Embed Size (px)
Citation preview
PES 1110 Fall 2013, Spendier Lecture 28/Page 1
Today:
- Rotational Kinetic Energy and Rotational Inertia (10.6-10.7)
(Exam 2 will include the material covered in today’s lecture)
- %ext Friday, %ov 8th
: Exam 2
Rotational Kinetic Energy
A spinning wheel has kinetic energy. Any rotating object has a kinetic energy due to its
motion. The equation for kinetic energy is
21
2K mv=
How many different values of linear speed does a rotating wheel have? It has infinitely
many different linear speeds. So does this mean that the wheel has an infinite amount of
kinetic energy? NO! We need to use calculus to compute rotational kinetic energy.
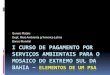
We have to imagine splitting the rotating object up into many small pieces. Each of these
small pieces will go around a circle as the object rotates. We first need to index the
pieces, for example we can look at the i-th piece and follow it around a circle as it rotates.
The kinetic energy of the i-th piece is
21
2i i iK m v=
mi = mass of grey dot
vi = linear speed of grey dot
we can relate linear speed to angular speed
i iv rω=
by using ri, the distance from the axis of rotation to the grey dot. There is no subscript on
ω, since all pieces have the same angular speed. A rotating wheel has only ONE angular
speed!
( )2 2 21 1
2 2i i i i iK m r m rω ω= =
To obtain the total rotational kinetic energy for the entire wheel we need to add up all the
kinetic energies for each piece:
PES 1110 Fall 2013, Spendier Lecture 28/Page 2
2 2 2 21 1
2 2i i i i i
i i i
K K m r m rω ω ≈ = = ∑ ∑ ∑
This is an approximation for the total kinetic energy. It is not precise because the pieces
are too big. (There are white spaces in between.) This expression becomes exact in the
limit as the number of pieces approaches infinity (and so the size of each piece
approaches zero). We need to take some sort of a continuum limit of the inside sum. We
need to take an integral.
Rotational Inertia or Moment of Inertia
The inside sum 2
i i
i
m r∑ , is a sum over all the masses at distances ri from the axis of
rotation. This quantity depends on the shape and density of the object. It is given a special
name “moment of inertia” or “rotational inertia”
2
i i
i
I m r=∑ (this is correct for point particles)
But for continuous objects we need to take the limit and the sum becomes
2 2 2lim
i ii
i
I m r r dm r dVρ→∞
= = =∑ ∫ ∫
ρ = density (mass divided by volume: M/V)
V = volume
The end result is that the kinetic energy of a rotating object is simply
21
2K Iω= (for rotating object)
What is this moment of inertia physically?
The equation for the kinetic energy of a rotating object
21
2K Iω= (for rotating object)
looks just like the equation we had before for kinetic energy
21
2K mv= (for object moving in straight line)
but with different symbols in it.
For rotating objects we replace linear speed v with angular speed ω and we replaced mass
m with the moment of inertia I.
So the physical idea is that the moment of inertia, I, is the rotational counterpart to
mass m. It plays the same role in rotation as mass does in linear motion. We started to
think about mass when we did Newton’s 2nd
law: F = ma. The more mass an object has
PES 1110 Fall 2013, Spendier Lecture 28/Page 3
the more force you need to make it move. Hence, the moment of inertia tells us how
“hard" it is to make an object rotate (spin).
After the exam, we will talk about what plays the role of force in rotation. We will learn
that this is called the torque. The more moment of inertia an object has the more torque
you need to apply to make it spin.
The moment of inertia depends on:
(a) The object’s shape.
(b) The axis of rotation
(c) The total mass of the object and how its mass is distributed.
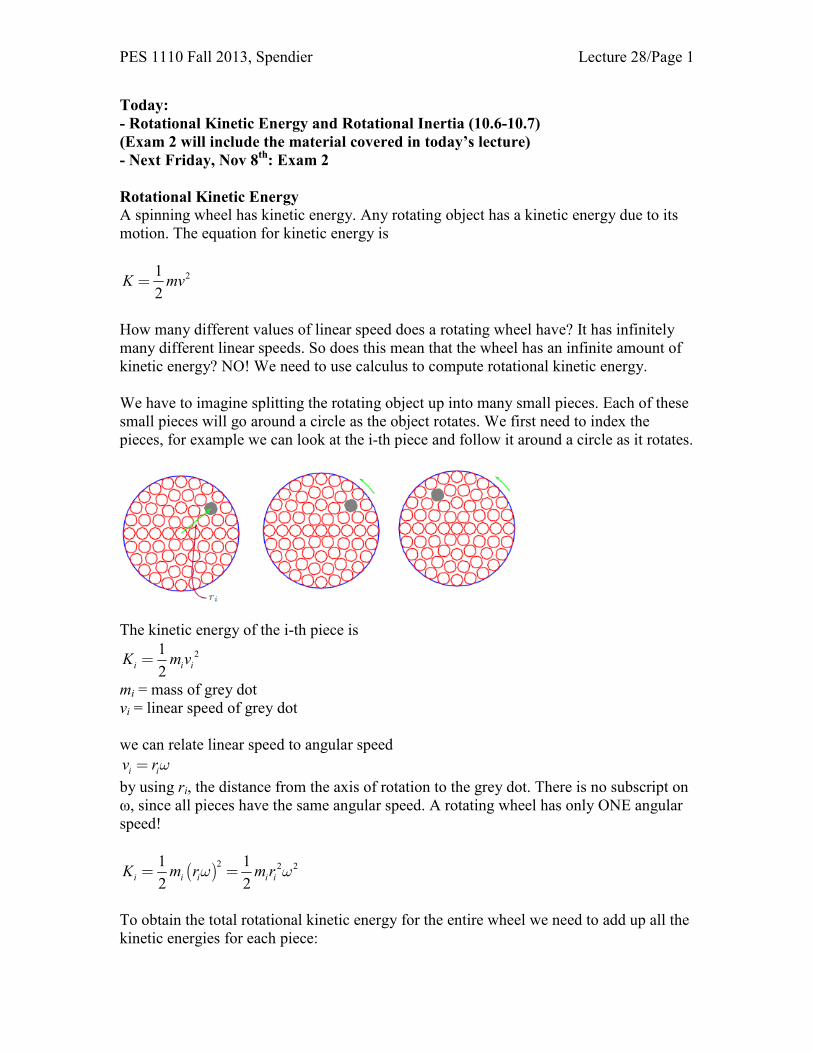
(a) The object’s shape.
For a fixed mass (uniformly distributed) and radius, round objects naturally rotate easier,
so they have a smaller moment of inertia.
In our calculations for I, the location of the mass determines how we split it into pieces:
2lim
i ii
i
I m r→∞
= ∑
We can split a round object into many pieces and a lemon shaped object into many
pieces.
The pieces are at different locations because of the different shape, i.e. different shapes
have different ri’s. The pieces are at different distances from the center of rotation.
Example 1:
A solid circle made out of wood and a hoop made out of metal have the same mass.
Assuming that both have the same radii and that both are rotating about their center,
which object will have a smaller moment of inertia?
Answer: For the hoop the mass is only around the edge. Basically, it has only one value
of ri from the center out. The solid circle has ri’s anywhere from zero all the way out to
the outer edge of the hoop. This means that the solid circle will have smaller moment of
inertia since it has smaller values of ri’s.
(see table on page 5)

PES 1110 Fall 2013, Spendier Lecture 28/Page 4
(b) The axis of rotation. The moment of inertia is different depending how I spin the
object. It depends on how ri is defined. One single object has more than one moment of
inertia. You have to specify around which axis you wan to spin the object.
Rotation of lemon about its the Center: Rotation of lemon about One End:
(smaller ri � smaller I) (bigger ri � larger I)
If we look at the same point, the moment of inertia will be bigger for rotation about One
End.
Example 2:
Two particles, each with mass m, are joined by a massless rod of length L.
a) Calculate the moment of inertia I1 for an axis of rotation located at the center of mass.
b) Calculate the moment of inertia I2 for an axis of rotation about one of the masses.
c) If in both cases the masses rotate at the same angular speed, which system has a larger
rotational kinetic energy?
PES 1110 Fall 2013, Spendier Lecture 28/Page 5
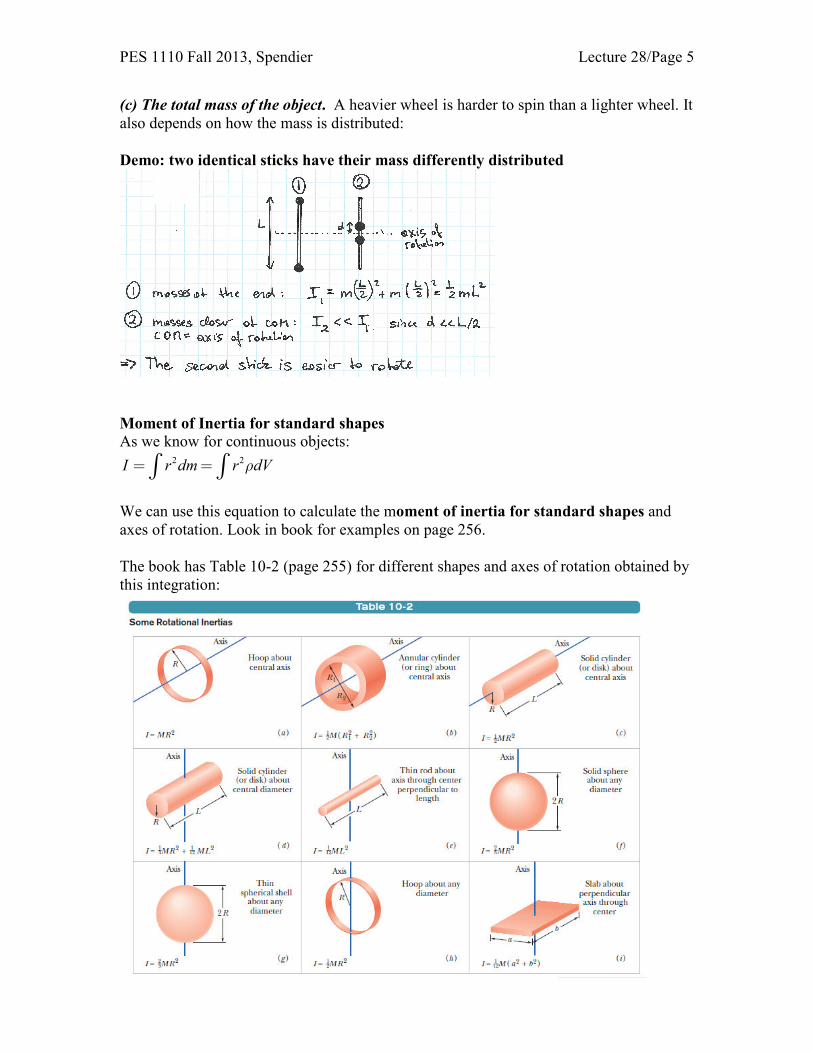
(c) The total mass of the object. A heavier wheel is harder to spin than a lighter wheel. It
also depends on how the mass is distributed:
Demo: two identical sticks have their mass differently distributed
Moment of Inertia for standard shapes
As we know for continuous objects: 2 2
I r dm r dVρ= =∫ ∫
We can use this equation to calculate the moment of inertia for standard shapes and
axes of rotation. Look in book for examples on page 256.
The book has Table 10-2 (page 255) for different shapes and axes of rotation obtained by
this integration:

PES 1110 Fall 2013, Spendier Lecture 28/Page 6
Parallel-axis theorem:
We just learned from in class example 2 that a body doesn't have just one moment of
inertia. In fact, it has infinitely many, because there are infinitely many axes about which
it might rotate. But there is a simple relationship between the moment of inertia Icom of a
body of mass M about an axis through its center of mass and the moment of inertia I
about any other axis parallel to the original one but displaced from it by a distance h. This
relationship is called parallel-axis theorem:
2
comI I Mh= −
h = distance between the 2 axes of rotation.
Example 4:
A part of a mechanical linkage has a mass of 3.6 kg. We measure its moment of inertia
about an axis 0.15 m from its center of mass to be I = 0.132 kg m2. What is the moment
of inertia Icom about a parallel axis through the center of mass?
PES 1110 Fall 2013, Spendier Lecture 28/Page 7
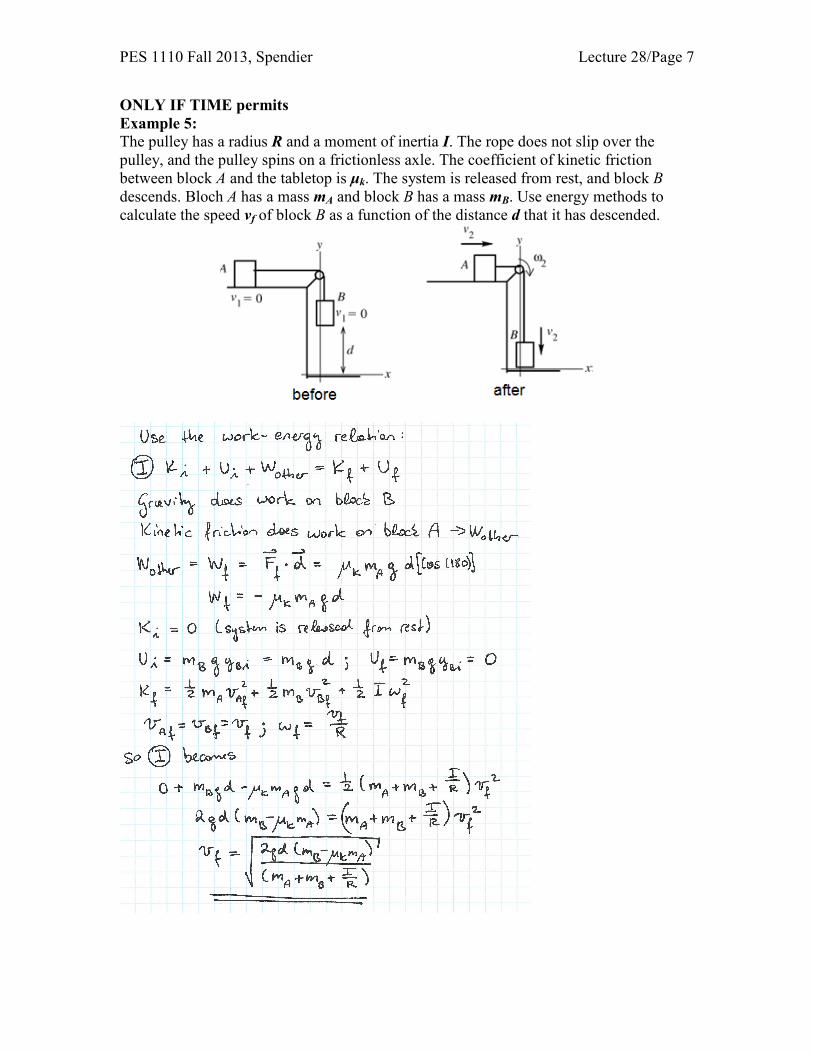
O%LY IF TIME permits
Example 5:
The pulley has a radius R and a moment of inertia I. The rope does not slip over the
pulley, and the pulley spins on a frictionless axle. The coefficient of kinetic friction
between block A and the tabletop is µk. The system is released from rest, and block B
descends. Bloch A has a mass mA and block B has a mass mB. Use energy methods to
calculate the speed vf of block B as a function of the distance d that it has descended.

PES 1110 Fall 2013, Spendier Lecture 28/Page 8
Example 6: (for our calculus II students in class - not on exam)
A uniform rod with mass M and length L rotates about an axis through point O, at an
arbitrary distance h from one end. Compute the moment of inertia
a) for an arbitrary distance h from one end,
b) for h = 0 (axis of rotation is at one end),
c) for h = L (axis of rotation is at the other end), and
d) for h = L/2 (axis of rotation passes through center).