Embed Size (px)
Citation preview

1Abstract— Technologies for the monitoring of structural components, such as strain gauges and fiber optics, are commonly used when information is sought on the state of displacements that a structural component is subjected to. Both techniques require cabling, producing various adversities in their applications. Thus, new wireless technologies have been gaining space for remote monitoring, either through antennas or through unmanned aerial vehicles. Wireless sensors, using radio frequency identification (RFID) technology, are attractive means of getting around some of these adversities. These sensors are formed by an antenna and an integrated RFID component. When attached to a component subject to external loading it will deform. This deformation will lead to a change in its resonance frequency. In this way, depending on the type of load, there will be a response change. For the development of the sensor, the Taconic TLY-5 material was used, with which a label was conditioned using a nationally manufactured RFID component (CI). For the validation of the sensor, a numerical study was carried out by the finite element method (FEM) and, after the sensor was made, a mechanical tensile test on the plate. As the displacements are applied, the reading distance data is collected and related. The data obtained in the simulation showed a linear relationship between displacement and resonance frequency. Experimental results show s similar trend. From these results it seems that the sensor can be a good alternative for monitoring structures in which large displacements are applied.
Keywords— Displacement Sensor, RFID, Metallic structures.
I. INTRODUÇÃO
struturas e componentes metálicos de engenharia são constantemente submetidas a esforços com cargas altas e cíclicas. Falhas de operação e nucleação de trincas podem
ter sua origem devido à estes esforços. A detecção e prevenção destes problemas através de técnicas de monitoramento de estruturas são cada vez mais essenciais. Dentre as novas técnicas, se encontram os sensores com RFID, uma vez que este tipo de método que não exige cabeamento e possui alta probabilidade de detecção[1]. Buscando novas aplicações em análise de integridade estrutural e soluções eficientes e econômicas, se faz necessário o desenvolvimento contínuo destas novas técnicas.
Novos sensores de deformação sem fio vêm sendo desenvolvidos fazendo uso de técnicas de radiofrequência (RF). O mecanismo base de funcionamento deste sensor consiste que um circuito ressonante ao sofrer tensão mecânica,
M. F. Kuhn, Laboratório de Metalurgia Física (LAMEF) - PPGE3M/UFRGS, Porto Alegre, Brasil, [email protected] G. P. Breier, CEITEC S.A. semiconductors, Porto Alegre, Brasil, [email protected] T. Clarke, Laboratório de Metalurgia Física (LAMEF) - PPGE3M/UFRGS, Porto Alegre, Brasil, [email protected]
sua frequência de ressonância eletromagnética também varia [2].
O RFID é um componente integrado (CI), tipicamente integrado a uma antena, constituindo uma etiqueta e é utilizado para identificação de objetos. Neste trabalho, por utilizar uma etiqueta passiva, a fonte de energia da etiqueta e troca de dados é realizado através de ondas eletromagnéticas. Como já exposto o sensor é composto de duas partes; uma antena e um CI. A antena coleta energia da onda eletromagnética e transmite para o CI, onde ocorre a modulação do sinal e posterior reflexão [3].
O método de elementos finitos (MEF) é um método numérico aproximado para análise de diversos fenômenos físicos que ocorrem em meios contínuos. Esses elementos são descritos por equações diferenciais e resolvidos por modelos matemáticos.
O presente trabalho tem como principal objetivo desenvolver e validar numericamente e experimentalmente um sensor passivo e sem fio para monitoramento remoto de deslocamentos em estruturas metálicas.
II. MATERIAIS E MÉTODOS
O pacote comercial de simulação por elementos finitos
COMSOL Multiphysics foi utilizado, este software permite o acoplamento das equações governantes de diferentes fenômenos físicos, permitindo a realização das análises mecânicas e de radiofrequência. Primordialmente, ao se iniciar um projeto de antena deve-se definir o local de sua aplicação, uma vez que o meio e o local de aplicação possuem grandes influências para parâmetros fundamentais das antenas, tais como, frequência de ressonância e ganho[4].
O sensor será posicionado sobre estruturas metálicas dessa forma necessita-se definir um tipo de antena adequada. O tipo de antena selecionado foi microstrip patch, pois possui um plano de terra que reduz os efeitos deletérios aos parâmetros das antenas [5]. A banda de frequência de operação escolhida foi UHF 860-960MHz e o CI CTC130001, fornecido pela empresa CEITEC S.A. O circuito integrado está de acordo com as especificações do EPCGlobal Class 1 Gen 2.
Inicialmente a antena baseou-se em um modelo de PIFA, Planar Inverted-F antenna, apresentada em [6]. Algumas alterações como a introdução de vias e dimensões dos slots foram realizadas. O material da antena foi TACONIC TLY-5, espessura de 0,76mm, com dupla face de cobre 17,5 µm. Material pertencente a uma linha de laminados de resinas de fibra de vidro/PTFE, exibe excelentes performances dimensionais e elétricas. Possui constante dielétrica de 2,2, módulo de elasticidade de 9,65 GPa e coeficiente de Poisson de 0,21. A antena foi posicionada sob uma placa de alumínio da liga 5052-H34, uma liga aplicada na indústria naval, com as seguintes dimensões 210 x100 x 2 mm. A liga de alumínio possui módulo de elasticidade de 72 GPa e coeficiente de
E
Passive Wireless Sensor for Displacement Monitoring in Metal Structures
M. F. Kuhn, G. P. Breier and T. Clarke
IEEE LATIN AMERICA TRANSACTIONS, VOL. 16, NO. 5, MAY 2018 1353

Poisson de 0,33. As dimensões em milímetros do sensor são apresentadas na Fig. 1.
Figura 1 - Dimensões do sensor em mm.
O software possui diversos módulos de análise e dentro destes módulos diversas físicas. Neste trabalho três módulos foram utilizados, Structural Mechanics, Radio Frequency e Mathematics. Dentre suas físicas foram utilizadas a Solid Mechanics, Moving Mesh e Electromagnetic Waves- Frequency Domain. Em modelos eletromagnéticos deve-se adicionar um volume de material de no mínimo um comprimento de onda ao redor do objeto de análise. O ar foi adicionado nesta simulação e a parte externa desse volume foi caracterizada como uma perfectly matched layer, um domínio que minimiza a reflexão das ondas, semelhante ao que ocorre em uma câmara anecóica.
Um dos parâmetros mais importantes de uma etiqueta, que a partir desse momento é nominada como tag, que é o sensor proposto, é a distância de leitura, assim este parâmetro foi escolhido para ser a referência para esta análise. A máxima distância de leitura teórica pode ser obtida através da equação de transmissão no espaço-livre de Friis, Equação (1), [7, 8]. A frequência correspondente a máxima distância de leitura pode ser chamada de frequência de ressonância.
(1)
Dado que rmax é a distância máxima de leitura, λ é o comprimento de onda, Pr é a potência transmitida pelo leitor,
Gr ganho da antena do leitor, Ga ganho da tag, é o coeficiente de reflexão de potência e Pth é a mínima potência requerida para ligar o CI, que pode ser representada pela sensibilidade do CI [9]. O coeficiente de reflexão de potência é obtido a partir da Equação (2). Onde Zc é a impedância do CI, Za é a impedância da antena e Za* é o complexo conjugado da impedância da antena.
(2)
Na física Solid Mechanics foi iniciado um estudo paramétrico, deslocamentos uniaxiais de 0 µm até 2000 µm foram aplicados na chapa de alumínio com passos de 200 µm, como mostra Fig. 2. Após aplicado os deslocamentos a física Moving Mesh, permite a reconstrução da malha deformada em um objeto deformado. Com a obtenção do objeto deformado a física Electromagnetic Waves- Frequency Domain realiza a
análise da frequência. Nesta análise são aplicadas as condições de contorno Lumped Port e Perfect Electric Conductor. Na condição de contorno Lumped Port uma área é selecionada como o local para excitação e aplica-se a impedância desejada, neste trabalho foi aplicado o valor de 50 ohms. Toda as partes de cobre do sensor foram modeladas como Perfect Electric Conductor, pois estas são geometricamente muito finas e são muita mais espessas que a profundidade de pele na frequência de 915 MHz. Este tipo de superfície é caracterizada por não sofrer perdas. Irá refletir 100% da onda incidente [10]. A condição de contorno Far-Field Domain foi utilizada para obter o diagrama de radiação e o valor do ganho da tag. Ao fim de todas estas definições, aplica-se a malha com elementos tetraédricos no modelo.
Figura 2 - Aplicação dos deslocamentos.
Definiu-se um estudo com dois passos, um estacionário e
outro no domínio da frequência. Assim o intervalo de frequência de 860 à 960 MHz, referente a banda UHF, foi escolhido para uma análise inicial, com um passo de 1 MHz. À medida que se verificou a região onde o pico de ressonância estava centrado, foi reduzido o passo de frequência nesta região, como apresentado na Fig. 3 na área mais escura.
Figura 3 - Região de análise do resultado.
Os resultados que foram obtidos da simulação são o ganho
da antena, diagrama de radiação e o valor do coeficiente de reflexão, obtido de forma análogo a [11], todos em função da frequência e para cada deslocamento aplicado. Com estes resultados é possível obter a máxima distância de leitura teórica para tag para cada frequência analisada, aplicando a Equação 1. Assim pontos de máxima distância de leitura teórica em função da frequência são plotados. Após isso gera-se uma curva através de uma regressão gaussiana de 2 termos, função escolhida devido a melhor ajuste da curva para os pontos obtidos. Destas regressões o valor máximo da máxima distância de leitura teórica é obtido, este valor corresponde a uma frequência e se assume que esta frequência é a frequência de ressonância, como detalhado em Fig. 4. Logo, para cada
1354 IEEE LATIN AMERICA TRANSACTIONS, VOL. 16, NO. 5, MAY 2018
deslocamento aplicado se executa a metodologia descrita anteriormente. Assim após obter a frequência de ressonância para todos os deslocamentos propostos, uma regressão dos valores de frequência de ressonância em função dos deslocamentos é gerada. Todos os dados foram tratados utilizando o software MATLAB.
Figura 4 - Regressão e Frequência de Ressonância.
Após a etapa de simulação numérica foi realizada a prototipação da placa para o sensor e após isso foi realizado a etapa do Flip Chip, processo que realiza a adesão de CI à antena. Essa tag sensor foi colado a uma chapa de alumínio utilizando a cola Loctite® 496, indicada para união de substratos metálicos. No outro lado da placa foi colado um strain gauge, KYOWA ® – KFG-1-120-C1-11, para monitoramento de deformações com auxílio do sistema de aquisição de dados Spyder 8®.
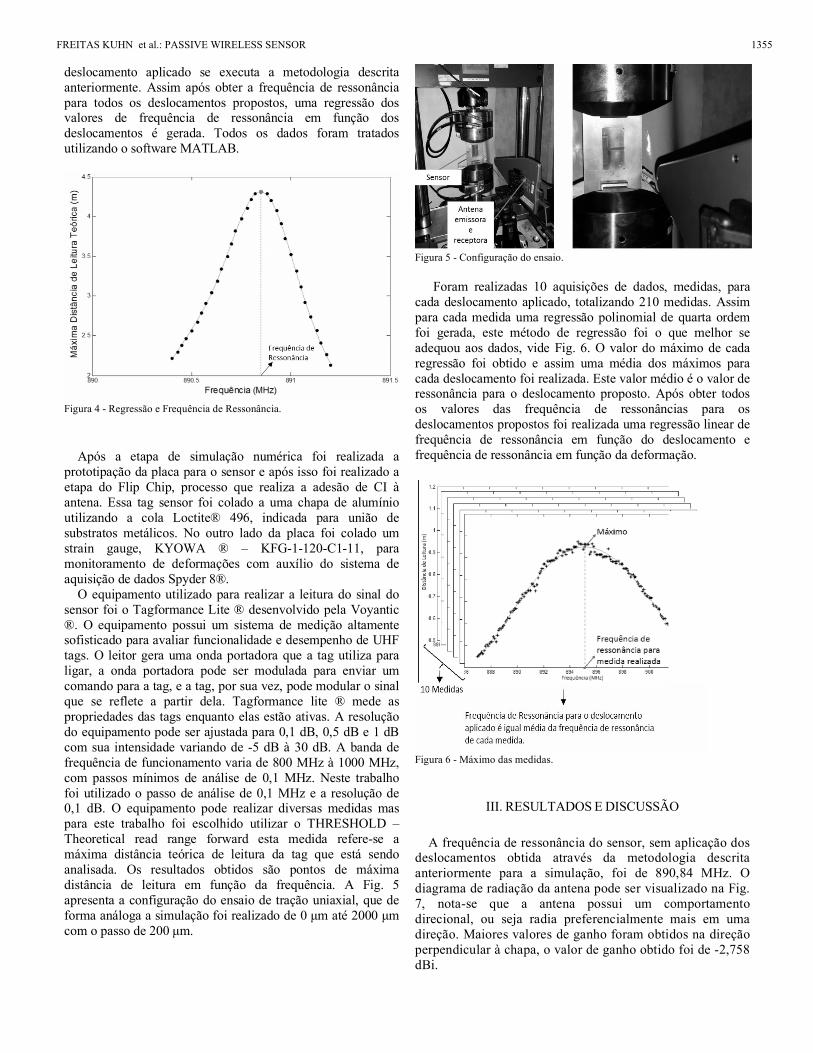
O equipamento utilizado para realizar a leitura do sinal do sensor foi o Tagformance Lite ® desenvolvido pela Voyantic ®. O equipamento possui um sistema de medição altamente sofisticado para avaliar funcionalidade e desempenho de UHF tags. O leitor gera uma onda portadora que a tag utiliza para ligar, a onda portadora pode ser modulada para enviar um comando para a tag, e a tag, por sua vez, pode modular o sinal que se reflete a partir dela. Tagformance lite ® mede as propriedades das tags enquanto elas estão ativas. A resolução do equipamento pode ser ajustada para 0,1 dB, 0,5 dB e 1 dB com sua intensidade variando de -5 dB à 30 dB. A banda de frequência de funcionamento varia de 800 MHz à 1000 MHz, com passos mínimos de análise de 0,1 MHz. Neste trabalho foi utilizado o passo de análise de 0,1 MHz e a resolução de 0,1 dB. O equipamento pode realizar diversas medidas mas para este trabalho foi escolhido utilizar o THRESHOLD – Theoretical read range forward esta medida refere-se a máxima distância teórica de leitura da tag que está sendo analisada. Os resultados obtidos são pontos de máxima distância de leitura em função da frequência. A Fig. 5 apresenta a configuração do ensaio de tração uniaxial, que de forma análoga a simulação foi realizado de 0 µm até 2000 µm com o passo de 200 µm.
Figura 5 - Configuração do ensaio.
Foram realizadas 10 aquisições de dados, medidas, para cada deslocamento aplicado, totalizando 210 medidas. Assim para cada medida uma regressão polinomial de quarta ordem foi gerada, este método de regressão foi o que melhor se adequou aos dados, vide Fig. 6. O valor do máximo de cada regressão foi obtido e assim uma média dos máximos para cada deslocamento foi realizada. Este valor médio é o valor de ressonância para o deslocamento proposto. Após obter todos os valores das frequência de ressonâncias para os deslocamentos propostos foi realizada uma regressão linear de frequência de ressonância em função do deslocamento e frequência de ressonância em função da deformação.
Figura 6 - Máximo das medidas.
III. RESULTADOS E DISCUSSÃO A frequência de ressonância do sensor, sem aplicação dos
deslocamentos obtida através da metodologia descrita anteriormente para a simulação, foi de 890,84 MHz. O diagrama de radiação da antena pode ser visualizado na Fig. 7, nota-se que a antena possui um comportamento direcional, ou seja radia preferencialmente mais em uma direção. Maiores valores de ganho foram obtidos na direção perpendicular à chapa, o valor de ganho obtido foi de -2,758 dBi.
FREITAS KUHN et al.: PASSIVE WIRELESS SENSOR 1355

Figura 7 - Diagrama de Radiação.
Pode-se verificar através da Fig. 8 que com a aplicação
dos deslocamentos na chapa de alumínio os picos das curvas de distância de leitura são deslocados para a esquerda na simulação. Podendo atribuir este fato ao aumento dimensional gerado pela deformação no sensor.
Figura 8 - Curvas distância de leitura para deslocamentos distintos.
A partir das frequências de ressonâncias correspondentes
a todos os deslocamento da simulação foi gerada uma regressão linear de frequência de ressonância em função dos deslocamentos, vide Fig. 9. Um alto grau de linearidade foi observado, com o valor de 0,9995 para o coeficiente de determinação. Este alto valor representa que os dados obtidos pelo modelo numérica podem ser representados de forma linear. Resultados similares aos trabalhos [3, 12].
Figura 9 - Regressão Simulação.
Para os resultados experimentais foi obtida uma frequência
de ressonância de 894,8 MHz, valor bem próximo ao simulado. Valores bem inferiores de distância de leitura, em torno de 1 metro, foram observados, podendo ser explicado por perdas que diversos fatores como cabos e reflexões geram, e além do mais, a Equação (1) não leva em consideração estas perdas. Na análise de regressão foram encontrados comportamentos com menor tendência linear que a simulação tanto em função da deformação, quanto dos deslocamentos, vide Fig. 10 e 11. A não ocorrência de uma maior correlação pode estar relacionada a uma largura de banda bem superior a largura obtida na simulação. O aumento do fator de qualidade do sensor pode ser uma alternativa para uma melhor representatividade da regressão. Um valor de 0,82 no coeficiente de determinação encontrado em ambas as análises pode ser utilizado como um indicativo de uma tendência, mas a sensibilidade do sensor deve ser aumentada para buscar maior confiabilidade nos resultados.
Figura 10 - Regressão deformação.
887.5 888 888.5 889 889.5 890 890.5 8912.5
3
3.5
4
4.5
Frequência (MHz)
Máx
ima
Dis
tânc
ia d
e Le
itura
Teó
rica
(m)
0 um400 um800 um1200 um1600 um2000 um
0 500 1000 1500 2000888
888.5
889
889.5
890
890.5
891
Deslocamento (um)
Freq
uênc
ia d
e R
esso
nânc
ia (M
Hz)
0 1000 2000 3000 4000 5000 6000893
893.5
894
894.5
895
895.5
Deformação (um)
Freq
uênc
ia d
e R
esso
nânc
ia (M
Hz)
1356 IEEE LATIN AMERICA TRANSACTIONS, VOL. 16, NO. 5, MAY 2018

Figura 11 - Regressão deslocamento.
IV. CONCLUSÃO
O presente estudo numérico do sensor comprovou a
capacidade de detectar pequenos deslocamentos, em torno de 200 µm. Mostrando um comportamento linear entre os deslocamentos uniaxiais e a variação da frequência de ressonância. A forte tendência linear na aplicação dos deslocamentos uniaxiais, com um valor de 0,9995 no coeficiente de determinação, mostra que a regressão consegue representar 99,95% dos dados obtidos, um excelente resultado. O estudo experimental apontou diversas características que devem ser observadas, dentre elas a sensibilidade da técnica, que está ligada ao fator de qualidade do sensor. Um alto fator de qualidade para o sensor se torna essencial para obtenção de dados mais confiáveis, já que possibilita, com melhor resolução, verificar os deslocamentos dos pontos. Logo, devido aos resultados apresentados na parte experimental, na simulação e a crescente necessidade de desenvolvimento de aplicações de monitoramento remoto, o sensor se mostrou solução viável, consideravelmente versátil e deve-se continuar o aperfeiçoamento desta técnica.
AGRADECIMENTOS
Concedo os agradecimentos à Universidade Federal do Rio Grande do Sul, UFRGS, pelo oportunidade de ensino. Ao Laboratório de Metalurgia Física – LAMEF – pelo apoio financeiro e tecnológico. Ao Prof. Thomas Clarke pelo apoio e confiança. Também aos colegas que de alguma forma contribuíram neste desenvolvimento. Ao CNPq pelo apoio financeiro.
REFERÊNCIAS
[1] Yi X., Fang C. e Cooper J. “Strain Sensing through a Passive Wireless Sensor Array”. 20th Analysis and Computation Specialty Conference, p. 117-126, 2012.
[2] Thai T., Aubert H. e Tentzeris M.“A Newly Developed Radio Frequency Wireless Passive Highly Sensitive Strain Transducer”. Limerick, SENSORS, IEEE, p. 211-214, 2011.
[3] Lantz G. “Crack Detection Using a Passive Wireless Strain Sensor. Georgia Tech Library, 2011. Disponível em: <https://smartech.gatech.edu/handle/1853/45773>. Acesso em: 12 dez. 2016.
[4] Dobkin D e Weigand S. “Environmental Effects on RFID Tag Antennas”, IEEE MTT-S International Microwave Symposium Digest, p. 4. , 2005.
[5] Ukkonen L., Sydanheirno L. e Kivikoski M. “A novel tag design using inverted-F antenna for radio frequency identification of metallic objects.” IEEE/Sarnoff Symposium on Advances in Wired and Wireless Communications, 2004.
[6] Marrocco. “The Art of UHF RFID Antenna Design: Impedance-Matching and Size-Reduction Techniques.” IEEE Antennas and Propagation Magazine, v. 50, p. 66-79, 2008.
[7] Yeoman S. e O’neill A. “Impedance Matching of Tag Antenna to Maximize RFID Read Ranges & Design Optimization.” Proceedings of the 2014 COMSOL, Cambrigde, 2014.
[8] Nikitin V. e Seshagiri R. “Power Reflection Coefficient Analysis for Complex Impedances in RFID Tag Design.” IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, v. 53, p. 2721-2725, Setembro 2005.
[9] Zuffanelli S. e Aguila, P. “A High-Gain Passive UHF-RFID Tag with Increased Read Range.” sensors, v. 16, p. 8, Julho 2016.
[10] Frei W. Comsol Blog. Comsol, 2015. Disponivel em: <https://br.comsol.com/blogs/modeling-metallic-objects-in-wave-electromagnetics-problems/>. Acesso em: 21 Dezembro 2016.
[11] Littmarck F. “NUMERICAL MODELING OF A UHF RFID TAG”. Comsol, 2015. Disponivel em: <https://br.comsol.com/blogs/evaluating-a-uhf-rfid-tag-design-with-simulation/>. Acesso em: 23 Janeiro 2017.
[12] Xiaohua Y. e Terence W. “Passive Wireless Smart-Skin Sensor using RFID-Based Folded Patch Antennas.” International Journal of Smart and Nano Materials, Vol. 2, No. 1, 22–38, 2011.
Matheus Freitas Kuhn recebeu o título de Engenheiro Metalúrgico em 2014 na UFRGS, atualmente estudante de doutorado no Programa de Pós- graduação em Engenharia de Minas, Metalúrgica e de Materiais – PPGE3M – UFRGS. Pertencente a linha de pesquisa do Grupo de Ensaios Não Destrutivos, GEND, do Laboratório de Metalurgia Física, Unidade Embrapii LAMEF. Área de pesquisa voltada para o
desenvolvimento de sensores utilizando técnicas de radiofrequência. http://lattes.cnpq.br/2355109641570222.
Thomas G. R. Clarke é engenheiro de materiais e M.Sc. em metalurgia pela UFRGS, e Ph.D. em Engenharia Mecânica pelo Imperial College de Londres. Atualmente é Professor no Programa de Pós- graduação em Engenharia de Minas, Metalúrgica e de Materiais (PPGE3M – UFRGS). Atua nas áreas de integridade estrutural, e inspeção e monitoramento por ensaios não-destrutivos na Unidade Embrapii LAMEF.
http://lattes.cnpq.br/0545785084290513
Guilherme Petry Breier é engenheiro eletricista e M.Sc em engenharia elétrica. Também possui doutorado em engenharia de produção pela Universidade Federal do Rio Grande do Sul (PPGEP – UFRGS). Atua no segmento de semicondutores na empresa CEITEC-S.A. http://lattes.cnpq.br/5314126022953423
0 500 1000 1500 2000893
893.5
894
894.5
895
895.5
Deslocamento (um)
Freq
uênc
ia d
e R
esso
nânc
ia (M
Hz)
FREITAS KUHN et al.: PASSIVE WIRELESS SENSOR 1357





























