Embed Size (px)
Citation preview

A PROJECT REPORT
ON
“Performance Analysis of Modulation Techniques in
Underwater Channels”
Submitted to
BITS Pilani K.K. Birla Goa Campus
BY
Ishaant Agarwal 2016B5A30103GMayank Kumar 2016B1AA0624GSrijan Nikhar 2016B5AA0474G
Under the Guidance ofProf. Sarang C. Dhongdi
EEE/ECE F366Department of Electrical and Electronics Engineering
BITS Pilani K.K. Birla Goa Campus
2019-2020

Acknowledgements
We are profoundly grateful to Prof. Sarang Dhongdi for his expert guidance and con-
tinuous encouragement throughout to see that this project is true to its target since its com-
mencement to its completion.
We would like to express our deepest appreciation towards Archit Saxena for generously
sharing his project report, that proved to be instrumental for the simulations and was one of
the founding stones for this project.
At last we must express our sincere and heartfelt gratitude to all the staff members and
fellow students of the EEE Department who helped us directly or indirectly during the course
of this project.
Ishaant Agarwal
Mayank Kumar
Srijan Nikhar

ABSTRACT
In recent years there has been an increased interest in underwater acoustic communications
because of its applications in marine research, oceanography, marine commercial operations,
the offshore oil industry and defense. However, the research field is still nascent and many
foundational investigations are yet to be carried out. In this project we conduct a theoretical
analysis of the underwater channel for acoustic communications. We simulate expected results
for the specifications of the hardware in our group and attempt to verify these results using
UnetStack3. This analysis should help to accelerate easy deployment of our setup in the water
test-bed
Keywords: transducer, hydrophone, UnetStack, SNR, modulation, BER

Contents
1 Introduction 2
2 Objectives and Outline 3
3 Theoretical Analysis of UAC 4
3.1 Transmission loss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
3.2 Ocean environment noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
4 Hardware Specifications 7
4.1 Basic Implementation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
4.2 Equipment Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.2.1 Power Amplifier (BII 5011) . . . . . . . . . . . . . . . . . . . . . . . . . 8
4.2.2 Transducer (Transmitter) (BII 7522) . . . . . . . . . . . . . . . . . . . . 8
4.2.3 Hydrophone (Receiver) (BII 7016) and Pre-amplifier (BII 1092) . . . . . 9
5 UnetStack 11
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5.2 Working . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
5.3 UnetStack Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
6 Methods 15
6.1 Theoretical Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
6.2 Autocorrelation function Code . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
7 Results 18
7.1 Theoretical Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
7.1.1 Signal Variation with distance: . . . . . . . . . . . . . . . . . . . . . . . 18
7.2 Modulation Schemes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
7.3 UNET Simulations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
8 Conclusion and Future Scope 22

List of Figures
4.1 End to End block model of underwater acoustic communication . . . . 7
4.2 Extract from specification sheet of our underwater acoustic transponder 9
4.3 Extract from specification sheet of our hydrophone . . . . . . . . . . . . 10
5.1 Code used for simulation of a 2 node network in UnetSim . . . . . . . . 11
5.2 Displayed error messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
7.1 SNR trend with distance in a waterbed environment . . . . . . . . . . . 18
7.2 SNR trend with distance in a sea-like environment . . . . . . . . . . . . 19
7.3 Comparison of different modulation schemes in a Rayleigh channel . . 20

Performance Analysis of Modulation Techniques in Underwater Channels
Chapter 1
Introduction
Acoustic communications are the typical physical layer technology in underwater networks.
Constrained by the physical characteristics of water, communication media other than acoustic
waves suffer from severe propagation loss and refraction distortion. Radio waves propagate at
long distances through conductive sea water only at extra low frequencies (30 - 300 Hz), which
require large antennae and high transmission power. Optical waves do not suffer from such
high attenuation but are affected by scattering. Only sound waves can propagate in water over
large distances.
Practically all kinds of telemetry, communication, location, and remote sensing of wa-
ter masses and the ocean bottom use sound waves.However, high-speed communication in
the underwater acoustic channel has been challenging because of limited bandwidth, extended
multipath, refractive properties of the medium, severe fading, rapid time variation and large
Doppler shifts. Compared to terrestrial communication, underwater communication has low
data rates because it uses acoustic waves instead of electromagnetic waves. These disadvan-
tages make the underwater acoustic channel one of the most difficult channels to use. The
propagation loss depends on the signal frequency and transmission distance. As a result, it is
impossible to simultaneously achieve high data rates and long communication distances.
The past three decades have seen a growing interest in underwater acoustic communica-
tions because of its applications in marine research, oceanography, marine commercial oper-
ations, the offshore oil industry and defense. Continued research over the years has resulted
in improved performance and robustness as compared to the initial communication systems.
Despite the ongoing efforts to improve the performance of underwater acoustic communications
and network protocols, it is still a challenging area.
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 1

Performance Analysis of Modulation Techniques in Underwater Channels
Chapter 2
Objectives and Outline
This project has four main main objectives:
1. Theoretical analysis of the underwater channel and evaluation of various modulation tech-
niques on it.
2. Simulation of results for the ratings of our hardware equipment
3. Verification of the calculations using a simulation environment on UnetStack.
4. Implementation of this work on hardware in the water test-bed.
Due to the COVID-19 lockdown a large part of the project was disrupted and we were
unable to go ahead with the main hardware implementation and testing part of the project.
However, we refined and completed the theoretical part instead.
We started off with a thorough investigation and study of the underwater acoustic channel
and communication schemes. After getting a fair idea of basic foundational concepts we moved
on to exploring UNETsim and UNETAudio, hoping to use the interface as a starting point
for our hardware tests. Just before we would start work on the hardware, the lockdown was
declared and our plans got disrupted. At this point, we decided to focus on the simulation and
theoretical aspects of the project. So, we started with writing out the loss and noise expressions
for underwater signals, performed calculations to understand what results we could expect with
our hardware and if it would match our needs. We use this to deice on a range of best operating
parameters for our successors. Then, we verify these ratings using UNETsim. After verification,
we investigate the applicability and utility of different modulation schemes for our signal.
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 2

Performance Analysis of Modulation Techniques in Underwater Channels
Chapter 3
Theoretical Analysis of UAC
Underwater acoustic communications are mainly influenced by path loss, noise, multi-path,
Doppler spread, and high and variable propagation delay. All these factors determine the
temporal and spatial variability of the acoustic channel, and make the available bandwidth of
the Underwater Acoustic Channel (UAC) limited and dramatically dependent on both range
and frequency. Long-range systems that operate over several tens of kilometers may have
a bandwidth of only a few kHz, while a short-range system operating over several tens of
meters may have more than a hundred kHz bandwidth. In both cases these factors lead to low
bitrates. Underwater acoustic communication links can be classified according to their range
as very long, long, medium, short, and very short links. Usually in oceanic literature, shallow
water refers to water with depth lower than 100m, while deep water is used for deeper oceans.
Category Range (kms) Bandwidth(kHz)Very Short <0.1 >100
Short 0.1-1 20-50Medium 1-10 ≈ 10
Long 10-100 2-5Very Long >100 <1
Table 3.1: Typical bandwidths and ranges for UAC
We analyzed the factors that influence acoustic communications:
3.1 Transmission loss
Transmission loss is caused mainly by attenuation and geometric spreading during the propaga-
tion of acoustic signals in water. Attenuation is generally caused by absorption when acoustic
energy is transferred into heat. A distinguishing property of acoustic channels is that the ab-
sorptive loss for acoustic waves will increase with both propagation distance and frequency.
In underwater acoustic communication, whose carrier frequencies are less than 50 kHz, the
absorption coefficient α can be expressed using Thorp’s empirical formula (Thorp, 1967) with
respect to frequency f in kHz as
α(f) =0.11f 2
1 + f 2+
44f 2
4100 + f 2+
2.75
104f 2 +
3
103(3.1)
It gives α in dB/km. It is obvious that the absorption coefficient increases rapidly with
the frequency. Hence, the available frequency for transmission is limited for underwater acous-
tic communication.
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 3

Performance Analysis of Modulation Techniques in Underwater Channels
Geometric spreading loss is caused by the spreading of acoustic energy into a larger area
as a consequence of acoustic wave expansion. Generally, there are two types of geometric
spreading loss: spherical and cylindrical. Spherical spreading occurs when the source is omni-
directional and acoustic waves spread spherically, and it is usually applied for deep-sea acoustic
communication. Cylindrical spreading occurs when acoustic waves spread horizontally and it
is applicable for shallow water acoustic communications. In practical underwater channels, ge-
ometric spreading is a hybrid of spherical and cylindrical spreading. The geometric spreading
is dependent on only propagation distance and it is frequency-independent.
Most papers then give an equation for Transmission Loss as follows:
10 log TL(d, f) = k · 10 log d+ d · α(f) (3.2)
However, in this equation the first d (in the geometric loss term) is in units of metres while
the d in the attenuation term is in units of kms. Therefore strictly speaking, the following
equation should be followed:
10 log TL(d, f) = k · 10 log d+ d · α(f)× 10−3 (3.3)
where d is distance in metres.
3.2 Ocean environment noise
Acoustic noise in the underwater communication channel can be either ambient noise or man-
made noise. Man-made noise is caused mainly by machinery. Even in the quiet deep sea,
ambient noise still exists. There are four main sources for ambient noise in the ocean: turbu-
lence, shipping, waves, and thermal noise. Because of the multiple sources, the ambient noise
can be approximated as a non-white Gaussian variable. The level of underwater ambient noise
may also vary based on time and location. The power spectral density of these four noise
components is given by an empirical formula (Stojanovic, 2006b) in dB re µPa/Hz (the sound
pressure at reference sound power per Hz) as a function of frequency in kHz as
10 logNt(f) =17− 30 log f
10 logNs(f) =40 + 20(s− 5) + 26 log f − 60 log(f + 0.03)
10 logNw(f) =50 + 7.5√w + 20 log f − 40 log(f + 0.4)
10 logNth(f) =− 15 + 20 log f
(3.4)
Turbulence noise influences only the very low frequency region, f < 10 Hz. Noise caused
by distant shipping is dominant in the frequency region 10 Hz -100 Hz, and it is modeled
using the shipping activity factor s, ranging from 0 to 1 for low and high activity, respectively.
Surface motion, caused by wind-driven waves (w is the wind speed in m/s) is the major factor
contributing to the noise in the frequency region 100 Hz - 100 kHz (which is the operating
region used by the majority of acoustic systems). Finally, thermal noise becomes dominant for
f > 100 kHz. The power spectral density of ambient noise relative to f is given by:
N(f) = Nt(f) +Ns(f) +Nw(f) +Nth(f) (3.5)
Remember that this equation is in the linear domain, while the above p,s,d expressions
are in the log domain. We will need to do the necessary conversions before adding them.
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 4

Performance Analysis of Modulation Techniques in Underwater Channels
Using the tranmission loss TL(d, f) and the noise p.s.d. N(f) one can evaluate the
signal-to-noise ratio (SNR) observed over a distance d when the transmitted signal is a tone of
frequency f and power P . The narrow-band SNR is given by:
SNR(d, f) =P/TL(d, f)
N(f)∆f(3.6)
where P and f are the power and frequency of the transmitted signal, respectively, and
∆f is the receiver noise bandwidth in Hz
In decibels this corresponds to
SNR(dB) = P − (TL+N + 10 log(∆f)) (3.7)
where all quantities except for ∆f are in dB.
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 5

Performance Analysis of Modulation Techniques in Underwater Channels
Chapter 4
Hardware Specifications
4.1 Basic Implementation
Our setup for underwater acoustic communication can be represented as follows:
I. Message Generator
II. Preamplifier
III. Transducer
IV. Hydrophone
V. Power Amplifier
Figure 4.1: End to End block model of underwater acoustic communication
The communication process can be thought of as comprising the following steps:
i. A message is generated/inputted and modulated in some scheme to form an analog signal.
ii. The signal is sent to the preamplifier for amplification.
iii. The amplified signal is converted by the transducer and transmitted across the medium(in
our case, water) as an acoustic wave.
iv. At the receiver side, the hydrophone picks up the acoustic signal, and converts t into an
electrical signal which is sent to the amplifier.
v. The output of the amplifier is the received signal which can then be demodulated and
decoded for the final message.
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 6

Performance Analysis of Modulation Techniques in Underwater Channels
4.2 Equipment Overview
4.2.1 Power Amplifier (BII 5011)
A power amplifier is an electronic amplifier designed to increase the magnitude of power of a
given input signal. The power of the input signal is increased to a level high enough to drive
loads like RF Transmitters, Headphones or in our case, Transducers. The given input signal will
be fed from some DSP or laptop. The specification sheets given by manufactures dictate usage
characteristics and parameters of the device. The model being used is the Benthowave model
BII-5011. It is a 7-watt, linear wideband amplifier, which offers low distortion and low power
consumption to battery-powered underwater acoustic system. Other important characteristics:
• Source Level Capability: 177 + DI (dB re µPa)
• Input Impedance: 10kΩ
• Gain: 26 dB
4.2.2 Transducer (Transmitter) (BII 7522)
A transducer converts some sort of energy to sound (source) or converts sound energy (receiver)
to an electrical signal.Because the field of transducers is large by itself, we concentrate in this
section on some very practical issues that are immediately necessary to either convert receive
voltage levels to pressure levels or transmitter excitation to pressure levels. Practical issues
about transducers (and hydrophones) deal with the understanding of specification sheets given
by the manufacturer. Among those, we will describe on a practical example the definition and
use of the following quantities:
• Transmitting voltage response
• Transmitting beam patterns at specific frequencies.
• Resonant frequency, maximum voltage and maximum source level
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 7

Performance Analysis of Modulation Techniques in Underwater Channels
(a)
(b)
Figure 4.2: Extract from specification sheet of our underwater acoustic transponder
Figure 4.2 (b) corresponds to the transmitting sensitivity versus frequency. The units
are in dB re µPa/V @ 1m, which means that, at the resonant frequency 27.8 kHz for example,
the transducer excited with a 1V amplitude transmits at one meter a pressure Pt such that
20 log10
(Pt
1× 10−6
)= 151 dB i.e. Pt ≈ 35.48 Pa
4.2.3 Hydrophone (Receiver) (BII 7016) and Pre-amplifier (BII 1092)
Hydrophones are usually described with similar characteristics as transducers but they are
designed to work in reception. To this goal, hydrophones are usually connected to a pre-
amplifier with high input impedance to avoid any loss in the signal reception. Hydrophones
usually work on large frequency bandwidth since they don’t need to be adjusted to a resonant
frequency. Like transducers, specification sheets have important quantities that dictate their
usage:
• Free-field Voltage Response (FFVS)
• Transmitting beam patterns at specific frequencies.
• Pre-amplifier gain, maximum voltage and frequency range
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 8

Performance Analysis of Modulation Techniques in Underwater Channels
(a)
(b)
Figure 4.3: Extract from specification sheet of our hydrophone
Fig. 4.3 (b) shows the receiving sensitivity versus frequency. The units are now in dB
re 1V/µPa which means that, at 28 kHz for example, with no preamp gain, the hydrophone
converts a 1µPa amplitude field into a voltage Vr such that 20 log10
(Vr1
)= −202 dB i.e. Vr
≈ 7.9× 10−11V.
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 9

Performance Analysis of Modulation Techniques in Underwater Channels
Chapter 5
UnetStack
5.1 Introduction
UnetStack is an agent-based network stack used in the UNET project(The Underwater Net-
works Project). Developed by the ARL in NUS, it is used to develop and test underwater
networks. There is also an inbuilt simulator which can be used to mimic the behaviour of
nodes and the underwater channel. These networks can also be deployed on UNET-compatible
modems allowing for real-world analysis of networks. There is also UNETAudio, which uses
the laptop soundcard as a modem, to generate soundwaves.
5.2 Working
Figure 5.1: Code used for simulation of a 2 node network in UnetSim
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 10

Performance Analysis of Modulation Techniques in Underwater Channels
We started using the UNETStack software, by running the basic 2-node-network. In this
simulation there are two nodes about a kilometre apart. Each node is loaded with default
protocols for routing, mac, transport, etc. We were able to move the nodes location, and test
out different power levels of transmission along with their effects on communication.
We then tried out the UNETAudio package, which uses the laptops soundcard to send
and receive soundwaves. Using this we were actually able to use our laptops as nodes, moving
it around and sending signals from one to another. Any signal would be generated as a
high frequency wave which could be heard by us. We could also change the power level of
transmission to see its effects. There is an inbuilt method in UNETAudio to send a standard
signal and check the BER in the received signal. We used this to try different distances, power
levels and frequencies to check it’s BER.
5.3 UnetStack Model
The next step was to use the UNETSim to simulate the model and check our calculations. The
aim was to capture the underwater channel model and match it’s BER with our calculated
values. We used the values from the hardware datasheet to model our nodes. The underwater
channel model has already been explored in previous chapters. To do this we modified the
2-node-network model. An inbuilt class, BasicAcousticModel, was available which could be
used to model the Urick model. The parameters used are shown in the code. We tried different
power levels and distances in this network. Commands executed in the shell of 2 node network-
i. node: This command allowed us to see the node characteristics such as mobility, location.
ii. node.location: This is used to get/set the current location of the node. It is what we
used to vary distance between nodes.
iii. phy: This command shows us the characteristics of the modem we are simulating.
iv. phy.refPowerLevel: This is the reference value of transmission power settings. The final
transmitting power is calculating using plvl referred to this value.
v. phy.maxPowerLevel: The maximum allowable power level which can be set for plvl.
vi. phy.minPowerLevel: The maximum allowable power level which can be set for plvl.
vii. plvl: This allowed us to change transmission power level. This value is in reference to the
refPowerLevel parameter.
viii. phy.carrierFrequency: This allows to change the carrier Frequency.
ix. phy.rxSensitivty: The name is misleading as this is NOT the receiver threshold value
to check for incoming transmissions. Changing this value did not seem to affect reception
in any way we could see.
x. ping(dest, no): This command sent a ping to the destination node given by dest. The
node was pinged no number of times and the packet loss was calculated on the sender
node. A packet is defined as a loss when either there is a timeout or there is a bit error
in the frame sent/received.
We can only check BER only in UNETAudio mode. The commands to be typed are:
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 11

Performance Analysis of Modulation Techniques in Underwater Channels
1 >phy [DATA] . th r e sho ld = 0
2 >phy [CONTROL] . t e s t = true
3 >phy [CONTROL] . f e c = 0
4 > 10 . t imes phy << new TxFrameReq ( ) ; de lay (2000) ; // This i s groovy syntax
5 //This command sends out 10 t r an sm i s s i on s with 2 seconds de lay
The output of this would be
1 phy >> TxFrameNtf :INFORM[ type :CONTROL txTime :204359766 ]
2 phy >> RxFrameNtf :INFORM[ type :CONTROL rxTime :204385187 r s s i :−28.9 c f o : 0 . 0 ber :0/144 (18 bytes ) ]
3 phy >> TxFrameNtf :INFORM[ type :CONTROL txTime :205578432 ]
4 phy >> RxFrameNtf :INFORM[ type :CONTROL rxTime :205603853 r s s i :−28.4 c f o : 0 . 0 ber :0/144 (18 bytes ) ]
5 phy >> TxFrameNtf :INFORM[ type :CONTROL txTime :207567766 ]
6 phy >> RxFrameNtf :INFORM[ type :CONTROL rxTime :207589186 r s s i :−28.5 c f o : 0 . 0 ber :0/144 (18 bytes ) ]
7 phy >> TxFrameNtf :INFORM[ type :CONTROL txTime :209583766 ]
8 phy >> RxFrameNtf :INFORM[ type :CONTROL rxTime :209609187 r s s i :−28.2 c f o : 0 . 0 ber :0/144 (18 bytes ) ]
9 phy >> TxFrameNtf :INFORM[ type :CONTROL txTime :211573099 ]
10 phy >> RxFrameNtf :INFORM[ type :CONTROL rxTime :211594519 r s s i :−28.3 c f o : 0 . 0 ber :0/144 (18 bytes ) ]
11 phy >> TxFrameNtf :INFORM[ type :CONTROL txTime :213589099 ]
12 phy >> RxFrameNtf :INFORM[ type :CONTROL rxTime :213614520 r s s i :−28.1 c f o : 0 . 0 ber :0/144 (18 bytes ) ]
13 phy >> TxFrameNtf :INFORM[ type :CONTROL txTime :215578432 ]
14 phy >> RxFrameNtf :INFORM[ type :CONTROL rxTime :215599853 r s s i :−28.5 c f o : 0 . 0 ber :0/144 (18 bytes ) ]
15 phy >> TxFrameNtf :INFORM[ type :CONTROL txTime :217594432 ]
16 phy >> RxFrameNtf :INFORM[ type :CONTROL rxTime :217619853 r s s i :−28.2 c f o : 0 . 0 ber :0/144 (18 bytes ) ]
17 phy >> TxFrameNtf :INFORM[ type :CONTROL txTime :219583766 ]
18 phy >> RxFrameNtf :INFORM[ type :CONTROL rxTime :219605186 r s s i :−28.0 c f o : 0 . 0 ber :0/144 (18 bytes ) ]
19 phy >> TxFrameNtf :INFORM[ type :CONTROL txTime :221599766 ]
20 phy >> RxFrameNtf :INFORM[ type :CONTROL rxTime :221625187 r s s i :−27.7 c f o : 0 . 0 ber :0/144 (18 bytes ) ]
Unfortunately we could not find BER as easily as we did while using UNETAudio, we
used the ping command to check packet loss between the two nodes. The next problem we
had was to actually set the Receiver Threshold. This was not available directly as a setting we
could control and we would have to manually code it up.
1 // s e t t i n g up channel p r op e r t i e s
2 channel . model = org . a r l . unet . sim . channe l s . Bas icAcoust icChannel
3
4 channel . ca r r i e rFrequency = 28 . kHz // f
5 channel . bandwidth = 4096 .Hz //B
6 channel . spread ing = 2 //α
7 channel . temperature = 25 .C //T
8 channel . s a l i n i t y = 35 . ppt //S
9 channel . no i s eLeve l = 0 .dB //N0
10 channel . waterDepth = 20 .m //d
11
12 channel . r i c ianK = 10
13 channel . f a s tFad ing = true
14 channel . pfa = 1e−615 channel . process ingGain = 0 .dB
16
17 modem. dataRate = [2400 , 2 4 0 0 ] . bps // a rb i t r a r y data ra t e
18 modem. frameLength = [2400/8 , 2400/8 ] . bytes // 1 second worth o f data per frame
19 modem. headerLength = 0 // no overhead from header
20 modem. preambleDuration = 0 // no overhead from preamble
21 modem. txDelay = 0 // don ’ t s imulate hardware de lays
Failing this we tried to make our own script which we could use to actually calculate BER
using the channel and communication model with the parameters set according to our hardware.
This required going into the documentation of the API and finding out how everything was
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 12

Performance Analysis of Modulation Techniques in Underwater Channels
implemented. Unfortunately our script failed and we could not debug it as no error messages
were being shown explicitly.
Figure 5.2: Displayed error messages
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 13

Performance Analysis of Modulation Techniques in Underwater Channels
Chapter 6
Methods
6.1 Theoretical Analysis
I coded up a simulation to find out SNR for a signal in waterbed as well as ocearnic environment.
I assumed that the noise in a waterbed will be caused mostly due to thermal processes since
the other factors do not come into factor as much.
6.2 Autocorrelation function Code
channel model.m
1 %% Parameters
2 f=28E3 ; % Transmiss ion f requency
3 L=100∗1E−3; %Length o f path in km
4 % PtW=150 %Transmiss ion power
5 Pt=150 %10∗ l og10 (PtW) ;
6
7 envr=1; %Put envr =1 f o r indoor tank and envr =2 f o r sea s imu la t i on
8 bw=1; %KHz
9 Gt=26; %Transmiss ion Ampl i f i e r Gain
10 f k=f /1000 %in KHz
11 A0=1; %Sca l i ng Constant
12 k=1.5; %spread ing f a c t o r ; k = 2 f o r s p h e r i c a l spreading , k = 1 f o r c y l i n d r i c a l spreading , and k
= 1 .5 f o r so−c a l l e d p r a c t i c a l spread ing
13 %% Path Loss
14
15 a=0.11∗( f k ˆ2) /(1+( f k ˆ2) )+44∗( f k ˆ2) /(4100+( f k ˆ2) ) +2.75E−4∗ f k ˆ2+0.003; %Absorption
c o e f f i c i e n t in db/km
16
17 % Path Loss in dB
18 A =10∗ l og10 (A0)+k∗10∗ l og10 (L∗1E3)+L∗( a ) ;19 %% Noise
20
21 s=0; %Shipping a c t i c v i t y c o e f f i c i e n t 0−min , 1−max
22 w=0; %Speed o f wind in m/ s
23
24 % Noise in dB
25 Nt=17−30∗ l og10 ( f k ) ; %Turbulence
26 Ns=40+20∗(s−0.5)+26∗ l og10 ( f k )−60∗ l og10 ( f k +0.03) ; %Shipping
27 Nw=50+7.5∗ s q r t (w)+20∗ l og10 ( f k )−40∗ l og10 ( f k +0.4) ; %Sur face motion due to wind dr iven waves
28 Nth=−15+20∗ l og10 ( f k ) ; %Thermal Noise
29 bw dB=10∗ l og10 (bw) ;
30
31 i f ( envr==2)
32 %33 % switch true
34 % case f<10
35 % N=Nt
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 14

Performance Analysis of Modulation Techniques in Underwater Channels
36 % case f<100
37 % N=Ns
38 % case f<100E3
39 % N=Nw
40 % case f>100E3
41 % N=Nth
42 % end
43 %44 N=10∗ l og10 (10ˆ(Nt/10)+10ˆ(Ns/10)+10ˆ(Nw/10)+10ˆ(Nth/10) )+bw dB
45 e l s e
46
47 N=−15+20∗ l og10 ( f k )+bw dB %Only thermal no i s e in indoor tanks
48
49 end
50
51
52 % N=30;
53 %%
54
55 SNR=Pt+Gt−A−N
code/channel model.m
The commented part in the noise section actually replaces the summation of noise with
only the dominant contributing factor. Putting envr=2 gives an oceanic channel noise model
and envr=1 gives a water bed simulation. I also put a non-negative constraint on Path Loss
because the expression would result in amplification instead of attenuation over short distances
and that is not physically possible.
This function will give the resultant SNR according to the situation parameters as output.
All other quantities will also be available in the workspace.
To automate the generation of SNR value for multiple starting parameters (like distance)
this script can easily be changed to a function format and run. An example of this applied to
distance follows:
main.m and sim au snr.m
1 c l e a r a l l
2 f o r i =1:61
3 L( i ) =10ˆ(( i −1)/15) ;4 SNR temp=s im au snr (28E3 ,L( i ) ∗1E−3) ;5 SNR( i )=SNR temp ;
6 i f (SNR temp<0)
7 break
8 end
9 end
10
11 semi logx (L ,SNR, ’−o ’ )
12 t i t l e ( ’SNR vs Distance f o r sea ’ )
13 y l ab e l ( ’SNR in db ’ )
14 x l ab e l ( ’ Distance ( in m) ’ )
15 g r id on
code/main.m
1 f unc t i on SNR=sim au snr ( f , L)
2 %% Parameters
3 % f=28E3 ; % Transmiss ion f requency
4 % L=0.5; %Length o f path in km
5 % PtW=150 %Transmiss ion power
6 Pt=150; %10∗ l og10 (PtW) ;
7 bw=1; %Bandwidth in KHz
8
9 envr=2; %Put envr =1 f o r indoor tank and envr =2 f o r sea s imu la t i on
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 15

Performance Analysis of Modulation Techniques in Underwater Channels
10
11 Gt=26; %Transmiss ion Ampl i f i e r Gain
12 f k=f /1000 %in KHz
13 A0=1; %Sca l i ng Constant
14 k=1.5; %spread ing f a c t o r ; k = 2 f o r s p h e r i c a l spreading , k = 1 f o r c y l i n d r i c a l spreading , and k
= 1 .5 f o r so−c a l l e d p r a c t i c a l spread ing
15 %% Path Loss
16
17 a=0.11∗( f k ˆ2) /(1+( f k ˆ2) )+44∗( f k ˆ2) /(4100+( f k ˆ2) ) +2.75E−4∗ f k ˆ2+0.003; %Absorption
c o e f f i c i e n t in db/km
18
19 % Path Loss in dB
20 A =10∗ l og10 (A0)+k∗10∗ l og10 (L∗1E3)+L∗( a ) ;21 A=A∗(A>0) ;
22
23 %% Noise
24
25 s=0; %Shipping a c t i c v i t y c o e f f i c i e n t 0−min , 1−max
26 w=0; %Speed o f wind in m/ s
27
28 % Noise in dB
29 Nt=17−30∗ l og10 ( f k ) ; %Turbulence
30 Ns=40+20∗(s−0.5)+26∗ l og10 ( f k )−60∗ l og10 ( f k +0.03) ; %Shipping
31 Nw=50+7.5∗ s q r t (w)+20∗ l og10 ( f k )−40∗ l og10 ( f k +0.4) ; %Sur face motion due to wind dr iven waves
32 Nth=−15+20∗ l og10 ( f k ) ; %Thermal Noise
33 bw dB=10∗ l og10 (bw) ;
34
35 i f ( envr==2)
36 %37 % switch true
38 % case f<10
39 % N=Nt
40 % case f<100
41 % N=Ns
42 % case f<100E3
43 % N=Nw
44 % case f>100E3
45 % N=Nth
46 % end
47 %48 N=10∗ l og10 (10ˆ(Nt/10)+10ˆ(Ns/10)+10ˆ(Nw/10)+10ˆ(Nth/10) )+bw dB
49 e l s e
50
51 N=−15+20∗ l og10 ( f k )+bw dB %Only thermal no i s e in indoor tanks
52
53 end
54
55
56 % N=30;
57 %%
58
59 SNR=Pt+Gt−A−N60 end
code/sim au snr.m
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 16

Performance Analysis of Modulation Techniques in Underwater Channels
Chapter 7
Results
7.1 Theoretical Analysis
7.1.1 Signal Variation with distance:
Figure 7.1: SNR trend with distance in a waterbed environment
Distance SNR Received Voltage for different preamp gains0 db 20 db 40dB 60dB
0 m 162 db 0.001 V 0.01 V 1 V 100 V10 m 147 db 3.16E-6 V 3.16E-4 V 3.16E-2 V 3.16 V100 m 131.3 db 8.51E-8 V 8.51 E-6 V 8.51E-4 V 8.51E-2 V1000 m 109.7 db 5.88E-3 V 5.88E-8 V 5.88E-6 V 5.88E-4 V
Table 7.1: Estimated Voltage output of the hydrophone with various preamp settings and source positions in waterbedenvironment
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 17

Performance Analysis of Modulation Techniques in Underwater Channels
Figure 7.2: SNR trend with distance in a sea-like environment
Distance SNR Received Voltage for different preamp gains0 db 20 db 40dB 60dB
0 m 154.4 db 1.73E-5 V 1.73E-3 V 0.173 17.37 V10 m 139.3 db 5.37E-7 V 5.37E-5 V 5.37E-3 V 0.537V100 m 123.6 db 1.44E-8 V 1.44E-6 V 1.44E-4 V 1.44E-2 V1000 m 102 db 1E-10 V 1E-8 V 1E-6 V 1E-4 V
Table 7.2: Estimated Voltage output of the hydrophone with various preamp settings and source positions in sea
The two graphs show how the SNR falls as the source-receiver distance is increased. There
is an almost linear fall in SNR with log(distance) upto 1 km and then the signal quality starts
falling drastically. This is because the absorption loss which is linearly proportional to the
distance starts dominationg the spreading loss, which has only a logarithmic dependence on
distance. The accompanying tables show what receiving voltage we might find for 1V input at
the transducer. Even the SNR is calculated considering 1V input. The hydrophone receiving
response is calculated as
Vout = 10SNR-RS+G
10 × Vin (7.1)
where G refers to the preamp gain in dB and RS is receiver sensitivity in dB re 1V/µPa
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 18

Performance Analysis of Modulation Techniques in Underwater Channels
7.2 Modulation Schemes
Here we talk about different modulation schemes which can be used. One of the basic ones
is PSK(Phase Shift Key), in which different symbols are represented by different phases of
the same carrier wave. For Binary Phase Shift Key(BPSK), the phases are 180 apart. The
maximum rate of modulation of BPSK is 1 bit per symbol. QPSK(Quadrature Phase Shift
Keying) is another form of PSK, where 2 bits are represented by one symbol. Here the phases
are 90 apart.
Another form of modulation is QAM(Quadrature Amplitude Modulation). This can transmit
two signals in parallel, by using ASK on the signals. Each signal would have a carrier wave
with same frequency as the other signal, but a 90 phase shift. The final signal would be the
summation of these two carriers.
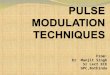
Shown below is a comparison of the different digital modulation schemes as BER vs SNR
graph. From the figure we can see that BPSK hsa the lowest BER values compared to QPSK
and QAM. However, we must remember that BPSK also offers the least data rate at the same
bandwidth compared to QPSK and QAM.
The BER formulae are well known for FSK and QPSK modulation techniques (Rappa-
port,1996), which require the Energy per Bit to Noise psd, Eb
No, that can be found from the
SNR by:
EbNo
= SNR(r)× Bc
Rb
(7.2)
where Rb is the data rate in bps and Bc is the channel bandwidth. Equation 7.3 and 7.4
are the uncoded BER for BPSK/QPSK and FSK respectively:
QPSK : BER =1
2erfc
[EbNo
]1/2(7.3)
FSK : BER =1
2erfc
[1
2
EbNo
]1/2(7.4)
Figure 7.3: Comparison of different modulation schemes in a Rayleigh channel
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 19

Performance Analysis of Modulation Techniques in Underwater Channels
7.3 UNET Simulations
We used UNETStack to first get the minimum power required to successfully transmit and
receive for different distances between two nodes. The channel model used is the Urick model
with a rxSensitivity of -200 dB.
Distance (m) Min Power(dB)
100 m 110 dB
200 m 116 dB
300 m 119 dB
400 m 122 dB
500 m 124 dB
600 m 126 dB
700 m 128 dB
800 m 130 dB
900 m 130 dB
1000 m 130 dB
Also, using this model and a source power level of 177 dB, we found the maximum distance
a packet can travel without errors is 4027m.
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 20

Performance Analysis of Modulation Techniques in Underwater Channels
Chapter 8
Conclusion and Future Scope
In this project, we studies various tools available to simulate underwater communications.
Focussing on UNETstack and custom scripts, we simulated transmission and receival of under-
water acoustic signals. Important quantities such as range and output voltage were calculated
for different scenarios. We hope that the information compiled and provided in this report will
help future researchers in hardware deploement and can serve as a quickstart guide.
Going forward, the calculations has to be confirmed through actual hardware tests. The
actual modems along with a waterbed for testing can be used for this. This is only for sending
and receiving a standard signal across the waterbed. One could further this by actually sending
meaningful custom messages across and trying to decode it at the other end. This would require
the use of some sort of processor on both ends, to modulate/demodulate the signal and get the
original message. Different modulation schemes can be explored and a performance analysis
can be carried out to evaluate optimal setups for different applications.
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 21

Performance Analysis of Modulation Techniques in Underwater Channels
References
[1] M. Stojanovic, On the relationship between capacity and distance in an underwater acous-
tic channel, Vol. 11, 2006, pp. 41–47. doi:10.1145/1161039.1161049.
[2] M. A. Chitre, R. Bhatnagar, W.-S. Soh, Unetstack: An agent-based software stack and
simulator for underwater networks, 2014 Oceans - St. John’s (2014) 1–10.
[3] M. Chitre, S. Shahabudeen, M. Stojanovic, Underwater acoustic communications and
networking: Recent advances and future challenges, Marine Technology Society Journal
42 (2008) 103–116. doi:10.4031/002533208786861263.
[4] L. M. Brekhovskikh, Y. P. Lysanov, Fundamentals of ocean acoustics (3rd edition), The
Journal of the Acoustical Society of America 116 (4) (2004) 1863–1863. doi:10.1121/1.
1792644.
[5] J. Huang, H. Wang, C. He, Q. Zhang, L. Jing, Underwater acoustic communication and the
general performance evaluation criteria, Frontiers of Information Technology Electronic
Engineering 19 (2018) 951–971. doi:10.1631/FITEE.1700775.
[6] I. Akyildiz, D. Pompili, T. Melodia, Challenges for efficient communication in underwater
acoustic sensor networks, ACM SIGBED Review 1. doi:10.1145/1121776.1121779.
[7] U. Qureshi, F. Shaikh, Z. Aziz, S. Shah, A. Sheikh, E. Felemban, S. Qaisar, Rf path
and absorption loss estimation for underwater wireless sensor networks in different water
environments, Sensors 16 (6) (2016) 890. doi:10.3390/s16060890.
[8] W. Kuperman, P. Roux, Underwater acoustics, Springer Handbook of Acoustics, ISBN
978-0-387-30446-5. Springer-Verlag New York, 2007, p. 149 -1 (2007) 149. doi:10.1007/
978-0-387-30425-0_5.
[9] G. Burrowes, J. Khan, Short-Range Underwater Acoustic Communication Networks, 2011.
doi:10.5772/24098.
[10] E. M. Sozer, Underwater Acoustics: A Brief Introduction, MIT Sea Grant College
Program.
URL https://dspace.mit.edu/bitstream/handle/1721.1/74140/
2-017j-spring-2006/contents/lecture-notes/05_3uap_notes.pdf
[11] A. Saxena, Analysis of modulation techniques on underwater acoustic modem, BITS Goa
Undergraduate Thesis BITS F421T 2019.
Department of Electrical and Electronics Engineering, BITS Pilani K.K. Birla Goa Campus, Goa 22