Embed Size (px)
Citation preview

PHEV Control Strategies
2009 DOE Hydrogen Program and Vehicle Technologies2009 DOE Hydrogen Program and Vehicle Technologies Annual Merit Review
May 19, 2009
Dominik Karbowski, Aymeric Rousseau, Phil Sharer
Argonne National LaboratoryArgonne National Laboratory
Sponsored by Lee Slezak
This presentation does not contain any proprietary, confidential, or otherwise restricted information

Project OverviewTimeline
Start – September 2008Barriers
Develop optimum control strategies End – September 2009
50% Completeto maximize fuel displacement
Take into account real world driving
Budget
DOEPartners
U S EPADOE
FY08 $ 400k
FY09 $ 200k
U.S EPA
$
2

Main Objectives
Understand the impact of different control strategy philosophies on fuel efficiency and component operating conditions.y p p g
Analyze the most appropriate set of control parameters to maximize fuel efficiency while maintaining acceptable drive
li ( i ) d i i i b lif ( lquality (e.g., engine starts) and maximizing battery life (e.g., low RMS current).
Evaluate fuel efficiency obtained with different control strategiesEvaluate fuel efficiency obtained with different control strategies over Real World Driving Cycles (RWDC’s) and compare to the J1711 procedure.
3

Milestones
Q1 Q2 Q3
Develop Controls
Q4
Develop Controls
Tune Parameters
Run Simulations on RealRun Simulations on Real World Drive Cycles (RWDC)Select “Best Control” per vehicle
Analyze Impact on Components OperationWrite report
p
Current Status
4

Approach – Vehicle Definition
Real World Drive Cycles
AutomatedSizing
Control Strategy Analysis
10
15
20
25
Spee
d (m
ph)
Drive cycle
10
15
20
25
Spee
d (m
ph)
Drive cycle
Motor Power for Cycle
Vehicle Assumptions
0 200 400 600 800 1000 12000
5
10
Time (s)
S
0 200 400 600 800 1000 12000
5
10
Time (s)
S
0
5
10
15
20
25
30
35
40
Spee
d (m
ph)
Drive cycle
0
5
10
15
20
25
30
35
40
Spee
d (m
ph)
Drive cycle
30
35Drive cycle
30
35Drive cycle
Battery Power
Engine Power0 500 1000 1500 2000 2500 30000
Time (s)0 500 1000 1500 2000 2500 30000
Time (s)
0 500 1000 1500 2000 25000
5
10
15
20
25
Time (s)
Spee
d (m
ph)
0 500 1000 1500 2000 25000
5
10
15
20
25
Time (s)
Spee
d (m
ph)
Battery Energy
ConvergenceNo
>110 TripsOne day in Kansas City
Yes
Midsize Vehicle
5Only Hot Conditions Assumed, no Grade!
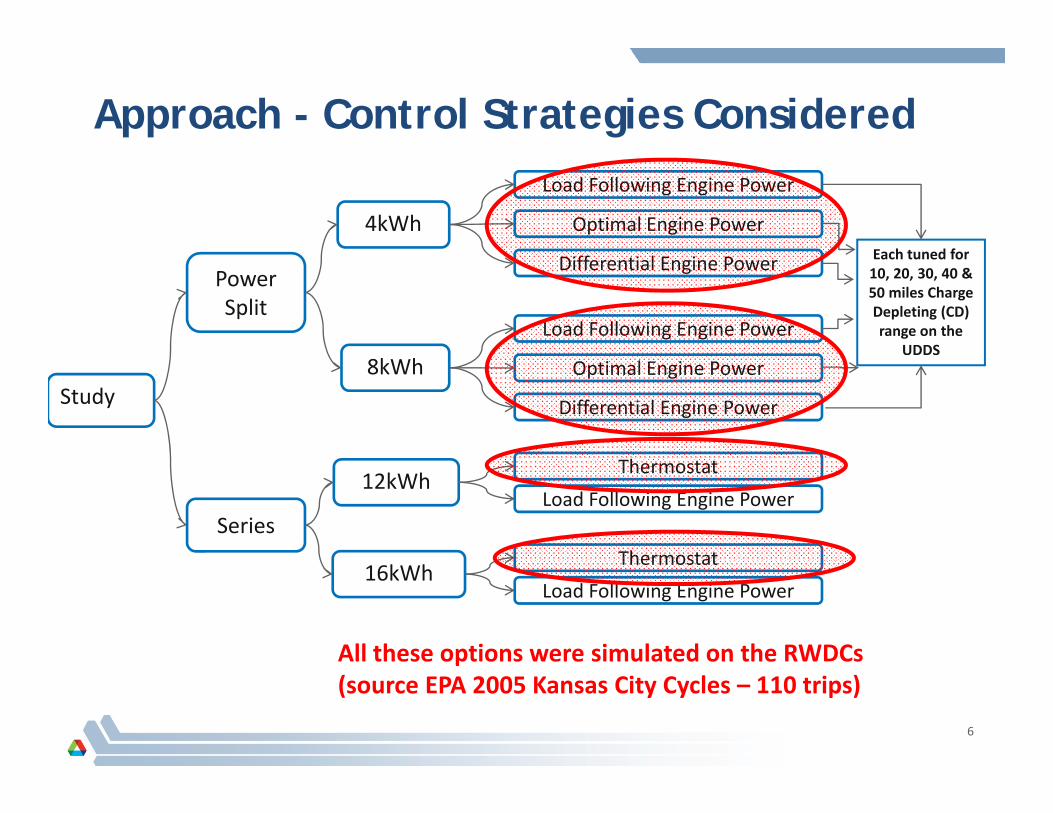
Approach - Control Strategies Considered
4kWh
Load Following Engine Power
Optimal Engine PowerEach tuned for
Power Split
Differential Engine Power
Load Following Engine Power
Each tuned for 10, 20, 30, 40 & 50 miles Charge Depleting (CD) range on the
UDDS
Study8kWh Optimal Engine Power
Differential Engine Power
Series
12kWhLoad Following Engine Power
Thermostat
Thermostat16kWh
Load Following Engine Power
Thermostat
All these options were simulated on the RWDCs
6
p(source EPA 2005 Kansas City Cycles – 110 trips)
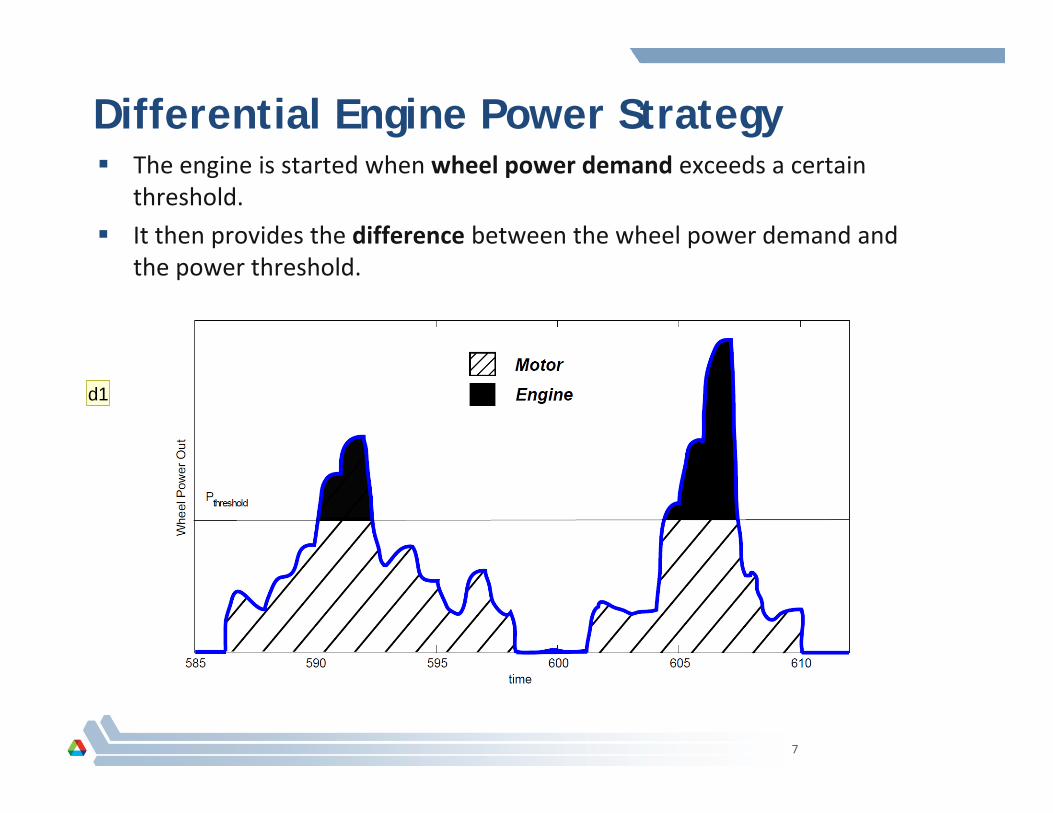
Differential Engine Power Strategy The engine is started when wheel power demand exceeds a certain
threshold.
It then provides the difference between the wheel power demand and the power threshold.
7
d1
Slide 7
d1 Shouldn't the Power threshold be the available max torque of the EM?dkarbowski, 3/19/2009

Load Following Strategy The engine is started when wheel power demand exceeds a certain
threshold.
It then provides the full wheel power, i.e. it is load following
8
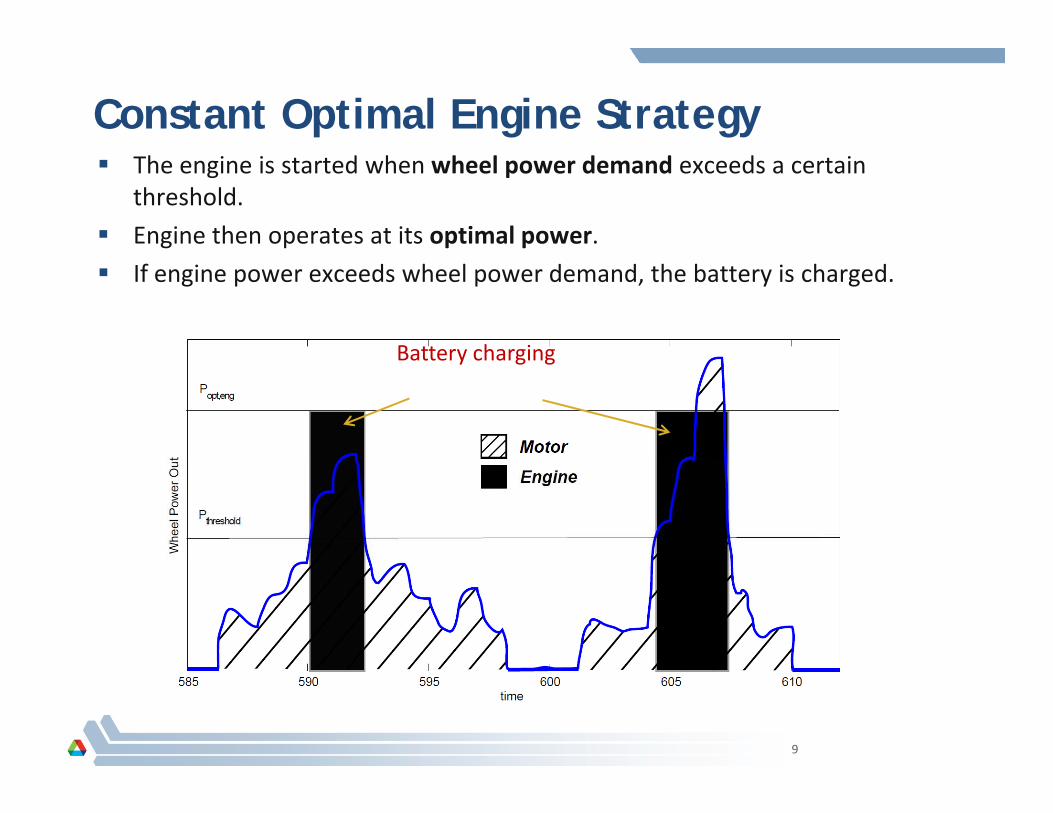
Constant Optimal Engine Strategy The engine is started when wheel power demand exceeds a certain
threshold.
Engine then operates at its optimal power.
If engine power exceeds wheel power demand, the battery is charged.
Battery chargingBattery charging
9
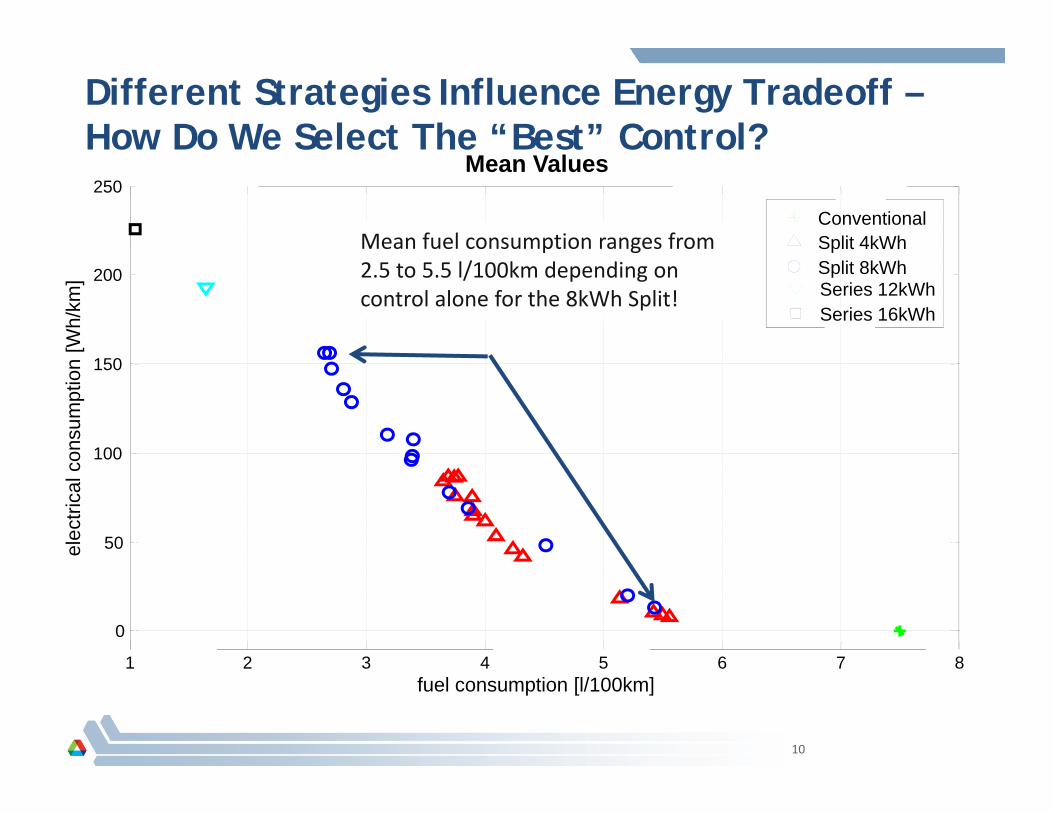
Different Strategies Influence Energy Tradeoff –How Do We Select The “Best” Control?250
Mean Values
Split 4kWhConventional
Mean fuel consumption ranges from 200
[Wh/
km] Series 12kWh
Series 16kWh
Split 8kWhp g
2.5 to 5.5 l/100km depending on control alone for the 8kWh Split!
100
150
onsu
mpt
ion
50
100
elec
trica
l co
1 2 3 4 5 6 7 8
0
10
1 2 3 4 5 6 7 8fuel consumption [l/100km]

Kernel Density Will be Used to Compare Control OptionsControl Options
40
Distribution Fuel ConsumptionConventional Vehicle
30
35
es
histogramkernel density estimation
20
25
of O
ccur
ence
10
15
Num
ber o
6 6.5 7 7.5 8 8.5 9 9.50
5
11
Fuel Consumption [liter/100km]
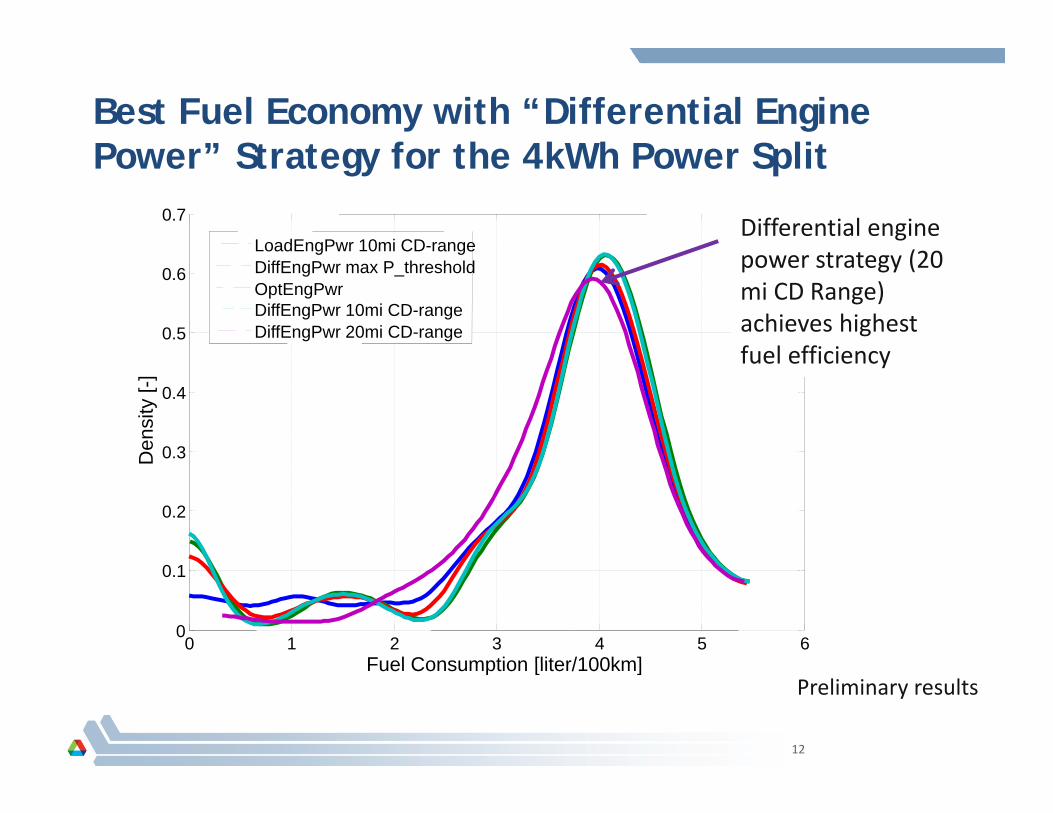
Best Fuel Economy with “Differential Engine Power” Strategy for the 4kWh Power SplitPower” Strategy for the 4kWh Power Split
0.7
LoadEngPwr 10mi CD-rangeDifferential engine
t t (20
0.5
0.6g g
DiffEngPwr max P_thresholdOptEngPwrDiffEngPwr 10mi CD-rangeDiffEngPwr 20mi CD-range
power strategy (20 mi CD Range) achieves highest fuel efficiency
Performs best regarding fuel 0.3
0.4
Den
sity
[-]
fuel efficiency
g geconomy
0.2
0.3D
0 1 2 3 4 5 60
0.1
Fuel Consumption [liter/100km]
12
Fuel Consumption [liter/100km]Preliminary results
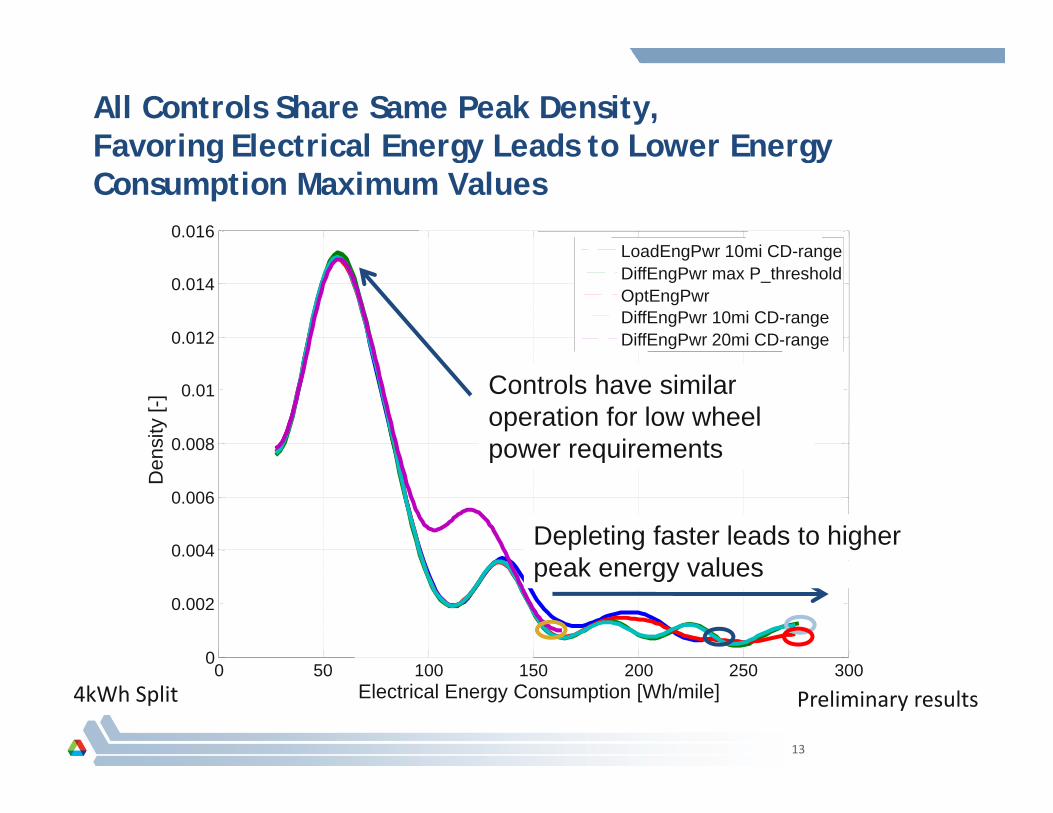
All Controls Share Same Peak Density, Favoring Electrical Energy Leads to Lower Energy
0.016LoadEngPwr 10mi CD-range
Favoring Electrical Energy Leads to Lower Energy Consumption Maximum Values
0.012
0.014
LoadEngPwr 10mi CD-rangeDiffEngPwr max P_thresholdOptEngPwrDiffEngPwr 10mi CD-rangeDiffEngPwr 20mi CD-range
0.008
0.01
nsity
[-] Controls have similar
operation for low wheel power requirements
0.004
0.006
De p q
Depleting faster leads to higher k l
0
0.002
peak energy values
0 50 100 150 200 250 3000
Electrical Energy Consumption [Wh/mile]
13
4kWh Split Preliminary results

Number of Engine Starts Clearly Distinguishes Control Strategies
0.35
0.4LoadEngPwr 10mi CD-rangeDiffEngPwr max P_thresholdOptEngPwrDiffE P 10 i CD
Strategies
0.25
0.3
[-]
DiffEngPwr 10mi CD-rangeDiffEngPwr 20mi CD-range
0.15
0.2
Den
sity
Performs best regarding # of engine starts
0.05
0.1
0 2 4 6 8 10 12 140
Number of starts per distance [#starts/mile]
14
4kWh Split Preliminary results
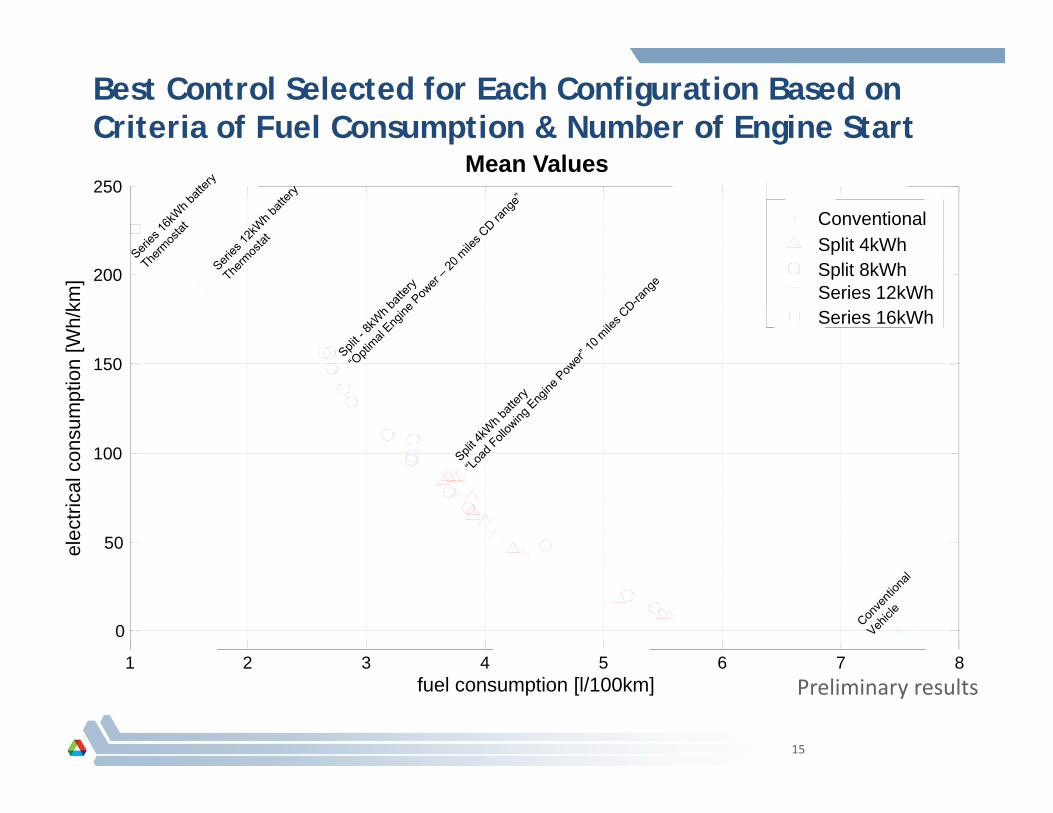
Best Control Selected for Each Configuration Based on Criteria of Fuel Consumption & Number of Engine Start
250Mean Values
Split 4kWhConventional
200
[Wh/
km]
Series 12kWhSeries 16kWh
pSplit 8kWh
100
150
onsu
mpt
ion
50
100
elec
trica
l co
1 2 3 4 5 6 7 8
0
15
1 2 3 4 5 6 7 8fuel consumption [l/100km] Preliminary results
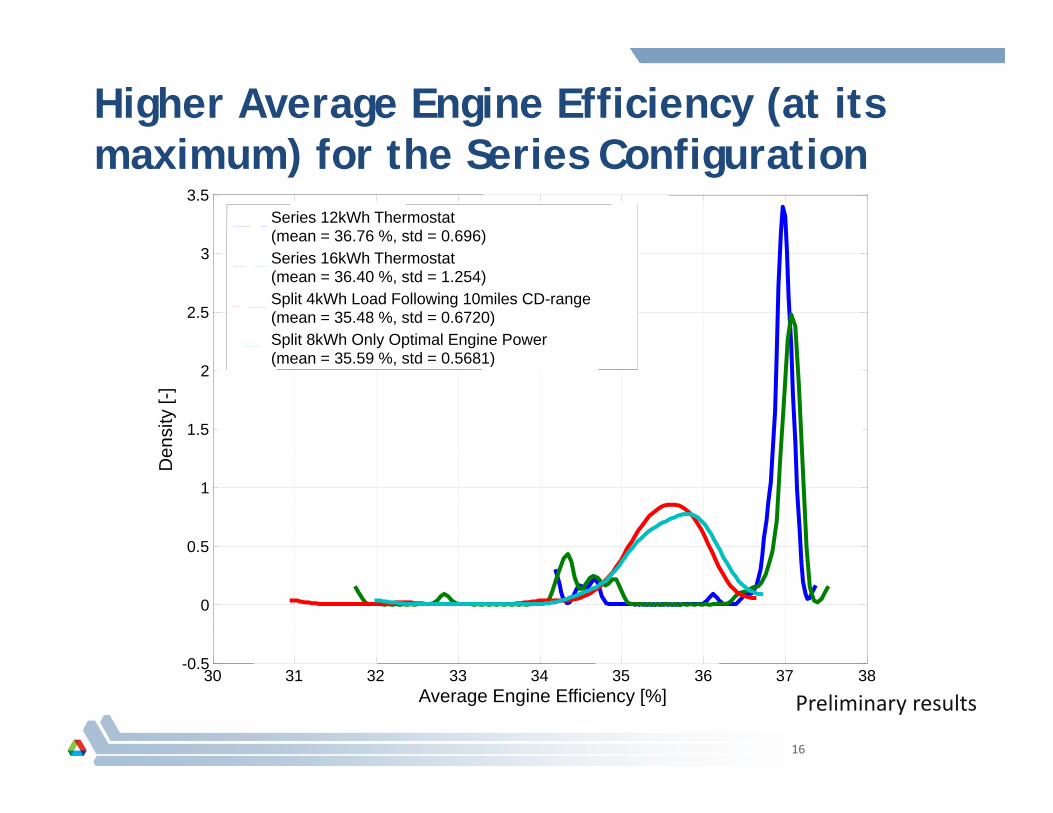
Higher Average Engine Efficiency (at its maximum) for the Series Configurationmaximum) for the Series Configuration
3
3.5Series 12kWh Thermostat(mean = 36.76 %, std = 0.696)S i 16kWh Th t t
2.5
3 Series 16kWh Thermostat(mean = 36.40 %, std = 1.254)Split 4kWh Load Following 10miles CD-range(mean = 35.48 %, std = 0.6720)Split 8kWh Only Optimal Engine Power(mean 35 59 % std 0 5681)
1.5
2
ensi
ty [-
]
(mean = 35.59 %, std = 0.5681)
0.5
1
D
0 5
0
16
30 31 32 33 34 35 36 37 38-0.5
Average Engine Efficiency [%] Preliminary results

Future Activities
Expand study to other Real World Drive Cycles (RWDC) –Source INLSource INL
Develop and test control strategies with trip recognition
Implement controls on hardware (if possible)Implement controls on hardware (if possible)
Understand differences with J1711 fuel efficiency results
17
Summary The analysis is only valid for the specific set of RWDC The analysis is only valid for the specific set of RWDC.
Several control strategies and set of parameters were evaluated on Real World Drive Cycles.y
Different controls were selected based on fuel efficiency and drive quality.
Control selected varies depending on the battery energy.– Load Following for 4kWh battery
– Optimum Engine for 8kWh batteryp g y
– Thermostat for 12 and 16 kWh battery
Impact of component operating conditions assessed
Preliminary comparison with J1711 shows fuel economy under evaluated
18
References D. Karbowski, “Fair Comparison of Powertrain Configurations for Plug‐In
Hybrid Operation using Global Optimization”, SAE 2009‐01‐1334, SAE World Congress, April 2009
Rousseau, A. Pagerit, S., Gao, D. (Tennessee Tech University) , "Plug‐in hybrid electric vehicle control strategy parameter optimization", Journal of Asian Electric Vehicles, Volume 6 Number 2 December 2008, ISSN 1348‐3927
P. Sharer, A. Rousseau, D. Karbowski, S. Pagerit, “Plug‐in Hybrid Electric Vehicle Control Strategy: Comparison between EV and Charge‐Depleting Options”, SAE paper 2008‐01‐0460, SAE World Congress, Detroit (April 2008).
19
Additional Slides
20

Analysis of Vehicle Speed Traces at Different Levels
40Drive cycle
15
20
25
30
35
40
Spee
d (m
ph)
A hill is the portion of a cycle
25Drive cycle
40Drive cycle
35Drive cycle
0 500 1000 1500 2000 2500 30000
5
10
15
Time (s)
between two stops
10
15
20
Spee
d (m
ph)
15
20
25
30
35Sp
eed
(mph
)
15
20
25
30
Spee
d (m
ph)
0 200 400 600 800 1000 12000
5
Time (s)0 500 1000 1500 2000 2500 30000
5
10
Time (s) 0 500 1000 1500 2000 25000
5
10
Time (s)
15
20
25
30
35
40
Speed (mph)
Drive cycle
21
0 1000 2000 3000 4000 5000 6000 70000
5
10
15
Time (s)
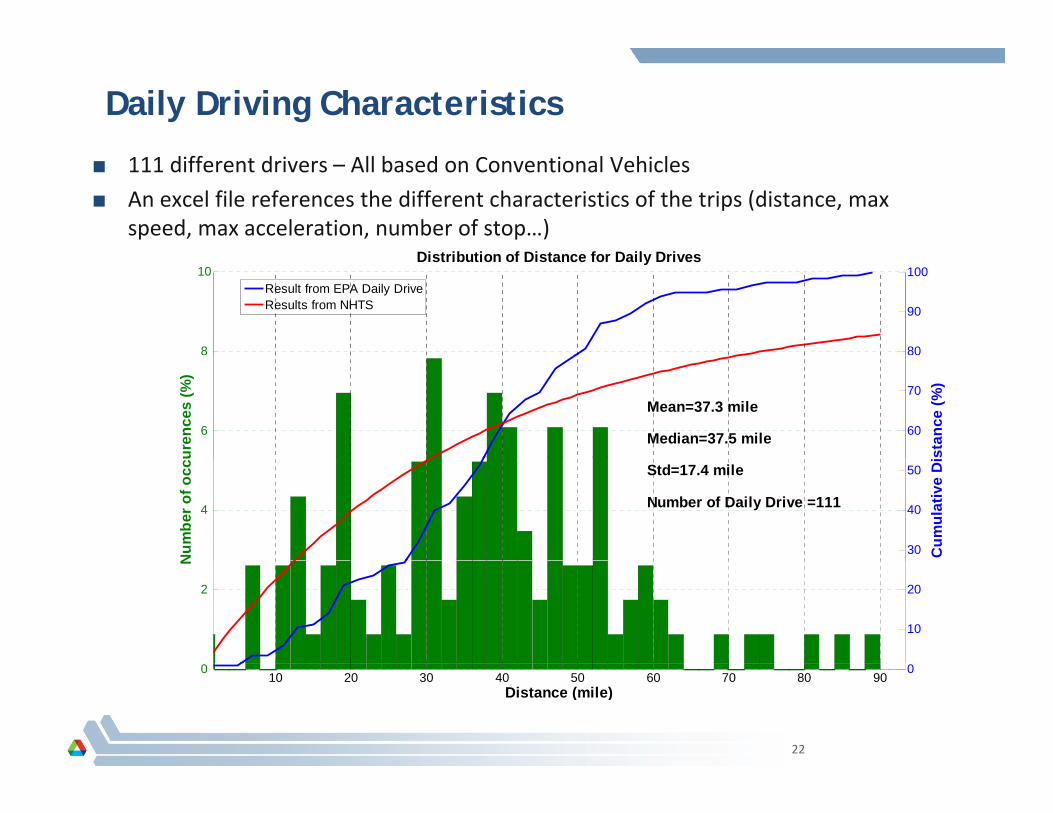
Daily Driving Characteristics
■ 111 different drivers – All based on Conventional Vehicles
■ An excel file references the different characteristics of the trips (distance, max speed, max acceleration, number of stop…)
Di t ib ti f Di t f D il D i
8
10
80
90
100Distribution of Distance for Daily Drives
Result from EPA Daily DriveResults from NHTS
6
uren
ces
(%)
60
70
stan
ce (%
)
Mean=37.3 mile
Median=37.5 mile
4
Num
ber o
f occ
u
30
40
50
Cum
ulat
ive
Di
Std=17.4 mile
Number of Daily Drive =111
2
N
10
20
22
0 10 20 30 40 50 60 70 80 90
0
Distance (mile)

Additional Characteristics of the Daily Driving20 100
Distribution of Max speed for Daily Drives40 100
Distribution of Mean acceleration positive for Daily Drives
12
16
20
ence
s (%
)
60
70
80
90
100
spee
d (%
)
Mean=72.3 mile/hMedian=72 mile/hStd=8.5 mile/h 24
32
40
ence
s (%
)
60
70
80
90
100
atio
n po
sitiv
e (%
)Mean=0.7 m/s2Median=0.7 m/s2Std=0.1 m/s2Number of Daily Drive =111
US06
US06
4
8
Num
ber o
f occ
ur
20
30
40
50
Cum
ulat
ive
Max
sStd 8.5 mile/hNumber of Daily Drive =111
8
16
Num
ber o
f occ
ure
20
30
40
50
ulat
ive
Mea
n ac
cele
ra
HWFET
LA92U
DDS
HWFET
(0.16 m/s2)
UDDS LA92
US06
0 40 50 60 70 80 90 100 110 120
0
10
Max speed (mile/h)0
0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.850
10
Cum
u
Mean acceleration positive (m/s2)
20 100Mean=33 4 mile/h
Distribution of Mean speed for Daily Drives30 100
Distribution of Mean deceleration for Daily Drives
12
16
cure
nces
(%)
60
70
80
90
an s
peed
(%)
Mean=33.4 mile/hMedian=33.5 mile/hStd=6.8 mile/hNumber of Daily Drive =111
18
24
cure
nces
(%)
60
70
80
90
dece
lera
tion
(%)
Mean=-0.8 m/s2
Median=-0.8 m/s2
Std=0.1 m/s2
Number of Daily Drive =111
HWFET
US06
US06
4
8
Num
ber o
f occ
10
20
30
40
50
Cum
ulat
ive
Mea
6
12
Num
ber o
f occ
20
30
40
50
Cum
ulat
ive
Mea
n dLA
92
UDDS HWFET
(0.13 m/s2)
UDDS
(0.48 m/s2)
LA92
23
0 20 25 30 35 40 45 50 55
0
10
Mean speed (mile/h)0 -1 -0.95 -0.9 -0.85 -0.8 -0.75 -0.7 -0.65 -0.6 -0.55 -0.5
0
10
Mean deceleration (m/s2)
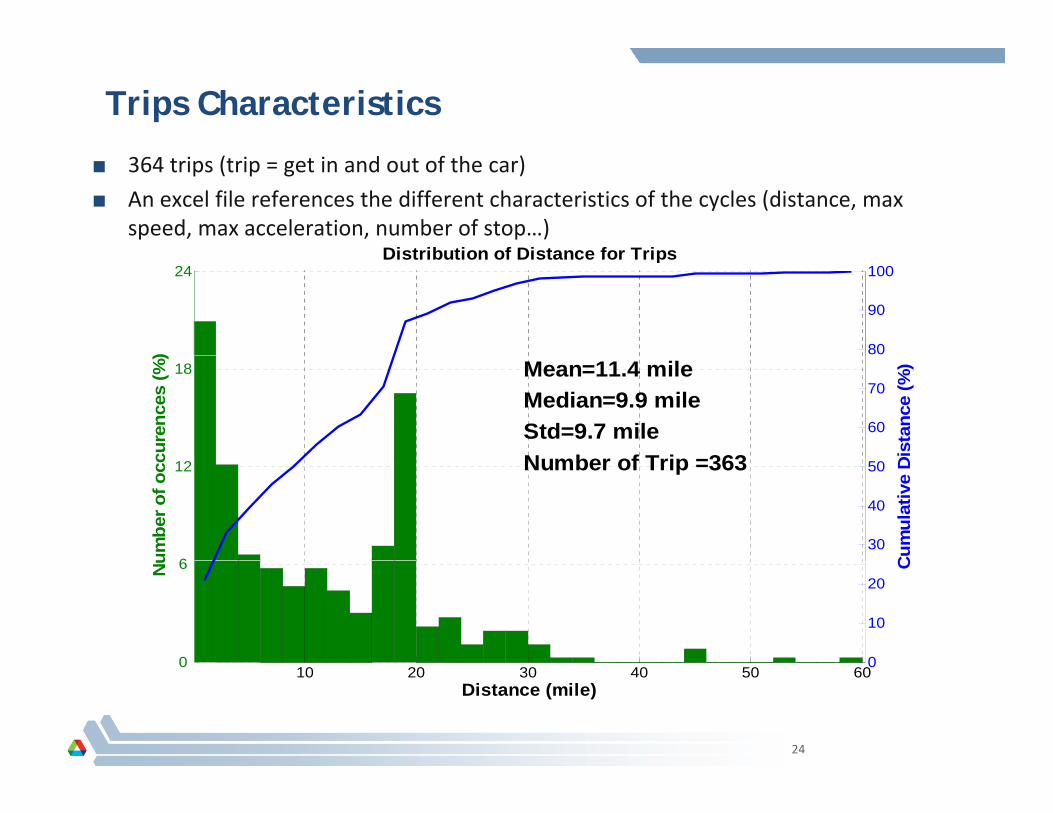
Trips Characteristics
■ 364 trips (trip = get in and out of the car)
■ An excel file references the different characteristics of the cycles (distance, max speed, max acceleration, number of stop…)
Distribution of Distance for Trips24
) 80
90
100Distribution of Distance for Trips
18
cure
nces
(%)
60
70
Dis
tanc
e (%
)Mean=11.4 mileMedian=9.9 mileStd=9.7 mileN b f T i 363
6
12
umbe
r of o
cc
30
40
50
Cum
ulat
ive
DNumber of Trip =363
0
6 Nu
0
10
20
C
24
0 10 20 30 40 50 60
0
Distance (mile)

Additional Characteristics of the Trips10 100
Distribution of Max speed for Trips 20 100Distribution of Mean acceleration for Trips
6
8
10
ence
s (%
)
60
70
80
90
100
peed
(%)
Mean=57.9 mile/hMedian=61.1 mile/h
Std=16.1 mile/hNumber of Trip =363
12
16
renc
es (%
)
60
70
80
90
ccel
erat
ion
(%)
Mean=0.4 m/s2Median=0.4 m/s2Std=0.1 m/s2
2
4
Num
ber o
f occ
ure
20
30
40
50
Cum
ulat
ive
Max
s
4
8
Num
ber o
f occ
u
20
30
40
50
Cum
ulat
ive
Mea
n acNumber of Trip =363
0 20 30 40 50 60 70 80 90 100
0
10
Max speed (mile/h)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 1.1
0
10
C
Mean acceleration (m/s2)
10 100
Mean=28.5 mile/h
Distribution of Mean speed for Trips24
90
100Distribution of Mean deceleration for Trips
6
8
ccur
ence
s (%
)
50
60
70
80
90
ean
spee
d (%
)
Median=28.7 mile/h
Std=10.9 mile/h
Number of Trip =363
12
18
ccur
ence
s (%
)50
60
70
80
90
n de
cele
ratio
n (%
)
Mean=-0.5 m/s2Median=-0.4 m/s2Std=0.1 m/s2Number of Trip =363
2
4
Num
ber o
f oc
10
20
30
40
50
Cum
ulat
ive
M
6
12N
umbe
r of o
c
10
20
30
40
50
Cum
ulat
ive
Mea
nNumber of Trip 363
25
0 10 20 30 40 50 60
0
Mean speed (mile/h)0
-1.2 -1 -0.8 -0.6 -0.4 -0.2 00
Mean deceleration (m/s2)

Cycles Cross correlation Cross correlation
100150200
size
d
Distance vs. Max speed
Regression-50
0
P ess
harg
ing
er e
ach
cycl
e
100
200
Pes
s
disc
harg
ing
per e
ach
c
ycle
50100
P ess
Regression
50
100
Max
S
peed
0204060
Dist
ance
-100
Pch pe c
on
123
Max
ac
cele
ratio
n 0200040006000
Tim
e
0 81
e
tio
n
2040
60
Aver
age
spee
d
-4
-2
Max
de
cele
ratio
-1.2-1-0.8-0.6-0.4-0.2Average
0.20.40.6 0.8 1Average
20 40 60Average
-4 -2Max
1 2 3Max
0 200040006000Time
50 100Max
0 20 40 60Distance
-100 -50 0Pess
100 200Pess
50 100150200-1.2
-1-0.8-0.6-0.4-0.2
Pess sized
Aver
age
dece
lera
tion 0.2
0.40.60.8
Aver
age
acce
lera
t
26
decelerationaccelerationspeed decelerationaccelerationSpeedess
chargingper each cycle
essdischargingper each cycle
ess
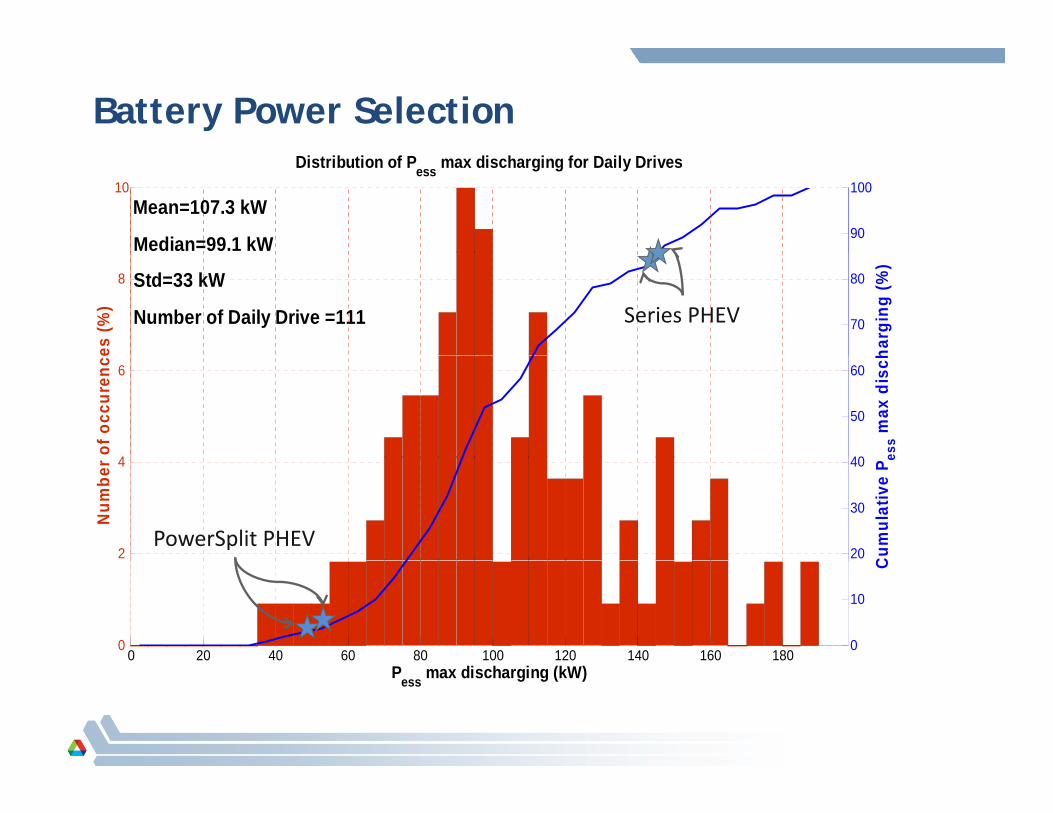
Battery Power Selection
10
90
100Mean=107.3 kW
Median=99.1 kW
Distribution of Pess max discharging for Daily Drives
8
es (%
)
70
80
harg
ing
(%)
Std=33 kW
Number of Daily Drive =111 Series PHEV
4
6
of o
ccur
ence
40
50
60
ess m
ax d
isch
2
4
Num
ber
20
30
40
Cum
ulat
ive
P e
PowerSplit PHEV
0 0 20 40 60 80 100 120 140 160 180
0
10
C
Pess max discharging (kW)
27
Di t ib ti f B tt E t f D il d i
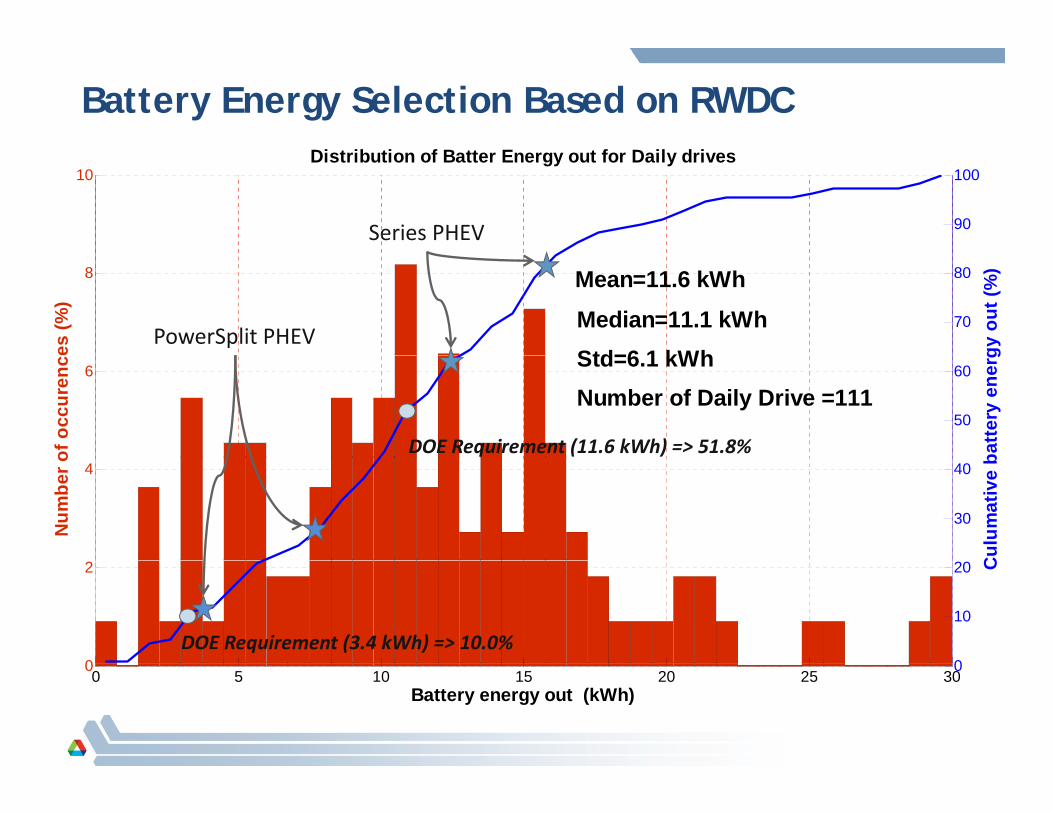
Battery Energy Selection Based on RWDC
10
90
100Distribution of Batter Energy out for Daily drives
Series PHEV
8
es (%
)
70
80
gy o
ut (%
)Mean=11.6 kWh
Median=11.1 kWhStd=6 1 kWh
PowerSplit PHEV6
of o
ccur
enc
50
60
batte
ry e
nergStd=6.1 kWh
Number of Daily Drive =111
DOE Requirement (11.6 kWh) => 51.8%4
Num
ber o
30
40
Cul
umat
ive
b
0
2
0
10
20 C
DOE Requirement (3.4 kWh) => 10.0%00 5 10 15 20 25 30
0
Battery energy out (kWh)
28
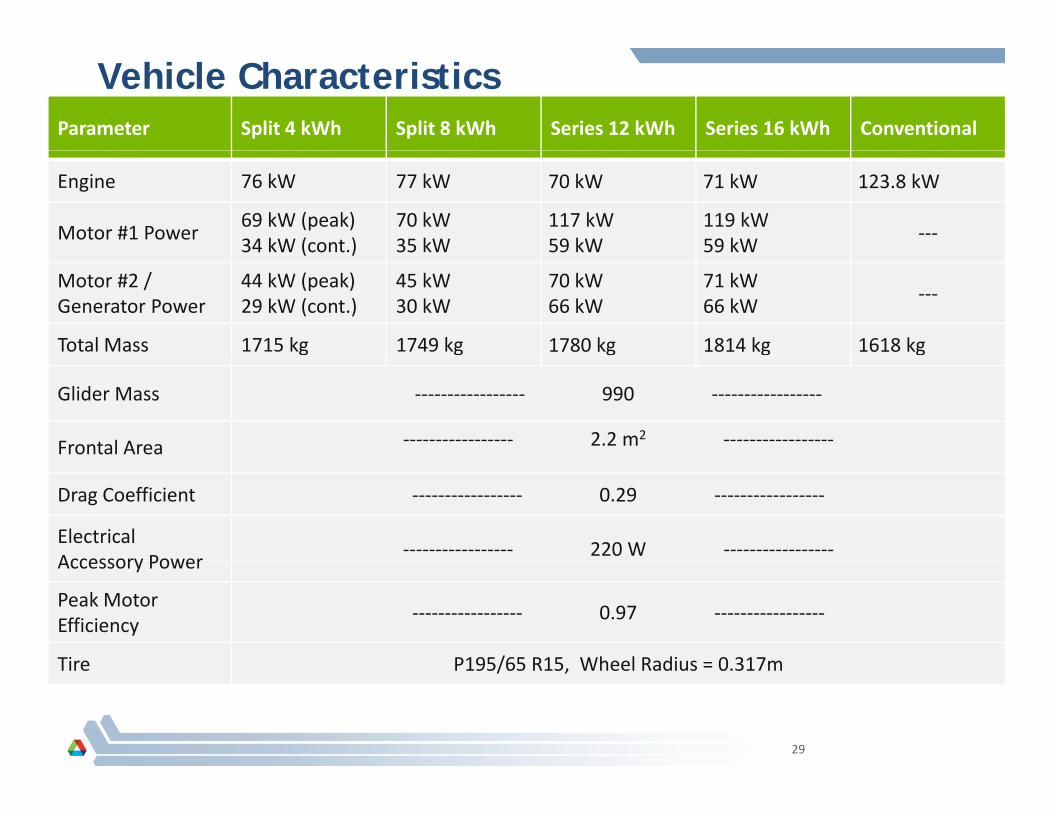
Vehicle CharacteristicsParameter Split 4 kWh Split 8 kWh Series 12 kWh Series 16 kWh Conventional
Engine 76 kW 77 kW 70 kW 71 kW 123.8 kW
Motor #1 Power69 kW (peak)34 kW (cont.)
70 kW35 kW
117 kW59 kW
119 kW59 kW
‐‐‐( )
Motor #2 /Generator Power
44 kW (peak)29 kW (cont.)
45 kW30 kW
70 kW66 kW
71 kW66 kW
‐‐‐
Total Mass 1715 kg 1749 kg 1780 kg 1814 kg 1618 kg
Glider Mass ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ 990 ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
Frontal Area ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ 2.2 m2 ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
Drag Coefficient ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ 0.29 ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
Electrical Accessory Power
‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ 220 W ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐Accessory Power
Peak MotorEfficiency
‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐ 0.97 ‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐‐
Tire P195/65 R15 Wheel Radius = 0 317m
29
Tire P195/65 R15, Wheel Radius = 0.317m





























