Embed Size (px)
Citation preview

Chapter 12. Partial Differential Equations (PDEs)曾柏軒 (Po-Hsuan Tseng)Department of Electronic Engineering
National Taipei University of Technology
[email protected] 18, 2020 1 / 25
...
.
...
.
...
.

Outline
1 Sec. 12.1 Basic Concepts of PDEs
2 Sec. 12.2 Modeling: Vibrating String, Wave Equation
3 Sec. 12.3 Solution by Separating Variables. Use of Fourier Series
2 / 25...
.
...
.
...
.

Outline
1 Sec. 12.1 Basic Concepts of PDEs2 Sec. 12.2 Modeling: Vibrating String, Wave Equation3 Sec. 12.3 Solution by Separating Variables. Use of Fourier Series
3 / 25...
.
...
.
...
.

12.1 Basic Concepts of PDEs
• A partial differential equation (PDE) is an equation involving one or more partialderivatives of an (unknown) function, call it u, that depends on two or more variables,often time t and one or several variables in space.
• The order of the highest derivative is called the order of the PDE.- Just as was the case for ODEs, second-order PDEs will be the most important ones inapplications.
• A PDE is linear if it is of the first degree in the unknown function u and its partialderivatives.
• We call a linear PDE homogeneous if each of its terms contains either u or one of itspartial derivatives.
4 / 25...
.
...
.
...
.

12.1 Basic Concepts of PDEs
Example 1 (Sec. 12.1 Example 1, Important Second-Order PDEs)
One-dimensional wave equation:∂2u∂t2
= c2∂2u∂x2
One-dimensional heat equation:∂u∂t
= c2∂2u∂x2
Two-dimensional Laplace equation:∂2u∂x2
+∂2u∂y2
= 0
Two-dimensional Poisson equation:∂2u∂x2
+∂2u∂y2
= f(x, y)
Two-dimensional wave equation:∂2u∂t2
= c2(∂2u∂x2
+∂2u∂y2
)Three-dimensional Laplace equation:
∂2u∂x2
+∂2u∂y2
+∂2u∂z2
= 05 / 25
...
.
...
.
...
.

12.1 Basic Concepts of PDEs
• In general, the totality of solutions of a PDE is very large.
• ∂2u∂x2
+∂2u∂y2
= 0
- Solutions include u = x2 + y2, u = ex cos y, u = sin x cosh y, u = ln(x2 + y2), ... etc.• Additional conditions arising from the problem:
- Boundary conditions: the solution u assume given values on the boundary of the region R- Initial conditions: when time t is one of the variables, u (or ut = ∂u/∂t or both) may beprescribed at t = 0
• The superposition theorem holds for a homogeneous linear ODE. For PDEs the situationis quite similar:
Theorem 2 (Sec. 12.1, Theorem 1, Fundamental Theorem on Superposition)If u1 and u2 are solutions of a homogeneous linear PDE in some region R, thenu = c1u1 + c2u2 with any constants c1 and c2 is also a solution of that PDE in theregion R
6 / 25...
.
...
.
...
.

12.1 Basic Concepts of PDEs
Example 3 (Sec. 12.1 Example 2, Solving uxx − u = 0 Like an ODE)Find solutions u of the PDE uxx − u = 0 depending on x and y.
• Since no y-derivatives occur, we can solve this PDE like u′′ − u = 0.• In Sec. 2.2 we would have obtained u = Aex + Be−x with constant A and B• Here A and B may be functions of y, so that the answer is
u(x, y) = A(y)ex + B(y)e−x
with arbitrary functions A and B.• We thus have a great variety of solutions. Check the result by differentiation.
7 / 25...
.
...
.
...
.

12.1 Basic Concepts of PDEs
Example 4 (Sec. 12.1 Example 3, Solving uxy = −ux Like an ODE)Find solutions u = u(x, y) of the PDE uxy = −ux.
Let ux = P,uxy = −ux ⇒ Py = −P ⇒ Py
P = −1 ⇒ dPdy
1P = −1
⇒ 1PdP = −dy
⇒∫
1PdP = −
∫dy
⇒ lnP = −y+ c̃(x)⇒ P = e−y+c̃(x) = c(x)e−y
⇒ u(x, y) =∫c(x)e−ydx = f(x)e−y + g(y) where f(x) =
∫c(x)dx
Here, f(x) and g(y) are arbitrary
8 / 25...
.
...
.
...
.

Outline
1 Sec. 12.1 Basic Concepts of PDEs2 Sec. 12.2 Modeling: Vibrating String, Wave Equation3 Sec. 12.3 Solution by Separating Variables. Use of Fourier Series
9 / 25...
.
...
.
...
.

12.2 Modeling: Vibrating String, Wave Equation
• We want to derive the PDE modeling small transverse vibrations of an elastic string, suchas a violin string
• We place the string along the x-axis, stretch it to length L, and fasten it at the ends x = 0and x = L
• We then distort the string, and at some instant, call it t = 0, we release it and allow it tovibrate
Problem 5 (Vibrating String Problem)Determine the vibrations of the string, to find its deflection u(x, t) at any point x andat any time t > 0
• u(x, t) will be the solution of a PDE that is the model of our physical system to be derived.
10 / 25...
.
...
.
...
.

12.2 Modeling: Vibrating String, Wave Equation
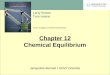
Figure 1: Deflected string at fixed time t
• Physical Assumptions:- Mass density is constant ρ- Perfectly elastic: does not offer any resistance to bending- Gravitational force on the string can be neglected- Every particle of the string moves strictly vertically- Deflection and slope at every point of the string always remain small
11 / 25...
.
...
.
...
.

12.2 Modeling: Vibrating String, Wave Equation
• Derivation of the PDE of the Model (“Wave Equation”) from Forces:1 No horizontal motion: net horizontal force is zero
T1 cosα = T2 cosβ = T
2 Newton’s 2nd Law (F = ma)
T2 sinβ − T1 sinα = ρ△x∂2u∂t2
⇒ T2 sinβT2 cosβ
− T1 sinαT1 cosα
= tanβ − tanα =ρ△xT
∂2u∂t2
Notice that tanβ = ∂u∂x
∣∣x+△x and tanα = ∂u
∂x
∣∣x are slope at x+△x and x
1
△x
(∂u∂x
∣∣∣∣x+△x
−∂u∂x
∣∣∣∣x
)=
ρ
T∂2u∂t2
When△x → 0,∂2u∂x2
=1
c2∂2u∂t2
, where c2 = T/ρ12 / 25
...
.
...
.
...
.

Outline
1 Sec. 12.1 Basic Concepts of PDEs2 Sec. 12.2 Modeling: Vibrating String, Wave Equation3 Sec. 12.3 Solution by Separating Variables. Use of Fourier Series
13 / 25...
.
...
.
...
.

12.3 Solution by Separating Variables. Use of Fourier Series
Problem 6 (One-dimensional wave equation)• One-dimensional wave equation for the unknown deflection u(x, t) of the string:
∂2u∂t2
= c2∂2u∂x2
c2 = T/ρ (1)
which satisfies two boundary conditions:
(a) u(0, t) = 0 (b) u(L, t) = 0 ∀t ≥ 0 (2)
and two initial conditions:
(a) u(x, 0) = f(x) (b)∂
∂tu(x, 0) = g(x) 0 ≤ x ≤ L (3)
14 / 25...
.
...
.
...
.

12.3 Solution by Separating Variables. Use of Fourier Series
Step 1. Method of separating variables: setting u(x, t) = F(x)G(t) to obtain two ODEsfrom the wave equation
u(x, t) = F(x)G(t)
⇒ ∂2u∂t2
= FG̈ and∂2u∂t2
= F′′G
FG̈ = c2F′′GG̈c2G
=F′′
FHence both sides must be constant
G̈c2G
=F′′
F= k
Two ordinary DEs can be obtained as
F′′ − kF = 0 (4)
G̈− c2kG = 0 (5)15 / 25
...
.
...
.
...
.

12.3 Solution by Separating Variables. Use of Fourier Series
Step 2. Satisfying the Boundary Conditions (2)We determine solutions F and G of (16) and (5) so that u = FG satisfies the boundaryconditions (2)
u(0, t) = F(0)G(t) = 0 and u(L, t) = F(L)G(t) = 0 ∀tIf G(t) = 0, then u = FG = 0, which is of no interest. Hence G(t) ̸= 0 Then the problem ofcombining with (2) becomes a sub-problem:
Problem 7F′′ − kF = 0, F(0) = F(L) = 0
• Assuming that k = 0, F(x) = ax+ b
⇒
{F(0) = b = 0
F(L) = aL+ b = 0
b = 0 ⇒ a = 0 ⇒ F = 0, which is of no interest16 / 25
...
.
...
.
...
.

12.3 Solution by Separating Variables. Use of Fourier Series
• For positive k = µ2,⇒ s2 − µ2 = 0 ⇒ s = ±µTherefore, the general solution,
F(x) = Aeµx + Be−µx
⇒
{F(0) = A+ B = 0
F(L) = AeµL + Be−µL = 0
⇒ A = B = 0
⇒ F = 0, which is of no interest
17 / 25...
.
...
.
...
.

12.3 Solution by Separating Variables. Use of Fourier Series• For negative v = −p2,
⇒ s2 + p2 = 0 ⇒ s = ±ipTherefore, the general solution,
F(x) = A cos px+ B sin px
⇒
{F(0) = A+ B · 0 = 0
y(L) = A cos pL+ B sin pL = 0
A = 0 ⇒ B sin pL = 0
Thus, pL = nπ so that p = nπL . Setting B = 1, we thus obtain infinitely many solutions
F(x) = Fn(x), where
Fn(x) = sinnπLx n = 1, 2, ...
18 / 25...
.
...
.
...
.

12.3 Solution by Separating Variables. Use of Fourier Series
• Notice now k = −p2 = −(nπL )2. Thus, G̈− c2kG = 0 ⇒ G̈− c2(−p2)G = 0
⇒ G̈+ (cp)2G = 0
Let λn = cp = cnπL , the ODE of G(t) becomes a problem as:
⇒ G̈+ λ2nG = 0
Since s2 + λ2n = 0 ⇒ s = ±λni, a general solution is
Gn(t) = Bn cosλnt+ B∗n sinλnt
Here the solution of (1) combining with (2) can be written as
un(x, t) = Gn(t)Fn(x) = (Bn cosλnt+ B∗n sinλnt) sin
nπLx n = 1, 2, ...
19 / 25...
.
...
.
...
.

12.3 Solution by Separating Variables. Use of Fourier Series
Step 3. Solution of the Entire Problem. Fourier Series:The deflection u(x, t) has a solution in the following form:
u(x, t) =∞∑n=1
(Bn cosλnt+ B∗n sinλnt) sin
nπLx
Since the deflection should satisfy the initial condition u(x, 0) = f(x), where 0 ≤ x ≤ L
u(x, 0) =∞∑n=1
Bn sinnπLx = f(x)
We must choose the Bn’s so that u(x, 0) becomes the Fourier sine series of f(x),
Bn =2
L
∫ L
0f(x) sin
nπxL
dx n = 1, 2, ...
20 / 25...
.
...
.
...
.

12.3 Solution by Separating Variables. Use of Fourier Series
Since the deflection should satisfy the initial condition ut(x, 0) = g(x),
ut(x, 0) =
[ ∞∑n=1
(−Bnλn sinλnt+ B∗nλn cosλnt) sin
nπLx
] ∣∣t=0
(6)
=
∞∑n=1
B∗nλn sin
nπLx = g(x)
We must choose the Bn’s so that u(x, 0) becomes the Fourier sine series of f(x),
B∗nλn =
2
L
∫ L
0g(x) sin
nπxL
dx
Since λn = cnπ/L, we obtain
B∗n =
2
cnπ
∫ L
0g(x) sin
nπxL
dx n = 1, 2, ...
21 / 25...
.
...
.
...
.

12.3 Solution by Separating Variables. Use of Fourier Series
When the initial velocity g(x) is identically zero, B∗n = 0, and the solution reduces to
un(x, t) = Gn(t)Fn(x) = Bn cosλnt sinnπLx λn =
cnπL
It is possible to sum this series, that is, to write the result in a closed or finite form.
coscnπL
t sinnπLx =
1
2
[sin{nπ
L(x− ct)}+ sin{nπ
L(x+ ct)}
]Consequently, we may write the solution in the form
u(x, t) =1
2
∞∑n=1
Bn sin{nπL(x− ct)}+ 1
2
∞∑n=1
Bn sin{nπL(x+ ct)}
These two series are those obtained by substituting x− ct and x+ ct, respectively, for thevariable x in the Fourier sine series for f(x)
u(x, t) =1
2[f∗(x− ct) + f∗(x+ ct)]
22 / 25...
.
...
.
...
.

12.3 Solution by Separating Variables. Use of Fourier Series
Example 8 (Sec. 12.3 Example 1, Vibrating String if the Initial Deflection IsTriangular)Find the solution of the wave equation (1) satisfying (2) and corresponding to the triangularinitial deflection
f̂(x) =
2kLx 0 < x <
L2
2kL(L− x)
L2< x < L
and initial velocity zero.
Since g(x) = 0, we have B∗n = 0. We need to determine Bn so that u(x, 0) becomes the Fourier
sine series of f(x). Thus,
u(x, t) =8kπ2
[sin
π
Lx cos
πcLt− 1
32sin
3π
Lx cos
3πcL
t+ ...
](7)
23 / 25...
.
...
.
...
.

12.3 Solution by Separating Variables. Use of Fourier Series
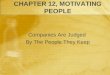
Figure 2: Solution u(x, t) in for various values of t 24 / 25...
.
...
.
...
.

Question & Answer
25 / 25...
.
...
.
...
.