Embed Size (px)
Citation preview
BackgroundBackground
Overview of
Projective Geometry
Topics Covered
Background (Projective Geometry)
Single View
Double View
Triple View
N-view
Robust parameter estimation

‘Projective’ Geometry
Study relations between different classes of coordinate transformations
Maintain Co-linearity (iff XXXX’’’’=HXHXHXHX)
Not necessarily maintain
Angle and length (Euclidean)
Angle and relative length (similarity)
Parallelism, line and plane at infinity (affine)
Intersection and tangency (projective)

Class Diagram
Note that perspective camera projection is notnotnotnot in the hierarchy
Projective geometry does not, theoretically, have to involve cameras (e.g. Euclidean)
But many concepts are very useful in camera calibration and image analysis
SimilarityEuclidean Affine Projective

Invariants
100
2221
1211
y
x
taa
taa
100
2221
1211
y
x
tsrsr
tsrsr
333231
232221
131211
hhh
hhh
hhh
100
2221
1211
y
x
trr
trr
Projective
8dof
Affine
6dof
Similarity
4dof
Euclidean
3dof
Concurrency, collinearity, order of contact (intersection, tangency, inflection, etc.), cross ratio
Parallelism, ratio of areas, ratio of lengths on parallel lines (e.g midpoints), linear combinations of vectors (centroids). The line at infinity lThe line at infinity lThe line at infinity lThe line at infinity l
∞
Ratios of lengths, angles.The circular points I,JThe circular points I,JThe circular points I,JThe circular points I,J
lengths, areas.

Transformation Hierarchy
Rectification
What information (constraint) needed to be supplied to go up in the hierarchy
Additional information limits the degrees of freedom
Rectification is a mathematic process of limiting DOFs of H H H H (camera or not)
63Euclidean
74Similarity
126Affine
158Projective
3D2D

Decomposition of projective transformations
=
==
vv
sPAS TTTT v
tA
v
IKtRHHHH
0
10
0
10
TtvRKA += s
K 1det =Kupper-triangular,
decomposition unique (if chosen s>0)
=
0.10.20.1
0.2242.8707.2
0.1586.0707.1
H
−
=
121
010
001
100
020
015.0
100
0.245cos245sin2
0.145sin245cos2oo
oo
H
Example:
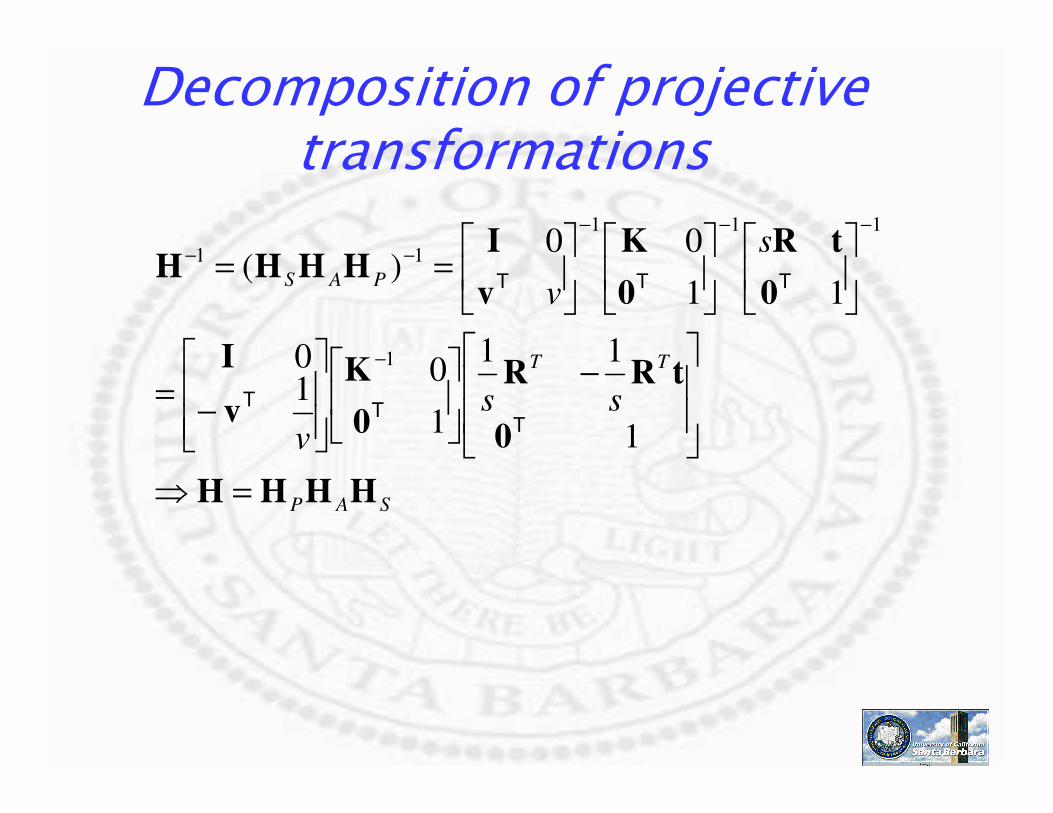
Decomposition of projective transformations
SAP
TT
PAS
ssv
s
v
HHHH
0
tRR
0
K
v
I
0
tR
0
K
v
IHHHH
=⇒
−
−=
==
−
−−−
−−
1
11
1
010
11
00)(
1
111
11
TT
T
TTT
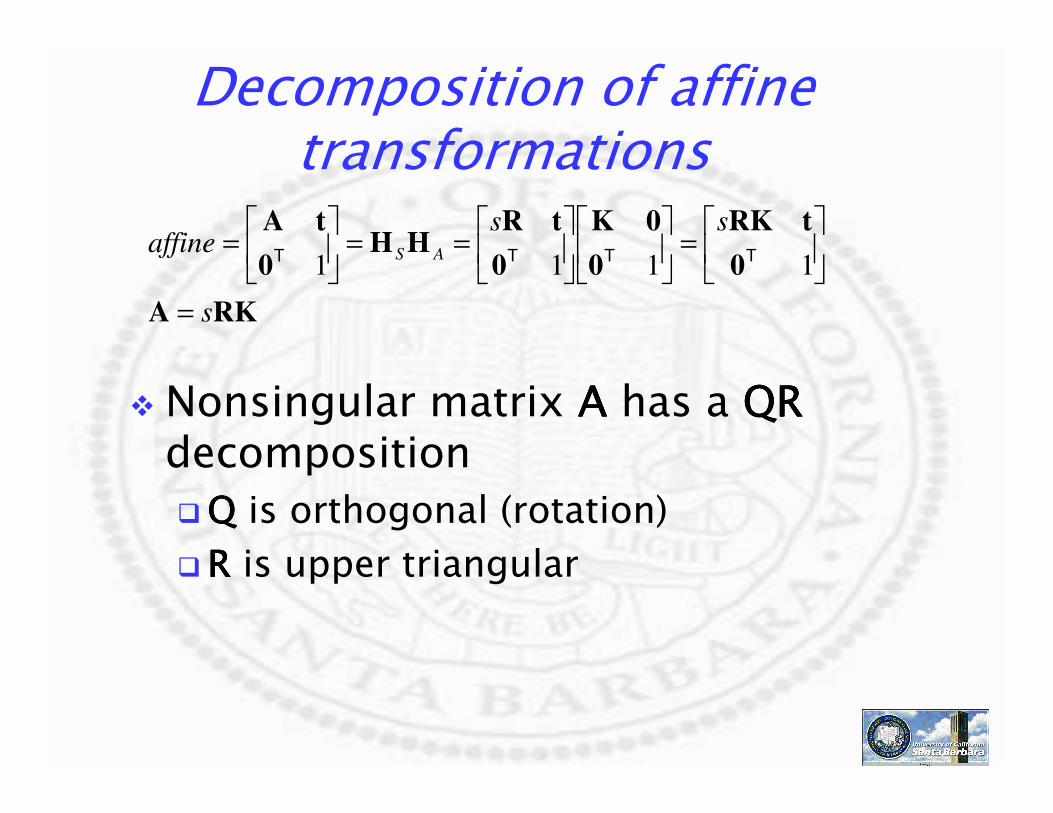
Decomposition of affine transformations
RKA
0
tRK
0
0K
0
tRHH
0
tA
s
ssaffine AS
=
=
==
=
1111 TTTT
Nonsingular matrix AAAA has a QRQRQRQRdecomposition
QQQQ is orthogonal (rotation)
RRRR is upper triangular
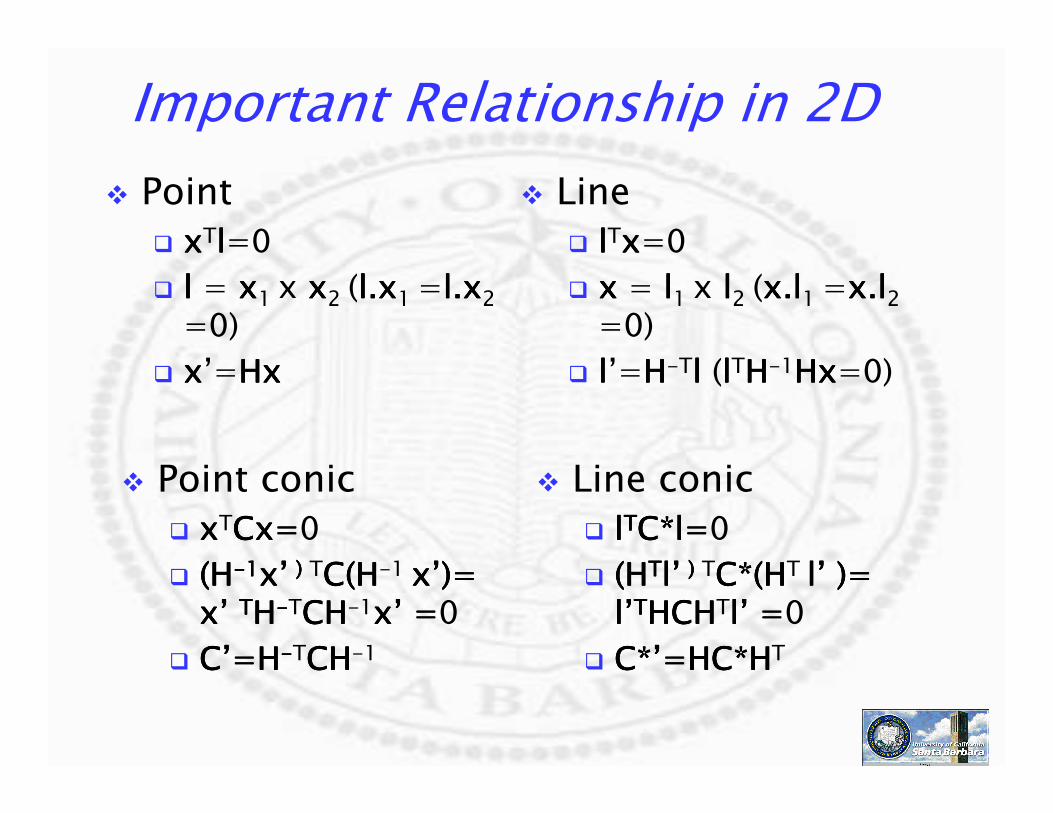
Important Relationship in 2D
Point
xxxxTllll=0
llll = xxxx1 x xxxx2 (l.l.l.l.xxxx1 =l.l.l.l.xxxx2 =0)
xxxx’=HxHxHxHx
Line
llllTxxxx=0
xxxx = llll1 x llll2 (x.x.x.x.llll1 =x.x.x.x.llll2 =0)
llll’=HHHH-Tllll (llllTHHHH-1HxHxHxHx=0)
Point conic
xxxxTCxCxCxCx====0
(H(H(H(H----1111xxxx’’’’ ) ) ) ) TC(HC(HC(HC(H-1 xxxx’’’’)= )= )= )= xxxx’’’’ TTTTHHHH----TCHCHCHCH-1xxxx’’’’ ====0
CCCC’’’’=H=H=H=H----TCHCHCHCH-1
Line conic
llllTTTTCCCC*l=*l=*l=*l=0
((((HHHHTTTTllll’’’’ ) ) ) ) TC*(HC*(HC*(HC*(HT llll’’’’ )= )= )= )= llll’’’’TTTTHCHHCHHCHHCHTllll’’’’ ====0
C*C*C*C*’’’’=HC*H=HC*H=HC*H=HC*HT

Important Relationship in 2D (cont.)
Point at infinity
(rx,ry,1) r-> infinity
(x,y,0)
(x,y,0).(0,0,1) = 0
Line at infinity
(a b).(x y) = r, r-> infinity
(0,0,1)
(0,0,1).(x,y,0) =0
Degenerate point conic
C=lmlmlmlmT+mlmlmlmlT, llllllllT
Rank two, rank one
Null space xxxx = l x ml x ml x ml x m
Degenerate line conic
C* = xyxyxyxyT + yxyxyxyxT,xxxxxxxxT
Rank two, rank one
Null space llll = x x yx x yx x yx x y
Absolute dual conic is degenerate line conics

Dual Relationship of Pole and Polar in
2D for Point and Line Conic
Point conic xxxxTTTTCxCxCxCx=0
Tangent CCCCTTTTxxxx
Pole not on the conic xxxx
Polar line CxCxCxCx
Point on polar line yyyyTTTTCxCxCxCx=0=0=0=0
Point also on conic
Pole on tangent line (CCCCTTTTy)y)y)y)TTTTxxxx=0=0=0=0
Line conic llllTTTTCCCC*l*l*l*l=0
Tangent point C*C*C*C*TTTTllll
Polar not tangent to conic llll
Pole C*lC*lC*lC*l
Line passing through pole mmmmTTTTCCCC*l=0*l=0*l=0*l=0
Line tangent to conic
Polar passing through contact (C*C*C*C*TTTTm)m)m)m)TTTTllll=0=0=0=0
x
Cx
y
C*l
l
C*Tm
m
Measuring Line Direction
Point conic
At line of infinity
Line of infinity encodes direction
Line conic
In plane
Pole-polar relation is projective invariant

Dual Relationship in 2D
Circular points
On line of infinity
Dual conic
Degenerate line conic
mmmmTTTTCCCC*l=0, C*=IJ*l=0, C*=IJ*l=0, C*=IJ*l=0, C*=IJT+JI+JI+JI+JIT
Measure lineorientation

Important Relationship in 3D
Point
PPPPTXXXX=0
XXXX’’’’=HX=HX=HX=HX
Plane
XXXXTPPPP=0
PPPP’’’’ = H= H= H= H----TTTTPPPP
Point quadric
XXXXTQX=QX=QX=QX=0
(H(H(H(H----1111XXXX’’’’ ))))TQ(HQ(HQ(HQ(H----1 1 1 1 XXXX’’’’)= )= )= )= XXXX’’’’ TTTTHHHH----TQHQHQHQH----1111XXXX’’’’ ====0
QQQQ’’’’=H=H=H=H----TQHQHQHQH----1111
Plane quadric
PPPPTQ*P=Q*P=Q*P=Q*P=0
(H(H(H(HTTTTPPPP’’’’ ) ) ) ) TQ*(HQ*(HQ*(HQ*(HTPPPP’’’’ )= )= )= )= PPPP’’’’TTTTHQ*HHQ*HHQ*HHQ*HTPPPP’’’’ ====0
Q*Q*Q*Q*’’’’=HQ*H=HQ*H=HQ*H=HQ*HT

Dual Relationship of Pole and Polar in 3D for Point and Plane Quadric
Point quadric XXXXTTTTQXQXQXQX=0
Tangent plane QQQQTTTTXXXX
Pole not on the quadric XXXX
Polar plane QXQXQXQX
Point on polar plane YYYYTTTTQX=0QX=0QX=0QX=0
Point also on quadric
Pole on tangent plane (QQQQTTTTY)Y)Y)Y)TTTTX=0X=0X=0X=0
Plane quadric PPPPTTTTQ*PQ*PQ*PQ*P=0
Tangent point Q*Q*Q*Q*TTTTPPPP
Polar plane not tangent to quadric PPPP
Pole Q*PQ*PQ*PQ*P
Plane passing through pole SSSSTTTTQ*P=0Q*P=0Q*P=0Q*P=0
Plane tangent to quadric
Polar passing through contact (Q*Q*Q*Q*TTTTS)S)S)S)TTTTP=0P=0P=0P=0

Measuring Direction in 3D
Line Direction
Point conic in plane of infinity
Line conic in space
Plane direction
Plane quadric in space
A Hard to Visualize (but extremely important!) Concept
A plane contains a line at infinity (0,0,1)
Line at infinity contains two circular points (or a degenerate conic)
3D space contains a plane at infinity (0,0,0,1)
Plane at infinity contains an absolute conic
Line at infinity lies on plane at infinity
Two circular points lie on the absolute conic
0,0 3
2
2
2
1 ==+ xxx 0,0 4
2
3
2
2
2
1 ==++ xxxx

Proof
Line at infinity lies on plane at infinity
(or point at infinity lies on plane at infinity)
Circular points lie on absolute conic
+
=
0
|
|
0
|
|
0
0
1000
|||
|||
21
3
2321
1
rrrrryx
y
x
t
t
t
0
0||2||
)()(
0
|
|
0
|
|
0
0
1
1000
|||
|||
4
2
221
2
1
2121
2
3
2
2
2
1
21
3
2321
1
=
=−⋅+=
+⋅+=++
+
=
x
i
iixxx
ii
t
t
t
rrrr
rrrr
rrrrr

A Hard to Visualize Concept
3D plane
Line at infinity
All circles intersect AC in two points (circular points)
All spheres intersect plane at infinity in AC
Comparing 2D and 3Dfor Line
Dual conic
Line conic
In line of infinity
Pole-and-polar relation
Line orientation
Absolute conic
Point conic
In plane of infinity
Pole-and-polar relation
Line orientation
0,
1
1
1
0
=
=
=
∞
∞
w
T
C
lCl
Plane of infinity encodes line direction

Dual Relationship in 3D
Absolute conic (AC)
On line of infinity
Backproject into ADQ
Measure lineorientation
Absolute dual quadric (ADQ)
In space
Project into ADC
Measure planeorientation
=
=
∞
∞
0
1
1
1
0
*
*
C
PCPT
0,
1
1
1
0
=
=
=
∞
∞
w
T
C
lCl

Comparing 2D and 3D
2 points
In line of inf
Line conic
Line orientation
Point conic
In plane of infinity
Line orientation
Image of absolute conic in image
Dual quadric
In space
Plane orientation
Image of absolute dual conic in image

Rectification
2D
HHHH fixes line of infinity if and only if HHHH is affine
HHHH fixes circular points if and only if HHHH is similarity
3D
HHHH fixes plan of infinity if and only if HHHH is affine
HHHH fixes AC and DAQ if and only if HHHH is similarity

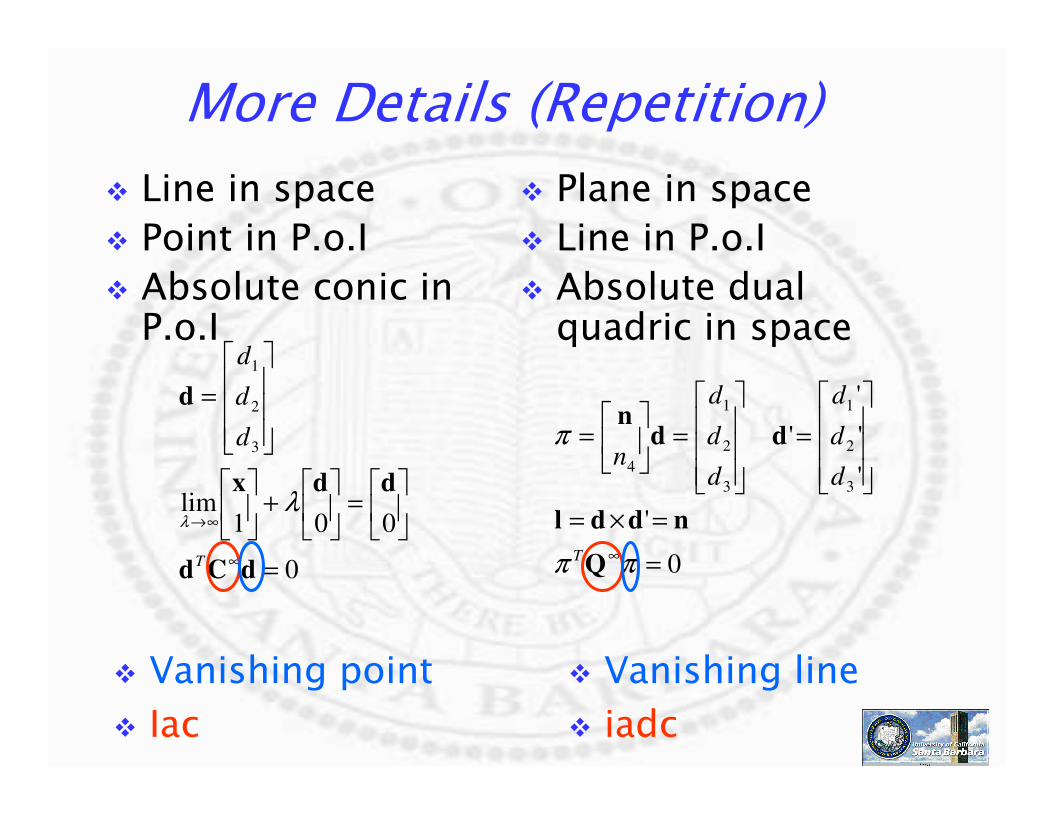
More Details (Repetition)
Line in space
Point in P.o.I
Absolute conic in P.o.I
Plane in space
Line in P.o.I
Absolute dual quadric in space
0
001lim
3
2
1
=
=
+
=
∞
∞→
dCd
ddx
d
T
d
d
d
λλ
0
'
'
'
'
'
3
2
1
3
2
1
4
=
=×=
=
=
=
∞ππ
π
Q
nddl
ddn
T
d
d
d
d
d
d
n
Vanishing point
Iac
Vanishing line
iadc

Why We Even Care? (2D version)
Because in 2D pole and polar relationship is projective invariant For point conic yyyyTTTTCxCxCxCx=0=0=0=0 For line conic mmmmTTTTCCCC*l=0*l=0*l=0*l=0
mmmm’’’’TTTTCCCC****’’’’llll’’’’=(H=(H=(H=(H----TTTTm)m)m)m)TTTTHCHCHCHC*H*H*H*HTTTT (H(H(H(H----TTTTllll)=)=)=)=mmmmTTTTCCCC*l*l*l*l
This means that known (orthogonal) directions in space Measured them in images (no longer orthogonal, but still satisfy pole-polar relationship)
Constraint on HHHH In regular Cartesian frame
C* C* C* C* is the absolute dual conic
In projective frame C*C*C*C*’’’’ is the image of absolute dual conic (iadc)

Angles In 2D Case
I, JI, JI, JI, J are circular points
Absolute dual conic is a degenerate conic (null space is line at infinity)
TT
T
TT
T
TT
T
C
ii
xxx
C
CC
C
dddddddd
dddd
JIIJ
JI
xx
dddd
dd
dddd
dd
+=
−==
==+
=
=
=
++
+=
∞
∞
∞∞
∞
*
3
2
2
2
1
*
2
*
21
*
1
2
*
1
2211
21
2222212112121111
22122111
)0,,1(),0,,1(
0,0
0
0
1
1
0
1
1
0
1
1
cosθ

Angles in 3D Case -Line
Absolute (point) conic is a conic on the plane at infinity
0,0
0
1
1
1
1
1
1
1
1
1
cos
4
2
3
2
2
2
1
2222
21
2211
21
232322222121131312121111
231322122111
==++⇒
=Ω⇒
ΩΩ
Ω=
=
++++
++=
∞
∞∞
∞
xxxx
dddddddddddd
dddddd
T
TT
T
TT
T
ll
llll
ll
llll
ll
θ

Angles in 3D Case -Plane
Absolute dual quadric is a degenerate quadric (null space is plane at infinity)
0,0
0
0
1
1
1
0
1
1
1
0
1
1
1
cos
4
2
3
2
2
2
1
*
2
*
22
*
2
2
*
1
2211
21
232322222121131312121111
231322122111
==++⇒
=⇒
=
=
++++
++=
∞
∞∞
∞
xxxx
Q
Q
dddddddddddd
dddddd
T
TT
T
TT
T
ππ
ππππ
ππ
ππππ
ππ
θ
Why We Even Care? (3D version)
Because in 3D pole and polar relationship is again projective invariant For absolute conic lTTTT ΩΩΩΩ m=0 m=0 m=0 m=0 (for line)
For absolute dual quadric SSSSTTTTQ*P=0 Q*P=0 Q*P=0 Q*P=0 (for plane)
SSSS’’’’TTTTQQQQ’’’’*P*P*P*P’’’’=(=(=(=(HHHH----TTTTSSSS))))TTTTHQ*HHQ*HHQ*HHQ*HTTTT (H(H(H(H----TTTTP)P)P)P)= = = = SSSSTTTTQ*PQ*PQ*PQ*P
This means that known (orthogonal) directions in space
Measured them in image of a3D scene
Constraint on HHHH
In regular Cartesian frame
ΩΩΩΩ , Q* , Q* , Q* , Q* is the absolute conic and absolute dual quadric
In projective frame
ω, ω∗ ω, ω∗ ω, ω∗ ω, ω∗ are iac and iadc

Rectification
Rectification is a mathematic process of limiting DOFs of H H H H (camera or not)
If HHHH is to be decomposed further into camera matrix may not be considered (inner working of HHHH not recovered)
Cameras can be treated as a projective device
Affine camera
Induce affine transform
Perspective (pinhole) camera
Induce projective transform

Rectification Under Homography
Same camera center Different camera centers, but planar structure

Removing projective distortion #1
333231
131211
3
1
'
''
hyhxh
hyhxh
x
xx
++
++==
333231
232221
3
2
'
''
hyhxh
hyhxh
x
xy
++
++==
( ) 131211333231' hyhxhhyhxhx ++=++
( ) 232221333231' hyhxhhyhxhy ++=++
Select four points in a plane with know coordinates
(linear in hij)
(2 constraints/point, 8DOF ⇒ 4 points needed)
Remark: No camera calibration necessary
Overkill, from projective to similarity are only 4 DOFs away
Removing Projective Distortion #2
From projective to affine
Locate and move line of infinity
From affine to similarity
Locate and move circular points

2D Rectification Hierarchy From perspective to affine
HHHH preserves line of infinity if and only ifHHHH is affine
From affine to similarity
HHHH preserves absolute conic (or circular points) if and only if HHHH is similarity
0
0
1
0
0
'
'
0
0
0
1
0
)(
1
0
0
1
0
0
1')(
32
333231
232221
131211
31
333231
232221
131211
=→
=
=→
=
⇒
=
=
−==⇐ ∞−−
−
∞
−
∞
h
hhh
hhh
hhh
y
x
h
hhh
hhh
hhh
y
x
TT
T
T
A lAt
0AlHl
0vAA
vvAv
AvAA
t
vA
v
tA
C
t
0R
0
tRHCHC
==→
=
⇒
=
=
==⇐
,1
0
1
1
)(
*
0
1
1
10
1
1
1**')(
2
T
TTT
T
T
T
T
T
T
T
T
ss
vv
s
ss

Affine rectification
v1 v2
l1
l2 l4
l3
l∞
21 vvl ×=∞
211 llv ×=
432 llv ×=
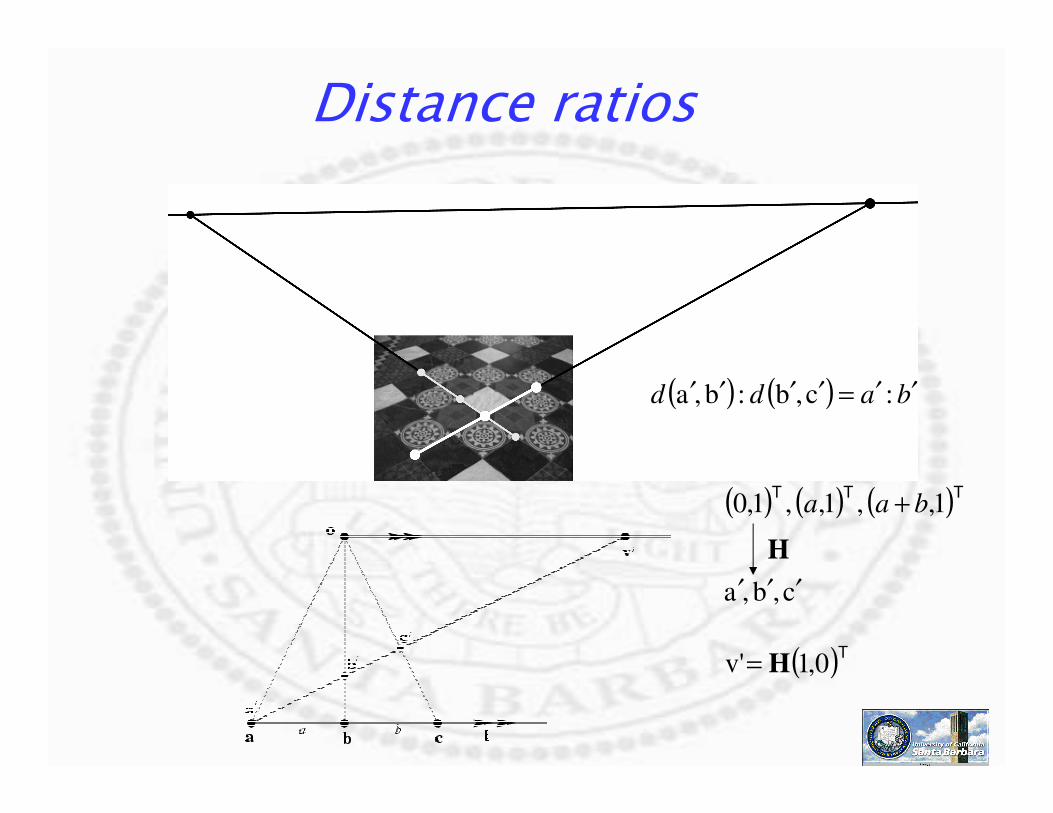
Distance ratios
( ) ( ) badd ′′=′′′′ :c,b:b,a
( )T0,1v' H=
( ) ( ) ( )TTT1,,1,,1,0 baa +
c,b,a ′′′
H

Metric from affine
( ) 000
0
3
2
1
321 =
′
′
′
′′′
m
m
m
lll
TKK
( )( ) 0,,,, 2
221211
2
12
2
1122122111 =+′′′′+′′′′T
kkkkkmlmlmlml

Image Formation
Specialization: camera is used as the projective device
Need to understand projection relationship of point, line, plane, conic, quadric, etc.
Need to dissect the camera matrix
Planar homography (discussed above) is a special case where 3D object is planar

Projective Relationship
Point
x=PXx=PXx=PXx=PX
X=X=X=X=PPPP++++xxxx (PPPP+=PPPPT(PPPPPPPPT)-1, PPPPPPPP+=I)
Line
Backprojection
π= PPPPTllll
((((xxxxTllll====0, (, (, (, (PX)PX)PX)PX)Tllll=0, =0, =0, =0, XXXXT ((((PPPPTllll)=0))=0))=0))=0)
[ ]
xKd
xKx
0
KxP
I0
K0K
IPP
1
11
1
0
−
−−
+
−
+
=
=
=
=
⇒
=
T
T
lKn
lKl
0
K
lP
T
T
T
T
T
=
=
=
=
0
π

More Projective Relationships
Point Conics Line Conics
Point Quadrics Plane Quadrics
Projection? Projection?Back-projection Envelop
Dual
Dual

Point Quadrics and Conics
Under the camera PPPP a conic CCCC back projects into a cone QQQQ= PPPPTTTTCP CP CP CP
Cone is a degenerate quadricCone is a degenerate quadricCone is a degenerate quadricCone is a degenerate quadric
Camera center is the null spaceCamera center is the null spaceCamera center is the null spaceCamera center is the null space
0)(
0)(
0)(
0
==
=⇒
=⇒
=
CCTT
TT
T
T
PCPCPP
XCPPX
CPXPX
Cxx

Plane Quadrics and Line Conics
Under the camera matrix P the outline of the quadric Q is the conic given by CCCC*=PQ*PPQ*PPQ*PPQ*PT
T
TT
TTT
TT
T
P*PQC
lP*PQl
lP*QlP
lPππ*Qπ
lCl
=⇒
=⇒
=⇒
==⇒
=
*
0)(
0)(
0
0*

Camera Calibration (cont.)
Why? Because we are interested in similaritysimilaritysimilaritysimilarityreconstruction xxxx =PXPXPXPX implies xxxx = (PHPHPHPH-1)(HXHXHXHX)
Even if we can perform reconstruction, the structure recovered is only up to HXHXHXHX (preserves co-linearity), which is not very useful
How does calibration help? xxxx =KR[I|0]X!= KR[I|0]HKR[I|0]X!= KR[I|0]HKR[I|0]X!= KR[I|0]HKR[I|0]X!= KR[I|0]H-1H XH XH XH X
If we know KKKK, you cannot fake R,R,R,R, except with another RRRR’’’’ (RHRHRHRH----1111 is not RRRR in general)
Reconstruction is similar to the original scene Angle, relative length can be measured

Proof
You can fool the camera (the same image and the same parameters) by
Using PHPHPHPH----1111 as projection matrix (with the same KKKK)
Using HXHXHXHX as the 3D scene
The matrix structure dictates similarity
]|'['
'
1
1
tRt'RRK0
t'Rt]|K[RPH
0
t'RH
PXt]X|K[Rx
λλ
λ
+=
=
=
==
−
−
T
T

Uncalibrated Camera
The same trick won’t work if you don’t know KKKK
M M M M has an RQ decomposition where
R R R R is upper triangular
QQQQ is orthogonal
RQMtCKRARK
]t|[RK
tRBtCRAKC
BAt]|K[RPH
C
BAH
PXt]X|K[Rx
==+=⇒
=
++=
=
=
==
−
T
T
T
T
''
'''
]|[1 λλ
λ

Camera Calibration (cont.)
Camera calibration does not give
Absolute scale
Absolute location
You cannot tell if you are flying over New York City or flying over a model of New York City in Santa Barbara
The best you can hope for with a single camera with no object of known scale

Camera Calibration
There are two components
Intrinsic parameters: independent of placement, dependent on camera used
Extrinsic parameters: dependent on placement, independent of camera used
Projective geometry constraint is on intrinsic parameters only
Other constraints have to be brought in to determine placement

Dissecting Camera Matrix
x=PX
RCTPCIKR
PTRK
Pr
r
r
PTR
p
3
2
1
−=−=
=
=
=
world
world
world
z
y
x
ov
ou
worldov
ou
real
t
t
t
vk
uk
vk
uk
]|[
]|[
100100
0010
0001
100
0
100100
0010
0001
100
0
α
α

More Simplification
In a camera-centered coordinate frame
RRRR is identity
CCCC is (0,0,0)
PPPP= KRKRKRKR[IIII|-CCCC] =KKKK[IIII|0000]
For affine camera, the camera center is at infinity and the focal length increase to infinity
PPPP becomes an affine matrix

3D Rectification Hierarchy From perspective to affine
HHHH preserves plane of infinity if and only ifHHHH is affine
From affine to similarity
HHHH preserves absolute conic (or absolute dual quadric) if and only if HHHHis similarity
0
0
0
0
0
1
0
)(
1
0
0
0
1
0
0
0
1')(
3332
31
44434241
34333231
24232221
14131211
==→
=→
=
⇒
=
=
−==⇐ ∞−−
−
∞
−
∞
hh
h
hhhh
hhhh
hhhh
hhhh
y
x
TT
T
T
A lAt
0AlHl
0vAA
vvAv
AvAA
t
vA
v
tA
Q
t
0R
0
tRHQHC
==→
=
⇒
=
=
==⇐
∞
∞
,1
0
1
1
1
)(
0
1
1
1
1
0
1
1
1
1*')(
*2
*
T
TTT
T
T
T
T
T
T
T
T
ss
kv
s
ss
More Details (Repetition)
Line in space
Point in P.o.I
Absolute conic in P.o.I
Plane in space
Line in P.o.I
Absolute dual quadric in space
0
001lim
3
2
1
=
=
+
=
∞
∞→
dCd
ddx
d
T
d
d
d
λλ
0
'
'
'
'
'
3
2
1
3
2
1
4
=
=×=
=
=
=
∞ππ
π
Q
nddl
ddn
T
d
d
d
d
d
d
n
Vanishing point
Iac
Vanishing line
iadc

More Details (Repetition)
0
0)()(
0
001lim
1
11
3
2
1
=
=
=
=
+
=
−−
−∞−
∞
∞→
xKKx
xKCxK
dCd
ddx
d
TT
T
T
d
d
d
λλ
[ ] 00
0
'
'
'
'
'
4
4
3
2
1
3
2
1
4
==
=
=×=
=
=
=
∞
lKKllK
0
0IKl
Q
nddl
ddn
TT
T
T
T
T
nn
d
d
d
d
d
d
n
ππ
π
Vanishing point
Iac
Vanishing line
iadc

Comparison
2D planar homography Plane to plane correspondence
Move line of infinity
Recover circular point
Similarity
3D planar homography
Image plane and plane at infinity correspondence
?
Recover absolute conic and dual absoluate conic
Similarity (determining intrinsic parameters)
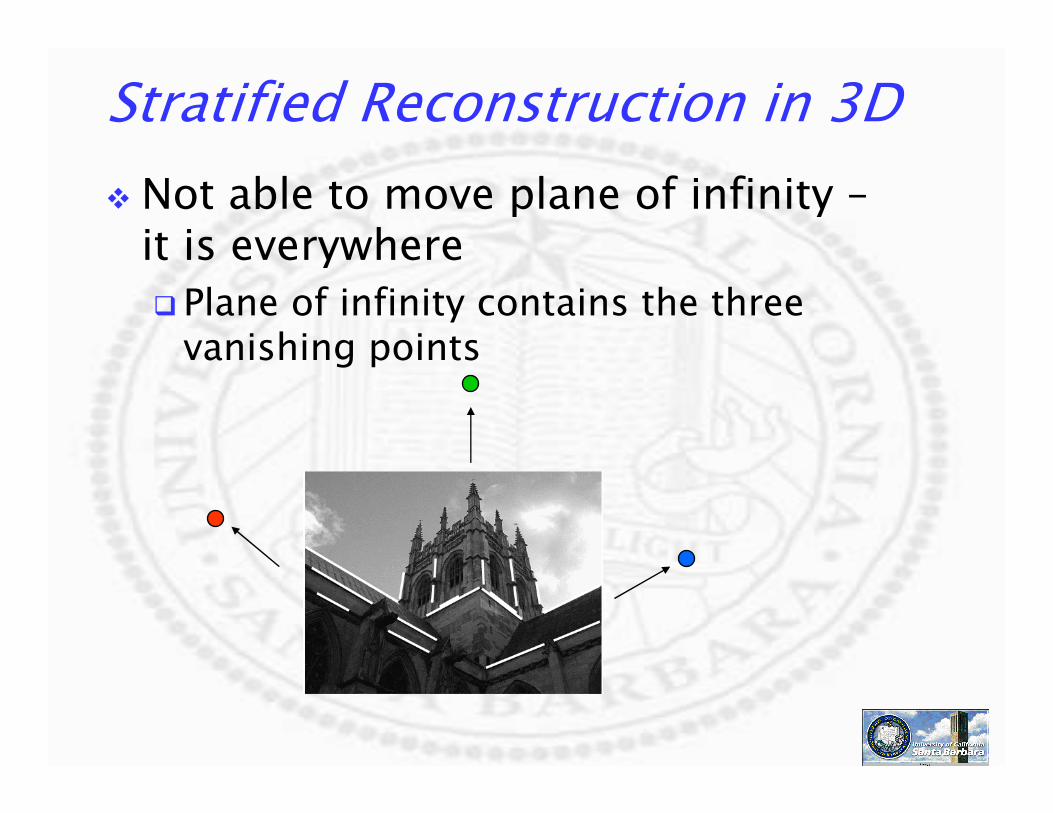
Stratified Reconstruction in 3D
Not able to move plane of infinity –it is everywhere
Plane of infinity contains the three vanishing points

Stratified Reconstruction in 3D
Parallel lines (of a single direction) on parallel planes have a single vanishing point (point at infinity)
Different sets of parallel lines (of multiple directions) on parallel planes have vanishing points on a single vanishing line (line at infinity)
Multiple sets of parallel planes (of multiple directions) have multiple vanishing lines (plane at infinity)

Measuring Directions Using camera
For image points For image lines
C x1
x2
d1
d2
θ
xKd
Kd
d0IK
dCPx
1
)01
](0|[
)01
(
−=
→=
+
=
+
=
λ
λ
C
x
d=K-1x
ln=KTl
lKn
lnK
nKx
nxK
ndlx
T
T
TT
T
TT
=⇒
=⇒
=⇒
=⇒
==
−
−
−
0)(
0)(
0,0
1

An Important Homography Relation
Images of plane at infinity and image plane form a planar homography
HdKRdd
CIKRXx ==
−== ∞
0]|[P

Projection of AC and ADQ
Image of absolute conic (iac)
Image of absolute dual quadric (iadc)
TTT
TT
TT
TT
KKKKRR
KRC
I
00
0IC|IKR
KKKRIKR
PPQHCH
==
−
−=
==
=→
−−−
∞
−
∞
−
][)()()( 11
**1
ω
ωω
If iac or idac can be recovered, camera can be calibrated
But How?
The pole-polar relation
xKdKdd
IKx 1
1]0|[ −=→=
=
λ
2
1
21
1
1
2
1
1
2
1
2
1
1
1
1
1
2
1
1
1
2211
21
)()(
)(
)()()()(
)()(cos
xKKxxKKx
xKKx
xKxKxKxK
xKxK
dddd
dd
−−
−
−−−−
−−
=
==
TTTT
TT
TT
T
TT
T
θ
Similar to planar homography case, where conic of circular points determines pole-polar relationship in a plane (special case)

General Procedure
Measure 2D image points (x1, x2x1, x2x1, x2x1, x2)
Relate that to 3D direction (d1, d2d1, d2d1, d2d1, d2)
Impose constraints on θ (e.g., some directions are orthogonal)
But how do we know two directions are perpendicular?
C x1
x2
d1
d2
θ

Yet Another Dual Relation
Vanishing point
Images of lines
Invariant measure using AC
Vanishing line
Images of planes
Invariant measure using IAC
point vanishing
)()()(,
0
111
21
→
==→
=
−−−−
∞
−
∞
d
KKKRIKRωHCHω
dCd
TTT
T
line anishing
][,
0
***
2
*
1
v
TTT
TTT
T
→
==
−
−=→
=
∞
∞
π
KKKKRR
KRC
I
00
0IC|IKRPPQω
πQπ
ω
Proof for Vanishing Points
0
0))(()(
0
)()()(,
,0
21
2
1
1
2
1
1
111
21
=⇒
=⇒
=⇒
==→
==
−
∞
−
−
∞
−
−−−−
∞
−
∞
ωxx
HdHCHHd
HdHCHHd
KKKRIKRωHCHω
HdxdCd
TT
TTT
TTT
T

Proof for Vanishing Lines
[ ]
[ ]
0
0
01
1
01
1
][,
,0
2
*
1
21
2
T
1
2
1
***
T
2
*
1
=⇒
=⇒
=
⇒
=
⇒
==
−
−=→
==
∞
∞
lωl
lKKl
lK
00
0IKl
n
00
0In
KKKKRR
KRC
I
00
0IC|IKRPPQω
lKnπQπ
T
T
TTT
TTT
T
ω

( ) ( ) λKdaλPDPAλPXλx +=+==
( ) ( ) KdλKda limλ xlimvλλ
=+==∞→∞→
KdPXv == ∞
Vanishing points

Vanishing lines

Vanishing Points and Vanishing Lines
If you can locate vanishing points and lines in images, then you can know their 3D directions (in camera’s coordinate system)
Using domain knowledge you can impose constraints on KKKK

A Hybrid Relation
For a line and a plane in space
We have a point (x) and a line (l) in image
l=l=l=l=wxwxwxwx, x=w*l , x=w*l , x=w*l , x=w*l if they are orthogonal
Proof left as an exercise

compute H for each square
(corners (0,0),(1,0),(0,1),(1,1))
compute the imaged circular points H(1,±i,0)T
fit a conic to 6 circular points
compute KKKK from wwww through Cholesky factorization
Using Homography

Using Other Relationships
Image plane
Two vanishing points
1 vanishing point + 1 vanishing line
Plane
3D space
Two orthogonal lines
Orthogonal line and plane
Plane