Embed Size (px)
Citation preview

按照 PCI BUS-4 机·控制·摸轴电动 块
Macro5612B
Macro5612B是按照PCI BUS的电
动机·控制·电路板。
因为装载着4个Ampere制可编
程·脉冲电动机·控制LSI的
PPMC-312,
因此用1张电路板能实现4轴的电
动机控制。
能进行用简单的操作光滑的脉冲
输出。不用说支形驱动,指定了
任意2轴的软件直线插值动作
(INtime用driver)。
主要的特长
■4轴独立控制可能
■最高速度2Mpps
■最大输出脉冲数4,294,967,296脉冲(无限动作也可
能)
■直线加减速/ S字加减速/自由曲线加减速
■加速和减速时,设定可能分别的加减速弯曲
■现在位置计数器(32位)包藏
■编码器输入对应
■「POUT / DIR」「CW / CCW」输出对应
■限度等的输入信号绝缘方式
■由于软件的2轴直线插值动作(INtime driver)
■由于软件的限度信号逻辑设定可能
■由于软件的硬件复位可能
■动作途中的速度变更
■动作结束时挤进可能
■准备INtime 用driver
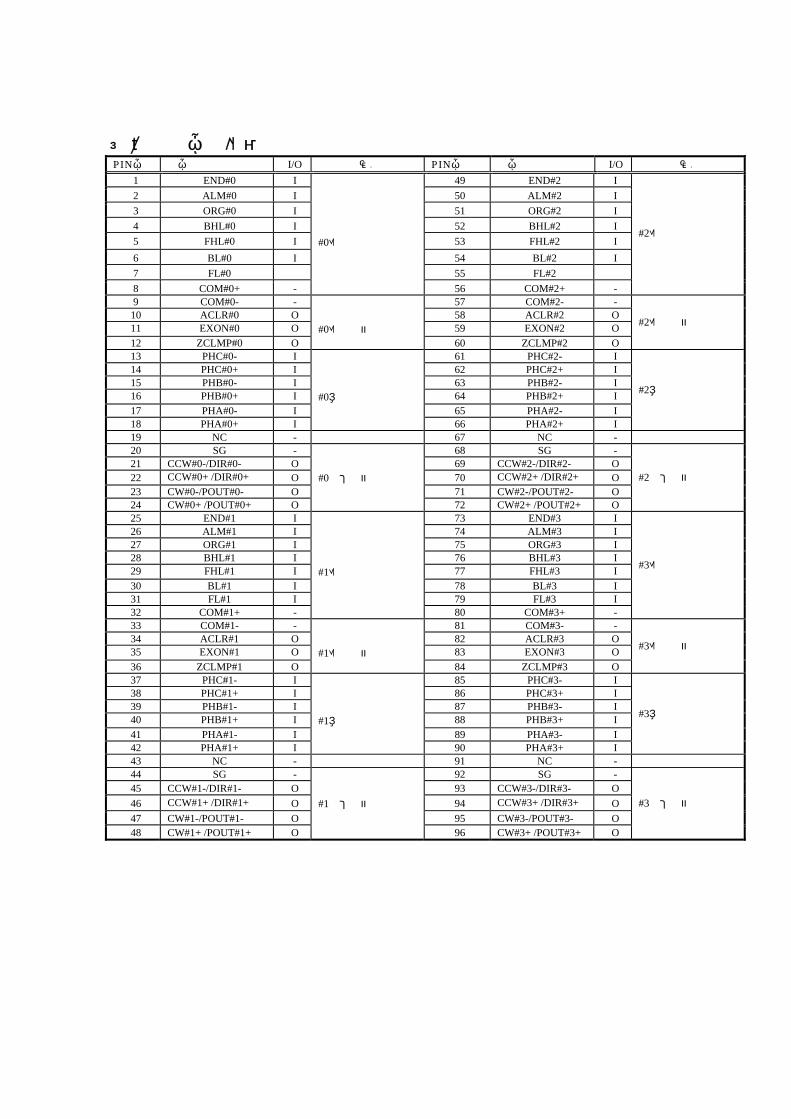
连接器信号一览表 PIN号码 信号名 I/O 机能 PIN号码 信号名 I/O 机能
1 END#0 I 49 END#2 I 2 ALM#0 I 50 ALM#2 I 3 ORG#0 I 51 ORG#2 I 4 BHL#0 I 52 BHL#2 I 5 FHL#0 I #0控制输入 53 FHL#2 I 6 BL#0 I 54 BL#2 I 7 FL#0 55 FL#2 8 COM#0+ - 56 COM#2+ -
#2控制输入
9 COM#0- - 57 COM#2- - 10 ACLR#0 O 58 ACLR#2 O 11 EXON#0 O #0控制输出 59 EXON#2 O 12 ZCLMP#0 O 60 ZCLMP#2 O
#2控制输出
13 PHC#0- I 61 PHC#2- I 14 PHC#0+ I 62 PHC#2+ I 15 PHB#0- I 63 PHB#2- I 16 PHB#0+ I #0编码器输入 64 PHB#2+ I 17 PHA#0- I 65 PHA#2- I 18 PHA#0+ I 66 PHA#2+ I
#2编码器输入
19 NC - 67 NC - 20 SG - 68 SG - 21 CCW#0-/DIR#0- O 69 CCW#2-/DIR#2- O 22 CCW#0+ /DIR#0+ O #0脉冲输出 70 CCW#2+ /DIR#2+ O 23 CW#0-/POUT#0- O 71 CW#2-/POUT#2- O 24 CW#0+ /POUT#0+ O 72 CW#2+ /POUT#2+ O
#2脉冲输出
25 END#1 I 73 END#3 I 26 ALM#1 I 74 ALM#3 I 27 ORG#1 I 75 ORG#3 I 28 BHL#1 I 76 BHL#3 I 29 FHL#1 I #1控制输入 77 FHL#3 I 30 BL#1 I 78 BL#3 I 31 FL#1 I 79 FL#3 I 32 COM#1+ - 80 COM#3+ -
#3控制输入
33 COM#1- - 81 COM#3- - 34 ACLR#1 O 82 ACLR#3 O 35 EXON#1 O #1控制输出 83 EXON#3 O 36 ZCLMP#1 O 84 ZCLMP#3 O
#3控制输出
37 PHC#1- I 85 PHC#3- I 38 PHC#1+ I 86 PHC#3+ I 39 PHB#1- I 87 PHB#3- I 40 PHB#1+ I #1编码器输入 88 PHB#3+ I 41 PHA#1- I 89 PHA#3- I 42 PHA#1+ I 90 PHA#3+ I
#3编码器输入
43 NC - 91 NC - 44 SG - 92 SG - 45 CCW#1-/DIR#1- O 93 CCW#3-/DIR#3- O 46 CCW#1+ /DIR#1+ O #1脉冲输出 94 CCW#3+ /DIR#3+ O 47 CW#1-/POUT#1- O 95 CW#3-/POUT#3- O 48 CW#1+ /POUT#1+ O 96 CW#3+ /POUT#3+ O
#3脉冲输出

电气特性
脉冲输出信号(CW,CCW)的电气特性 项目 记号 Min Max 单位 条件
”H”水平输出电压 VOH 2.5 V IOL =-20mA
”L”水平输出电压 VOL 0.5 V IOL = 20mA 控制输出信号(ACLR,EXON,ZCLMP)的电气特性 项目 记号 Min Max 单位 条件
集电极·发射极间电压 50 V
集电极电流 IC 20 Ma
”L”水平输出电压 VOL 0.3 V IC = 10mA 控制输入信号(END,ALM,ORG,BHL,FHL,BL,FL)的电气特性 项目 记号 Min Max 单位 条件
输入电源电压 VIN 4.5 13.2 V
”H”水平输入电压 VIH *1 - V
”L”水平输入电压 VIL - 1.5 V
*1 与电源电压一致.
编码器输入信号(PHA,PHB,PHC)的电气特性 项目 记号 Min Max 单位 条件
输入电压(-基准) VIN -5.1 5.1 V
开输入电压差 VON 2.6 V
关断输入电压差 VOFF 0.7 V
结构图


产品方法 控制器 PPMC-312 (Ampere制)× 4
应用 motor driver 自动控制电动机·drive
或脉冲电动机·driver
主机侧界面 使用 PCI Rev.2.2 (PLX 公司制 PCI9030 )
I/O 空间 作为 Macro5612 专用,64byte I/O 空间
挤进 1 水平
电动机 driver 侧界面 CW*,CCW*, POUT*,DIR*
PHA,PHB,PHC
ORG,FL,BL,FHL,BHL,ALM
END,EXON,ACLR,ACLMP
电动机 driver 连接器 PCR-E96LMDC (本多通信工业制)
电源 DC+5V±5%
消费电流 5v (PCI BUS 600mA(max)
使用条件 温度 0~60℃
湿度 30~85%
气氛 不含有腐蚀性煤气的大气中
基板尺寸 228W × 105.0H × 24.0T mm
选择品
Macro8612(终端表) 来自Macro5612B的高密度连接器的线路,用简单
的工作,
能转播为单线和绞合金属线。 电缆组套 连接Macro5612B和Macro8612,压接完毕的电缆和
连接器的组套。
准备如下。
·ACBL1000(电缆长:1公尺)
·ACBL1500(电缆长:1.5公尺)
·ACBL2000(电缆长:2 公尺)
连接器(电动机 driver 电缆用) 是与Macro5612B的电动机driver连接器适合的连
接器。
请选择如下。
·连接器:PCR-E96F系列(本多通信工业制)
·连接器套 PCS-E96 系列(本多通信工业制)