-
7/29/2019 Optimization Theory Lecture 2
1/44
uol-new
Basic Principles
Engineering Optimization (EEE614)Lecture 2: Basic Principles
Dr. Shafayat Abrar
Signal Processing Research GroupCommunications Research
Group
Department of Electrical EngineeringCOMSATS Institute of IT,
Pakistan
Email: [email protected]
Spring 2013Textbook: Practical Optimization: Algorithms and
Engineering Applications,
A. Antoniou and W.-S. Lu, Springer, 2007.
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
http://find/http://goback/
-
7/29/2019 Optimization Theory Lecture 2
2/44
uol-new
Basic Principles
Problem Definition of Nonlinear Optimization
We focus our attention on the nonlinear optimization problem
minimize F = f(x)
subject to : x R (1)
where f(x) is a real-valued function, R En is the feasible
region, andE
n
represents the n-dimensional Euclidean space.
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
http://find/
-
7/29/2019 Optimization Theory Lecture 2
3/44
uol-new
Basic Principles
Problem Definition of Nonlinear Optimization
We focus our attention on the nonlinear optimization problem
minimize F = f(x)
subject to : x R (1)
where f(x) is a real-valued function, R En is the feasible
region, andE
n
represents the n-dimensional Euclidean space.
Note that x can be expressed as a column vector with elementsx1,
x2, , xn; the transpose of x, namely, xT, is a row vector
xT = [x1 x2 xn]
So the variables x1, x2, , xn are the parameters that influence
the costf(x). The optimization problem is to adjust variables x1,
x2, , xn insuch a way as to minimize the scalar-valued quantity F =
f(x).
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
http://find/
-
7/29/2019 Optimization Theory Lecture 2
4/44
uol-new
Basic Principles
Gradient Information
In many optimization methods, gradient information pertaining to
theobjective function is required for the evaluation (or
computation) ofminima.
This information consists of the first and second derivatives of
f(x) withrespect to the n variables.
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
http://find/
-
7/29/2019 Optimization Theory Lecture 2
5/44
uol-new
Basic Principles
Gradient Information
In many optimization methods, gradient information pertaining to
theobjective function is required for the evaluation (or
computation) ofminima.
This information consists of the first and second derivatives of
f(x) withrespect to the n variables.
If f(x)
C1, that is, if f(x) has continuous first-order partial
derivatives,then the gradient of f(x) is defined as
g(x) =
f
x1
f
x2 f
xn
T:= f(x)
(2)
where is gradient operator, viz
:=
x1
x2
xn
T
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
B P l
http://find/
-
7/29/2019 Optimization Theory Lecture 2
6/44
uol-new
Basic Principles
Gradient Information
In vector calculus, the gradient of a scalar field is a vector
field thatpoints in the direction of the greatest rate of increase
of the scalar field,and whose magnitude is that rate of
increase.
In simple terms, the variation in space of any quantity can be
represented(e.g. graphically) by a slope. The gradient represents
the steepness anddirection of that slope.
Note: We can numerically compute the gradient of any function
f(x, y)with respect to x and y using gradient.m and plot using
quiver.m.
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
B i P i i l
http://find/
-
7/29/2019 Optimization Theory Lecture 2
7/44
uol-new
Basic Principles
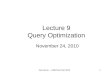
Consider a function f(x, y) = xexp(x2 y2).
2
1
0
1
2
1
0
1
0.40.2
00.20.4
Surface Plot
Contour Plot
1 0 11
0
1
2 1 0 1 21
0.5
0
0.5
1
Quiver Plot
x
y
QuiverContour Plot
x
y
2 1 0 1 21
0.5
0
0.5
1
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
B si P i i les
http://find/
-
7/29/2019 Optimization Theory Lecture 2
8/44
uol-new
Basic Principles
MATLAB Code:
[x,y] = meshgrid(-2:0.1:2,-1:0.1:1);
z = x .* exp(-x.^2 - y.^2);[px,py] = gradient(z,.1,.1);
mi = min(min(z)); ma = max(max(z));
slices = mi:(ma-mi)/20:ma;
subplot(2,2,1); surf(x,y,z), axis image
title(Surface Plot,fontsize,14)
axis tight; subplot(2,2,2);cs =
contour(x,y,z,slices,linewidth,2);
axis image; title(Contour Plot,fontsize,14)
subplot(2,2,3); qv=quiver(x,y,px,py);
set(qv,linewidth,1); axis image
title(Quiver Plot,fontsize,14)
subplot(2,2,4); contour(x,y,z,slices,linewidth,1);
hold on; qv=quiver(x,y,px,py);
set(qv,linewidth,1); hold off, axis image
title(Quiver-Contour Plot,fontsize,14)
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
9/44
uol-new
Basic Principles
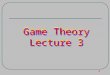
For the function f(x, y) = xexp(x2 y2).QuiverContour Plot
2 1.5 1 0.5 0 0.5 1 1.5 22
1.5
1
0.5
0
0.5
1
1.5
2
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
10/44
uol-new
Basic Principles
Note
To minimize a function in an iterative or adaptive
fashion, it is necessary to follow the directionopposite to the
direction of gradient.
We will discuss this issue in detail in Chapter 5.
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
Basic Principles
http://find/http://goback/
-
7/29/2019 Optimization Theory Lecture 2
11/44
uol-new
Basic Principles
Gradient Information
If f(x)
C2, that is, if f(x) has continuous second-order partial
derivatives, then the Hessian of f(x) is defined as
H(x) = gT = Tf(x)
=
2 f
x21
2f
x1x2 2f
x1xn
2 f
x2x
1
2f
x
2
2
2fx
2x
n...
......
2 f
xnx1
2f
xnx2 2f
x2n
(3)
For a function f(x) C2, we have2f
xjxi=
2f
xixj
since differentiation is a linear operation and hence H(x) is an
n nsquare symmetric matrix.
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
12/44
uol-new
Basic Principles
Gradient InformationHence, the Hessian matrix (or simply the
Hessian) is a square matrix ofsecond-order partial derivatives of a
function. Mathematically, it describesthe local curvature of a
function of many variables.
The Hessian matrix was developed in the 19th century by the
Germanmathematician Ludwig Otto Hesse and later named after him.
Hessehimself had used the term functional determinants.
There exist families of iterative optimization algorithms,
likequasi-Newton method, which use (inverse of) Hessian to
accelerate
their convergence speed.
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
13/44
uol-new
p
Taylor Series: for function of two variablesIf f(x) is a
function of two variables x1 and x2 such that f(x) Cp wherep, that
is, f(x) := f(x1, x2) has continuous partial derivatives of
allorders, then the value of function f(x) at point [x1 + 1, x2 +
2] is givenby the Taylor series as
f(x1 + 1, x2 + 2) = f(x1, x2) + 1 f(x1, x2)
x1+ 2 f(x
1, x2)x2
+1
2
21
2f(x1, x2)
x21+ 212
2f(x1, x2)
x1x2+ 22
2f(x1, x2)
x22
+ O(3)
(4)where O(
3) is the remainder, and
is the Euclidean norm of
= [1, 2]T given by = T = 21 + 22 .
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
Basic Principles
http://find/http://goback/
-
7/29/2019 Optimization Theory Lecture 2
14/44
uol-new
Oh notations
The notation (x) = O(x) denotes that (x) approaches zero at
least as fast as
x, as x approaches zero, that is, there exists a constant K 0
such that(x)x K as x 0
The notation (x) = o(x) denotes that (x) approaches zero faster
than x, as xapproaches zero, that is, there exists a constant K 0
such that
(x)x 0 as x 0
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
15/44
uol-new
Oh notations
The notation (x) = O(x) denotes that (x) approaches zero at
least as fast as
x, as x approaches zero, that is, there exists a constant K 0
such that(x)x K as x 0
The notation (x) = o(x) denotes that (x) approaches zero faster
than x, as xapproaches zero, that is, there exists a constant K 0
such that
(x)x 0 as x 0f(x1 + 1, x2 + 2) = f(x1, x2) + 1
f(x1, x2)
x1+ 2
f(x1, x2)
x2
+1
2 21
2f(x1, x2)
x21+ 212
2f(x1, x2)
x1x2+ 22
2f(x1, x2)
x22 + O(3)
= f(x1, x2) + 1f(x1, x2)
x1+ 2
f(x1, x2)
x2
+1
2
21
2f(x1, x2)
x21+ 212
2f(x1, x2)
x1x2+ 22
2f(x1, x2)
x22
+ o(2)
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
16/44
uol-new
Taylor Series: for function ofn variables
f(x1 + 1, x2 + 2, , xn + n)
= f(x1, x2, , xn) +n
i=1
if
xi+
ni=1
nj=1
ij
2
2f
xixj+ o(2)
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/http://goback/
-
7/29/2019 Optimization Theory Lecture 2
17/44
uol-new
Taylor Series: for function ofn variables
f(x1 + 1, x2 + 2, , xn + n)
= f(x1, x2, , xn) +n
i=1
if
xi+
ni=1
nj=1
ij
2
2f
xixj+ o(2)
Taylor Series in matrix form
f(x + ) = f(x) + g(x)T +1
2
TH(x) + o(2)
where g(x) is the gradient, and H(x) is the Hessian at point
x.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
18/44
uol-new
Taylor Series: for function ofn variables
f(x1 + 1, x2 + 2, , xn + n)
= f(x1, x2, , xn) +n
i=1
if
xi+
ni=1
nj=1
ij
2
2f
xixj+ o(2)
Taylor Series in matrix form
f(x + ) = f(x) + g(x)T +1
2
TH(x) + o(2)
where g(x) is the gradient, and H(x) is the Hessian at point
x.
Later, we will discuss the use of Taylors expansion in
optimization.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
19/44
uol-new
Types of Extrema
The extrema of a function are its minima and maxima.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
20/44
uol-new
Types of Extrema
The extrema of a function are its minima and maxima.
Points at which a function has minima (maxima) are said to
beminimizers (maximizers).
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
21/44
uol-new
Types of Extrema
The extrema of a function are its minima and maxima.
Points at which a function has minima (maxima) are said to
beminimizers (maximizers).
Several types of minimizers (maximizers) can be distinguished,
namely,local or global and weak or strong.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
22/44
uol-new
Types of Extrema
The extrema of a function are its minima and maxima.
Points at which a function has minima (maxima) are said to
beminimizers (maximizers).
Several types of minimizers (maximizers) can be distinguished,
namely,local or global and weak or strong.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
23/44
uol-new
In the general optimization problem, we are in principle seeking
the globalminimum (or maximum) of f(x). In practice, an
optimization problemmay have two or more local minima.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
24/44
uol-new
In the general optimization problem, we are in principle seeking
the globalminimum (or maximum) of f(x). In practice, an
optimization problemmay have two or more local minima.
Since optimization algorithms in general are iterative
procedures whichstart with an initial estimate of the solution and
converge to a singlesolution, one or more local minima may be
missed. If the global minimumis missed, a suboptimal solution will
be achieved, which may or may notbe acceptable.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
25/44
uol-new
In the general optimization problem, we are in principle seeking
the globalminimum (or maximum) of f(x). In practice, an
optimization problemmay have two or more local minima.
Since optimization algorithms in general are iterative
procedures whichstart with an initial estimate of the solution and
converge to a singlesolution, one or more local minima may be
missed. If the global minimumis missed, a suboptimal solution will
be achieved, which may or may notbe acceptable.
This problem can to some extent be overcome by performing
theoptimization several times using a different initial estimate
for the solutionin each case in the hope that several distinct
local minima will be located.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
26/44
uol-new
In the general optimization problem, we are in principle seeking
the globalminimum (or maximum) of f(x). In practice, an
optimization problemmay have two or more local minima.
Since optimization algorithms in general are iterative
procedures whichstart with an initial estimate of the solution and
converge to a singlesolution, one or more local minima may be
missed. If the global minimumis missed, a suboptimal solution will
be achieved, which may or may notbe acceptable.
This problem can to some extent be overcome by performing
theoptimization several times using a different initial estimate
for the solutionin each case in the hope that several distinct
local minima will be located.
If this approach is successful, the best minimizer, namely, the
one yieldingthe lowest value for the objective function can be
selected. Although sucha solution could be acceptable from a
practical point of view, usuallythere is no guarantee that the
global minimum will be achieved.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
27/44
uol-new
In the general optimization problem, we are in principle seeking
the globalminimum (or maximum) of f(x). In practice, an
optimization problemmay have two or more local minima.
Since optimization algorithms in general are iterative
procedures whichstart with an initial estimate of the solution and
converge to a singlesolution, one or more local minima may be
missed. If the global minimumis missed, a suboptimal solution will
be achieved, which may or may notbe acceptable.
This problem can to some extent be overcome by performing
theoptimization several times using a different initial estimate
for the solutionin each case in the hope that several distinct
local minima will be located.
If this approach is successful, the best minimizer, namely, the
one yieldingthe lowest value for the objective function can be
selected. Although sucha solution could be acceptable from a
practical point of view, usuallythere is no guarantee that the
global minimum will be achieved.
Therefore, for the sake of convenience, the term minimize f(x)
in thegeneral optimization problem will be interpreted as find a
localminimum of f(x).
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
28/44
uol-new
Good News: In a specific class of problems where function
f(x)and set R satisfy certain convexity properties, any local
minimumof f(x) is also a global minimum of f(x). In this class of
problems
an optimal solution can be assured.
These problems will be examined in Section 2.7.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
29/44
uol-new
Definition 2.1: Weak local minimizer
A point x R, where R is the feasible region, is said to be a
weak localminimizer of f(x) if there exists a distance > 0 such
that f(x)
f(x) if
x R and x x <
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
30/44
uol-new
Definition 2.1: Weak local minimizer
A point x R, where R is the feasible region, is said to be a
weak localminimizer of f(x) if there exists a distance > 0 such
that f(x)
f(x) if
x R and x x <
Definition 2.2: Weak global minimizer
A point x R is said to be a weak global minimizer of f(x) if
f(x) f(x
) for all x R
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
31/44
uol-new
Definition 2.1: Weak local minimizer
A point x R, where R is the feasible region, is said to be a
weak localminimizer of f(x) if there exists a distance > 0 such
that f(x)
f(x) if
x R and x x <
Definition 2.2: Weak global minimizer
A point x R is said to be a weak global minimizer of f(x) if
f(x) f(x
) for all x R
Definition 2.3(a): Strong local minimizer
A point x R is said to be a strong local minimizer of f(x) if
there exists adistance > 0 such that f(x) > f(x) if x
Rand
x
x
<
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
32/44
uol-new
Definition 2.1: Weak local minimizer
A point x R, where R is the feasible region, is said to be a
weak localminimizer of f(x) if there exists a distance > 0 such
that f(x)
f(x) if
x R and x x <
Definition 2.2: Weak global minimizer
A point x R is said to be a weak global minimizer of f(x) if
f(x) f(x
) for all x R
Definition 2.3(a): Strong local minimizer
A point x R is said to be a strong local minimizer of f(x) if
there exists adistance > 0 such that f(x) > f(x) if x R and x
x <
Definition 2.3(b): Strong global minimizer
A point x R is said to be a strong global minimizer of f(x)
iff(x) > f(x) for all x R
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
N d S ffi i C di i f L l Mi i d M i
http://find/
-
7/29/2019 Optimization Theory Lecture 2
33/44
uol-new
Necessary and Sufficient Conditions for Local Minima and
Maxima
The gradient g(x) and the Hessian H(x) must satisfy certain
conditionsat a local minimizer x.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
N d S ffi i C di i f L l Mi i d M i
http://find/
-
7/29/2019 Optimization Theory Lecture 2
34/44
uol-new
Necessary and Sufficient Conditions for Local Minima and
Maxima
The gradient g(x) and the Hessian H(x) must satisfy certain
conditionsat a local minimizer x.
Two sets of conditions will be discussed, as follows:1
Conditions which are satisfied at a local minimizer x. These
are the necessary conditions.2 Conditions which guarantee that x
is a local minimizer. These
are the sufficient conditions.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
N d S ffi i t C diti f L l Mi i d M i
http://find/
-
7/29/2019 Optimization Theory Lecture 2
35/44
uol-new
Necessary and Sufficient Conditions for Local Minima and
Maxima
The gradient g(x) and the Hessian H(x) must satisfy certain
conditionsat a local minimizer x.
Two sets of conditions will be discussed, as follows:1
Conditions which are satisfied at a local minimizer x. These
are the necessary conditions.2 Conditions which guarantee that x
is a local minimizer. These
are the sufficient conditions.
A concept that is used extensively in these theorems is the
concept of afeasible direction.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
Necessary and Sufficient Conditions for Local Minima and
Maxima
http://find/
-
7/29/2019 Optimization Theory Lecture 2
36/44
uol-new
Necessary and Sufficient Conditions for Local Minima and
Maxima
The gradient g(x) and the Hessian H(x) must satisfy certain
conditionsat a local minimizer x.
Two sets of conditions will be discussed, as follows:1
Conditions which are satisfied at a local minimizer x. These
are the necessary conditions.2 Conditions which guarantee that x
is a local minimizer. These
are the sufficient conditions.
A concept that is used extensively in these theorems is the
concept of afeasible direction.Definition 2.4: Feasible
Direction
Let = d be a change in x where is a positive constant and d is a
directionvector. IfR is the feasible region and a constant
> 0 exists such that
x + d R in the range 0 , then d is said to be a feasible
direction at point x.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
Necessary and Sufficient Conditions for Local Minima and
Maxima
http://find/
-
7/29/2019 Optimization Theory Lecture 2
37/44
uol-new
Necessary and Sufficient Conditions for Local Minima and
Maxima
The gradient g(x) and the Hessian H(x) must satisfy certain
conditionsat a local minimizer x.
Two sets of conditions will be discussed, as follows:1
Conditions which are satisfied at a local minimizer x. These
are the necessary conditions.2 Conditions which guarantee that x
is a local minimizer. These
are the sufficient conditions.
A concept that is used extensively in these theorems is the
concept of afeasible direction.Definition 2.4: Feasible
Direction
Let = d be a change in x where is a positive constant and d is a
directionvector. IfR is the feasible region and a constant
> 0 exists such that
x + d R in the range 0 , then d is said to be a feasible
direction at point x.In simple words, if a point x remains in R
after it is moved a finite distance ina direction d, then d is a
feasible direction vector at x.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
E l 2 2
http://find/
-
7/29/2019 Optimization Theory Lecture 2
38/44
uol-new
Example 2.2
Suppose the feasible region is given by
R = {x : x1 2, x2 0}Which of the vectors d1 = [2 2]T, d2 = [0
2]T, d3 = [2 0]T arefeasible directions at x1 = [4 1]
T, x2 = [2 3]T, x3 = [1 4]
T?
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
39/44
uol-new
Theorem 2.1 First-Order Necessary Conditions for a Minimum(a) If
f(x) C1 and x is a local minimizer, then
g(x)Td 0for every feasible direction d at x.
(b) If x
is located in the interior ofR theng(x) = 0
Proof
Proof is provided on white board. (Available in book)
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
40/44
uol-new
Definition 2.5
(a) Let d be an arbitrary direction vector at point x. The
quadratic formdTH(x)d is said to be positive definite, positive
semidefinite, negativesemidefinite, negative definite if dTH(x)d
> 0, 0, 0, < 0,respectively, for all d = 0 at x. If d
T
H(x)d can assume positive as well asnegative values, it is said
to be indefinite.
(b) If dTH(x)d is positive definite, positive semidefinite,
etc., then matrixH(x) is said to be positive definite, positive
semidefinite, etc.
Dr. Shafayat Abrar COMSATS Institute of IT, PakistanEngineering
Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
41/44
uol-new
Theorem 2.2 Second-Order Necessary Conditions for a Minimum
(a) If f(x) C2 and x is a local minimizer, then for every
feasible directiond at x.
1 g(x)Td 02 If g(x)Td = 0, then dTH(x)d 0
(b) If x
is a local minimizer in the interior ofR, then1 g(x) = 02 d
TH(x)d 0 for all d = 0
Proof
Proof is provided on white board. (Available in book)
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
42/44
uol-new
Theorem 2.4 Second-Order Sufficient Conditions for a Minimum
If f(x) C2 and x is located in the interior ofR, then
theconditions
1 g(x) = 0
2 H(x
) is positive definiteare sufficient for x to be a strong local
minimizer.
Proof
Proof is provided on white board. (Available in book)
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
43/44
uol-new
Example 2.3
Discussed on white board. (Available in book)
Example 2.4Discussed on white board. (Available in book)
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
Basic Principles
http://find/
-
7/29/2019 Optimization Theory Lecture 2
44/44
uol-new
In the next lecture, we will discuss the remaining parts of
Chapter 2 including
Classifications of Stationary Points
Convex and Concave Functions
Optimization of Convex Functions
See you next time. Thank you for your attention.
Dr. Shafayat Abrar COMSATS Institute of IT, Pakistan
Engineering Optimization (EEE614): Lecture 2
http://find/