Embed Size (px)
Citation preview
Overview of SomeOverview of Some Coherent Coherent Noise Filtering MethodsNoise Filtering Methods
Jianhua Yue, Yue Wang, Gerard SchusterJianhua Yue, Yue Wang, Gerard SchusterUniversity of UtahUniversity of Utah
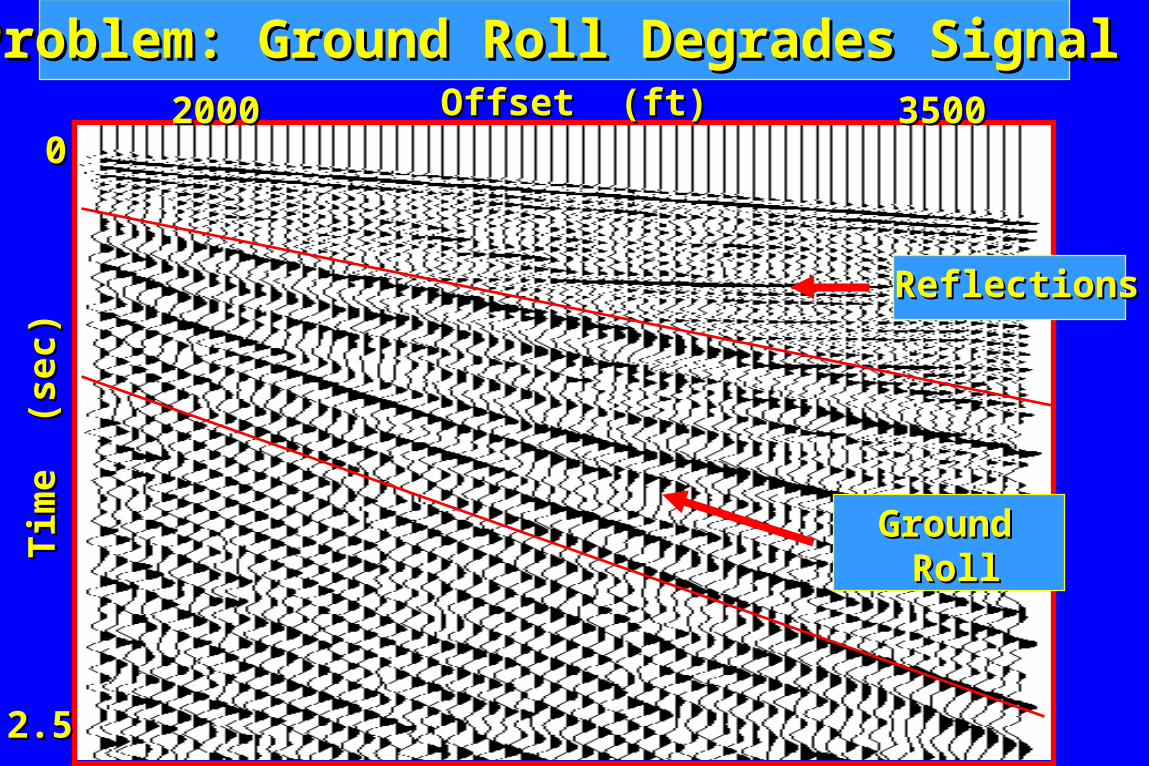
Problem: Ground Roll Degrades SignalProblem: Ground Roll Degrades SignalOffset (ft)Offset (ft)
Tim
e (
sec)
Tim
e (
sec)
003500350020002000
2.52.5
ReflectionsReflections
Ground Ground RollRoll
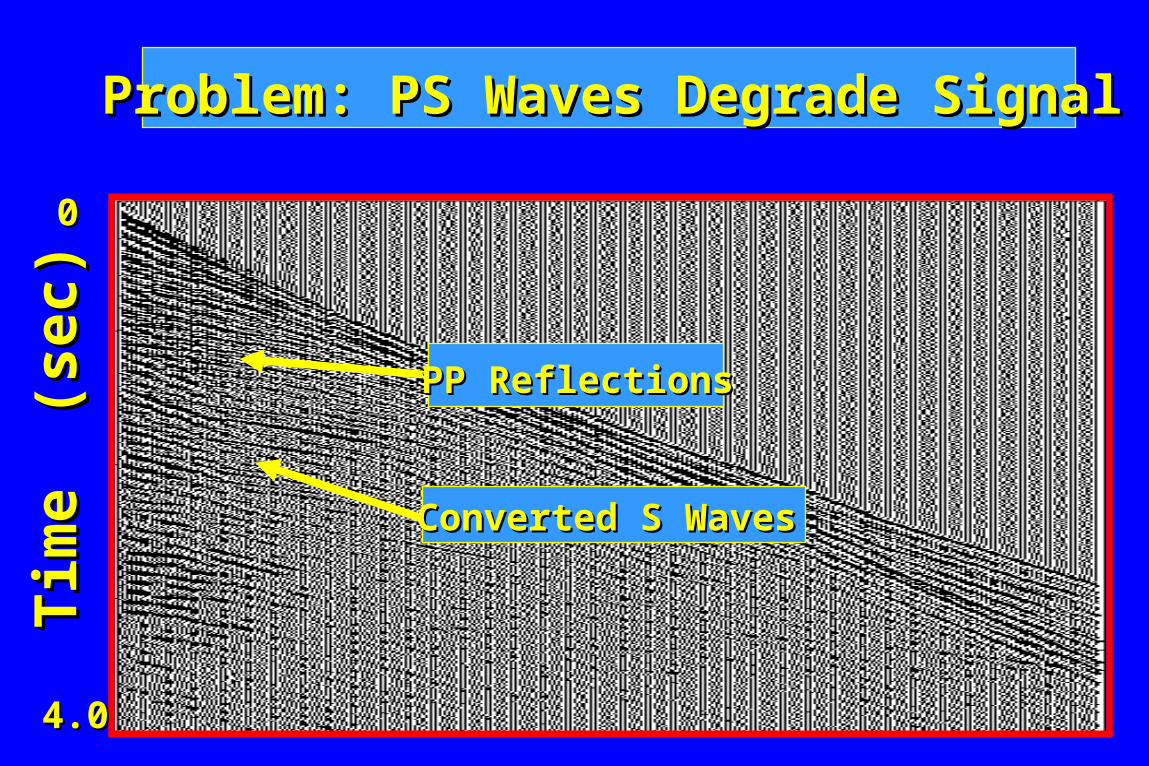
Problem: PS Waves Degrade SignalProblem: PS Waves Degrade SignalT
ime
(se
c)T
ime
(se
c)
00
4.04.0
PP ReflectionsPP Reflections
Converted S WavesConverted S Waves
Tim
e (
sec)
Tim
e (
sec)
4.04.0
ReflectionsReflections
Converted S WavesConverted S Waves
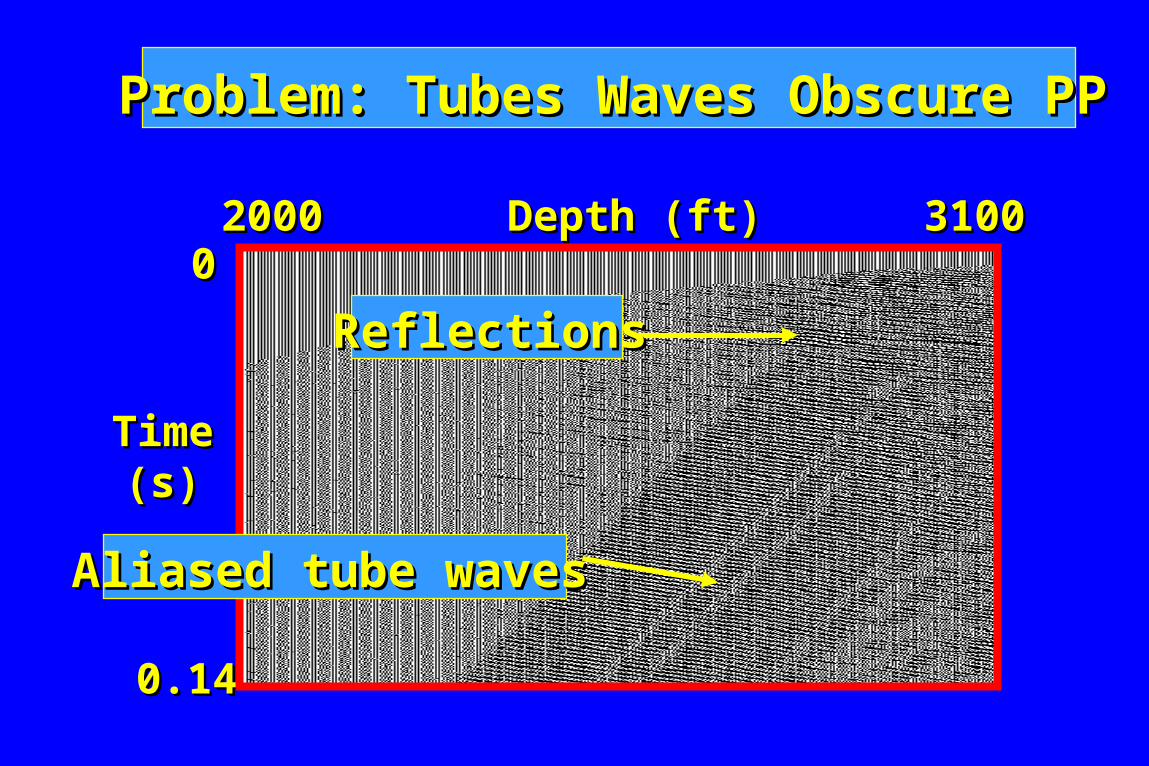
31003100Depth (ft)Depth (ft)2000200000
TimeTime(s)(s)
0.140.14
Problem: Tubes Waves Obscure PPProblem: Tubes Waves Obscure PP
ReflectionsReflections
Aliased tube wavesAliased tube waves
• Radon Filtering MethodsRadon Filtering Methods• ARCO Field Data ResultsARCO Field Data Results• Saudi Land DataSaudi Land Data• Multicomponent Data ExampleMulticomponent Data Example• Conclusion and DiscussionConclusion and Discussion
OutlineOutline
Two Classes of CoherentTwo Classes of CoherentNoise FilteringNoise Filtering
Model Noise and Adaptive SubtractionModel Noise and Adaptive Subtraction
Filter that Exploit Moveout DifferencesFilter that Exploit Moveout Differences
F-K Dip FilteringF-K Dip Filtering
Filtering Methods:Filtering Methods:Moveout SeparationMoveout Separation
Filtering in Filtering in - p - p domaindomain linear linear - p - p parabolic parabolic - p - p hyperbolic hyperbolic - p - p local+adaptive subtractionlocal+adaptive subtractionLeast Squares Migration FilterLeast Squares Migration Filter
DistanceDistance
Tim
eT
ime
NOISENOISE
SIGNALSIGNAL
WavenumberWavenumber
Fre
qu
ency
Fre
qu
ency
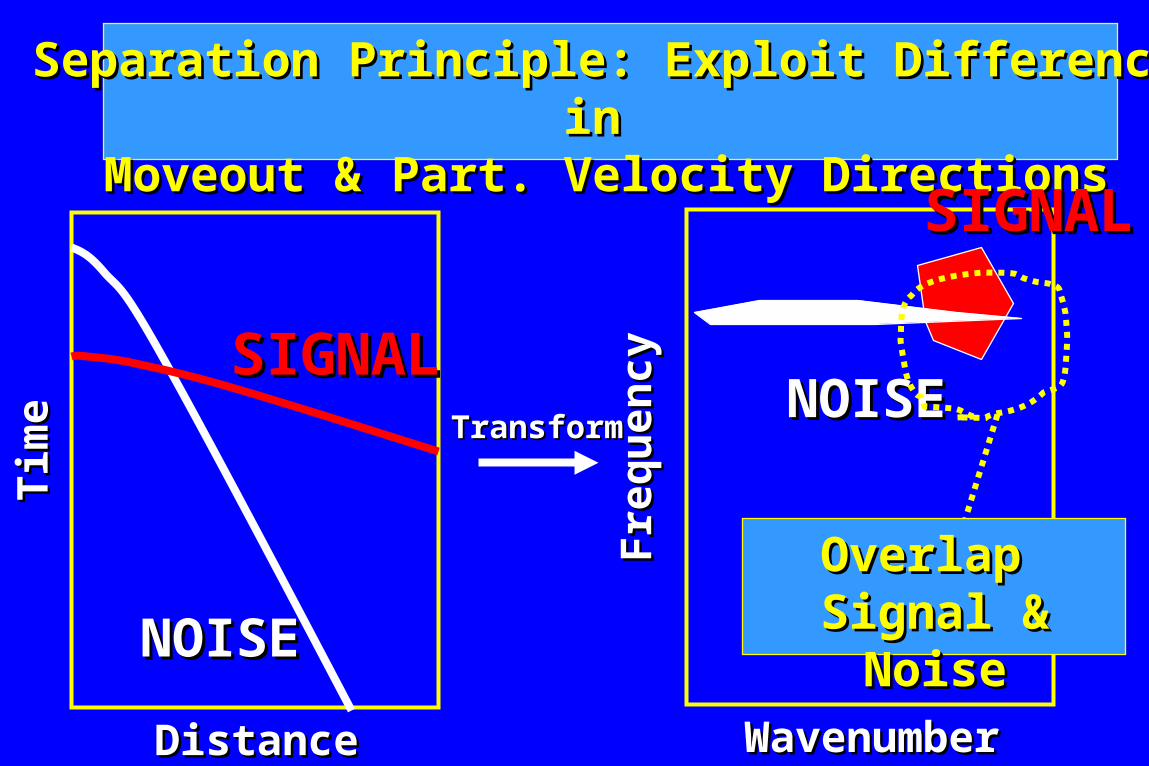
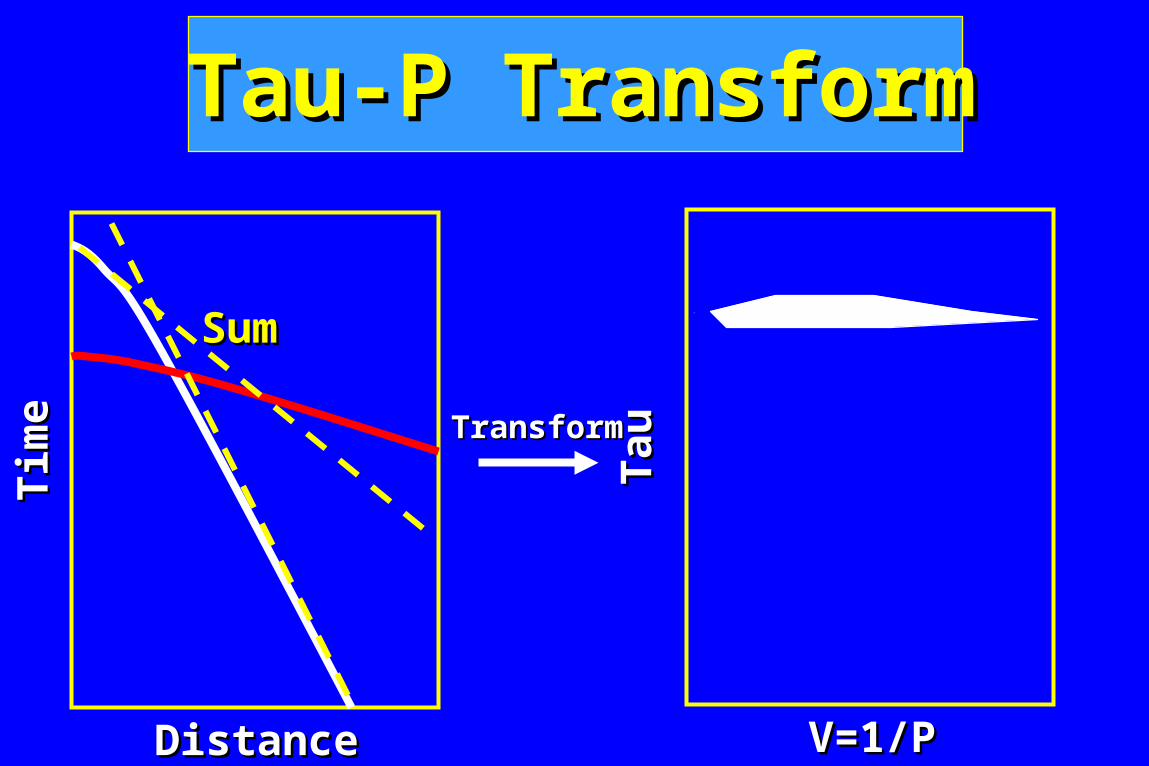
Separation Principle: Exploit Differences in Separation Principle: Exploit Differences in Moveout & Part. Velocity DirectionsMoveout & Part. Velocity Directions
SIGNALSIGNAL
NOISENOISETransformTransform
Overlap Overlap Signal & NoiseSignal & Noise
DistanceDistance
Tim
eT
ime
V=1/PV=1/P
Tau
TauTransformTransform
SumSum
Tau-P TransformTau-P Transform
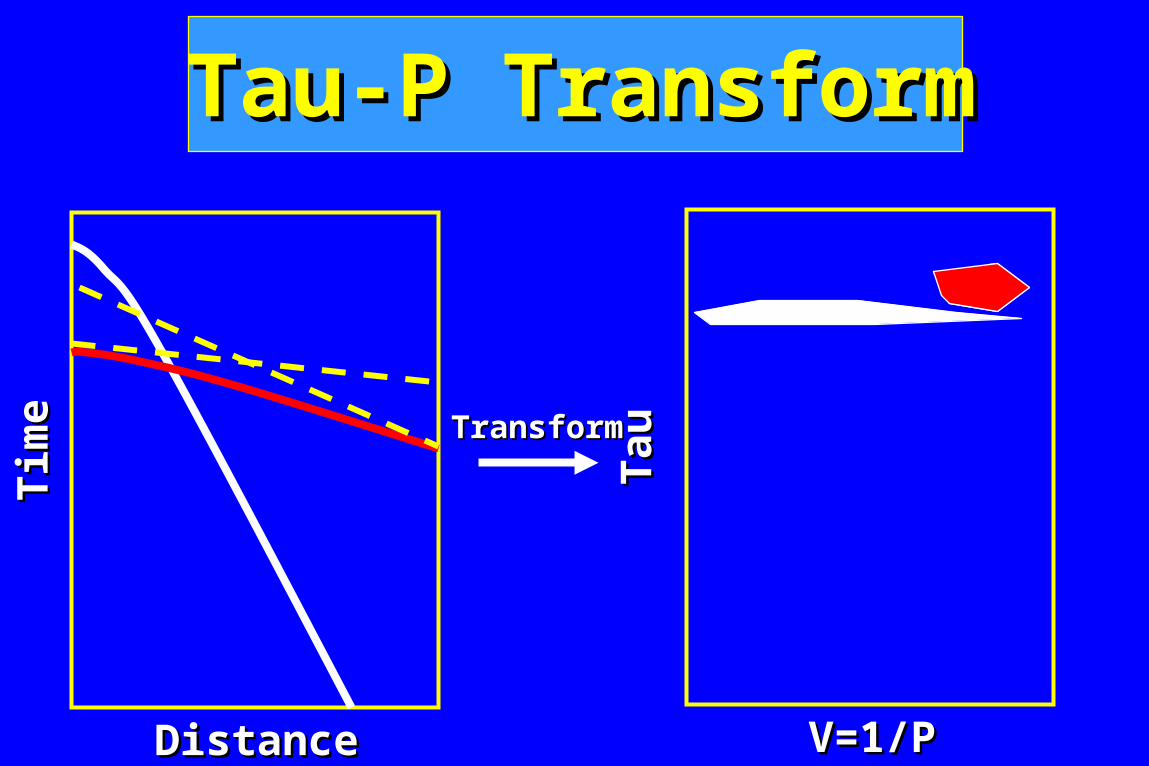
DistanceDistance
Tim
eT
ime TransformTransform
Tau-P TransformTau-P Transform
Tau
Tau
V=1/PV=1/P
DistanceDistance
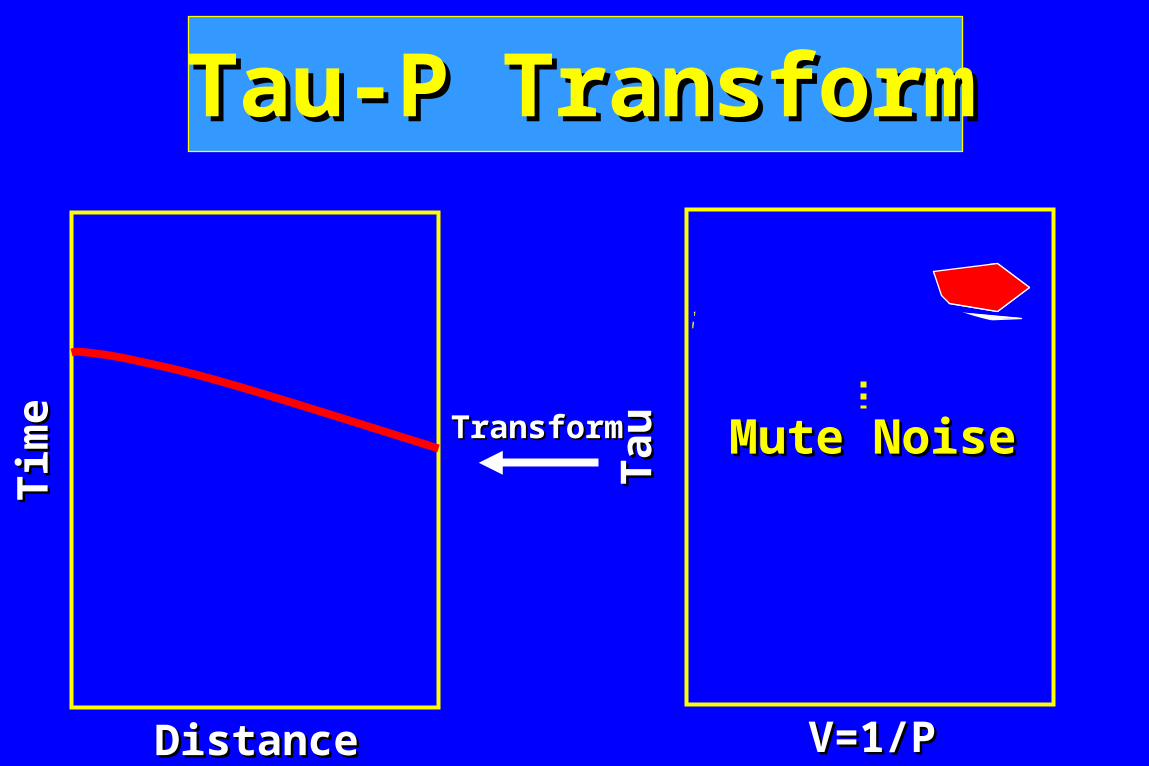
Tim
eT
ime TransformTransform Mute NoiseMute Noise
Tau-P TransformTau-P Transform
Tau
Tau
V=1/PV=1/P
Tau
Tau
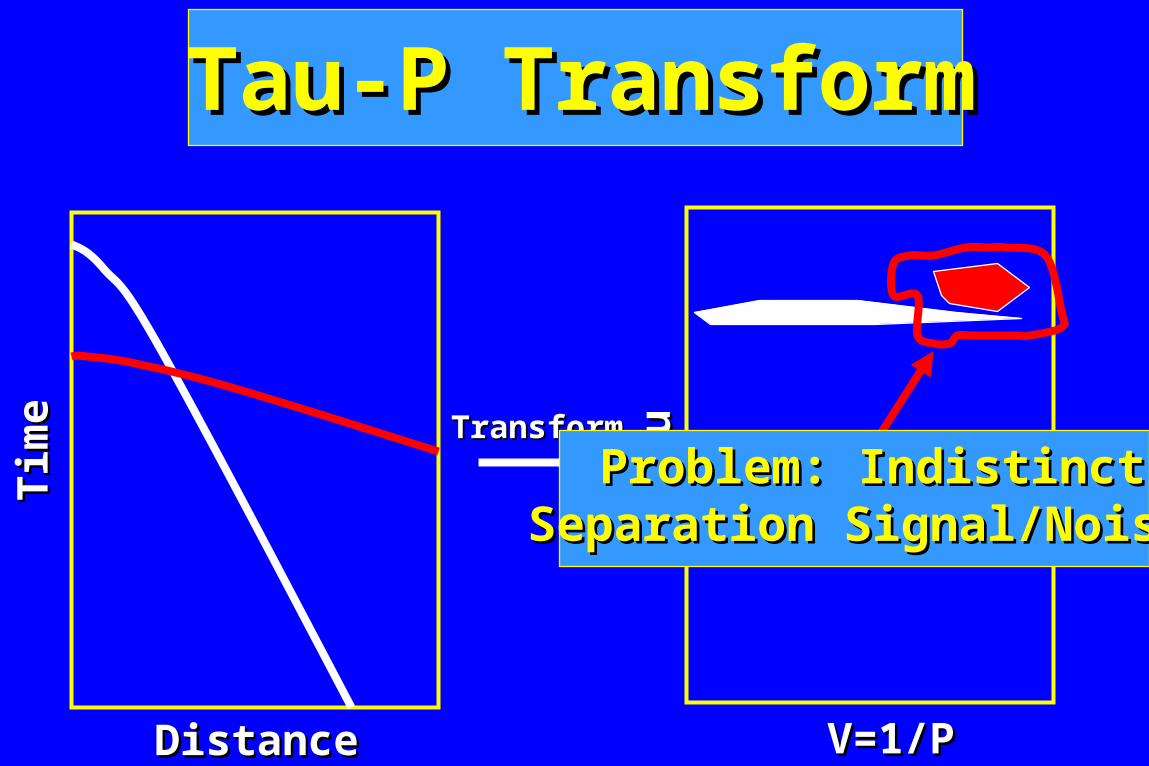
DistanceDistance
Tim
eT
ime TransformTransform
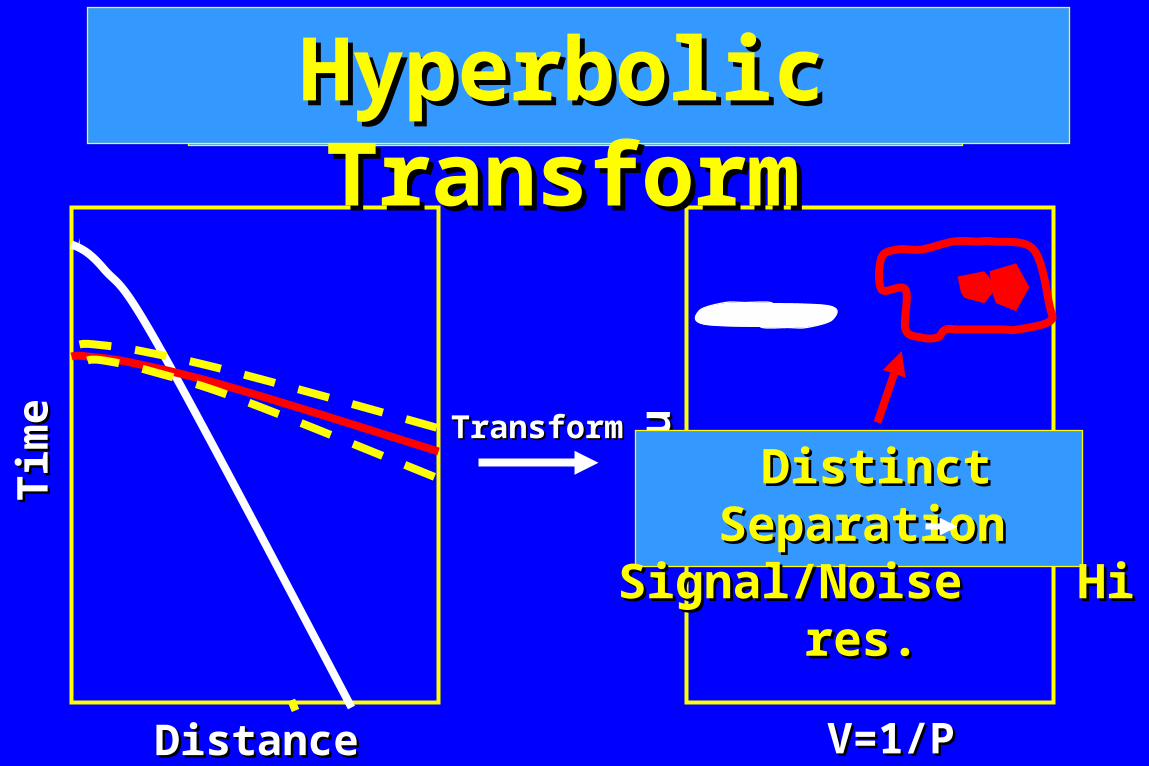
Problem: IndistinctProblem: IndistinctSeparation Signal/NoiseSeparation Signal/Noise
V=1/PV=1/P
Tau-P TransformTau-P Transform
Tau
Tau
DistanceDistance
Tim
eT
ime TransformTransform
V=1/PV=1/P
Tau-P TransformTau-P Transform Hyperbolic TransformHyperbolic Transform
Distinct SeparationDistinct Separation Signal/Noise Hi res.Signal/Noise Hi res.
DistanceDistanceT
ime
Tim
e
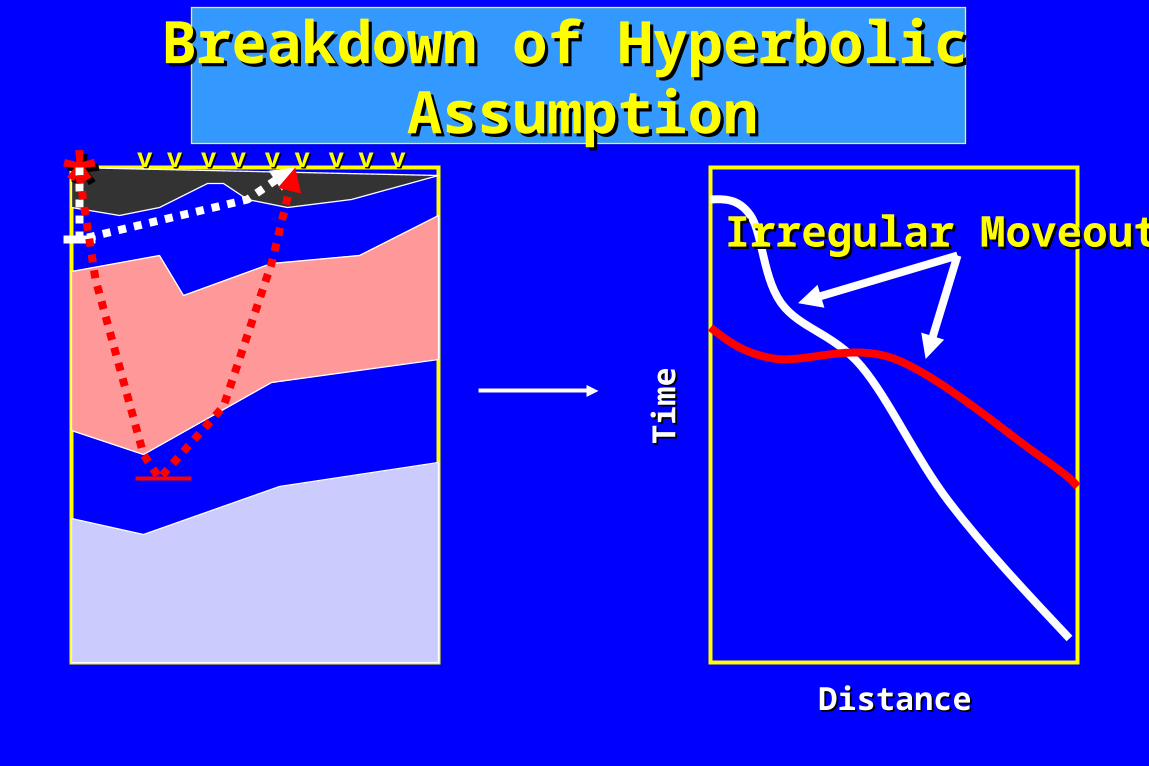
Breakdown of Hyperbolic Breakdown of Hyperbolic AssumptionAssumption
vv vv vv vv vv vv vv vv vv**Irregular MoveoutIrregular Moveout
DistanceDistance
Tim
eT
ime
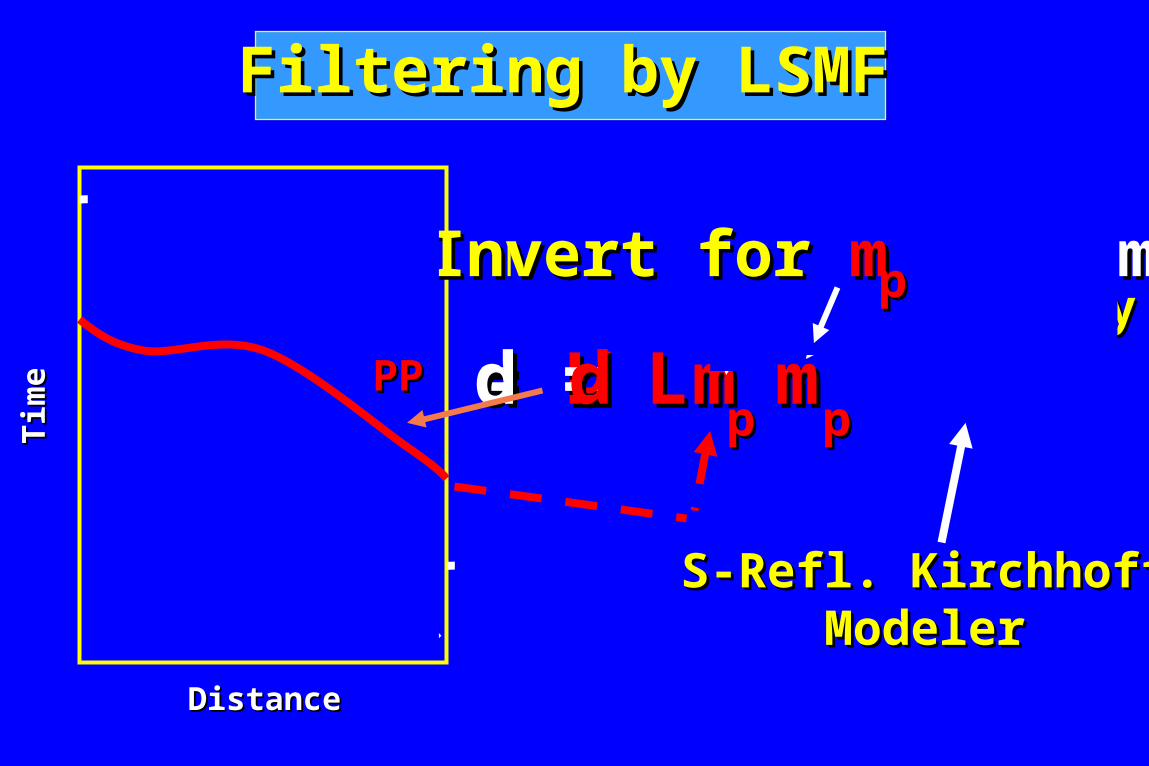
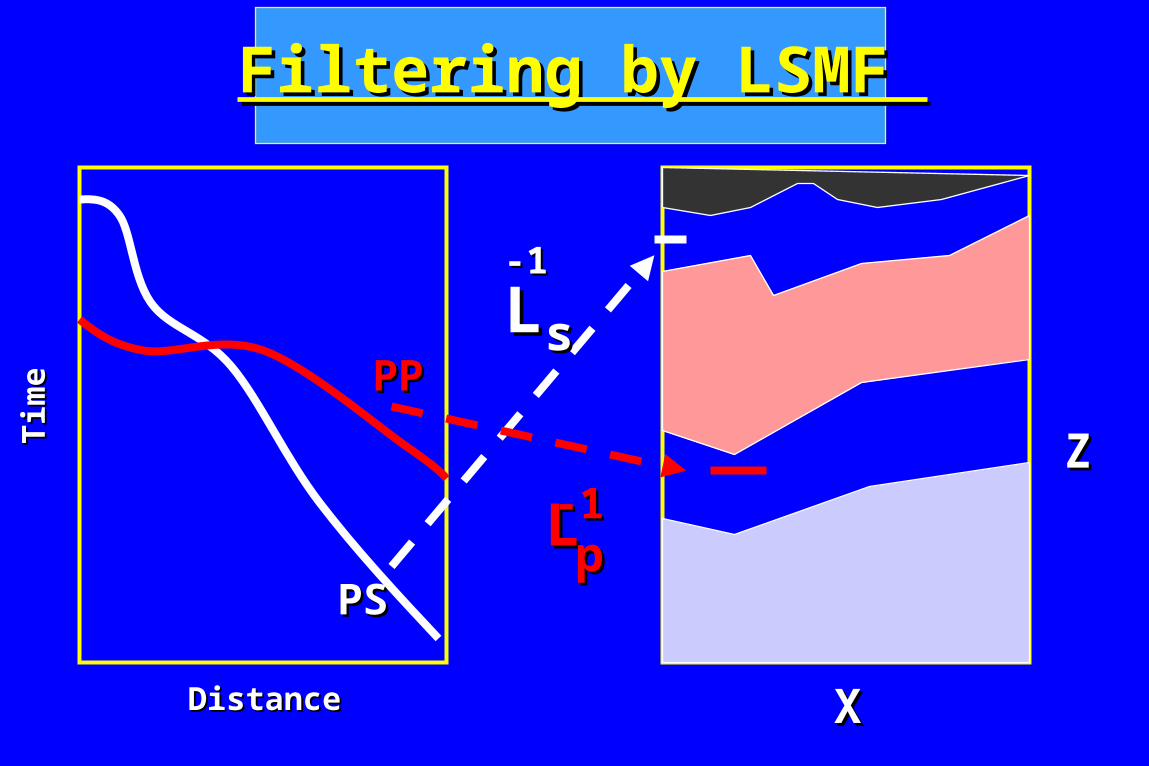
Filtering by LSMF Filtering by LSMF
PSPS
d =d = L m L m pp pp
d =d = L m L m ++ L mL mssss
P-reflectivityP-reflectivityKirchhoffKirchhoffModelerModeler
Invert for Invert for mm & & mmpp ss
ddPPPP
S-Refl. KirchhoffS-Refl. KirchhoffModelerModeler
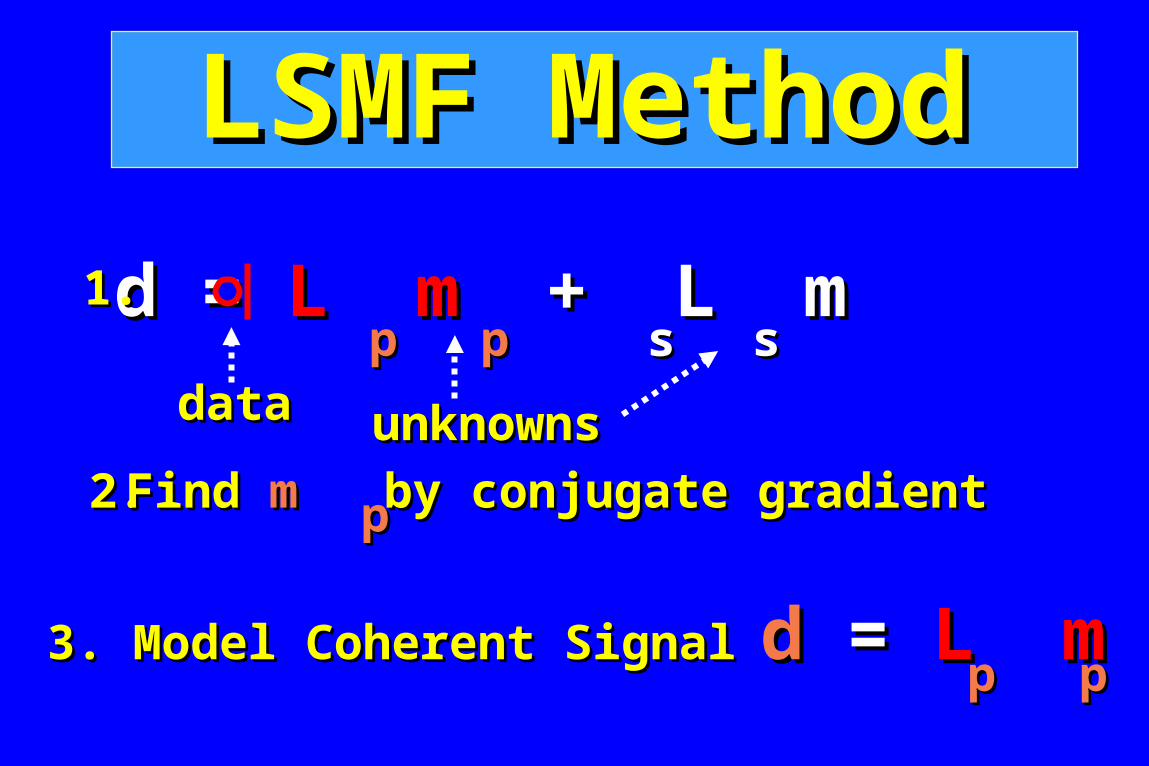
LSMF MethodLSMF Method
2.2. Find Find mm by conjugate gradient by conjugate gradientpp
d =d = L m L m ++ L mL msssspp pp
1.1.
datadata unknownsunknowns
dd = = L m L m pp pp
3. Model Coherent Signal3. Model Coherent Signal
OutlineOutline• Radon Filtering MethodsRadon Filtering Methods• ARCO Surface Wave DataARCO Surface Wave Data• Saudi Land Data: Local Adapt.+Subt.Saudi Land Data: Local Adapt.+Subt.• Multicomponent Data ExampleMulticomponent Data Example• Conclusion and DiscussionConclusion and Discussion
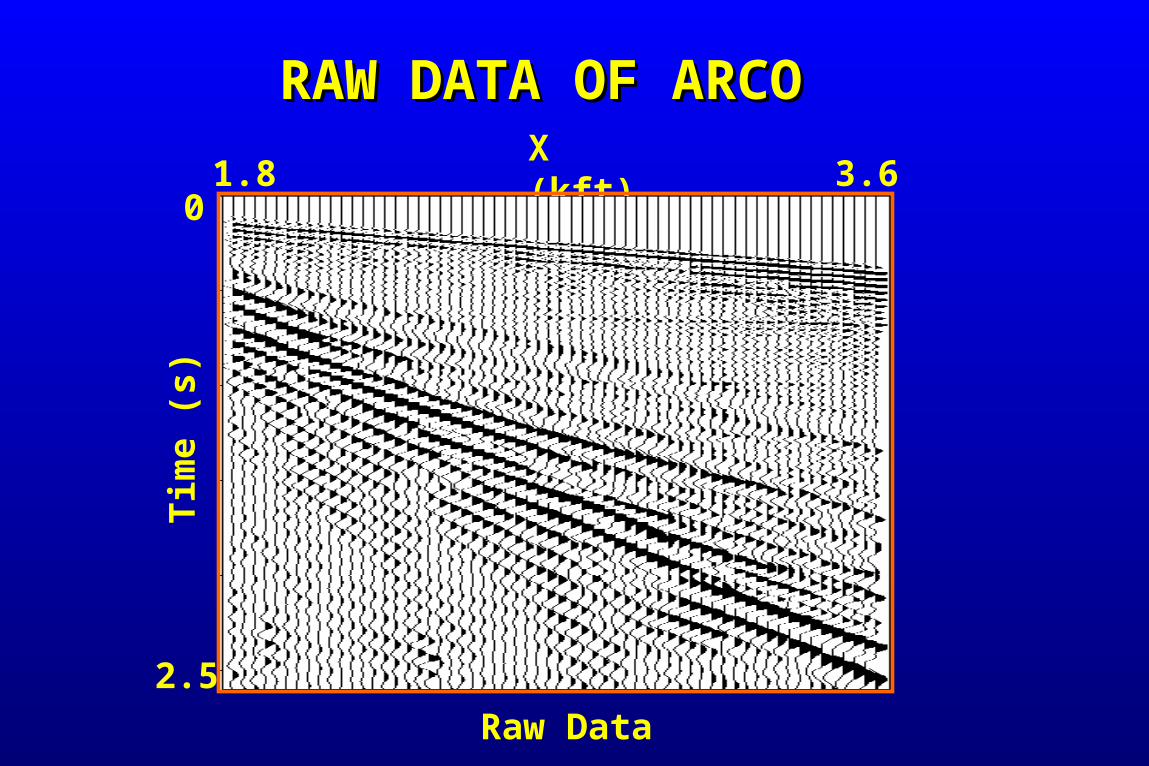
RAW DATA OF ARCORAW DATA OF ARCO
Tim
e (s
)0
2.5
1.8 3.6X (kft)
Raw Data
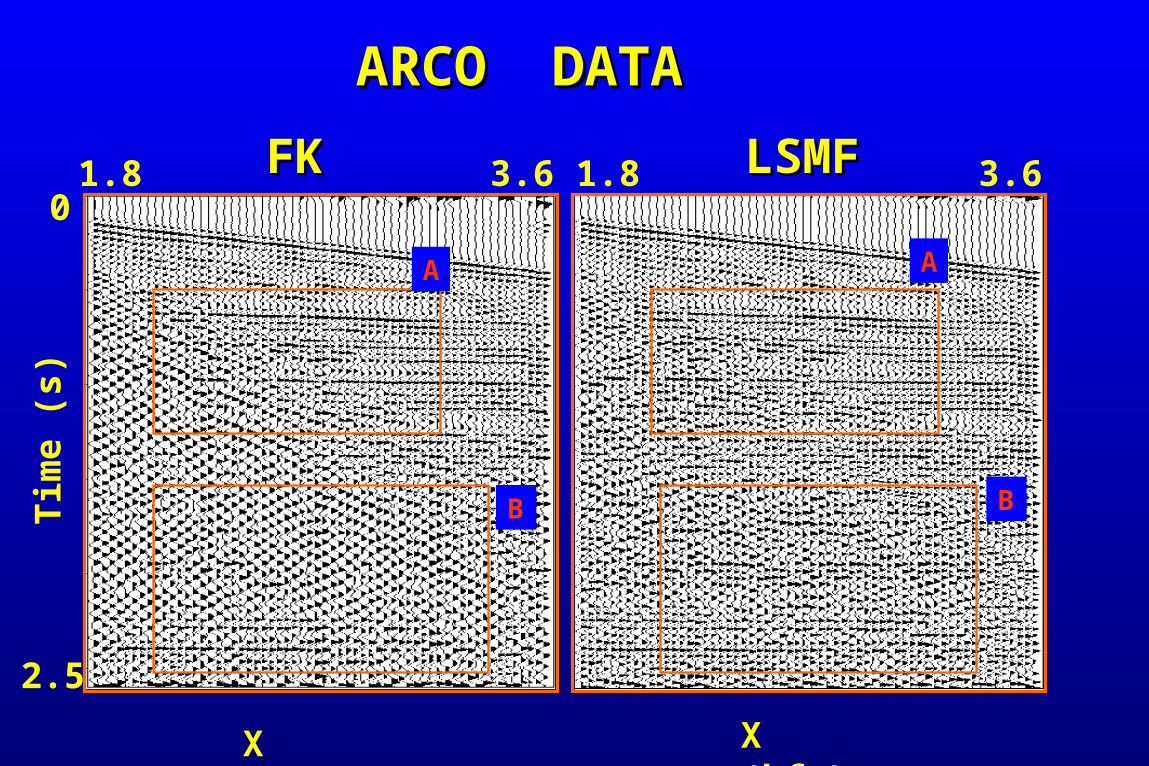
ARCO DATAARCO DATAT
ime
(s)
0
2.5
1.8 3.6 1.8 3.6
X (kft) X (kft)
FKFK LSMFLSMF
A
B
A
B
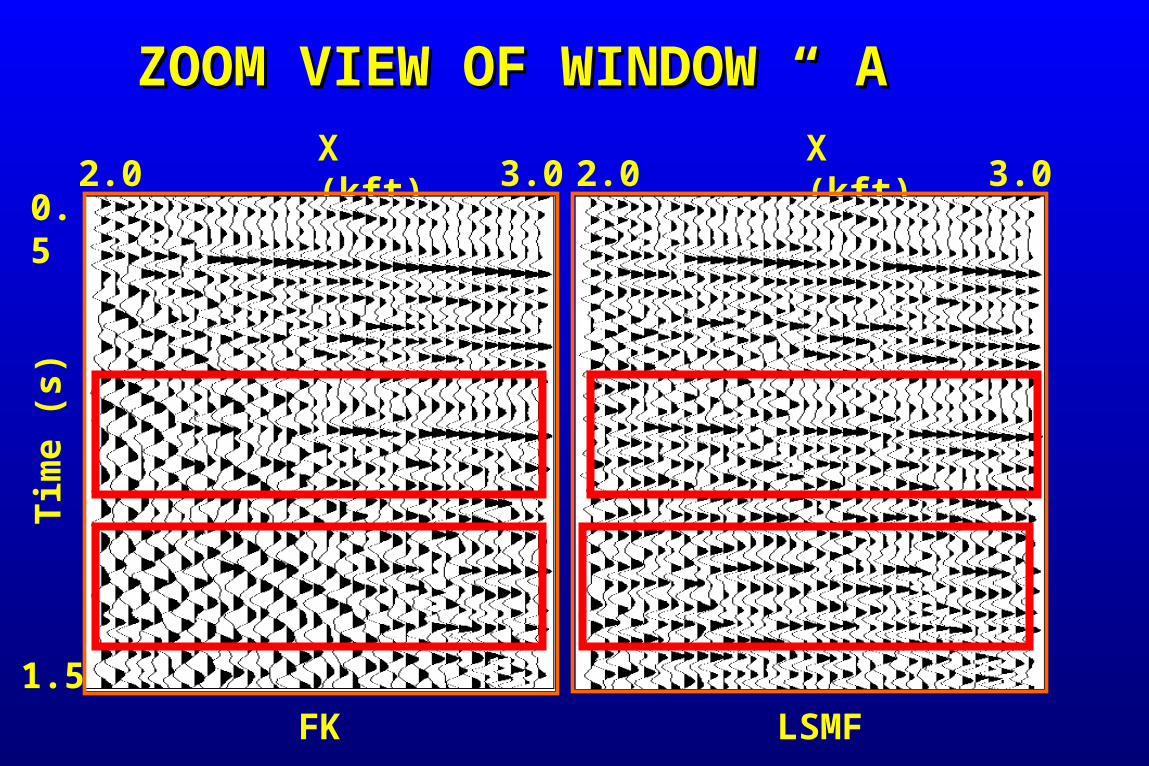
ZOOM VIEW OF WINDOW “ A”ZOOM VIEW OF WINDOW “ A”T
ime
(s)
0.5
1.5
2.0 3.0X (kft)
2.0 3.0X (kft)
FK LSMF
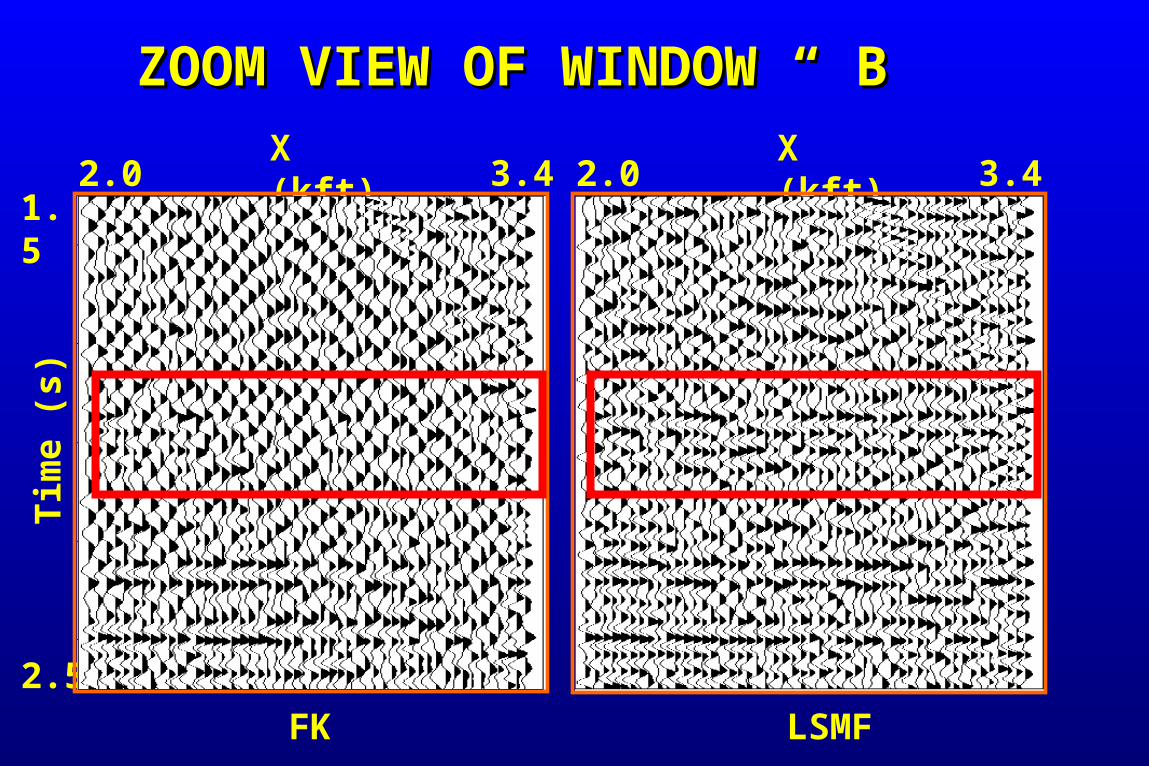
Tim
e (s
)
1.5
2.5
2.0 3.45X (kft)
2.0 3.45X (kft)
FK LSMF
ZOOM VIEW OF WINDOW “ B”ZOOM VIEW OF WINDOW “ B”
OutlineOutline• Radon Filtering MethodsRadon Filtering Methods• ARCO Surface Wave DataARCO Surface Wave Data• Saudi Land Data: Local Adapt.+Subt.Saudi Land Data: Local Adapt.+Subt.• Multicomponent Data ExampleMulticomponent Data Example• Conclusion and DiscussionConclusion and Discussion
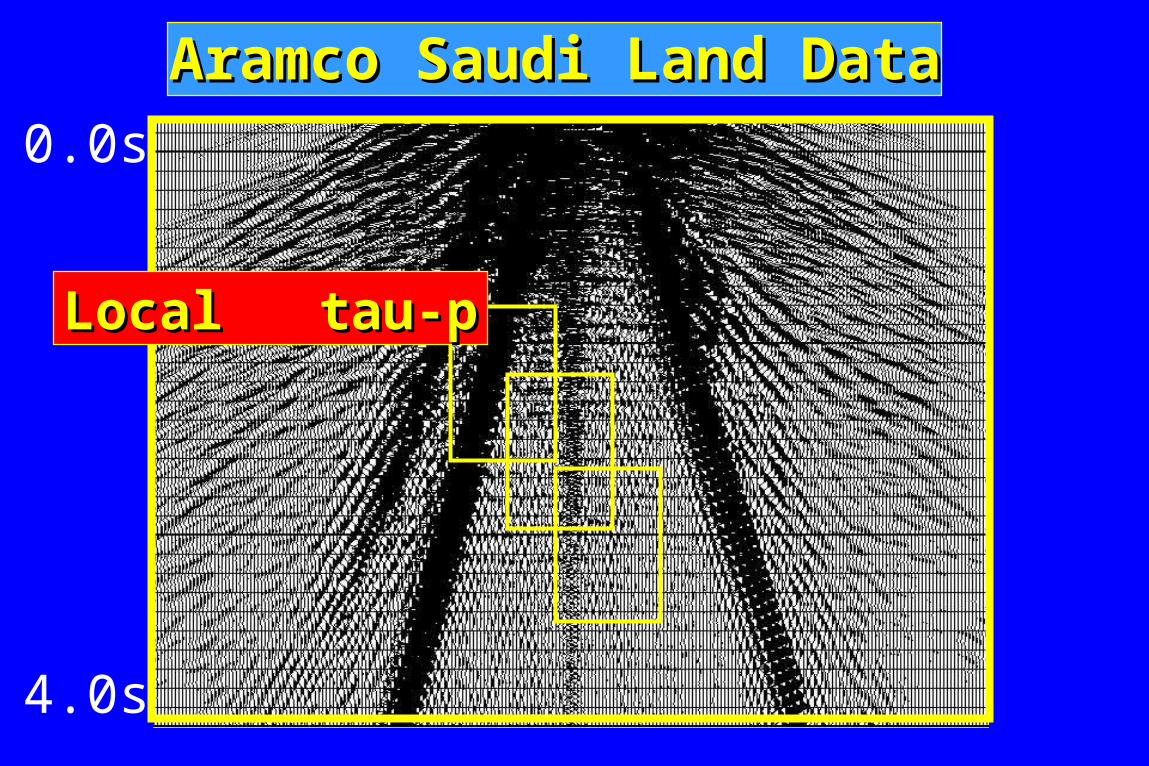
4.0s
Aramco Saudi Land Data Aramco Saudi Land Data
0.0s
Local tau-pLocal tau-p
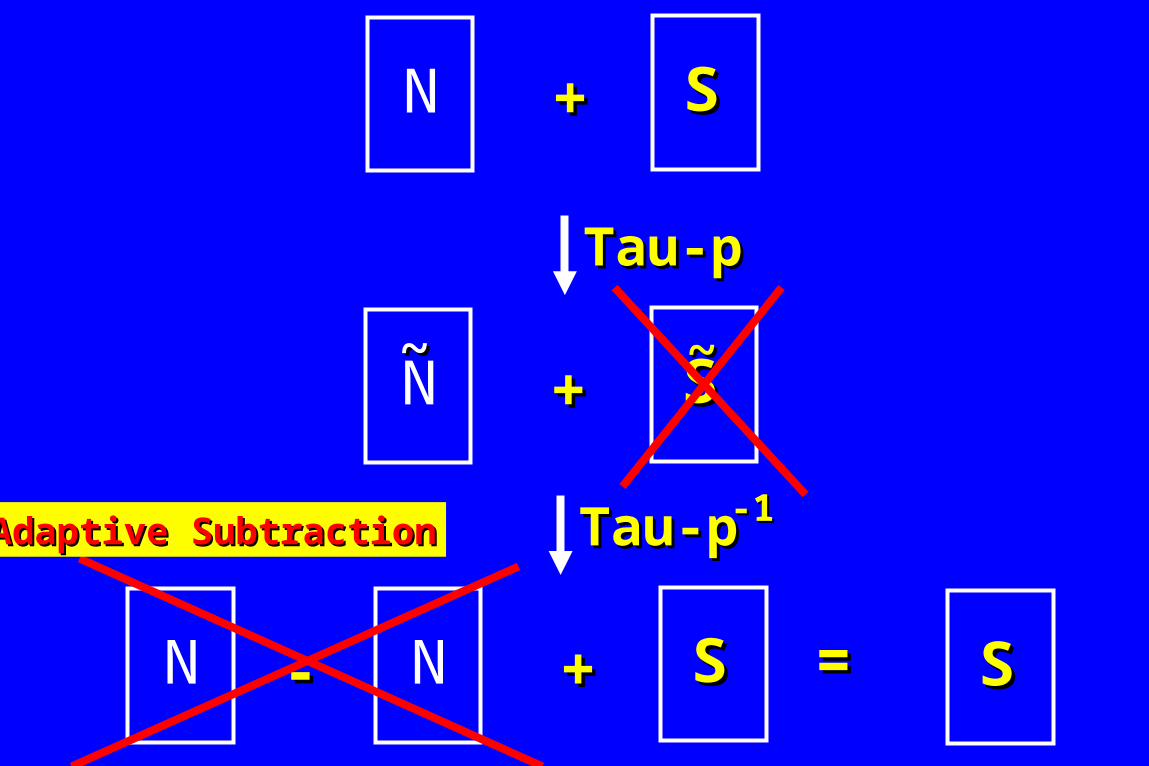
N SS++
N SS++~~~~
Tau-pTau-p
Tau-pTau-p -1-1
N N SS++-- == SS
Adaptive SubtractionAdaptive Subtraction
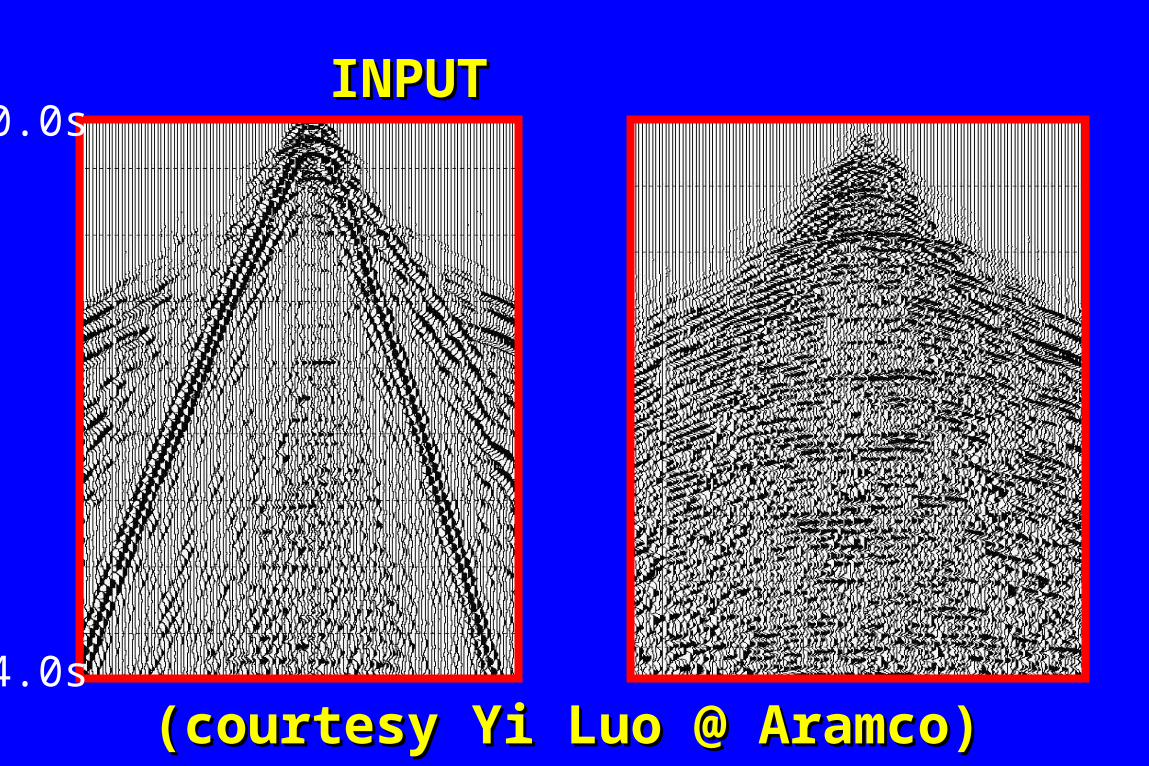
Input After Noise ReductionInput After Noise ReductionInput After Noise ReductionInput After Noise Reduction
INPUT LOCAL TAU-PINPUT LOCAL TAU-P
(courtesy Yi Luo @ Aramco)(courtesy Yi Luo @ Aramco)4.0s
0.0s
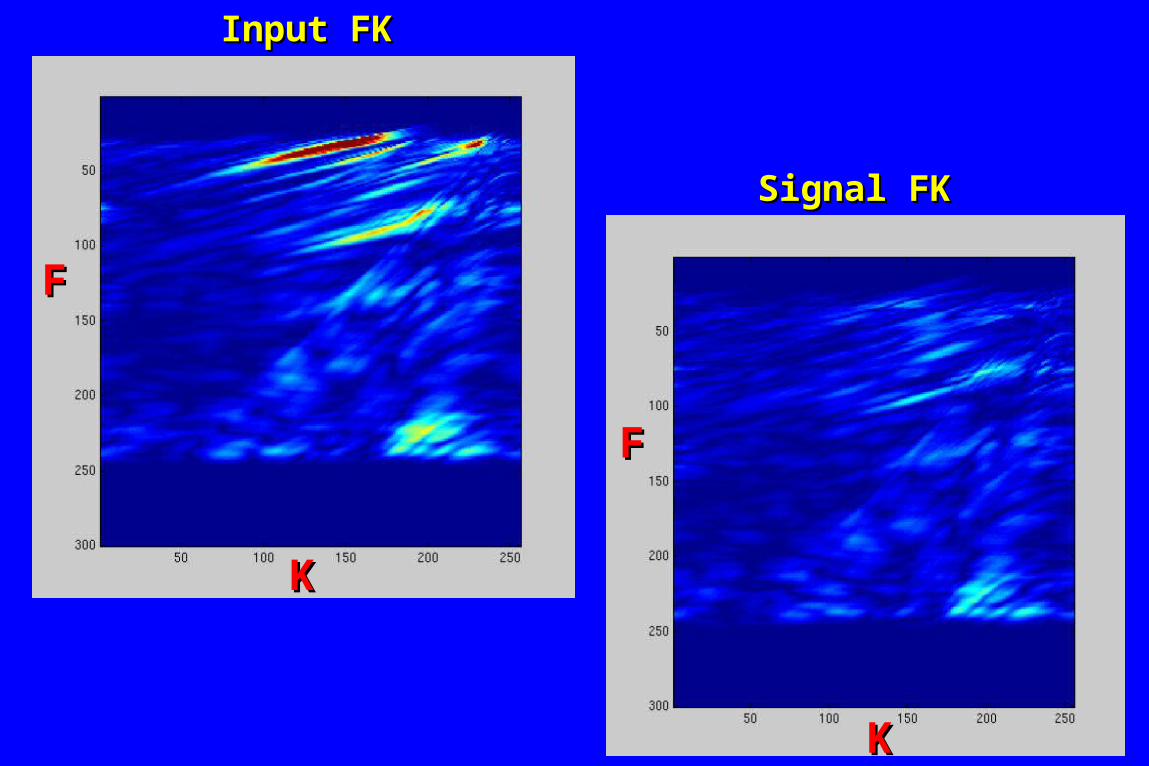
Input FKInput FK
Signal FKSignal FK
FF
KK
FF
KK
• Radon Filtering MethodsRadon Filtering Methods• ARCO/Saudi Field Data ResultsARCO/Saudi Field Data Results• Multicomponent Data ExampleMulticomponent Data Example Graben ExampleGraben Example
Mahagony ExampleMahagony Example
• Conclusion and DiscussionConclusion and Discussion
OutlineOutline
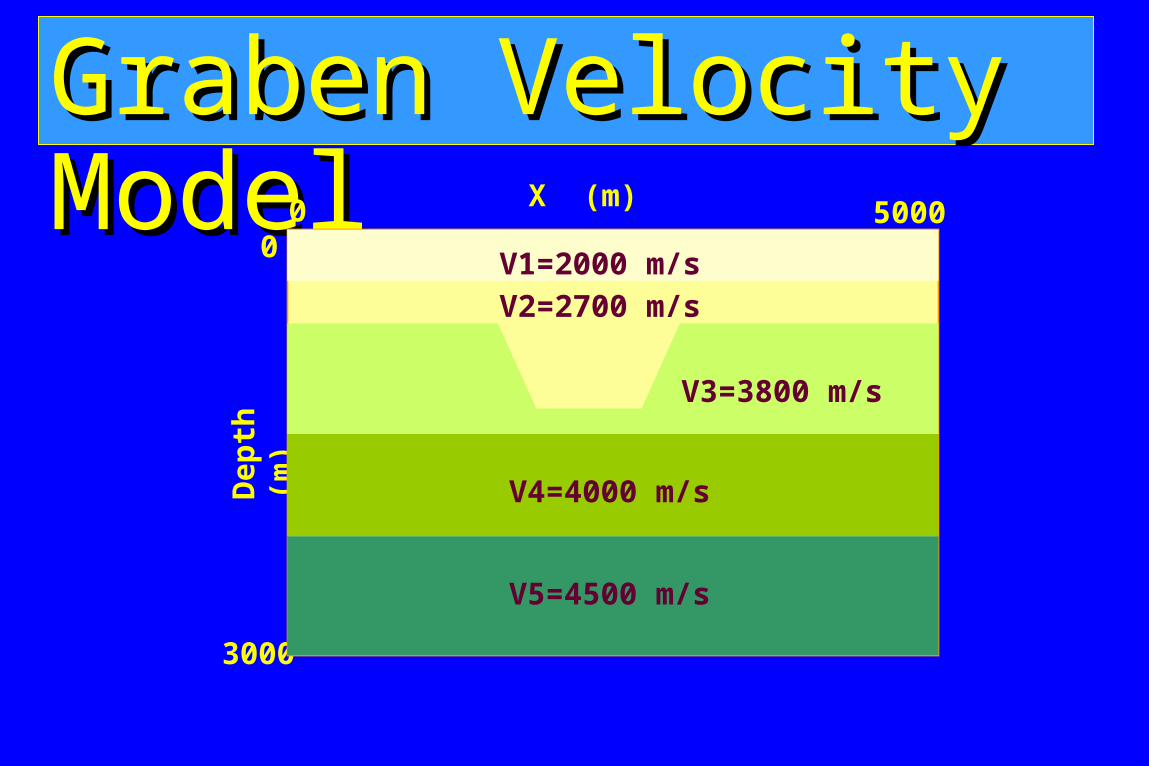
Graben Velocity ModelGraben Velocity Model
05000
Dep
th (
m)
3000
0 X (m)
V1=2000 m/s
V2=2700 m/s
V3=3800 m/s
V4=4000 m/s
V5=4500 m/s
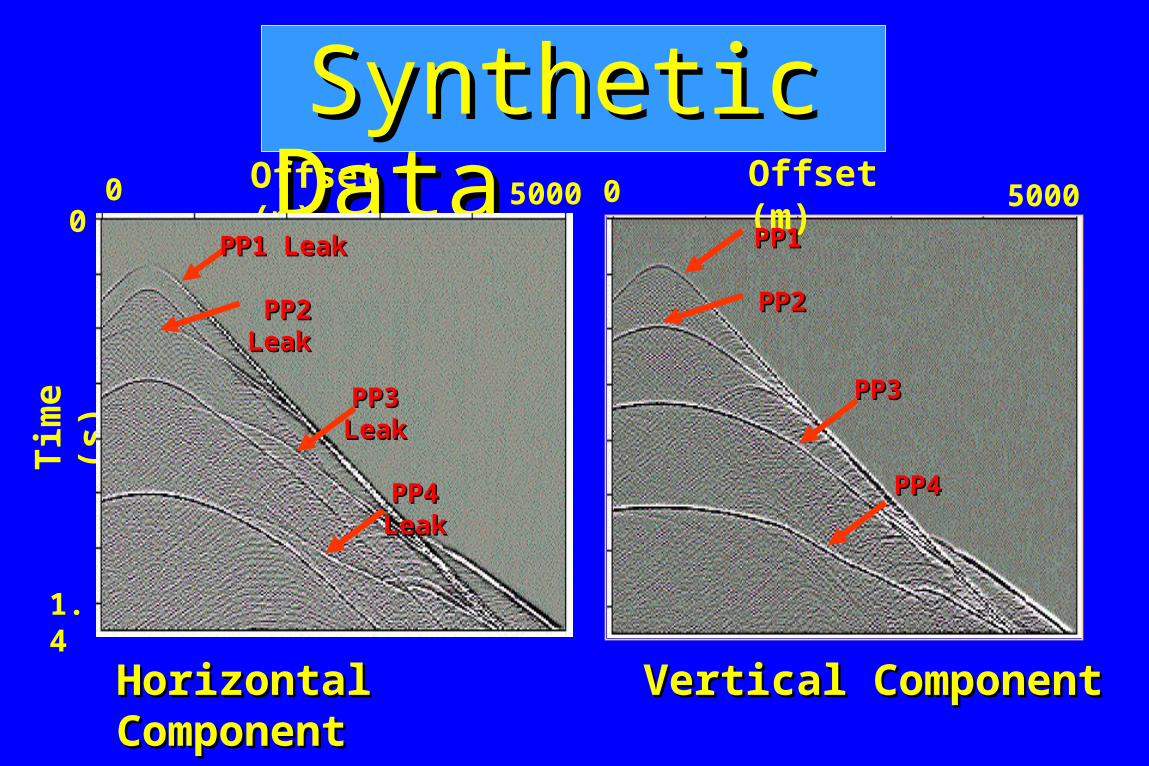
Synthetic DataSynthetic Data
1.4
0
Tim
e (s
)
0 Offset (m) 5000
0 Offset (m)5000
Horizontal ComponentHorizontal Component Vertical ComponentVertical Component
PP1 LeakPP1 Leak
PP2 PP2 LeakLeak
PP3 PP3 LeakLeak
PP4 PP4 LeakLeak
PP1PP1
PP2PP2
PP3PP3
PP4PP4
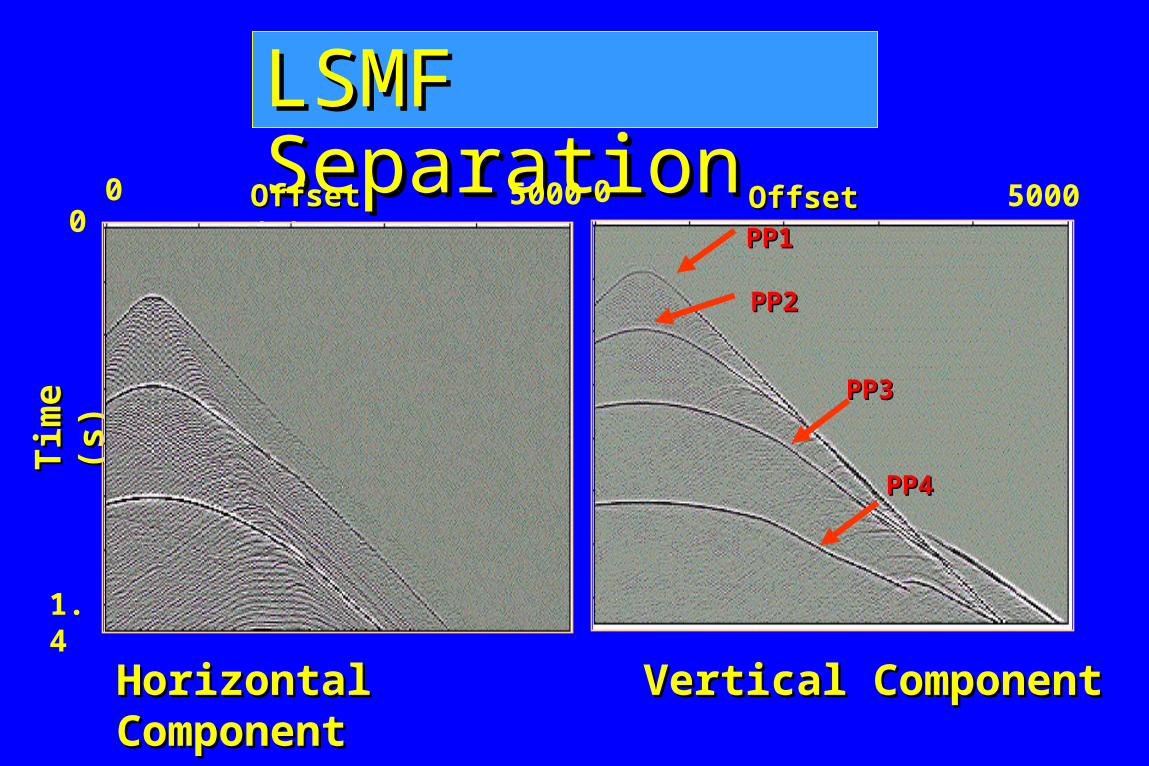
LSMF SeparationLSMF Separation
1.4
0
Tim
e (s
)T
ime
(s)
0
Offset (m)Offset (m) 5000
0
Offset (m)Offset (m) 5000
Horizontal ComponentHorizontal Component Vertical ComponentVertical Component
PP1PP1
PP2PP2
PP3PP3
PP4PP4
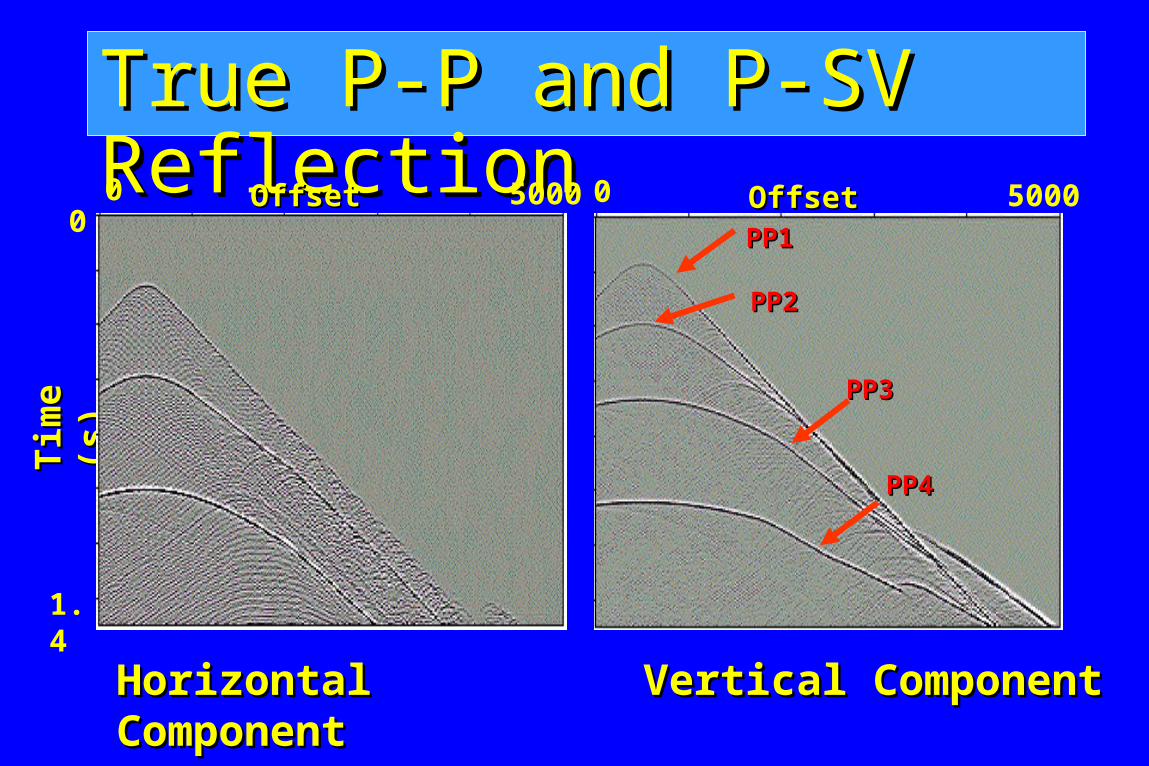
True P-P and P-SV ReflectionTrue P-P and P-SV Reflection
1.4
0
Tim
e (s
)T
ime
(s)
0
Offset (m)Offset (m) 5000
0
Offset (m)Offset (m) 5000
Horizontal ComponentHorizontal Component Vertical ComponentVertical Component
PP1PP1
PP2PP2
PP3PP3
PP4PP4
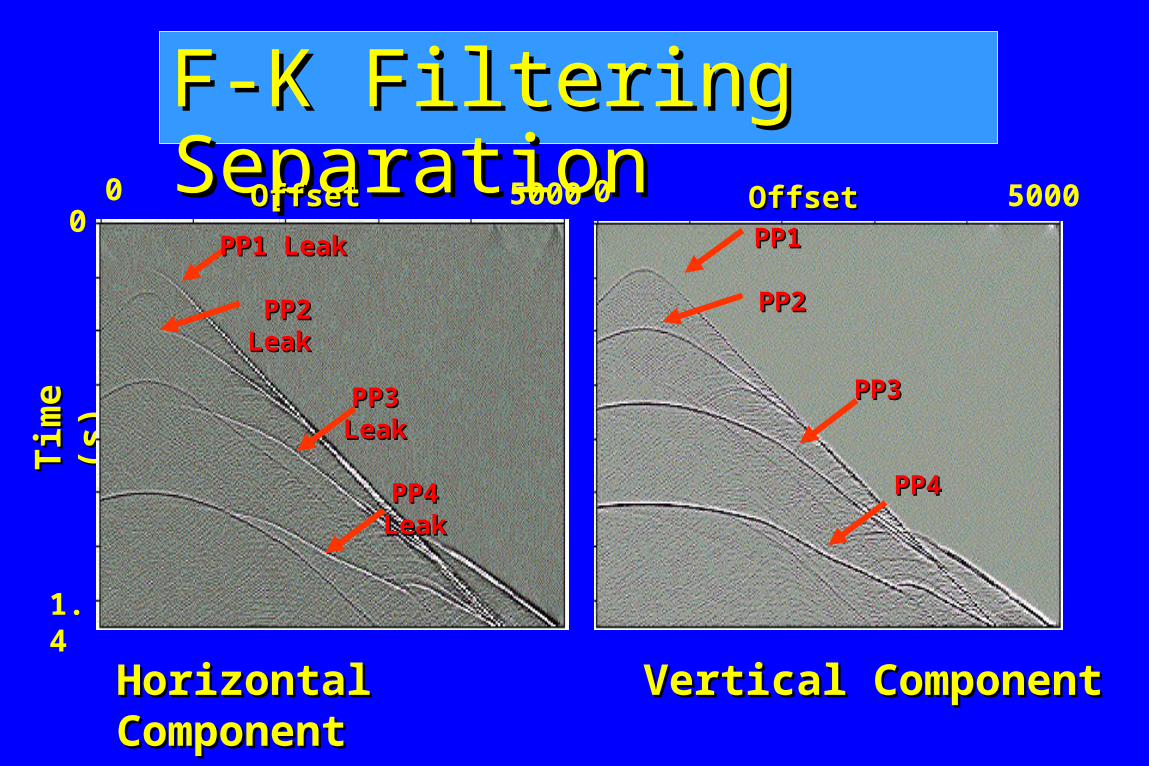
F-K Filtering SeparationF-K Filtering Separation
1.4
0
Tim
e (s
)T
ime
(s)
0
Offset (m)Offset (m) 5000
0
Offset (m)Offset (m) 5000
Horizontal ComponentHorizontal Component Vertical ComponentVertical Component
PP1PP1
PP2PP2
PP3PP3
PP4PP4
PP1 LeakPP1 Leak
PP2 PP2 LeakLeak
PP3 PP3 LeakLeak
PP4 PP4 LeakLeak
• Radon Filtering MethodsRadon Filtering Methods• ARCO/Saudi Field Data ResultsARCO/Saudi Field Data Results• Multicomponent Data ExampleMulticomponent Data Example Graben ExampleGraben Example
Mahagony Field DataMahagony Field Data
• Conclusion and DiscussionConclusion and Discussion
OutlineOutline
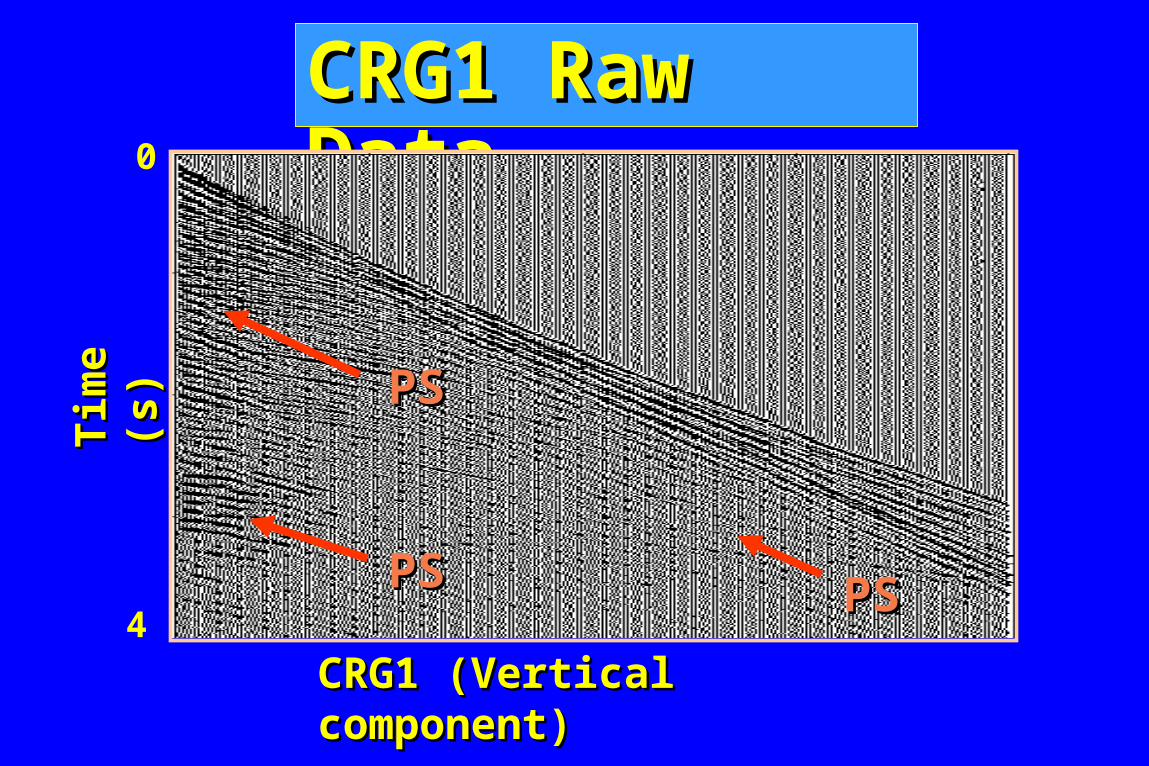
CRG1 Raw DataCRG1 Raw Data
CRG1 (Vertical component) CRG1 (Vertical component)
Tim
e (
s)T
ime
(s)
0
4PSPS PSPS
PSPS
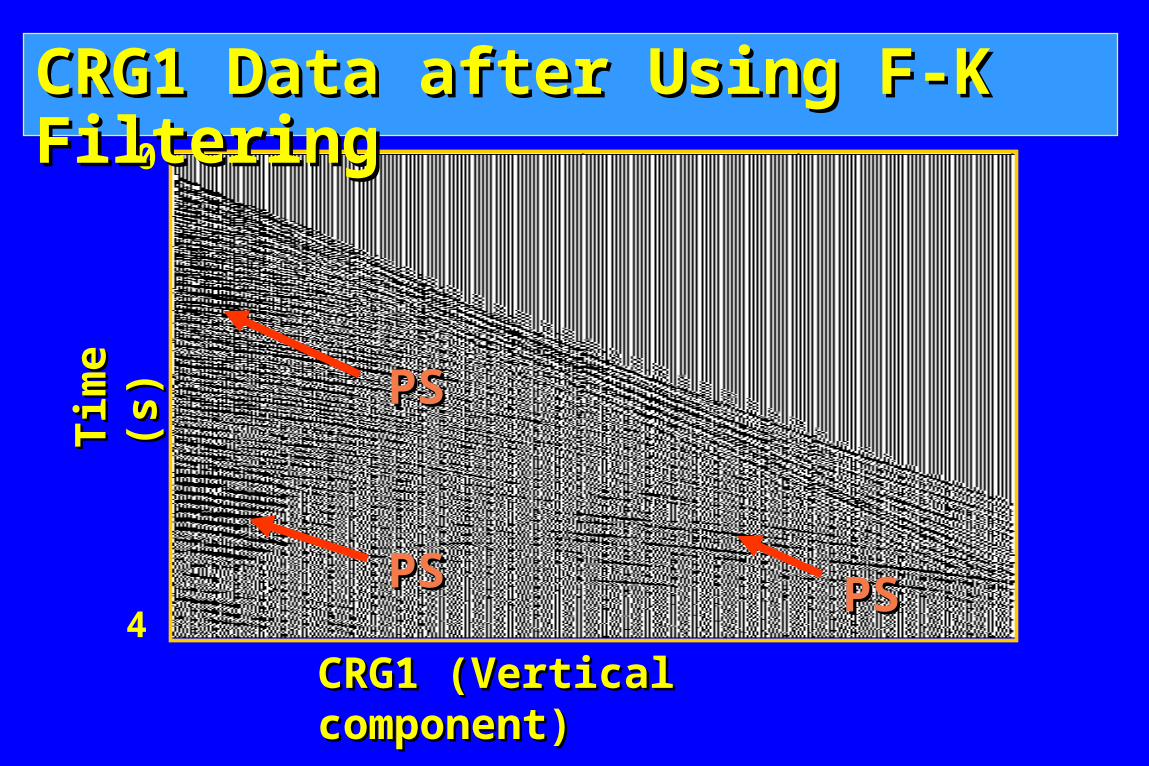
CRG1 (Vertical component) CRG1 (Vertical component)
Tim
e (
s)T
ime
(s)
0
4
CRG1 Data after Using F-K FilteringCRG1 Data after Using F-K Filtering
PSPS PSPS
PSPS
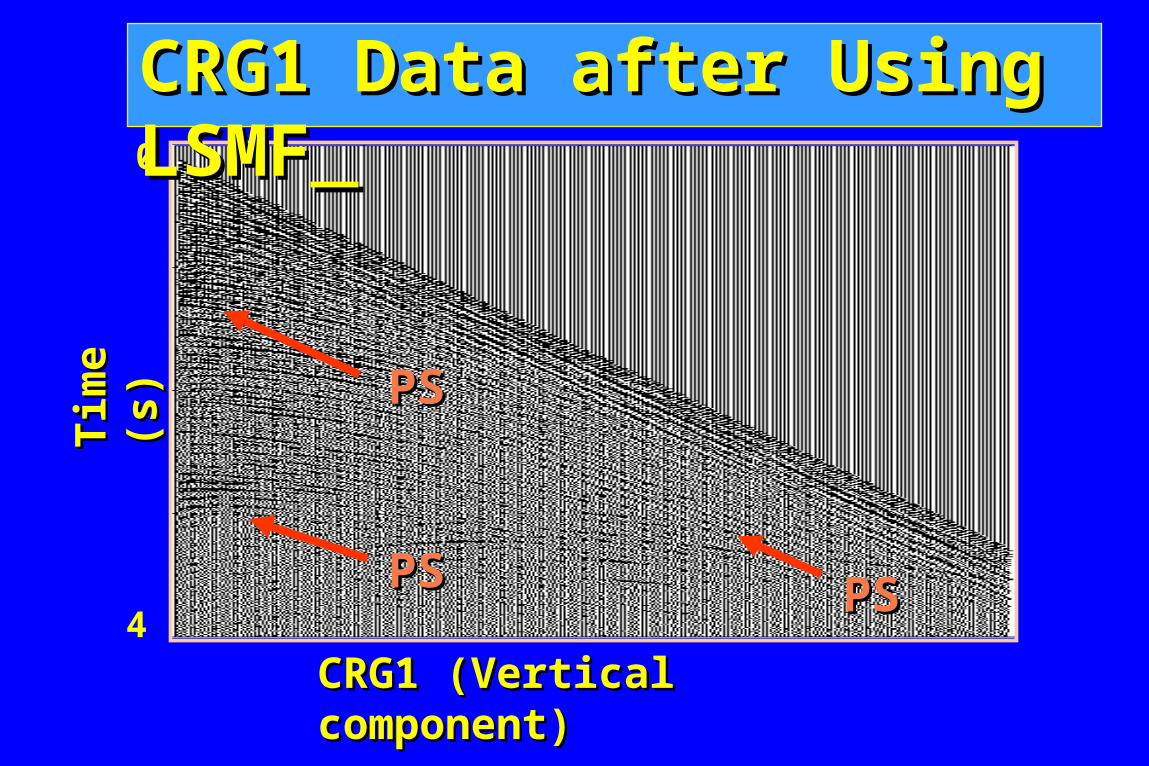
CRG1 (Vertical component) CRG1 (Vertical component)
Tim
e (
s)T
ime
(s)
0
4
CRG1 Data after Using LSMFCRG1 Data after Using LSMF
PSPS PSPS
PSPS
Local tau-p and adaptive subtractionLocal tau-p and adaptive subtraction
LSMF computes moveout and particleLSMF computes moveout and particle velocity direction based on true physics.velocity direction based on true physics.
Don’t use a shotgun to kill a flyDon’t use a shotgun to kill a fly
ConclusionsConclusions Filtering signal/noise using: moveoutFiltering signal/noise using: moveout difference & particle velocity directiondifference & particle velocity direction
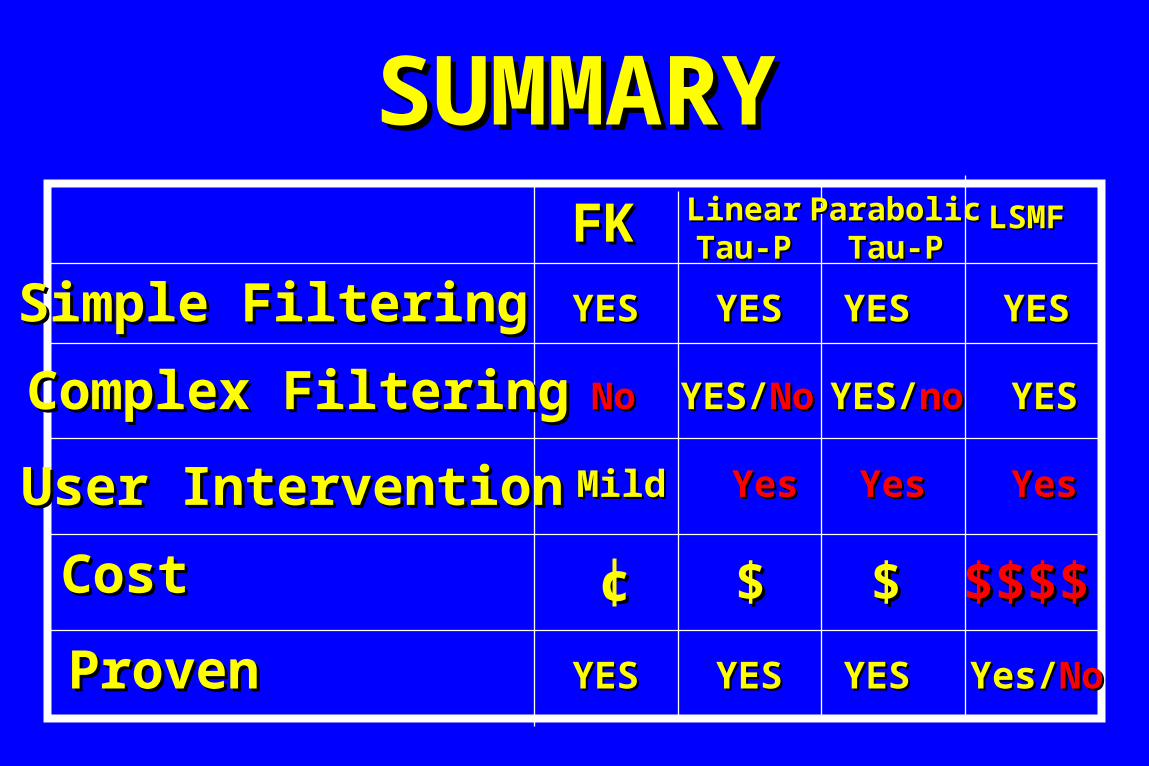
FKFK LinearLinearTau-PTau-P
ParabolicParabolicTau-PTau-P
LSMFLSMF
Simple FilteringSimple Filtering YESYES YESYES YESYES YESYES
Complex FilteringComplex Filtering NoNo YES/YES/NoNo YES/YES/nono YESYES
User InterventionUser Intervention YesYes YesYesMildMild YesYes
CostCost cc $$ $$ $$$$$$$$
ProvenProven YESYES YESYES YESYES Yes/Yes/NoNo
SUMMARYSUMMARY
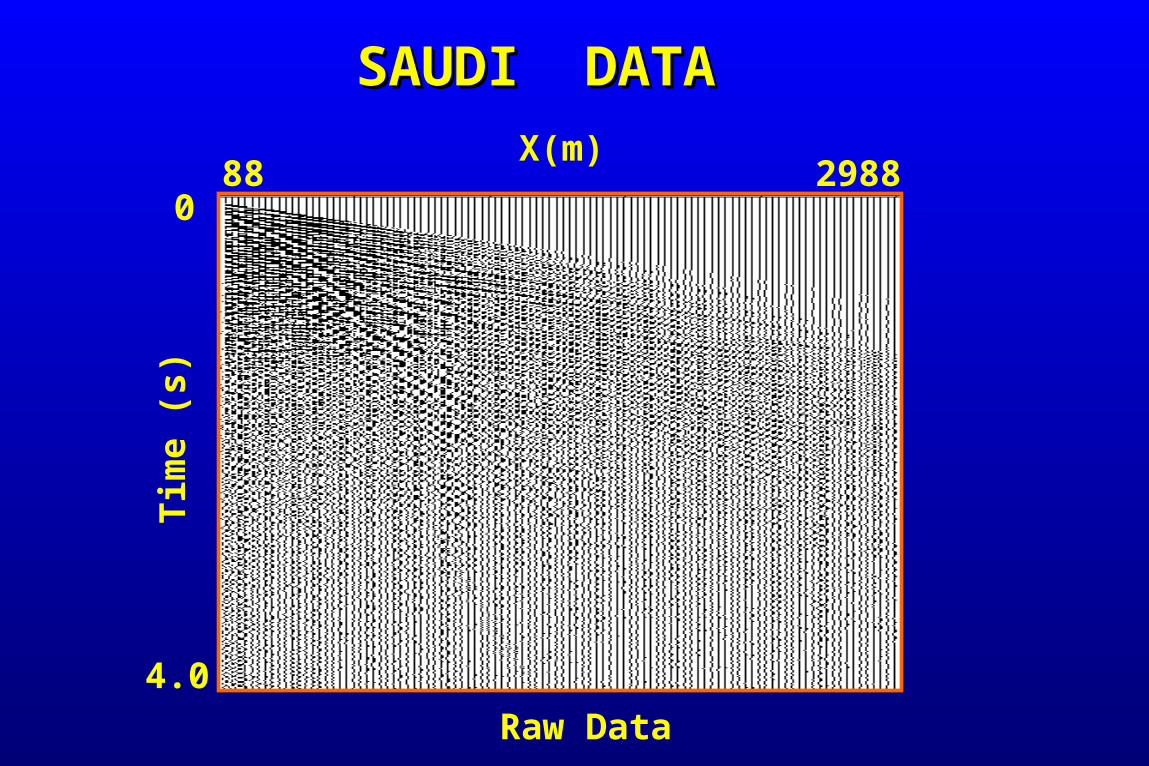
SAUDI DATASAUDI DATA
Tim
e (s
)0
4.0
88 2988X(m)
Raw Data
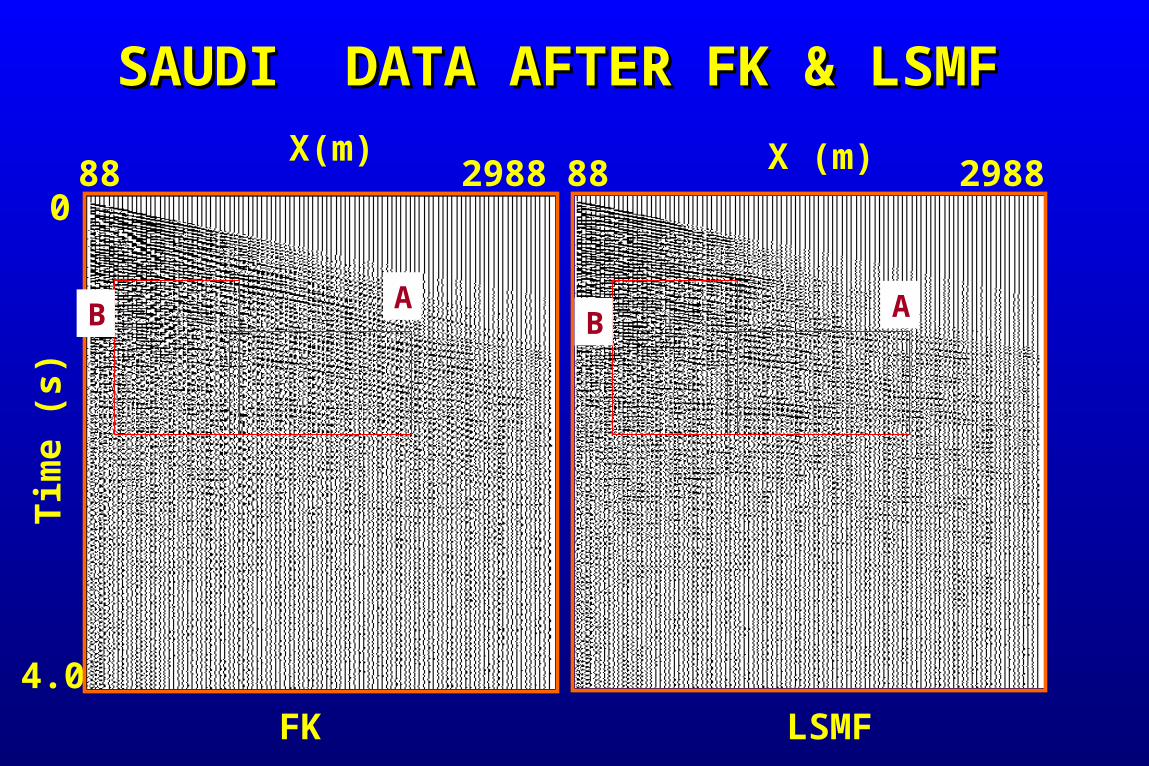
SAUDI DATA AFTER FK & LSMFSAUDI DATA AFTER FK & LSMFT
ime
(s)
0
4.0
88 2988X(m)
88 2988X (m)
FK LSMF
A AB B
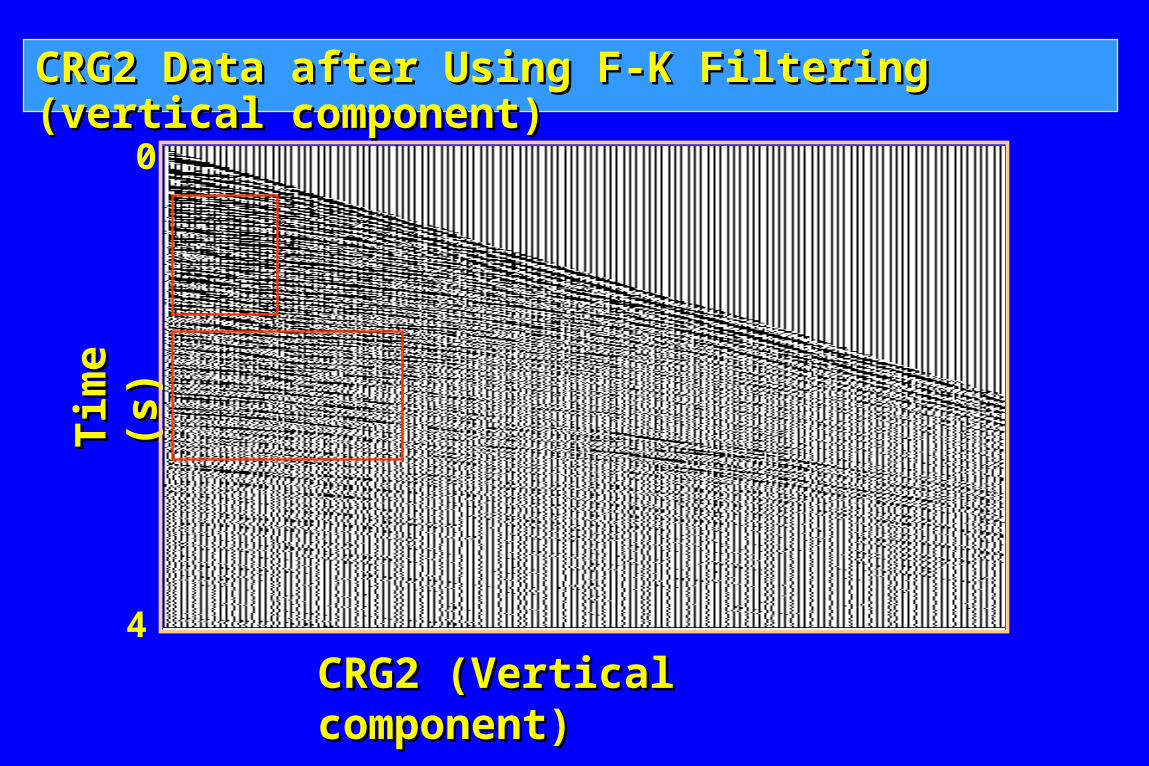
CRG2 (Vertical component) CRG2 (Vertical component)
Tim
e (
s)T
ime
(s)
0
4
CRG2 Data after Using F-K Filtering (vertical component)CRG2 Data after Using F-K Filtering (vertical component)
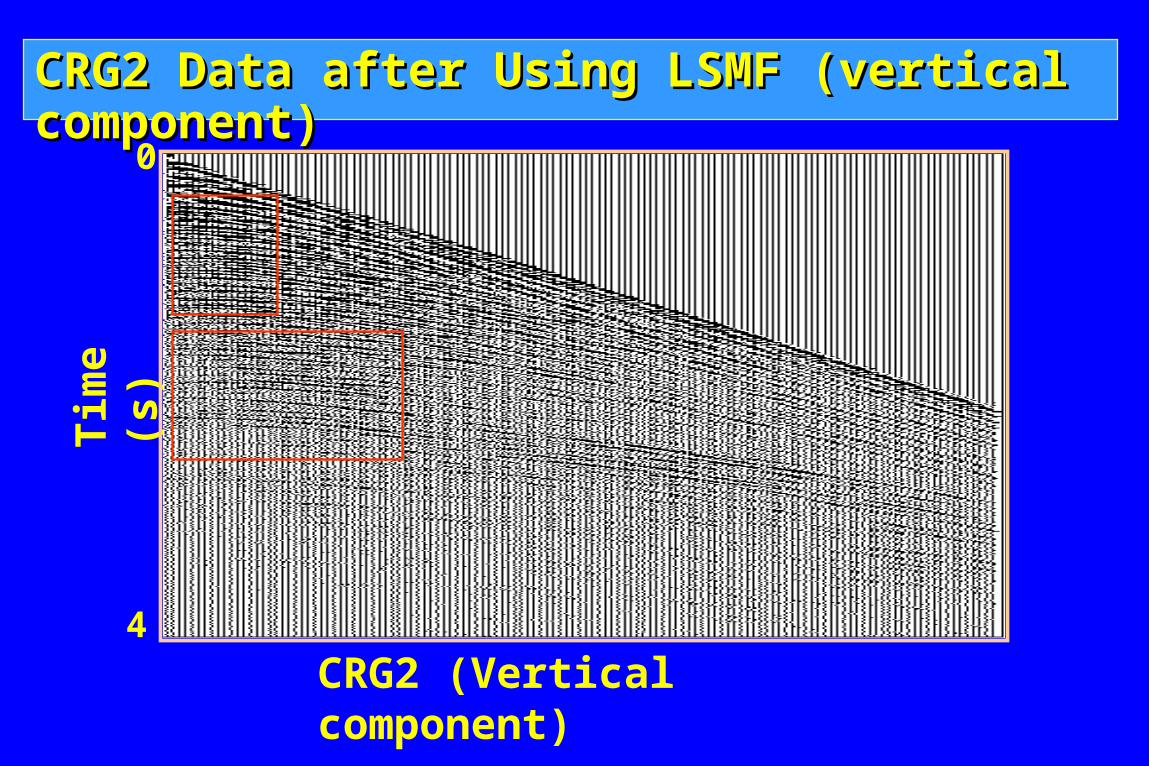
CRG2 (Vertical component)
Tim
e (
s)
0
4
CRG2 Data after Using LSMF (vertical component)CRG2 Data after Using LSMF (vertical component)
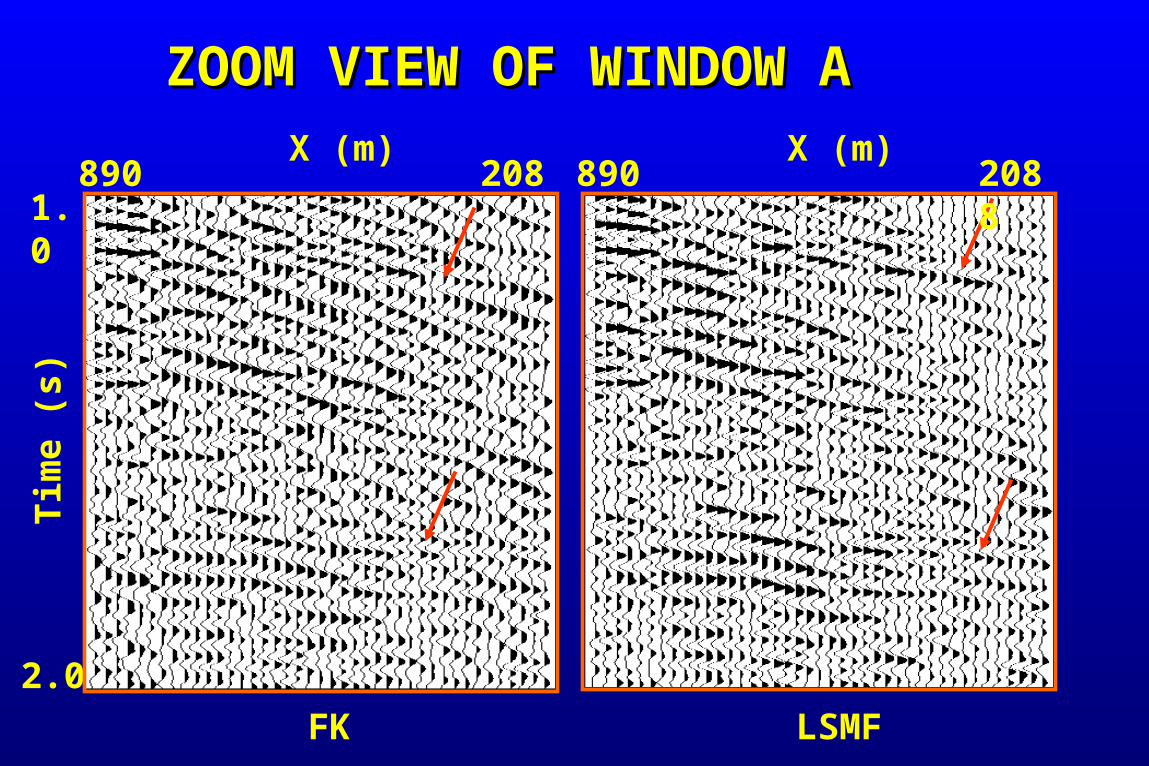
ZOOM VIEW OF WINDOW A ZOOM VIEW OF WINDOW A T
ime
(s)
1.0
2.0
890 2088X (m)
FK LSMF
890 2088X (m)
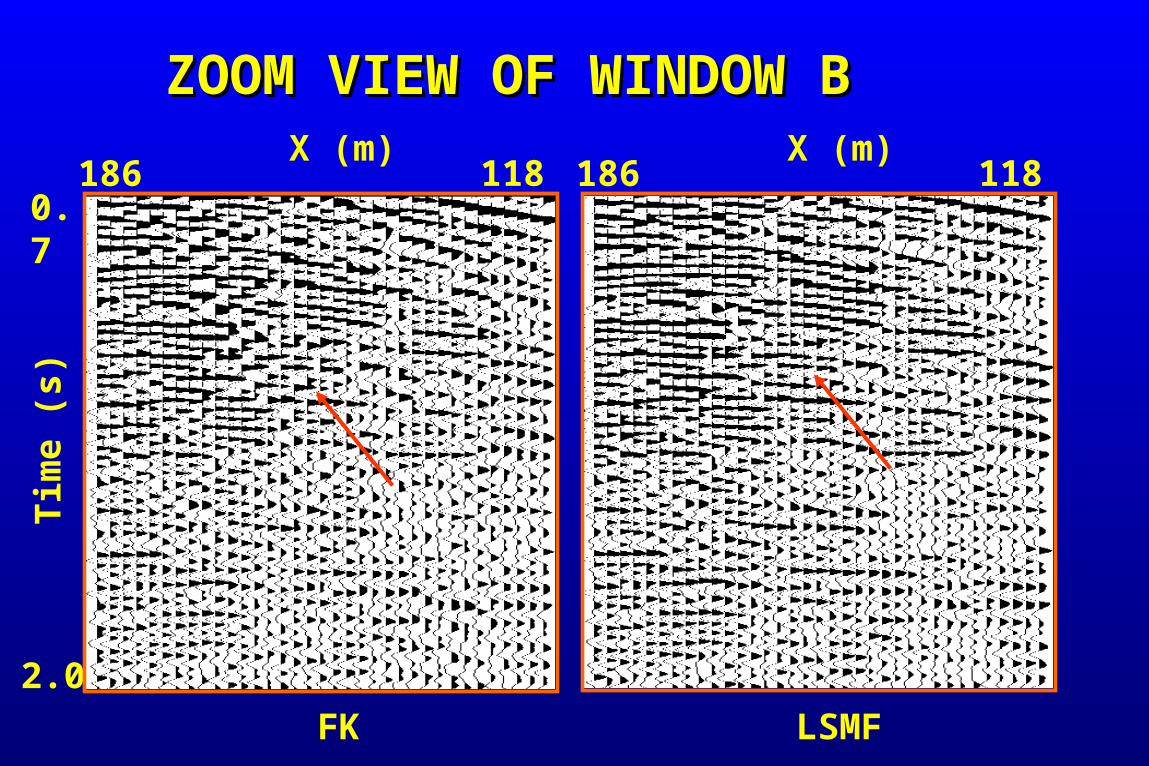
ZOOM VIEW OF WINDOW B ZOOM VIEW OF WINDOW B T
ime
(s)
0.7
2.0
186 1189X (m)
FK LSMF
186 1189X (m)
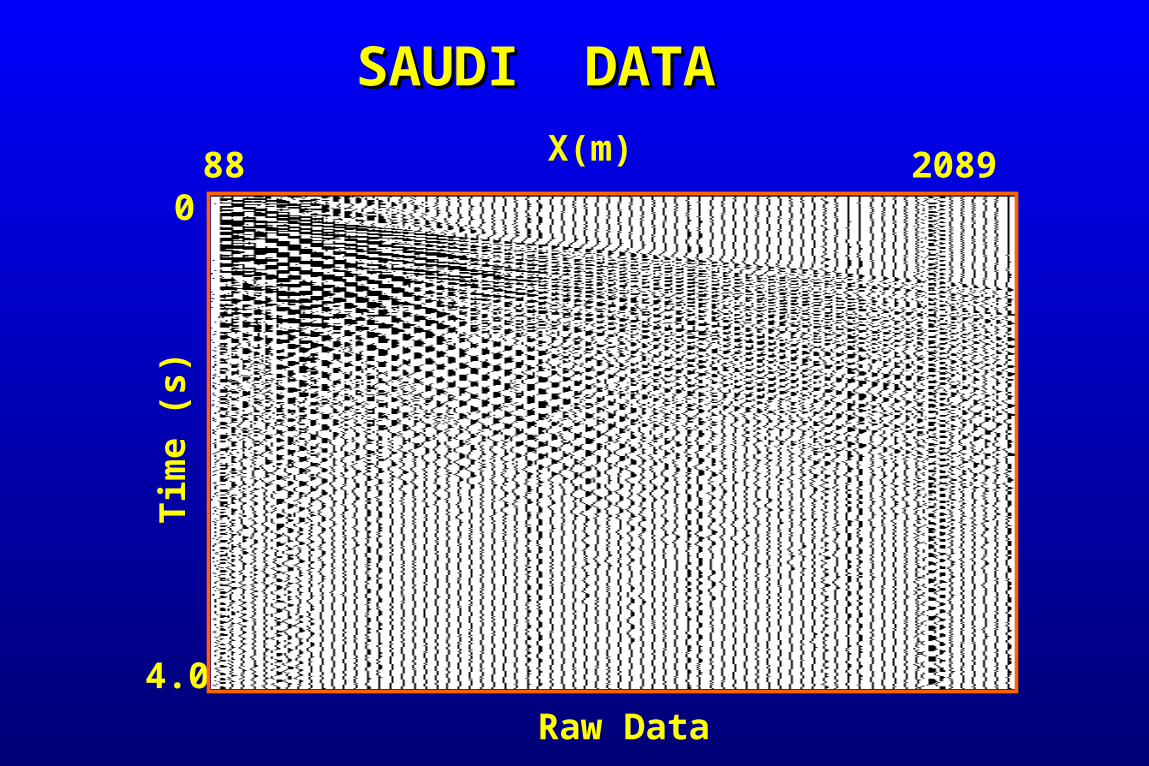
SAUDI DATASAUDI DATA
Tim
e (s
)0
4.0
88 2089X(m)
Raw Data
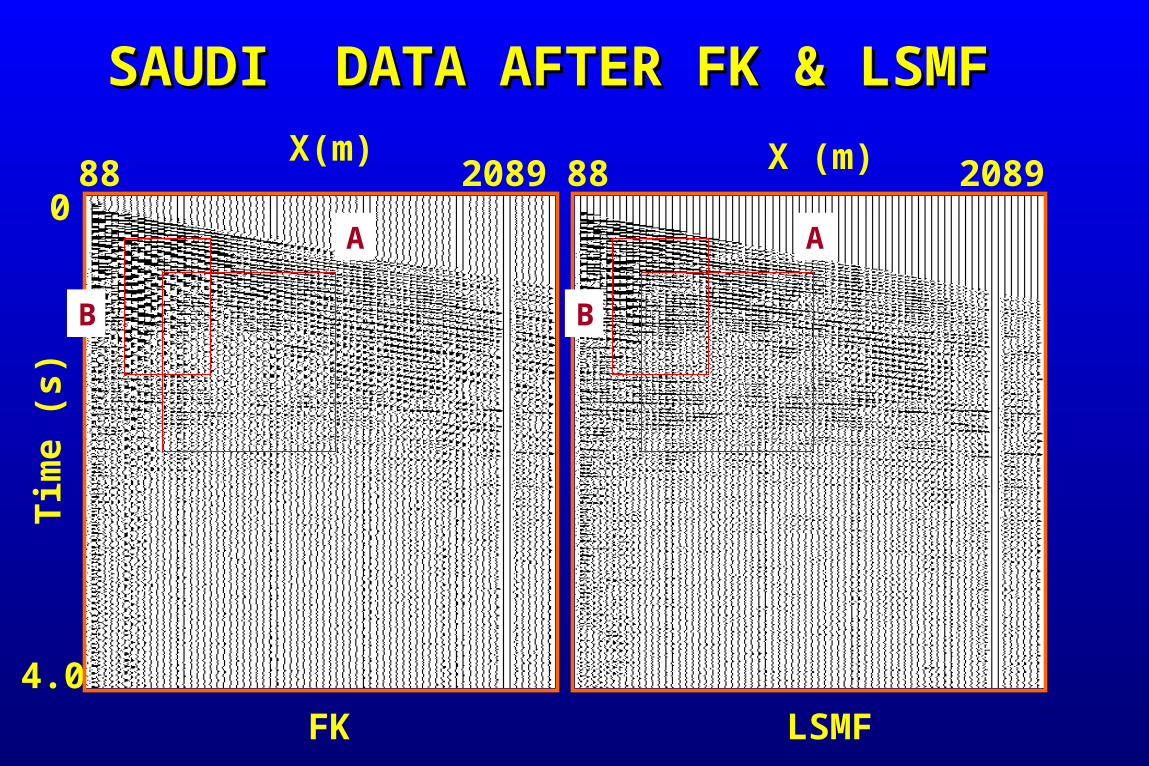
SAUDI DATA AFTER FK & LSMFSAUDI DATA AFTER FK & LSMFT
ime
(s)
0
4.0
88 2089X(m)
88 2089X (m)
FK LSMF
B B
A A
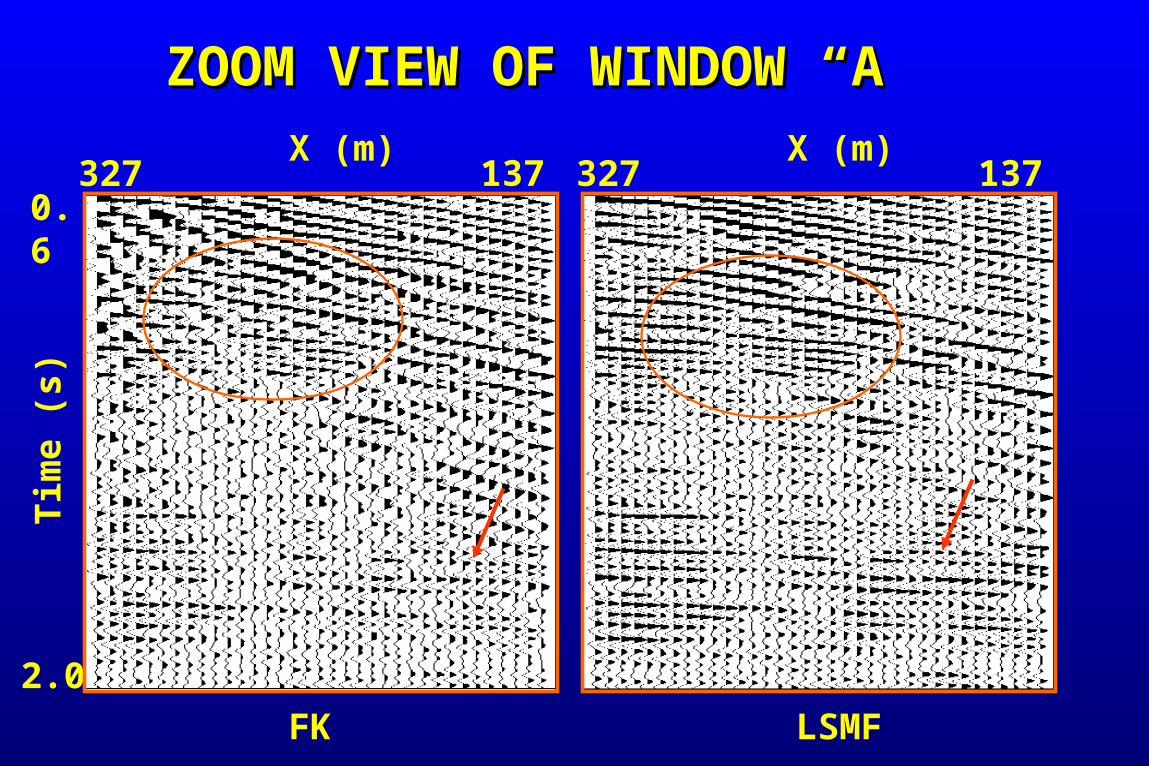
ZOOM VIEW OF WINDOW “A” ZOOM VIEW OF WINDOW “A” T
ime
(s)
0.6
2.0
327 1370X (m)
FK LSMF
327 1370X (m)
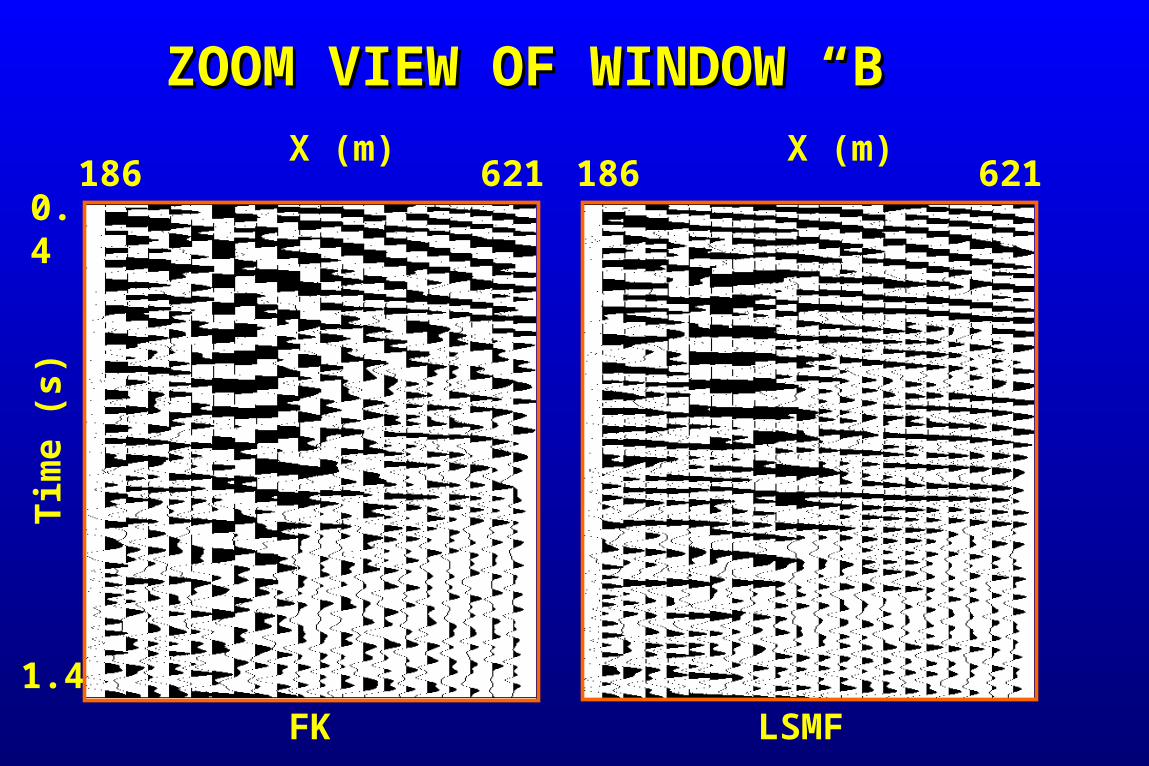
ZOOM VIEW OF WINDOW “B” ZOOM VIEW OF WINDOW “B” T
ime
(s)
0.4
1.4
186 621X (m)
FK LSMF
186 621X (m)
Overview of SomeOverview of Some Coherent Noise Coherent Noise Filtering MerthodsFiltering Merthods
OverviewOverviewThere are a number of different coherent noise filtering There are a number of different coherent noise filtering methods, including FK dip filter, Radon transform, methods, including FK dip filter, Radon transform, hyperbolic transform, and parabolic transform methods. hyperbolic transform, and parabolic transform methods. All of these methods rely upon transforming the signal All of these methods rely upon transforming the signal into a new domain where the signal and noise are more into a new domain where the signal and noise are more separable. We will show that LSM filtering is another separable. We will show that LSM filtering is another coherent filtering method, but is more precise in defining coherent filtering method, but is more precise in defining a transform that separates signal and coherent noise a transform that separates signal and coherent noise according to the physics of wave propagation. Examples according to the physics of wave propagation. Examples show that this is sometimes a more effective ilter, but it is show that this is sometimes a more effective ilter, but it is more costly.more costly.
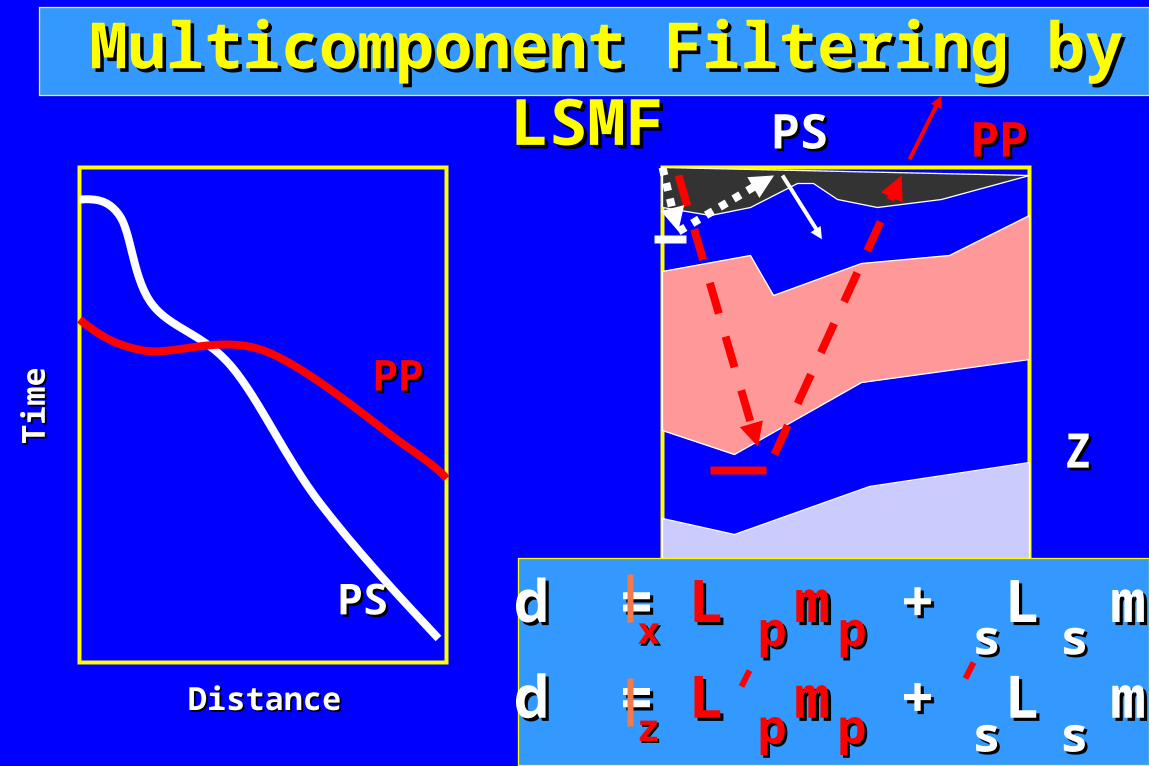
DistanceDistance
Tim
eT
ime
PSPS
PPPP
Multicomponent Filtering by LSMF Multicomponent Filtering by LSMF
ZZ
PPPPPSPS
ssssd =d = L m L m ++ L mL mpp ppxx
ssssd =d = L m L m ++ L mL m
pp ppzz
Signal FK
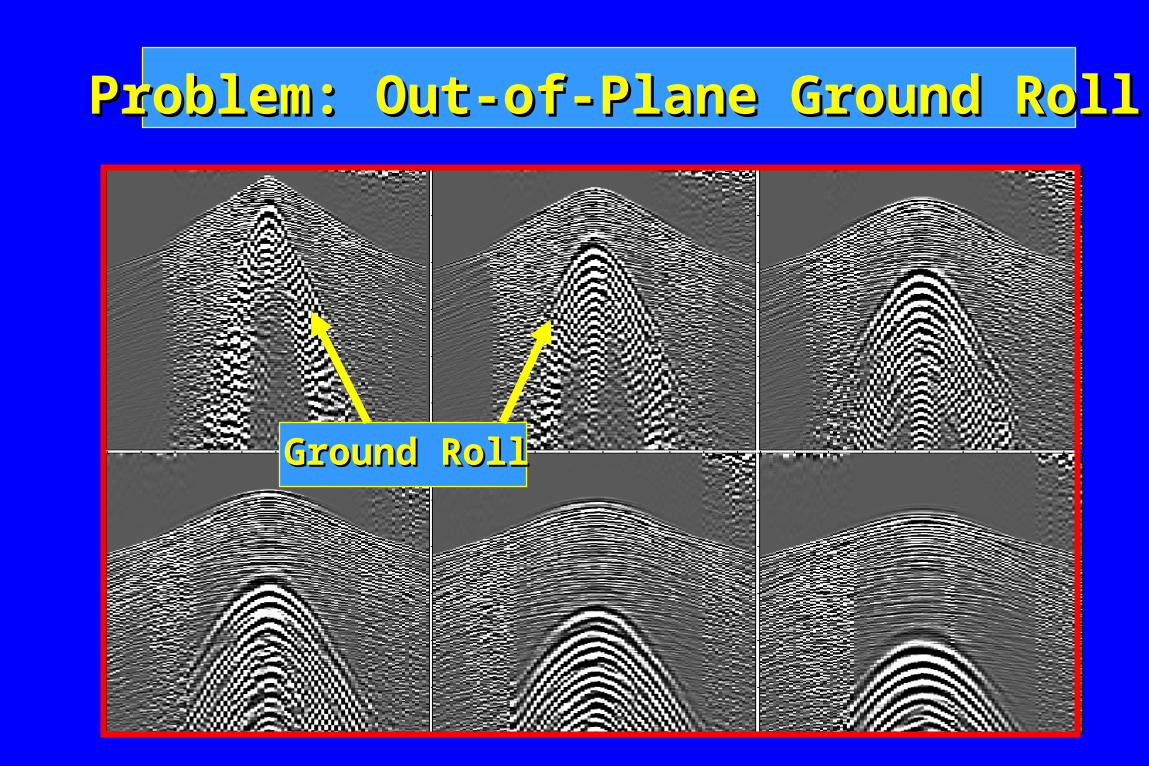
Problem: Out-of-Plane Ground RollProblem: Out-of-Plane Ground Roll
Ground RollGround Roll
DistanceDistance
Tim
eT
ime
PSPS
PPPP
Filtering by LSMF Filtering by LSMF
MM11MM22
ZZ
XX
LL-1-1pp
LL-1-1
ss
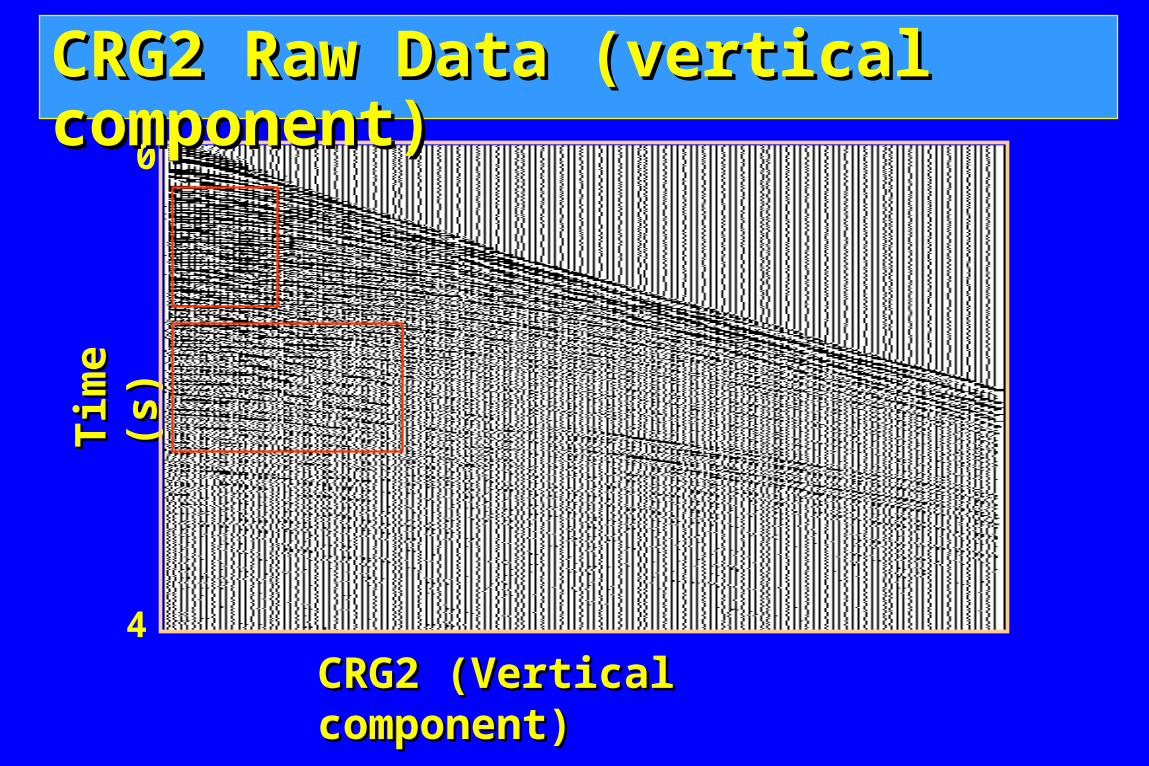
CRG2 (Vertical component) CRG2 (Vertical component)
Tim
e (
s)T
ime
(s)
0
4
CRG2 Raw Data (vertical component)CRG2 Raw Data (vertical component)
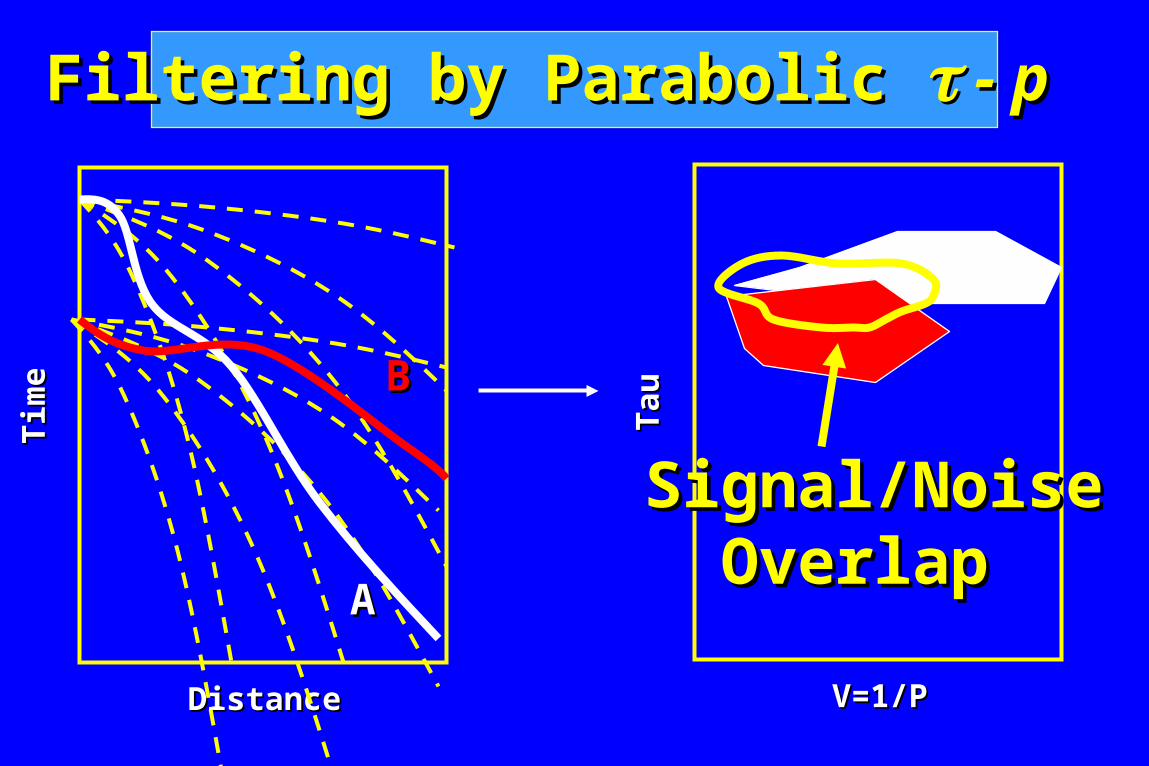
DistanceDistance
Tim
eT
ime
AA
BB
V=1/PV=1/P
Tau
Tau
Filtering by Parabolic Filtering by Parabolic - p - p
Signal/NoiseSignal/NoiseOverlap Overlap
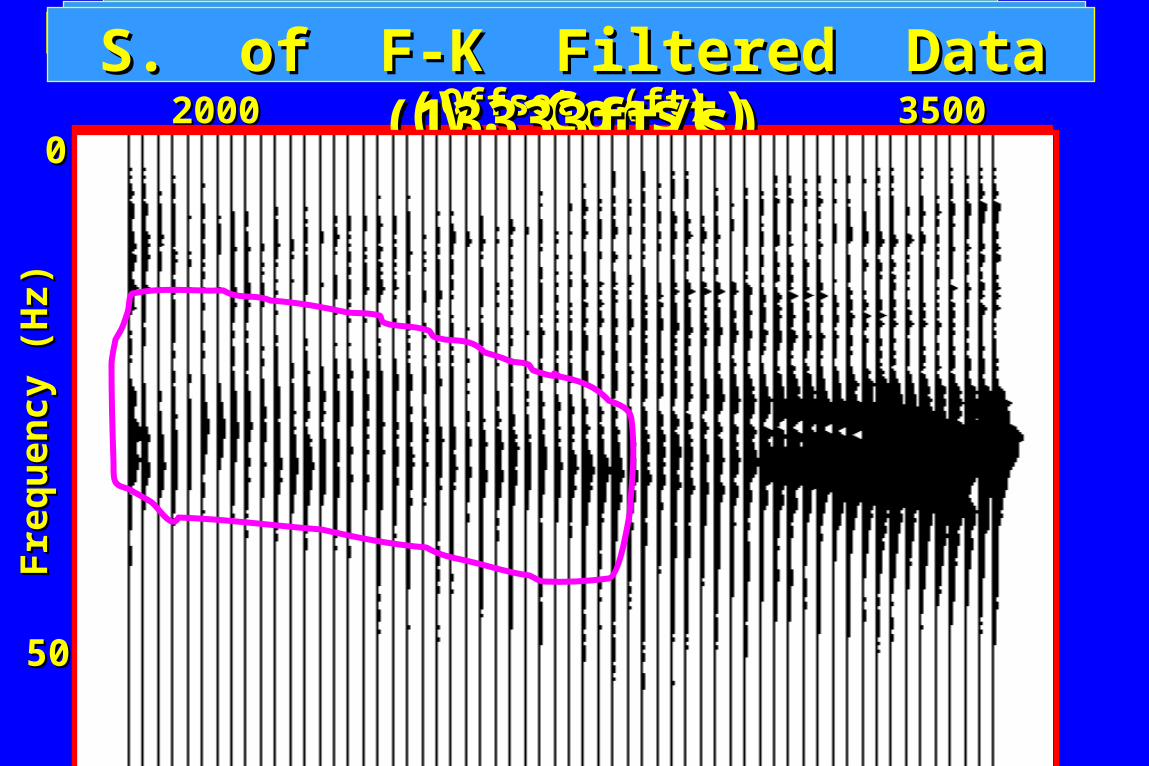
F-X Spectrum of ARCO DataF-X Spectrum of ARCO DataOffset (ft)Offset (ft)
Fre
qu
ency
(H
z)F
req
uen
cy (
Hz)
003500350020002000
5050
S. of LSM Filtered Data (V. S. of LSM Filtered Data (V. Const)Const)
S. of F-K Filtered Data (13333ft/s)S. of F-K Filtered Data (13333ft/s)
SummarySummary
TraditionalTraditional coherent filtering based on coherent filtering based on approximate moveoutapproximate moveout
LSMF filtering operators based onLSMF filtering operators based on actual physics separating actual physics separating signalsignal & & noisenoise
Better physics --> Better focusing, more $$$Better physics --> Better focusing, more $$$

![Scene-Independent Group Profiling in Crowd › ~xgwang › papers › shaoCWcvpr14.pdftion through tracklet clustering. Zhou et al. [39] present the Coherent Filtering (CF) approach](https://img.pdfslide.net/doc/110x75/5f24b631e326581913498718/scene-independent-group-proiling-in-a-xgwang-a-papers-a-shaocwcvpr14pdf.jpg)



























