Embed Size (px)
Citation preview
DISEÑO E IMPLEMENTACIÓN DE UNA SEÑAL DE TRÁNSITO INTELIGENTE
DE PROHIBIDO PARQUEAR PARA LA DETECCIÓN DE VEHÍCULOS
INFRACTORES
OSCAR DAVID CASALLAS RODRÍGUEZ
HÉCTOR HERNÁN NARANJO POTES
UNIVERSIDAD DISTRITAL “FRANCISCO JOSÉ DE CALDAS”
FACULTAD TECNOLÓGICA
INGENIERÍA EN TELECOMUNICACIONES
BOGOTÁ DC
COLOMBIA
2017
HOJA DE ACEPTACIÓN
DISEÑO E IMPLEMENTACIÓN DE UNA SEÑAL DE TRÁNSITO INTELIGENTE
DE PROHIBIDO PARQUEAR PARA LA DETECCIÓN DE VEHÍCULOS
INFRACTORES
Observaciones:
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
____________________________________________________________
___________________________________
Director del Proyecto
Ing. Esperanza Camargo Casallas
___________________________________
Jurado 1
___________________________________
Jurado 2
Fecha de presentación: Abril de 2017.
Resumen
Este proyecto consiste en una señal de tránsito inteligente de prohibido parquear
la cual ayude a prevenir imposición de comparendos, también fomentar
pedagógicamente el respeto a las señales de tránsito por parte de los
conductores. Esta señal de tránsito es idéntica a las que nos encontramos en la
calle, la diferencia es que esta lleva anclado un cubículo de 10 centímetros de
ancho por 20 de alto en su parte trasera. Este cubículo contiene una Raspberry Pi
3, y a ella están conectados; una cámara web, un módulo GSM y un router que
establece una red inalámbrica entre la Raspberry Pi 3 y un computador que emula
una central. Esto con el fin de que cuando algún vehículo se estacione en un área
de prohibido parquear, la cámara capte la placa del vehículo tomando una
fotografía y enviando un mensaje de texto alertando al propietario del vehículo que
se encuentra en una zona de prohibido parquear y que por favor retire su vehículo
del lugar, además se envía a la central la imagen con la hora y fecha para que se
genere un informe de prevención.
Este proyecto ha sido desarrollado y supervisado por parte del grupo de
investigación DIGITI de la facultad tecnológica de la Universidad Distrital Francisco
José de Caldas.
Palabras clave: Señal de tránsito, Sistema de comunicación inalámbrica, Análisis
Accidentalidad, Informe de infracción.
Tabla de Contenido
1 INTRODUCCIÓN ........................................... 13
1.1 Planteamiento del problema.................................................................................. 14 1.1.1 Descripción del problema .............................................................................................................. 14
1.1.2 Identificación del problema .......................................................................................................... 14
1.2 Justificación ........................................................................................................... 14
1.3 Objetivos ................................................................................................................ 15 1.3.1 Objetivo General ........................................................................................................................... 15
1.3.2 Objetivos Específicos ..................................................................................................................... 15
1.4 Marco de Referencia .............................................................................................. 15 1.4.1 Estado del arte .............................................................................................................................. 15
1.4.2 Marco Teórico ............................................................................................................................... 21
1.4.2.1 Señales de tránsito............................................................................................................... 21
1.4.2.2 Señales de tránsito inteligentes ........................................................................................... 27
1.4.2.3 Python .................................................................................................................................. 28
1.4.2.4 OpenCv................................................................................................................................. 30
1.4.2.5 Visión Artificial: .................................................................................................................... 32
1.4.2.6 Cmake .................................................................................................................................. 33
1.4.2.7 FTP: ...................................................................................................................................... 34
1.4.2.8 Raspberry Pi 3 modelo B ...................................................................................................... 34
1.4.2.9 PI camera 2.1 ....................................................................................................................... 35
1.4.2.10 Web Cam.............................................................................................................................. 36
1.4.2.11 Telefónica Móvil................................................................................................................... 36
1.4.2.12 Módulo SIM 800L ................................................................................................................. 37
1.4.2.13 Servicio general paquetes vía radio (GPRS) ......................................................................... 37
1.4.2.14 Comandos AT o conjunto de comandos Hayes .................................................................... 37
1.4.2.15 Módulo LM2596 convertidor de Voltaje DC-DC de 1.25 V – 35 V ....................................... 38
2 METODOLOGÍA ........................................... 39
2.1 Etapa de información ............................................................................................. 39
2.2 Etapa de detección del vehículo y captura de la imagen: ................................... 40
2.3 Etapa de procesamiento de la imagen y detección de la placa .......................... 42 2.3.1 Adquisición de la imagen ............................................................................................................... 43
2.3.2 Modificación en el color de una imagen. Escala de grises ............................................................ 44
2.3.3 Binarización ................................................................................................................................... 44
2.3.4 Segmentación ................................................................................................................................ 45
2.3.5 Detección de bordes...................................................................................................................... 46
2.3.6 Método Canny ............................................................................................................................... 46
2.3.7 Eliminación de regiones según su área ......................................................................................... 47
2.3.8 Adelgazamiento de componentes ................................................................................................. 48
Lista de Figuras
Fig. 1 Señal reglamentaria de paradero SR-40. ................................................... 22
Fig. 2 Señal reglamentaria de velocidad máxima SR-30. ..................................... 22
Fig. 3 Señal de circulación prohibida de peatones SR-20. ................................... 23
Fig. 4 Señal preventiva de zona escolar SP-47. ................................................... 24
Fig. 5 Señal preventiva de ciclistas en la vía SP-59. ............................................ 24
Fig. 6 Señal preventiva de semáforo SP-23. ........................................................ 25
Fig. 7 Señal informativa de Iglesia SI-20. ............................................................. 25
Fig. 8 Señal informativa de primeros auxilios SI-16. ............................................ 26
Fig. 9 Señal informativa de cruce peatonal. ......................................................... 26
Fig. 10 Semáforo Inteligente (Proyecto SEMA) de Asunción. .............................. 27
Fig. 11 Funciones de OpenCV. ............................................................................ 31
Fig. 12 Categorías de OpenCV. ........................................................................... 32
Fig. 13 Imagen sobre visión artificial. ................................................................... 33
Fig. 14 Raspberry Pi 3 modelo B. ......................................................................... 34
Fig. 15 Pi Camera V2.1. ....................................................................................... 35
Fig. 16 Web Cam. ................................................................................................ 36
Fig. 17 Módulo SIM800L. ..................................................................................... 37
Fig. 18. Módulo LM2596. ...................................................................................... 38
Fig. 19 Diagrama de bloques de la solución......................................................... 39
Fig. 20 Diagrama de flujo de la etapa 2.2. ............................................................ 40
Fig. 21 Imagen indicando que no hay carro detectado. ........................................ 41
Fig. 22 Imagen indicando que hay un carro detectado. ........................................ 41
Fig. 23 Diagrama de flujo de la etapa 2.3. ............................................................ 42
Fig. 24 Etapas del procesamiento de una imagen. .............................................. 43
Fig. 25 Imagen inicial en escala de grises. ........................................................... 44
Fig. 26 Imagen inicial binarizada. ......................................................................... 45
Fig. 27 Imagen Binarizada y etiquetada. .............................................................. 47
Fig. 28 Imagen con los contornos eliminados. ..................................................... 48
Fig. 29 Imagen inicial con su respectiva placa detectada. ................................... 49
Fig. 30 Etapas del ingreso del infractor al sistema. .............................................. 50
Fig. 31 Interfaz de usuario para el ingreso de los datos del vehículo. .................. 51
Fig. 32 Forma de ingresar un registro a la base de datos. ................................... 51
Fig. 69 Registro de vehículos y búsqueda. .......................................................... 76
Fig. 70 Informe detallado. ..................................................................................... 77
Fig. 71 Diagrama de funcionamiento del dispositivo ............................................ 78
Fig. 72 Dispositivos utilizados. ............................................................................. 79
Fig. 73 Vehículo muy cerca de la cámara ............................................................ 80
Fig. 74 Ángulo de la placa .................................................................................... 81
Fig. 75 Ruido en la imagen capturada por la cámara. .......................................... 81
Fig. 76 Estadísticas de imágenes de placas cargadas en el algoritmo. ............... 82
Fig. 77 Estadísticas imágenes de placas impresas. ............................................. 83
Fig. 78 Estadísticas placas reales. ....................................................................... 84
Fig. 79 Estadística total del sistema con las diferentes pruebas. ......................... 85
Fig. 80 Confiabilidad Total. ................................................................................... 86
1 Introducción
Este proyecto surge como una forma de concientizar a las personas en el respeto
hacia las señales de tránsito y se quiere dar unos llamados de atención para
generar conciencia en los ciudadanos mostrando que si cada uno pone de su
parte se podría tener una ciudad más prospera y agradable a la hora de transitar
por ella. Además, se quiere incentivar a otros profesionales de las diferentes áreas
del conocimiento para no descuidar un aspecto tan importante como lo es la
movilidad en la ciudad y el país.
Todo el proceso de este proyecto comienza con el encendido de nuestra
Raspberry Pi 3 con ella se encienden el módulo GSM, la cámara web, por otra
parte, hay que encender el router, el computador que emulará la central. Cuando
la cámara está encendida y algún vehículo se estaciona en su área, la cámara
detecta el color amarillo y automáticamente toma una fotografía.
Después de tomar la fotografía se realiza un procesamiento de imagen para
detectar los caracteres de la placa del vehículo, esta imagen debe pasar por una
escala de grises, por una binarización, por un filtro canny, una extracción de
contornos y un reconocimiento de patrones para lograr conseguir una detección de
caracteres de la manera más eficiente posible. Para realizar este procesamiento
se hace uso del lenguaje de programación Python y de la librería OpenCV.
El siguiente paso después de tener los caracteres de la placa del vehículo es
realizar una comparación de la placa detectada con las placas ingresadas y con su
respectivo número de celular, luego de conocer el número asociado a la placa
detectada, lo siguiente es hacer uso del módulo GSM SIM 800 L para enviar un
mensaje de texto preventivo al propietario del vehículo informándole que se
encuentra en un espacio de prohibido parquear y que por favor se retire del lugar.
Por último, se hace uso del router 3COM que genera una red inalámbrica con el
computador que emula una central. A este router se anclan de forma inalámbrica
el computador y la Raspberry Pi 3 haciendo uso cada uno de su módulo Wi-Fi y
así enviar la imagen capturada con la hora, fecha y lugar dónde está o estaba mal
estacionado el vehículo. Dicho envío de archivos se realiza por medio del
protocolo de transferencia de archivos (FTP). Con los datos enviados a la central
Además, se espera que en un futuro se pueda igualar o dar ejemplo de ciudad con
movilidad inteligente como ya lo es Utah en los Estados Unidos que ha sido en
estos momentos de gran ejemplo para el mundo en este tema, por ello se toma
esta ciudad como ejemplo para mejorar y para contribuir en el bienestar de todos
los Bogotanos.
Por último, el grupo de investigación DIGITI de la Universidad Distrital Francisco
José De Caldas desea abrir un nuevo campo de investigación en un área tan
importante como lo es el tráfico y la movilidad de vehículos. Aparte de esto que su
aporte pueda servir para contribuir al desarrollo de la Universidad, de la ciudad y
de todo el país, como también de incentivar a otras personas que desarrollen más
proyectos de investigación en esta área.
1.3 Objetivos
1.3.1 Objetivo General
Diseñar e implementar una señal de tránsito inteligente de prohibido parquear para
la detección de vehículos infractores.
1.3.2 Objetivos Específicos
• Adaptar una señal de tránsito reglamentaria de prohibido parquear a una
señal de tránsito inteligente.
• Identificar la placa del vehículo en la zona de prohibido parquear por medio
de procesamiento de imágenes.
• Enviar un mensaje de texto preventivo al conductor en tiempo real que le
informe que puede ser sancionado.
• Generar un informe de la infracción con las imágenes, hora y lugar en caso
de no atender el mensaje preventivo el cual será enviado a un computador
vía inalámbrica que emule una central.
1.4 Marco de Referencia
1.4.1 Estado del arte
Se ha realizado una búsqueda en diferentes bases de datos con respecto a las
señales de tránsito inteligentes dónde se obtuvieron pocos resultados con
respecto a señales de tránsito. Por tal motivo se ha recolectado información de los
enfoque propuesto y diseñado es la detección del movimiento de los vehículos
sobre la infraestructura vial a partir de información de video, dónde se tiene en
cuenta la imagen capturada y la acción que toma el conductor en el momento de
esquivar el obstáculo. Por lo tanto, se podrá recolectar una buena información que
será enviada a otro conductor que su automóvil cuente con comunicación entre
vehículos, para que al momento de llegar al sitio del obstáculo tome las
respectivas precauciones [2].
De la tecnología en procesamiento de imágenes está el proyecto titulado
Intelligent route selection in road ways. Este proyecto propone a los conductores
una alternativa para esos momentos de tráfico debido al creciente número de
vehículos y el limitado espacio de la vía proporcionado por la infraestructura actual
se ha diseñado un método basado en técnicas de procesamiento de imágenes en
MATLAB.
Principalmente se instala una cámara junto al semáforo, esta cumplirá la función
de medir la densidad de tráfico tomando como referencia la carretera vacía. Cada
vehículo capturado por la cámara será contado y se establecerá un promedio de
flujo vehicular que irá refrescando una base de datos en SQL a través de señales
de RF en dónde se podrá saber si tal flujo se encuentra normal o se encuentra en
congestión. También se cuenta con una página WEB en que el usuario se registra
con nombre, número de celular y las rutas más frecuentes, con esto el usuario
podrá recibir un mensaje de texto con la indicación del flujo de tráfico al lugar
hacia dónde se dirige. Con ello el conductor está en condiciones de tomar alguna
ruta alterna con el fin de reducir el tiempo de destino [3].
Vision-based lane detection for autonomous artificial intelligent vehicles, es un
proyecto el cual presenta una de las tareas más complejas y desafiantes de los
vehículos de carretera futuros, es la detección de carril o los límites de detección
de carretera. Sin embargo, la detección de carril es una tarea difícil debido a las
diferentes condiciones de la carretera que se pueden producir durante la
conducción. En esta investigación se puede alcanzar un funcionamiento en tiempo
real. El sistema adquiere la vista frontal por medio de una cámara montada en el
vehículo. Una fase de Pre-procesamiento desarrollado incluyendo una conversión
de escala de grises, eliminación de ruido, detección de bordes con umbralización
automática, líneas de extracción utilizando la transformada de Hough, líneas o
límites de la carretera provista por hipérbolas.
precisión y robustez junto con una reducción sustancial del tiempo de ejecución,
en comparación con la de los otros métodos [5].
Y por el último traffic video surveillance: vehicle detection and classification. Este
trabajo se centra en el desarrollo de un algoritmo rápido para la detección y
clasificación de vehículos para la vigilancia del tráfico. Aquí, la atención se centra
en la aplicabilidad real de algoritmos de detección y clasificación de vehículos en
densidades de tráfico variables tales como carreteras y ciudades. La detección se
centra únicamente en los vehículos que están en movimiento, la detección de
vehículos estacionados que no son detectados. Es posible que haya sombras de
los vehículos en movimiento, pero tiene que ser excluido de los objetos
detectados.
Después de la detección del número de vehículos tiene que ser contados para el
análisis de la densidad del tráfico en las ciudades y carreteras. En la mayoría de
los lugares, los vehículos pesados están restringidos de viajar a través de las
ciudades y otras zonas de tráfico pesado, que deben ser controlados con la ayuda
de técnicas de visión por ordenador. Así que hay una necesidad de clasificación
de los vehículos, en los que los vehículos se clasifican en vehículos ligeros y
pesados, como el automóvil, camión, etc. Uno de las principales tareas en la
aplicación de estas ideas es la velocidad de los algoritmos. Puesto que hay varios
métodos disponibles para la detección de objetos, la clasificación de imágenes y la
eliminación sombra, se debe combinar de tal manera que todo el sistema debe ser
lo suficientemente rápido para hacer frente a los cambios bruscos en el medio
ambiente para trabajar en tiempo real [6].
Para el tema de inteligencia artificial se tienen los siguientes proyectos. El primero
es Multi-resolution vehicle detection using artificial vision. Este artículo nos habla
acerca de un proyecto el cual se basa en un algoritmo para la detección y
medición de la distancia de vehículos con una sola cámara. El objetivo es detectar
todos los vehículos en la escena: grande, pequeño, a lo ancho y la distancia a los
más cercanos. Así que la búsqueda de vehículos con tamaño variable y la
distancia puede requerir equipos bastante robustos. Por lo tanto, se quiere dar una
solución con dicho algoritmo con una optimización bastante eficiente debido a los
movimientos del vehículo y el ruido que se produce realizando la medición de la
distancia.

Los prometedores resultados obtenidos en las primeras etapas de la investigación
sobre los vehículos inteligentes demuestran que una automatización total del
tráfico (al menos en las autopistas o carreteras suficientemente estructuradas) es
técnicamente factible.
Sin embargo, además de los problemas técnicos, algunas cuestiones deben ser
cuidadosamente consideradas en el diseño de estos sistemas, tales como los
aspectos legales relacionados con la responsabilidad en caso de fallos y
comportamiento incorrecto del sistema, el impacto de la conducción automática de
los pasajeros humanos. Aceptación de los usuarios, en particular, desempeñará
un papel fundamental en cómo los vehículos inteligentes, aspecto, el
funcionamiento y la interfaz del sistema tendrán una fuerte influencia en la forma
en que un usuario ver y entender la funcionalidad del sistema [7].
1.4.2 Marco Teórico
1.4.2.1 Señales de tránsito
Las señales de Tránsito son los signos que se usan en las vías nacionales, los
cuales se encuentran pintados en la calle o ubicados al lado del camino. La
utilización de diferentes colores también es una herramienta clave, dado a que
cada color tiene un significado específico.
Estas señales tienen como objetivo el control del tráfico vehicular y garantizar su
fácil y correcta circulación, tanto en las calles, como en las carreteras, estos
signos o señales ofrecen información a conductores y peatones, que transitan ya
sea por un camino, calle o carretera y van dirigidos en especial a los conductores
de vehículos [8].
Las señales de tránsito se clasifican en:
• Reglamentarias.
• Preventivas.
• Informativas.
En este caso, esta señal indica la velocidad máxima a la que se puede ir
conduciendo, por lo tanto, se debe estar pendiente cuando se vea esta señal,
pues se puede exigir al conductor que la respete para evitar un posible accidente
[11].
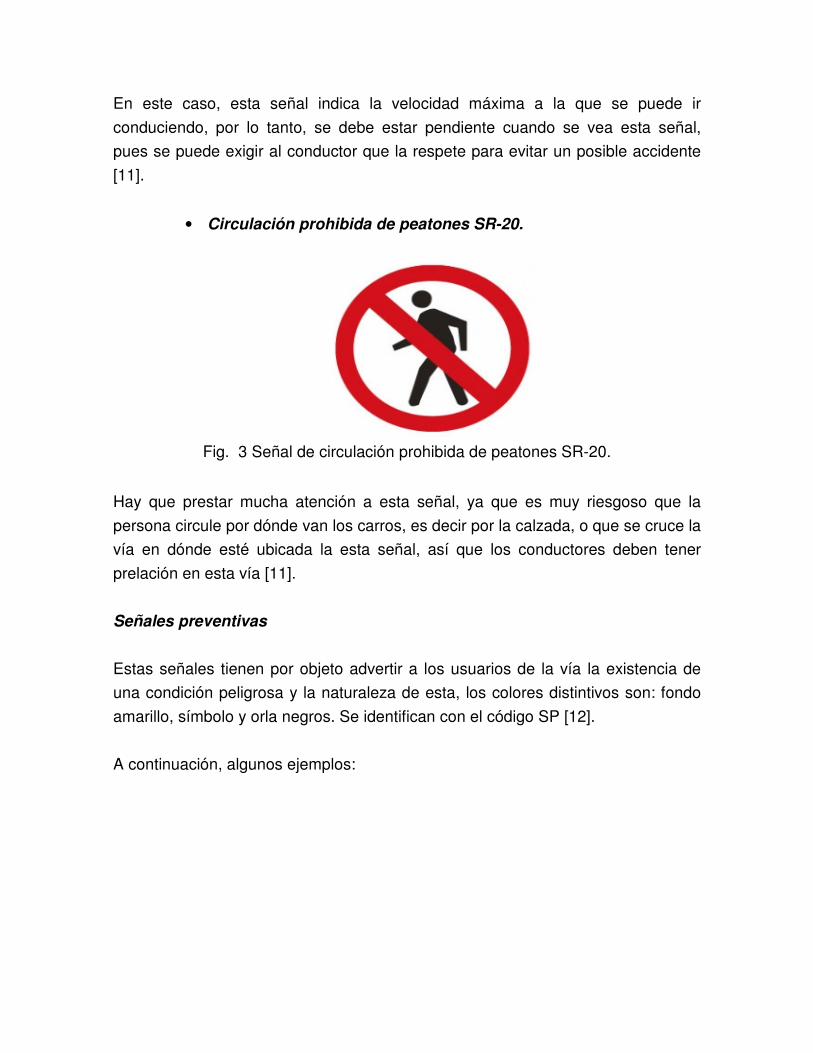
• Circulación prohibida de peatones SR-20.
Fig. 3 Señal de circulación prohibida de peatones SR-20.
Hay que prestar mucha atención a esta señal, ya que es muy riesgoso que la
persona circule por dónde van los carros, es decir por la calzada, o que se cruce la
vía en dónde esté ubicada la esta señal, así que los conductores deben tener
prelación en esta vía [11].
Señales preventivas
Estas señales tienen por objeto advertir a los usuarios de la vía la existencia de
una condición peligrosa y la naturaleza de esta, los colores distintivos son: fondo
amarillo, símbolo y orla negros. Se identifican con el código SP [12].
A continuación, algunos ejemplos:
• Preventiva de semáforo SP-23
Fig. 6 Señal preventiva de semáforo SP-23.
Esta señal indica al conductor que se acerca a un cruce en dónde encontrará un
semáforo, así es que, si uno es el peatón hasta el semáforo se debe ir a cruzar de
manera segura [13].
Señales informativas
Estas señales tienen por objeto guiar al usuario de la vía, suministrándole
información de localidades, destinos, direcciones, sitios especiales, distancias y
prestación de servicios. Los colores distintivos son: fondo azul, textos y flechas
blancos y símbolos negros. Se exceptúan las señales de identificación cuyo fondo
es blanco y símbolos negros. Se identifican con el código SI [14].
Algunas de estas señales son:
• Informativa de Iglesia SI-20.
Fig. 7 Señal informativa de Iglesia SI-20.
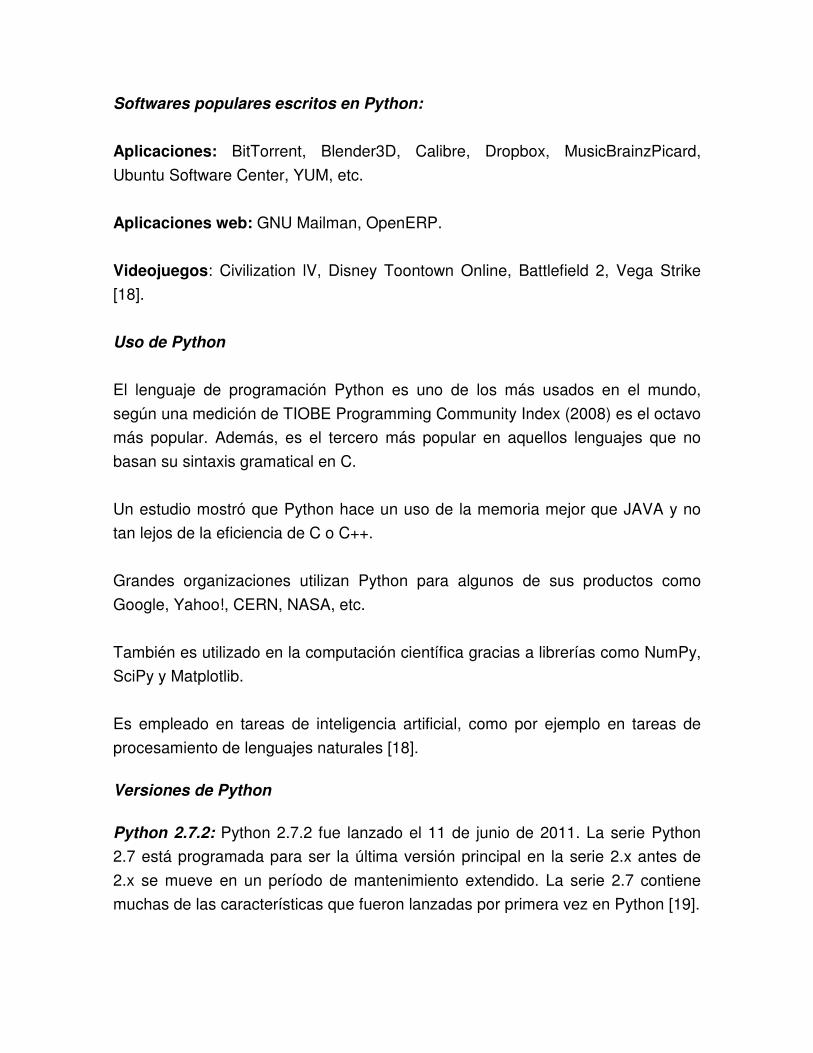
1.4.2.2 Señales de tránsito inteligentes
La señalización inteligente es el sistema de comunicación urbana más idónea y
moderna de la actualidad, porque democratiza la información convirtiéndose en el
medio masivo más efectivo, segmentado y de mejor cubrimiento. Además de
informar y de manera directa, ayuda a los habitantes a obtener una mejor calidad
de vida, a través de tecnologías de punta que mejoran la movilidad, seguridad de
mayor acceso a internet de redes WIFI que proporciona los sistemas de
información [16].
Estas señales reportan temperatura, contaminación ambiental y sonora, poseen
cámaras caza infractores e informa sobre temas atinentes a su interés como
restricciones, pago de impuestos, horarios de buses, rutas, etc. Los sistemas de
información vienen a ser el mejor complemento, porque además de ser un medio
de comunicación urbana que se implanta en el espacio público puede redundar no
solo en los beneficios propios de un proceso de masificación publicitaria sino
también en un esquema de socialización que le permita a la ciudad mejorar la
disposición cívica y el reconocimiento social, tanto de elementos privados, como
de aspectos públicos relevantes que garantizan la eficiencia del medio como
escenario de comunicación [17].
Fig. 10 Semáforo Inteligente (Proyecto SEMA) de Asunción.
Softwares populares escritos en Python:
Aplicaciones: BitTorrent, Blender3D, Calibre, Dropbox, MusicBrainzPicard,
Ubuntu Software Center, YUM, etc.
Aplicaciones web: GNU Mailman, OpenERP.
Videojuegos: Civilization lV, Disney Toontown Online, Battlefield 2, Vega Strike
[18].
Uso de Python
El lenguaje de programación Python es uno de los más usados en el mundo,
según una medición de TIOBE Programming Community Index (2008) es el octavo
más popular. Además, es el tercero más popular en aquellos lenguajes que no
basan su sintaxis gramatical en C.
Un estudio mostró que Python hace un uso de la memoria mejor que JAVA y no
tan lejos de la eficiencia de C o C++.
Grandes organizaciones utilizan Python para algunos de sus productos como
Google, Yahoo!, CERN, NASA, etc.
También es utilizado en la computación científica gracias a librerías como NumPy,
SciPy y Matplotlib.
Es empleado en tareas de inteligencia artificial, como por ejemplo en tareas de
procesamiento de lenguajes naturales [18].
Versiones de Python
Python 2.7.2: Python 2.7.2 fue lanzado el 11 de junio de 2011. La serie Python
2.7 está programada para ser la última versión principal en la serie 2.x antes de
2.x se mueve en un período de mantenimiento extendido. La serie 2.7 contiene
muchas de las características que fueron lanzadas por primera vez en Python [19].

problema de aprendizaje automático. Esta sub librería está especializada en el
reconocimiento estadístico de patrones y Clustering [21].
Fig. 11 Funciones de OpenCV.
Módulos de OpenCV
Algunos de los módulos más utilizados en OpenCV son:
Core: Este es el módulo básico de OpenCV. Incluye las estructuras de datos
básicas y las funciones básicas de procesamiento de imágenes. Este módulo
también es usado por otros módulos como highgui.
Highhui: Este módulo provee interfaz de usuario, códecs de imagen y vídeo y
capacidad para capturar imágenes y vídeo, además de otras capacidades como la
de capturar eventos del ratón…etc.
Imgproc: Este módulo incluye algoritmos básicos de procesado de imágenes,
incluyendo filtrado de imágenes, transformado de imágenes…etc.
Video: Este módulo de análisis de vídeo incluye algoritmos de seguimiento de
objetos, entre otros.
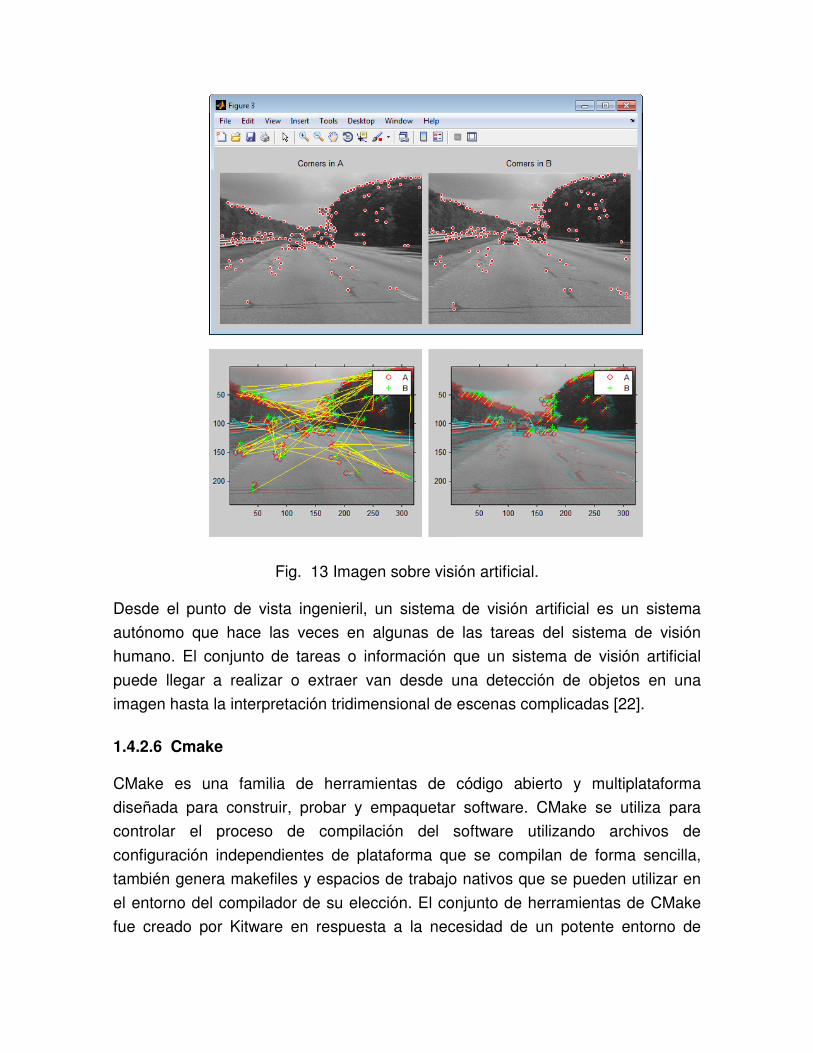
Fig. 13 Imagen sobre visión artificial.
Desde el punto de vista ingenieril, un sistema de visión artificial es un sistema
autónomo que hace las veces en algunas de las tareas del sistema de visión
humano. El conjunto de tareas o información que un sistema de visión artificial
puede llegar a realizar o extraer van desde una detección de objetos en una
imagen hasta la interpretación tridimensional de escenas complicadas [22].
1.4.2.6 Cmake
CMake es una familia de herramientas de código abierto y multiplataforma
diseñada para construir, probar y empaquetar software. CMake se utiliza para
controlar el proceso de compilación del software utilizando archivos de
configuración independientes de plataforma que se compilan de forma sencilla,
también genera makefiles y espacios de trabajo nativos que se pueden utilizar en
el entorno del compilador de su elección. El conjunto de herramientas de CMake
fue creado por Kitware en respuesta a la necesidad de un potente entorno de

• Procesador ARMv8 de cuatro núcleos de 1,2 GHz de 64 bits.
• 802.11n Wireless LAN.
• Bluetooth 4.1 Low Energy (BLE).
• 4 puertos USB.
• 40 pines GPIO.
• Puerto lleno de HDMI.
• Puerto Ethernet.
• Conector de audio de 3,5 mm combinado y vídeo compuesto.
• Interfaz de la cámara (CSI).
• Interfaz de pantalla (DSI).
• Ranura para tarjetas micro SD (ahora push-pull en lugar de push-
push).
• VideoCore IV 3D núcleo de gráficos [25].
1.4.2.9 PI camera 2.1
El módulo de la cámara de la Raspberry Pi 3 se utiliza para tomar video de alta
definición, así como imágenes fijas, es muy fácil de utilizar, pero tiene mucho que
ofrecer a los usuarios ya que hay bastantes ejemplos en línea de personas que lo
usan para bastantes aplicaciones como lo son la seguridad en el hogar y en la
vida silvestre como lo son las cámaras trampa [26].
Fig. 15 Pi Camera V2.1 [26].
teléfono móvil o teléfono celular que dispone de una sim card y de un operador
móvil el cual provee el servicio de telefonía [28].
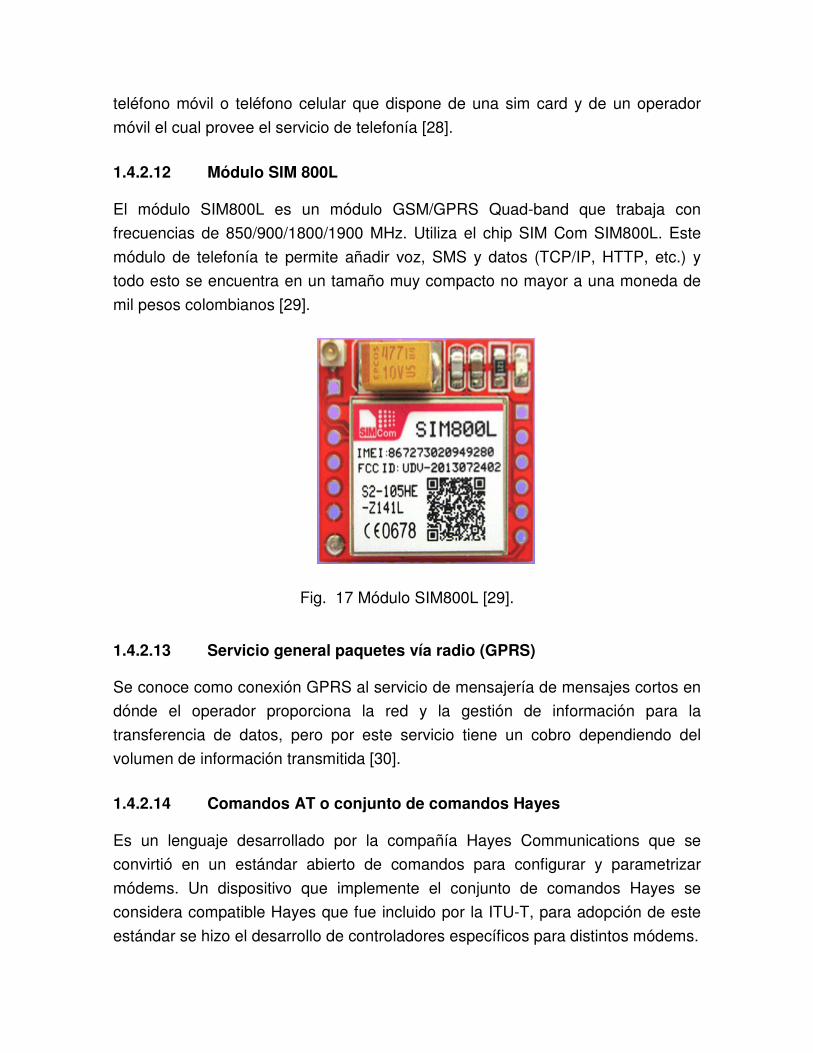
1.4.2.12 Módulo SIM 800L
El módulo SIM800L es un módulo GSM/GPRS Quad-band que trabaja con
frecuencias de 850/900/1800/1900 MHz. Utiliza el chip SIM Com SIM800L. Este
módulo de telefonía te permite añadir voz, SMS y datos (TCP/IP, HTTP, etc.) y
todo esto se encuentra en un tamaño muy compacto no mayor a una moneda de
mil pesos colombianos [29].
Fig. 17 Módulo SIM800L [29].
1.4.2.13 Servicio general paquetes vía radio (GPRS) Se conoce como conexión GPRS al servicio de mensajería de mensajes cortos en
dónde el operador proporciona la red y la gestión de información para la
transferencia de datos, pero por este servicio tiene un cobro dependiendo del
volumen de información transmitida [30].
1.4.2.14 Comandos AT o conjunto de comandos Hayes
Es un lenguaje desarrollado por la compañía Hayes Communications que se
convirtió en un estándar abierto de comandos para configurar y parametrizar
módems. Un dispositivo que implemente el conjunto de comandos Hayes se
considera compatible Hayes que fue incluido por la ITU-T, para adopción de este
estándar se hizo el desarrollo de controladores específicos para distintos módems.
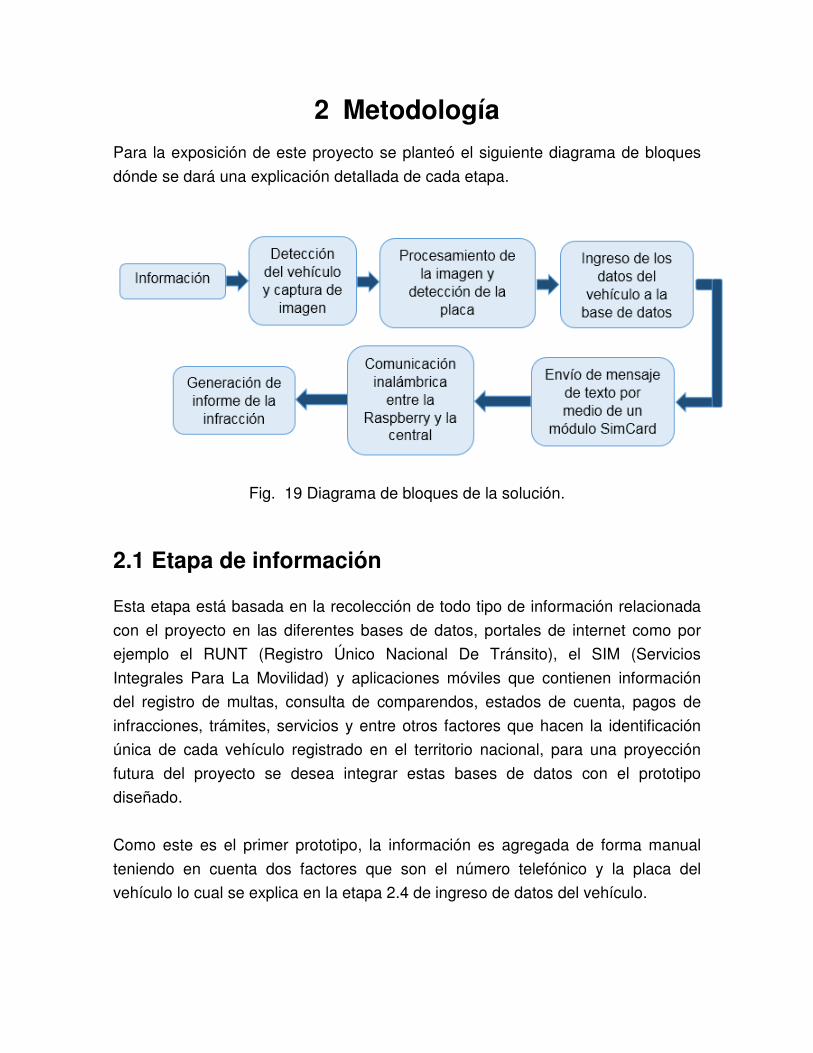
2 Metodología Para la exposición de este proyecto se planteó el siguiente diagrama de bloques
dónde se dará una explicación detallada de cada etapa.
Fig. 19 Diagrama de bloques de la solución.
2.1 Etapa de información
Esta etapa está basada en la recolección de todo tipo de información relacionada
con el proyecto en las diferentes bases de datos, portales de internet como por
ejemplo el RUNT (Registro Único Nacional De Tránsito), el SIM (Servicios
Integrales Para La Movilidad) y aplicaciones móviles que contienen información
del registro de multas, consulta de comparendos, estados de cuenta, pagos de
infracciones, trámites, servicios y entre otros factores que hacen la identificación
única de cada vehículo registrado en el territorio nacional, para una proyección
futura del proyecto se desea integrar estas bases de datos con el prototipo
diseñado.
Como este es el primer prototipo, la información es agregada de forma manual
teniendo en cuenta dos factores que son el número telefónico y la placa del
vehículo lo cual se explica en la etapa 2.4 de ingreso de datos del vehículo.

Fig. 21 Imagen indicando que no hay carro detectado.
Esta imagen ilustra que la cámara está encendida y arroja un mensaje el cual dice:
“Carro no detectado” comprobando que no hay un vehículo estacionado en el área
de prohibido parquear. Enseguida se busca un vehículo que sirva de ejemplo para
la prueba como lo vemos en la siguiente imagen.
Fig. 22 Imagen indicando que hay un carro detectado.
Como se puede ver en la imagen anterior ya se ha detectado un vehículo, el
siguiente paso es tomar una imagen para realizar el respectivo reconocimiento de
la placa del vehículo y proceder a enviar el mensaje de texto que estará explícito
en las siguientes etapas.
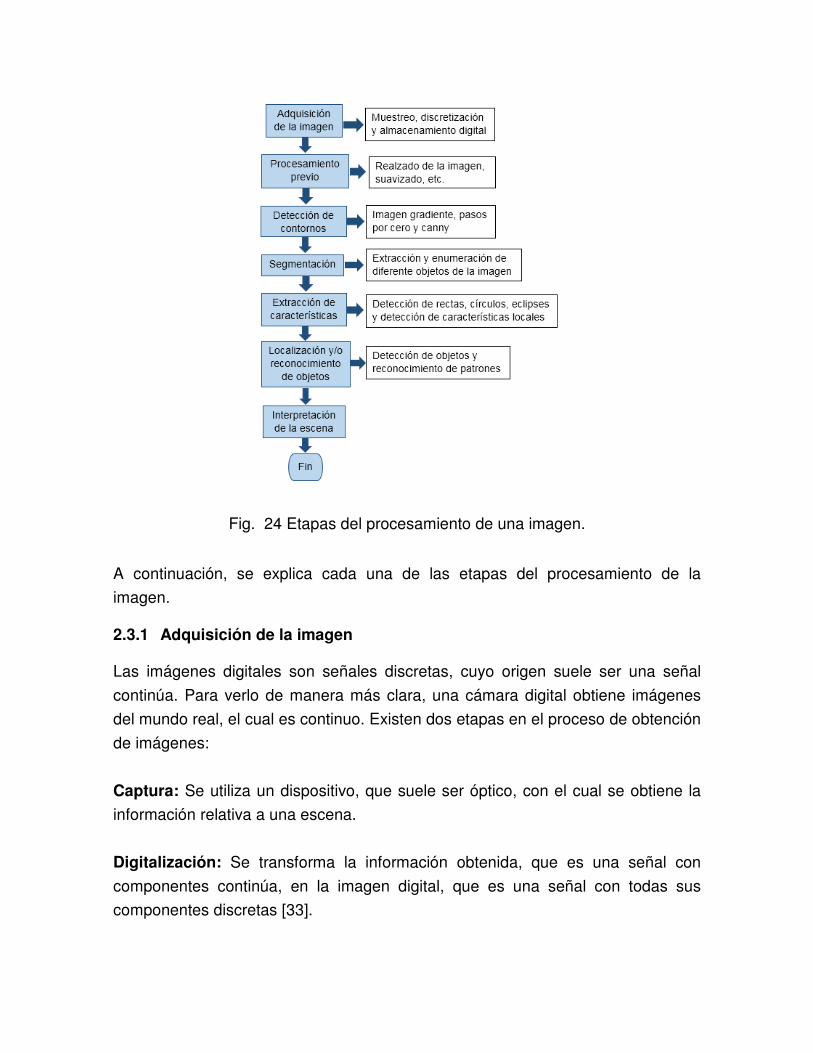
Fig. 24 Etapas del procesamiento de una imagen.
A continuación, se explica cada una de las etapas del procesamiento de la
imagen.
2.3.1 Adquisición de la imagen Las imágenes digitales son señales discretas, cuyo origen suele ser una señal
continúa. Para verlo de manera más clara, una cámara digital obtiene imágenes
del mundo real, el cual es continuo. Existen dos etapas en el proceso de obtención
de imágenes:
Captura: Se utiliza un dispositivo, que suele ser óptico, con el cual se obtiene la
información relativa a una escena.
Digitalización: Se transforma la información obtenida, que es una señal con
componentes continúa, en la imagen digital, que es una señal con todas sus
componentes discretas [33].
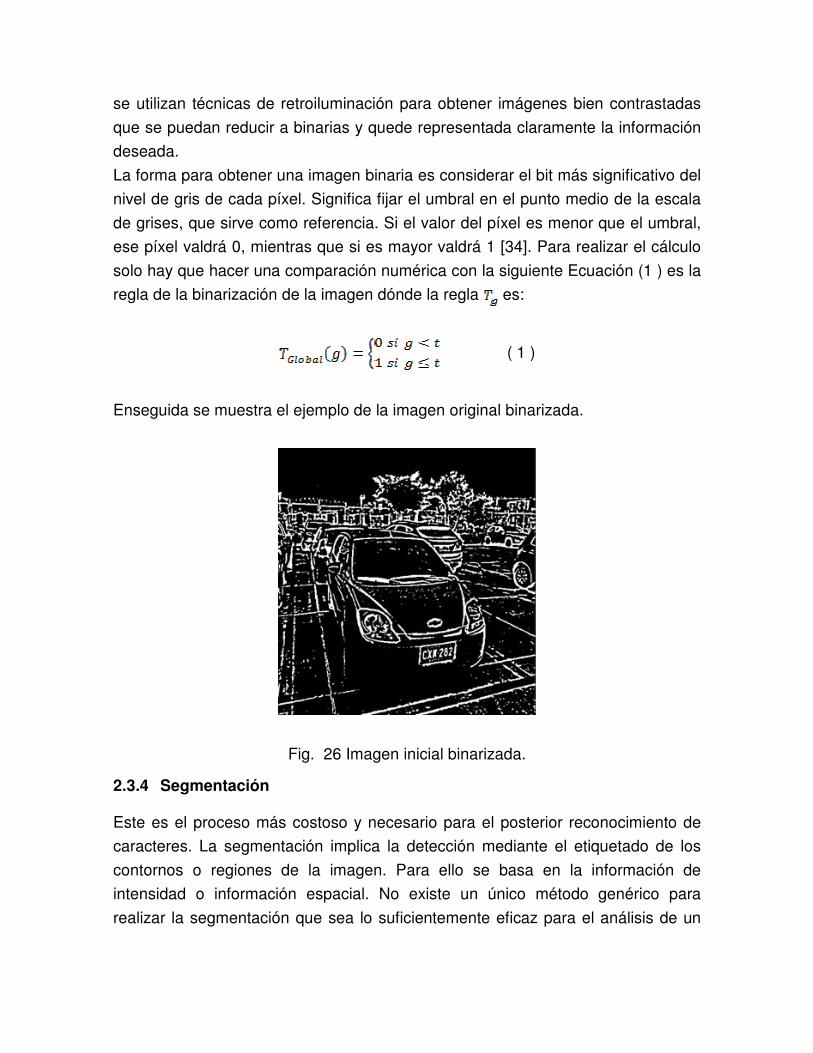
se utilizan técnicas de retroiluminación para obtener imágenes bien contrastadas
que se puedan reducir a binarias y quede representada claramente la información
deseada.
La forma para obtener una imagen binaria es considerar el bit más significativo del
nivel de gris de cada píxel. Significa fijar el umbral en el punto medio de la escala
de grises, que sirve como referencia. Si el valor del píxel es menor que el umbral,
ese píxel valdrá 0, mientras que si es mayor valdrá 1 [34]. Para realizar el cálculo
solo hay que hacer una comparación numérica con la siguiente Ecuación (1 ) es la
regla de la binarización de la imagen dónde la regla es:
( 1 )
Enseguida se muestra el ejemplo de la imagen original binarizada.
Fig. 26 Imagen inicial binarizada.
2.3.4 Segmentación Este es el proceso más costoso y necesario para el posterior reconocimiento de
caracteres. La segmentación implica la detección mediante el etiquetado de los
contornos o regiones de la imagen. Para ello se basa en la información de
intensidad o información espacial. No existe un único método genérico para
realizar la segmentación que sea lo suficientemente eficaz para el análisis de un
( 3 )
3. Direcciones de los bordes locales dónde la ecuación (4) es la detección de
los bordes locales.
( 4 )
4. Se determinan los máximos locales de las magnitudes del gradiente. [30]
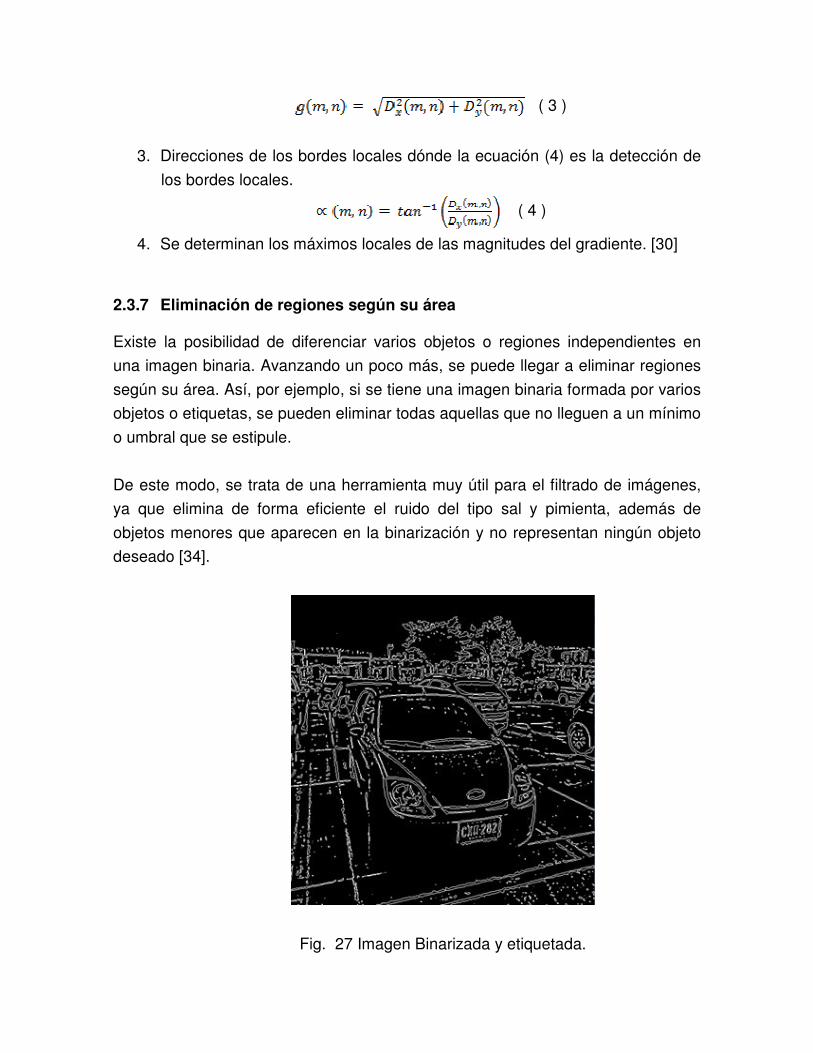
2.3.7 Eliminación de regiones según su área Existe la posibilidad de diferenciar varios objetos o regiones independientes en
una imagen binaria. Avanzando un poco más, se puede llegar a eliminar regiones
según su área. Así, por ejemplo, si se tiene una imagen binaria formada por varios
objetos o etiquetas, se pueden eliminar todas aquellas que no lleguen a un mínimo
o umbral que se estipule.
De este modo, se trata de una herramienta muy útil para el filtrado de imágenes,
ya que elimina de forma eficiente el ruido del tipo sal y pimienta, además de
objetos menores que aparecen en la binarización y no representan ningún objeto
deseado [34].
Fig. 27 Imagen Binarizada y etiquetada.
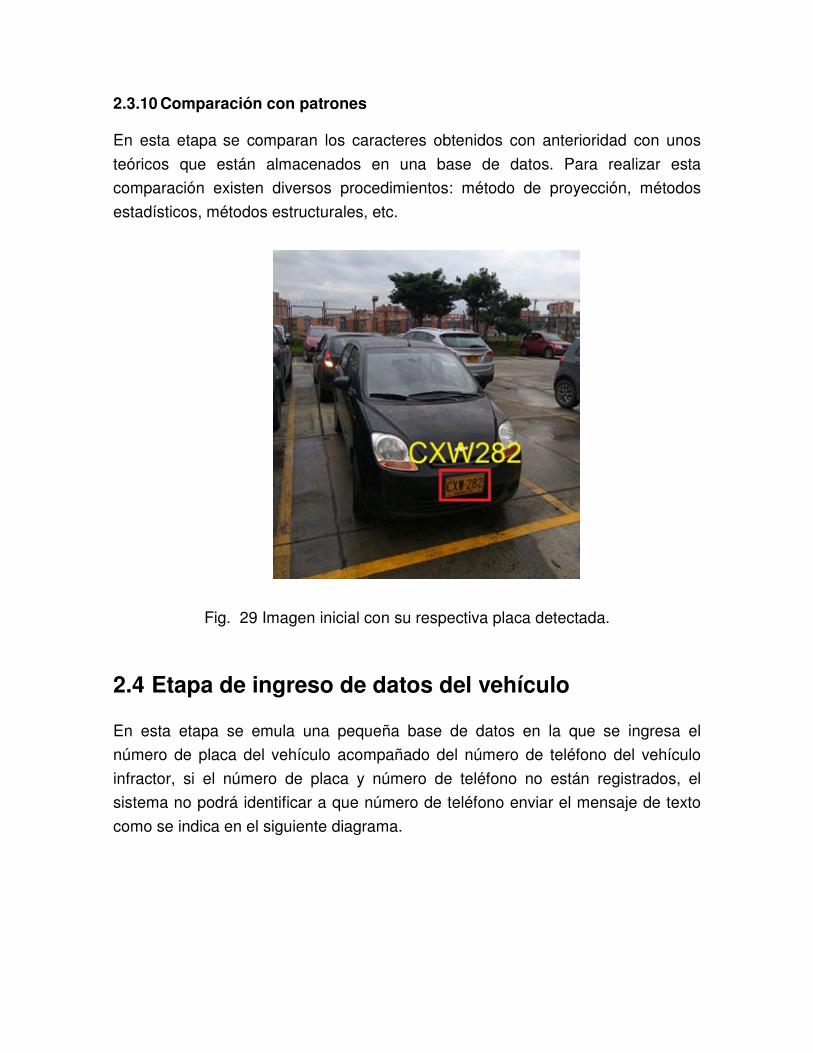
2.3.10 Comparación con patrones En esta etapa se comparan los caracteres obtenidos con anterioridad con unos
teóricos que están almacenados en una base de datos. Para realizar esta
comparación existen diversos procedimientos: método de proyección, métodos
estadísticos, métodos estructurales, etc.
Fig. 29 Imagen inicial con su respectiva placa detectada.
2.4 Etapa de ingreso de datos del vehículo
En esta etapa se emula una pequeña base de datos en la que se ingresa el
número de placa del vehículo acompañado del número de teléfono del vehículo
infractor, si el número de placa y número de teléfono no están registrados, el
sistema no podrá identificar a que número de teléfono enviar el mensaje de texto
como se indica en el siguiente diagrama.
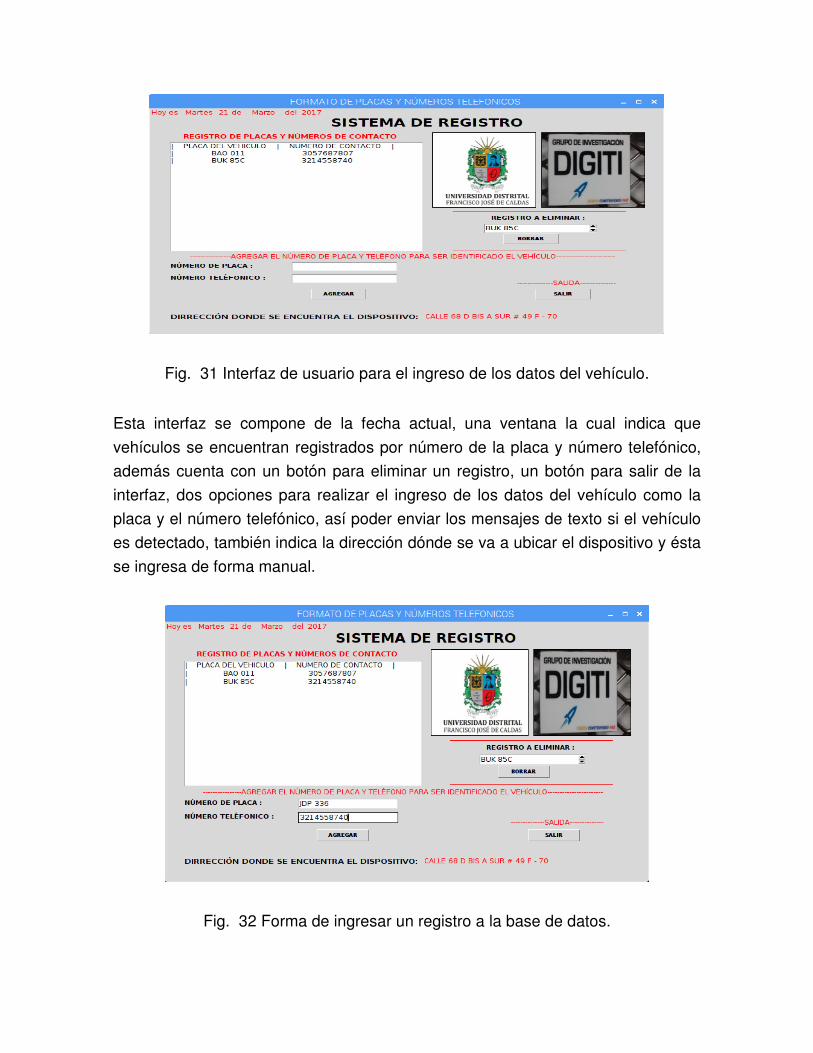
Fig. 31 Interfaz de usuario para el ingreso de los datos del vehículo.
Esta interfaz se compone de la fecha actual, una ventana la cual indica que
vehículos se encuentran registrados por número de la placa y número telefónico,
además cuenta con un botón para eliminar un registro, un botón para salir de la
interfaz, dos opciones para realizar el ingreso de los datos del vehículo como la
placa y el número telefónico, así poder enviar los mensajes de texto si el vehículo
es detectado, también indica la dirección dónde se va a ubicar el dispositivo y ésta
se ingresa de forma manual.
Fig. 32 Forma de ingresar un registro a la base de datos.
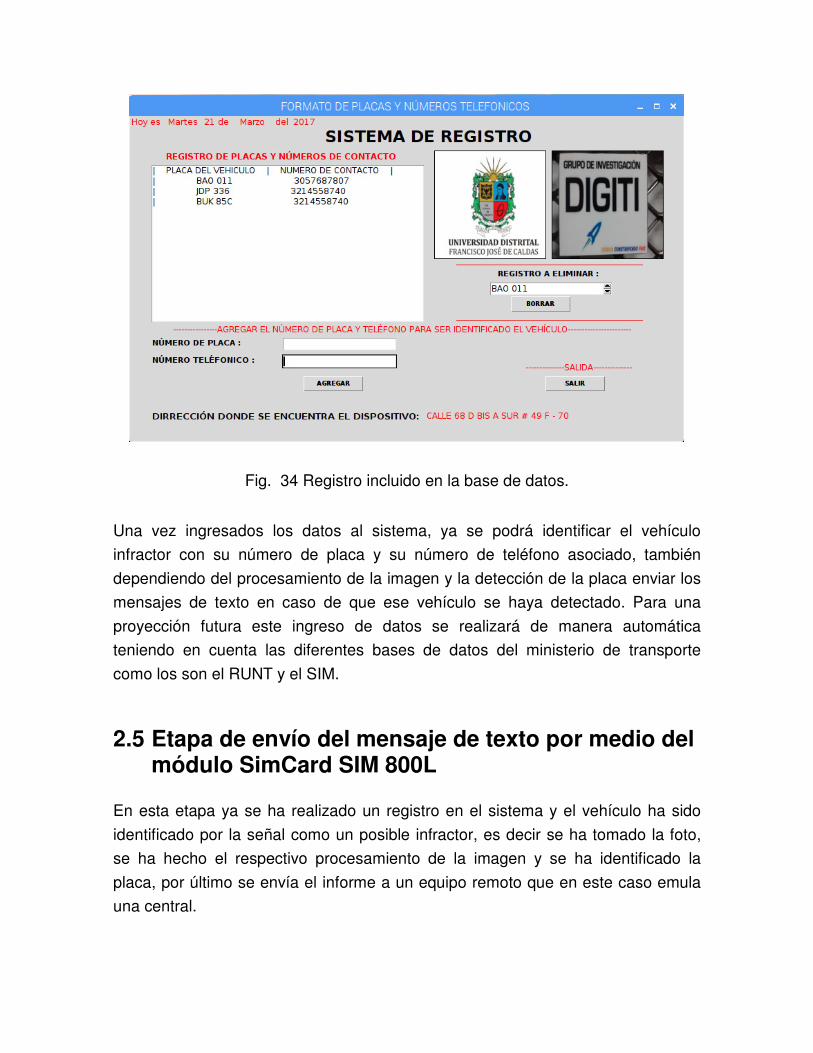
Fig. 34 Registro incluido en la base de datos.
Una vez ingresados los datos al sistema, ya se podrá identificar el vehículo
infractor con su número de placa y su número de teléfono asociado, también
dependiendo del procesamiento de la imagen y la detección de la placa enviar los
mensajes de texto en caso de que ese vehículo se haya detectado. Para una
proyección futura este ingreso de datos se realizará de manera automática
teniendo en cuenta las diferentes bases de datos del ministerio de transporte
como los son el RUNT y el SIM.
2.5 Etapa de envío del mensaje de texto por medio del módulo SimCard SIM 800L
En esta etapa ya se ha realizado un registro en el sistema y el vehículo ha sido
identificado por la señal como un posible infractor, es decir se ha tomado la foto,
se ha hecho el respectivo procesamiento de la imagen y se ha identificado la
placa, por último se envía el informe a un equipo remoto que en este caso emula
una central.
Se debe hacer la modificación del archivo cmdline.txt dónde se encuentra la
definición del puerto serie, esta modificación se hace desde el terminal de la
Raspberry Pi 3, la dirección del archivo es la siguiente:
sudo nano /boot/cmdline.txt
Se identifican los siguientes parámetros de configuración:
dwc_otg.lpm_enable=0 rpitestmode=1 console=ttyAMA0, 115200
kgdboc=ttyAMA0,115200 console=tty1 root=/dev/mmcblk0p2 rootfstype=ext4
rootwait
Se deben borrar los siguientes parámetros: rpitestmode=1 console=ttyAMA0,
115200 kgdboc=ttyAMA0,115200 para que así el puerto serie sea utilizado de
manera libre sin ningún problema.
Y los parámetros de configuración son:
dwc_otg.lpm_enable=0 rpitestmode=1 console=tty1 root=/dev/mmcblk0p2
rootfstype=ext4 rootwait
Se guardan las configuraciones y se realiza un sudo reboot (reinicio) para que los
cambios tengan efecto, y no se debe realizar ninguna actualización sudo apt-get
update, sudo apt-get upgrade, sudo rpi-update porque si se actualiza los
archivos con los parámetros originales tocaría volver a realizar el mismo proceso.
Existe una aplicación llamada Minicom la cual permite verificar el funcionamiento
del puerto serie, y se puede instalar desde el terminar de la siguiente manera
sudo apt-get install minicom con esta aplicación se llama el puerto serie sudo
minicom -b 19200 -o -D /dev/serial0 en dónde se pueden ver todos los
comandos que se envían entre el puerto serie y el módulo SIM 800 L.
Este módulo utiliza un slot de tamaño 3FF (micro sim). Con los operadores ETB y
TIGO es más fácil su conexión a la red móvil que otros operadores, se debe
realizar un registro de IMEI ante el operador móvil indicando que se va hacer uso
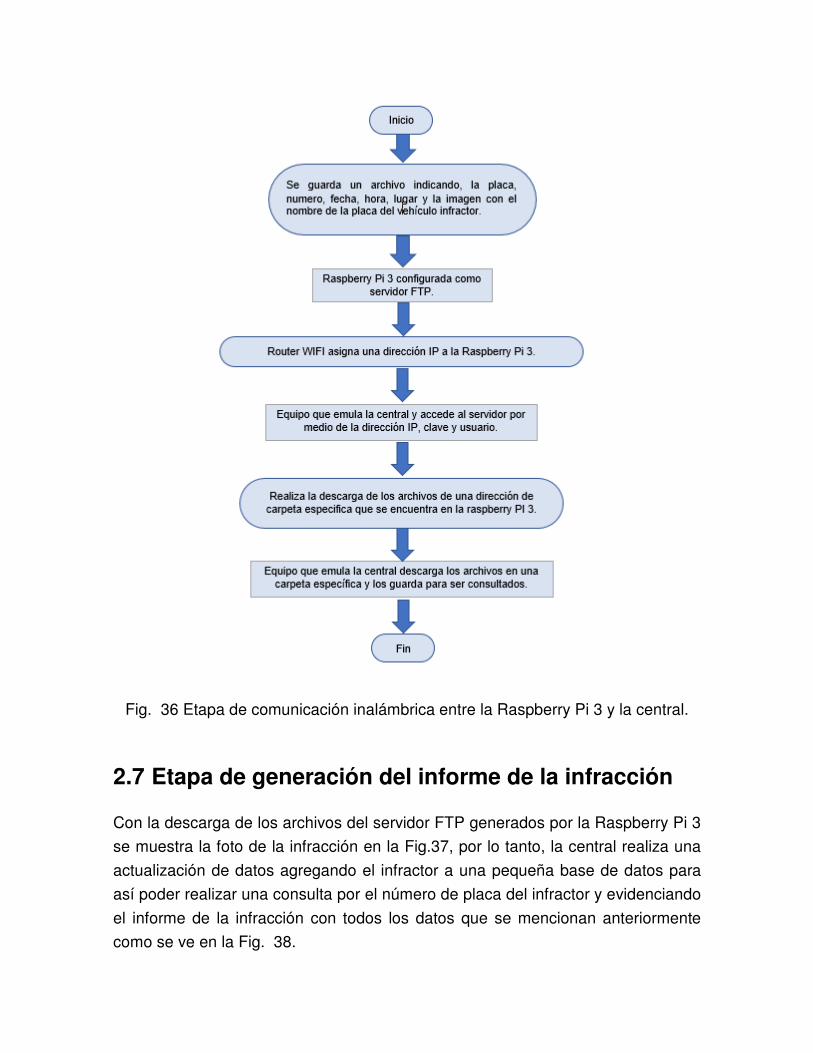
Fig. 36 Etapa de comunicación inalámbrica entre la Raspberry Pi 3 y la central.
2.7 Etapa de generación del informe de la infracción
Con la descarga de los archivos del servidor FTP generados por la Raspberry Pi 3
se muestra la foto de la infracción en la Fig.37, por lo tanto, la central realiza una
actualización de datos agregando el infractor a una pequeña base de datos para
así poder realizar una consulta por el número de placa del infractor y evidenciando
el informe de la infracción con todos los datos que se mencionan anteriormente
como se ve en la Fig. 38.
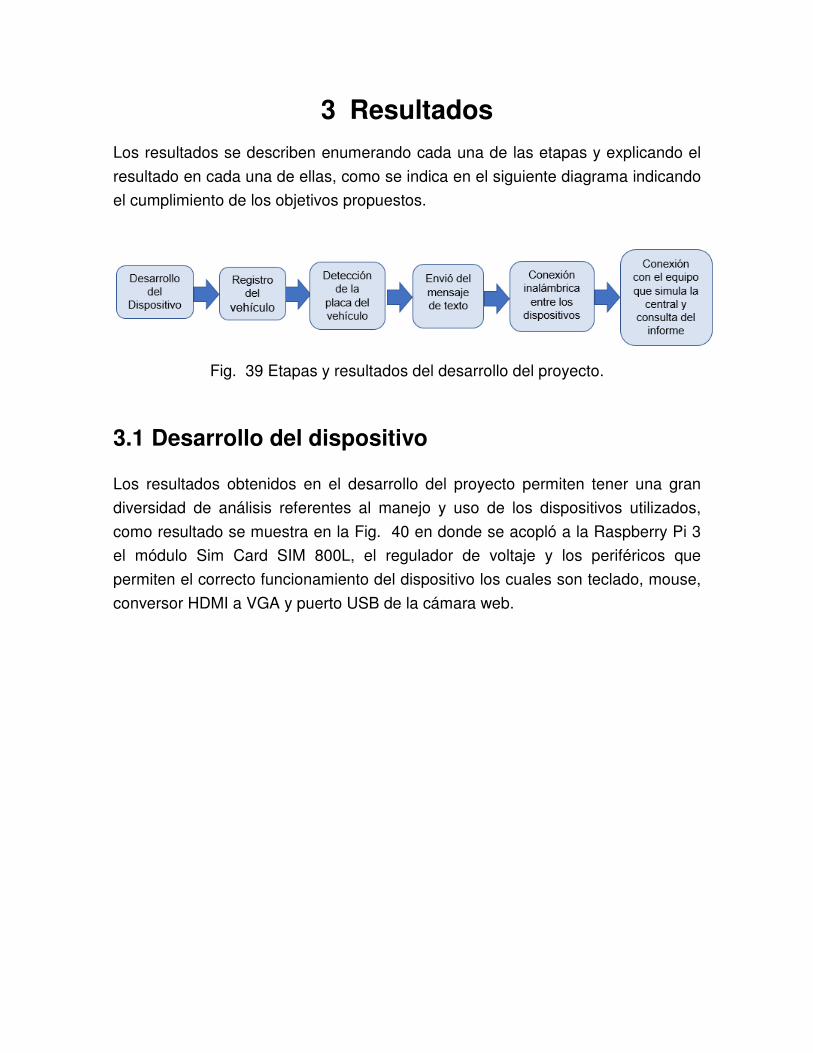
3 Resultados Los resultados se describen enumerando cada una de las etapas y explicando el
resultado en cada una de ellas, como se indica en el siguiente diagrama indicando
el cumplimiento de los objetivos propuestos.
Fig. 39 Etapas y resultados del desarrollo del proyecto.
3.1 Desarrollo del dispositivo
Los resultados obtenidos en el desarrollo del proyecto permiten tener una gran
diversidad de análisis referentes al manejo y uso de los dispositivos utilizados,
como resultado se muestra en la Fig. 40 en donde se acopló a la Raspberry Pi 3
el módulo Sim Card SIM 800L, el regulador de voltaje y los periféricos que
permiten el correcto funcionamiento del dispositivo los cuales son teclado, mouse,
conversor HDMI a VGA y puerto USB de la cámara web.
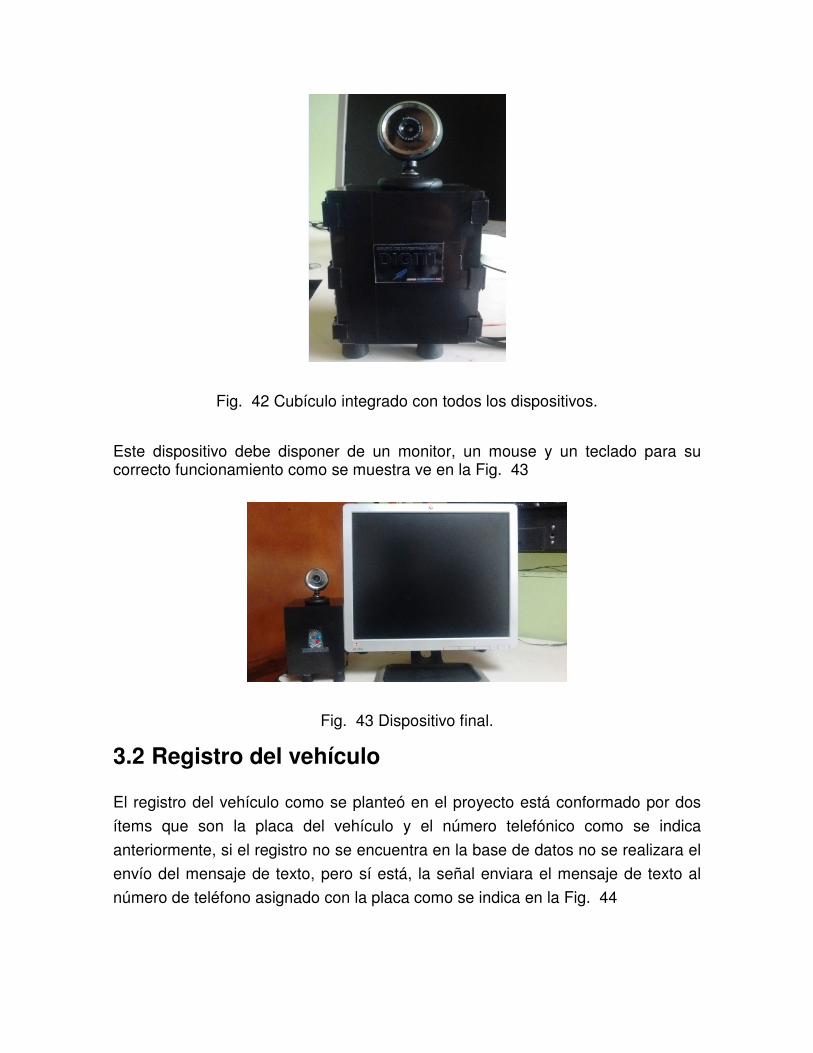
Fig. 42 Cubículo integrado con todos los dispositivos.
Este dispositivo debe disponer de un monitor, un mouse y un teclado para su correcto funcionamiento como se muestra ve en la Fig. 43
Fig. 43 Dispositivo final.
3.2 Registro del vehículo
El registro del vehículo como se planteó en el proyecto está conformado por dos
ítems que son la placa del vehículo y el número telefónico como se indica
anteriormente, si el registro no se encuentra en la base de datos no se realizara el
envío del mensaje de texto, pero sí está, la señal enviara el mensaje de texto al
número de teléfono asignado con la placa como se indica en la Fig. 44
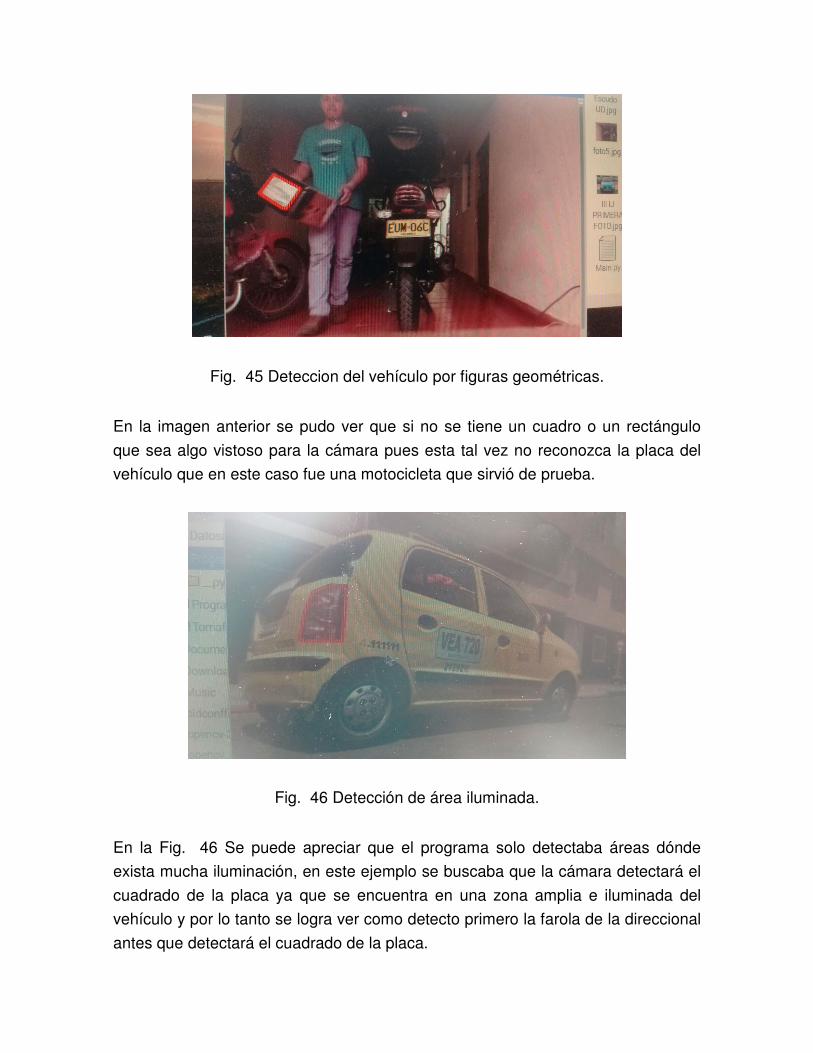
Fig. 45 Deteccion del vehículo por figuras geométricas.
En la imagen anterior se pudo ver que si no se tiene un cuadro o un rectángulo
que sea algo vistoso para la cámara pues esta tal vez no reconozca la placa del
vehículo que en este caso fue una motocicleta que sirvió de prueba.
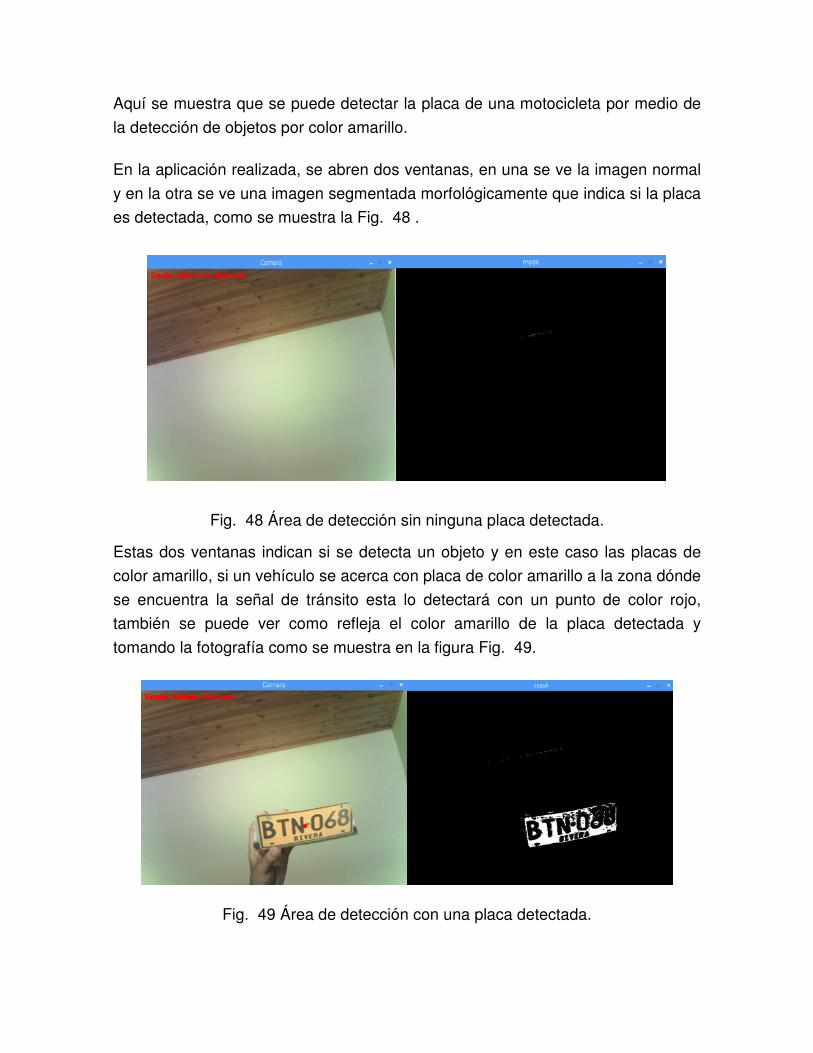
Fig. 46 Detección de área iluminada.
En la Fig. 46 Se puede apreciar que el programa solo detectaba áreas dónde
exista mucha iluminación, en este ejemplo se buscaba que la cámara detectará el
cuadrado de la placa ya que se encuentra en una zona amplia e iluminada del
vehículo y por lo tanto se logra ver como detecto primero la farola de la direccional
antes que detectará el cuadrado de la placa.
Aquí se muestra que se puede detectar la placa de una motocicleta por medio de
la detección de objetos por color amarillo.
En la aplicación realizada, se abren dos ventanas, en una se ve la imagen normal
y en la otra se ve una imagen segmentada morfológicamente que indica si la placa
es detectada, como se muestra la Fig. 48 .
Fig. 48 Área de detección sin ninguna placa detectada.
Estas dos ventanas indican si se detecta un objeto y en este caso las placas de
color amarillo, si un vehículo se acerca con placa de color amarillo a la zona dónde
se encuentra la señal de tránsito esta lo detectará con un punto de color rojo,
también se puede ver como refleja el color amarillo de la placa detectada y
tomando la fotografía como se muestra en la figura Fig. 49.
Fig. 49 Área de detección con una placa detectada.
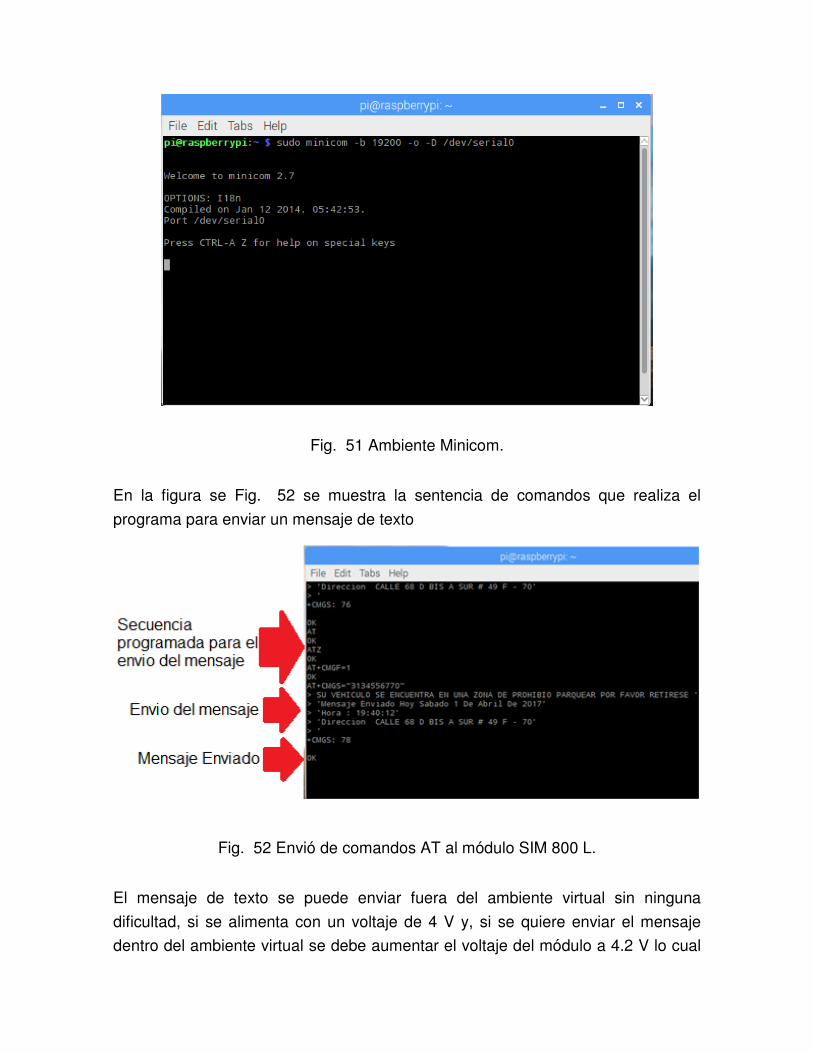
Fig. 51 Ambiente Minicom.
En la figura se Fig. 52 se muestra la sentencia de comandos que realiza el
programa para enviar un mensaje de texto
Fig. 52 Envió de comandos AT al módulo SIM 800 L.
El mensaje de texto se puede enviar fuera del ambiente virtual sin ninguna
dificultad, si se alimenta con un voltaje de 4 V y, si se quiere enviar el mensaje
dentro del ambiente virtual se debe aumentar el voltaje del módulo a 4.2 V lo cual
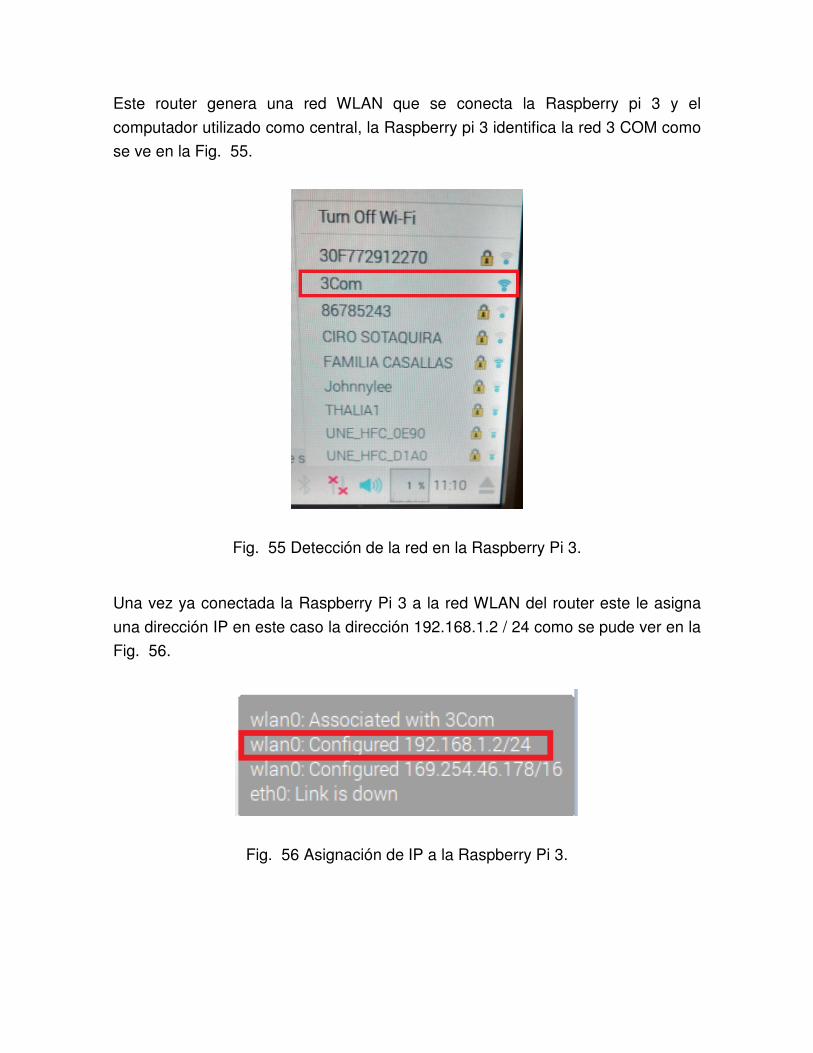
Este router genera una red WLAN que se conecta la Raspberry pi 3 y el
computador utilizado como central, la Raspberry pi 3 identifica la red 3 COM como
se ve en la Fig. 55.
Fig. 55 Detección de la red en la Raspberry Pi 3.
Una vez ya conectada la Raspberry Pi 3 a la red WLAN del router este le asigna
una dirección IP en este caso la dirección 192.168.1.2 / 24 como se pude ver en la
Fig. 56.
Fig. 56 Asignación de IP a la Raspberry Pi 3.
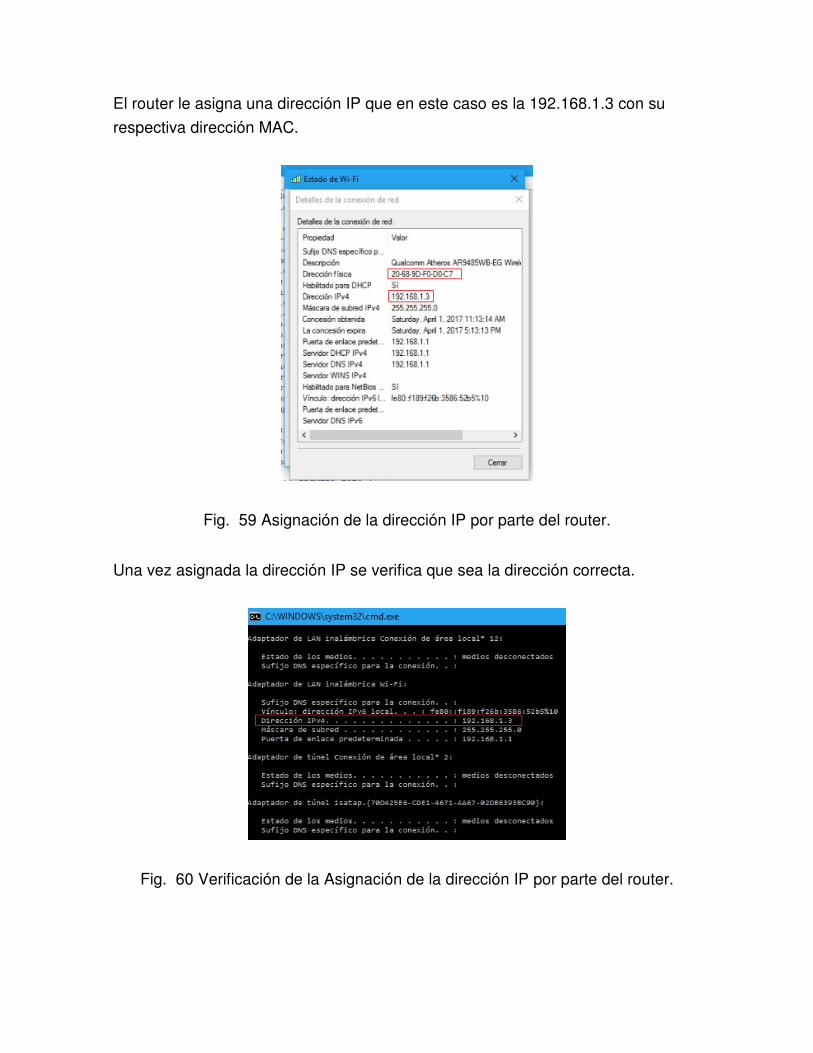
El router le asigna una dirección IP que en este caso es la 192.168.1.3 con su
respectiva dirección MAC.
Fig. 59 Asignación de la dirección IP por parte del router.
Una vez asignada la dirección IP se verifica que sea la dirección correcta.
Fig. 60 Verificación de la Asignación de la dirección IP por parte del router.
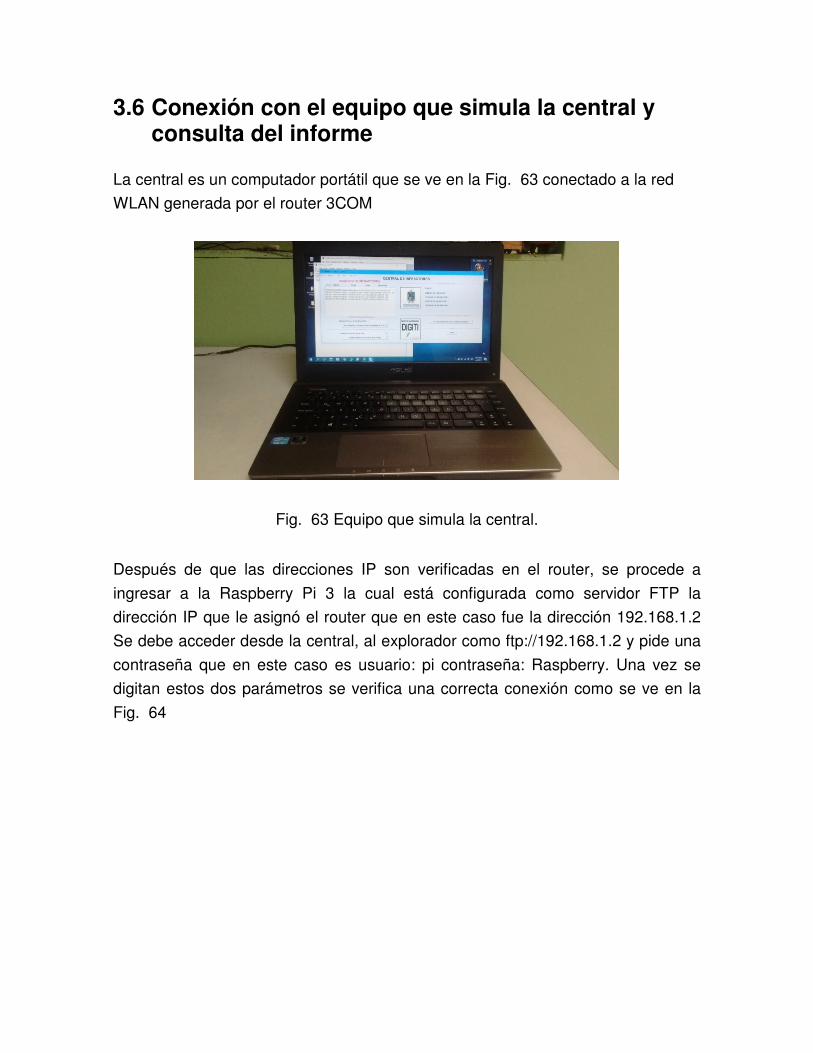
3.6 Conexión con el equipo que simula la central y consulta del informe
La central es un computador portátil que se ve en la Fig. 63 conectado a la red
WLAN generada por el router 3COM
Fig. 63 Equipo que simula la central.
Después de que las direcciones IP son verificadas en el router, se procede a
ingresar a la Raspberry Pi 3 la cual está configurada como servidor FTP la
dirección IP que le asignó el router que en este caso fue la dirección 192.168.1.2
Se debe acceder desde la central, al explorador como ftp://192.168.1.2 y pide una
contraseña que en este caso es usuario: pi contraseña: Raspberry. Una vez se
digitan estos dos parámetros se verifica una correcta conexión como se ve en la
Fig. 64
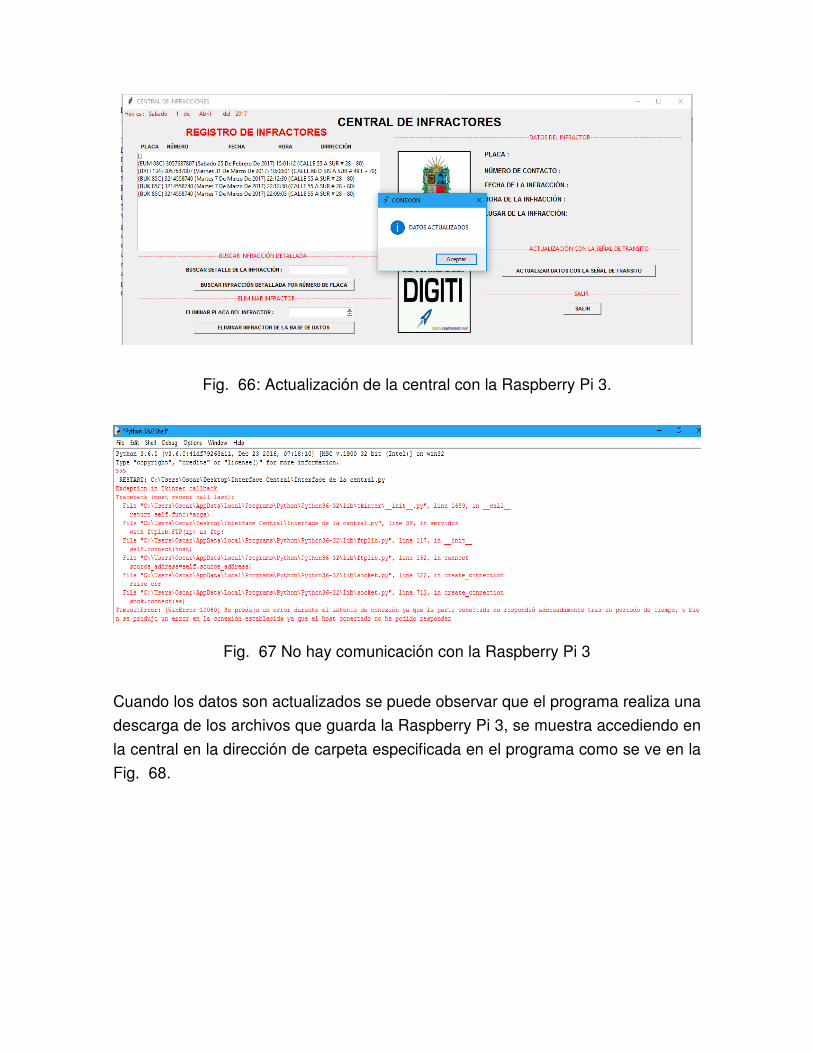
Fig. 66: Actualización de la central con la Raspberry Pi 3.
Fig. 67 No hay comunicación con la Raspberry Pi 3
Cuando los datos son actualizados se puede observar que el programa realiza una
descarga de los archivos que guarda la Raspberry Pi 3, se muestra accediendo en
la central en la dirección de carpeta especificada en el programa como se ve en la
Fig. 68.
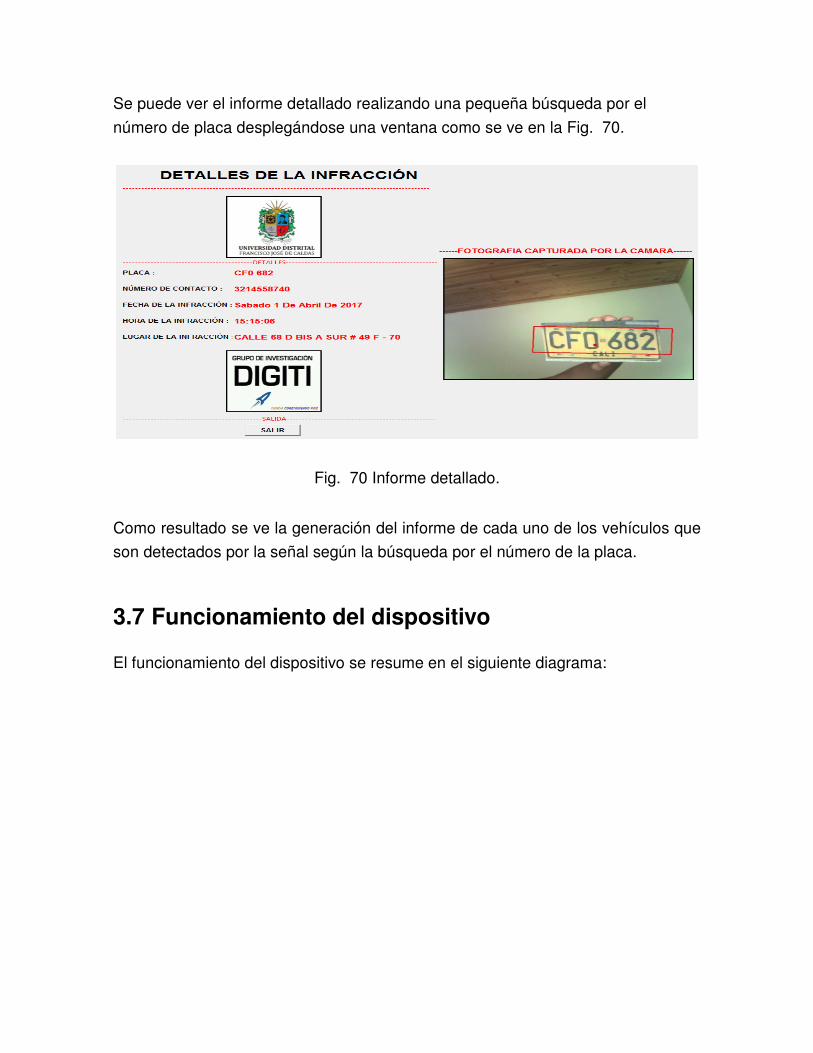
Se puede ver el informe detallado realizando una pequeña búsqueda por el
número de placa desplegándose una ventana como se ve en la Fig. 70.
Fig. 70 Informe detallado.
Como resultado se ve la generación del informe de cada uno de los vehículos que
son detectados por la señal según la búsqueda por el número de la placa.
3.7 Funcionamiento del dispositivo
El funcionamiento del dispositivo se resume en el siguiente diagrama:
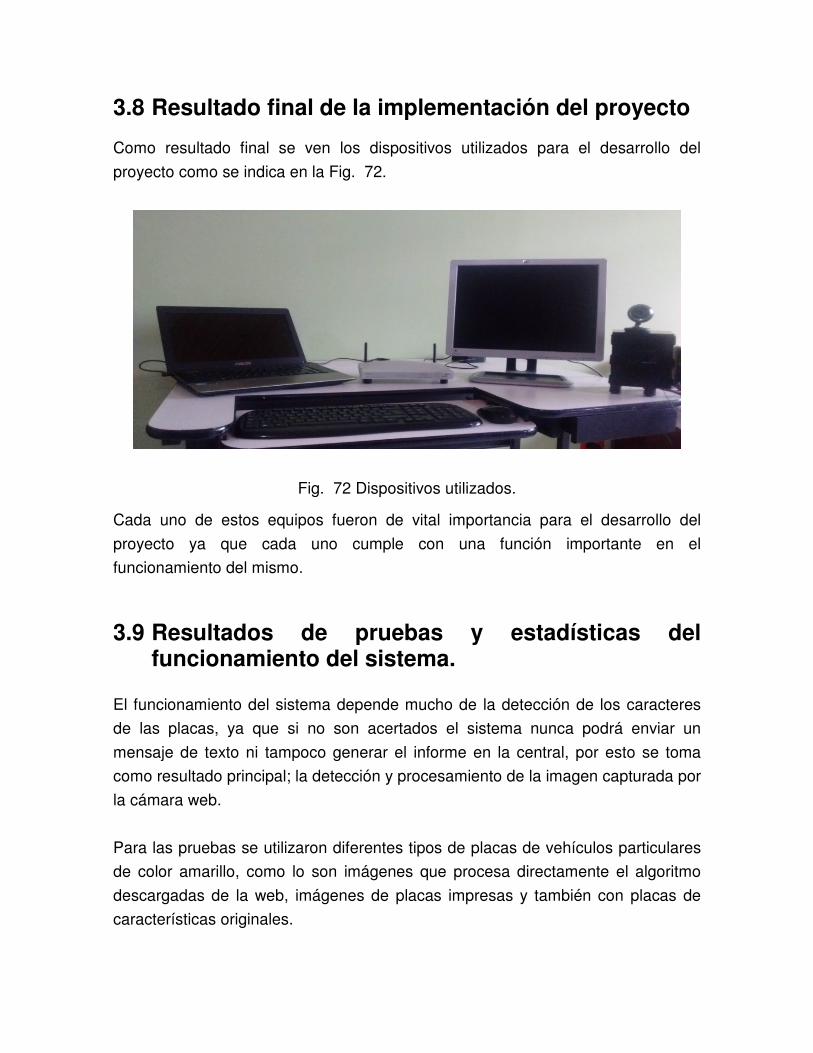
3.8 Resultado final de la implementación del proyecto Como resultado final se ven los dispositivos utilizados para el desarrollo del
proyecto como se indica en la Fig. 72.
Fig. 72 Dispositivos utilizados.
Cada uno de estos equipos fueron de vital importancia para el desarrollo del
proyecto ya que cada uno cumple con una función importante en el
funcionamiento del mismo.
3.9 Resultados de pruebas y estadísticas del funcionamiento del sistema.
El funcionamiento del sistema depende mucho de la detección de los caracteres
de las placas, ya que si no son acertados el sistema nunca podrá enviar un
mensaje de texto ni tampoco generar el informe en la central, por esto se toma
como resultado principal; la detección y procesamiento de la imagen capturada por
la cámara web.
Para las pruebas se utilizaron diferentes tipos de placas de vehículos particulares
de color amarillo, como lo son imágenes que procesa directamente el algoritmo
descargadas de la web, imágenes de placas impresas y también con placas de
características originales.
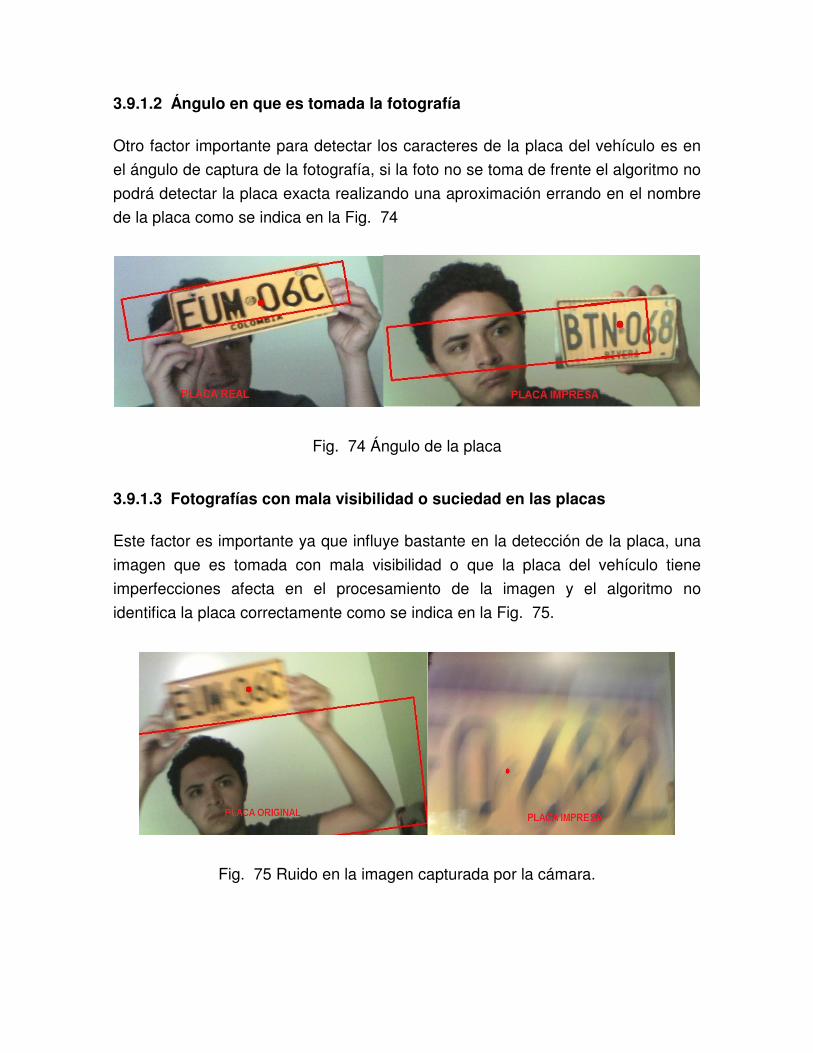
3.9.1.2 Ángulo en que es tomada la fotografía
Otro factor importante para detectar los caracteres de la placa del vehículo es en
el ángulo de captura de la fotografía, si la foto no se toma de frente el algoritmo no
podrá detectar la placa exacta realizando una aproximación errando en el nombre
de la placa como se indica en la Fig. 74
Fig. 74 Ángulo de la placa
3.9.1.3 Fotografías con mala visibilidad o suciedad en las placas
Este factor es importante ya que influye bastante en la detección de la placa, una
imagen que es tomada con mala visibilidad o que la placa del vehículo tiene
imperfecciones afecta en el procesamiento de la imagen y el algoritmo no
identifica la placa correctamente como se indica en la Fig. 75.
Fig. 75 Ruido en la imagen capturada por la cámara.
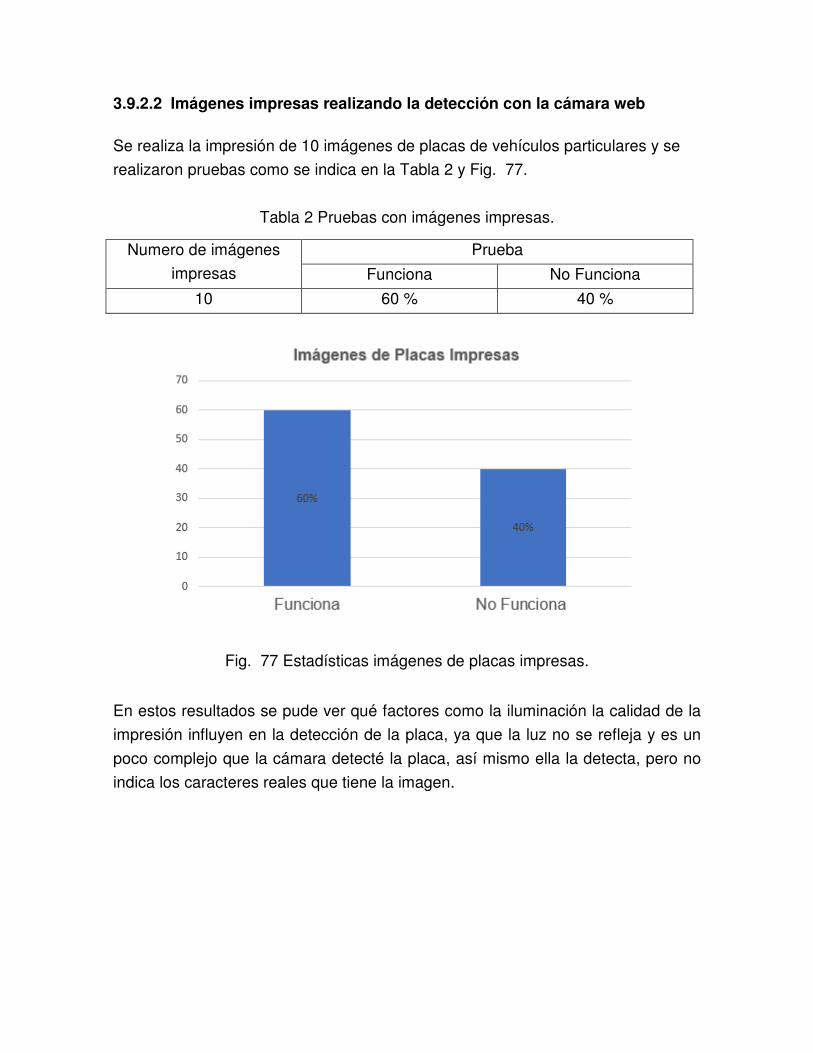
3.9.2.2 Imágenes impresas realizando la detección con la cámara web
Se realiza la impresión de 10 imágenes de placas de vehículos particulares y se
realizaron pruebas como se indica en la Tabla 2 y Fig. 77.
Tabla 2 Pruebas con imágenes impresas.
Numero de imágenes
impresas
Prueba
Funciona No Funciona
10 60 % 40 %
Fig. 77 Estadísticas imágenes de placas impresas.
En estos resultados se pude ver qué factores como la iluminación la calidad de la
impresión influyen en la detección de la placa, ya que la luz no se refleja y es un
poco complejo que la cámara detecté la placa, así mismo ella la detecta, pero no
indica los caracteres reales que tiene la imagen.
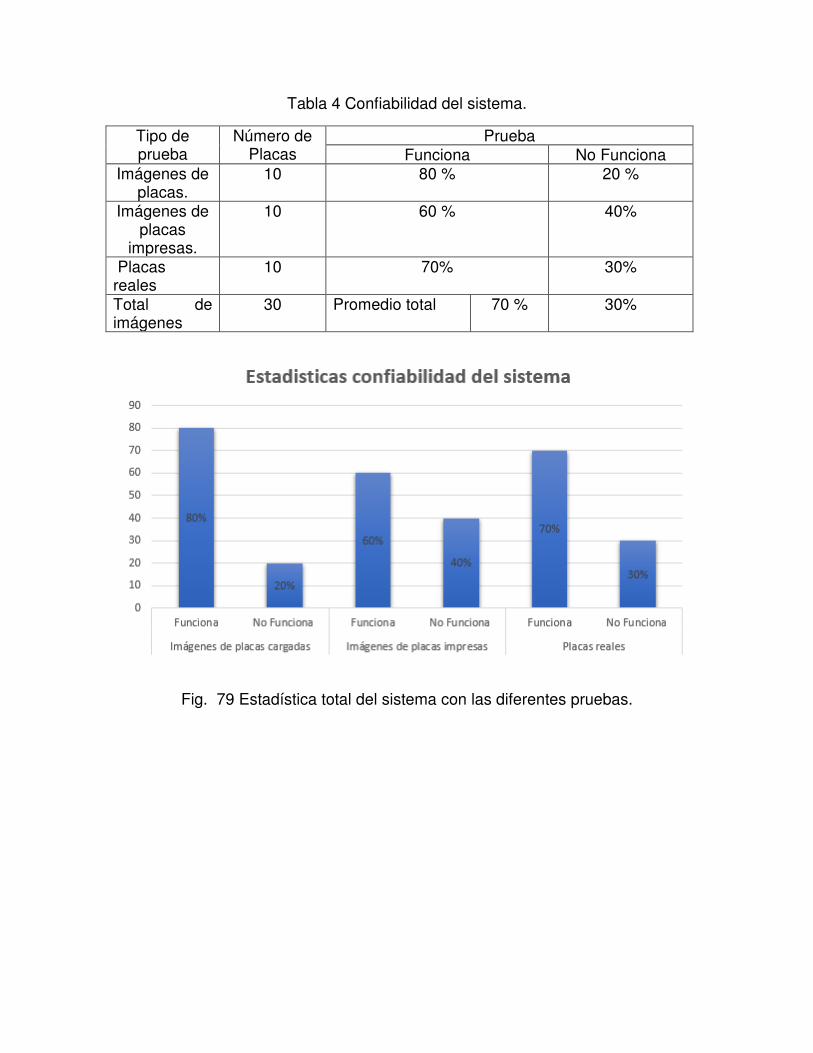
Tabla 4 Confiabilidad del sistema.
Tipo de prueba
Número de Placas
Prueba Funciona No Funciona
Imágenes de placas.
10 80 % 20 %
Imágenes de placas
impresas.
10 60 % 40%
Placas reales
10 70% 30%
Total de imágenes
30 Promedio total 70 % 30%
Fig. 79 Estadística total del sistema con las diferentes pruebas.
4 Conclusiones Este proyecto quedo inicialmente diseñado para la detección de vehículos
particulares o de placa amarilla, ya que en las respectivas pruebas se logró
detectar la placa del vehículo únicamente por medio de la detección de colores, y
en este caso por el color amarillo, utilizando métodos como la transformación a
escala de grises, binarización, segmentación, detección de bordes, el método
canny que permiten el procesamiento de la imagen y poder así detectar la placa
del vehículo. La detección de la placa depende de la intensidad de luz del medio,
ya sea con un día soleado u oscuro, en un día soleado o en un lugar dónde hay
bástate luminosidad es más fácil la detección de la placa ya que la luz mejora la
detección del color amarillo.
A través de la información recolectada se puede concluir que la picamera es un
módulo que puede satisfacer la necesidad de cualquier proyecto de visión artificial,
pero como es un módulo tan reciente de Raspberry, todavía no se ha explotado en
su totalidad y por el momento solo se pueden trabajar proyectos de mediana
escala, por los que para proyectos investigativos todavía carece de integración
con otras librerías para ello se utilizó como una alternativa de solución el uso de
una cámara web común ya que esta cuenta con bastante información acerca de
su uso y permitió hacer el reconocimiento de la placa por filtro de color en este
caso el color amarillo detectando por medio de visión artificial la placa del
vehículo. Los algoritmos diseñados y librerías utilizadas para la detección de
caracteres carecen de precisión en situaciones dónde la imagen obtenida esté con
baja resolución, como también un ángulo que impida la total visibilidad de la placa.
Así que se notó que hubo caracteres que la librería los malinterpreta como lo es el
caso de la letra “I”, aquí la librería lo interpreta como el número “1”. Otro ejemplo
es con la letra “D”, que es interpretada con la letra “O”. Estos son algunos de los
casos que impidieron al algoritmo ser 100% eficiente.
Cuando se envía el mensaje de texto puede que exista una latencia por unos
segundos o hasta minutos en que el mensaje llegue al número de destino, esto se
presenta por parte del proveedor de servicio en este caso la red del operador
móvil puede estar presentando algún inconveniente o congestión que impida que
el mensaje llegue en un tiempo menor.
Hacer la integración de la señal de tránsito con las bases de datos del ministerio
de transporte como lo es el SIM (Servicios Integrales Para La Movilidad) y el
RUNT (Registro Único Nacional De Tránsito), para que así se incluyan los datos
de cada uno de los vehículos y sus propietarios para poder informar de una
manera más detallada si se llegase a cometer una infracción.
Diseñar e implementar más de una señal de tránsito para así crear una red
convergente conformada por muchas señales que cubran el área de una ciudad
teniendo un mayor número de zonas de prohibido parquear monitoreadas y de
esta forma tener un seguimiento más detallado de los posibles infractores
generando estadísticas y análisis sobre la prevención de infracciones.
Agregar un temporizador con base al código nacional de tránsito dónde al
conductor se le permite una espera de 3 minutos en el sitio de prohibido parquear,
y a partir de ese momento el vehículo está cometiendo una infracción. Así que
inicialmente con el mensaje preventivo se le puede agregar una advertencia que
tenga el siguiente enunciado: “Señor conductor si no retira su vehículo en los
próximos 3 minutos puede recibir una infracción”. Con esto obligar al conductor a
que abandone el lugar inmediatamente, y si no lo hace se envía una segunda foto
a la central para que esta genere el respectivo informe de infracción.
4.2 Recomendaciones
Es necesario que para la detección de los caracteres de una placa se deba
ingresar distintos valores en la base de datos de la señal ya que el algoritmo de
detección indica demasiados valores cada vez que se analiza una imagen
haciendo más complejo la detección de un vehículo infractor.
Para asegurar que los datos de fecha y hora en la interfaz gráfica del reporte sean
los actuales, la Raspberry Pi 3 debe estar conectada a internet, para que actualice
la hora por medio de una conexión a internet.
El operador móvil requerido o de preferencia para que el módulo funcione
perfectamente en la zona dónde se realizó el proyecto es ETB o TIGO ya que hay
una mayor cobertura de red 2G en esta zona que otros operadores.

5 Referencias Bibliográficas
[1] C. Wang and H. Tsai. “Detecting Urban Traffic Congestion With Single Vehicle”.
In proc. 2013 IEEE International Conference on Connected Vehicles and Expo
(ICCVE). pp. 234-240.
[2] H. Wang, Q. Lu, L. Zang, L. Xu, and X. Li. “An approach for vehicle warning
base on video information in transportation surveillance”. In proc 2008 IEEE
International Conference on Computer and Electrical Engineering, pp. 553-557.
[3] A. Krishnakumar, N. Kumar, M. Gowtham and A. Perumal. “Intelligent Route
Selection in Road Ways”. In proc. 2012 IEEE International Conference on
Emerging Trends in Electrical Engineering and Energy Management
(ICETEEM), pp. 123-125.
[4] O. Khalifa, A. Assidiq and A. Hashim. “Vision-Based Lane Detection for
Autonomous Artificial Intelligent Vehicles”. In proc. 2009 IEEE International
Conference on Semantic Computing, pp. 636-640.
[5] N. Mithun, N. Rashid, and S. Rahman. “Detection and Classification of Vehicles
From Video Using Multiple Time-Spatial Images”. IEEE Transactions on
Intelligent Transportation Systems, Vol. 13, pp. 1215-1225.
[6] K. B. Saran and G. Sreelekha. “Traffic Video Surveillance: Vehicle Detection
and Classification”. In proc. 2015 IEEE International Conference on Control,
Communication & Computing India (ICCC), pp. 516-521.
[7] A. Broggi, P. Cerri, and P. Antonello. “Multi-Resolution Vehicle Detection Using
Artificial Vision”. In proc 2004 IEEE Intelligent Vehicles Symposium. Pp. 310-
314.
[8] M. Bertozzi, A. Broggi, M. Cellario, A. Fascioli, P. Lombardi, and M. Porta.
“Artificial Vision in Road Vehicles”. In proc. IEEE, 2002, pp. 1258-1270.
[9] Mundonets. (2012, Mayo). Señales de tránsito. [En línea]. Disponible en:
http://www.mundonets.com/senales-de-tránsito/.
[10] Mundonets. (2012, Mayo). Señales de tránsito reglamentarias. [En línea].
Disponible en: http://www.mundonets.com/senales-de-tránsito-reglamentarias/.
[11] Sectormovilidad. (2016, Abril). Aprendamos de movilidad. [En línea].
Disponible en: http://www.movilidadbogota.gov.co/?pag=355.
[12] Escuela de automovilismo Conducir Colombia. (2016, Abril). Señales
preventivas. [En línea]. Disponible en:
http://www.conducircolombia.com/preventivas.html.
[28] J. Acosta. B "Diseño e implementación de un sistema electrónico de
seguridad para retiro de alumnado de una jardín de infantes ",Página 9 ,
Universidad Tecnológica Israel.
[29] Minitronica. (2017, Marzo). "Enviando SMS con Arduino y SIM800L". [En
línea]. Disponible en: http://www.minitronica.com/blog/enviando-sms-arduino-
sim800l/.
[30] Foro, (2015, noviembre). "Módulo GSM/GPRS SIM800L". [En línea].
Disponible en: http://www.todopic.com.ar/foros/index.php?topic=45496.0.
[31] Comandos AT (2017 Mayo),"Comandos AT”, [En línea] Disponible en:
http://www.eveliux.com/mx/curso/comandos-at.html.
[32] Texas Instruments, (2017 Mayo),"LM2596 simple switcher power converter
150 KHZ ".
[33] MathWorks. (2017, Marzo). "Diseño y simulación de sistemas de visión
artificial en matlab". [En línea]. Disponible en:
https://es.mathworks.com/discovery/vision-artificial.html.
[34] Muñoz. P. "Procesamiento de imágenes". capítulo 6. Universidad de
Málaga. [En línea]. Disponible en:
http://www.lcc.uma.es/~munozp/documentos/procesamiento_de_imagenes/tem
as/pi_cap6.pdf.