Embed Size (px)
DESCRIPTION
Partitioned approach for Fluid-Structure-Interaction (FSI). Atanas Gegov TU M ünchen. Outline. What is FSI Different approaches for solving FSI problems Algorithmical improvements of the partitioned approach How partitioned FSI can be realized – FSI*ce. Outline. What is FSI - PowerPoint PPT Presentation
Citation preview
Ferienakademie 2007
Partitioned approach for Fluid-Structure-Interaction (FSI)
Atanas GegovTU München
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 2
Ferienakademie 2007
Outline
• What is FSI
• Different approaches for solving FSI problems
• Algorithmical improvements of the partitioned approach
• How partitioned FSI can be realized – FSI*ce
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 3
Ferienakademie 2007
Outline
• What is FSI
– Why is FSI simulation interesting
– Examples of different FSI occurrences
• Different approaches for solving FSI problems
• Algorithmical improvements of the partitioned approach
• How partitioned FSI can be realized – FSI*ce
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 4
Ferienakademie 2007
What is FSI
• Fluid-Structure-Interaction (in German: “Fluid- Struktur- Wechselwirkung ”)
• Describes interaction between fluid (liquid or gas) and solid body (structure) in a system
– fluid interacts with a solid structure, exerting pressure that may cause deformation or displacement in the structure and, thus, alter the flow of the fluid itself
• Typically connected with “bad” things– fluttering of airplanes– deformations– vibrations– even collapse of buildings
• Interesting for many researchers in physics, mathematics and computer science
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 5
Ferienakademie 2007
What is FSI | Why is FSI simulation interesting
• Possibilities due to high-performance computing
• Simulation: describing or predicting the state of the system under specified conditions. A set of states ordered according to time is a response.
• Extensive experimental testing – costly– time-consuming
• Growing demand for the accurate and efficient numerical solution of FSI problems in various engineering disciplines
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 6
Ferienakademie 2007
What is FSI | Examples of different FSI occurrences
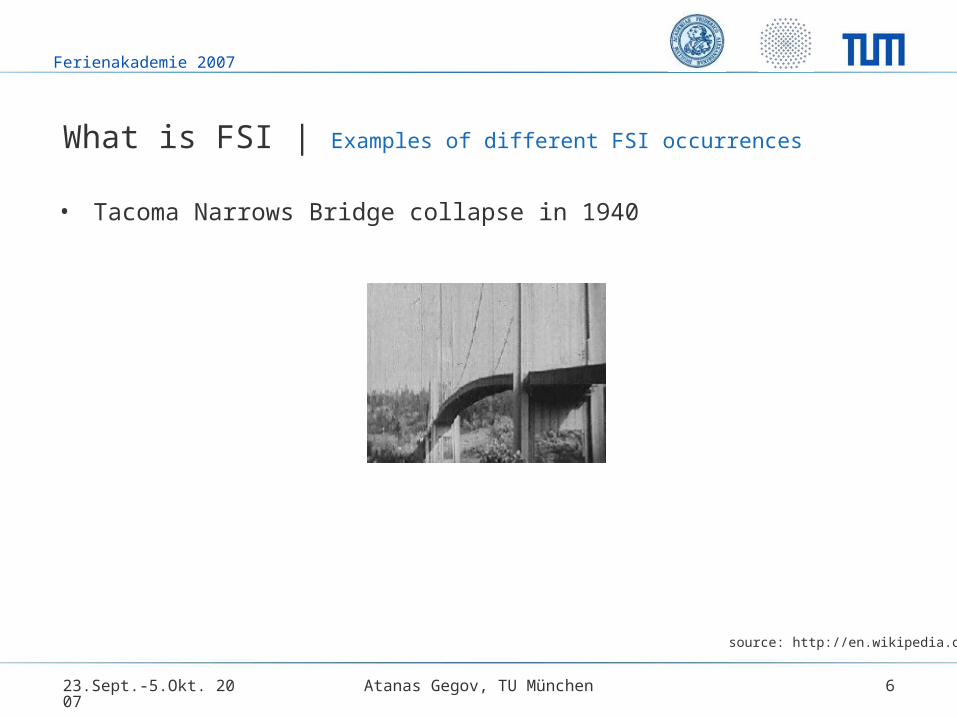
• Tacoma Narrows Bridge collapse in 1940
source: http://en.wikipedia.org
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 7
Ferienakademie 2007
What is FSI | Examples of different FSI occurrences
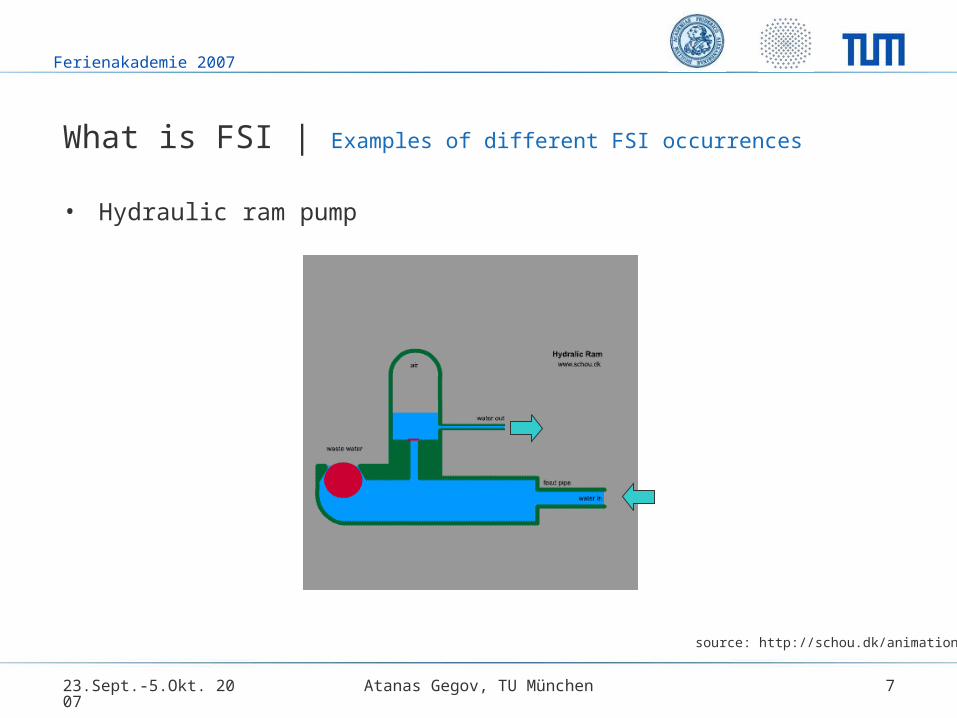
• Hydraulic ram pump
source: http://schou.dk/animation/
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 8
Ferienakademie 2007
What is FSI | Examples of different FSI occurrences
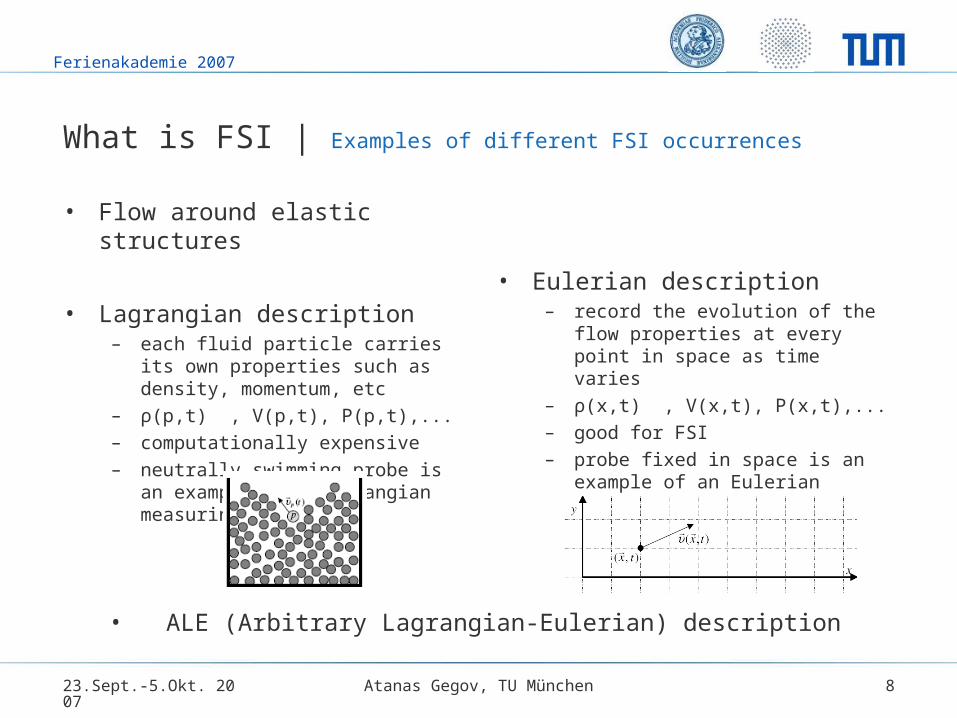
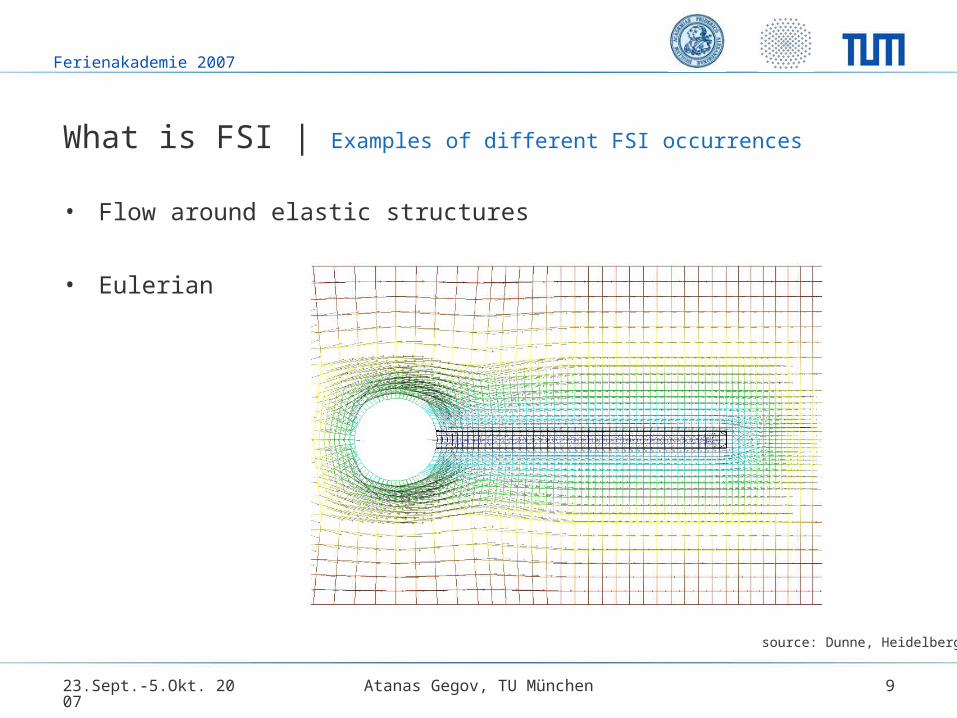
• Flow around elastic structures
• Lagrangian description– each fluid particle carries its own
properties such as density, momentum, etc
– ρ(p,t) , V(p,t), P(p,t),... – computationally expensive – neutrally swimming probe is an
example of a Lagrangian measuring device
• Eulerian description– record the evolution of the flow
properties at every point in space as time varies
– ρ(x,t) , V(x,t), P(x,t),...– good for FSI – probe fixed in space is an
example of an Eulerian measuring device
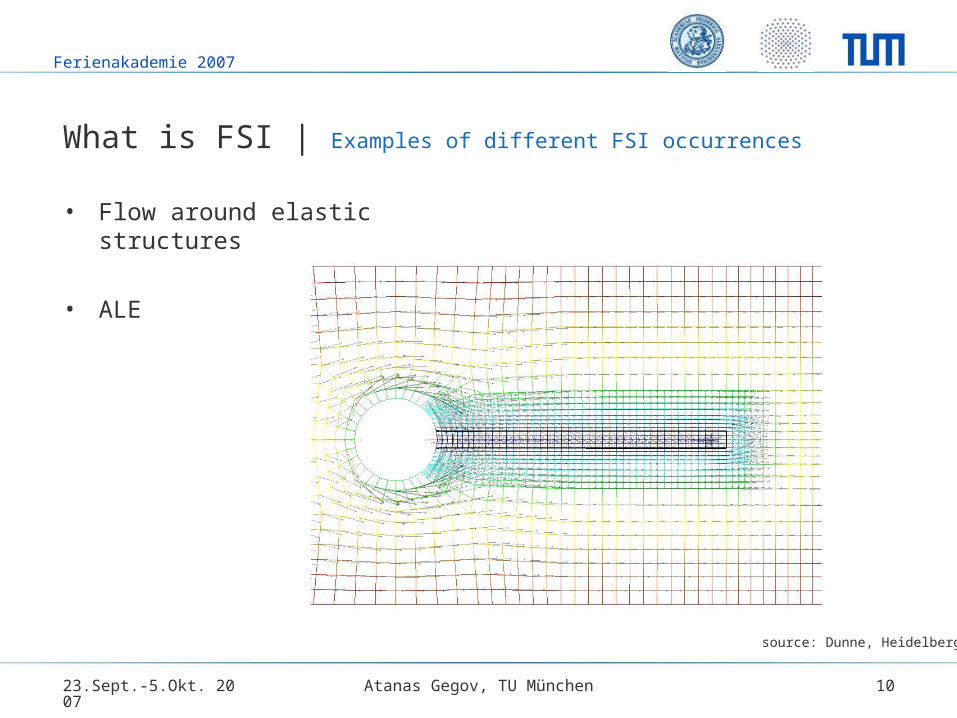
• ALE (Arbitrary Lagrangian-Eulerian) description
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 9
Ferienakademie 2007
What is FSI | Examples of different FSI occurrences
• Flow around elastic structures
• Eulerian
source: Dunne, Heidelberg
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 10
Ferienakademie 2007
What is FSI | Examples of different FSI occurrences
• Flow around elastic structures
• ALE
source: Dunne, Heidelberg
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 11
Ferienakademie 2007
Outline
• What is FSI
• Different approaches for solving FSI problems
– Monolithic approach
– Partitioned approach• Idea• Terminology• Pros and contras• Example of the basic idea• Loosely-coupled and strongly-coupled partitioned approach
• Algorithmical improvements of the partitioned approach
• How partitioned FSI can be realized – FSI*ce
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 12
Ferienakademie 2007
Different approaches for solving FSI problems
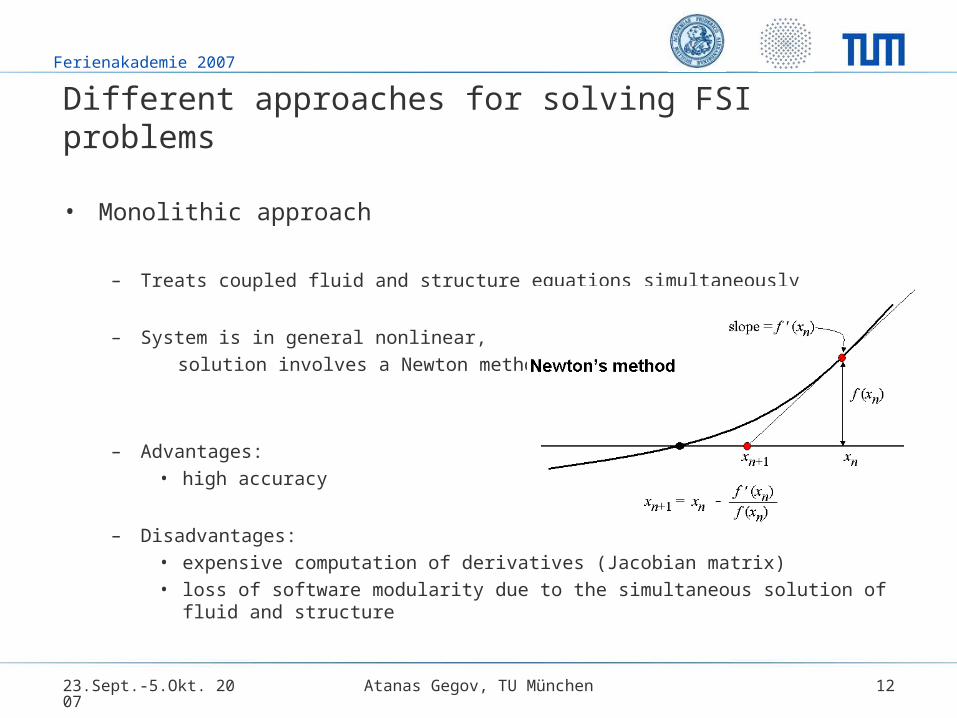
• Monolithic approach
– Treats coupled fluid and structure equations simultaneously
– System is in general nonlinear, solution involves a Newton method
– Advantages:• high accuracy
– Disadvantages:• expensive computation of derivatives (Jacobian matrix)• loss of software modularity due to the simultaneous solution of fluid and
structure
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 13
Ferienakademie 2007
Different approaches for solving FSI problems
• Partitioned approach
– Very popular for solving FSI
– The idea is universal for coupled systems
• Applications in– thermomechanics– FSI– control-structure-Interaction
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 14
Ferienakademie 2007
Different approaches for solving FSI problems
• Partitioned approach | Idea
– Systems spatially decomposed into partitions
– Solution is separately advanced in time over each partition
– Partitions interact on their interface (mesh structure that is closed, e.g. airplane)
– Interaction by transmission and synchronization of coupled state variables
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 15
Ferienakademie 2007
Different approaches for solving FSI problems
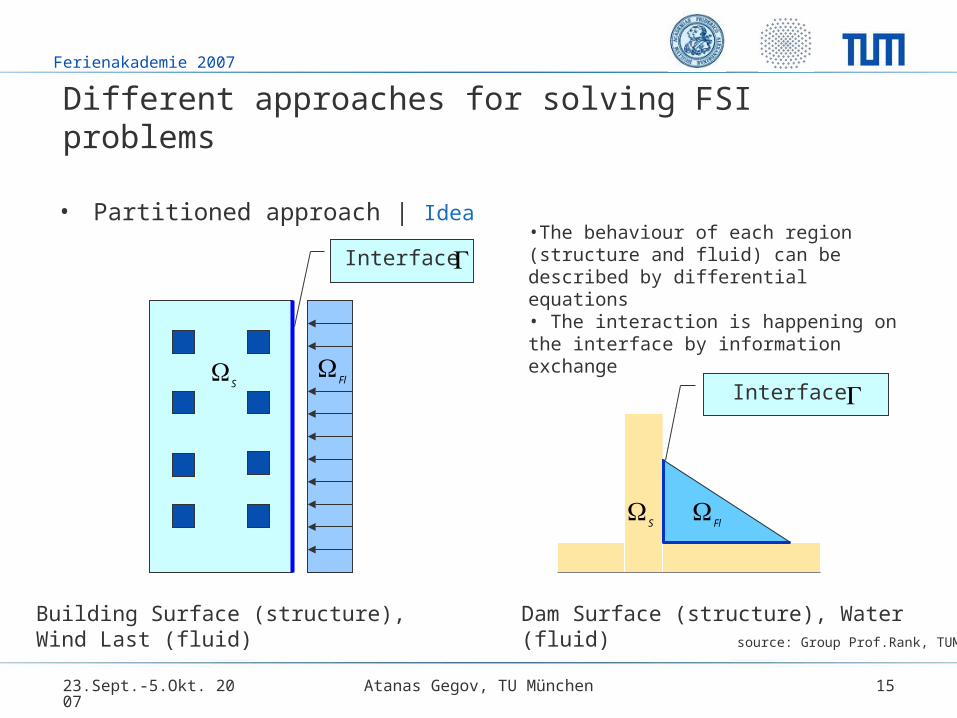
• Partitioned approach | Idea
Interface
Building Surface (structure), Wind Last (fluid)
S Fl
Interface
Dam Surface (structure), Water (fluid)
S
Fl
•The behaviour of each region (structure and fluid) can be described by differential equations• The interaction is happening on the interface by information exchange
source: Group Prof.Rank, TUM
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 16
Ferienakademie 2007
Different approaches for solving FSI problems
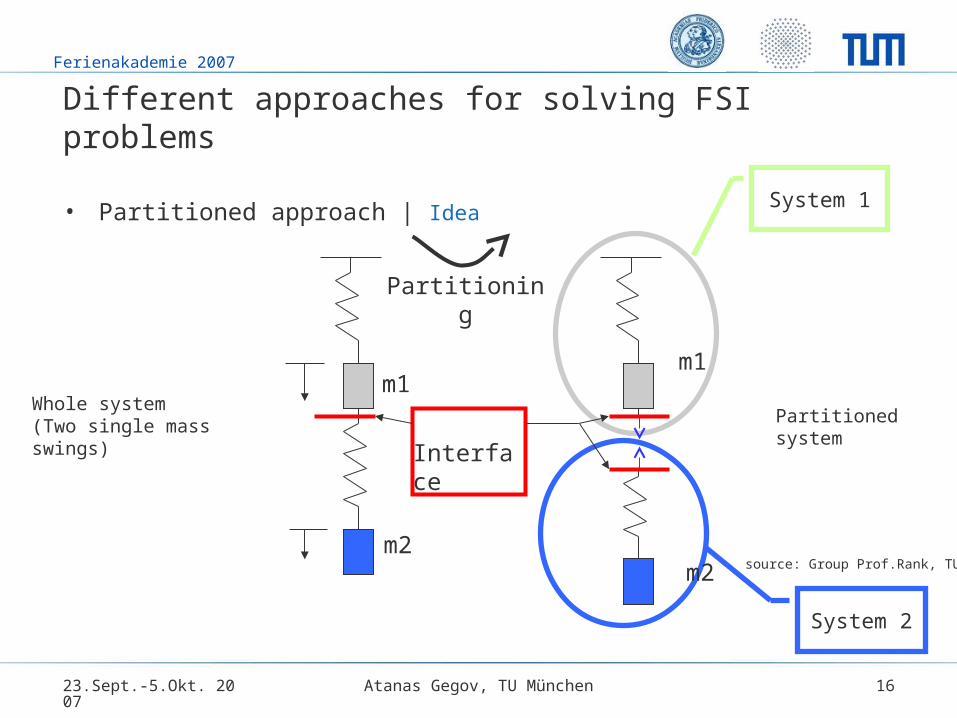
• Partitioned approach | Idea
m1
m2
Interface
System 1
System 2
m2
Partitioning
m1
Whole system (Two single mass swings)
Partitioned system
source: Group Prof.Rank, TUM
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 17
Ferienakademie 2007
Different approaches for solving FSI problems
• Partitioned approach | Idea
– Systems analyzed by decomposition
– Decompositions called partitions are suitable for computer simulation – Partitioning: process of spatial separation of a discrete model into interacting
components generically called partitions
– Decomposition driven by • physical• functional• computational considerations
– Example: flight simulation
– multilevel partition hierarchy: coupled system, structure, substructure, subdomain and element; typical of present practice in modeling and computational technology
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 18
Ferienakademie 2007
Different approaches for solving FSI problems
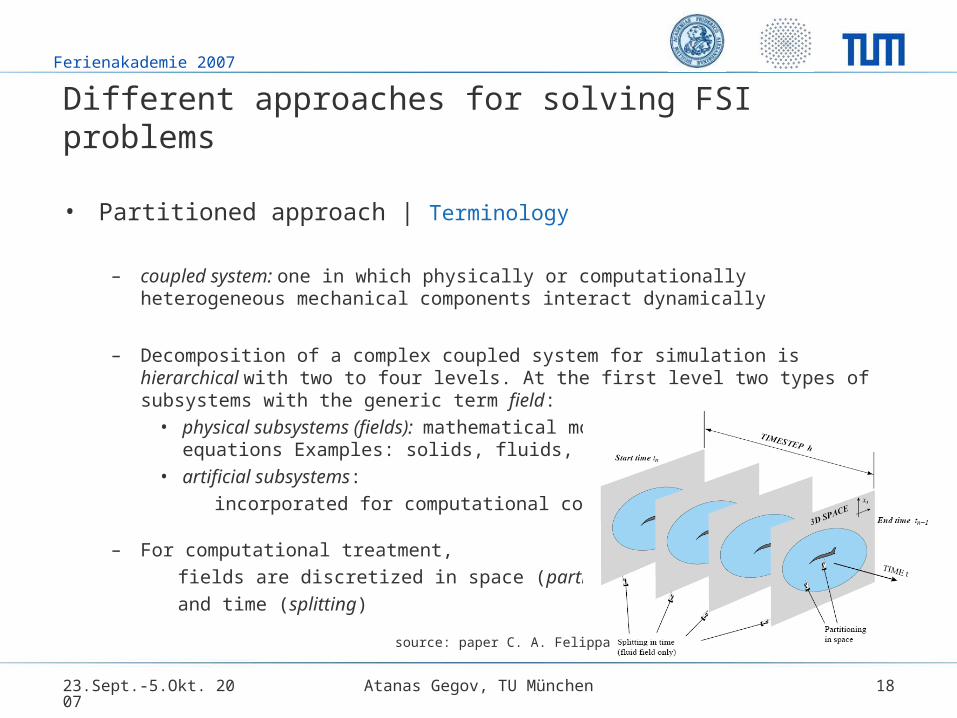
• Partitioned approach | Terminology
– coupled system: one in which physically or computationally heterogeneous mechanical components interact dynamically
– Decomposition of a complex coupled system for simulation is hierarchical with two to four levels. At the first level two types of subsystems with the generic term field:
• physical subsystems (fields): mathematical model described by field equations Examples: solids, fluids, heat, electromagnetics
• artificial subsystems: incorporated for computational convenience
– For computational treatment, fields are discretized in space (partitioning) and time (splitting)
source: paper C. A. Felippa
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 19
Ferienakademie 2007
Different approaches for solving FSI problems
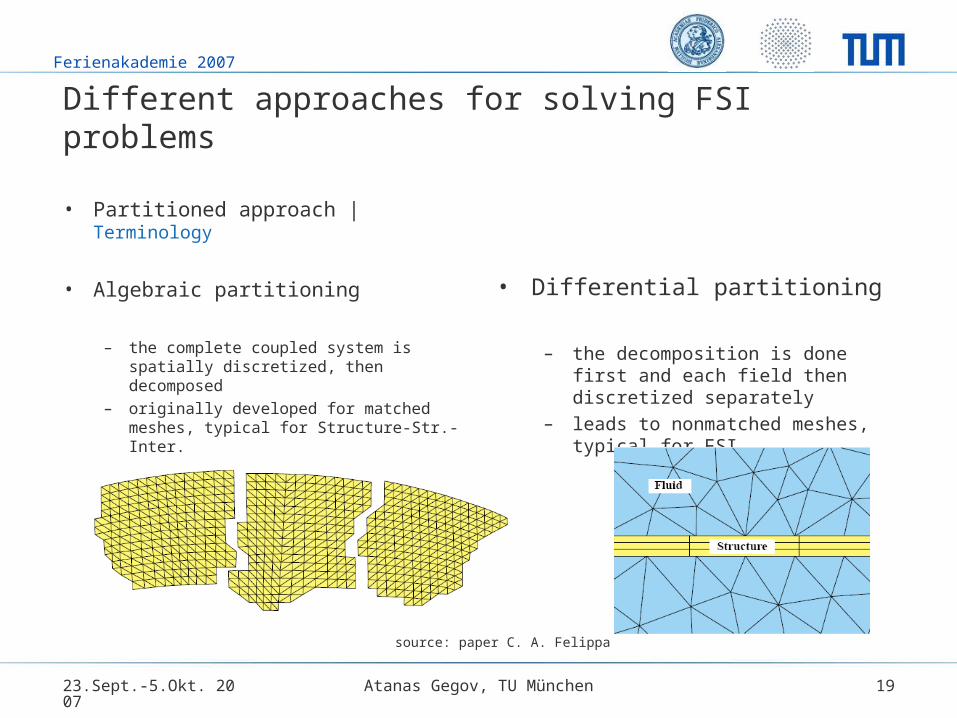
• Partitioned approach | Terminology
• Algebraic partitioning
– the complete coupled system is spatially discretized, then decomposed
– originally developed for matched meshes, typical for Structure-Str.-Inter.
• Differential partitioning
– the decomposition is done first and each field then discretized separately
– leads to nonmatched meshes, typical for FSI
source: paper C. A. Felippa
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 20
Ferienakademie 2007
Different approaches for solving FSI problems
• Partitioned approach | Pros and contras
• Advantages– customization– independent modeling– software reuse– modularity
• Disadvantages– partitioned approach requires careful formulation and implementation to avoid
serious degradation in stability and accuracy – parallel implementations are error-prone
• Summary– research environment, access to existing software, localized interaction effects
(e.g. surface vs volume) => partitioned approach – commercial environment, rigid deliverable timetable, massive software
development resources, global interaction effects => monolithic approach
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 21
Ferienakademie 2007
Different approaches for solving FSI problems
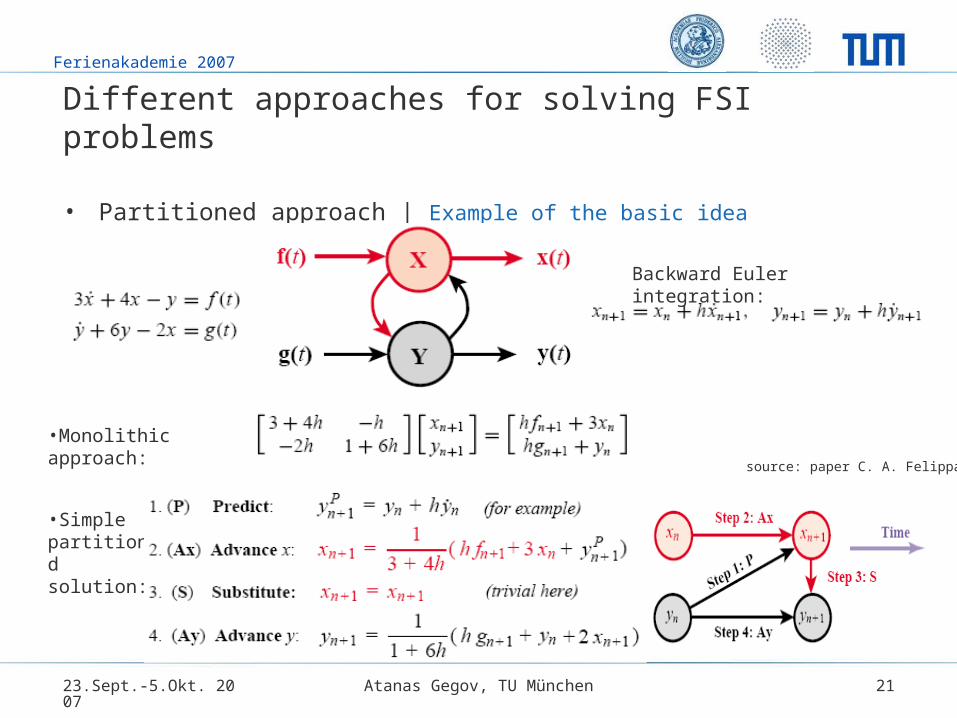
• Partitioned approach | Example of the basic idea
Backward Euler integration:
•Monolithic approach:
•Simple partitioned solution:
source: paper C. A. Felippa
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 22
Ferienakademie 2007
Different approaches for solving FSI problems
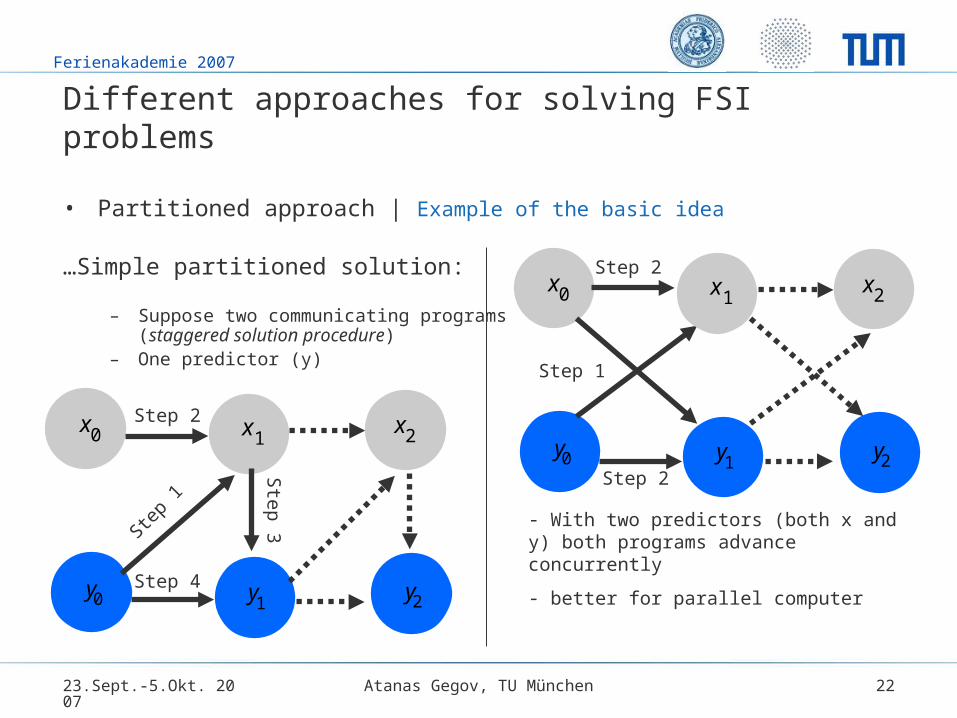
• Partitioned approach | Example of the basic idea
…Simple partitioned solution:
– Suppose two communicating programs(staggered solution procedure)
– One predictor (y)
1x0x
0y
Step 2
Step 3
Step 41y
Step
1
2x
2y
- With two predictors (both x and y) both programs advance concurrently
- better for parallel computer
0x
0y
2x
2y
Step 1
1x
1y
Step 2
Step 2
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 23
Ferienakademie 2007
Different approaches for solving FSI problems
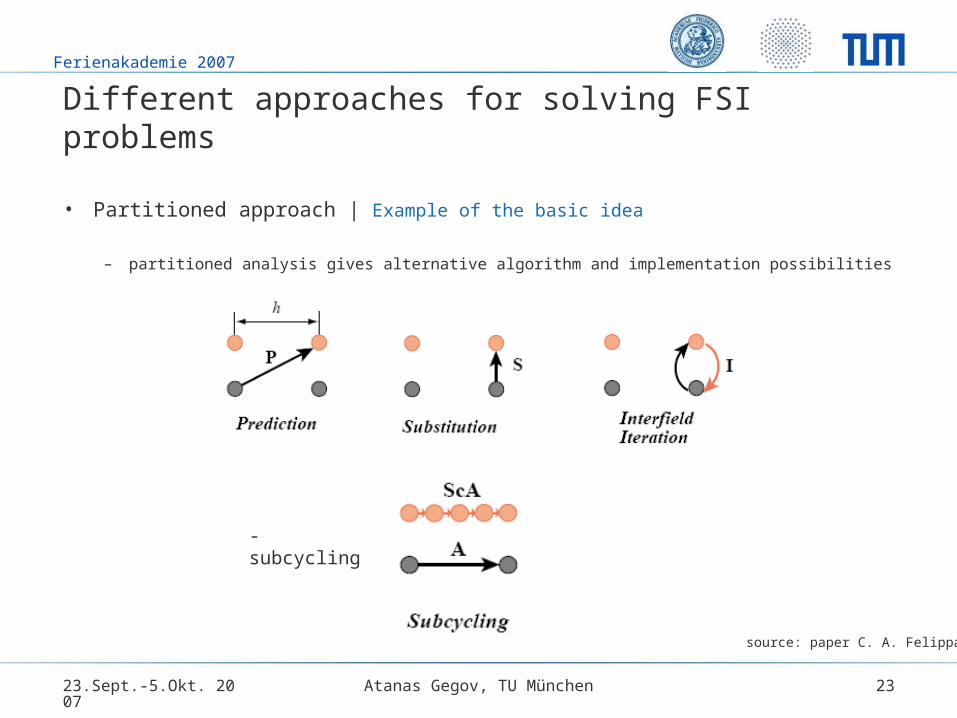
• Partitioned approach | Example of the basic idea
– partitioned analysis gives alternative algorithm and implementation possibilities
- subcycling
source: paper C. A. Felippa
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 24
Ferienakademie 2007
Different approaches for solving FSI problems
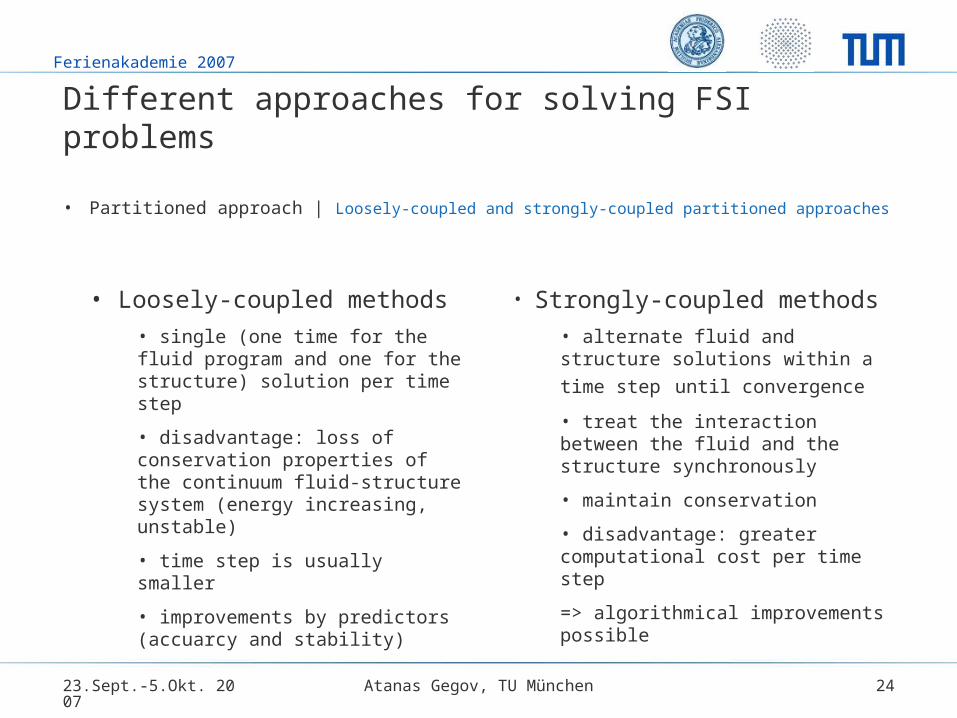
• Partitioned approach | Loosely-coupled and strongly-coupled partitioned approaches
• Strongly-coupled methods• alternate fluid and structure
solutions within a time step until convergence
• treat the interaction between the fluid and the structure synchronously
• maintain conservation
• disadvantage: greater computational cost per time step
=> algorithmical improvements possible
• Loosely-coupled methods• single (one time for the fluid program and one for the structure) solution per time step
• disadvantage: loss of conservation properties of the continuum fluid-structure system (energy increasing, unstable)
• time step is usually smaller
• improvements by predictors (accuarcy and stability)
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 25
Ferienakademie 2007
Outline
• What is FSI
• Different approaches for solving FSI problems
• Algorithmical improvements of the partitioned approach
– Multi-Grid
– Interface-GMRES(R)/ Newton-Krylov
• How partitioned FSI can be realized – FSI*ce
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 26
Ferienakademie 2007
Algorithmical improvements of the partitioned approach
• Subiteration in detail
– Initial approximation z0 Є Z of the structure solution (the structure displacement at the interface) for j = 1, 2 . . .
(1) Solve the kinematic condition: fluid velocity at the interface = velocity of the interface Constitutes a boundary condition for the initial-boundary-value problem of the fluid (2) Solve the fluid: the result is the flow velocity and pressure fields (3) Solve the dynamic condition: the result is the fluid pressure (the forces) acting on the structure surface (4) Solve the structure: the result is the displacement of every point on the structure surface
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 27
Ferienakademie 2007
Algorithmical improvements of the partitioned approach
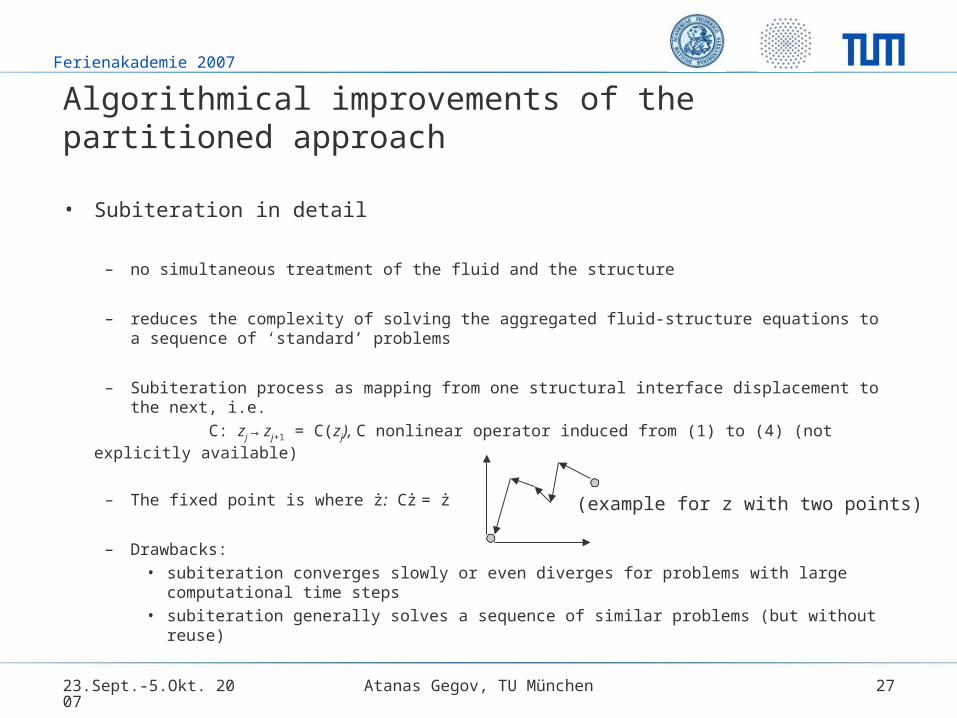
• Subiteration in detail
– no simultaneous treatment of the fluid and the structure
– reduces the complexity of solving the aggregated fluid-structure equations to a sequence of ‘standard’ problems
– Subiteration process as mapping from one structural interface displacement to the next, i.e.
C: zj → zj+1 = C(zj), C nonlinear operator induced from (1) to (4) (not explicitly available)
– The fixed point is where ż: Cż = ż
– Drawbacks: • subiteration converges slowly or even diverges for problems with large
computational time steps• subiteration generally solves a sequence of similar problems (but without reuse)
(example for z with two points)
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 28
Ferienakademie 2007
Algorithmical improvements of the partitioned approach
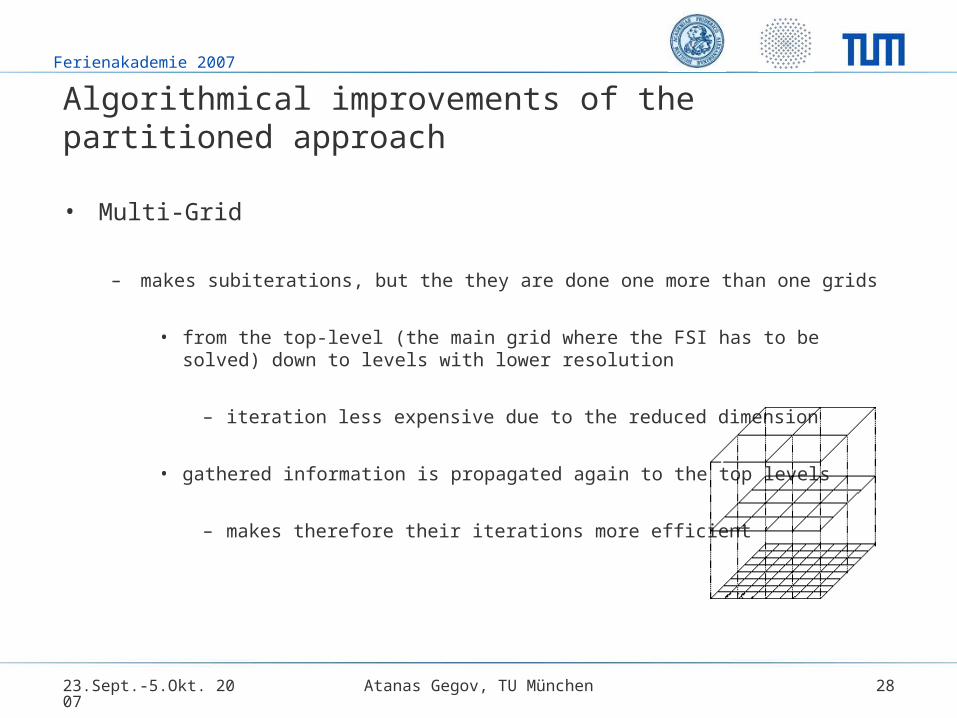
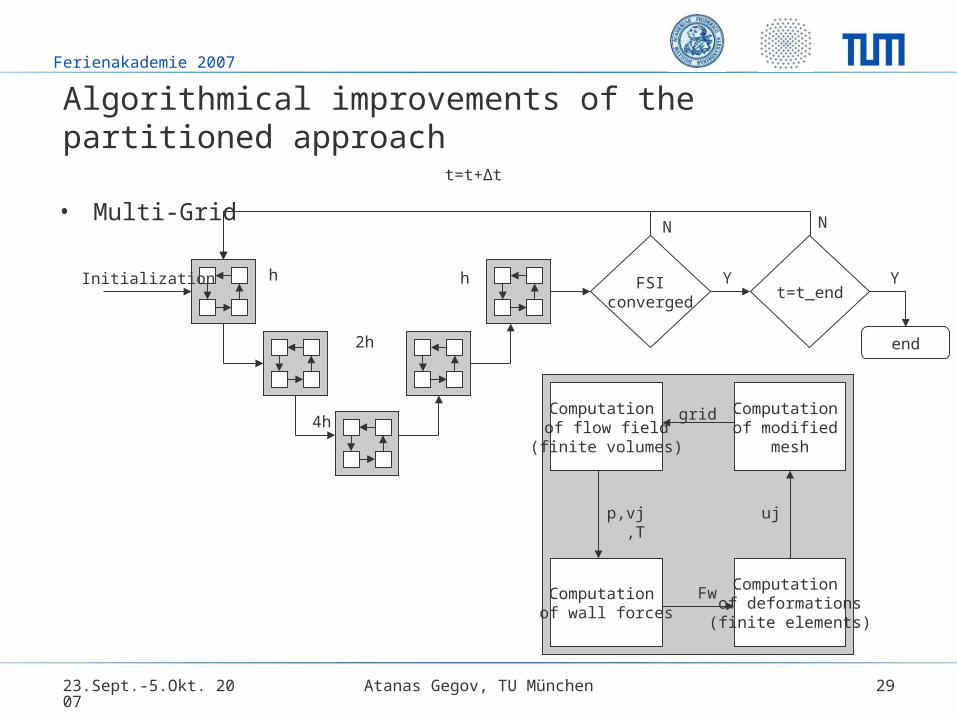
• Multi-Grid
– makes subiterations, but the they are done one more than one grids
• from the top-level (the main grid where the FSI has to be solved) down to levels with lower resolution
– iteration less expensive due to the reduced dimension
• gathered information is propagated again to the top levels
– makes therefore their iterations more efficient
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 29
Ferienakademie 2007
Algorithmical improvements of the partitioned approach
• Multi-Grid
FSIconverged
end
h h
2h
4h
Initializationt=t_end
N
Y
N
Y
t=t+Δt
Computation of flow field
(finite volumes)
Computation of modified
mesh
Computation of wall forces
Computation of deformations(finite elements)
grid
Fw
p,vj,T uj
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 30
Ferienakademie 2007
Algorithmical improvements of the partitioned approach
• Multi-Grid
– multiple grids have to be created
• very complex, if generated manually (with generator tool)
• involving hierarchical approach (e.g octree) is better
• therefore, although the idea of Multi-Grid is good, it is not so easy to be realized in practical applications
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 31
Ferienakademie 2007
Algorithmical improvements of the partitioned approach
• Interface-GMRES/Newton-Krylov
– Generalized Minimal RESidual
– The nonlinear problem Cż = ż • Cż –ż = 0 • Rż=0 with R=C-I
– After some transformations: R’ (zi)*(zi-zi+1) =R (zi)
A * x = b
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 32
Ferienakademie 2007
Algorithmical improvements of the partitioned approach
• Interface-GMRES/Newton-Krylov
– A*x=b solved by the GMRES method
• iterative method for the numerical solution of a system of linear equations
– approximates the solution by the vector in a Krylov subspace with minimal residual
– every subspace contained in the next subspace, the residual decreases monotonically in every iteration
– after m iterations (m - size of A) the Krylov space Km = Rm (exact solution found)
– however, after a small number of iterations (relative to m), the vector xn already a good approximation
– GMRES method developed by Yousef Saad and Martin H. Schultz in 1986
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 33
Ferienakademie 2007
Algorithmical improvements of the partitioned approach
• Interface-GMRES/Newton-Krylov
– Further improvement
• reuse of Krylov vectors in subsequent Newton steps => Interface-GMRESR
=> can result in considerable computational savings
(example for z with two points)
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 34
Ferienakademie 2007
Algorithmical improvements of the partitioned approach
• Interface-GMRES/Newton-Krylov
– Further improvement
• disadvantage: need of storing the search-direction vectors used by now (N, if problem N-dimensional)
• advantage: less Newton- subiterations (evaluations of R) needed => significant increase in efficiency
• computational expense of Interface-GMRESR method may be comparable to loosely-coupled partitioned methods (single fluid and structure solution per time step) by more stability and accuracy
(example for z with two points)
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 35
Ferienakademie 2007
Outline
• What is FSI
• Different approaches for solving FSI problems
• Algorithmical improvements of the partitioned approach
• How partitioned FSI can be realized – FSI*ce
– Requirements
– Design
– FSI*ce in use
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 36
Ferienakademie 2007
How partitioned FSI can be realized – FSI*ce
• Requirements
– Exisiting • CFD ( computational fluid dynamics, viz. fluid solver program ) • CSD ( computational structure dynamics, viz. structure solver program)
– “plug-in” mechanism for the CFD/CSD programs, simple replacement ability for the components
– implementation of the coupling schema outside from the CFD/CSD simulation programs
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 37
Ferienakademie 2007
How partitioned FSI can be realized – FSI*ce
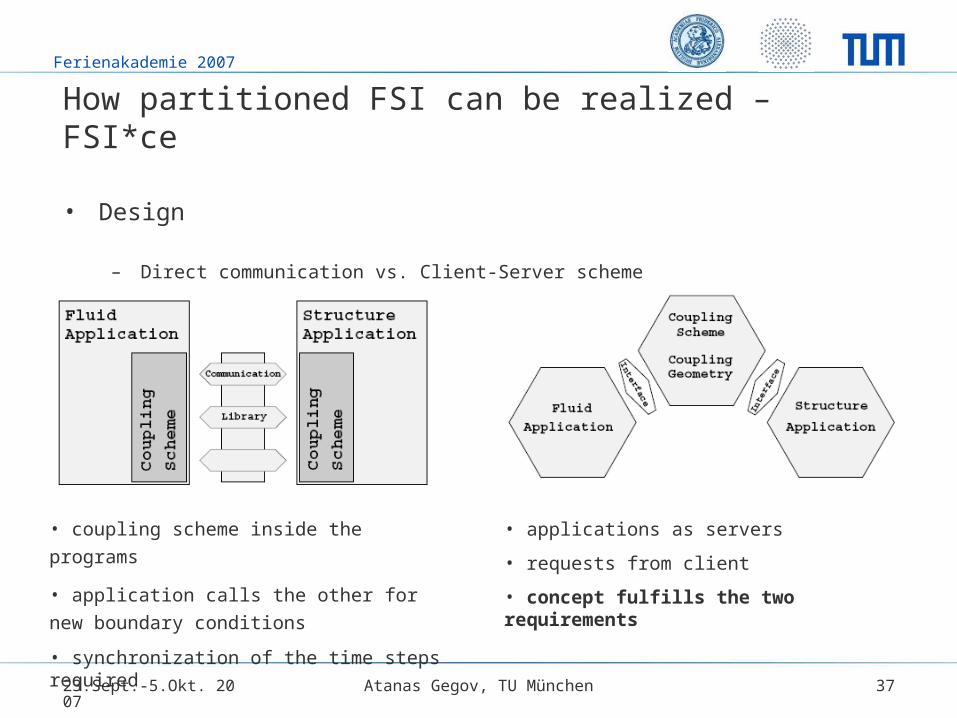
• Design
– Direct communication vs. Client-Server scheme
• coupling scheme inside the programs
• application calls the other for new
boundary conditions • synchronization of the time steps required
• applications as servers
• requests from client
• concept fulfills the two requirements

23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 38
Ferienakademie 2007
How partitioned FSI can be realized – FSI*ce
• Design
– independent representation of the coupling geometry
• Vertex-edge-face Graph (vef-Graph) – Closed body (airplane, u-boat)
• Data structure FSI_mesh stores– coordinates – data associated with the vertices or the faces
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 39
Ferienakademie 2007
How partitioned FSI can be realized – FSI*ce
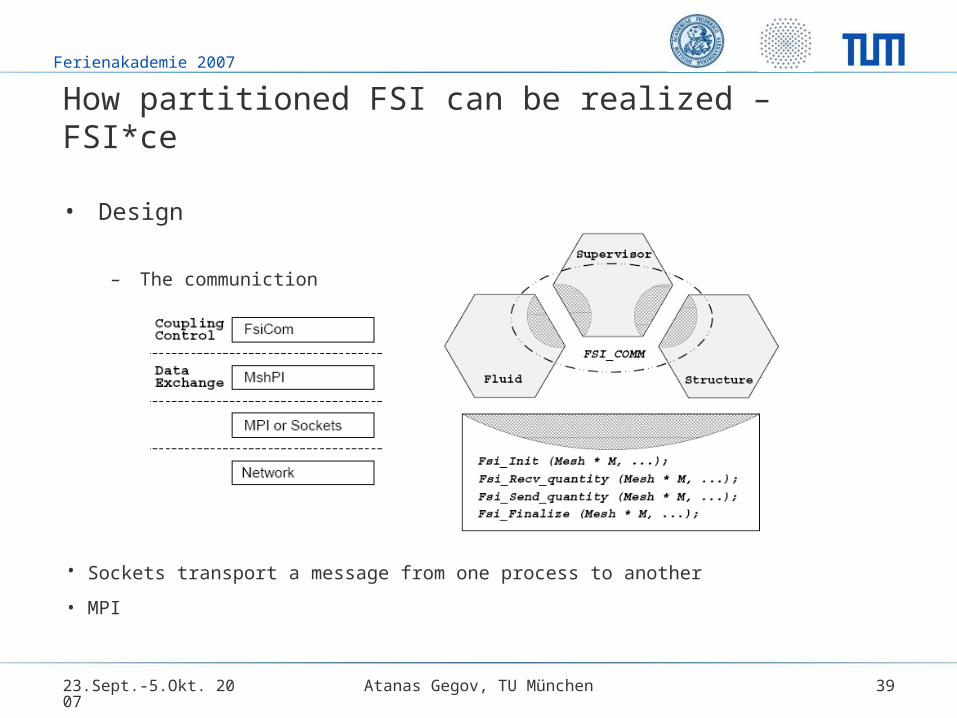
• Design
– The communiction
• Sockets transport a message from one process to another • MPI
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 40
Ferienakademie 2007
How partitioned FSI can be realized – FSI*ce
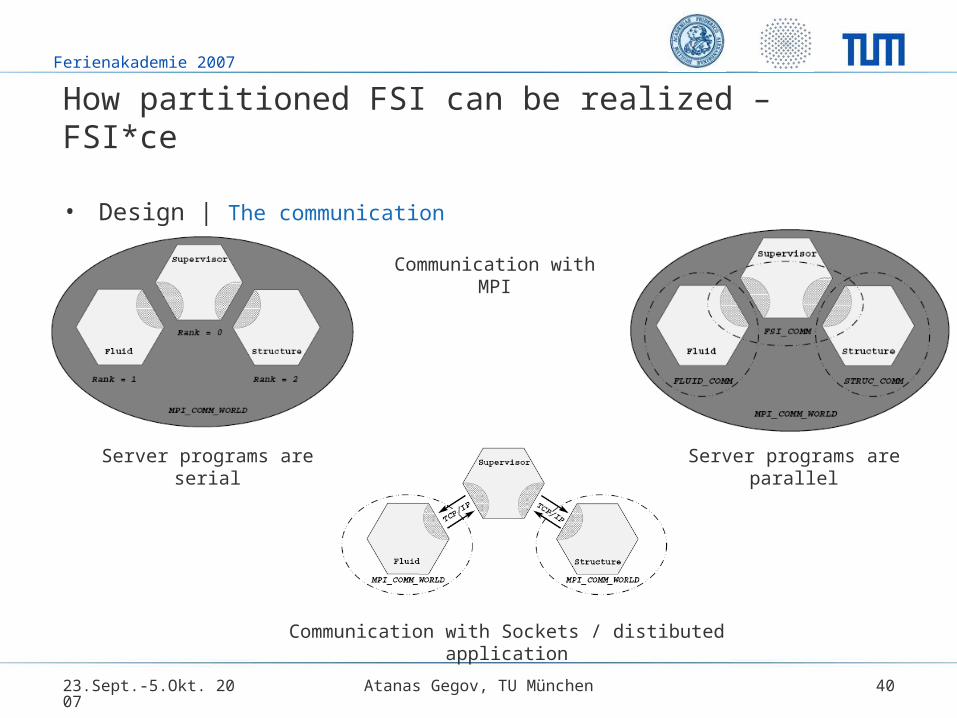
• Design | The communication
Server programs are serial Server programs are parallel
Communication with Sockets / distibuted application
Communication with MPI
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 41
Ferienakademie 2007
How partitioned FSI can be realized – FSI*ce
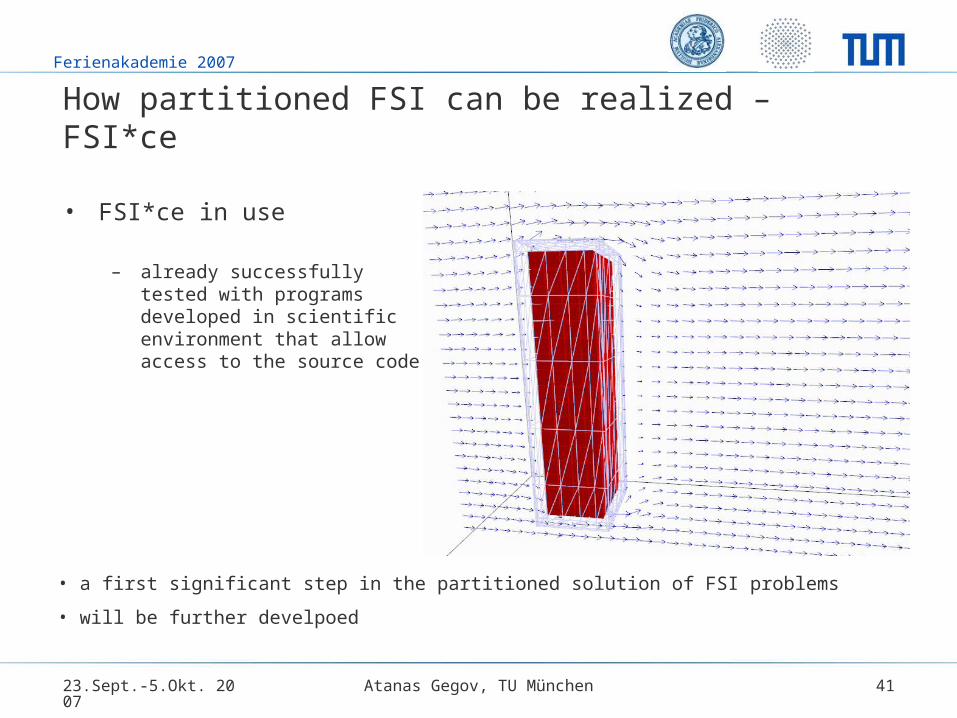
• FSI*ce in use
– already successfully tested with programs developed in scientific environment that allow access to the source code
• a first significant step in the partitioned solution of FSI problems
• will be further develpoed
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 42
Ferienakademie 2007
Bibliography (I)
• Books:– “Efficient Numerical Methods for Fluid-Structure Interaction” by Christian
Michler, Netherlands 2005
• Papers:– “Partitioned analysis of coupled mechanical systems” by Carlos A. Felippa, K.C.
Park, Charbel Farhat, USA 1999 – Paper about FSIce (title to be defined) by TUM Lehrstuhl V (Dipl.-Geophys.
Markus Brenk), Germany, to appear
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 43
Ferienakademie 2007
Bibliography (II)
• Internet:– FSI in general: http://www.win.tue.nl/fsi/– Eulerian and Lagrangian fluid description: http://numerik.iwr.uni-
heidelberg.de/Research/dunne.html– Tacoma Narrows Bridge: http://en.wikipedia.org/wiki/Tacoma_Narrows_Bridge– Hydraulic ram pump: http://schou.dk/animation/– Newton’s method: http://en.wikipedia.org/wiki/Newton's_method– Partition solution of coupled systems:
http://www.inf.bauwesen.tu-muenchen.de/~kollmannsberger/SoftLab2005CoupledSystems/Files/third_presentation.ppt
– GMRES approach: http://de.wikipedia.org/wiki/GMRES-Verfahren– GMRES approach: http://en.wikipedia.org/wiki/GMRES– Krylov subspace: http://de.wikipedia.org/wiki/Krylow-Unterraum– Linear span: http://de.wikipedia.org/wiki/Lineare_H%C3%BClle– Forschergruppe 493: http://fsw.informatik.tu-muenchen.de/index.php– MPI exercises:
http://www-unix.mcs.anl.gov/mpi/tutorial/mpiexmpl/contents.html
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 44
Ferienakademie 2007
Thank you for your attention!
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 45
Ferienakademie 2007
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 46
Ferienakademie 2007
Backup slides
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 47
Ferienakademie 2007
Algorithmical improvements of the partitioned approach
• Interface-GMRES/Newton-Krylov
– Further improvement
• reuse of Krylov vectors in subsequent Newton steps => Interface-GMRESR
• once vector reused, search space formally no longer a Krylov space => search directions do not necessarily constitute ‘preferential’ search directions
• typically fewer Krylov vectors added to the reused space than generated for a reconstructed Krylov space
=> can result in considerable computational savings
(example for z with two points)
23.Sept.-5.Okt. 2007 Atanas Gegov, TU München 48
Ferienakademie 2007
How partitioned FSI can be realized – FSI*ce
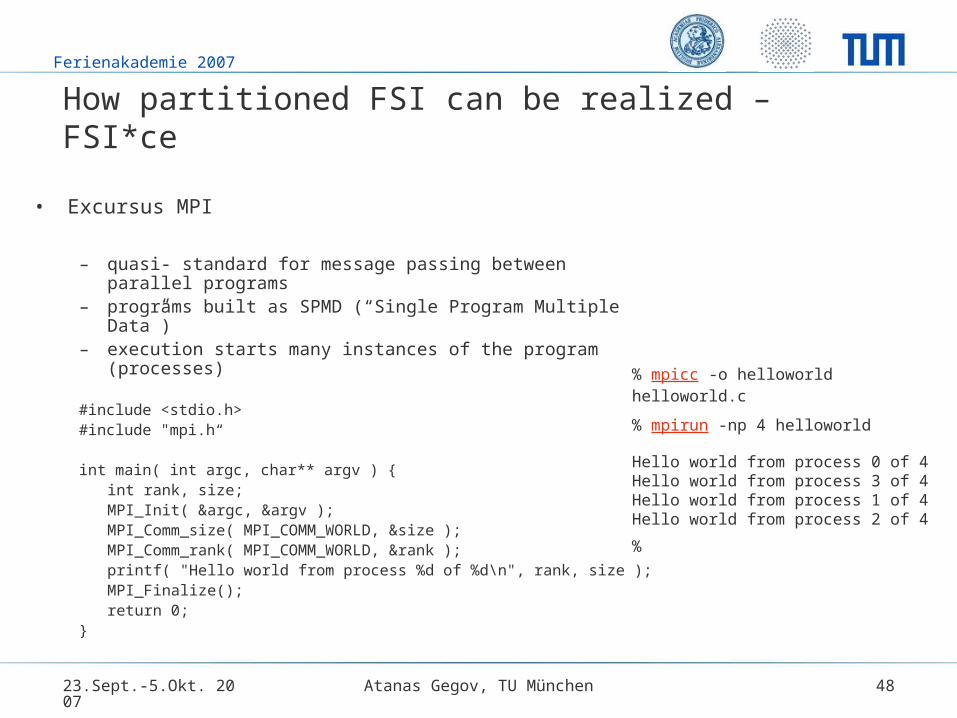
• Excursus MPI
– quasi- standard for message passing between parallel programs
– programs built as SPMD (“Single Program Multiple Data”) – execution starts many instances of the program
(processes)
#include <stdio.h> #include "mpi.h“ int main( int argc, char** argv ) {
int rank, size; MPI_Init( &argc, &argv ); MPI_Comm_size( MPI_COMM_WORLD, &size ); MPI_Comm_rank( MPI_COMM_WORLD, &rank ); printf( "Hello world from process %d of %d\n", rank, size ); MPI_Finalize(); return 0;
}
% mpicc -o helloworld helloworld.c
% mpirun -np 4 helloworld
Hello world from process 0 of 4 Hello world from process 3 of 4 Hello world from process 1 of 4 Hello world from process 2 of 4
%





























