-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
1/22
Outline of Course Project for Fuzzy
Logic Systems-EE5326
Obstacle Avoidance in the Navigation of HolonomicVehicles/Robots
using Fuzzy Rule Based Inference
SystemsProfessor-Dr. Tracy Liang
Student-Kunal Vora
Id-1000684121
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
2/22
Inspirations
Robot navigation in the Controlled
environment like in Manufacturing and
packaging uses Neuro-fuzzy systems. This
project is only a small part of its realization.
Failure of simulation of Robot path planning
using potential fields made in a course last
semester, under certain complex scenarios.
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
3/22
Classification of Approaches Used
Modeling based Approach
Sensor Based (Behavior Architecture)
Approach Hybrid approach
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
4/22
Model Based Approach
Modeling the environment to generated the path.Ex-Road Mapping,
Cell Decomposition, PotentialFields.
Some of these techniques can be used to find theshortest path
from starting to goal point.
Drawback-It depends heavily on the environmentmodel that is
developed to generate a safe path
.Since it is difficult to find accurate models thismethod is
used mostly in controlled environmentlike industries, manufacturing
and packaging.
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
5/22
Sensor Based Approach
Feedback from sensor. Control command generatedbased on Sensor
data. Ex-Goal attraction, wallfollowing, Obstacle
avoidance.(Reactive system).
Each type of sensor feedback generates a typicalbehavior in the
robot/vehicle that it followsunder each specific conditions.
Due to reactive bahavior of this systems, they cannavigate
efficiently in dynamic environment.
Drawback-Robot/vehicle may not reach the desiredtarget , even if
a safe path exists between startingand ending points
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
6/22
Hybrid Approach
A compromise between the optimality of
model based approach and adaptability of
Sensor based approach.
It starts with the model based approach to
generate a optimal path, and then uses a
sensor feedback based controller, that helps it
to navigate ,avoiding the obstacles, which are
unknown in the model created.
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
7/22
About the present project
It assumes that the vehicle/robot is Holonomic. Itcan move in
all directions without anyconstraints.
All obstacles are static. Goal is static. Vehicle/robot gets
feedback from sensors that
measures distance of its present location to allobstacles and
goal and their angular positions.
It uses Fuzzy Rule based system to makedecisions about the
directions to be moved in,once it realizes that the obstacle is in
its vicinity.
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
8/22
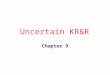
About the present project-Conti
0 2 4 6 8 10 12 0
2
4
6
8
10
12
Target
O B S 1
O B S 2 O B S 3
O B S 4
R O B O T Angle measurement
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
9/22
Some Description-
About the execution
The robot/vehicle starts from its origin position with aconstant
speed, towards the Target .
At each step it calculates the Euclidian distancebetween itself
and each of the obstacles and between
itself and the Target point. It also measures the angle (w.r.t
X-axis) between the
line from present position to goal and the lines fromthe present
position to each of the obstacles.
This data can be considered as the feedback from thesensors
either proximity sensors or the positionsensors.
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
10/22
Some Description about the
Execution(Conti)
When the distance between closest obstacle and itselfcrosses a
certain threshold, it activates an inferencesystem which is based
on Fuzzy Rules about- what thebehavior of vehicle/robot should be?
when it
encounters such a condition. The FIS uses the data of the
Angular measurements
taken during the motion and the present position.
The output of the FIS is used to decide -Robot/Vehicleis
supposed to in which direction? to avoid collisionand reach the
target point safely.
This FIS is activated every time the Vehicle/robotencounters an
obstacle.
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
11/22
Input Membership Functions of FIS
(The values are never fixed)
Angle between present position to target line and X-
axis
Obs in wayObs just
on leftObs just
on right
Obs on leftObs on right
Obs on
side Obs on
side
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
12/22
Outline of Inference and Rules
Complete If-Then Rules are used.
Since the robot encounters one obstacle onlyat a time , we can
consider that mostly thissystem will be singleton type. But
attemptswill be made to make it more comprehensivenon-singleton
system.
The input parameter to the Input functions isthe angle towards
the obstacle relative to theangle towards the Target point.
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
13/22
Rules Format
If the obstacle is in way, disallow front movement. Disallow
front movement, means that go either left
or right. This is realized in coding by moving on eitherof any
axis and not along both the axes.
Ifthe obstacle is on just left , then move rightfast. Move right
fast is realized in coding by moving morenumber of steps along the
right axis
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
14/22
Inference And Defuzzification
If more than one input MF are fired then Max-out of two will be
used.
In deriving the inference, if more than one
rules are encountered(fired) then the type ofComposition used
will depend on , which onegives the better output and decision.
For getting the correct output theconventional Defuzzification
methods havefailed .[1].
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
15/22
De-fuzzification
Height De-fuzzification will be Implemented
It has been proven better in this kind ofapplication which needs
more accuracy then
smoothness.
Ex-If Output Command is of the form given onnext page , and if
we use, and if we used
centroid de-fuzzification, then the robot willmove in wrong
direction leading to failure ofAlgorithm.
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
16/22
Defuzzification
Centroid
Defuzz
Height or
Centre of
Largest area
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
17/22
After Inference
After the FIS gives its inference the Robotexecutes it and goes
in the direction which isaway from the obstacle Thus realizing
Obstacle avoidance behavior (attributed bythe sensor
feedback).
Once the Robot/Vehicle is away from theobstacle by certain
threshold distance ,itswitches back to the Goal attraction
behaviorleaving the FIS alone.
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
18/22
Advanced Technique-Command Fusion
This technique of Command fusion has now beenused by a number of
researcher in thepublications.
Same will be realized, but using De-fuzzificationprocess.
As mentioned earlier-
If the obstacle is in way ,disallow front movement.This rule
will generate a Fuzzy conclusion based on FIS about the
Disallowed Direction.
Disallowed Direction is Front , so not disallowed direction is
either leftor right
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
19/22
Conti
At the same time the goal attraction behavior
will generate an another conclusion we call it
the desired direction.
We shall fuse these two Conclusion and
defuzzify using a Conjunction operator.
Turning Direction(x)= (Desired) AND (Not Disallowed)(x)
=( Desired (x) ) (1-Disallowed(x))
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
20/22
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
21/22
Suggestions and Comments.Thank You.
-
8/6/2019 Outline of Course Project for Fuzzy Logic
Systems-EE5326
22/22
References-
Uncertainty Rule based Fuzzy logic Systems-J
M Mendel.
Fuzzy logic based extension to Payton andRosenblatts Command
fusion Method for
Mobile Robot Navigation -J Yen and N
Pflugger.
A number of other IEEE Publications.