Embed Size (px)
Citation preview

Particle Swarm Optimization and Social Interaction Between Agents
Kenneth LeeTJHSST 2008
Overview
Overview of PSO
Background Research
Project Goals
Types of Social Interactions
Project State/Results
Conclusion
Overview Of PSO
Originally designed to model birdsOvertime became more analogous to a swarming animal (bees)Search for Global OptimaInfinite search spaces

Overview Of PSO
“Particles” (vectors)Random PositionRandom VelocityInfluences on Velocity
Cognitive Influence Social Influence
Convergence(?)

Particle Swarm Optimization
for k = 1 to number of particles n doif (fitness(k) < fitness_lbest(k))
lbest(k) = pos(k)endif
end do
for k = 1 to number of particles n dosocial(k)
enddo
for k = 1 to number of particles n dofor I = 1 to number of dimensions d do
R1 = randomNumberR2 = randomNumberV[k][I] = w * (C1 * R1 *
(pos-lbest) + C2 * R2 * (pos-gbest))X[k][I] = pos + V[k][I]
enddoenddo
Determining lbest
Social Interaction
Adjusting Position

Importance of Social Interaction
Influences Velocity V = ??? X’ = X + V
Encourages ExplorationThrough Social Interaction, Particles are able to communicate information and extrapolate data about the objective function.
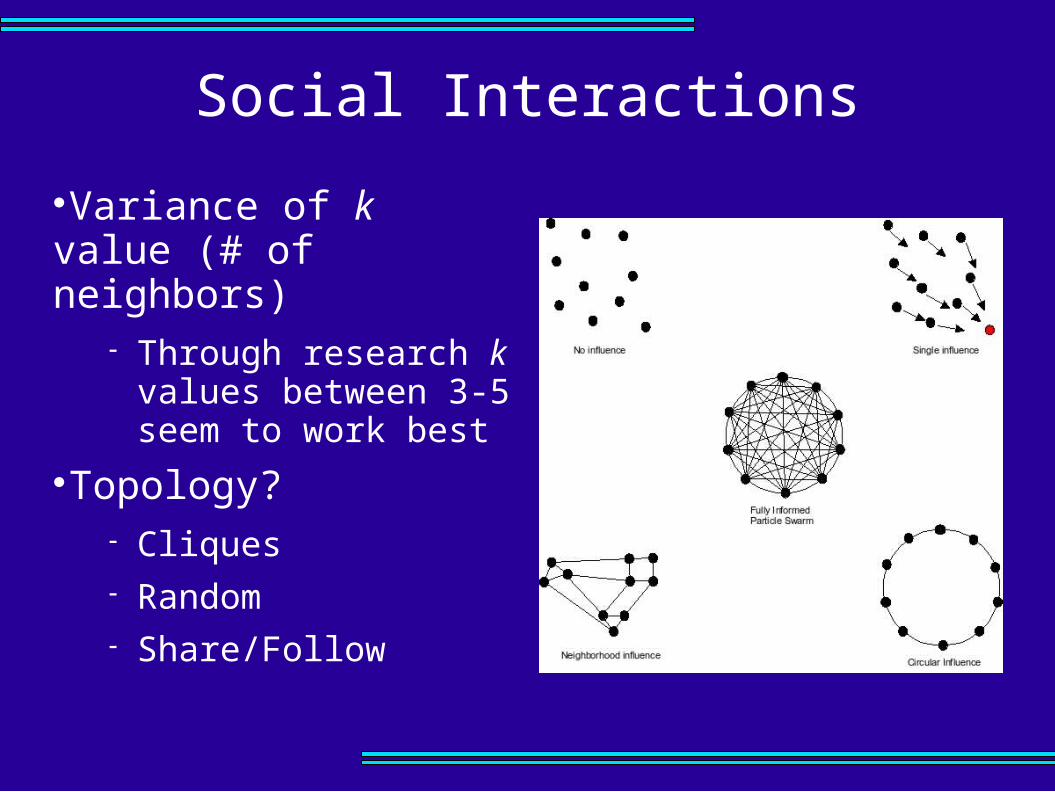
Social Interactions
Variance of k value (# of neighbors)
Through research k values between 3-5 seem to work best
Topology? Cliques Random Share/Follow

Project State
5 Interactions NIPS SIPS RIPS FIPS DIPS
3 Benchmark Functions
Rastrigin, Six Camel Hump, Sphere

NIPS (Non-Informed Particle Swarm)
0 5 10 15 20 25
0
50
100
150
200
250
RN-3-4--1_0.txt
RN-3-4--1_1.txt
RN-3-4--1_2.txt
RN-3-4--1_3.txt
RN-3-4--1_4.txt

SIPS(Singly-Informed Particle Swarm)
0 20 40 60 80 100 120 140 160
0
50
100
150
200
250
RS-3-4--1_0.txt
RS-3-4--1_1.txt
RS-3-4--1_2.txt
RS-3-4--1_3.txt
RS-3-4--1_4.txt

RIPS(Ring Informed Particle Swarm)
0 100 200 300 400 500 600 700 800
0
50
100
150
200
250
300
350
400
RR-3-4--1_0.txt
RR-3-4--1_1.txt
RR-3-4--1_2.txt
RR-3-4--1_3.txt
RR-3-4--1_4.txt
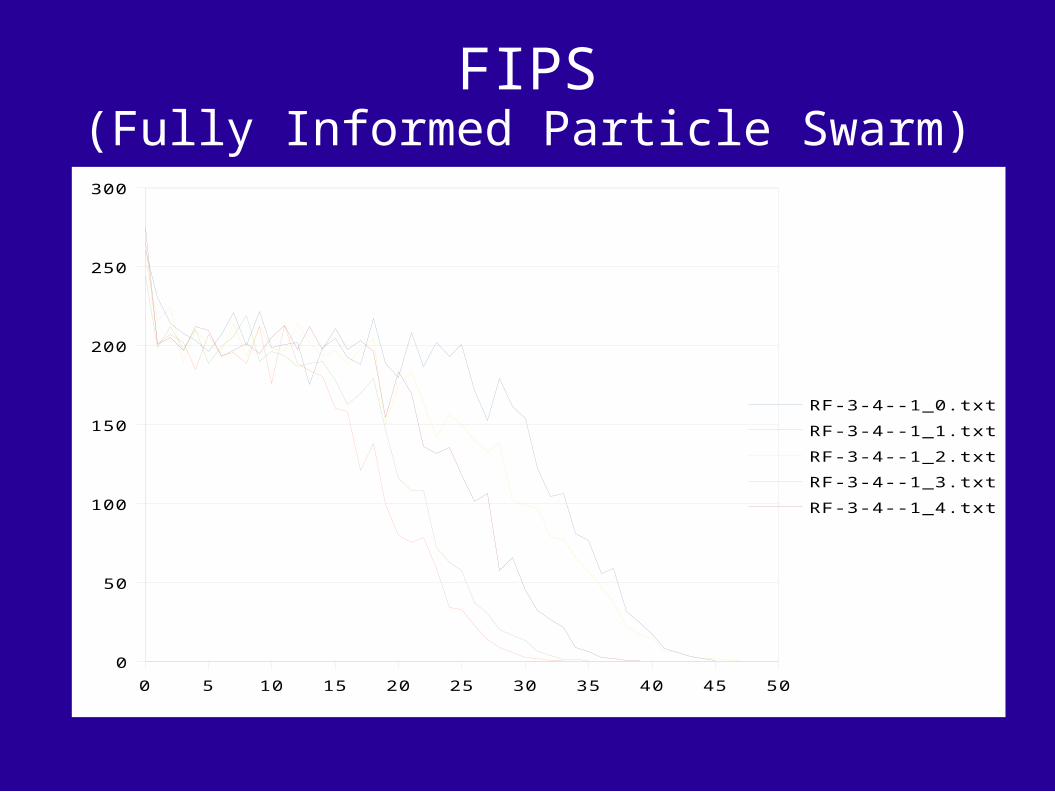
FIPS(Fully Informed Particle Swarm)
0 5 10 15 20 25 30 35 40 45 50
0
50
100
150
200
250
300
RF-3-4--1_0.txt
RF-3-4--1_1.txt
RF-3-4--1_2.txt
RF-3-4--1_3.txt
RF-3-4--1_4.txt
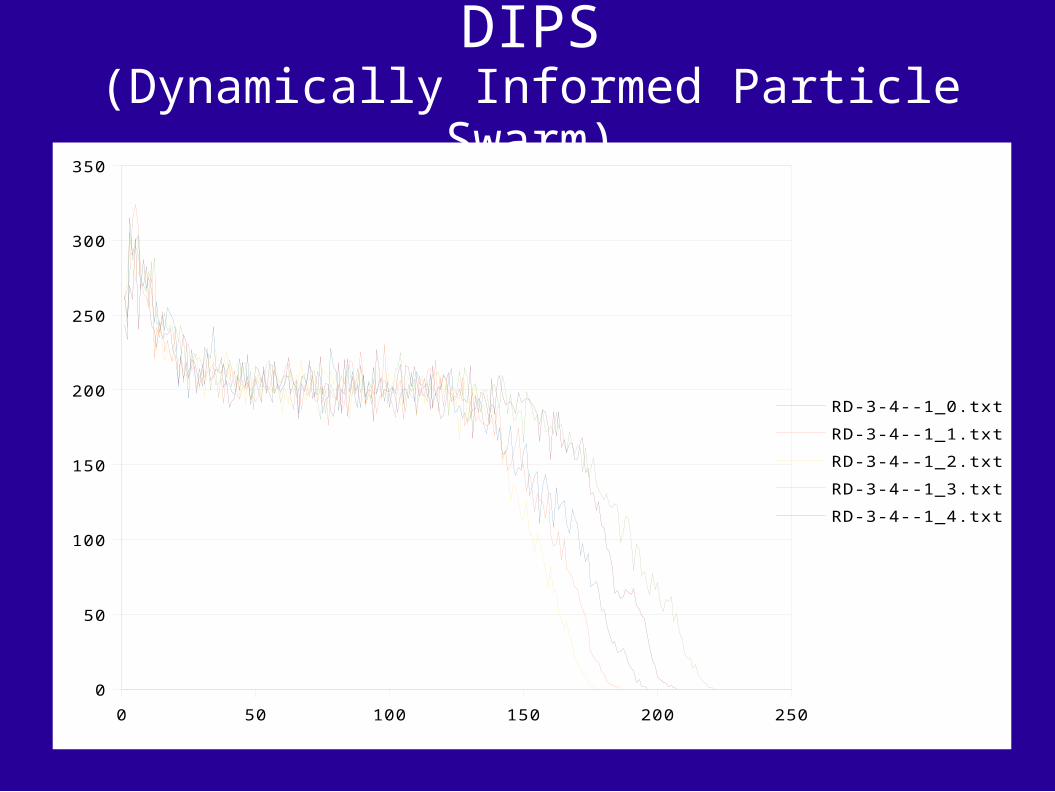
DIPS(Dynamically Informed Particle Swarm)
0 50 100 150 200 250
0
50
100
150
200
250
300
350
RD-3-4--1_0.txt
RD-3-4--1_1.txt
RD-3-4--1_2.txt
RD-3-4--1_3.txt
RD-3-4--1_4.txt

Conclusions
DIPS seems to perform best
Time onlyDIPS and RIPS have 100% success rateFIPS converges fastest





























