Embed Size (px)
Citation preview

PARAMETERIZED SURFACES AND SURFACE AREA
PORAMATE (TOM) PRANAYANUNTANA
Definition. Given a function ~f : T ⊂st-plane︷︸︸︷R2 −→ S ⊂
xyz-space︷︸︸︷R3 , we define the surface param-
eterized by ~r = ~f to be the set of points S =
~r(s, t) ∈ R3︸︷︷︸xyz-space
∣∣∣∣(s, t) ∈ T ⊂ R2︸︷︷︸st-plane
.
~f =
f1
f2
f3
−−−−−−−−−−−→
(s, t) 7−→ ~r = ~f(s, t)
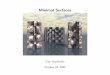
Figure 1. The parameterization sends each point (s, t) in the parameter re-
gion, T , to a point (x, y, z) or position vector ~r = [f1(s, t), f2(s, t), f3(s, t)]T onthe surface, S.
That is, S is the image of T under ~f . The equation ~r = ~f(s, t) is a parameterization of S.
We say that the parameterization by ~f =
f1
f2
f3
is smooth if the Jacobian matrix
J ~f(s, t) =
f1s f1t
f2s f2t
f3s f3t
(1)
Date: June 24, 2015.

Parameterized Surfaces and Surface Area Poramate (Tom) Pranayanuntana
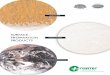
Figure2. The surface parameterizedby ~r = [s, 1− t2, t3 − t]T , where−1 ≤ s ≤ 1 and −1.2 ≤ t ≤ 1.2,is not simple.
Figure 3. Astroidal sphereparameterized by ~r =[sin3 s cos3 t, sin3 s sin3 t, cos3 s]T ,where 0 ≤ s ≤ π and0 ≤ t < 2π, is not smooth.
has continuous entries and the normal vector ~nS = ~rs × ~rt = ~fs × ~ft never zero. A surface Sis simple if it has a parameterization that is given by a one-to-one function. A surface S issaid to be smooth if it has a one-to-one smooth parameterization.
The requirement that J ~f(s, t) be continuous is to ensure a continuously varying normal ~nS tothe surface, and the nonvanishing cross product is to assure that the normal never becomesthe zero vector. These together hold the intuitive idea that a smooth surface is one withoutcusps or creases. The definition of a simple surface is designed to take out self-intersectionssuch as that shown in Figure 2.
In Figure 3, for instance, is the surface parameterized by
~r =
sin3 s cos3 tsin3 s sin3 t
cos3 s
(2)
where 0 ≤ s ≤ π and 0 ≤ t < 2π. It is not smooth because, for example, ~nS = ~rs×~rt vanisheswhen s = π/2 and t = 0; this is the sharp point on the surface at the point (1, 0, 0). A smoothsurface without self-intersections is sometimes called a manifold. Roughly speaking, amanifold then should, in the vicinity of each point not on its boundary, resemble a plane.
Surface Area
Orientation of a Surface At each point on a smooth surface there are two unit normals,one in each direction. Choosing an orientation means picking one of these normals atevery point of the surface in a continuous way. The unit normal vector in the direction of theorientation is denoted by n̂S. For a closed surface (that is, the boundary of a solid region),we usually choose the outward orientation.
June 24, 2015 Page 2 of 4

Parameterized Surfaces and Surface Area Poramate (Tom) Pranayanuntana
The Area Vector Later on, when we talk about flux of a vector field, the flux through aflat surface depends both on the area of the surface and its orientation. Thus, it is useful torepresent its area by a vector called the area vector, denoted ~AS.
Definition. The area vector for a flat oriented surface S is a vector whose magnitude is thearea of the surface, and whose direction is the direction of the orientation vector n̂S; that is
~AS = ASn̂S.
To obtain a reasonable definition of the area of a non-flat surface S lying in R3 that is
parameterized by ~r = ~f(s, t), where (s, t) ∈ T ⊂ R2, we reason as follows. If we partitionT into many small rectangles, then S is partitioned into many pieces, each of which is the
image under ~f of one of these small rectangles. See Figure 4.
Figure 4. Parameter rectangle on the surface S corresponding to a smallrectangular region in the parameter region, T .
If ~f is differentiable on T , then on each of these small rectangles, ~f has a good linear
approximation, so the image of a small rectangle under ~f closely resembles the image ofthe same rectangle under the linear approximation ~L. We consider a parameter rectangle(a patch) on the surface S corresponding to a rectangular region with sides ∆s and ∆t in
the parameter region, T . If ∆s and ∆t are small, the area vector, ∆ ~AS, of the patch is
June 24, 2015 Page 3 of 4

Parameterized Surfaces and Surface Area Poramate (Tom) Pranayanuntana
approximately the area vector of the parallelogram defined by the vectors
~r(s+ ∆s, t)− ~r(s, t)︸ ︷︷ ︸secant vector displaced from one point
to another point on surface S : ~r = ~f
corresponding to moving from (s, t)
to (s + ∆s, t) on parameter region T
≈ ∂~r
∂s∆s︸ ︷︷ ︸
tangent vector∂~r
∂son tangent plane:
~r = ~L, multiplied by the run ∆s
, and
~r(s, t+ ∆t)− ~r(s, t)︸ ︷︷ ︸secant vector displaced from one point
to another point on surface S : ~r = ~f
corresponding to moving from (s, t)
to (s, t + ∆t) on parameter region T
≈ ∂~r
∂t∆t︸ ︷︷ ︸
tangent vector∂~r
∂ton tangent plane:
~r = ~L, multiplied by the run ∆t
.
Thus
∆ ~AS ≈∂~r
∂s∆s× ∂~r
∂t∆t =
(∂~r
∂s× ∂~r
∂t
)∆s∆t.
From the reasoning above, we assume that the vector ~rs × ~rt is never zero and points in thedirection of the unit normal orientation vector n̂S. If the vector ~rs×~rt points in the oppositedirection to n̂S, we reverse the order of the cross-product. Replacing ∆ ~AS, ∆s, and ∆t byd ~AS, ds, and dt, we write
d ~AS =∂~r
∂sds× ∂~r
∂tdt =
(∂~r
∂s× ∂~r
∂t
)dsdt.
Area of a Parameterized Surfaces The area ∆AS of a small parameter rectangle, whichis approximately flat, is the magnitude of its area vector ∆ ~AS. Therefore,
Area of S =∑
∆AS =∑∥∥∥∆ ~AS
∥∥∥ ≈∑ ‖~rs × ~rt‖∆s∆t.
Taking the limit as the area of the parameter rectangles tends to zero, we are led to thefollowing expression for the area of S.
The Area of a Parameterized Surface The area of a surface S which is
parameterized by ~r = ~r(s, t) = ~f(s, t), where (s, t) varies in a parameter region T ,is given by
AS =
∫S:~r(s,t),(s,t)∈T
dAS =
∫S:~r(s,t),(s,t)∈T
∥∥∥d ~AS
∥∥∥ =
∫T
‖~rs × ~rt‖ dsdt︸︷︷︸dAT
. (3)
June 24, 2015 Page 4 of 4




![The Parameterized Complexity of Cascading Portfolio Schedulingpapers.nips.cc/paper/8983-the-parameterized... · Parameterized Complexity. In parameterized algorithmics [6, 4, 3, 9]](https://img.pdfslide.net/doc/110x75/5fa9b75fd3f3e97ad8547d86/the-parameterized-complexity-of-cascading-portfolio-parameterized-complexity-in.jpg)