Upload
meteostroy
View
248
Download
0
Embed Size (px)
Citation preview
VIENNA UNIVERSITY OF TECHNOLOGY
OPTIMIZING BASESTATION SITING
IN UMTS NETWORKS
By
Schonhofer Martin
Bennogasse 11/11
1080 Vienna
SUBMITTED IN PARTIAL FULFILLMENT OF THEREQUIREMENTS FOR THE DEGREE OF
DIPLOM INGENIEURAT
VIENNA UNIVERSITY OF TECHNOLOGYA-1040 Vienna, GUSSHAUSSTRASSE 25-29
JULY 2005
Copyright by Schonhofer Martin, 2005
5 IT MAY BE PRINTED OR OTHERWISE REPRODUCEDWITHOUT THEAUTOHRS WRITTEN PERMISSION.
2VIENNA UNIVERSITY OF TECHNOLOGY
Date: July 2005
Author: Schnhofer Martin
f i t le: Optimizing Basestation Siting in UMTS Networks
Department: Institut of Communications and Radio-F'requency Engineering
Degree: Dipl.Ing. Convocation: July Year: 2005
Permission is herewith granted to the Vienna University of Technology to circu- hte an to have copied for non-commercial purposes, at its discretion, the above titk upon the request of individuals or institutions.
Signature of Author
M E AUTHOR RESERVES OTHER PUBLICATION RIGHTS; AND NEITHER M E THESIS NOR EXTENSIVE EXTRACTS FROM IT MAY BE PRINTED OR OTHERIF'ISE REPRODUCED WITHOUT THE AUTOHR'S WRITTEN PERMIS- SIOS.
M E AUTHOR ATTESTS THAT PERMISSION HAS BEEN OBAINED FOR USE OF .LW COPYRIGHTED MATERIAL APPEARJNG IN THIS THESIS (OTHER THXY BRIEF EXCERPTS REQUIRING ONLY PROPER ACKNOWLEDGEMENT I'; SCHOLARY WRITING) AND THAT ALL SUCH USE IS CLEARLY ACKNOW- LEDGED.
3
1Danksagung
An dieser Stelle mochte ich allen danken, die durch ihre fachliche undpersonliche Unterstutzung zum Gelingen dieser Diplomarbeit beigetragenhaben.
Herrn Dr. Alexander Gerdenitsch danke ich fur sein Engagement und sei-ne Geduld bei unzahligen Fragen rund um die Optimierungs-Algorithmen.
Vielen Dank auch an Herrn Univ. Prof. Dr. Ernst Bonek, der die Ar-beit benotet hat.
Gewidmet ist die Arbeit meinen Eltern, die mich immer selbstlos un-terstutzt und mir das Studium erst ermoglicht haben.
Martin Schonhofer 25. Juli 2005
2Abstract
This diploma thesis deals with the optimization of the base station sitingproblem in UMTS networks. Therefore, a software designed for WindowsXP was developed with Visual Studio .Net (C++). The aim was to reducethe number of base stations under the restriction that a required coveragehas to be fulfilled.
For calculating the coverage, a model for the network evaluation has tobe found. Therefore, the Radio Link Budget was extended in a way thatthe resulting cell radii can be calculated out of the number of subscribersand the service-mix (this relation is called cell-breathing).
In this thesis, two algorithms for optimizing the number of base stationsare presented. Both algorithms, Tabu Search and Genetic Algorithm, areheuristic optimization techniques and well suited for this kind of problem.
The performance of the algorithms are evaluated on a reference scenario(MORANS, scenario Vienna). The results show that a reduction of morethen 50% of the sector-antennas is possible.
Tabu Search offers the best results, but has the disadvantage of higherexecution times. The Genetic Algorithm offers significant worse results,however needs a lower runtime.
CONTENTS 3
Contents
Acknowledgments 1
Abstract 2
List of Tables 6
List of Figures 7
1 Introduction 9
1.1 The Network Planing Process . . . . . . . . . . . . . . . . 9
1.1.1 Initial Planning . . . . . . . . . . . . . . . . . . . . 9
1.1.2 Optimization . . . . . . . . . . . . . . . . . . . . . 10
1.2 Description of the Automating Process . . . . . . . . . . . 10
2 Network Evaluation Model 13
2.1 RLB vs. Static Simulation vs. Dynamic Simulation . . . . 13
2.1.1 Radio Link Budget . . . . . . . . . . . . . . . . . . 13
2.1.2 Static Simulation . . . . . . . . . . . . . . . . . . . 13
2.1.3 Dynamic Simulation . . . . . . . . . . . . . . . . . 15
2.1.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . 15
2.2 Integration of Service Mix . . . . . . . . . . . . . . . . . . 15
2.2.1 Uplink Load Factor . . . . . . . . . . . . . . . . . . 16
2.2.2 Downlink Load Factor . . . . . . . . . . . . . . . . 17
2.2.3 RLB and Service Mix . . . . . . . . . . . . . . . . . 18
2.2.4 Propagation Model . . . . . . . . . . . . . . . . . . 20
2.2.5 Network Evaluation Using Cell Radii . . . . . . . . 22
2.2.6 Network Evaluation Using Path Loss Data . . . . . 24
3 Optimization Algorithms 25
3.1 Genetic Algorithm . . . . . . . . . . . . . . . . . . . . . . 25
3.1.1 Motivation for the Use of Genetic Algorithms . . . 25
3.1.2 Biological Terminology . . . . . . . . . . . . . . . . 27
CONTENTS 4
3.1.3 Operators of Genetic Algorithms . . . . . . . . . . 28
3.1.3.1 Initialization . . . . . . . . . . . . . . . . 28
3.1.3.2 Selection . . . . . . . . . . . . . . . . . . 29
3.1.3.2.1 Roulette Wheel Selection . . . . 29
3.1.3.2.2 Tournament Selection . . . . . . 31
3.1.3.2.3 Elitism . . . . . . . . . . . . . . . 31
3.1.3.3 Genetic Operators . . . . . . . . . . . . . 32
3.1.3.3.1 Crossover (Recombination) . . . 32
3.1.3.3.2 Mutation . . . . . . . . . . . . . 33
3.1.3.3.3 Fitness Function . . . . . . . . . 33
3.1.3.4 Implementation of the GA for Optimizingthe Base Station Siting Problem . . . . . 34
3.2 Tabu Search . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2.1 Motivation for the Use of Tabu Search . . . . . . . 37
3.2.2 What is Tabu Search? . . . . . . . . . . . . . . . . 37
3.2.3 Strategies . . . . . . . . . . . . . . . . . . . . . . . 37
3.2.3.1 Forbidding Strategy . . . . . . . . . . . . 38
3.2.3.2 Aspiration Criteria and Tabu Restrictions 38
3.2.3.3 Freeing Strategy . . . . . . . . . . . . . . 40
3.2.3.4 Short-Term Strategy (Overall Strategy) . 40
3.2.4 Implementation of TS for Optimizing the Base Sta-tion Siting Problem . . . . . . . . . . . . . . . . . . 41
4 Scenarios 44
4.1 Selfgenerated Scenarios . . . . . . . . . . . . . . . . . . . . 44
4.2 MORANS Scenario . . . . . . . . . . . . . . . . . . . . . . 47
4.2.1 Layer 1 . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2.2 Layer 2 . . . . . . . . . . . . . . . . . . . . . . . . 47
4.2.3 Layer 5 . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2.4 Layer 6 . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2.5 Layer 7 . . . . . . . . . . . . . . . . . . . . . . . . 49
4.2.6 Additional Parameters . . . . . . . . . . . . . . . . 49
CONTENTS 5
5 Results 53
5.1 Simulation Conditions . . . . . . . . . . . . . . . . . . . . 53
5.2 Genetic Algorithm . . . . . . . . . . . . . . . . . . . . . . 54
5.2.1 Iterations . . . . . . . . . . . . . . . . . . . . . . . 54
5.2.2 Population Size . . . . . . . . . . . . . . . . . . . . 55
5.2.3 Initialization Probability . . . . . . . . . . . . . . . 57
5.2.4 Mutation Probability . . . . . . . . . . . . . . . . . 58
5.2.5 Recombination Probability . . . . . . . . . . . . . . 60
5.2.5.1 Uniform Crossover . . . . . . . . . . . . . 60
5.2.5.2 Multipoint Crossover . . . . . . . . . . . . 61
5.2.5.3 Uniform vs. Multipoint Crossover . . . . . 63
5.2.6 Selection Pressure Cm . . . . . . . . . . . . . . . . 65
5.2.7 Tournament Selection Factor k . . . . . . . . . . . 66
5.3 Tabu Search . . . . . . . . . . . . . . . . . . . . . . . . . . 68
5.3.1 Iterations . . . . . . . . . . . . . . . . . . . . . . . 68
5.3.2 Generation Probability . . . . . . . . . . . . . . . . 69
5.3.3 Neighbors . . . . . . . . . . . . . . . . . . . . . . . 71
5.3.4 Frequency Factor . . . . . . . . . . . . . . . . . . . 73
5.3.5 Recency Factor . . . . . . . . . . . . . . . . . . . . 74
5.3.6 Init Probability . . . . . . . . . . . . . . . . . . . . 76
5.4 t-Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5.5 Comparison . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.5.1 Results . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.5.2 Runtime of the algorithms . . . . . . . . . . . . . . 83
6 Algorithms 84
6.1 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . 84
6.2 Outlook . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Glossary 85
References 86
LIST OF TABLES 6
List of Tables
1 Example of a WCDMA RLB by Groupe des Ecoles desTelecommunications [17] . . . . . . . . . . . . . . . . . . . 14
2 Typical radio bearers . . . . . . . . . . . . . . . . . . . . . 15
3 Parameters used in uplink load factor calculation . . . . . 16
4 Parameters used in uplink load factor calculation . . . . . 17
5 Example of a advanced WCDMA RLB with 2 different ser-vice users . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6 RLB with service mix and propagation model . . . . . . . 21
7 Comparison of natural and GA terminology [13] . . . . . . 28
8 Simulation parameters . . . . . . . . . . . . . . . . . . . . 53
9 Simulation results Iterations GA . . . . . . . . . . . . . 54
10 Simulation results Population Size GA . . . . . . . . . . 55
11 Simulation results Initialization Probability GA . . . . . 57
12 Simulation results Mutation Probability GA . . . . . . . 58
13 Simulation results Recombination Probability (uniform crossover)GA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
14 Simulation results Multipoints GA . . . . . . . . . . . . 62
15 Simulation results Multipoints vs. Recombination Proba-bility GA . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
16 Simulation results Selection Pressure GA . . . . . . . . . 65
17 Simulation results Tournament Selection Factor GA . . . 67
18 Simulation results Iterations TS . . . . . . . . . . . . . . 68
19 Simulation results Generation Probability TS . . . . . . 70
20 Simulation results Number of Neighbors TS . . . . . . . 71
21 Simulation results Frequency Factor TS . . . . . . . . . 73
22 Simulation results Recency Factor TS . . . . . . . . . . 75
23 Simulation results Init Probability TS . . . . . . . . . . 77
24 t-test variables . . . . . . . . . . . . . . . . . . . . . . . . 78
25 t-test simulation parameters . . . . . . . . . . . . . . . . . 79
26 Simulation results t-test . . . . . . . . . . . . . . . . . . 80
27 Comparison of node b results between GA and TS . . . . . 81
28 Comparison of antenna results between GA and TS . . . . 81
LIST OF FIGURES 7
List of Figures
1 Simple model of the UMTS network planing process . . . . 9
2 Base station sites . . . . . . . . . . . . . . . . . . . . . . . 10
3 Static terminal distribution . . . . . . . . . . . . . . . . . 11
4 Optimal set of base stations . . . . . . . . . . . . . . . . . 12
5 Cell breathing for the service mix from Table 6 . . . . . . . 22
6 Flowchart for network evaluation using cell radii . . . . . . 23
7 Flowchart for network evaluation using path loss data . . . 24
8 Linear scaling . . . . . . . . . . . . . . . . . . . . . . . . . 30
9 Single point crossover strategy . . . . . . . . . . . . . . . . 32
10 Multi point crossover strategy . . . . . . . . . . . . . . . . 33
11 Population of a GA . . . . . . . . . . . . . . . . . . . . . . 34
12 Flowchart of the GA . . . . . . . . . . . . . . . . . . . . . 35
13 Flowchart of TS . . . . . . . . . . . . . . . . . . . . . . . . 42
14 Calculation of recency . . . . . . . . . . . . . . . . . . . . 43
15 Calculation of frequency . . . . . . . . . . . . . . . . . . . 43
16 Example of a selfgenerated scenario . . . . . . . . . . . . . 46
17 Snapshot of a MORANS-Vienna scenario . . . . . . . . . . 52
18 Effect of Iterations to the GA . . . . . . . . . . . . . . . 55
19 Effect of Population Size to the GA . . . . . . . . . . . . 56
20 Effect of Initializing Probability to the GA . . . . . . . . 58
21 Effect of Mutation Probability to the GA . . . . . . . . 59
22 Effect of Recombination Probability (uniform crossover)to the GA . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
23 Effect of Multipoints (Multipoint Crossover) to the GA . 62
24 Comparison between uniform and multipoint crossover (nodeb) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
25 Comparison between uniform and multipoint crossover (sec-tors) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
26 Effect of Selection Pressure to the GA . . . . . . . . . . 66
27 Effect of Tournament Selection Factor to the GA . . . . 67
LIST OF FIGURES 8
28 Effect of Iterations to TS . . . . . . . . . . . . . . . . . 69
29 Effect of Generation Probability to TS . . . . . . . . . . 70
30 Effect of Neighbors to TS . . . . . . . . . . . . . . . . . 72
31 Effect of Frequency Factor to TS . . . . . . . . . . . . . 74
32 Effect of Recency Factor to TS . . . . . . . . . . . . . . 76
33 Effect of Init Probability to TS . . . . . . . . . . . . . . 76
34 Comparison of the GA simulation results . . . . . . . . . . 82
35 Comparison of the TS simulation results . . . . . . . . . . 82
1 INTRODUCTION 9
1 Introduction
This chapter considers the base station siting problem. Therefore, a simplemodel of the network planing process is presented (Section 1.1) and furtheron the automating process (Section 1.2) will be described.
1.1 The Network Planing Process
Figure 1: Simple model of the UMTS network planing process
Figure 1 shows a model of the planing process for UMTS networks. Thismodel is very simple, but it is sufficient for this task. It contains twopoints that will be described in Section 1.1.1 and 1.1.2.The task of this diploma thesis is to automate the first point (InitialPlanning) via software.
1.1.1 Initial Planning
The initial planning (e.g. system dimensioning) provides the first andmost rapid evaluation of the network element count as well as the asso-ciated capacity of those elements. This includes both, the radio accessnetwork as well as the core network. The target of the initial planningphase is to estimate the required site density and site configuration forthe area of interest. Initial planning activities include radio link budget(RLB) and coverage analysis, capacity estimation and lastly estimation ofthe amount of base station hardware and sites, radio network controllers(RNC), equipment at different interfaces and core network elements. Theservice distribution, traffic density, traffic growth estimates and Qualityof Service (QoS) requirements are already essential elements in the initialplanning phase. The calculation of the RLB is carried out for each service.The tightest requirement determines the maximum allowed isotropic pathloss, as well as the maximum allowed cell-radius.
1 INTRODUCTION 10
1.1.2 Optimization
The challenge of optimization is to improve manually or better automati-cally the performance of the network. The task of the optimization is tounderstand and translate the relationship between measured network per-formance and target QoS requirements. Configuration management (CM)represents the database in which all configuration parameters controllingthe network are collected.
1.2 Description of the Automating Process
For automating the initial planing by software, following input parametersare necessary:
Base Station Sites
Figure 2: Base station sites
As shown in Figure 2, the considered area is bounded. In this area,the possible base station sites as well as their parameters (height,azimuth ..., see Section 4) have to be provided.
1 INTRODUCTION 11
Static Terminal Distribution
Figure 3: Static terminal distribution
Additionally to the base station sites, coordinates (snapshot =various user positions in the network area) from the terminals as wellas further parameters, depending services (data rate, activity ..., seeSection 4), antenna-data, speed ... (from which the service-mix willbe calculated) have to be provided.
Coverage
In most cases it is not possible to cover all mobiles and that is whya minimum coverage-factor has to be provided. This coverage-factorrefers to the number of covered mobiles, e.g. 95%. The coverage-factor may not be underrun!
1 INTRODUCTION 12
The goal of the automating process is to find the minimum number of basestations (as shown in Figure 4) that accomplishes the desired coverage.For finding this set, two algorithms are used (described in Section 3).These algorithms also need several input parameters, which are describedin Section 3.1.3.4 and 3.2.4).
Figure 4: Optimal set of base stations
2 NETWORK EVALUATION MODEL 13
2 Network Evaluation Model
When a algorithm finds a solution (that means a set of base stations) ithas to be calculated, how many terminals are covered and whether therequired coverage is warranted or not. That is the task of the networkevaluation. In UMTS networks, the cell radius depends on the number ofusers within the cell. The relationship between cell radius and subscribersis called cellbreathing. There exist three models which take this effect inconsideration. They will be described in the following sections in detail.
2.1 RLB vs. Static Simulation vs. Dynamic Simulation
2.1.1 Radio Link Budget
In this section the WCDMA uplink and downlink budgets are discussed.To estimate the maximum range of a cell, a RLB calculation is needed. Inthe RLB the antenna gains, cable losses, diversity gains, fading margins,etc., are taken into account. The output of the RLB calculation is themaximum allowed propagation path loss, which in return determines thecell range and thus the number of sites needed. There are a few WCDMA-specific items in the link budget, compared with TDMA-based radio accesssystems such as GSM. These include interference degradation margin, fastfading margin, transmit power increase and soft handover gain. Table 1shows an example of a RLB for WCDMA.
2.1.2 Static Simulation
In a static simulation, a single snapshot of a potential user distributioncorresponds to a network situation in equilibrium, which means that thephysical layer procedures like power control are applied iterative for eachuser in the system. Beneath propagation conditions, changes of the indi-vidual services, data rates, requirements and other time invariant param-eters like SHO gain are taken into account. The iteration is done untila certain convergence criterion is fulfilled. This criterion, for example, isthe variation of TX power per iteration for each mobile in the system.
2 NETWORK EVALUATION MODEL 14
Table 1: Example of a WCDMA RLB by Groupe des Ecoles des Telecommuni-cations [17]
2 NETWORK EVALUATION MODEL 15
2.1.3 Dynamic Simulation
The main difference between a static simulation and a dynamic simula-tion is that dynamic simulations include a traffic and a mobility model.These make it possible to develop and test the real-time radio resourcemanagement (RRM) algorithms. The dynamic simulations can be used tostudy the performance of the RRM algorithms in realistic environments,and the results of those simulations can be used as an input for networkplanning tools.
2.1.4 Conclusion
In this diploma thesis the network evaluation via the RLB is chosen, be-cause it offers very fast results (the exactness of the network evaluation isnot as important). Using a static or dynamic simulator will cause very longcalculation times, because both methods need a lot of iterations for eval-uation. Taking in consideration that one simulation on a feasible scenariotakes several hours, it would not be possible to make accurate analysis onthe testing algorithms, because of the long runtime.
2.2 Integration of Service Mix
The RLB as described in Section 2.1.1 does not offer the possibility tocalculate the allowed path-loss for users with different services (speech,data, ...). That can be done using the load factor, which is calculated foruplink and downlink in different ways (see Equ. 1 and 3).
The term service mix means that several service profiles (so called bear-ers) are defined, and the service mix is defined as the percentage of thesubscribers who use these separate bearers. Table 2 shows examples forthese bearers. The parameters of the bearers are explained in detail inSection 2.2.1 and 2.2.2.
Table 2: Typical radio bearers
2 NETWORK EVALUATION MODEL 16
2.2.1 Uplink Load Factor
The uplink load factor can be written as
UL =Eb/N0W/R
N v (1 + i) (1)
The derivation can be found in [15]. The parameters are further explainedin Table 3.
Table 3: Parameters used in uplink load factor calculation
Definition Recommended values
N Number of users per cellv Activity factor 0.67 for speech, assumed 50%
voice activity and DPCCHoverhead during DTX1.0 for data
Eb/N0 Signal energy per bit divided by the noise spec. Dependents on the service,density that is required to meet a predefined multipath fading channel,quality of service (e.g. bit error rate). Noise receive antenna diversity,includes both thermal noise and interference bit rate, mobile speed, etc.
W WCDMA chip rate 3.84 Mchips/sR Bit rate Depends on the servicei Other cell to own cell interference ratio seen Macro cell with omnidir.
by the base station receiver antennas: 55%
As in Equ. 1 can be seen, the service mix is not included. It can beintegrated by making a linear combination of the separate parameters,weighted by k that leads to Equ. 2.
UL = N Ncarrierk=1
Eb,k/N0W/Rk
vk (1 + i) k (2)
2 NETWORK EVALUATION MODEL 17
2.2.2 Downlink Load Factor
The downlink load factor can be written as
DL =Eb/N0W/R
N v [(1 ) + i] (3)
The derivation can be found in [15]. The parameters are further explainedin Table 4.
Table 4: Parameters used in uplink load factor calculation
Definition Recommended valuesfor dimensioning
N Number of connections per cell = number ofusers per cell * (1+ soft handover overhead)
v Activity factor 0.67 for speech, assumed 50%voice activity and DPCCHoverhead during DTX1.0 for data
Eb/N0 Signal energy per bit divided by the noise spec. Dependents on the service,density that is required to meet a predefined multipath fading channel,quality of service (e.g. bit error rate). Noise receive antenna diversity,includes both thermal noise and interference bit rate, mobile speed, etc.
W WCDMA chip rate 3.84 Mchip/sR Bit rate Depends on the servicei Other cell to own cell interference ratio seen Macro cell with omnidir.
by the user. antennas: 55% Average orthogonality factor in the cell ITU Vehicular A channel: 60%
ITU Pedestrian A channel: 90%
Equ. 3 does not include the service mix. Therefor the individual servicesare integrated by linear combination, where k is the percentage of sub-scribers, which ones are using carrier k. This relationship is shown inEqu. 4.
DL = N Ncarrierk=1
Eb,k/N0W/Rk
vk (1 + i k) k (4)
To see, how DL is integrated in the RLB see Section 2.2.3.
2 NETWORK EVALUATION MODEL 18
2.2.3 RLB and Service Mix
Integrating the load factor in the RLB can be done in the same way forup- and downlink using the following equation:
Interference Margin j = 10 log10(1 ) (5)
Table 5 shows an example for the extended RLB. In this example twogroups, which use different carriers are presented. The parameters for theindividual bearers can be found in Table 2.
2 NETWORK EVALUATION MODEL 19
Table 5: Example of a advanced WCDMA RLB with 2 different service users
2 NETWORK EVALUATION MODEL 20
2.2.4 Propagation Model
From the calculated link budget, the cell range R can be easily calculatedfor a known propagation model, for example the Okumura-Hata or theWalfish-Ikegami model. In this case the Okumura-Hata model is used,because it offers better results for urban areas. The propagation modeldescribes the average signal propagation in that environment, and it con-verts the maximum allowed propagation loss in dB to the maximum cellrange in kilometers. In this thesis, two kind of scenarios (see Section 4) areused, where Equ. 6 was used for the selfgenerated scenario, and Equ. 6 or7 can be chosen for the MORANS1 scenario. In fact Equ. 7 was not usedbecause it needs too much runtime (see Section 2.2.6). As an examplewe can take the Okumura-Hata propataion model for an urban macro cellwith base station antenna height of 30m, mobile antenna height of 1.5mand carrier frequncy of 1950 MHz:
L = 138.5 + 35.2log(R) (6)
In Equ. 6 L is the path loss in dB and R is the cell range in km. Thevalues 138.5 and 35.2 are typical values for urban areas and are used inall simulations. More information, how to calculate the parameters canbe found in [17].
Simulating the MORANS scenario (see Section 4.2) a second model canbe used. The MORANS scenario offers path-loss information in a 25mgrid to every base station. The model which was used to calculate thepath loss matrices is a modified COST-Hata model:
L = 139, 44 + 44, 74 log(d) 13, 82 log(Heff ) 6, 55 log(d) + 0, 5 Diff + Clutter(7)
d Distance between receiver and transmitter in kmHeff Effective height of transmitter in mDiff Diffraction value according to DeygoutClutter Clutter dependent correction factor [1]
1MORANS = Mobile Radio Access Network reference Scenarios
2 NETWORK EVALUATION MODEL 21
Table 6: RLB with service mix and propagation model
2 NETWORK EVALUATION MODEL 22
2.2.5 Network Evaluation Using Cell Radii
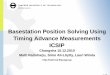
Table 6 describes the relationship between subscribers and cell radius (cellbreathing). Figure 5 shows how the cell breathing influences the cell radiusfor different number of users.
Figure 5: Cell breathing for the service mix from Table 6
The maximum cell radius is defined as the radius that results when oneuser is in the cell (in Figure 5 it is 2424 m).As Figure 5 shows, either the uplink or the downlink curve limit the radius.It is always the smaller radius that is taken for the resulting cell radius.How network evaluation is implemented in software using the cell radiishows the flowchart in Figure 6.
2 NETWORK EVALUATION MODEL 23
Figure 6: Flowchart for network evaluation using cell radii
After determining all cell radii, the coverage ( = number of covered termi-nals based on the total number of users) is calculated. If it is lower thenthe demanded coverage, the solution is not valid!
2 NETWORK EVALUATION MODEL 24
2.2.6 Network Evaluation Using Path Loss Data
Network evaluation using path loss data is more simple, because the prop-agation model does not need to be included and so the advanced RLB(Table 5) can be used. As mentioned earlier, this can be done if the sce-nario offers the required path loss information (as the MORANS scenariodoes).
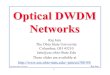
Figure 7 shows the operation of the software. It is nearly the same like inthe cell radii case, but here the path loss is decremented.
Figure 7: Flowchart for network evaluation using path loss data
After calculating the allowed path loss for each base station, the coverageis determined. If it is smaller than the required one, the solution is notvalid.
When using this model, the network evaluation is more accurate , becausethe geographical data is taken into account. However, the implementationshowed that very high calculation times (about two weeks for on simulationon the MORANS scenario2) were required. These high calculation timesare cause by the import of the path loss data. That is the reason why itwas not used further on.
2PC: 2,4GHz RAM: 512MB
3 OPTIMIZATION ALGORITHMS 25
3 Optimization Algorithms
In this chapter, the algorithms which are used for optimization are pre-sented. Altogether, two algorithms were implemented during this work.First, a motivation for the use of the algorithms are given, followed bya general description. After this general description, the implementationof the algorithms for the base station siting problem will be described inparticular.
3.1 Genetic Algorithm
3.1.1 Motivation for the Use of Genetic Algorithms
The number of different optimization techniques is legion. This chaptergives a motivation why Genetic Algorithms (GAs) are well suited for theoptimization of the base station siting problem.For each optimization problem it is necessary to formulate an objectivefunction which assesses the found solutions with regard to their quality(this function is called fitness function). The next paragraphs explainwhy traditional methods of optimization algorithms are not well suited forthis kind of problem.
Enumerative methods: These methods scan the solution space asa whole and store the maximum of the objective function. The point,where the objective function reaches the maximum is taken as solu-tion. These methods are simply not feasible due to the complexityof the solution space.
Random search methods: These methods reduce the effort ofscanning the solution space and choose randomly, but unguided, anumber of points in the solution space. The point with the highestvalue of the objective functions is taken as solution. These methodssimply do not ensure to find the global optimum. It would just bea pure chance to find the global maximum. The efficiency of thismethod is very poor. These methods should not be confused withrandomized techniques where GAs belong to.
Calculus based methods: These methods are based on the exis-tence of derivatives and therefor on the existence of steady objectivefunctions. Since we are in a discrete solutions space, no steady ob-jective function exists and these methods cannot be applied.
The conclusion of the above mentioned points is the following:
3 OPTIMIZATION ALGORITHMS 26
1. We have to find a method, which does not scan the solution spaceas a whole, simply because the solution space is too large.
2. The method should use a kind of guided search, in whatever senseguided has to be understood.
3. The method should operate with a set of solutions, a so called pop-ulation, in the solution space, to scan it more efficiently and to findthe global maxima and not to consider a local maxima as a globalone.
4. The method has to assess the found solutions with an objective func-tion, but it should not be based on the existence of derivatives of theobjective function.
This leads to GAs and to the explanation why they should do any betterthan the methods described before. Goldberg cites the following in [13]:
The genetic algorithm is an example of a search procedure thatuses random choice as a tool to guide a highly exploitativesearch through a coding of a parameter space. Using randomchoice as a tool in a directed search process seems strange atfirst, but nature contains many examples.
GAs differ in four points from traditional methods:
1. GAs work with a coding of the parameter set and not with the pa-rameters themselves.
2. GAs search from a population of solutions, not from a single solution.
3. GAs use payoff (objective function) information, not derivatives orother auxiliary knowledge.
4. GAs use probabilistic transition rules, not deterministic rules.
This results in the following advantages when using a GA:
1. GAs are not constrained by the existence of derivatives or the conti-nuity of the solution space.
3 OPTIMIZATION ALGORITHMS 27
2. GAs are not tempted so easily to consider a local extrema as a globalone, because they search from a big population of solutions.
3. GAs are not depending on auxiliary information. It is said that GAsare blind, because they asses solutions only on payoff values. How-ever this can also be a disadvantage, because valuable informationcan be rejected and this can lead to a poorer performance of the GAcompared with algorithms especially designed for this kind of prob-lem. On the other hand it usually should be possible to incorporatethis auxiliary information into the objective function.
4. GAs try to get valuable information out of previous solutions in thepopulation and they use this information for a guided search.
3.1.2 Biological Terminology
The background of GAs is the field of evolution and biology, hence a lot ofterms and expressions in the world of GAs are out of these fields. Usuallypeople who deal with informatics or other technical fields are not veryfamiliar with this kind of expressions. Therefore, the most used technicalterms should be explained here, because they will be used in the furthersections. Most of the following explanations and definitions are basedon [13], [6] and [14].
Chromosomes (individuals): All living organisms consist of cells, andeach cell contains the same set of one or more chromosomes. In anartificial system the chromosomes would correspond to the encodedform of a solution.
Gene: Chromosomes are composed out of genes. One can think of a geneas encoding a trait, such as eye color. In artificial computing thereforthe terms feature, character or detector are very common.
Allele: The genes may have different values which are called alleles. Re-ferring to the eye example again, different alleles would be: brown,blue, hazel and so on. In artificial computing this corresponds to theterm value.
Locus: In genetics the position of the gene is called locus. Therefore thereis a separation between the genes allele and its locus. In artificialcomputing this term corresponds to a position.
Genome: The complete collection of genetic material is called the organ-isms genome.
Genotype: This term refers to a particular set of genes contained in agenome. In artificial genetic systems this package of strings is calleda structure.
3 OPTIMIZATION ALGORITHMS 28
Phenotype: In natural systems, the organism formed by the interactionof the total genetic package with its environment is called the pheno-type. Mapped to a human being this would compare with its physicaland mental characteristics, such as eye color, height, brain size andintelligence. In artificial genetic systems this is denoted as parameterset, solution alternatively, or point (in the solution space).
Diploid: Organisms whose chromosomes are arrayed in pairs are calleddiploid.
Haploid: Organisms whose chromosomes are unpaired are called haploid.
Table 7 gives a brief summary and comparison of most of the used termsin natural genetics and their counterparts in artificial genetics. It has beentaken from [13].
Table 7: Comparison of natural and GA terminology [13]
Natural Genetic Algorithm
chromosome stringgene feature, charactet or detectorallele (feature) valuelocus string positionsgenotype structurephenotype parameter set, alternative solution, a decoded structure
3.1.3 Operators of Genetic Algorithms
The following sections give a short treatment of the basic operators of aGA. A complete description in depth would be far out of the scope of thisthesis. For a complete treatment of the following topics I especially referto [13], [6] and [14].Each solution is presented in form of a solutions (Figure 11 shows, howthe chromosome is coded for the base station siting problem). How theseparate operators interact shows Figure 12.
3.1.3.1 Initialization
The Initialization generates N (N = population size) chromosomes andfills them with random values.
3 OPTIMIZATION ALGORITHMS 29
3.1.3.2 Selection
When working with GAs a decision has to be made, which individuals arechosen to serve as parents for generating offspring, also termed children,with genetic operators and a further decision has to be made which ofthese parents and children are chosen to remain in the new population.The aim of the selection process is to emphasize fitter individuals in hopesthat their offspring will in turn have a higher fitness. However the processof selection has to be balanced very carefully with the genetic operators,because a selection which puts the emphasis only on individuals with thehighest fitness values, reduces the diversity in the population which isneeded for a further progress. In the language of optimization this wouldmean that the GA can get stuck in a local minima and never get out of itagain. On the other side, if the emphasis is on individuals which have atoo low fitness value, the progress of evolution will be to slow and it willtake too much time until the GA converges to the optimum or close to it.The following sections describe the selection schemes used in this work.
3.1.3.2.1 Roulette Wheel Selection
This is the selection scheme originally proposed by Holland. It uses afitness proportional selection, in which the expected value of an individ-ual, i.e. the expected number of times an individual will be selected toreproduce, is that individuals fitness divided by the average fitness of thepopulation (Equ. 8). The name roulette wheel selection stems from thefact, that this scheme can best be visualized using a roulette wheel. Eachindividual gets a slice on the wheel and the size corresponds to the fitnessof the individual. Then the wheel is spun N times, where N is the numberof individuals in the population. Each time those individual is selectedwhich is under the wheels marker.
ps(i) =f(i)nj=1 f(j)
(8)
In this diploma thesis, the fitness function is implemented using LinearScaling (watch Figure 8) what means, that the fitness function g(i) (seeSection 3.1.3.3.3) is linear transformed to the so called weighting functionf(i):
f(i) = a g(i) b (9)
The goal is to fulfill fav = gav. The best chromosome should be taken Cmtimes in average for the next generation:
3 OPTIMIZATION ALGORITHMS 30
Figure 8: Linear scaling
fmax = Cm fav (10)
Cm Selection pressuregav Average fitness of the populationfav Average weighting function value of the population
So the factor a and b can be calculated the following way:
a =Cm fav favgmax fav (11)
b = a fav fav (12)Using Cm it can be controlled, how often good individuals are favoredover bad individuals.However, it needs to be taken in consideration that a too high selectionpressure can cause following effects:
Quick production of good individuals (so called Superindividu-als)
3 OPTIMIZATION ALGORITHMS 31
The diversity of the populations becomes smaller The GA often converges against a local optimum
A low selection pressure means that good individuals are nearly not fa-vored, and that causes the following effects:
Good individuals propagate hardly Bad individuals stay in the population The GA degenerates to a random search The GA converges not or very slow
Experiments have shown that the selection pressure should vary between1.2 to 4 for 50 to 100 chromosomes.
3.1.3.2.2 Tournament Selection
Tournament selection provides selection pressure by holding a tournamentamong s competitors, with s being the tournament size. The winner ofthe tournament is the individual with the highest fitness of the s tourna-ment competitors, and the winner is then inserted into the mating pool.The mating pool, being comprised of tournament winners, has a higheraverage fitness than the average population fitness. This fitness differenceprovides the selection pressure, which drives the GA to improve the fit-ness of each succeeding generation. Increased selection pressure can beprovided by simply increasing the tournament size s, as the winner from alarger tournament will, on average, have a higher fitness than the winnerof a smaller tournament.
3.1.3.2.3 Elitism
This method has first been introduced by Kenneth DeJong in 1975. Itshould be considered as an addition to many selection methods and notas an own selection method, because it forces the GA to retain someof the best individuals at each generation, what means, that the fitness(see Section 3.1.3.3.3) is increasing monotony. With the application ofother selection methods very often highly fit individuals are not selectedor destroyed by crossover and mutation. Elitism can significantly improve
3 OPTIMIZATION ALGORITHMS 32
the performance of a GA.The disadvantage of Elitism is that the algorithm can stay in a localminima and the optimal solution will not be found.
3.1.3.3 Genetic Operators
For a generation of new individuals in the population two well knownoperators out of nature are applied on the chromosomes. They serveas a major basis for the variation and innovation of their already foundsolutions. However the number of different operators is different in natureand in artificial genetics as well. Therefore, I give a short overview of theoperators implemented in this work.
3.1.3.3.1 Crossover (Recombination)
Once the two parents for a new offspring are selected via the selectionscheme they are getting combined. Like in nature, when a new offspringis generated it inherits some genes from each of the parents. For example,a child will inherit genes of its mother and the rest of its father. Thesame is done in artificial genetics. A new individual inherits a part of thegenes of one parent and the other part of the genes of the other parent.There are numerous methods, how this mapping of genes from the parentsto the offspring is done. The two methods implemented in this work aredescribed below:
Uniform crossover: Single point crossover is the simplest form of thecrossover operator. Here, a single gene is chosen randomly and theparts of the two parents after the crossover position are exchangedto form two offspring. An example with uniform crossover showsFigure 9.
Figure 9: Single point crossover strategy
Multi point crossover: Here N points are generated, which divide theindividuals in N+1 parts. In this thesis, all generated parts contain
3 OPTIMIZATION ALGORITHMS 33
x genes, without the last part in the string. The last part includesthe remaining genes, when the individuum is not dividable by N.Those parts are exchanged randomly to form two offspring. Uniformcrossover is a special case from multi point crossover, where the num-ber of genes is equal to the number of crossover points. Figure 10shows an example for 3 crossover points.
Figure 10: Multi point crossover strategy
3.1.3.3.2 Mutation
The generation of new individuals is usually implemented via the crossoveroperator. Mutation is very often the only possibility to get out of a localmaxima or minima when the GA gets stuck in it, because the populationcontains too much individuals with a fitness value corresponding to thislocal maxima or minima and therefore, the GA assumes that it is closeto the absolute maxima or minima. The task of mutation is to changealleles of genes randomly, usually with a given low probability. Furtheron, mutation is necessary for generating new gene material (e.g. mutationis the only way to create solutions of a 0 solution).
3.1.3.3.3 Fitness Function
Usually all of the constraints needed for the formulation of the optimiza-tion problem are packed into a fitness function of the GA. The fitness func-tion has the task to assess the individuals in a population. The purposeof the fitness function is to separate better solutions from worse solutions.However this separation should not be understood as a sharp cut off point.It is better if the fitness function assess the solutions in a steady manner,because of convergency reasons of the GA. The exact shape of the fitnessfunction can vary from very complicated to very simple, because it is veryproblem dependent. For further details in designing the fitness function Irefer to [13] and [14].
3 OPTIMIZATION ALGORITHMS 34
3.1.3.4 Implementation of the GA for Optimizing the Base StationSiting Problem
Figure 12 shows the flowchart of the software implemented GA.
The following input parameters for the GA have to be provided:
Population size (number of individuals) Initializing probability Mutation probability Crossover probability Number of iterations Selection pressure
The Population of a GA consists of N (population size) chromosomes,where every chromosome represents a set of base stations. Each gene ofone chromosome represents one base station (Figure 11).
Figure 11: Population of a GA
The gene is binary coded and can either be 1 for an active base stationor 0 for a inactive base station.
3 OPTIMIZATION ALGORITHMS 35
Figure 12: Flowchart of the GA
During Initialization, N individuals are initialized. Therefor the initial-ization probability is used. An initialization probability of e.g. 90% meansthat 90% of the base stations are set active. These active genes are ran-domly distributed in the chromosome.
In the next step (Evaluation), the number of covered mobiles using theRLB-Model are calculated. Afterwards it will be checked, whether thesolutions (the chromosomes) are valid (a solution is valid if the requiredcoverage is fulfilled) or not. Invalid solutions are signed with a flag andwill not be used for the selection. For the valid chromosomes, the fitnessfunction is calculated (= number of base stations). Out of this value, thefitness (see Section 3.1.3.3.3) is determined using linear scaling (in this
3 OPTIMIZATION ALGORITHMS 36
case, the linear transformation is done by f(i) = a g(i) + b becauseafter transformation, the individual with the fewest base stations shouldget the highest values).
After the evaluation is finished and the fitness of the individuals is de-termined, the best individual will be selected. The best individual is theone with the highest fitness. If two or more solutions have the same value,the one with the higher coverage area will be taken. The coverage is calcu-lated using a virtual terminal that analysis the whole area. That means,the virtual terminal goes through all pixels and checks, whether it is cov-ered or not, and sums up the covered pixels. This way, the covered areacan be calculated.In the next step, the parents for the generation are selected (Selection),where either tournament selection or roulette wheel selection can be cho-sen.
After the parents have been selected, Recombination produces the nextpopulation. Therefore, a recombination probability is needed as input pa-rameter. The recombination probability is the probability for taking agene (in case of multipoint crossover a set of genes) for child 1 from par-ent 1.
When all children are produced, Mutation possibly changes them. Itscans each gene of all children and changes the value of a gene with a usergiven mutation probability.
When mutation is finished, the children need to be evaluated (Evaluation).Afterwards, the best chromosome will be found and the algorithm startswith selection again.
The Stopping Criterion is fulfilled, if a user given number of iterationsis reached.
3 OPTIMIZATION ALGORITHMS 37
3.2 Tabu Search
3.2.1 Motivation for the Use of Tabu Search
Classical optimization methods (simplex method, gradient method ...) of-ten encounter great difficulty when faced with the challenge of solvinghard problems that abound in telecommunications. Our base station sit-ing problem cannot be tackled with any reasonable hope of success, withinpractical time horizons, by solution methods that have been the predom-inant focus of academic research throughout the past three decades (andwhich are still the focus of many publications). Tabu search (TS) as wellas GAs go beyond the classical design to provide methods, which are dra-matically changing our ability to solve the base station siting problem. Adistinguishing feature of tabu search is its exploitation of adaptive formsof memory, which equips it to penetrate complexities that often confoundalternative approaches. The rich potential of adaptive memory strategiesis one of the main benefits of TS. Principles that have emerged from the TSframework give a foundation to create practical systems whose capabilitiesmarkedly exceed those available earlier.
3.2.2 What is Tabu Search?
The tabu search algorithm was developed independently by Glover andHansen for solving combinatorial optimization problems. It is a kind ofiterative search and is characterized by the use of a flexible memory. It isable to eliminate local minima and to search areas beyond a local mini-mum. Therefore, it has the ability to find a global minimum of a searchspace. This works by moving to the best admissible solution in the neigh-borhood of the current solution in terms of the objective value and taburestrictions. A tabu list is employed to store the characteristics of ac-cepted moves so that these characteristics can be used to classify certainmoves as tabu (i.e. to be avoided) in later iterations. In other words, thetabu list determines which solutions may be reached by a move from thecurrent solution. Since moves not leading to improvements are acceptedin tabu search, it is possible to return to already visited solutions. Thismight cause a cycling problem to arise. The tabu list is used to over-come this problem. A strategy called the forbidding strategy is employedto control and update the tabu list. By using the forbidding strategy, apath previously visited is avoided an new regions of the search space areexplored.
3.2.3 Strategies
A simple tabu search algorithm consists of three main strategies: for-bidding strategy, freeing strategy and short-term strategy [11] [12]. The
3 OPTIMIZATION ALGORITHMS 38
forbidding strategy controls what enters the tabu list. The freeing strategycontrols what exits the tabu list and when. The short-term strategy man-ages the interplay between the forbidding and freeing strategies to selecttrial solutions. Apart from these strategies, there can be also a learningstrategy which consists in the use of intermediate and long-term memoryfunctions. This strategy collects information during a tabu search run andthis information is used to direct the search in subsequent runs.
3.2.3.1 Forbidding Strategy
This strategy is employed to avoid cycling problems by forbidding certainmoves or in other words classifying them as tabu. In order to prevent thecycling problem, it is sufficient to check if a previously visited solution isrevisited. Ideally, the tabu list must store all previously visited solutionsand before any new move is carried out the list must be checked. However,this requires too much memory and computational effort. A simple rule toavoid the cycling problem could be not visiting the solution visited at thelast iteration. However, it is clear that this precaution does not guaranteethat cycling will not occur. An alternative way might be not visiting thesolutions already visited during the last Ts iterations (these solutions arestored in the tabu list). Thus, by preventing the choice of moves thatrepresent the reversal of any decision taken during a sequence of the lastTs iterations, the search moves progressively away from all solutions of theprevious Ts iterations. Here, Ts is normally called the tabu list length ortabu list size. With the help of a appropriate value of Ts, the likelihoodof cycling effectively vanishes. If this value is too small, the probabilityof cycling is high. If it is too large then the search might be driven awayfrom good solution regions before these regions are completely explored.
The tabu list embodies one of the primary short-term memory functionsof tabu search. As explained above, it is implemented by registering onlythe Ts most recent moves. Once the list is full each new move is writtenover the oldest move in the list. Effectively, the tabu list is processed as acircular array in a first-in-first-out (FIFO) procedure.
3.2.3.2 Aspiration Criteria and Tabu Restrictions
An aspiration criterion is used to make a tabu solution free if this solu-tion is of sufficient quality and can prevent cycling. While an aspirationcriterion has a role in guiding the search process, tabu restrictions havea role in constraining the search space. A solution is acceptable if thetabu restrictions are satisfied. However, a tabu solution is also assumedacceptable if the tabu restrictions are satisfied. However, a tabu solutionis also assumed acceptable if an aspiration criterion applies regardless of
3 OPTIMIZATION ALGORITHMS 39
the tabu status. The move attributes are recorded and used in tabu searchto impose constraints that prevent moves from being chosen that wouldreverse the changes represented by these attributes. Tabu restrictions arealso used to avoid repetitions rather than reversals. These have the roleof preventing the repetition of a search path that leads away from a givensolution. By contrast, restrictions that prevent reversals have the role ofpreventing a return to previous solution. A tabu restriction is typicallyactivated only in the case where its attributes occurred within a limitednumber of iterations prior to the present iteration (a recency-based re-striction), or occurred with a certain frequency over a larger number ofiterations (a frequency-base restriction). More precisely, a tabu restric-tion is enforced only when the attributes underlying its definition satisfycertain thresholds of recency or frequency.
In recency-based restriction, a tabu duration is determined and the tabusolution is retained as tabu throughout the tabu duration. Rules for de-termining the tabu duration are classified as static or dynamic. Staticrules choose a value for the duration that remains fixed throughout thesearch. Dynamic rules allow the value of the tenure to vary.
In frequency-based restriction, a frequency measure is used. The measureis a ratio whose numerator represents the count of number of occurrencesof a particular event and whose denominator generally represents one ofthe following quantities [19]:
Sum of the numerators Maximum numerator value Average numerator value
The appropriate use of aspiration criteria can be very significant for en-abling a tabu search to achieve its best performance. An aspiration crite-rion can be either time-independent or time-dependent. Early applicationsof tabu search employed only a simple type of aspiration criterion whichis a time-independent criterion. It consists of removing a tabu classifica-tion from a trial solution when the solution shows a better performancethan the best obtained so far. This remains widely used. Another widelyused aspiration criterion is aspiration by default. With this criterion, if allavailable moves are classified as tabu, and are not rendered admissible byother aspiration criteria, then the least tabu solution is selected. Thiscould be a solution that loses its tabu classification by the least increasein the value of the present iteration number. Apart from these criteria,there are several other criteria used for aspiration such as aspiration byobjective, aspiration by search direction and aspiration by influence [19].
3 OPTIMIZATION ALGORITHMS 40
3.2.3.3 Freeing Strategy
The freeing strategy is used to decide what exits the tabu list. The strategydeletes the tabu restrictions of the solutions so that they can be recon-sidered for further steps of the search. The attributes of a tabu solutionremain on the tabu list for a duration of Ts iterations. A solution is con-sidered admissible if its attributes are not tabu or if it has passed theaspiration criterion test.
3.2.3.4 Short-Term Strategy (Overall Strategy)
This strategy manages the interplay between the above different strategies.Figure 13 shows this interaction. The Flowchart and the implementationare described in Section 3.2.4.
3 OPTIMIZATION ALGORITHMS 41
3.2.4 Implementation of TS for Optimizing the Base Station SitingProblem
Figure 13 shows the flowchart of the implementation of TS. The followinginput parameters have to be provided for the TS:
Init probability Generation probability Recency factor Frequency factor Number of iterations Number of neighbors
A solution of TS is exactly the same as a chromosome of the GA (seeFigure 11) and consists of x base station bits (for each base station onebit) that can either be 1 or 0.
During Initialization, the initial solution is generated. Therefor a initprobability is necessary. The init probability is defined as the number ofactive base stations based on the total number of base stations. The activebase stations are randomly distributed over the solution space. The ini-tialization for TS is nearly the same as for GA, however only one solutionis generated and not a whole population.
In the next step (Neighbor Production), a candidate list of solutions iscreated. For the creation of new solutions, a mechanism similar to the mu-tation known from the GA is used. N (Number of Neighbors) neighborsare produced out of the initial solution by inverting a bit with a user-givenprobability (generation probability), if the tabu restrictions allow this.
In the next step (Evaluation) the number of covered mobiles are cal-culated (same procedure as at the GA). Afterwards it will be checked,whether the solutions are valid (it is valid, when the required coverage isfulfilled) or not. Invalid solutions are signed with a flag and cannot bechosen for the best admissible solution. For valid solutions, the fitness iscalculated, which is defined as the number of base stations.
3 OPTIMIZATION ALGORITHMS 42
Figure 13: Flowchart of TS
After the fitness is calculated for every neighbor, the evaluation is finishedand the best solution will be chosen (Get Best Neighbor). The best so-lution is defined as the solution, which has the lowest fitness. The one withthe larger covered area (calculated via a virtual terminal) is chosen, if twoor more solutions have the same fitness value like for the genetic approach.
After chosing the best solution, the Stopping Criterion will be checked.The stopping criterion terminates the tabu search procedure after a spec-ified number of iterations).
If the stopping criterion is not satisfied, the tabu list will be updated(Update Memory). The employed tabu restrictions are based on therecency and frequency memory criteria. If a parameter of the solutiondoes not satisfy one of the following tabu restrictions, it is accepted asbeing tabu:
recency > r N (13)frequency < f Avfreq (14)
where N is the number of base stations, Avfreq denotes the average fre-quency of change of bits (= setting a base station active or inactive). Theparameters r and f are the recency and the frequency factor. Recencyand frequency are calculated after every iteration for every bit in the tabu
3 OPTIMIZATION ALGORITHMS 43
list. Figure 14 and 15 show how it is done.
Figure 14: Calculation of recency
Figure 15: Calculation of frequency
4 SCENARIOS 44
4 Scenarios
As we have seen in Section 1.2, a network scenario with possible basestation sites as well as the terminal distribution and some other user spe-cific parameters is required for testing the algorithms. In the first step,the algorithms, especially the GA was developed and tested on selfgen-erated scenarios (in the center of Vienna) with a small amount of ter-minals and base stations. These selfgenerated scenarios are described inSection 4.1. Later on, the software was adapted to import reference sce-narios from MORANS [1], that provides data from Vienna, Berlin andTurin. MORANS is offered by COST 273 and is described in particularin Section 4.2. Further on, all tests have been made on the virtual sce-nario MORANS-Vienna, and also TS was completely developed on thisscenario.
4.1 Selfgenerated Scenarios
The scenario includes a 10km x 10km area, which has its coordinate originin the left lower corner. The base station sites are given in a separateinput-file in form of
sitename x-coordinate y-coordinate sector azimuth
like following abstract shows:
S i t e 0 0 6334 5705 120 0S i t e 0 1 6334 5705 120 120S i t e 0 2 6334 5705 120 240
The fact that a base station can contain more than one sector forceschanges in the definition of the best solution. That means, if two or moresolutions have the same number of base stations, the number of sectorantennas is taken as second criterion and the covered area drops down thehierarchy and is taken as third criterion.
The terminal positions are given in a separate input-file in form of
x-coordinate y-coordinate
like following abstract shows:
7441 34343297 37534313 5786
4 SCENARIOS 45
Further on, the RLB parameters as well as the bearer profiles and theservice mix are provided in form of a configuration file, which also includesthe algorithm-specific parameters and the paths to the base station andterminal input files. The list below shows an abstract of a configurationfile:
Bas i s s t a t i o n D:\\ uni \\bs . txtTerminals D:\\ uni \\ t e rmina l s . txt
/ GAPARAMETER /
I n i t i a l i s i e r u n g s i n d i v i d u e n 10I n i t i a l i s i e r u n g sw a h r s c h e i n l i c h k e i t 70Mutat i onswahr s che in l i chke i t 10Rekomibnat ionswahrsche in l i chke i t 30Durchlaeufe 30Se lekt ionsDruck 4Rekombinationspunkte 10TournamentSelektionsParameter 1
/ Tabu Search Parameter /I n i t p r o b a b i l i t y 70Gene ra t i onprobab i l i t y 20Recency 0 .001Frequency 1 .5Neighbors 10Cycles 100
/ LB Parameter // Uplink /Transmitpower UL 250TX Antenna Gain UL 0Cable Body Loos UL 2Thermal Noise Density UL 174Rece iver Noi se Figure UL 5RX Antenna GAin UL 18Cable/Body Loss UL 2Slow Fading Margin UL 7.27Hand Over Gain UL 0Indoor Loss UL 0TPC Headroom UL 0
/ Downlink /...
Coverage 95
/ Carr ier P r o f i l e /Data ra t e UL Car r i e r Pro f i l 1 12200Ac t i v i t y UL Ca r r i e r P r o f i l 1 67Eb No UL Carr i e r Pro f i l1 5
4 SCENARIOS 46
Perc en tage UL Car r i e r Pro f i l 1 80
Data ra t e DL Car r i e r Pro f i l 1 12200Ac t i v i t y DL Ca r r i e r P r o f i l 1 67Eb No DL Carr i e r Pro f i l1 5Or thogona l i y DL Car r i e r Pro f i l 1 90Pe r c en tage DL Car r i e r Pro f i l 1 80
I n t e r f e r e n c e C a r r i e r P r o f i l 1 55...
/ Propagation Constants /Propagation Constant A 138 .5Propagation Constant B 35 .7
As can be seen, the service mix is given via a percentage factor for up-and downlink for the specific carriers. Figure 16 shows an example of aselfgenerated scenario.
Figure 16: Example of a selfgenerated scenario
4 SCENARIOS 47
4.2 MORANS Scenario
The scope of MORANS is to provide a public reference network scenario.The goal is to make the results of the different approaches used, whenevaluating radio network planning or radio resource management strate-gies more comparable. The data of the scenarios (Vienna, Berlin, Turin)is structured in layers that include two types of scenario elements:
A synthetic scenario, based on a simple and rectangular geometricallay-out, simplified models, which make it easy to interpret the results.
Two real-world based scenarios, where some data, in particular ter-rain data, is taken from the real world, thus giving the possibility totest radio network algorithms under more realistic conditions.
In the following sections, the data (separated in different layers) which areimplemented in this diploma thesis are described in particular.
4.2.1 Layer 1
This layer collects all information concerning Real-World terrain data, likethe geographical description of the considered scenario and the size of thesimulation area, i.e. of the clutter. Each clutter has been divided in squareelements, called pixels: size of clutter and pixels depends on the particularchoice taken for each scenario. To each pixel of the considered scenarioit is also assigned a specific indicator, which represents the geographicalclass of the pixel. In such a way, each square element can belong to anurban or suburban area, or to an open space area, and so on, accordingto each specified definition of class. Moreover, the morphology of the sim-ulation area is also described by means of an elevation database, whichgives the height of each pixel over the average sea level, measured in me-ters. Information about streets and motorways are available, by means ofvector data files. This permits to define the simulation scenario from thegeographical point of view. Other elements are specified in this layer, de-pending on each scenario: in particular the Vienna environment providesalso information about building contours, including height quota of build-ings, while the Turin scenario contains information about the locationsof railways over the simulation area. In the Vienna scenario, streets aredistinguished in highways, national roads, district roads and side streets.The used coordinates are UTM coordinates.Especially the topo- and clutter maps have been used from this layer.
4.2.2 Layer 2
Traffic information: traffic information have been provided, according tothe clutter definition and to the geographical characteristics of each pixel
4 SCENARIOS 48
belonging to the considered scenario. Moreover, service information andtraffic realization have been provided too, according to the informationon the usage and penetration of the considered services in the simulationarea. This layer also includes snapshots of static terminal distributionsthat are given in form of
name X Y clutter service mobility activity penetration-type penetration-loss
like following abstract of a snapshot shows:
0 59686 5337119 park Speech 90km/h Ina c t i v e 5dB 7.921 603853 5339642 urban Speech 50km/h Active DL 5dB 9.062 590401 5338323 wood 144 kBit 0km/h Active UL 5dB 5.49
.
.
The service mix for the whole map is calculated by summing up all service-data (taking the activity in consideration), and base them on the absolutenumber of terminals.
4.2.3 Layer 5
This layer describes the site location information, related to the simula-tion area described by means of data stored in layer 1. Each site of theconsidered scenario, identified by a unique identifier, is described by itscoordinates and by the height of the antenna. Depending on the particu-lar environment, each scenario is composed of a different number of sites,that are given in form of
name X Y height
The listing below shows an abstract of such a site-file:
S i t e101 603003 5339413 28S i t e102 600104 5338034 29S i t e103 595564 5338279 32
.
.
4.2.4 Layer 6
This layer provides the propagation data related to each scenario, withreference to the particular assumption related to each clutter. The Vi-enna scenario provides the path loss values, describing the assumptionsmade, by means of a short description of the propagation algorithms (a
4 SCENARIOS 49
modified COST-Hata model), and the properties of the resulting path lossmatrices.These data have been used for net evaluation using path losses (see Sec-tion 2.2.6). For every site, a separate path loss file is provided, whichcontains the path loss information in hex-format in a 25m grid for an area,that is specified in a corresponding header file. For detailed informationsee [1].
4.2.5 Layer 7
This layer contains the Node B configuration parameters, as transmitterand antenna information, referring to the site deployment described inlayer 5. The data are provided in a transmitter file in form of
site transmitter antenna azimuth() downtilt()
like following abstract shows:
S i t e10 S i t e 10 0 60 Sector 30 4S i t e10 S i t e 10 1 60 Sector 150 4S i t e10 S i t e 10 2 60 Sector 270 4S i t e100 S i t e100 0 60 Sector 30 4
.
.
4.2.6 Additional Parameters
The data described in the layers above does not include all information,which are necessary for the optimization. Therefore, the following infor-mation have to be provided in a separate configuration file, which alsoincludes the algorithm-specific parameters as well as the paths to the filesfrom the separate layers.The following data have to be provided additionally:
radio bearer parameters required coverage RLB parameters propagation constants
The listing below shows an abstract of a configuration file for a MORANSscenario:
4 SCENARIOS 50
Bas i s s t a t i o n D:\ Layer 5 \5.101 V i e S i t e I n f o rma t i on . txtTransmitter D:\ Layer 7 \7.101 Vie Transmi t t e r In fo rmat ion . txtTerminals D:\ Layer 2 \2.301 V i e Us e rRea l i s a t i on po s . txtC l u t t e rF i l e D:\ Layer 1 \Clut te r \1.102 V i e c lu t t e r 25m . t i fImageFi le D:\ Layer 1 \TopoMaps\1.103 Vie Topo 50000 . TIFPathLosses D:\ Layer 6 \6.201 Pa th Lo s s e s f o r 5 .101PathLossFi leSyntax 6.201 VieP i x e l S i z e 5 P ix e l g r o e s s e in m
/ GAPARAMETER /I n i t i a l i s i e r u n g s i n d i v i d u e n 10I n i t i a l i s i e r u n g sw a h r s c h e i n l i c h k e i t 70Mutat i onswahr s che in l i chke i t 10Rekomibnat ionswahrsche in l i chke i t 30Durchlaeufe 30Se lekt ionsDruck 4Rekombinationspunkte 10TournamentSelektionsParameter 1
/ Tabu Search Parameter /I n i t p r o b a b i l i t y 70Gene ra t i onprobab i l i t y 20Recency 0 .001Frequency 1 .5Neighbors 10Cycles 100
/ LB Parameter // Uplink /Transmitpower UL 250TX Antenna Gain UL 0Cable Body Loos UL 2Thermal Noise Density UL 174Rece iver Noi se Figure UL 5RX Antenna GAin UL 18Cable/Body Loss UL 2Slow Fading Margin UL 7.27Hand Over Gain UL 0Indoor Loss UL 0TPC Headroom UL 0
/ Downlink /.
Coverage 95
/ Carr ier P r o f i l e /Eb No UL Carr i e r Pro f i l1 5Eb No DL Carr i e r Pro f i l1 5Or thogona l i y DL Car r i e r Pro f i l 1 90I n t e r f e r e n c e C a r r i e r P r o f i l 1 55
Eb No UL Carr i e r Pro f i l2 5
4 SCENARIOS 51
.
/ Propagation Constants /Propagation Constant A 138 .5Propagation Constant B 35 .7
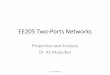
The MORANS scenarios are more complex then the selfgenerated scenar-ios and include about 650 sectors and 2000 mobiles. Figure 17 shows anexample of a MORANS snapshot.
4 SCENARIOS 52
Figure17:Snapshot
ofaMORANS-Viennascenario
5 RESULTS 53
5 Results
For testing the algorithms and finding the best parameter set for the in-dividual algorithm, several simulations have to be performed. The resultsof these simulations as well as the comparison of the results are presentedin this chapter.
5.1 Simulation Conditions
The simulations were made made on theMORANS-Vienna scenario . 2.3-01-Vie-UserRealisation-pos was the used terminal distribution.For finding the parameter set for an optimal solution, the separate valueshave to be varied in a bounded range. Therefor feasible values have beentaken from literature and always one parameter has been varied, mean-while the remaining parameters were constant. From these feasible values(shown in Table 8) it was expected that they would provide relative goodsolutions and by varying the parameters, the optimal solution should befound. After every simulation a snapshot from the result as well as a cov-erage plot and a textfile, which includes the names of the selected siteshave been saved.
Table 8: Simulation parameters
Parameter Recommended values
Genetic AlgorithmPopulation size (number of individuals) 10Initializing probability 90Mutation probability 10Recombination probability 60Number of iterations 100Selection pressure 4Multipoints 0 (=uniform crossover)Tournament selection parameter 0 (=roulette wheel selection)
Tabu SearchInit probability 70Generation probability 20Recency factor 0.001Frequency factor 1.5Number of iterations 100Number of neighbors 10
5 RESULTS 54
5.2 Genetic Algorithm
5.2.1 Iterations
Parameter range: 0 .. 200
Table 9: Simulation results Iterations GA
Out of Table 9 can be seen that the number of iterations is a very impor-tant parameter for the GA. Elitism forces the GA to accept only bettersolutions then the older one. So the solutions can only get better, whenperforming more iterations. However more iterations also cause longerruntimes. Especially during the first iterations, the algorithm convergesvery fast against an optimum as Figure 18 shows, but finds hardly bet-ter solutions at higher iteration numbers. Thus, the number of iterationsshould be between 100 and 200 for this kind of problem, whereas it shouldvary between 100 and 120 for fast results.
Note: The criterion for the fitness function is the number of base stations.The number of antennas do not need to drop steady, because a solutionwith more antennas and fewer base stations is the better solution.
5 RESULTS 55
Figure 18: Effect of Iterations to the GA
5.2.2 Population Size
Parameter range: 10 .. 100
Table 10: Simulation results Population Size GA
5 RESULTS 56
As can be seen from Figure 19 and Table 10, the number of base stationsas well as the number of antennas does not drop steady with higher pop-ulations size as could be expected.In fact, the number of iterations and the population size are correlated.That means, if we have a population size of 10 chromosomes and 100 it-erations, we have the same runtime as when having 20 individuals and 50iterations. Big population sizes have the disadvantage, that very often 2 ormore solutions have the same fitness, what means that the covered areaneeds to be calculated, and that makes the algorithm slow. Therefore,mostly smaller populations sizes (about 10 .. 20) and a higher numberof iterations were used. The optimal populations size was found with 50individuals as can be seen from Figure 19.
Figure 19: Effect of Population Size to the GA
5 RESULTS 57
5.2.3 Initialization Probability
Parameter range: 0 .. 100%
Table 11: Simulation results Initialization Probability GA
Figure 20 and Table 11 show the effect of initialization probability to theGA. A proposal, how the initialization probability should be chosen cannotbe given. The setting is problem and situation depended. For example,if 10 base stations and 2 terminals are given, the initialization probabilityshould be very small, for getting good solutions. In case of 100 terminalsand 10 base stations higher values are better. For these simulations, avery high value (90%) was chosen, because the scenario includes about 3to 4 times more terminals than antennas and that is why we will need a lotof antennas to fulfill the coverage. Figure 20 shows that the optimum is40%, what can be explained therewith that the resulting solution includesabout the half number of base stations from the possible ones. So if weinitialize with 40%, the initialized population is very close to the optimumsolution.
5 RESULTS 58
Figure 20: Effect of Initializing Probability to the GA
5.2.4 Mutation Probability
Parameter range: 0 .. 100%
Table 12: Simulation results Mutation Probability GA
5 RESULTS 59
As Figure 21 and Table 12 show, mutation probability has a big influenceon the results of the GA. For very high values (about 40%) the solutionsget worse. The solutions, which are found are hardly better then the de-fault solution (= all sector antennas are active). This phenomenon canbe explained in this way that after recombination relative good individ-uals are produced, because selection chooses good parents with a higherprobability. Very high values for mutation probability means that mostof genes of these solutions are changed. So the solution will be invertedin a certain way. On the other hand, mutation is necessary, because it isthe only way to introduce new gene material. In Table 12 the simulationresults without mutation (mutation probability = 0) can be found.It can be seen, that GA supplies better solutions when using mutation. Asmall value influences the children in positive way. Thats why the mu-tation probability should be kept small. For the simulated scenario, theoptimal value for mutation probability is 10%.
Figure 21: Effect of Mutation Probability to the GA
5 RESULTS 60
5.2.5 Recombination Probability
5.2.5.1 Uniform Crossover
Parameter range: 50 .. 90%
Table 13: Simulation results Recombination Probability (uniform crossover)GA
The recombination probability should be kept large in general (50 to 90%are recommended in literature). Such high values should be taken toforce the recombination to produce preferably very new children; inother words, the children should different to their parents for getting newsolutions. The fact is that recombination probability does not influencethe results of the GA in a strong way, as Figure 22 and Table 13 show.Further analysis (software debugging) showed that the parents are mostlyso similar that it does not influence to the children whether a gene is takenfrom parent 1 or from parent 2. A value of 60% recombination probabilityprovides the best solutions in this analysis.
5 RESULTS 61
Figure 22: Effect of Recombination Probability (uniform crossover) to theGA
5.2.5.2 Multipoint Crossover
Parameter range: 10 .. 200
In this analysis, the effect of the number of multipoints to the results ofthe GA have been tested. Nmulti multipoints generate Nmulti + 1 partsof the chromosome whereas the length of the parts decrease when themultipoints are increasing. It cannot be made general statements for thebest number of multipoints, because it is problem dependent. For thisscenario (624 sectors) a optimum value was found with 100 multipointsas it is shown in Figure 23. Further analysis (software debugging) showedthat with this number of multipoints the length and diversity of the partsproduced new optimal solutions.For a higher amount on multipoints, the multipoint crossover gets similarto the uniform crossover. As can be seen in Figure 23 and Table 14, theresults become worse. That is why both generation methods are com-pared. In the next section (5.2.5.3) you can see a comparison betweenboth crossover methods.
5 RESULTS 62
Table 14: Simulation results Multipoints GA
Figure 23: Effect of Multipoints (Multipoint Crossover) to the GA
5 RESULTS 63
5.2.5.3 Uniform vs. Multipoint Crossover
In this section it is analyzed, which kind of crossover - uniform or multi-point - fits better to our problem.Therefor simulations with 100 multipoints have been made for a recombi-nation probability range from 60% to 90%. The results can be found inTable 15. The uniform crossover results were take from Table 13.
Table 15: Simulation results Multipoints vs. Recombination Probability GA
Figure 24 and 25 show that for both cases (cells and base stations) mul-tipoint crossover offer the better results. This could be explained by so-called building blocks (for detailed information see [14]), which are partsof a chromosome that include good gene material. Using multipointcrossover, these building blocks are better distributed and better solutionsare produced.
5 RESULTS 64
Figure 24: Comparison between uniform and multipoint crossover (node b)
Figure 25: Comparison between uniform and multipoint crossover (sectors)
5 RESULTS 65
5.2.6 Selection Pressure Cm
Parameter range: 1,2 .. 4
Table 16: Simulation results Selection Pressure GA
Cm does not influence the results of the GA in a very strong way as canbe seen from Figure 26 and Table 16. It forces selection to select moregood solutions that is the reason when using a higher value for Cm whythe GA converges faster against the optimum. It should always be takenin consideration, that high values of Cm can lead the GA to local optima.
5 RESULTS 66
Figure 26: Effect of Selection Pressure to the GA
5.2.7 Tournament Selection Factor k
Parameter range: 1 .. 20
The factor k of tournament selection does not influence the results of theGA significantly as Figure 27 and Table 17 show. This is a cognition thathas to be expected. We have to remember that the factor k controls theselection pressure Cm. The factor k has influence on the the convergingbehavior. This means that it makes the GA converging faster. This factoffers the possibility to reduce the number of iterations.That the tournament selection factor does not influence the results meansnot that tournament selection is a wrong choice for the base station opti-mization problem. In fact taking tournament selection offers better resultsthen with roulette wheel selection (see Section 5.5.1) . This probably re-sults from the selection pressure that drives the GA to improve the fitnessof the solutions.Tournament selection cannot be compared directly with roulette wheel se-lection in the way we saw for the crossover mechanisms in Section 5.2.5.3,because there is no parameter for roulette wheel selection (as recombina-tion probability for the crossover mechanisms). So, the comparison canonly be done by comparing the best solution of tournament selection withthe result of the analysis that used roulette wheel selection.
5 RESULTS 67
Table 17: Simulation results Tournament Selection Factor GA
Figure 27: Effect of Tournament Selection Factor to the GA
5 RESULTS 68
5.3 Tabu Search
5.3.1 Iterations
Parameter range: 0 .. 200
Table 18: Simulation results Iterations TS
The number of iterations is a very important factor when using TS. Thereis a very high influence on the result, because TS only accepts a solutionas the best one, if it is better then the currently stored one. Thus, theresult can only get better when performing more iterations.It has to be taken in consideration that adding more iterations causeslonger calculation times. Figure 28 and Table 18 show that with moreiterations the result hardly gets better. 100 Iterations is a good compro-mise between the quality of the result and acceptable calculation times.
Note: The criterion for the best solution is the number of base stations.The number of antennas does not need to drop steady, because a solutionwith more antennas and fewer base stations is the better solution.
5 RESULTS 69
Figure 28: Effect of Iterations to TS
5.3.2 Generation Probability
Parameter range: 10 .. 50%
As can be seen from Figure 29, the generation probability influences theresults of TS very strong. For high values ( > 40%) the solutions becomevery bad. This means that nearly all base stations are active (see Ta-ble 19). For explaining this phenomenon, we have to watch the neighborgeneration mechanism. It inverts the base stations of the best solutionwith a certain generation probability if it is in the tabu list. So, if highvalues are used, the good solutions are quasi inverted and become worsesolutions.This means that the values for the generation probability should be keptsmall. The analysis show, that a generation probability of 10% offers thebest results for our kind of problem.
5 RESULTS 70
Table 19: Simulation results Generation Probability TS
Figure 29: Effect of Generation Probability to TS
5 RESULTS 71
5.3.3 Neighbors
Parameter range: 10 .. 50
As can be seen from Figure 30 and Table 20, the number of neighborsdoes not influence the result of TS in a very strong way. This is a insightthat was not expected, because more neighbors mean more solutions,whatincreases the probability to find good solutions.
Table 20: Simulation results Number of Neighbors TS
5 RESULTS 72
The fact that the results are nearly independent from the number of neigh-bors is thereby explained that the neighbors are all produced out of onesolution, scilicet out of the currently best solution. The generation prob-ability is very small. This means that all produced neighbors are verysimilar. So it is not very important, to increase the number of neighbors.Furthermore, increasing the number of neighbors has a very negative side-effect. Because of the similarity of the results, very often solutions withthe same number of bases stations and antennas (not equal solutions!) areproduced and therefor the covered area has to be calculated for findingthe best neighbor. That causes very long calculation times ( about 9 to10 hours). Figure 30 shows that 20 neighbors offered the best results.
Figure 30: Effect of Neighbors to TS
5 RESULTS 73
5.3.4 Frequency Factor
Parameter range: 1 .. 3
Table 21: Simulation results Frequency Factor TS
5 RESULTS 74
Figure 31 and Table 21 show, that the frequency restriction hardly in-fluences the results of TS. Again, this can be explained by the use ofthe generation mechanism. The frequency restriction says: frequency r N . Thus, the recency factordefines how long (number of iterations) the value of a base station withina solution is tabu. N denotes the number of sectors which is 624 for thisanalysis. So, the recency factor was chosen relatively small.
5 RESULTS 75
Table 22: Simulation results Recency Factor TS
Figure 32 shows that the number of base stations and accordingly thenumber of antennas increase, when the recency factor becomes higher. Ahigh recency factor means that in the beginning of the optimization, thetabu list is empty ( = nothing is tabu) for a high number of iterations.Later on, the tabu-list becomes very full. The aspiration criterion preventsthat the tabu list gets completely full. Thus, only a few new solutionscan be generated, and the probability of finding good solutions decreases.Table 22 shows that a recency factor f of 0,01 provides the best solutionsfor this scenario.
5 RESULTS 76
Figure 32: Effect of Recency Factor to TS
5.3.6 Init Probability
Parameter range: 10 .. 90%
Figure 33: Effect of Init Probability to TS
5 RESULTS 77
Figure 33 shows the effect of the init probability. In general a conclusioncannot be drawn, how the init probability should be chosen, because itis problem and situation depended. Figure 33 and Table 23 show thatthe optimum lies between 40 and 50%. This can be explained therewiththat the resulting solutions include about the half number of base stationsfrom the possible ones. So, if we initialize with 50%, the neighbors thatare produced will be good solutions, because they are very similar to theinit solution (because the generation probability is very low), and the taburestrictions guide the solution to a optimum value.
Table 23: Simulation results Init Probability TS
5 RESULTS 78
5.4 t-Test
For comparing the results of GA and TS, a t-test was made. In this test,a t-value is calculated via following equation:
t =|x y|
(nx 1)2x + (ny 1)2ynxny(nx + ny 2)
nx + ny(15)
Table 24: t-test variables
Variable Description
{x1, x2, ..., xnx} Test series of algorithm Xnx Number of simulations of algorithm Xx Mean of test series X2x Variance of test series X
{y1, y2, ..., yny} Test series of algorithm Yny Number of simulations of algorithm Yy Mean of test series Y2y Variance of test series Y
For a level of significance (error probability) a limiting value t,n (wheren = nx + ny 2) has to be taken from a standardized table (see [10]).
If t > t,n, the difference between x and y is significant (with an errorprobability ) and it can be decided, which algorithm is the better one.
In the other case (t t,n), no statement can be given.
For the performing of the t-test, the parameters which offered the bestresults of the separate algorithms (see Section 5.5.1) were taken. Thepopulation size of the GA was increased, so that the calculation timesare equal. Table 25 shows the optimization parameters for the t-test.31 simulations were done with