 Step 3
1 0.90 5 8 2.9 32 0.75 4 9 4.2 43 0.65 9 6 4.9 54 0.80 7 7 3.7 35 0.85 7 8 3.0 36 0.93 5 8 2.3 27 0.78 6 9 3.4 48 0.66 9 6 5.0 59 0.78 4 7 4.0 410 0.91 5 8 2.7 311 0.79 6 9 3.5 312 0.77 7 7 3.7 413 0.67 9 6 5.1 514 0.79 8 5 4.3 515 0.67 6 7 5.0 5
System reliability 0.952 0.945System cost (400 max) 386.0 389.0System weight (414 max) 413.7 414.0
EXAMPLES For Step 1, it is easiest to use the optimization method ofLuus and Jaakola [7] ; see the Appendix for the simple algori-
Since there is no assurance that the global optimum is thm. The initial value for eachxi;i-1, 2,...,4was chosen asreached, it is instructive to test this method by applying it to 2.0, the initial region for the random numbers as 5.0, the re-a class of reliability problems which have been handled by duction factor for the regions after each iteration was chosenother methods. to be 0.02, and 100 iterations were specified. The algorithm
for step 1 is given in the Appendix.Example 1 At the end of Step 1 the results are as shown in Table 1.
The reliability problem [6] maximizes the reliability func- These values of xi were then truncated and Steps 2 and 3 wereperformed to yield the results shown in Table 1. The answer isbetter than that obtained by Misra and Sharma [6].
4 xf= 11 {1 (-ri) i (3) The total computation time by the 3-step procedure was 3
seconds on IBM 370/165 digital computer, during which thesubject to the constraints reliability function was evaluated 5384 times.
4iS cx..<56 (4) Example 2
z wx. < 30 (5) To provide a more rigorous test of the proposed procedure,i= 1 consider a 15 stage reliability problem where the constraints
There are 4 stages and the reliability, cost, and weight factors of (4) and (5) are 400 and 414 respectively; the reliability, costare given in Table 1. and weight factors are in Table 2.

16 IEEE TRANSACTIONS ON RELIABILITY, APRIL 1975
Exactly the same computational procedure as in Example 1 Notation:was used. The results after Steps 1 and 3 are given in Table 2.The total number of function evaluations was 5362 and the x the set of xi which are the unknownscomputation time was 7.8 seconds. x*(i) the center value of x at iteration j which corresponds to
the best value of x at iteration j- 1.
DISCUSSION r(i) the set of r1 which are the ranges for direct search atiteration j; the direct search for xi is over the range.
The negligible computation time for the 15 stage reliability x -*()-0.5 r.(i) < x < x.*(i) + 0.5 rP)problem shows that the proposed method is very useful for Esolving reliability problems where discrete units are specified.To emphasize that the recommended procedure does not in- y a pseudo random number, uniform over the range -0.5volve exhaustive enumeration requires only a very simple calcu- to 0.5lation. Suppose we look at the possibility of having either 1, 2, n total number of iterations, e.g. n = 1003, 4 or 5 units at each of the 15 stages. To evaluate all possibili- P number of random trials for each iteration, e.g. p = 100ties would require 515 = 3 X 1010 calculations, which is an e the small number by which the range is reduced for eachimmense, completely impractical number. iteration, e.g. e = 0.02
ACKNOWLEDGMENTS Algorithm:
This work was performed with the assistance of a grant from 0. Choose initial values x*(l) and r(i), set j = 1.the National Research Council of Canada, A-3515. Computa- 1 Calculate p sets = xi*()+yri);yisanewpseudotions were performed with the facilities of the University of random number for each calculation.Toronto Computer Centre. 2. Test the inequality constraints, retain only those x(i) that
satisfy the constraints. Calculate the objective function foreach retained x(l).
REFERENCES 3. Find the x(i) which maximizes the objective function. Call
[11 F.A. Tillman and J.M Liittschwager, "Integer Programming Formu- it X*i), the center value for next iteration. If the maximumlation of Constrained Reliability Problems", Management Science, number of iterations is reached, stop.Vol. 13, pp. 887-899, July 1967. 4. Calculate r(il) = (1 - e)r(i). Increment j and go to Step 1.
[21 K.B. Misra, "A Method of Solving Redundancy Optimization ProWlems", IEEE Trans. Rel., Vol. R-20, pp. 117-120, August 1971.
[3] K.B. Misra, "Reliability Optimization of a Series-Parallel System", Rein Luus/Department of Chemical Engineering/University of Toronto/IEEE Trans. Rel., Vol. R-21, pp. 230-238, November 1972. Toronto, Ontario M5S IA4/ CANADA.
[4] J. Sharma and K.V. Venkateswaran, "A Direct Method for Maxi-mizing the System Reliability", IEEE Trans. Re!., Vol. R20, PP. Rein Luus was born in Tartu, Estonia on March 8, 1939. He received256-259, November 1971. the B.A. Sc. degree in Engineering Physics at University of Toronto,
[5] S.K. Banerjee and K. Rajamani, "Optimization of System Reliabil- Canada, in 1961 M.A. Sc. degree in 1962. At Princeton University heity Using a Parametric Approach", IEEE Trans. Rel., Vol. R-22, received the A.M. degree in 1963 and Ph.D. degree in chemical engineer-pp. 35-39, April 1973. ing in 1964.
[6] K.B. Misra and J. Sharma, "A New Geometric Programming Formu- During 1964-65 he was a postdoctorate fellow at Princeton where helation for a Reliability Problem", nt. J. Control, Vol. 18, PP. 4 wrote (with Professor Lapidus) Optimal Control ofEngineeringProcesses,503, September 1973. Blaisdell, 1967. Since 1965 he has been on the staff of the chemical en-
[7] R. Luus and T.H.I. Jaakola, "4OptimIlization by Direct Search and gineering department at University of Toronto, where at present he is aSystematic Reduction of the Size of Search Region"', AIChE J., professor. He is author of about 40 publications in refered journals andVol. 19, pp. 760-766, July 1973. 12 confidential technical reports resulting from his consulting activities
with Shell Canada and Milltronics Ltd.APPENDIX His main interests are in the fields of nonlinear analysis, optimization
and control. He is a member of Sigma Xi and a fellow of the Chemical
Algorithm for Direct Random Search and Interval Reduction Institute of Canada.[Equality constraints are presumed to have been eliminated] Manuscript received December 1, 1973; revised May 28, 1974 and[71 September 30, 1974.





























