Embed Size (px)
Citation preview

7/28/2019 Paper 24-A Posteriori Error Estimator for Mixed Approximation of the Navier-Stokes Equations With the C a b c Bo…
http://slidepdf.com/reader/full/paper-24-a-posteriori-error-estimator-for-mixed-approximation-of-the-navier-stokes 1/11
(IJACSA) International Journal of Advanced Computer Science and Applications,Vol. 4, No.3, 2013
145 | P a g e
www.ijacsa.thesai.org
A Posteriori Error Estimator for Mixed
Approximation of the Navier-Stokes Equations with
the cbaC ,, Boundary Condition
J. EL Mekkaoui, M A. Bennani, A.Elkhalfi
Mechanical engineering laboratoryFaculty of sciences and techniques-B.P. 2202 Route Imouzzer
Fes
A. Elakkad
Department of mathematicsRegional Centre for Professions of Education and Training,
Fes, B.P: 243 Sefrou Morocco
Abstract — In this paper, we introduce the Navier-Stokesequations with a new boundary condition. In this context, weshow the existence and uniqueness of the solution of the weak formulation associated with the proposed problem. To solve this
latter, we use the discretization by mixed finite element method.In addition, two types of a posteriori error indicator are
introduced and are shown to give global error estimates that areequivalent to the true error. In order to evaluate the performanceof the method, the numerical results are compared with some
previously published works and with others coming fromcommercial code like ADINA system.
Keywords — Navier-Stokes Equations;cbaC ,,
boundary
condition; Mixed Finite element method; Residual Error Estimator;
I. I NTRODUCTION
This paper describes a numerical solutions of Navier-stoksequations with a new boundary condition generalizes the willknown basis conditions, especially the Dirichlet and the
Neumann conditions. So, we prove that the weak formulation
of the proposed modelling has an unique solution. To calculatethis latter, we use the discretization by mixed finite elementmethod. Moreover, we propose two types of a posteriori error indicator which are shown to give global error estimates thatare equivalent to the true error. To compare our solution withthe some previously ones, as ADINA system, some numericalresults are shown. This method is structured as a standalone
package for studying discretization algorithms for PDEs andfor exploring and developing algorithms in numerical linear and nonlinear algebra for solving the associated discretesystems. It can also be used as a pedagogical tool for studyingthese issues, or more elementary ones such as the properties of Krylov subspace iterative methods [15].
The latter two PDEs constitute the basis for computationalmodeling of the flow of an incompressible Newtonian fluid.For the equations, we offer a choice of two-dimensionaldomains on which the problem can be posed, along with
boundary conditions and other aspects of the problem, and achoice of finite element discretizations on a quadrilateralelement mesh.
Whereas the discrete Navier-Stokes equations require amethod such as the generalized minimum residual method(GMRES), which is designed for non symmetric systems [15].
The key for fast solution lies in the choice of effective preconditioning strategies. The package offers a range of options, including algebraic methods such as incomplete LUfactorizations, as well as more sophisticated and state-of-the-art multigrid methods designed to take advantage of thestructure of the discrete linearized Navier-Stokes equations. In
addition, there is a choice of iterative strategies, Picarditeration or Newton’s method, for solving the nonlinear algebraic systems arising from the latter problem.
A posteriori error analysis in problems related to fluiddynamics is a subject that has received a lot of attention duringthe last decades. In the conforming case there are several waysto define error estimators by using the residual equation. in
particular, for the Stokes problem, M. Ainsworth, J. Oden[10], C.Carstensen, S.A. Funken [12], D.Kay, D.Silvester [13]and R.Verfurth [14], introduced several error estimators and
provided that that they are equivalent to the energy norm of the errors. Other works for the stationary Navier-Stokes
problem have been introduced in [5, 8, 15, 16].
The plan of the paper is as follows. Section I I presents themodel problem used in this paper. The weak formulation is
presented in section III . In section IV, we show the existenceand uniqueness of the solution.
The discretization by mixed finite elements is described insection V. Section VI introduced two types of a posteriorierror bounds of the computed solution. Numerical experimentscarried out within the framework of this publication and their
comparisons with other results are shown in Section VII.
II. GOVERNING EQUATIONS
We will consider the model of viscous incompressible flow
in an idealized, bounded, connected domain in .
2
IR
,in.2 f puuu
(1)
,in0. u
(2)
.on g Auu pI nT T
(3)
We also assume that has a polygonal boundary
: , so n
that is the usual outward-pointing normal.

7/28/2019 Paper 24-A Posteriori Error Estimator for Mixed Approximation of the Navier-Stokes Equations With the C a b c Bo…
http://slidepdf.com/reader/full/paper-24-a-posteriori-error-estimator-for-mixed-approximation-of-the-navier-stokes 2/11
(IJACSA) International Journal of Advanced Computer Science and Applications,Vol. 4, No.3, 2013
146 | P a g e
www.ijacsa.thesai.org
The vector field u
is the velocity of the flow and the scalar variable p represents the pressure.
Our mathematical model is the Navier-stoks system with a
new boundary condition (3) noted .,, cbaC where 0 a
given constant is called the kinematic viscosity, is the
gradient, . is the divergence and2 is the Laplacien
operator, ),(2 L f
)(2 L g
and A is a real matrixdefined as
),( ),(
),( ),(),(
y xb y xc
y xc y xa y x A ),( y xall for (4)
There are two strictly positive constants ,and 11 such
that:
11 ),( X y x A X T
(5)
),( y xall for and
.1/2
2 X IR X S X Where areand , cba
the function continuous defined on .
III. THE WEAK FORMULATION
We define the following spaces:
)(;;/:)(
21 L
y
u
x
uu IRuh (6)
211)()( h H (7)
,0 /)()(22
0 q Lq L (8)
,0./)()(11
0, in Γ nv H v H n
(9)
.in0../)()(1
0,
1
0, v H vV nn
(10)
The standard weak formulation of the Navier-Stokes flow problem (1) - (2)-(3) is the following:
Find)(
1 H u
and)(
2 L psuch that
,0.
,
.:
dsuq
v g v f
v pv AuvuuvuT
(11)
.)()(,2
0
1
0, L H qvall for n
Let the bilinear forms
IR L H B IR H H A nnn )()(: ;)()(:2
0
1
0,
1
0,
1
0,
.)()(: 20
20 IR L Ld
:),( v Auvuvu AT
(12)
.),(
uqqu B
(13)
.),( q pq pd (14)
And the tri-linear forms
IR H H H D IR H H H C nnnnnn 1
0,
1
0,
1
0,
1
0,
1
0,
1
0, : ;:
)(),,( z vu z vuC
(15)
),,(),(),,( z vuC vu A z vu D
(16)
Given the functional IR L )(:L2
0
v f v g v L
..)( (17)
The underlying weak formulation (11) may be restated as:
such that)()(,2
0
1
0, L H pu find n
0),(
)(),(),,(),(
qu B
v Lqv BvuuC vu A
(18)
.)()(,
2
0
1
0, L H qvall for n
In the sequel we can assume that .0
g
IV. THE EXISTENCE AND UNIQUENESS OF THE SOLUTION
In this section we will study the existence and uniquenessof the solution of problem (18), for that we need the followingresults.
Theorem 4.1. There are two strictly positive constants 1c and
2c such that:
,12,,11c vcvv J
)(1
0,
n H vall for
(19)
with
: 2
1
, v Avvvv
T
J
(20)
2
12
,0
2
,1,1
vvv
(21)
Proof. 1) The mapping )()(:
21
0 L H iscontinuous
(See [6] theorem 1, 2), then there exists :such that 0c
).(allfor 1
,1,0
H vvcv
Using (5) gives,
,2
,01
2
,01 vv Avv
T (22)
then ),(allfor 1
1,2,
H vvcv
J
.with 2
12
12 cc
On the other hand. According to 5.55 in [1], there exists a
constant 0 such that ).(2
,0
2
,0
2
,0
vvv
Using (22), gives
),(allfor c1
J,,11
H vvv
.;max and1
with 1
2
1
1
1
C C
c
).(allfor c Finally,1
,12,,11
H vvcvv J

7/28/2019 Paper 24-A Posteriori Error Estimator for Mixed Approximation of the Navier-Stokes Equations With the C a b c Bo…
http://slidepdf.com/reader/full/paper-24-a-posteriori-error-estimator-for-mixed-approximation-of-the-navier-stokes 3/11
(IJACSA) International Journal of Advanced Computer Science and Applications,Vol. 4, No.3, 2013
147 | P a g e
www.ijacsa.thesai.org
This result allows us to prove that ).),((,
1
0,
J n H is a
Hilbert space which is obliged condition for to obtain theexistence and uniqueness of the solution.
Theorem 4.2.spaceHilbertrealais ).),((
,
1
0,
J n H .
Proof. ).),((,1
1
H is a real space and )(
1
0, n H is
closed in )(1 H and .,1
and ., J
are equivalent
norms, then ).),((,
1
0,
J n H is a real Hilbert space for two
norms.
Theorem 4.3
)1
,,
),( J J
vuvu A
(23)
)()(, 10,
10, nn H H vuall for
,
1
0, .normfor the elliptic-)(is 2) J n H A and
),(2
J, vvv A
(24)
).( 1
0, n H vall for
.
Proof: it is easy. Theorem 4.4
1) ,2
,,,0
J
vqqv B
(25)
)()(, allfor 2
0
1
0, L H qv n
2) The bilinear form b is satisfies the inf-sup: There exists a
constant 0 such that
)( ),(
sup2
0,0
,)(
10,
Lqall for qv
qv B
J H v n
(26)
Proof.
1) Let ),()(,2
0
1
0, L H qv n
we have
.2
2
.,
,,0
,0,0
,0,0
J vq
vq
vqqv B
),(Let2)2
0 Lq we have
),[6](see'
),(sup
,0
,1)(
10
qv
qv B
H v
.'
),(sup
),(sup
),(sup
)(allfor and
)( 0/)()(
since
,0
,1)(
,1)(
,1)(
1
0,1,1
1
0,
11
0
10
10
10,
q
v
qv B
v
qv B
v
qv B
H vvv
H inv H v H
H v
H v H v
n
n
Using (19) gives
.c
'with,
),(sup
2,0
,)(
10,
qv
qv B
J H v n
Theorem 4.5 1) There exists a constant such that0m
(27) ,,,,,
J J J
z vum z vuC
1
0,
1
0,
1
0,,, nnn H H H z vuall for
. (28) ,,,,)2 v z uC z vuC
.,, 10,
10,
10, nnn V V V z vuall for
3) (29) 0,, uuvC
., 10,
10, nn V V vuall for
4) (30) ,,,2
J, vvv Avvw D
imply)(as)(inweakly)5 0, mV uu nm
(31) ),,(),,(that vuu Dvuu D mm
Proof
havewe),(,,zLet1) 1
0, n H vu
'
[6])in(see',,
,,,3
1
,1,1,1
J J J z vu
c
m
z vum z vuC
havewe),(,,zLet2)1
0, nV vu
).(.
)...(,,,,
vu z
uvvu z uv z C vu z C
By Green formula, we have
.,,,,finally
,0 and0.then)( Since
)..().)(.(,,,,
0,
uv z C vu z C
z divn z V z
vu z divvun z uv z C vu z C
n
3) It’s easy, just take (28).inuv
4) It’ suffices to apply (29).
5) The same proof of V.Girault and P.A. Raviart in [6] page
115.According the theorems 1.2 and 1.4, chapter IV in [6], the
results (18)-(30) ensure the existence at least one pair
)()(, 20
10, L H pu n
satisfies (18).
We define
,,,
,,
,,sup
10, J J J
H z vu z vu
z vuC N
n
(32)
.sup
,0,
J V v v
v f f
n
(33)
Then a well-know (sufficient) condition for uniqueness is
that forcing function is small in the sense that 1
N f
(it
suffices to apply theorems 1.3 and 1.4 chapter IV in [6]).

7/28/2019 Paper 24-A Posteriori Error Estimator for Mixed Approximation of the Navier-Stokes Equations With the C a b c Bo…
http://slidepdf.com/reader/full/paper-24-a-posteriori-error-estimator-for-mixed-approximation-of-the-navier-stokes 4/11
(IJACSA) International Journal of Advanced Computer Science and Applications,Vol. 4, No.3, 2013
148 | P a g e
www.ijacsa.thesai.org
Theorem 4.6. Assume that ν and )(2 L f
satisfy the
following condition
(34) )(allfor .1
0,,
n J H vv
N v f
[0,1[.number fixedsomeFor
Then there exists an unique )()(, 20
10, L H pu n
satisfies (18), and holds
. , N
u J
(35)
Proof. The some proof of theorem 2.4 chapter IV in [6].
V. MIXED FINITE ELEMENT APPROXIMATION
In this section we assume that cba f and ,,
are the
polynomials.
Let ,0; hT h be a family of rectangulations of . For
any ,hT T T is of rectangles sharing at least one edge
with element T,T
~ is the set of rectangles sharing at least one
vertex with T. Also, for an element edge E, E denotes the
union of rectangles sharing E, while E ~ is the set of rectangles
sharing at least one vertex whit E.
Next, T is the set of the four edges of T we denote by
)(T andT N the set of its edges and vertices, respectively.
We let )(T hT T h denotes the set of all edges
split into interior and boundary edges.
,, hhh
Where E E hh :,
E E hh :, We denote by
T h the diameter of a simplex, byT h the
diameter of a face E of T, and we set T T T
hhh max .
A discrete weak formulation is defined using finite
dimensional spaces )(X 10,
1h n
H and )(M 20
h L
The discrete version of (15) is:
0,
)(,,,,
:such thatand 1
hh
hhhhhhhh
h
hhh
pv B
v L pv BvuuC vu A
M p X u find
(36)
For all .and1 h
hhhM q X u
We define the appropriate bases for the finite elementspaces, leading to non linear system of algebraic equations.Linearization of this system using Newton iteration gives thefinite dimensional System:
:such thatand 1 hhhh M p X u find
(37)
)(,
)(, ,,
,,:
hk hh
hk hhhhh
hhhh
T
hhh
qr qu B
v R pv BvuuC
vuuC v Auvu
For all .and1 h
hhh M q X u
Here, )( hk v R
and )( hk qr are the non linear residuals
associated with the discrete formulations (36). To define thecorresponding linear algebra problem, we use a set of vector-
valued basis functions unii ,...,1
So that
uu n
j
j jh
n
j
j jh uuuu11
. ; (38)
We introduce a set of pressure basis functions pnk k ,...,1
and set
.;11
p p n
k
k k h
n
k
k k h p p p p (39)
Where un and pn are the numbers of velocity and pressure
basis functions, respectively.
We find that the discrete formulation (37) can be expressed as
a system of linear equations
.00
0
00
f
P
U
B
BW N AT
(40)
The system is referred to as the discrete Newton problem.
The matrix 0 A is the vector Laplacian matrix and 0 B is the
divergence matrix
(41) :;][ ,,0
Aaa AT
i ji ji ji
.;][ ,,0 jk jk jk bb B
(42)
The vector-convection matrix N and the Newton derivative
matrix W are given by
).( ;][ ,, jih ji ji unn N
(43)
).( ;][ ,, jhi ji ji uwwW
(44)
For .,...,1and,...,1; pu nk n ji
The right-hand side vectors in (40) are
,.;][ iiii g f f f f
(45)
for ,,...,1 uni
For Picard iteration, we give the discrete problem
.00
0
00
f
P
U
B
B N AT
(46)
VI. A POSTERIORI ERROR ESTIMATOR
In this section we propose two types of a posteriori error indicator, a residual error estimator and local Poisson problem

7/28/2019 Paper 24-A Posteriori Error Estimator for Mixed Approximation of the Navier-Stokes Equations With the C a b c Bo…
http://slidepdf.com/reader/full/paper-24-a-posteriori-error-estimator-for-mixed-approximation-of-the-navier-stokes 5/11
(IJACSA) International Journal of Advanced Computer Science and Applications,Vol. 4, No.3, 2013
149 | P a g e
www.ijacsa.thesai.org
estimator, which are shown to give global error estimates thatare equivalent to the true error.
A. A Residual Error Estimator
The bubble functions on the reference element
)1,0()1,0(~
T are defined as follows:
)1()1(24~ y y x xbT
)1)(1(22~,
~1
y x xb T E
x y ybT E
)1(22~,
~2
x x ybT E
)1(22~
,~
3
)1)(1(22
~,
~4
x y ybT E
HereT
b~ is the reference element bubble function, and
T E ib ~
,~ , 4:1i are reference edge bubble functions. For any
,hT T the element bubble functions isT T T F bb ~ and
the element edge bubble function is ,~,
~, T T E T E F bbii
where
T F the affine map form T.to~T
For an interior edge ,h E , E b is defined piecewise, so
that 2:1,, ibbii T E T E
where21 TTE .
For a boundary edgeT E E h bb ,, ,E , where T is the
rectangle such that .E T
With these bubble functions, ceruse et al ([3], lemma 4.1]established the following lemma.
Lemma 6.1. Let T be an arbitrary rectangle in andhT
For any ),(and)(00
E P vT P v k E k T
the following
inequalities hold.
,0
,0
2
1
,0 T T k
T
T T T T k vC bvvc
(47)
,0
1
,1 T T T k T T T vhC bv (48)
E E k
E
E E E E k vC bvvc,0
,0
2
1
,0
(49)
,0,0
21
E E E k T E E vhC bv
(50)
,0,1
21
E E E k T E E vhC bv
(51)
Where k c andk C are tow constants which only depend
on the element aspect ratio and the polynomial degrees 0k
and1k .
Here, 0k and 1k are fixed and k c andk C can be
associated with generic constants c and C In addition, E v
which is only defined on the edge E also denotes its naturalextension to the element T.
From the inequalities (50) and (51), we established the
following lemma:
Lemma 6.2. Let T be a rectangle and ., hT E
For any ),(0 E P v k E
the following inequalities hold.
,0,
21
E E E k T J E E vhC bv
(52)
Proof. Since
0
E E bv in the other three edges of rectangleT, it can be extended to the whole of Ω by setting 0
E E bv
in ,T then
and,1,1
E E T E E bvbv
,, J E E T J E E bvbv
Using the inequalities (19), (50) and (51) gives
,, J E E T J E E bvbv
,12 E E bvc
T E E bvc,12
2
12
,1
2
,02 T E E T E E bvbvc
E E E E k vhhC c,0
211
2
E E E k vh DC c,0
2
1
2
12
2 1
E E E vCh,0
2
1
With D is the diameter of Ω and .1 2
12
2 DC cC k
We recall some quasi-interpolation estimates in thefollowing lemma.
Lemma 6.3. Clement interpolation estimate: Given
),(v1 H
let 1
hXhv
be the quasi-interpolant of v
defined
by averaging as in [4]. For any ,hT T
,~,1,0 T
vChvv T T h
(53)
and for all ,T E
~,1
2
1
,0 E
vChvv E E h
(54)
We let pu,
denote the solution of (18) and let denote
hh
pu ,
the solution of (36) with an approximation on a
rectangular subdivision .hT
Our aim is to estimate the velocity and the pressure errors
).( and )(2
0
1
0, L p p H uue hnh
The element contribution ,,T R of the residual error estimator
R is given by2
,0
2
,0
2
,0
22
, E
E T E E T T T
T T T R Rh R Rh
(55)
and the components in (55) are given by
T puuu f RhhhhT
/2

7/28/2019 Paper 24-A Posteriori Error Estimator for Mixed Approximation of the Navier-Stokes Equations With the C a b c Bo…
http://slidepdf.com/reader/full/paper-24-a-posteriori-error-estimator-for-mixed-approximation-of-the-navier-stokes 6/11
(IJACSA) International Journal of Advanced Computer Science and Applications,Vol. 4, No.3, 2013
150 | P a g e
www.ijacsa.thesai.org
T u R hT /.
;
;2
1
,,
,
hT E hh
T
h
hhh
E
E n I pu Au g
E I pu R
With the key contribution coming from the stress jumpassociated with an edge E adjoining elements T and S:
S I puT I pu I pu hhhhhh //
The global residual error estimator is given by:
hT T T R R
2
,
Our aim is boundh X h p puu and
with respect to
the norm J
. for velocityΩJ,X
vv
and the quotient
norm for the pressure .Ω0,
p p M
For any ,hT T and ,T E we define the following two
functions:
;T T T
b Rw
, E E E
b Rw
T,on0
T w
.on0thenif , E E h wT E
.T rectangleof edges
other in the0thenif ,
E h wT E
.if T-in0
.if -in0
T-in0
:setting by
of wholetoextended becanand
,
,
h E
h E E
T
T E
T E w
T E w
w
ww
With these two functions we have the following lemmas:
Lemma 6.4. For any hT T we have:
..:. T T
T T T
T wuuw pI uw f
(56)
Proof Using (1) gives
T
T T
T w puuuw f
2
...
By applying the Green formula and T,on0
T w we
obtain
...:
..:
..
T T
T T
T T
T T
T T T T
wuuw pI u
wuuw pI u
wn pI uw f
Lemma 6.5
:haveweif i) , hT E
..:.
E E E E E E wuuw pI uw f
(57)
:haveWe,if ) , hT E ii
..
:.
T T
T E
T
T E
T E
wuuw g Au
w pI uw f
(58)
Proof.i) The same proof of (56).
:haveWe,If ) , hT E ii
T T
T E
T E
T T
T T
wuu
wn pI uw pI u
w puuuw f
..
.:
... 2
We have
0 and
E
T T w E on g Auu pI n
in the other tree edges of rectangle T, then
...
:.
T T
T E
T
T E
T E
wuuw g Au
w pI uw f
We define the bilinear form
),(),(),(),();,( pv Bqu Bvu Aqv puG
We define also the following functional
).(,,and allfor
....,,,
1
0,
n
K K
H v y x K
v y yv x xv y x K
Lemma 6.6. There exists 0 and 0 0 hC such that
. and)( ,allfor
,,,,
1
0,0
,,
K H vhh
veC vuu K
n
K J K J h
(59)
Proof . Using (27), (32) and (35), we have that for
)(10, n H v
(60) )2(
).2(
).(
....
....,,,
,,,
,
2
,,,,
,,,,,,
K J K J K J
K J K J K J K J K J
K J K J h K J K J K J K J
K h
K
K hh
K h
vee N
veveu N
vueveu N
vueveu
vuuvuuvuu K
We have)(inlim 1
0,0
nhh
H uu
, then there exists 00h such that
.allfor 1 0,,hhuue
K J h K J
Using this result and (60), we obtain
.2Cwith),(andallfor
,,,
10,0
,,
N H vhh
veC vuu K
n
K J K J h

7/28/2019 Paper 24-A Posteriori Error Estimator for Mixed Approximation of the Navier-Stokes Equations With the C a b c Bo…
http://slidepdf.com/reader/full/paper-24-a-posteriori-error-estimator-for-mixed-approximation-of-the-navier-stokes 7/11
(IJACSA) International Journal of Advanced Computer Science and Applications,Vol. 4, No.3, 2013
151 | P a g e
www.ijacsa.thesai.org
We have
).,(
),(),(),,(-)(
),();,(),,(-)(
),();,(-),();,(
),(),(),(),();,(
qu B
pv Bvu AvuuC v L
qv puGvuuC v L
qv puGqv puG
p pv Bquu Bvuu AqveG
h
hh
hh
hh
hhh
).()(),(allfor
),(),(),(
)(),,( ,,,),();,(
2
0
1
0,
L H qv
qu B pv Bvu A
v LvuuC vuuqveG
Then
n
hhh
hhh
(61)
)(and )( errorsthat thefindWe 20
10, L H e n
Satisfy the non-linear equation
).()(),(allfor
),(),(),(
,,,),();,(
2
0
1
0,
L H qv
q Rv Rv R
vuuqveG
n
T T T E
T T E E T T
h
h
(62)
)()(),( pair adefineWe 20
10, L H n
to be the Ritz projection of the modified residuals
).()(),(
,,,),();,(
,,,),(),(),(),(),(
2
0
1
0,
L H qvall for
vuuqveG
vuuv Bqe Bve Aqd v A
n
h
h
(63)
Lemma 6.7 1 allfor 0),( hhh X vv A
(64)
Proof: we set hvvq
and0 in (62), we obtain
.0)()(
),,(),,(
),(),(),(),(
,,,),(),(),(
hh
hhhh
hhhhhh
hhhhh
v Lv L
vuuC vuuC
pv B pv Bvu Avu A
vuuv Bve Av A
Next, we establish the equivalence between the norms of
)()(),( 20
10, L H e n
and the norms of the solution
)()(),( 20
10, L H n
of (63).
Theorem 6.8. Let the conditions of theorem 4.6 hold.
There exist two positive constants ,and 21 k k independent of
h, such that
2
,0
2
,2
2
,0
2
,
2
,0
2
,1
J J J k ek
Proof. The same proof of theorem 3 in [9].
Theorem 6.9.
havewe),()(),(allFor 20
10, L H sw n
).(2
1
),(),(sup
,0,
,0,),(
20
10,
swqv
q sd vw A J
J L H qv n
(65)
Proof. havewe),()(),(Let 20
10, L H sw n
(66) ),(
0
)0,(),(
),(),(sup
,
,
,0,,0,),(
20
10,
J
J
J J L H qv
ww
ww A
v
sd ww A
qv
q sd vw A
n
(67) .
),(
0
),()0,(
),(),(sup
havealsoWe
,0
,0
,0,,0,),(
20
10,
s s
s sd
s
s sd w A
qv
q sd vw A
J J L H qv n
We gather (66) and (67) to get
).(2
1
),(),(sup
,0,
,0,
),(20
10,
swqv
q sd vw A J
J
L H qv n
Theorem 6.10. For any mixed finite elementapproximation (not necessarily inf-sup stable) defined on
rectangular grids hT , the residual estimator R satisfies:
,,0, R J
C e
and .2
1
'
2
',0
2
',,
T T T T J T R eC
Note that the constant C in the local lower bound is
independent of the domain, and
..:2
,
T T
T
T J e Aeeee
Proof . To establish the upper bound we let12
01
0, and)()(),( hhn X v L H qv
be the clement
interpolation of .v
Using (63), (61) and (62), give

7/28/2019 Paper 24-A Posteriori Error Estimator for Mixed Approximation of the Navier-Stokes Equations With the C a b c Bo…
http://slidepdf.com/reader/full/paper-24-a-posteriori-error-estimator-for-mixed-approximation-of-the-navier-stokes 8/11
(IJACSA) International Journal of Advanced Computer Science and Applications,Vol. 4, No.3, 2013
152 | P a g e
www.ijacsa.thesai.org
1
1
),() ,(),(
),() ,(),(),(
2
1
2
,0
2
1
2
,0
2
1
2
,02
2
1
2
,0
2
,0,0
,0,0,0,0
hh
hh
h
h
T T T E E h
E T T T E T
E E
T T T h
T T T T
T T
E T T
T T E h
T E
T T T h
T T
T T T E
T T E h E T hT
h
vvh
Rh
vvh
Rh
Rq
vv Rvv R
q Rvv Rvv R
qd vv Aqd v A
Using (52) and (53), then gives
.
),(),(
2
1
2
,0
2
,0
2
,0
2
2
1
2
,0
2
,
h
h
T T E
E T E E T T T
T T
T T T T J
Rh R Rh
qvC qd v A
Finally, using (65) gives:
hT T E
E T E E T T T
T T T T J Rh R RhC
2
,0
2
,0
2
,0
2
,0,
According to theorem 6.8, we have
hT T
E E T E E T T
T T T T T J
Rh R RhC e 2
,0
2
,0
2
,0
2
,0,
This establishes the upper bound.
Turning to the local lower bound. First, for the elementresidual part, we have:
T T hh
T T hh
T T T hhT
T T T hhhhT T
wuuwn I pu
w I puw f
w puuu f w R
).(.)(
:)(.
)..(.
2
See that Tin0
T w , using (56) and (57) gives:
)eC(.
gives (48),Using
,thenT,in0 Since
'')e(C'
,,,:)(.
,0
12
12
,0
2
,
,1,
,,,1,0,1
T T T T T J T
T T
T T T J T
T J T J T T T T
T hT T
T T T
Rhw R
www
weC w
wuuT w I ew R
In addition, from the inverse inequality (47)
,.2
T0,
2
,0
2
1
T k
T
T T T
T T Rcb Rw R
Thus, )e(2
,0
2
,
2
T0,
2
T T J T T C Rh
(68)
Next comes the divergence part,
(69) 22
2
)(.
.
,,
,1
,0
,0,0
T J T J h
T h
T h
T hT T
euu
uu
uu
u R
Finally, we need to estimate the jump term. For an edge
haveWe,if , hT E
E i
T E hh E E
i
wn I puw R2:1
.)(.2
2:1
2.).(:)(
iT
E hh E hhi E
w puw I pu
:gives,in0and(57)Using E
E w
E E
iii E E E
ii
E
J E J
iT E
T T E
iT
E h E E T
E E
E E
weC
w Rwe
wuuw R
w I ew R
,,
2:1,0,0,1,0,1
2:1
)(
,,,
:)(.2
EE ,1,E then,in0 Since
T J E www
Using (50) and (51), to get
E E E
iT
T
E E E
E E E
Rh R
RheC w R
ii
E E
,02
1
2:1,0
,0
2
1
2
12
,0
2
,1
)('.2
Using (68), gives
)(.2,0
2
1
2
12
,0
2
, E E E J E
E E RheC w R E E
(70)
Using the inverse inequality (49) and thus using (70) gives
)eC(2
,0
2
,
2
E0, E E J E E Rh
(71)
Also need to show that (70) holds for boundary edges.
haveWe,anFor , hT E .)(.
E T
E hh
T
h E E w g n I pu Auw R
.)(
:)(.
.)(.
2
T E hh
T T E hh E
T
h
T T E hh E
T
h
w pu
w I puw g Au
wn I puw g Au
Using (58), (59) and (4), gives

7/28/2019 Paper 24-A Posteriori Error Estimator for Mixed Approximation of the Navier-Stokes Equations With the C a b c Bo…
http://slidepdf.com/reader/full/paper-24-a-posteriori-error-estimator-for-mixed-approximation-of-the-navier-stokes 9/11
(IJACSA) International Journal of Advanced Computer Science and Applications,Vol. 4, No.3, 2013
153 | P a g e
www.ijacsa.thesai.org
)(
'
)(
,,,.
.:)(.
,0,0,,0,
,0,0,,
,0,01,1,0,1
T E
T T
T J E
T T J
T E T
T T J E T J
T E T T E T T
T E h E T
T E
T
E T E E E
w RweC
w RweC
wewe
wuuT w R
w Aew I ew R
Using (50) and (52) gives
E E E
T T
E E E T T J E
E E
Rh R
RheC w R
,0
2
1
,0
,0
2
1
2
12
,0
2
,1
)(.
Using (69) gives
)(.,0
2
1
2
12
,0
2
, E E E T T J E
E E RheC w R
(72)
Using (49), then
gives(71),usingand
,.2
,0
2
,0
2
1
E E
E
E E E
E E Rcb Rw R
)eC(2
,0
2
,
2
E0, T T J E E Rh
(73)
Finally, combining (68), (69), (71) and (73) establishes the
local lower bound.
B. The Local Poisson Problem Estimator .
The local Poisson problem estimator defined as:
hT T
T P P
2
,
2
,0,
2
,,
2
, T T P T J T P T P e
(74)
Let
Ton0.:)( 1
nvT H vV T
T T
T
T P T P T P T v Aeveve A .:),( ,,,
T T P V e ,
Satisfies the uncoupled Poisson problems
)(
, ),(),(),(T E
E E T T T P T v Rv Rve A
(75)
.anyfor T V v
And ./., T uhT P
(76)
Theorem 6.11. T P , is equivalent to T R, estimator:
.,,, T P T RT P C c
Proof. For the upper bound, we first let T T T b Rw
( T b is
an element interior bubble).
From (75),
T T T T P
T T T P T T T
we
wew R
,1,1,
,
),(),(
Using (48) we get
),( 2
1 2
,0,
2
,,,0
1
T T P T J T P T
T T T T T e RChw R (77)
In addition, from the inverse inequalities (47),
T T T T w R R ),C.(2
T0,
And using (77), to get
.2
,0,
2
,,
2
,0
2
T T P T J T P T
T T eC Rh
(78)
Next, we let E E E b Rw
( E b is an edge bubble function).
If , , hT E using (75), (78), (50) and (51) give
),(),(),(
2
1 2
,0,
2
,,,0
,0,0,,,
,
21
T T P T J T P E
E E
T E T
T T J E T J T P
T E T T E T P T E E E
e RCh
w Rwe
w Rwe Aw R
, if , hT E
See that the matrix A defined just in , then we can posed
.in0 A
Using (75), (50), (51) and (78) give
),(),(),(
,0,0,1,1,
,
T E T
T T E T T P
T E T T E T P E E E
w Rwe
w Rwew R
2
1 2
,0,
2
,,,0
2
1
T T P T J T P E
E E e RCh
),(
havewe,anyandTanyfor Finally,
2
1 2
,0,
2
,,,0
21
T T P T J T P E
E E E E E
h
e RChw R
T E T
From this result and the inverse inequalities (49), give
.2
,0,
2
,,
2
,0 T T P T J T P T
T E eC Rh
(79)
We have also ,.,0,,0,0 T T P T hT T u R
then
.2
,0,
2
,,
2
.0 T T P T J T P T T
e R
(80)
Combining (78), (79) and (80), establishes the upper bound in
the equivalence relation.
For the lower, we need to use (65):

7/28/2019 Paper 24-A Posteriori Error Estimator for Mixed Approximation of the Navier-Stokes Equations With the C a b c Bo…
http://slidepdf.com/reader/full/paper-24-a-posteriori-error-estimator-for-mixed-approximation-of-the-navier-stokes 10/11
(IJACSA) International Journal of Advanced Computer Science and Applications,Vol. 4, No.3, 2013
154 | P a g e
www.ijacsa.thesai.org
),(),(
sup2
,0,
,,
)(),(
T0,,,,
2
1 2
,0,
2
,,,
20 T T J
T P T P T
T LV qv
T P T J T P
T T P T J T P T P
qv
qd ve A
e
e
T
Using (75) and (76) give
,
),(),(),(
sup2
,0,)(),(
,20 T T J
T E
T T E E T T
T LV qvT P
qv
q Rv Rv R
T
then
sup2
,0,
,0,0,0,0,0,0
)(),(,
20 T T J
T E T T T E E
E T T T
T LV qvT P
qv
q Rv Rv R
T
(82)
Now, sincev
is zero at the four vertices of T, a scalingargument and the usual trace theorem, see e.g. [15, Lemma
1.5], shows that v
satisfies
T E E vChv ,12
1
,0
(83)
T T T vChv
,1,0
(84)
Combining these two inequalities with (82) immediatelygives the lower bound in the equivalence relation.
Consequence 6.12. For any mixed finite elementapproximation (not necessarily inf-sup stable) defined on
rectangular grids hT , the residual estimator P satisfies:
P J C e
,0,
Note that the constant C in the local lower bound independentof the domain.
VII. NUMERICAL SIMULATION
In this section some numerical results of calculations withmixed finite element Method and ADINA system will be
presented. Using our solver, we run the flow over an obstacle[15] with a number of different model parameters.
Example: Flow over an obstacle. This is another classical
problem. The domain is and is associated with modellingflow in a rectangular channel with a square cylindricalobstruction. A Poiseuille profile is imposed on the Inflow
boundary ),11 ;0( y x and noflow (zero velocity)
condition is imposed on the obstruction and the top and bottom walls. A Neumann condition is applied at the outflow boundary which automatically sets the mean outflow pressure
to zero. a disconnected rectangular region 1)(-1,×8)(0,
generated by deleting the square 1/4).(-1/4,×9/4)(7/4,
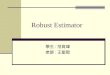
Fig.1. Equally distributed streamline plot associated with a 32×80 squaregrid
01 P Q approximation and .
5001
Fig.2. uniform streamline plot computed with ADINA System, associated
with a 32 × 80 square grid and.
5001
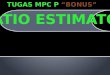
Fig.3. Velocity vectors solution by MFE with a 32 × 80 square grid and
.500
1
Fig.4. The solution computed with ADINA system. The plots show the
velocity vectors solution with a 32 × 80 square grid and .500
1
The two solutions are therefore essentially identical. Thisis very good indication that my solver is implementedcorrectly.
Fig.5. Pressure plot for the flow with a 32 × 80 square grid.

7/28/2019 Paper 24-A Posteriori Error Estimator for Mixed Approximation of the Navier-Stokes Equations With the C a b c Bo…
http://slidepdf.com/reader/full/paper-24-a-posteriori-error-estimator-for-mixed-approximation-of-the-navier-stokes 11/11
(IJACSA) International Journal of Advanced Computer Science and Applications,Vol. 4, No.3, 2013
155 | P a g e
www ijacsa thesai org
Fig.6. Estimated error T R, associated with 32 × 80 square grid and
01 P Q approximation
TABLE I.TABLE1. The local Poisson problem error estimator Flow over
an obstacle with Reynolds number Re = 1000.
hu. estimated velocity divergence error.
Grid
,0. hu
P
8 × 20 5.892389e-001 3.210243e+001
16 × 40 1.101191e-001 6.039434e+000
32 × 80 3.707139e-002 2.802914e+00064 ×160 1.160002e-002 1.484983e+000
TABLE II. A residual error estimator for Flow over an obstacle withReynolds number Re = 1000.
Grid R
8 × 20 9 ,309704e+00
16 × 40 1,727278e+000
32 × 80 8,156479e -001
64 × 160 4.261901e-001
VIII. CONCLUSION
We were interested in this work in the numeric solution for two dimensional partial differential equations modelling (or arising from) model steady incompressible fluid flow. Itincludes algorithms for discretization by mixed finite elementmethods and a posteriori error estimation of the computedsolutions. Our results agree with Adina system.
Numerical results are presented to see the performance of the method, and seem to be interesting by comparing themwith other recent results.
ACKNOWLEDGMENT
The authors would like to express their sincere thanks for the referee for his/her helpful suggestions.
References
[1] Alexandre Ern, Aide-mémoire Eléments Finis, Dunod, Paris, 2005.
[2] P.A. Raviart, J. Thomas, Introduction l’analyse numérique des équationsaux dérivées partielles, Masson, Paris, 1983.
[3] E. Creuse, G. Kunert, S. Nicaise, A posteriori error estimation for theStokes problem: Anisotropic and isotropic discretizations, M3AS,Vol.14, 2004, pp. 1297-1341.
[4] P. Clement, Approximation by finite element functions using local
regularization, RAIRO. Anal. Numer, Vol.2, 1975, pp. 77 -84.[5] T. J. Oden,W.Wu, and M. Ainsworth. An a posteriori error estimate for
finite element approximations of the Navier-Stokes equations, Comput.Methods Appl. Mech. Engrg, Vol.111, 1994, pp. 185-202.
[6] V. Girault and P.A. Raviart, Finite Element Approximation of the Navier-Stokes Equations, Springer-Verlag, Berlin Heiderlberg New
York, 1981.[7] A. Elakkad, A. Elkhalfi, N. Guessous. A mixed finite element method for
Navier-Stokes equations. J. Appl. Math. & Informatics, Vol.28, No.5-6,
2010, pp. 1331-1345.[8] R. Verfurth, A Review of A Posteriori Error Estimation and AdaptiveMesh-Refinement Techniques, Wiley-Teubner, Chichester, 1996.
[9] M. Ainsworth and J. Oden. A Posteriori Error Estimation in FiniteElement Analysis. Wiley, New York, [264, 266, 330, 334, 335], 2000.
[10] M. Ainsworth, J. Oden, A posteriori error estimates for Stokes’ andOseen’s equations, SIAM J. Numer. Anal, Vol. 34, 1997, pp. 228– 245.
[11] R. E. Bank, B. Welfert, A posteriori error estimates for the Stokes problem, SIAM J. Numer. Anal, Vol.28, 1991, pp. 591 – 623.
[12] C. Carstensen,S.A. Funken. A posteriori error control in low-order finiteelement discretizations of incompressible stationary flow problems.Math. Comp., Vol.70, 2001, pp. 1353-1381.
[13] D. Kay, D. Silvester, A posteriori error estimation for stabilized mixedapproximations of the Stokes equations, SIAM J. Sci. Comput, Vol.21,1999, pp. 1321 – 1336.
[14] R. Verfurth, A posteriori error estimators for the Stokes equations, Numer. Math, Vol.55, 1989, pp. 309 – 325.
[15]
H. Elman, D. Silvester, A. Wathen, Finite Elements and Fast IterativeSolvers: with Applications in Incompressible Fluid Dynamics, OxfordUniversity Press, Oxford, 2005
[16] V. John. Residual a posteriori error estimates for two-level finite elementmethods for the Navier-Stokes equations, App. Numer. Math., Vol.37,2001, PP. 503-518.
[17] D. Acheson, Elementary Fluid Dynamics, Oxford University Press,Oxford, 1990.