Embed Size (px)
Citation preview
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 11 de 180
PARTE I. CONCEPTOS ASOCIADOS AL TRANSPORTE VERTICAL MEDIANTE ASCENSORES
1 CONCEPTO DE TRANSPORTE VERTICAL
Se denomina transporte vertical al desplazamiento en sentido ascendente y descendente de personas y bienes a través de las plantas de un edifico.
Los medios disponibles para llevar a cabo dicho transporte son dos y complementarios: escaleras y ascensores.
2 LA NECESIDAD DE ASCENSORES
Los ascensores se instalan en los edificios para satisfacer las necesidades de transporte vertical de sus ocupantes. La capacidad de transporte del conjunto de los ascensores de un edificio constituye un factor crucial en el éxito del funcionamiento de éste como lugar de trabajo, de residencia o de servicios. Deben de estar siempre disponibles, ser de fácil accesibilidad y proporcionar un servicio fiable y de calidad.
En edificios de oficinas y de propósito comercial en general, el conjunto de ascensores debe instalarse para proporcionar un movimiento eficiente del personal durante la jornada laboral minimizando el tiempo pérdido en los desplazamientos que se traduce en un ahorro de dinero (beneficio). Por el contrario en viviendas residenciales no existe esta necesidad o al menos no posee la misma importancia por lo que se toman como regla ciertas normas para al menos proporcionar un servicio mínimo.
Desde el fin de la segunda guerra mundial (1945) el número de edificios “medianos” y altos existentes ha aumentado considerablemente, proporcionando un fuerte empuje a la industria del sector que siempre se ha caracterizado por la inclusión de las nuevas tecnologías, así las cabinas se hicieron automáticas y posteriormente hidráulicas, se desarrollaron sistemas de control y de gestión del tráfico y se incluyeron dispositivos digitales en el equipo. También se mejoraron el diseño de las instalaciones y la instalación propiamente dicha de los sistemas.
3 DEFINICIÓN DEL PROBLEMA DE LA GESTIÓN DEL TRÁFICO VERTICAL
El problema de la gestión del tráfico vertical consta de dos partes:
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 12 de 180
� La primera hace referencia al diseño de la instalación (número, ubicación y características de los ascensores).
� La segunda a la gestión y supervisión del funcionamiento del sistema.
Su evaluación es doble:
� Atendiendo a la cantidad (quantity of service) se calcula la solvencia (handling capacity, HC) medida en usuarios/unidad de tiempo del sistema para comprobar si es capaz de ofrecer la capacidad de transporte necesaria.
� Desde el punto de vista de calidad de servicio (quality of service) se suele calcular el tiempo medio de espera de los pasajeros (average waiting time, AWT) como referencia.
Ambos parámetros no son totalmente independientes el uno del otro sino que existe un cierto grado de correlación entre ambos de forma que una vez alcanzado un diseño óptimo es difícil mejorar uno sin empeorar el otro.
Los métodos de resolución se pueden dividir a grandes rasgos en dos:
� El tradicional analítico basado en modelos matemáticos.
� El basado en simulación por ordenador.
El segundo proporciona un resultado mucho más exacto, pero el primero confiere una buena manera de obtener ciertos parámetros de forma aproximada que pueden ayudar a partir de una situación más o menos optimizada en el proceso de simulación.
NOTA: De ahora en delante se define:
� LCall (Landing Call): llamada realizada desde una planta (de ahora en adelante “llamada de planta”).
� CCall (Car Call): llamada realizada desde una cabina (de ahora en adelante “llamada de cabina”).
4 RESTRICCIONES EN EL DISEÑO
El diseño de la instalación del conjunto de ascensores debe tener en cuenta tres aspectos fundamentales, a saber:
� Las restricciones impuestas por las dimensiones del edificio, del núcleo donde se aloja el grupo de cabinas y/o los lugares donde se sitúan las entradas principales al edificio: Todas estas características suelen ser definidas previamente por el
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 13 de 180
arquitecto en cuestión de tal forma que limitan severamente el grado de libertad del diseñador de la instalación del conjunto de ascensores.
� Las restricciones impuestas por la fisilogía humana: los ascensores deben de garantizar el máximo confort a sus ocupantes, para ello deben de tener en cuenta el efecto de desagrado que produce el movimiento en los pasajeros cuando éste es tal que provoca el movimiento brusco de los organos dentro del cuerpo. Debido a la inercia, una velocidad constante, por muy alta que sea, nunca producirá sensación de disgusto. Por el contrario la aceleración y el impulso (aunque sean constantes) producirán sentimiento de malestar si superan ciertos valores críticos, que aunque dependientes de la constitución particular de cada cuerpo, suelen ser parecidos. Así se toma como convenio un límite máximo para la aceleración/deceleración de 1/8 de la gravedad terrestre o 1.5 m/s y para el impulso 2.0 m/s, estribando mayormente el problema en el control del impulso, pues mientras la velocidad y la aceleración pueden ser medidas por el sistema de control, el impulso no. Si éste supera el valor límite de 2.0 m/s aunque sea tan sólo unas décimas de segundo el pasajero notará malestar físico. De esta forma surge un problema de compromiso entre la calidad de servicio medida como tiempo de despacho de una llamada y la calidad de servicio medida como una forma de proporcionar un servicio agradable agrandado por la cuestión de que valores constantes de impulso requieren incrementos/decrementos constantes de aceleración/deceleración y esto no siempre es posible.
� Las restricciones impuestas por aspectos sicológicos humanos: el tiempo de espera (Waiting Time) constituye la principal forma de evaluar el funcionamiento del sistema para los usuarios, aunque el grado de servicio esperado difiere de forma sutil según el pasajero y en mayor medida según el momento del día y el lugar. Así, no le importará a un trabajador que el ascensor que lo transporta a su planta se retrase al inicio de la mañana pero si le molestará que lo haga al final de la jornada cuando se quiere marchar. Normalmente se toman como límites máximos del tiempo de espera unos 30 segundos para edificios de oficinas y 60 segundos para edificios residenciales. El tiempo de tránsito o de duración del viaje del pasajero dentro de la cabina (Travel Time o Trip Time) también constituye un factor importante a tener en cuenta aunque en menor medida que el tiempo de espera (WT). En este caso la apreciación subjetiva del paso del tiempo dentro de la cabina también se encuentra condicionanda por factores externos tales como que el individuo vaya acompañado con amigos o no.
5 PATRONES DE TRÁFICO
Si se tiene en cuenta que la problemática y el estudio se centran principalmente entorno a edificios con fines laborales o de servicios como complejos industriales, oficinas, hospitales u hoteles, y se generaliza, se puede dividir el tiempo de uso de las instalaciones a lo largo del día en las siguientes cinco conductas diferentes.
Master de Organización y Gestión de EmpresasTesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
� Máximo tráfico ascendentedemanda ascendente situada enpara describir el comienzo de la jornada laboral en un edificio de oficinas.
� Máximo tráfico descendentedemanda en sentido descendente Tiene ocasión al final
� Tráfico del mediodíaintenso ascendente y descendente desde y hacia la planta principal (MT), sucede durante el descanso entre turnos cuando los trabajadores abandonan o instalación para o después de comer.
� Tráfico entre plantas equilibradonormal de media mañana o tarde.
� Tráfico entre plantas no equilibradono habitual de media mañana o tarde provocado por una excesiva demanda en alguna de las plantas del edificioejemplo).
Figura
La teoría clásica (Barney el tráfico más severo y además afirma que una instalación capaz de proporcionar servicio aceptable en periodo UP, es capaz de ofrecer también entonces Es por esto que prácticamente todo el demás periodos son estudiados
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 14 de 180
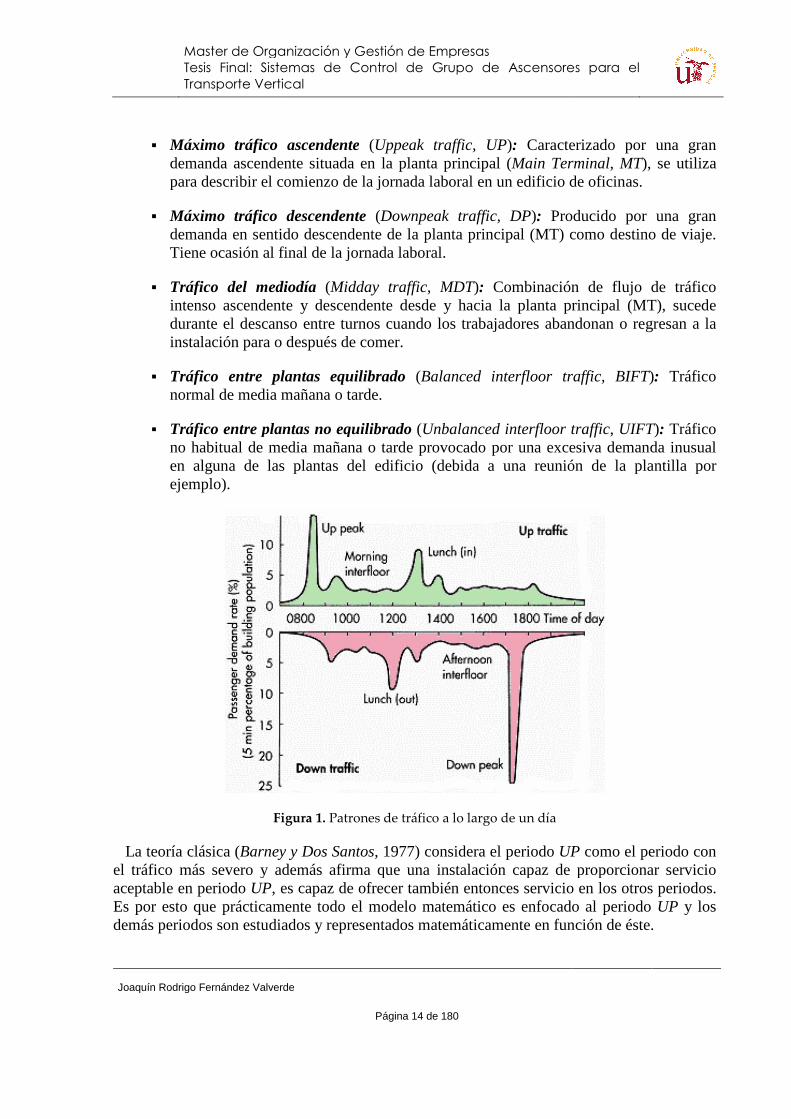
Máximo tráfico ascendente (Uppeak traffic, UP): Caracterizado por una gran ascendente situada en la planta principal (Main Terminal
para describir el comienzo de la jornada laboral en un edificio de oficinas.
Máximo tráfico descendente (Downpeak traffic, DP): Producido por una gran demanda en sentido descendente de la planta principal (MT) como destino de viaje.
final de la jornada laboral.
Tráfico del mediodía (Midday traffic, MDT): Combinación de flujo de tráfico intenso ascendente y descendente desde y hacia la planta principal (MT), sucede
scanso entre turnos cuando los trabajadores abandonan o instalación para o después de comer.
Tráfico entre plantas equilibrado (Balanced interfloor trafficnormal de media mañana o tarde.
Tráfico entre plantas no equilibrado (Unbalanced interfloor trafficl de media mañana o tarde provocado por una excesiva demanda
na de las plantas del edificio (debida a una reunión de la plantilla por
Figura 1. Patrones de tráfico a lo largo de un día
Barney y Dos Santos, 1977) considera el periodo UPs severo y además afirma que una instalación capaz de proporcionar servicio
, es capaz de ofrecer también entonces servicio en Es por esto que prácticamente todo el modelo matemático es enfocado al periodo demás periodos son estudiados y representados matemáticamente en función de
Tesis Final: Sistemas de Control de Grupo de Ascensores para el
aracterizado por una gran Main Terminal, MT), se utiliza
para describir el comienzo de la jornada laboral en un edificio de oficinas.
roducido por una gran de la planta principal (MT) como destino de viaje.
Combinación de flujo de tráfico intenso ascendente y descendente desde y hacia la planta principal (MT), sucede
scanso entre turnos cuando los trabajadores abandonan o regresan a la
Balanced interfloor traffic, BIFT): Tráfico
balanced interfloor traffic, UIFT): Tráfico l de media mañana o tarde provocado por una excesiva demanda inusual
(debida a una reunión de la plantilla por
UP como el periodo con s severo y además afirma que una instalación capaz de proporcionar servicio
servicio en los otros periodos. es enfocado al periodo UP y los
en función de éste.
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 15 de 180
Estas afirmaciones son discutibles, sobre todo en lo referente a la calidad del servicio. Si bien una instalación que funcione correctamente en términos de HC funcionará bien en los otros periodos, no será así en lo que a tiempos de espera medios se refiere, pudiendo llegar a ser estos en periodos como DP o MDT incluso el doble de los tiempos de espera medios del periodo UP.
Todo esto junto con nuevos horarios de trabajos (flexitime) y prohibiciones como la de fumar dentro del edificio que conllevan a una división del tiempo no basada en grupos exclusivos, hacen que las líneas de investigación se encaminen en muchos casos a tratar los distintos tipos de tráfico como uno solo, interfloor traffic donde los demás patrones serían casos particulares de éste.
6 DIMENSIÓN DEL PROBLEMA
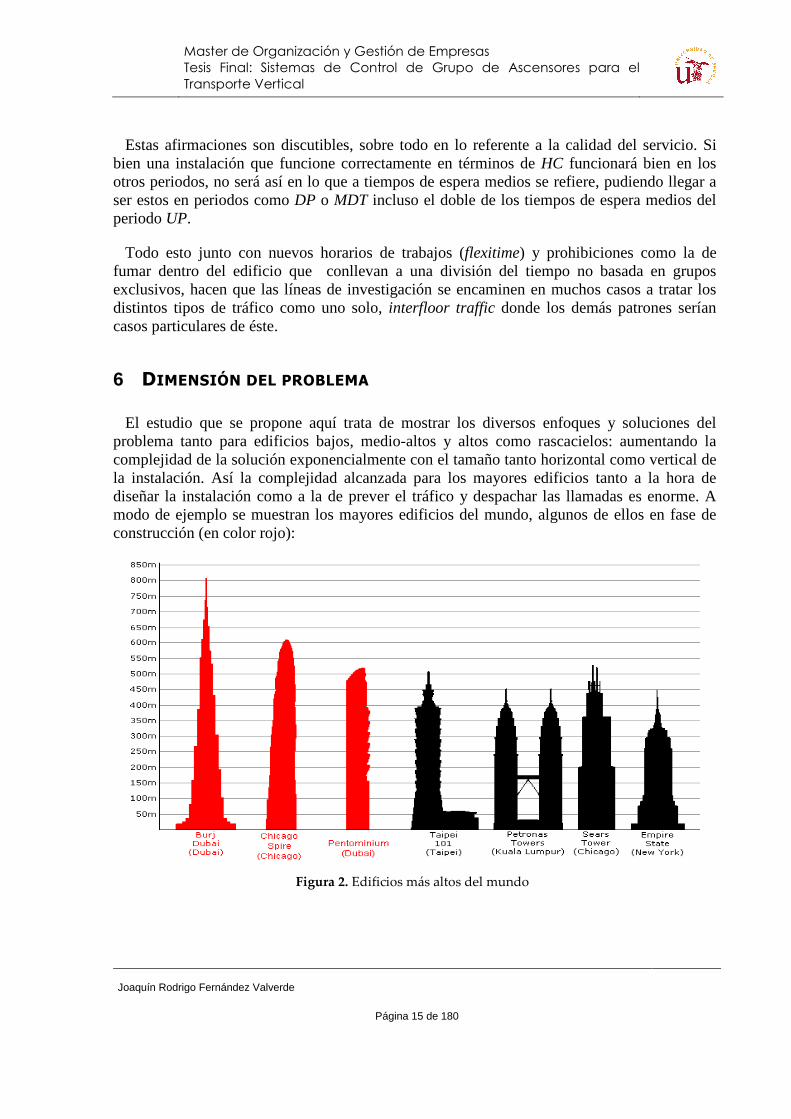
El estudio que se propone aquí trata de mostrar los diversos enfoques y soluciones del problema tanto para edificios bajos, medio-altos y altos como rascacielos: aumentando la complejidad de la solución exponencialmente con el tamaño tanto horizontal como vertical de la instalación. Así la complejidad alcanzada para los mayores edificios tanto a la hora de diseñar la instalación como a la de prever el tráfico y despachar las llamadas es enorme. A modo de ejemplo se muestran los mayores edificios del mundo, algunos de ellos en fase de construcción (en color rojo):
Figura 2. Edificios más altos del mundo
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 16 de 180
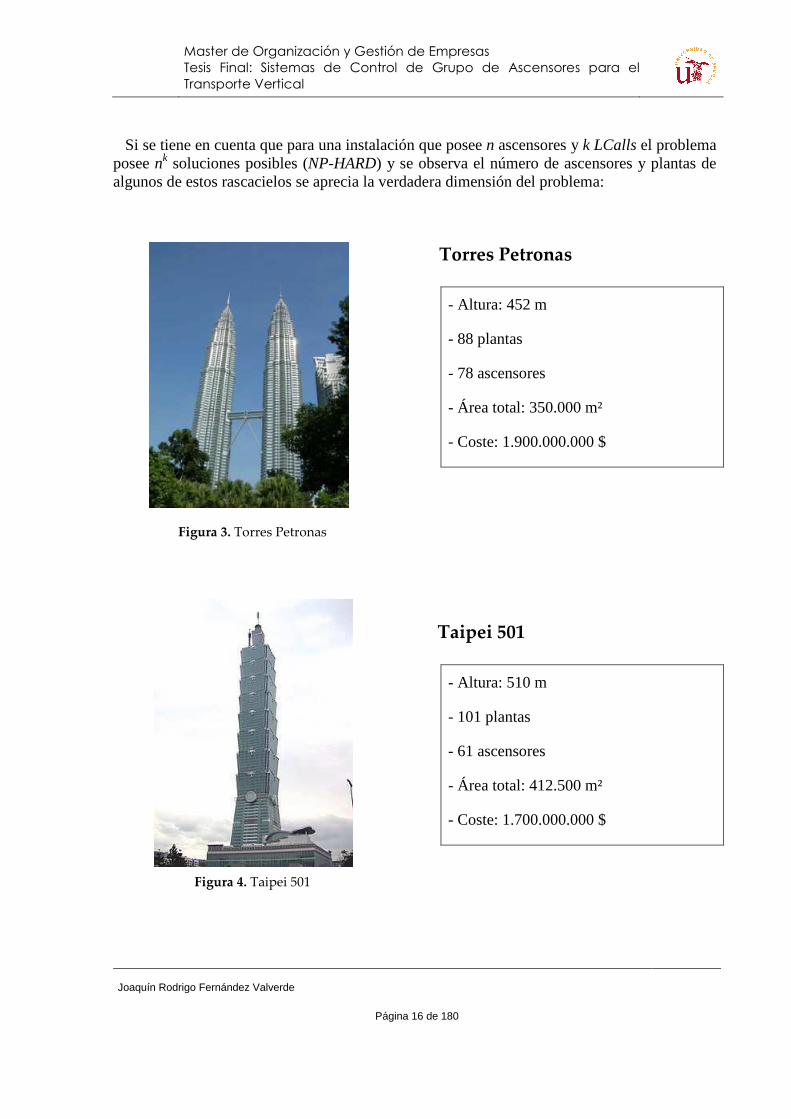
Si se tiene en cuenta que para una instalación que posee n ascensores y k LCalls el problema posee nk soluciones posibles (NP-HARD) y se observa el número de ascensores y plantas de algunos de estos rascacielos se aprecia la verdadera dimensión del problema:
Torres Petronas
Taipei 501
- Altura: 452 m
- 88 plantas
- 78 ascensores
- Área total: 350.000 m²
- Coste: 1.900.000.000 $
- Altura: 510 m
- 101 plantas
- 61 ascensores
- Área total: 412.500 m²
- Coste: 1.700.000.000 $
Figura 4. Taipei 501
Figura 3. Torres Petronas
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 17 de 180
Burj Bubai
Figura 5. Burj Dubai
7 ENERGÍA CONSUMIDA
Uno de los factores cada vez más influyente al considerar un sistema de control de grupo de ascensores es la energía consumida por el conjunto de cabinas, que puede llegar a representar entre el 2% y el 6% (Guía CIBSE, 2003) de la energía total consumida por el edificio.
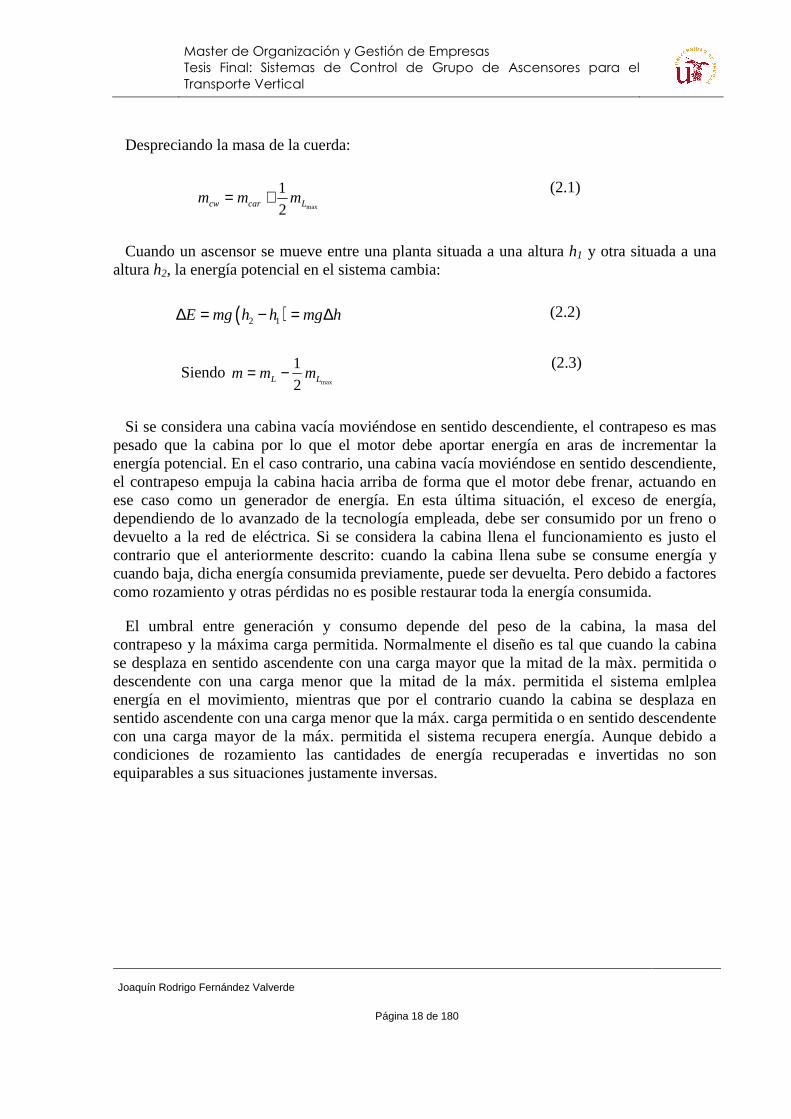
El sistema ascensor-remolque se diseña para que se encuentre en equilibrio cuando la carga de la cabina es la mitad de la carga máxima nominal y ésta se encuentra a la misma altura h que su contrapeso, como representa la Figura 6 9:
Figura 6: Sistema ascensor y contrapeso
- Altura: 818 m
- 205 plantas
- 53 ascensores
- Área total: 344.500 m²
- Coste: 1.800.000.000 $
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 18 de 180
Despreciando la masa de la cuerda:
max
1
2cw car Lm m m= + (2.1)
Cuando un ascensor se mueve entre una planta situada a una altura h1 y otra situada a una altura h2, la energía potencial en el sistema cambia:
( )2 1E mg h h mg h∆ = − = ∆ (2.2)
Siendo max
1
2L Lm m m= − (2.3)
Si se considera una cabina vacía moviéndose en sentido descendiente, el contrapeso es mas pesado que la cabina por lo que el motor debe aportar energía en aras de incrementar la energía potencial. En el caso contrario, una cabina vacía moviéndose en sentido descendiente, el contrapeso empuja la cabina hacia arriba de forma que el motor debe frenar, actuando en ese caso como un generador de energía. En esta última situación, el exceso de energía, dependiendo de lo avanzado de la tecnología empleada, debe ser consumido por un freno o devuelto a la red de eléctrica. Si se considera la cabina llena el funcionamiento es justo el contrario que el anteriormente descrito: cuando la cabina llena sube se consume energía y cuando baja, dicha energía consumida previamente, puede ser devuelta. Pero debido a factores como rozamiento y otras pérdidas no es posible restaurar toda la energía consumida.
El umbral entre generación y consumo depende del peso de la cabina, la masa del contrapeso y la máxima carga permitida. Normalmente el diseño es tal que cuando la cabina se desplaza en sentido ascendente con una carga mayor que la mitad de la màx. permitida o descendente con una carga menor que la mitad de la máx. permitida el sistema emlplea energía en el movimiento, mientras que por el contrario cuando la cabina se desplaza en sentido ascendente con una carga menor que la máx. carga permitida o en sentido descendente con una carga mayor de la máx. permitida el sistema recupera energía. Aunque debido a condiciones de rozamiento las cantidades de energía recuperadas e invertidas no son equiparables a sus situaciones justamente inversas.
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 19 de 180
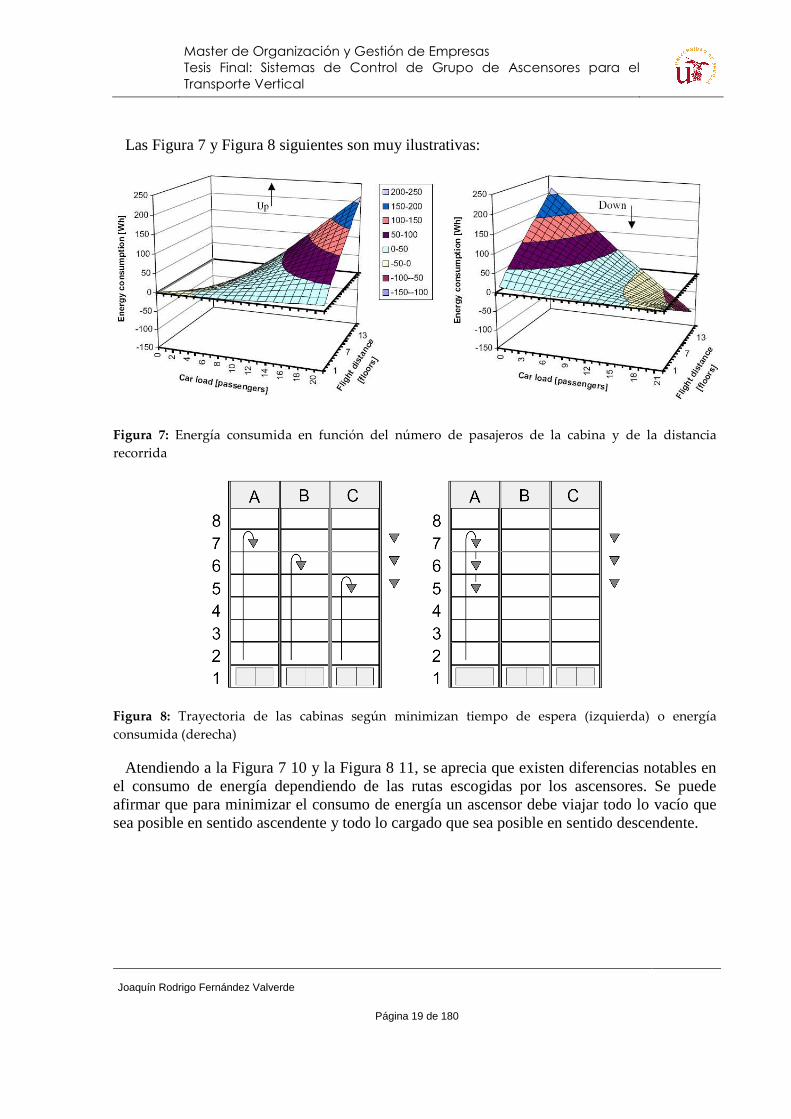
Las Figura 7 y Figura 8 siguientes son muy ilustrativas:
Figura 7: Energía consumida en función del número de pasajeros de la cabina y de la distancia
recorrida
Figura 8: Trayectoria de las cabinas según minimizan tiempo de espera (izquierda) o energía
consumida (derecha)
Atendiendo a la Figura 7 10 y la Figura 8 11, se aprecia que existen diferencias notables en el consumo de energía dependiendo de las rutas escogidas por los ascensores. Se puede afirmar que para minimizar el consumo de energía un ascensor debe viajar todo lo vacío que sea posible en sentido ascendente y todo lo cargado que sea posible en sentido descendente.
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 20 de 180
8 MODELO MATEMÁTICO PARA TRÁFICO ASCENDENTE MÁXIMO (UPPEAK
TRAFFIC)
En Barney (2003) se definen los siguientes parámetros que además de ser significativos para la cuestión forman parte del modelo matemático del problema basado en el periodo UP, y generalizandolos para otros periodos, también aparecen de forma conceptual en muchos métodos modernos basados en técnicas avanzadas de optimización.
8.1 Número medio de pasajeros que parten de la planta principal Si se representa la capacidad de cada cabina con las letras CC (Car Capacity), se define el número medio de pasajeros que parten de la planta principal (P) como:
P = (80/100) x CC (3.1)
La cabina raramente alcanza el límite de ocupación máximo, se supone bastante llena, entorno al 80% de su capacidad. Este es un porcentaje basado en la experiencia y que pocos diseñadores o estudios cuestionan. Tiene en cuenta como fondo factores sicológicos humanos como el espacio personal subjetivo que rodea a cada persona y el carácter inherente en uppeak (UP) de inicio de la jornada laboral.
También es interesante destacar que P no es el 80% de la capacidad de carga en kilos de la cabina, sino el 80% del total de pasajeros que caben dentro del ascensor atendiendo a un espacio individual de 0,21m2 para cada pasajero. Al carecerse del valor del área de la cabina, se utiliza un valor de P en los cálculos igual al 80% del valor del número de personas máximo que caben en la cabina suponiendo un peso medio de estas de 70Kg. El error cometido al efectuar los cálculos de esta manera puede considerarse pequeño.
8.2 Número medio de paradas por cada viaje para un solo ascensor
El número medio de paradas por cada viaje para un solo ascensor se representa con la letra S (stops), su cálculo matemático depende del patrón de llegadas de pasajeros que se considere. Es habitual suponer un patrón restrictivo de llegadas con una función de distribución de probabilidad (pdf) rectangular, en cuyo caso el número medio de paradas sería:
−−=P
N
NNS
11
(3.2)
N: número de plantas del edificio.
8.3 Planta media servida a mayor altitud
La planta media servida a mayor altitud se representa con la letra H (Highest Reversal Floor). Al igual que S también es función del número de plantas y de P. Suponiendo
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 21 de 180
distribución uniforme en las demandas de cada planta, esto es, plantas con el mismo número de trabajadores y una función densidad de probabilidad (pdf) de las llegadas rectangular:
∑−
=
−= 1
1
N
i
P
N
iNH
(3.3)
8.4 Tiempo medio por ronda
RTT (Round Trip Time) es el tiempo de medio que emplea cada ascensor desde que abre las puertas vacío en la planta principal (MT) hasta que vuelve a abrirlas otra vez vacío en la MT después de haber despachado a todos los pasajeros. Según Barney y Dos santos (1977):
RTT = 2Htv + (S+1)ts + 2Ptp (3.1)
tv es el tiempo que tarda el ascensor en atravesar el espacio de una planta a velocidad constante.
ts tiempo consumido por parada, es igual al necesario para abrir y cerrar las puertas del ascensor más el tiempo empleado por el ascensor parado en alcanzar la siguiente planta adyacente suponiendo que se alcanza la velocidad nominal (tflight) menos el tiempo necesitado para recorrer dos plantas contiguas a velocidad constante.
ts=to+ tc+ t flight(1) - tv (3.5)
tp es el tiempo medio que tarda un pasajero en entrar al ascensor. Este parámetro es muy difícil de medir y poco fiable.
L: Número total de ascensores del grupo que se considera.
Para reducir el RTT se intentan reducir los parámetros tv, ts y tp dependientes del tiempo y los parámetros H, S y P no dependientes del tiempo. Los primeros pueden ser mejorados en base a la tecnología usada. En cambio, el parámetro P viene dado con el funcionamiento del sistema mientras que los parámetros H y S, utilizando técnicas de control avanzado, pueden optimizarse.
También es necesario resaltar que se ha supuesto en la definición de RTT que el ascensor alcanza su velocidad punta siempre, aunque realice un viaje del tamaño de una sola planta, pero para casos en los que el ascensor necesite más espacio de aceleración para alcanzar su velocidad máxima es necesario reescribir la fórmula.
8.5 Tiempo medio de llegada de un ascensor a la planta principal Se suele representar con la palabra INTERVAL o INT y se calcula como:
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 22 de 180
INT = RTT/L (3.6)
8.6 Capacidad de solvencia del sistema
Se define la capacidad de solvencia HC (Handling Capacity) del periodo uppeak (UP) como la cantidad de personas, medidas en porcentaje de la población total del edificio, que el sistema es capaz transportar hasta su destino en los cinco minutos (300 seg.) de duración del intervalo.
Es importante reseñar, al hablar de población total del edificio, que los trabajadores de la planta baja o planta principal (main terminal) no forman parte de la población total que se tiene en cuenta en el cálculo del desarrollo del transporte vertical, pues no van a tomar parte en él.
El Greater London Council (fecha desconocida) considera que aproximadamente alrededor del 84% de la población total del edificio llega durantes los cinco minutos en los que se define el periodo uppeak. Factores como absentismos, vacaciones, enfermedades, trabajo a distancia o llegadas fuera del periodo derivan en una población real del edificio alrededor de un 15% ó 20% menor que la población nominal.
xPxLRTT
UPPHC300=
(3.7)
Donde L es el número de ascensores del sistema y P es el número de personas que utilizan un ascensor en cada viaje.
Para calcular la capacidad de solvencia de todo el edificio es necesario tener en cuenta también la capacidad de transporte que proporcionan las escaleras así como el porcentaje de la población total del edificio que hará uso de ellas. Teniendo la anchura de estas y la velocidad estimada media de los pasajeros se puede resolver si las escaleras serán capaces de transportar la cantidad de usuarios requeridos a las plantas especificadas.
8.7 Tiempo medio de espera por pasajero
El tiempo de espera medio por pasajero AWT (Average Waiting Time) representa el tiempo medio que un pasajero espera en la planta principal desde que su llamada es registrada hasta que comienzan a abrir las puertas de la cabina. Mide la calidad del servicio ofrecido al pasajero durante los 5 min. del periodo uppeak. Depende fuertemente de la carga del ascensor (P), así para una carga de entre el 50% y el 80% el AWT sigue aproximadamente la ecuación (Barney, 2003):
( )[ ]INTCCPAWT 277.08.14.0 −+= (3.8)
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 23 de 180
Con CC expresada como kilogramos máximos permitidos.
Para una carga normal de uppeak del 80% AWT se corresponde con el 85% de INTERVAL, para una del 100% en teoría sería infinito.
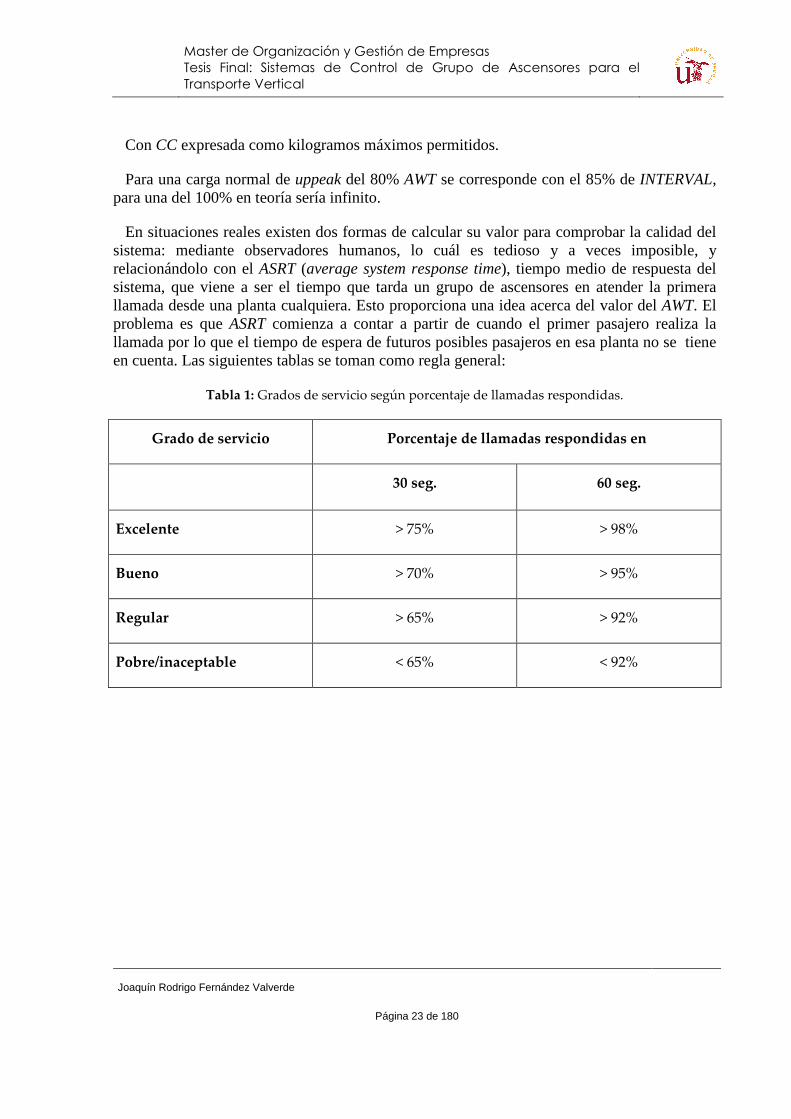
En situaciones reales existen dos formas de calcular su valor para comprobar la calidad del sistema: mediante observadores humanos, lo cuál es tedioso y a veces imposible, y relacionándolo con el ASRT (average system response time), tiempo medio de respuesta del sistema, que viene a ser el tiempo que tarda un grupo de ascensores en atender la primera llamada desde una planta cualquiera. Esto proporciona una idea acerca del valor del AWT. El problema es que ASRT comienza a contar a partir de cuando el primer pasajero realiza la llamada por lo que el tiempo de espera de futuros posibles pasajeros en esa planta no se tiene en cuenta. Las siguientes tablas se toman como regla general:
Tabla 1: Grados de servicio según porcentaje de llamadas respondidas.
Grado de servicio Porcentaje de llamadas respondidas en
30 seg. 60 seg.
Excelente > 75% > 98%
Bueno > 70% > 95%
Regular > 65% > 92%
Pobre/inaceptable < 65% < 92%
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 24 de 180
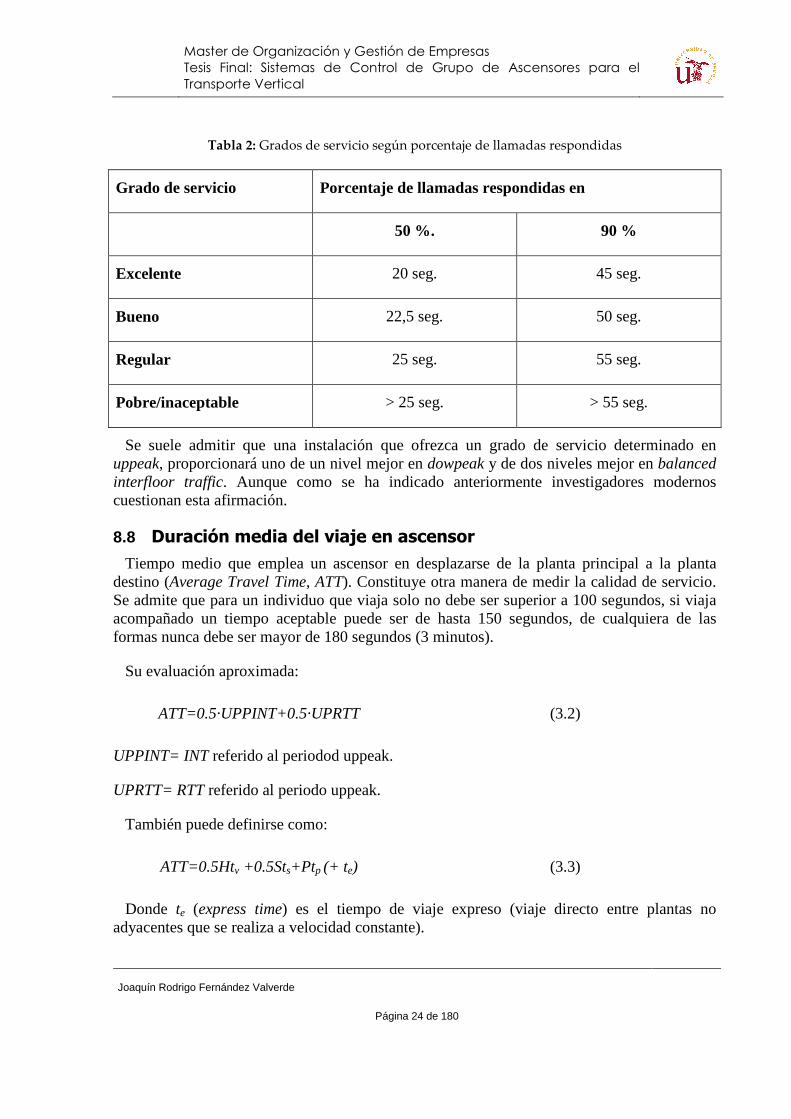
Tabla 2: Grados de servicio según porcentaje de llamadas respondidas
Grado de servicio Porcentaje de llamadas respondidas en
50 %. 90 %
Excelente 20 seg. 45 seg.
Bueno 22,5 seg. 50 seg.
Regular 25 seg. 55 seg.
Pobre/inaceptable > 25 seg. > 55 seg.
Se suele admitir que una instalación que ofrezca un grado de servicio determinado en uppeak, proporcionará uno de un nivel mejor en dowpeak y de dos niveles mejor en balanced interfloor traffic. Aunque como se ha indicado anteriormente investigadores modernos cuestionan esta afirmación.
8.8 Duración media del viaje en ascensor
Tiempo medio que emplea un ascensor en desplazarse de la planta principal a la planta destino (Average Travel Time, ATT). Constituye otra manera de medir la calidad de servicio. Se admite que para un individuo que viaja solo no debe ser superior a 100 segundos, si viaja acompañado un tiempo aceptable puede ser de hasta 150 segundos, de cualquiera de las formas nunca debe ser mayor de 180 segundos (3 minutos).
Su evaluación aproximada:
ATT=0.5·UPPINT+0.5·UPRTT (3.2)
UPPINT= INT referido al periodod uppeak.
UPRTT= RTT referido al periodo uppeak.
También puede definirse como:
ATT=0.5Htv +0.5Sts+Ptp (+ te) (3.3)
Donde te (express time) es el tiempo de viaje expreso (viaje directo entre plantas no adyacentes que se realiza a velocidad constante).
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 25 de 180
El cálculo que aquí se ha representado de ATT es el clásico habitual aceptado universalmente, sin embargo algunos autores modernos como So y Suen (2002) proponen el siguiente:
( ) psv PttSHtS
SATT +++
+= 15.01
5.0 (3.4)
Cuando S >> 1 se obtiene la fórmula anterior clásica.
8.9 Duración media de todo el viaje
Habiendo definido previamente AWT y ATT, se puede definir el tiempo medio de viaje por pasajero (Average Journey Time, AJT) como:
AJT=AWT+ATT (3.5)
Si existiesen instalaciones subterráneas en el edificio que transportasen sólo hasta la planta principal a los usuarios, entonces habría que calcular de manera separada los AJT de los dos viajes, primero el que lleva hasta la planta principal y segundo el que conduce a la planta destino ya que un solo AJT común no sería representativo del sistema. Por extensión, lo mismo se aplica los parámetros AWT y ATT.
Tabla 3: Tiempos de espera medios objetivos.
Tiempo Objetivo Se considera pobre
AWT < 20 seg. > 25seg.
ATT < 60 seg. > 70 seg.
AJT < 80 seg. > 90 seg.
8.10 Tiempo medio de respuesta del sistema
El tiempo medio de respuesta del sistema (Average System Response Time, ASRT) se define como la media de los tiempos medios de respuesta de cada ascensor del sistema, esto es, el tiempo medio que tardan en atender a la primera llamada de una planta. Como el tiempo de espera de cada pasajero constituye un dato de difícil medición, se suele emplear el ASRT para obtener una idea aproximada de éste.
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 26 de 180
8.11 Tiempo medio de viaje de los pasajeros
El tiempo medio de viaje de los pasajeros (Passenger Average Journey Time, PAJT) como su propio nombre indica no es más que el tiempo medio que estos están en la cabina más el tiempo medio que esperan antes de poder entrar en ella, es decir el tiempo total medio que necesitan para llegar a su destino.
8.12 Relación entre parámetros Atendiendo a las fórmulas de los parámetros se pueden obtener dos conclusiones: interesa un RTT los mas pequeño posible para minimizar HC y AWT, y segundo, al incrementar el numero medio de pasajeros que parten de la planta baja, se incrementa la capacidad de solvencia HC pero se empeoran los tiempos de espera AWT, y por consiguiente AJT. Por lo tanto llegado a un punto óptimo el diseño, no se puede mejorar un parámetro sin empeorar el otro, es decir, no se puede mejorar la cantidad de servicio sin empeorar la calidad de servicio y viceversa.
8.13 Limitaciones del modelo matemático
Cuando el modelo matemático se implementa en el mundo real, surgen errores en los valores esperados de los parámetros. Debido a la necesidad de caracterizar ciertos comportamientos, se toman como reglas lo que no son más que hipótesis o suposiciones. Esto conlleva limitaciones en el modelo que producen funcionamientos inesperados del sistema de transporte vertical real. Algunas de estas suposiciones y limitaciones ya han sido comentadas en apartados previos. De esta manera, es necesario tener en cuenta para todo modelo las siguientes consideraciones:
� Se define LCE (lowest call exress) como la planta media más baja que se comienza a servir. Si esta es muy baja, por ejemplo la planta adyacente a la planta baja, entonces el ascensor no alcanza la velocidad punta nominal. Esto introduce un error en el cálculo de RTT que en principio se debería tener en cuenta, sin embargo su efecto en la ecuación es de tercer orden por lo que no resulta necesario incluirlo en el modelo.
� Las distribuciones de plantas pueden no ser uniformes y las plantas pueden presentar distinta atracción para los pasajeros, esto se refleja en la modificación de los parámetros H y S que se señaló. Suponer H=N para edificios altos y H=N-1 para medianos y bajos como se hace en muchos diseños, puede suponer un incremento de RTT de hasta el 10%.
� Las separación entre plantas puede no ser constante y el tiempo de vuelo (flight time) puede no ser lineal, siendo necesario en ese caso recalcular la ecuación del RTT.
Existen otras irregularidades que no pueden ser representadas de forma exacta por un modelo matemático como:
� Que el perfil del tráfico no sea ideal (uppeak puro) y que los ascensores no se encuentran en la planta baja al comienzo del periodo. Los ascensores antes del periodo uppeak suelen
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 27 de 180
encontrarse dispersos por el edificio, lo ideal sería poder detectar la condición uppeak 5 minutos antes de que se produjera.
� El funcionamiento del sistema de control y supervisión no puede ser ideal.
� Un mal comportamiento de los pasajeros conlleva una degradación del sistema. Puede producir aumentos del RTT de hasta el 10% (por ejemplo individuos jugando con las puertas).
� Para aumentar el rendimiento del sistema y evitar el fenómeno conocido como bunching (aglomeración), se puede emplear como técnica la espera de un ascensor con las puertas cerradas en la planta baja mientras otro carga. De esta manera no saldrán los dos al mismo tiempo (esto tendría un efecto perjudicial para el AWT), sin embargo es imposible predecir matemáticamente cuando se producirá la coincidencia, con lo cuál el tiempo de espera del ascensor en la planta baja no esta contabilizado en las ecuaciones.
En teoría, siempre que todos los pasajeros que esperan en la planta baja puedan entrar en los ascensores y no se deje ninguno atrás, el fenómeno bunching empeora algo los tiempos de espera de los pasajeros pero no la capacidad (HC) ni el tiempo INTERVAL del sistema que permanece constante. Si todos los pasajeros que esperan en la planta baja no pueden subirse a un ascensor entonces la capacidad del sistema comienza a degradarse mucho.
La forma de caracterizar la aglomeración consiste en medir el coeficiente 0.5INT/WT. Su valor se extiende desde cero (no existe aglomeración) hasta uno (la aglomeración es total). Aumenta con el número de ascensores y con la carga de las cabinas. De manera ilustrativa, para un factor de carga del 50% el ratio suele valer casi siempre uno, y para el habitual del 80% alrededor de 0.6.
Otra manera de medirlo consiste en calcular la diferencia en tiempo real entre la llegada del ascensor i y el ascensor siguiente i+1 a la planta principal y estimar la diferencia con el tiempo ideal RTT/L.
El fenómeno de aglomeración (bunching) no se corrige por si mismo, al contrario, tiene tendencia a empeorar cada vez más. Existen controladores como el ACA (Adaptative Hall Allocation) que mediante el uso de paneles de preselección de llamada lo previene por definición.
� Para no partir solos sin carga, los ascensores mantienen las puertas abiertas un mínimo de tiempo conocido como tiempo de despacho (dispatch interval) y tiempo de carga (loading interval). Estos tiempos son menores que los necesarios para que el 80% de la capacidad de la cabina se llene o se vacíe en condiciones normales, pero si en una planta se apeasen bastantes menos pasajeros que el 80% de la capacidad o en la planta baja subiesen bastantes menos que el 80%, el ascensor se mantendría parado con las puertas abiertas esperando. Esto introduce desajustes imposibles de predecir matemáticamente.
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 28 de 180
� Es típico suponer P como el 80% de la capacidad de carga de la cabina, por encima de este valor el sistema degrada rápidamente su funcionamiento. Sin embargo se ha demostrado que en ocasiones el sistema alcanza su mejor grado de funcionamiento con P igual al 60% de la capacidad de carga. Al-Sharif (1992) propone un método alternativo (método S-P inverso) para calcular P basado en el número medio de paradas que se realiza por cabina y por viaje:
−
−
=
N
NN
SN
P1
ln
ln (3.13)
� Una definición incorrecta de cabina llena puede provocar que el ascensor, no cabiendo nadie más, no obvie una llamada realizada desde una planta (load bypass) y se detenga en ella cuando ningún pasajero puede entrar. El funcionamiento del sistema es muy defectuoso en estos casos.
� En los cálculos no se refleja la llegada real de los pasajeros, si las estadísticas mostrasen una gran varianza sería necesario recalcular RTT utilizando técnicas de simulación apropiadas.
Lo normal es que estas restricciones influyan poco en el RTT, se estima (Barney, 2003) que del orden del 1% al 2% la mayoría. Es por esto que los modelos matemáticos, aunque inexactos, funcionan de manera correcta.
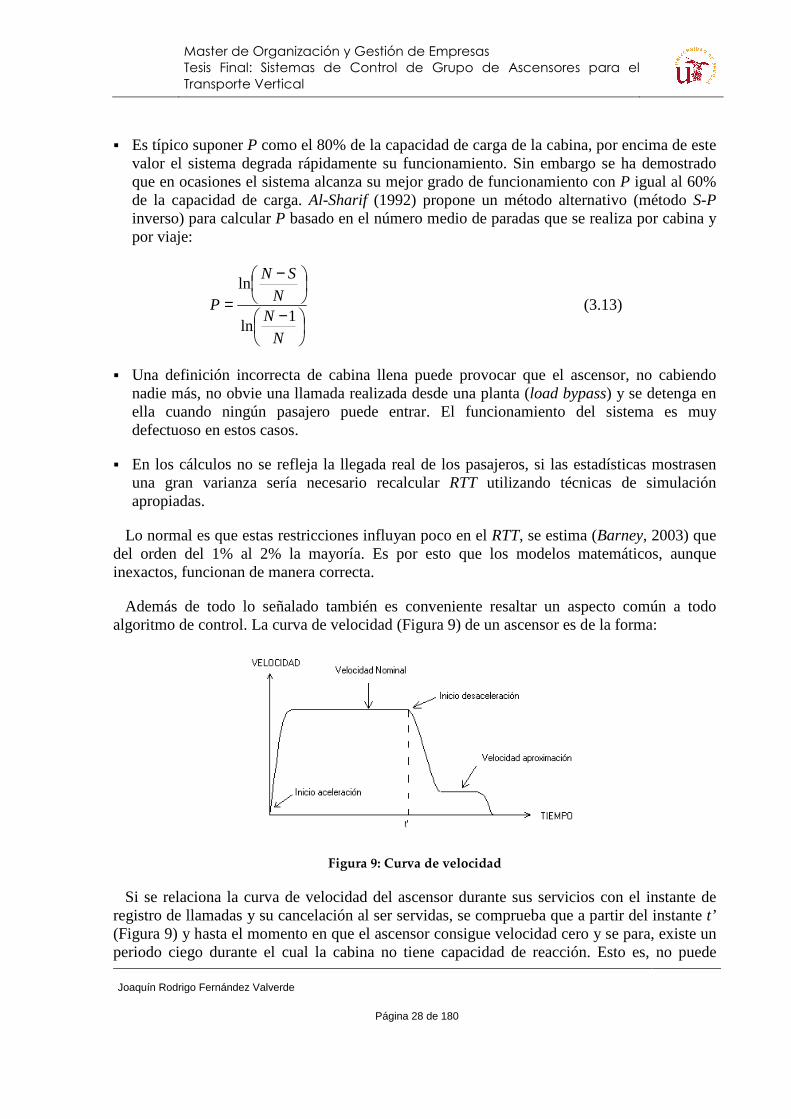
Además de todo lo señalado también es conveniente resaltar un aspecto común a todo algoritmo de control. La curva de velocidad (Figura 9) de un ascensor es de la forma:
Figura 9: Curva de velocidad
Si se relaciona la curva de velocidad del ascensor durante sus servicios con el instante de registro de llamadas y su cancelación al ser servidas, se comprueba que a partir del instante t’ (Figura 9) y hasta el momento en que el ascensor consigue velocidad cero y se para, existe un periodo ciego durante el cual la cabina no tiene capacidad de reacción. Esto es, no puede
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 29 de 180
reaccionar mecánicamente ante una orden instantánea de servicio de llamada. En cualquier caso, otras llamadas pueden seguir registrándose y asignándose durante este periodo.
8.14 Importancia del modelo uppeak
Todos los parámetros de una instalación son diseñados referidos al intervalo de tiempo uppeak ya que según la teoría clásica (Barney, 2003) si el sistema satisface los requisitos de cantidad (HC) en el transporte durante el periodo de tráfico Uppeak, también lo hará durante los restantes periodos de forma que existe una capacidad inherente extra implícita en todos los sistemas para los otros intervalo de tiempo tales que:
� Downpeak Handling Capacity = 1.6 Uppeak HC
� Interfloor Handling Capacity = 1.6 Uppeak HC
� Lunch Traffic = 1.3 Uppeak HC
Se aprecia que el periodo uppeak es el más exigente en lo que respecta a cantidad de transporte (HC) y que al asegurarse ésta para dicho periodo también se asegura de forma colateral para los otros. Pero esto mismo no ocurre con la calidad de servicio (tiempos de espera) que es más exigente en periodos como lunchpeak o downpeak de manera que al formularse el problema como uno exclusivo de capacidad se menosprecia la calidad del servicio en su detrimento.
8.15 Situaciones específicas Cada instalación posee su topología y características propias. Existe un gran número de particularidades y excepciones en lo relativo a instalaciones de ascensores por lo que antes de aplicar el método de resolución matemático se deben fijar bien todos los detalles para emplear las ecuaciones que mejor caractericen el sistema.
8.15.1 Tipos de ascensores
Aparte de los ascensores convencionales existen otros tipos de ascensores que toman parte en el transporte vertical:
� “Lanzaderas” (Shuttle lifts): Cabinas que transportan pasajeros directamente de la planta baja a una planta vestíbulo (lobby) en edificios muy altos desde donde parten otros grupos de ascensores. Para estos ascensores S y H suelen valer 1, de manera que el parámetro RTT se calcula en estos casos:
RTT=2Tperformance+2Ptptp (3.14)
tp suele ser menor que en otros casos porque estos ascensores son amplios y la gente puede entrar más rápido. Además el hecho casi seguro de tener que coger otro ascensor es un factor sicológico que le induce a ir algo más deprisa.

Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 30 de 180
� Ascensores de doble cabina (double decker lifts): Situados en grandes rascacielos, constan de dos cabinas enganchadas para transportar personas, realizando por ello paradas entre plantas adyacentes siempre. Esto obliga a modificar algunos de los parámetros usuales:
En estos casos el valor de H se calcula de la misma manera pero Sd (double-decker) queda de la siguiente forma:
−−=P
d N
NNS
21
1 (3.15)
No obstante si 2P es grande como suele serlo siempre en estos ascensores, la fórmula se reduce a la siguiente ecuación en función de S:
−=N
SSSd 2 (3.16)
RTT queda, después del desarrollo matemático:
ppsv tN
SPPtt
N
SSHtRTT
−++
+
−+= 2122 (3.17)
Si el número de paradas es muy grande S tiende a N y el término (2 – S/N) queda como la unidad:
Los parámetros tv y tf cambian su definición al espacio de dos plantas y N es la mitad de las 2N plantas servidas.
Sólo hay unos 34 ascensores de este tipo en todo el mundo pero situados en edificios de gran importancia (las Torres Petronas, el antiguo World Trade Center...). El cálculo de los parámetros sigue siendo sencillo pero su control y supervisión requiere atención experta.
� Ascensores de incendios, montacargas y ascensores de minusválidos: En muchos edificios la gente prefiere usarlos en lugar de los convencionales por motivos de ubicación. Suelen ser más lentos y con menos capacidad por lo que poseen un RTT distinto de los demás.
� Ascensores exteriores con cristaleras: Suelen estar pensados para los turistas, su velocidad es lenta y además a esto hay que sumarle un tp mayor, pues el pasajero camina con relativa tranquilidad.
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 31 de 180
8.15.2 Edificios altos modernos
Se suelen considerar edificios altos los que constan de unas veinte plantas o más. En la actualidad algunas técnicas para este tipo de edificios se han convertido en reglas generales como el uso de grupos de ascensores que sirven zonas concretas (conjunto de plantas adyacentes, stacked zones) o la habilitación de plantas vestíbulo adicionales (además de la planta principal) necesarias para el acceso a las zonas elevadas. También es posible la instalación de lanzaderas (shuttles) para acceder de manera más rápida a dichas plantas vestíbulo (sky lobbies).
Se estima (Barney, 2003) para edificios de unas sesenta plantas, que es necesario al menos cuatro grupos de ascensores (que sirven a cuatro zonas respectivas). El número de ascensores de cada grupo nunca debe ser superior a ocho (cuatro enfrente de otros cuatro) y tampoco debe ser un número impar mayor o igual que cinco, en la práctica esto conlleva comportamientos extraños.
Los edificios de unas ochenta plantas deben poder servirse de manera aceptable según los criterios con cuatro grupos de ascensores de doble cabina.
Para edificios de más de ochenta es necesario la habilitación de una planta vestíbulo, con ella se pueden servir desde unas ciento veinte plantas a ciento sesenta. Si se quieren servir edificios enormes desde unas ciento ochenta a doscientas cuarenta plantas, es necesario habilitar otra planta vestíbulo. A modo de referencia, el edificio más alto actualmente son las Torres Petronas situadas en Malasia (452 metros) que posee unas ochenta plantas.
En lo que respecta a la planta del edificio, no se recomienda incluir en el diseño distintas entradas a distintos niveles si no se puede conducir a los pasajeros hacia una planta principal común porque produciría un efecto negativo sobre el sistema la existencia de más de una planta MT (Pearce,1995). En el caso de existir una sola MT pero con varias entradas, sería necesario calcular el porcentaje de pasajeros que entran por cada entrada para caracterizar el funcionamiento.
Un vestíbulo estrecho con ascensores rodeados de muros gruesos produce reducciones significativas en el tp de hasta un 10% (Barney, 2003).
Por último es necesario resaltar que diseños que cumplan las especificaciones por estrecho margen de diseño, no funcionarán bien en cuanto se presente algún percance como una cabina estropeada, etc...
8.15.3 Instalaciones con sótano
La existencia de plantas sótano afecta de manera considerable a la capacidad del sistema, su comportamiento se deteriora mucho si las cabinas llegan llenas de pasajeros a la planta baja en periodo uppeak o ni si quiera paran en la planta baja por subir ya cargadas del sótano.
Según Strakosch (1967) existen solo dos formas aceptables de gestionar el tráfico del sótano: la primera consiste en que todos los ascensores puedan atender las llamadas del
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 32 de 180
sótano. Esto degrada la calidad y la capacidad del sistema por lo que no se recomienda para edificios con más de una o dos plantas de sótano, sobre todo en edificios altos donde algunos grupos de ascensores sirven específicamente las plantas más altas. Mediante controladores modernos se pueden diseñar sistemas versátiles que limiten el acceso a los sótanos en periodos donde la congestión sea mayor (uppeak o downpeak) y permitir el total acceso a éstos en periodos menos problemáticos como interfloor traffic.
Strakosch no recomienda el acceso al sótano sólo mediante algunos ascensores determinados y paneles con botones de servicio exclusivos al sótano. La razón, los usuarios llamarán a todos los ascensores y se montarán en el primero que llegue no importándoles si es el que tiene como destino el sótano o no. Si no lo es, se bajarán en la planta baja y tomarán las escaleras. De esta manera alguno de los otros ascensores realizará paradas extras inútiles posteriormente.
Barney (1993) afirma que cuando los ascensores están conectados con todas las plantas del sótano pueden llegar a existir hasta dos paradas extra (paradas que de no existir el sótano no se llevarían a cabo), esto redunda en un incremento considerable del RTT que va desde un 10% a un 20% aproximadamente para edificios de unas quince plantas.
La segunda forma consistiría en la implementación de un servicio exclusivo que sirviese sólo las plantas sótano y la planta principal (si sólo existiese un sótano esto sería equivalente a una lanzadera sótano-planta baja), en este caso se realizarían los cálculos habituales por separado para los ascensores sótano-planta baja y los planta baja-plantas superiores.
Para modelar el transporte, teniendo en cuenta el sótano, es necesario estimar la llegada de pasajeros a éste calculando la demanda del parking y la tasa de llegadas al aparcamiento (considerando la velocidad de los vehículos y la capacidad y distancia de la rampa de entrada).
También es necesario, en el caso de la primera implementación, modelar la ecuación del RTT y algunos parámetros característicos: N debe tener en cuenta las plantas del sótano y S y H se obtienen suponiendo que cuando los pasajeros entran al ascensor en realidad son pasajeros que salen del ascensor y que ya han llegado al destino. Este planteamiento formulado por primera vez por Nahon (1990) y corroborado por Barney y Pearce (2001) se traduce en un nuevo RTT:
RTT = 2Htv + (S+1)ts + 2Ptp + 2HMtvm + SMtsm
� HM es la planta media más baja servida (average lowest reversal floor).
� tvm tiempo que tarda el ascensor en atravesar una planta de sótano a velocidad constante.
� SM el número de paradas medio por debajo de la planta principal.
� tsm es el tiempo medio de parada por debajo de la planta baja.
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 33 de 180
Los dos últimos términos representan la penalización en el tiempo debida a la existencia de sótanos.
Para un edificio medio que posea de una a cinco plantas de sótano y una demanda de sótano de alrededor de un 10% a un 20% de su población total, la existencia de plantas subterráneas supone una degradación de la capacidad (HC) de aproximadamente un 7% a un 18% del valor nominal que tendría caso de no existir el sótano.
También se ve afectado el tiempo medio de espera por pasajero debido a que las cabinas no se presentan vacías en la planta baja. Para caracterizar el funcionamiento correctamente se debe estimar el porcentaje de la capacidad de la cabina (CC) ocupado de media cuando los ascensores suben del sótano.
9 MODELOS PARA OTROS PERIODOS
9.1 Modelo matemático para máximo tráfico descendiente (Downpeak)
No existe acuerdo acerca de la duración del intervalo downpeak ni acerca del porcentaje de la población que abandona el edificio durante el periodo. Se suelen aceptar una duración de unos 10 minutos aproximadamente aunque algunos autores afirman que dura menos tiempo, de 7 a 9 minutos. Respecto al porcentaje de la población, puede ser hasta un 40% ó 50% de la población total y durante los 5 minutos de tráfico downpeak más elevado hasta un 25% de la población puede abandonar el edificio. Como se puede apreciar existe poco consenso al respecto.
Lo que si esta claro es que los ascensores se llenan más que en el periodo downpeak y que los parámetros Hd y Sd (definidos de la misma manera que en el periodo uppeak pero referidos al periodo dowpeak) son menores que los respectivos del periodo uppeak H y S. Esto conlleva a un RTTd menor que el RTT calculado para el periodo uppeak y por consiguiente a la conclusión de que la solvencia del sistema es mayor en downpeak que durante uppeak. Se cifra en apróximadamente en un 50% a un 60% mayor la solvencia del periodo downpeak (DPPHC), lo cual es considerable.
El efecto negativo de unos ascensores más cargados, como se explicó anteriormente, son unos tiempos medios de espera mayores que pueden llegar incluso a doblar los tiempos medios de espera del periodo uppeak.
Uno de los problemas más importantes de este periodo consiste en la dificultad de ofrecer un servicio adecuado en las plantas inferiores del edificio. Debido a que los ascensores comienzan atender las llamadas realizadas desde una planta (LCs) desde la llamada situada a mayor altitud, los ascensores pronto se llenan no pudiendo responder a la demanda de las plantas situadas en los niveles más bajos. Para contrarrestar esta tendencia se suelen emplear una técnica de round robin consistente en servir a todas las plantas antes de servir alguna
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 34 de 180
planta por segunda vez. Las técnicas de sectorización son las más adecuadas para este periodo.
Los parámetros que definen este periodo son evaluados en función de los parámetros del periodo uppeak del mismo sistema. Es importante tener en cuenta que las mejoras llevadas a cabo mediante controladores con el fin de aumentar la solvencia en el periodo uppeak no pueden aplicarse en el periodo downpeak. Debido a ello cuando la solvencia o el tiempo media de espera referidos al periodo uppeak (UPPHC o UPAWT) participen en la definición de algún parámetro, es necesario tener en cuenta que representan la solvencia o el tiempo medio sin tener en cuenta mejoras introducidas por sistemas de control como ACA o algún tipo de sectorización que no sea útil en downpeak.
También es importante destacar que los resultados de los cálculos que se muestran en esta sección suponen una distribución uniforme de la población a lo largo de las plantas y que además éstas poseen todas el mismo nivel de prioridad. Si esto no fuera así sería necesario emplear técnicas de simulación.
Los parámetros referidos a este periodo no se encuentran caracterizados de forma precisa y existen criterios dispares, de manera algo aproximada Strakosch (1967) cifra:
Sd=0.75S y Hd=N (4.1)
Mientras que Zimmermann (1973) afirma:
Sd=N/L y Hd=0.75N (4.2)
Como se puede apreciar no existe consenso, ninguna de las dos afirmaciones tienen apenas fundamento matemático y están basadas más bien en la experiencia.
El parámetro RTTd se calcula:
RTTd = 2Hdtv + (Sd+1)ts + 2ACtp (4.3)
Donde AC representa toda la capacidad disponible (available capacity), las cabinas se suponen llenas al máximo.
La medida de la calidad del sistema la confiere el parámetro tiempo de servicio de planta (floor interval), que representa el tiempo medio de espera del primer pasajero que solicita el servicio:
FINT = N/Sd · DNPINT (4.4)
DNPINT representa el valor del tiempo INT del periodo downpeak. Strakosch (1967) afirma que nunca debe superar el minuto (“el servicio debe estar disponible en cada planta cada intervalo de tiempo no mayor de 60 segundos”). Debido a que el parámetro FINT es un tiempo máximo (representa el valor medio sólo del primer pasajero, que es el que sufre la
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 35 de 180
espera mayor) y no medio, resulta muy difícil cumplir con lo propuesto. Normalmente se toma como meta razonable que el tiempo medio de espera AWT no supere el minuto.
Otra manera de contrarrestar el servicio defectuoso proporcionado a las plantas bajas consiste en dividir todas las plantas en un número de sectores igual al número de ascensores, en este caso el tiempo de servicio de planta (Floor Interval, FINT) vale:
FINT = L · DNINT (4.5)
Se define según Barney y Dos Santos (1977) la demanda en el periodo downpeak en función de la demanda y de la capacidad de solvencia en el periodo uppeak (UPHC es calculada de la manera habitual suponiendo una ocupación de las cabinas del 80%):
%100xUPPHC
λα = (4.6)
Si se atiende a lo expuesto anteriormente por Strakosch (1967) y Zimmermann (1973) el valor deα se extiende desde un 80% hasta un 150% del valor de UPPHC.
Si se atienden a valores empíricos de Hd y Sd y no a los enunciados anteriormente, Schroeder (1984) afirma que:
Sd=0.5S y Hd=0.5N + 0.5 Sd (4.7)
De existir sectorización Hd valdría:
Hd=0.5N (4.8)
Empíricamente la demanda suele estar cerca del 150% del valor de UPPHC, para este valor DPINTERVAL suele valer alrededor del 66% del UPINTERVAL. Esto confirma la teoría de que DPPHC es alrededor de un 60% mayor que UPPHC.
En lo que respecta al cálculo del tiempo medio de espera por pasajero en este periodo, de también manera empírica y tras algunos cálculos simples se llega a la conclusión:
DNPAWT = 1.5 x UPPAWT (4.9)
DNPAWT = 1.5 x 0.85 x UPPINT =1.275 x UPPINT (4.10)
Todo esto deja el RTT como sigue:
RTTD = Ntv + (0.5S+1)ts + 2Ptp (4.11)
Según Barney (2003) estos últimos resultados son los considerados como los más fiables, aún así los estudios realizados poseen ciertas carencias por lo que se aconseja cautela al emplear estos valores numéricos.
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 36 de 180
9.2 Modelo matemático para tráfico entre plantas equilibrado (Interfloor Balanced Traffic)
Representa el periodo más largo de tiempo pero por contra el menos estudiado. Se encuentra muy poco trabajado debido a que una instalación con capacidad suficiente para cumplir en su hora uppeak presentará un grado de solvencia aún mejor en el periodo interfloor, a pesar de utilizar un controlador específicamente diseñado sobretodo para el periodo uppeak. Siikonen (2002) estima que la capacidad del sistema en el periodo balanced interfloor traffic puede ser hasta un 40% mayor que la capacidad de solvencia subyacente del periodo uppeak (UPPHC). Si se necesitase toda esta capacidad los tiempos de espera serían muy grandes, pero como habitualmente el tráfico entre plantas no necesita más del 25% ó 30% de la UPPHC para satisfacer la demanda (Barney y Dos Santos, 1977) los resultados son generalmente más que aceptables.
En este periodo de tiempo la calidad de servicio es mucho más importante que la cantidad de servicio, por lo tanto los parámetros que la caracterizan son los relacionados con los tiempos de espera y de viaje de pasajero.
Strakosch define tres posibles tipos de tráfico:
� Ligero: cuando el número de pasajeros que requieren servicio es de dos a tres veces el número de ascensores del sistema.
� Mediano: si la carga media de los ascensores es menor del 50% de la carga máxima de una cabina.
� Pesado: cuando la carga media de los ascensores es mayor del 50% de la carga máxima de una cabina (aunque es muy raro que se produzca esto de manera equilibrada, este tipo de situaciones son más propias de un tráfico no equilibrado).
Los parámetros del periodo balanced interfloor traffic también se encuentran definidos en función de los parámetros del periodo uppeak de la misma instalación (a excepción del parámetro RTT que no tiene sentido aquí). Así tenemos la demanda definida para un periodo de 5 minutos:
%100xUPPHC
λβ = (4.12)
Una manera de cuantificar la calidad del servicio de manera normalizada consiste en medir el coeficiente AWTBIFT/UPPINT en función de la demandaβ .
Barney y Dos Santos (1977) junto con Lim (1983) obtienen de manera empírica la siguiente fórmula para caracterizar el tiempo medio de espera de los pasajeros en este periodo (IFAWT):
IFAWT = UPPINT (0.22 + 1.78β /100) (4.13)
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 37 de 180
Las simulaciones constaron de más de 2000 situaciones distintas por lo que la consistencia del resultado es notoria.
La demanda de pasajeros que requieren servicio en una hora es un parámetro que caracteriza mejor el funcionamiento del sistema:
γ = X · U /100 (4.14)
Donde X es el porcentaje de la población y U la población total.
Es habitual que el número de paradas medias S sea mayor en este periodo. De manera empírica se ha demostrado que un aumento de la demanda provoca un consiguiente aumento del número de paradas y que esta tendencia satura para un valor de 4.5 paradas por cabina y por minuto, independientemente del número de plantas del edificio o del algoritmo implementado. Esta cifra se considera el máximo número de paradas posibles y representa una demandaβ mayor o igual al 50%.
Para el cálculo de este valor se supuso que el tiempo de pasajero tp era mayor que el tiempo que el ascensor permanece abierto aunque nadie salga o entre de la cabina, tdwell. En caso contrario el límite máximo no tomaría el valor expuesto antes sino el de 3.3 paradas por minuto y por cabina.
Bedford (1967) considera el sistema cargado (busy) cuando las paradas por cabina y por minuto superan o igualan la cifra de 2.25 paradas por minuto y por cabina (la mitad que en un sistema saturado). Se estima que en esta situación un tercio de la población total del edificio está participando en el tráfico compensado entre plantas (balanced interfloor traffic, BIFT).
Para obtener una medida más representativa del tiempo de espera de los pasajeros en este periodo, en lugar de utilizar el AWT se utiliza el percentil 90 del WT como cifra significativa (Lim, 1983). Sólo un 50% de los pasajeros igualarán o superaran el tiempo de espera definido por AWT y todo ello referido a una hora de servicio, por ello se prefiere el percentil 90 que afecta al 90% de los pasajeros como valor que define el tiempo de espera en un periodo largo.
Si representamos el percentil 90 como NPER y admitimos una demandaβ superior al 30%, empíricamente se obtiene lo siguiente:
NPER=2.2AWT y NPER=2.1ASRT (4.15)
Normalmente los mejores algoritmos para este tipo de tráfico son primero HCA, que se provee de información de antemano relativa a la planta destino del viajero, segundo sectorización dinámica y por último sectorización fija. Aún así las mejoras introducidas por algoritmos como ACA en los tiempos de espera y la solvencia no son significativos como para justificar su implantación exclusivamente para este periodo. Estos algoritmos se explicarán en profundidad en el apartado número 6.
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 38 de 180
9.3 Modelo matemático para el tráfico de mediodía (Mid day traffic) Implica condiciones severas de tráfico y se considera actualmente el parámetro que mejor pone a prueba la capacidad de un sistema, sobretodo si el edificio posee alguna planta vestíbulo adicional (además de la situada en la planta baja) con instalaciones del tipo restaurantes, etc....
Este tipo de tráfico incluye a:
� Pasajeros que abandonan su planta de trabajo y viajan hacia la planta principal y viceversa.
� Pasajeros que se desplazan entre plantas.
� Pasajeros que abandonan su planta de trabajo y se desplazan hacia la planta vestíbulo adicional y viceversa.
� Pasajeros que viajan de la planta principal a la planta vestíbulo adicional y viceversa.
Este tipo de tráfico no se encuentra tan estudiado como el tráfico de otros periodos. Siikonen considera que el 50% de los pasajeros tiene intención de viajar en sentido ascendente y el 50% en sentido descendente, de forma más concreta estima un 40% de tráfico uppeak, un 40% de tráfico downpeak y un 20% de interfloor traffic.
Para definir este periodo mediante parámetros se realizan una serie de suposiciones que muchos edificios (sobre todo los altos) pueden no cumplir:
� Se supone que la planta vestíbulo adicional, donde se encuentran los restaurantes, está situada justo al lado de la planta principal.
� Se supone que los ascensores por cada viaje paran una media de S veces y sirven también de media la planta más lejana H.
� También definen un RTT, suponiendo que los pasajeros realizan una llamada desde la cabina (CC) hacia la planta baja o una llamada desde la planta (LC) baja.
� Los ascensores inician y finalizan los viajes cargados al 80% de su capacidad.
Los ascensores recorren la distancia (H-S) en sentido ascendente y descendente y el número total de pasajeros es 2P, debido a esto y a las consideraciones anteriores el RTT se calcula:
RTT = 2(H-S)tv + 2ST + 4Ptp (4.16)
La capacidad de solvencia del sistema durante MDT si no incluimos el tráfico entre plantas que suele ser muy pequeño (en el no tiene sentido RTT):
MIDHC = 300 x 2 x L x P/RTT (4.17)
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 39 de 180
Su valor suele ser entre un 20% y un 40% más alto que UPPHC según Siikonen (2002). El problema es que en ocasiones el tráfico no equilibrado entre plantas, que no se ha tenido en cuenta por ser normalmente escaso y además difícilmente previsible, puede degradar la calidad del sistema de manera muy notoria durante determinados momentos.
Se estima que el periodo MTD tiene una duración de dos horas, 30 minutos por persona y dos tercios de la población total del edificio se implican en él, un tercio por cada hora de periodo. Además se afirma que de existir planta con restaurante en el edificio, dos tercios de los pasajeros en este periodo la visitaran, mientras que el otro tercio viajará hacia o desde la planta baja.
Aún siendo un periodo de larga duración la demanda no suele ser uniforme y por el contrario existen picos elevados de tráfico. Son habituales un “miniperiodo” con perfil parecido a downpeak y otro con perfil parecido a uppeak de unos 10 minutos donde se concentra gran parte de la demanda. La capacidad en estos “miniperiodos” se calcula como el 50% de la HC que resultaría de ser un periodo puro uppeak o downpeak. Esto se realiza así para incluir el tráfico existente en la dirección contraria.
La calidad del funcionamiento del sistema es peor que durante el periodo UP. Se define el tiempo medio de espera como:
MIDAWT = 0.85 MIDINT (4.18)
De las ecuaciones aquí representadas se deriva la conclusión de que un sistema diseñado para uppeak (como lo son la mayoría) funciona correctamente bajo condiciones de tráfico MDT, aunque debido a la naturaleza de este tipo de tráfico las técnicas de simulación permiten caracterizar mejor los comportamientos reales.
10 MÉTODOS GENERALES DE DISEÑO DE LA INSTALACIÓN
Se proponen dos métodos diferentes pero complementarios: el método de Tregenza trata de estimar el número de ascensores y su carga nominal necesaria para cumplir unas espeficicacicones de tiempo mientras que el algoritmo heurístico MUSE intenta minimizar los costes.
10.1 Metodo iterativo de Tregenza Tregenza (1972) propone el procedimiento matemático siguiente:
1. Seleccionar un patrón de llegadasλ .
2. Obtener los datos: N (número de plantas), tv (tiempo que tarda el ascensor en atravesar el espacio de una planta a velocidad constante), ts (tiempo medio de parada, desde que se para y abre las puertas hasta que vuelven a estar completamente cerradas) y tp
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 40 de 180
(tiempo medio que tarda un pasajero en entrar al ascensor. Este parámetro es muy difícil de medir y poco fiable).
3. Seleccionar un intervalo INT adecuado a la calidad de servicio que se requiera.
4. Calcular P (número medio de pasajeros que ocupan la cabina en la planta principal), H (planta media servida a mayor altitud) y S (número medio de paradas por cada viaje de ascensor).
5. Calcular el tiempo medio por ronda (RTT).
6. Seleccionar un número de ascensores (L) para obtener un valor de INT parecido al estimado en el paso 3.
7. Comparar el parámetro INT estimado en el paso 3 con el calculado en el paso 6. Si existen diferencias significativas, se calcula un nuevo valor INT y se vuelven a realizar los pasos 4, 5, 6 y 7 hasta satisfacer el criterio de las manera siguiente:
Nuevo INT=INT(paso 6)+[INT(paso 6)-INT(3)] (5.1)
8. Seleccionar una capacidad estándar adecuada, que permita un porcentaje de carga del 80% aproximadamente.
10.2 Algoritmo heurístico MUSE Matsuzaki et al (1999) plantea el algoritmo heurístico MUSE (MUlti-Story layout algorithm with the consideration of Elevator utilization) que solventa el problema de la distribución “multi-planta” con la consideración de la utilización del ascensor.
Si se tiene en cuenta sólo el coste de instalación del ascensor, la solución óptima es el mínimo número de ascensores. Sin embargo, en este algoritmo se tiene en cuenta también el coste del manejo del material. Así se tienen dos tipos de coste:
� El coste del manejo del material, tanto para el transporte vertical como para el horizontal (de ahí que se optimice la ubicación de los ascensores).
� Los costes de instalación de los mismos.
A partir de aquí se construye el siguiente modelo de programación lineal:
( )minN N
H H V Vij ij ij ij ij inst
i j
c d c d n n c+ ⋅ + ⋅∑∑ (5.2)
Sujeto a las siguientes restricciones:
n MIN≥ (5.3)
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 41 de 180
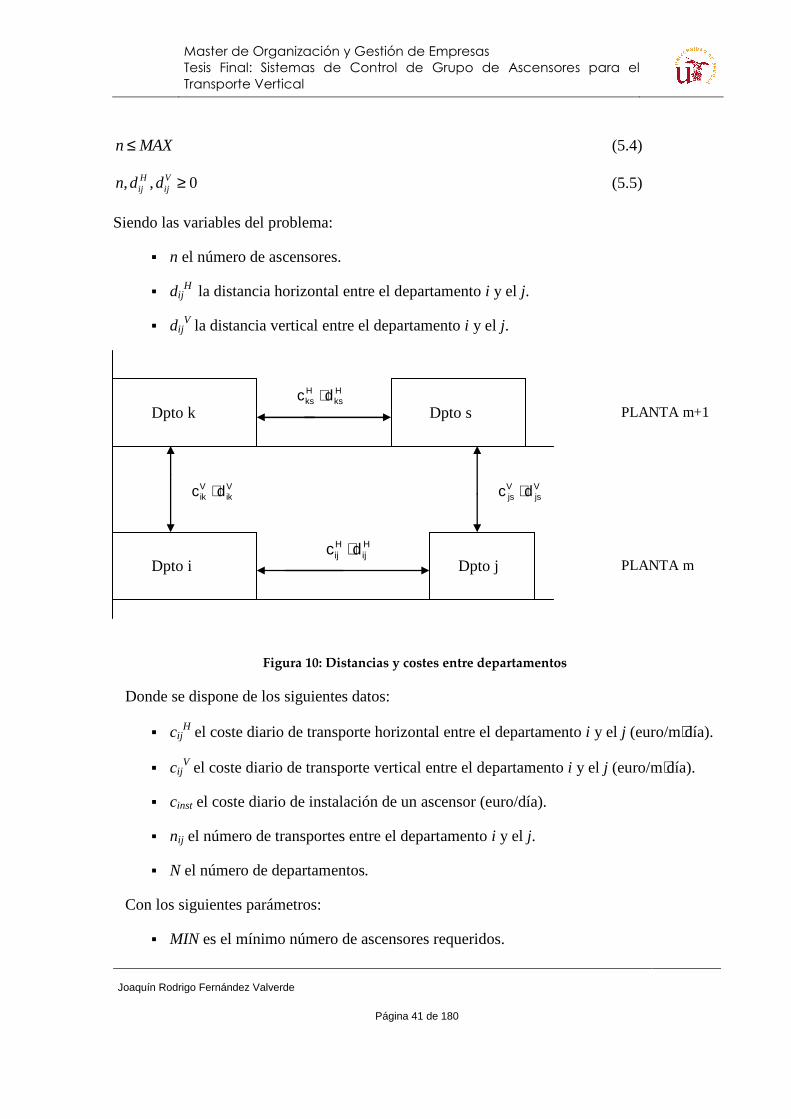
n MAX≤ (5.4)
, , 0H Vij ijn d d ≥ (5.5)
Siendo las variables del problema:
� n el número de ascensores.
� dijH la distancia horizontal entre el departamento i y el j.
� dijV la distancia vertical entre el departamento i y el j.
PLANTA m+1
PLANTA m
Hij
Hij dc ⋅
Vik
Vik dc ⋅
Dpto i Dpto j
Dpto k Dpto s
Hks
Hks dc ⋅
Vjs
Vjs dc ⋅
Figura 10: Distancias y costes entre departamentos
Donde se dispone de los siguientes datos:
� cijH el coste diario de transporte horizontal entre el departamento i y el j (euro/m⋅día).
� cijV el coste diario de transporte vertical entre el departamento i y el j (euro/m⋅día).
� cinst el coste diario de instalación de un ascensor (euro/día).
� nij el número de transportes entre el departamento i y el j.
� N el número de departamentos.
Con los siguientes parámetros:
� MIN es el mínimo número de ascensores requeridos.
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 42 de 180
� MAX es el máximo número de ascensores requeridos.
El primero se calcula de la siguiente forma:
1TPTES
MINCAPAC = +
(5.6)
donde:
� TPTES es la cantidad de transportes entre plantas por día (esta cantidad depende de la distribución establecida, dij ).
� CAPAC es la capacidad diaria de un ascensor.
Por ejemplo, si el número de transportes entre plantas por día es de 250, y la capacidad diaria es de 100, el número mínimo de ascensores requerido es 3.
El número máximo se halla de la siguiente forma:
1
NT
ii
MAX NA=
=∑ (5.7)
donde:
� NAi es el número de ascensores en el transporte i.
� NT es el número de transportes entre diferentes plantas.
Este modelo de programación lineal presenta una mejora considerable con respecto a otros modelos propuestos, como por ejemplo:
� SPACECRAFT: extensión del conocido algoritmo de distribución en planta única CRAFT al problema “multi-planta”. No tiene en cuenta la consideración de los ascensores. Calcula el coste de manejo de material para el transporte vertical sin el uso de los ascensores. Es bastante probable la separación de departamentos en dos o más plantas.
� MULTIPLE : elimina dos defectos del algoritmo SPACECRAFT:
- Considera los ascensores al calcular el coste del transporte vertical aunque esto no optimize el número y ubicación de los ascensores.
- Elimina la separación de departamentos.
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 43 de 180
� SABLE: mejora el algoritmo MULTIPLE en cuanto a que emplea una búsqueda basada en SA (Simulated Annealing), en lugar de la búsqueda monótona que se emplea en los dos algoritmos anteriores.
Estos tres algoritmos comienzan con una distribución inicial e intentan mejorarla.
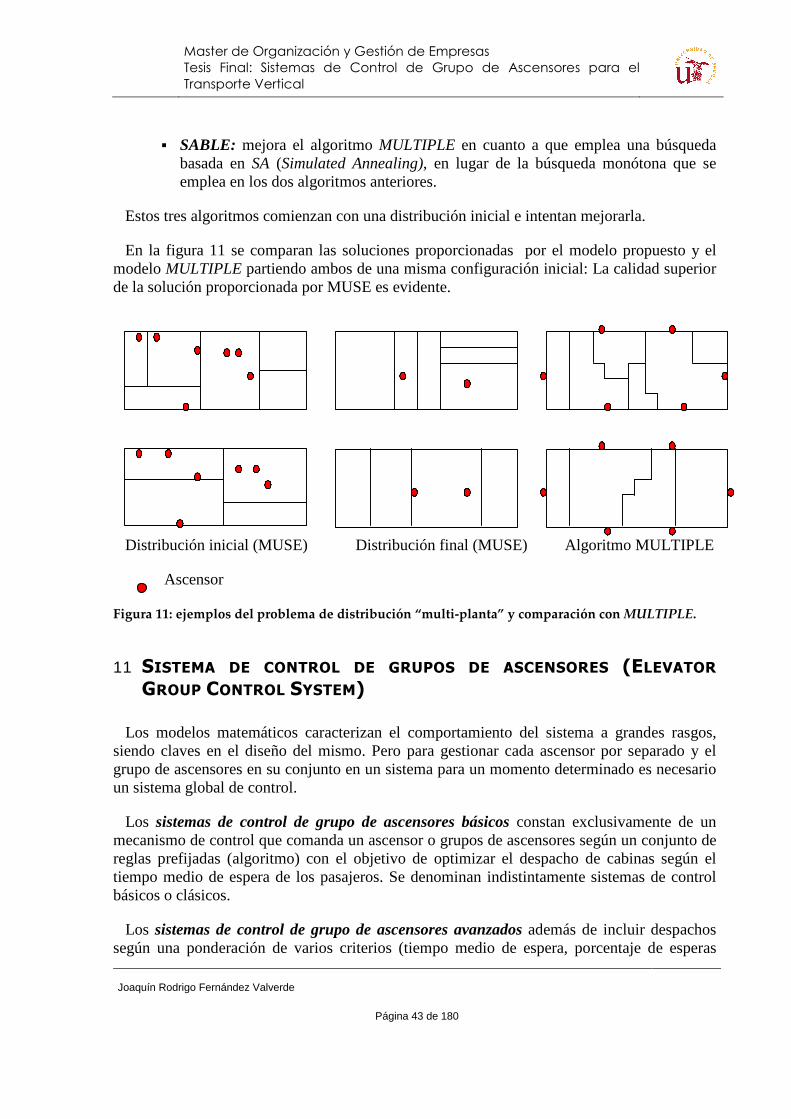
En la figura 11 se comparan las soluciones proporcionadas por el modelo propuesto y el modelo MULTIPLE partiendo ambos de una misma configuración inicial: La calidad superior de la solución proporcionada por MUSE es evidente.
Distribución inicial (MUSE) Distribución final (MUSE) Algoritmo MULTIPLE
Ascensor
Figura 11: ejemplos del problema de distribución “multi-planta” y comparación con MULTIPLE.
11 SISTEMA DE CONTROL DE GRUPOS DE ASCENSORES (ELEVATOR
GROUP CONTROL SYSTEM)
Los modelos matemáticos caracterizan el comportamiento del sistema a grandes rasgos, siendo claves en el diseño del mismo. Pero para gestionar cada ascensor por separado y el grupo de ascensores en su conjunto en un sistema para un momento determinado es necesario un sistema global de control.
Los sistemas de control de grupo de ascensores básicos constan exclusivamente de un mecanismo de control que comanda un ascensor o grupos de ascensores según un conjunto de reglas prefijadas (algoritmo) con el objetivo de optimizar el despacho de cabinas según el tiempo medio de espera de los pasajeros. Se denominan indistintamente sistemas de control básicos o clásicos.
Los sistemas de control de grupo de ascensores avanzados además de incluir despachos según una ponderación de varios criterios (tiempo medio de espera, porcentaje de esperas
Master de Organización y Gestión de Empresas Tesis Final: Sistemas de Control de Grupo de Ascensores para el
Transporte Vertical
Joaquín Rodrigo Fernández Valverde
Página 44 de 180
largas, energía consumida, etc…), se encargan en ocasiones de realizar también tareas de predicción de tráfico y estimación de la demanda o de la calibración de parámetros. Se denominan indistintamente sistemas de control avanzados o modernos.