Embed Size (px)
Citation preview

PHY2053 Lecture 15 Ch. 7.5, 7.8: Center of Mass, Collisions

��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
(2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
�vCM = lim∆t→0
∆�rCM
∆t→ �rCM =
�i mi�ri�i mi
(4)
1
PHY2053, Lecture 15, Center of Mass, Collisions
Center of Mass• Wouldn’t it be nice if complex object motion could
be simplified to that of a single point? • according to Newton II, the acceleration should be:
2
��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
(2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
1
��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
1
��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
(2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
1
• Recall impulse - momentum theorem:
• Which leads us to the definition of rCM:

PHY2053, Lecture 15, Center of Mass, Collisions
Calc Example: Cut-out DiskA thin disk of radius R has a holeof radius R/2 drilled in it, as shownin the figure. Using the coordinatesystem shown in the figure, whatis the position of the center of massfor the disk?
1) (x=0 , y=0)2) (x=-R/2, y=0)3) (x=R/2, y=0)4) (x= R/6, y=0)5) (x=-R/6, y=0)
3
x
y
R

PHY2053, Lecture 15, Center of Mass, Collisions
Disk with Cutout:
4

PHY2053, Lecture 15, Center of Mass, Collisions
H-ITT: Distributionof Masses
A set of 6 identical masses are located on the tips of an equilateral hexagon with side length L. One of the masses is located at (x=L, y=0). The masses are arranged so that the CM is at (x=0, y=0). If we remove the mass located at (x=-L, y=0), where is the CM of the new system?
A)(x=-L/5 , y= 0 )B) (x= 0 , y= -L/7 )C)(x= 0 , y= 0 )D)(x= 0 , y= L/7 )E) (x=+L/5 , y= 0 )
5

PHY2053, Lecture 15, Center of Mass, Collisions
H-ITT: Distributionof Masses
A set of 8 identical masses are located on the tips of an equilateral octagon with side length L. One of the masses is located at (x=0, y=D). The masses are arranged so that the CM is at (x=0, y=0). If we remove the mass located at (x=0, y=D), where is the new CM of the system?
A)(x=-L/5 , y= 0 )B) (x= 0 , y= -L/7 )C)(x= 0 , y= 0 )D)(x= 0 , y= L/7 )E) (x=+L/5 , y= 0 )
6
PHY2053, Lecture 15, Center of Mass, Collisions
Example: M.I.R.V.
A projectile splits into N pieces at the highest point of its trajectory. The fragments land along a line so that the distances between neighboring fragments are the same. The first fragment was falling straight down from the highest point of the trajectory. If the projectile had not split up, it would have landed L away from the launch site. Compute thelanding points for the N fragments.
7
(Multiple Independently Targetable Reentry Vehicle)
PHY2053, Lecture 15, Center of Mass, Collisions
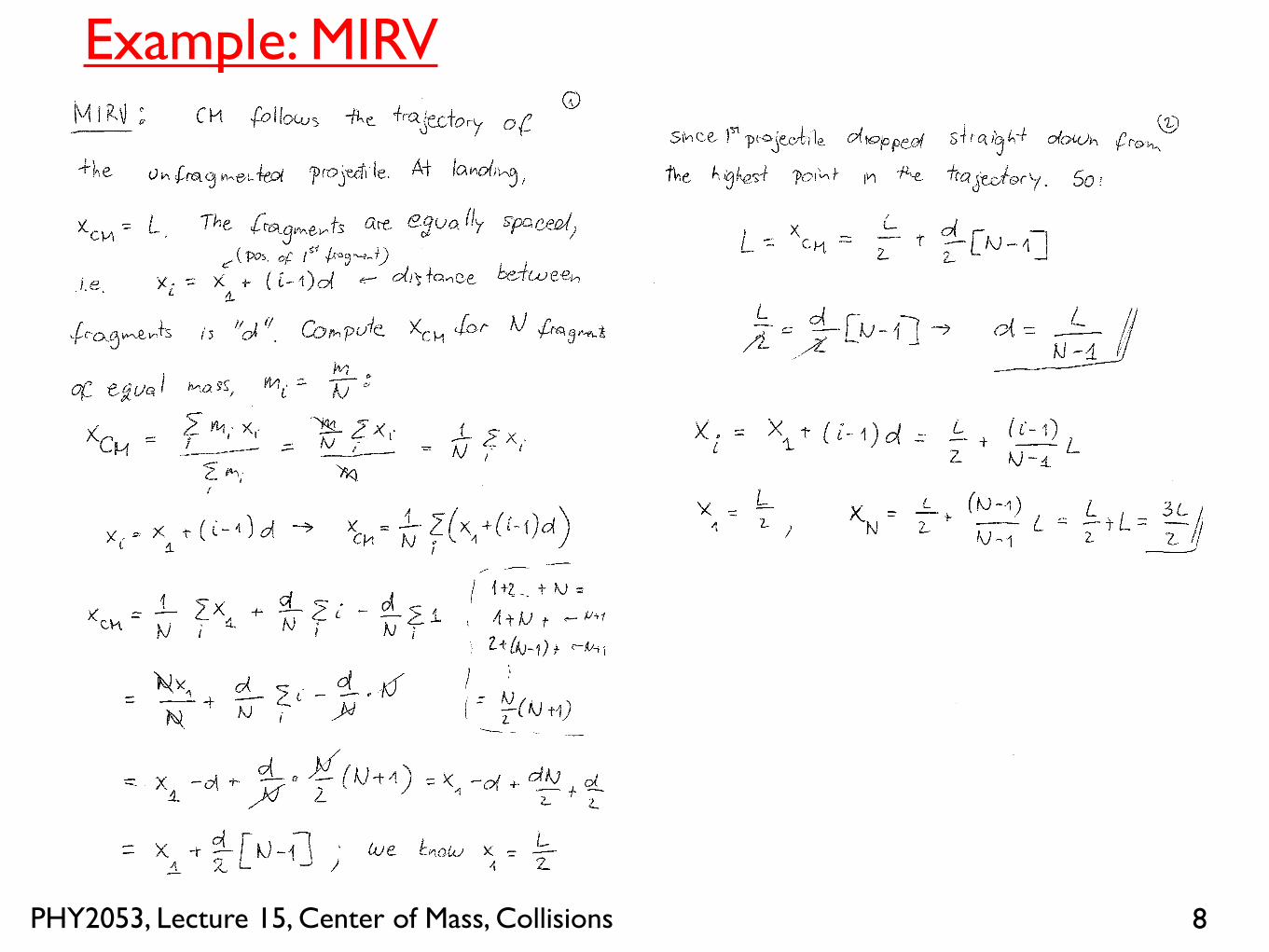
Example: MIRV
8

��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
� 0 → �ptotal ≡�
i
mi �vi = �const (2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
�vCM = lim∆t→0
∆�rCM
∆t→ �rCM =
�i mi�ri�i mi
(4)
vCM =m1v1,i −m2v2,i
m1 + m2(5)
v�1,i = v1,i − vCM =m2
m1 + m2(v1 + v2) (6)
v�2,i = v2,i − vCM = − m1
m1 + m2(v1 + v2) (7)
p�total = m1v1,i + m2v2,i =m1m2 −m2m1
m1 + m2(v1 + v2) = 0 (8)
�v�i = �vi − �vCM =
�j �=i mj (�vi − �vj)
�j mj
(9)
1
��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
� 0 → �ptotal ≡�
i
mi �vi = �const (2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
�vCM = lim∆t→0
∆�rCM
∆t→ �rCM =
�i mi�ri�i mi
(4)
vCM =m1v1,i −m2v2,i
m1 + m2(5)
v�1,i = v1,i − vCM =m2
m1 + m2(v1 + v2) (6)
v�2,i = v2,i − vCM = − m1
m1 + m2(v1 + v2) (7)
p�total = m1v1,i + m2v2,i =m1m2 −m2m1
m1 + m2(v1 + v2) = 0 (8)
�v�i = �vi − �vCM =
�j �=i mj (�vi − �vj)
�j mj
(9)
�p�total =�
i
�p�i =�
i
mi�v�i =
�
i
�
j �=i
mimj (�vi − �vj)�j mi
= 0 (10)
1
��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
� 0 → �ptotal ≡�
i
mi �vi = �const (2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
�vCM = lim∆t→0
∆�rCM
∆t→ �rCM =
�i mi�ri�i mi
(4)
vCM =m1v1,i −m2v2,i
m1 + m2(5)
v�1,i = v1,i − vCM =m2
m1 + m2(v1 + v2) (6)
v�2,i = v2,i − vCM = − m1
m1 + m2(v1 + v2) (7)
p�total = m1v1,i + m2v2,i =m1m2 −m2m1
m1 + m2(v1 + v2) = 0 (8)
�v�i = �vi − �vCM =
�j �=i mj (�vi − �vj)
�j mj
(9)
�p�total =�
i
�p�i =�
i
mi�v�i =
�
i
�
j �=i
mimj (�vi − �vj)�j mi
= 0 (10)
�
i
�p�i = 0 (11)
1
PHY2053, Lecture 15, Center of Mass, Collisions
The CM Reference Frame• recall definition of CM velocity, compute velocities as
observed in CM reference frame (S’):
9
��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
(2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
1
• total momentum observed in the CM reference frame:
• this will be a useful property in collision analysis and related calculations

PHY2053, Lecture 15, Center of Mass, Collisions
Collisions
10

PHY2053, Lecture 15, Center of Mass, Collisions
Collision Concepts• Collision event lasts a very short amount of time• Even if there are external forces acting upon the
system of colliding objects (friction etc), during this extremely short time, their effects are negligible
11
��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
� 0 → �ptotal ≡�
i
mi �vi = �const (2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
�vCM = lim∆t→0
∆�rCM
∆t→ �rCM =
�i mi�ri�i mi
(4)
1
• Total momentum of all colliding objects is conserved• Momentum is always conserved in collisions
(but it gets redistributed among the colliding objects)• Kinetic energy is not necessarily conserved: divide
collisions into elastic, partially elastic, inelastic, explosive• each category redistributes momenta in a different way

��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
� 0 → �ptotal ≡�
i
mi �vi = �const (2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
�vCM = lim∆t→0
∆�rCM
∆t→ �rCM =
�i mi�ri�i mi
(4)
vCM =m1v1,i −m2v2,i
m1 + m2(5)
v�1,i = v1,i − vCM =m2
m1 + m2(v1 + v2) (6)
v�2,i = v2,i − vCM = − m1
m1 + m2(v1 + v2) (7)
p�total = m1v1,i + m2v2,i =m1m2 −m2m1
m1 + m2(v1 + v2) = 0 (8)
�v�i = �vi − �vCM =
�j �=i mj (�vi − �vj)
�j mj
(9)
1
��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
� 0 → �ptotal ≡�
i
mi �vi = �const (2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
�vCM = lim∆t→0
∆�rCM
∆t→ �rCM =
�i mi�ri�i mi
(4)
vCM =m1v1,i −m2v2,i
m1 + m2(5)
v�1,i = v1,i − vCM =m2
m1 + m2(v1 + v2) (6)
v�2,i = v2,i − vCM = − m1
m1 + m2(v1 + v2) (7)
p�total = m1v1,i + m2v2,i =m1m2 −m2m1
m1 + m2(v1 + v2) = 0 (8)
�v�i = �vi − �vCM =
�j �=i mj (�vi − �vj)
�j mj
(9)
�p�total =�
i
�p�i =�
i
mi�v�i =
�
i
�
j �=i
mimj (�vi − �vj)�j mi
= 0 (10)
1
��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
� 0 → �ptotal ≡�
i
mi �vi = �const (2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
�vCM = lim∆t→0
∆�rCM
∆t→ �rCM =
�i mi�ri�i mi
(4)
vCM =m1v1,i −m2v2,i
m1 + m2(5)
v�1,i = v1,i − vCM =m2
m1 + m2(v1 + v2) (6)
v�2,i = v2,i − vCM = − m1
m1 + m2(v1 + v2) (7)
p�total = m1v1,i + m2v2,i =m1m2 −m2m1
m1 + m2(v1 + v2) = 0 (8)
�v�i = �vi − �vCM =
�j �=i mj (�vi − �vj)
�j mj
(9)
�p�total =�
i
�p�i =�
i
mi�v�i =
�
i
�
j �=i
mimj (�vi − �vj)�j mi
= 0 (10)
�
i
�p�i = 0 (11)
1
��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
� 0 → �ptotal ≡�
i
mi �vi = �const (2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
�vCM = lim∆t→0
∆�rCM
∆t→ �rCM =
�i mi�ri�i mi
(4)
vCM =m1v1,i −m2v2,i
m1 + m2(5)
v�1,i = v1,i − vCM =m2
m1 + m2(v1 + v2) (6)
v�2,i = v2,i − vCM = − m1
m1 + m2(v1 + v2) (7)
p�total = m1v1,i + m2v2,i =m1m2 −m2m1
m1 + m2(v1 + v2) = 0 (8)
�v�i = �vi − �vCM =
�j �=i mj (�vi − �vj)
�j mj
(9)
�p�total =�
i
�p�i =�
i
mi�v�i =
�
i
�
j �=i
mimj (�vi − �vj)�j mi
= 0 (10)
�
k
�p�k,initial =�
k
�p�k,final = 0; → �vk,final = �v�k,final + �vCM (11)
1
PHY2053, Lecture 15, Center of Mass, Collisions
The CM Reference Frame• recall definition of CM velocity, compute velocities as
observed in CM reference frame (S’):
12
��Fi =
�
i
mi�ai ≡�
�
i
mi
�
�aCM → �aCM =
�i mi�ai�i mi
(1)
���Fi
�∆t = ∆
��
i
mi �vi
�
(2)
��
i
mi �vi
�
≡�
�
i
mi
�
�vCM → �vCM =
�i mi �vi�i mi
(3)
1
• total momentum observed in the CM reference frame:
• useful property in CM : the redistributed momenta after the collision have to add up to zero:

PHY2053, Lecture 15, Center of Mass, Collisions
1D Collisions
• Simplify problem to 1D to focus on underlying principles, later move to 2D (more realistic)
• Further simplification: 2 body collisions • Center of mass velocity:
• Initial velocities of colliding objects in CM frame:
13
v1,i v2,i v1,f v2,fx
y
PHY2053, Lecture 15, Center of Mass, Collisions
(Fully) Elastic Collisions• Code language for: Total Kinetic Energy is conserved
• Utilize momentum conservation + K.E. conservation(slow, potentially cumbersome calculation)
• Move to CM reference frame - there are useful properties to take advantage of
• “approach speed equals separation speed”
14

PHY2053, Lecture 15, Center of Mass, Collisions
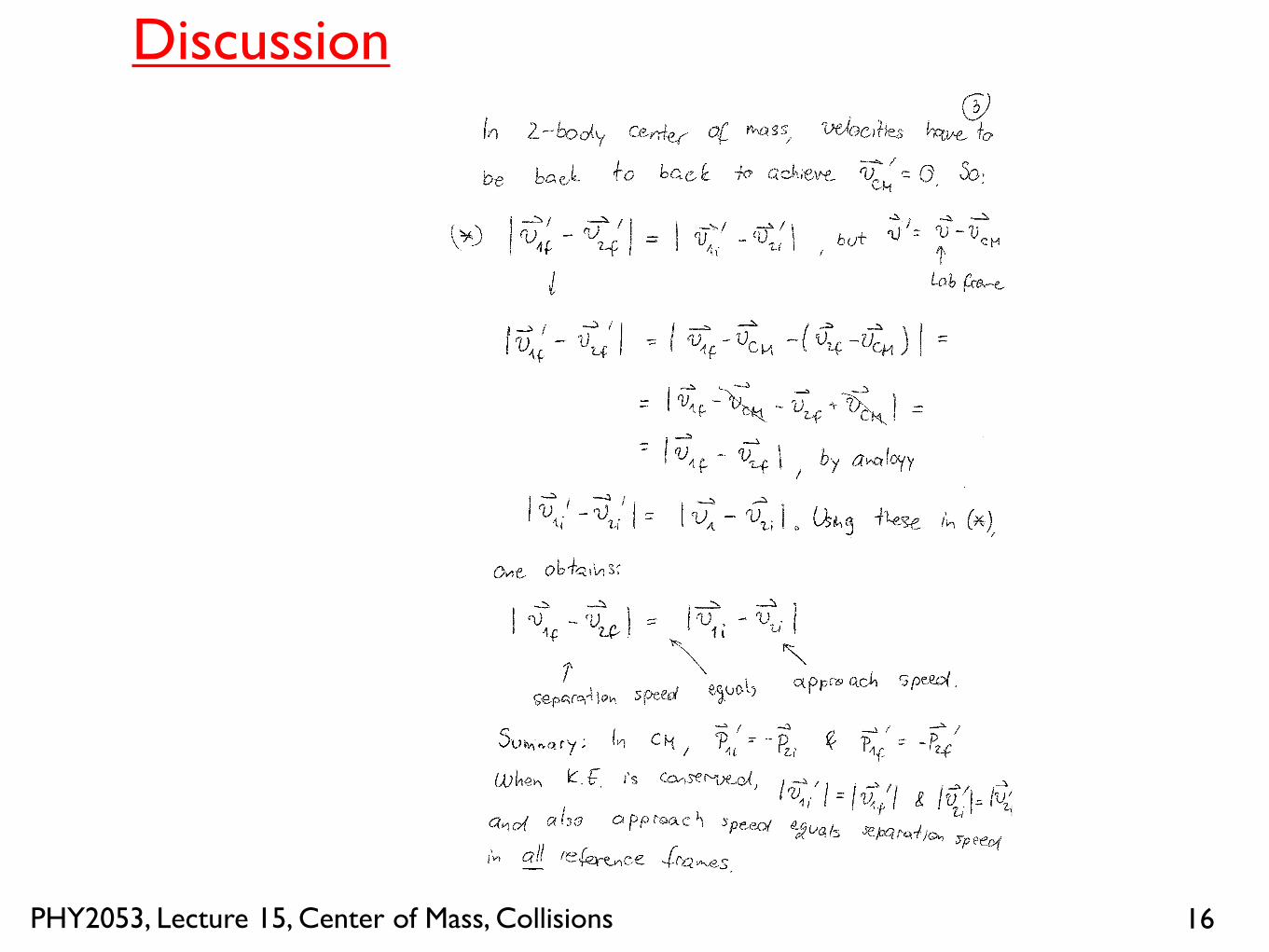
Discussion
15
PHY2053, Lecture 15, Center of Mass, Collisions
Discussion
16

Demo: Basketball Styrofoam Ball Cannon
PHY2053, Lecture 15, Center of Mass, Collisions
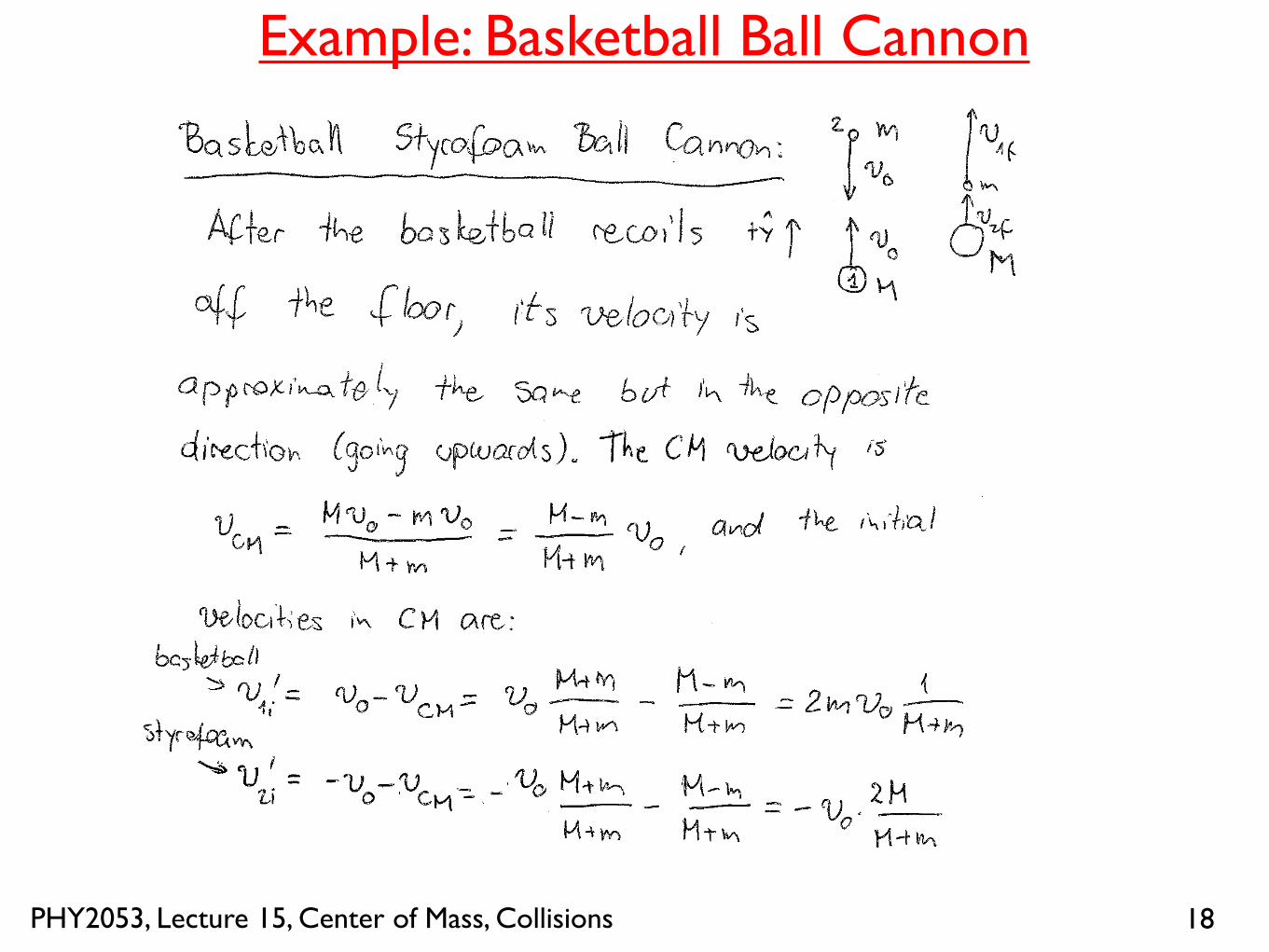
Example: Basketball Ball Cannon
18

PHY2053, Lecture 15, Center of Mass, Collisions
Example: Basketball Ball Cannon 2
19

PHY2053, Lecture 15, Center of Mass, Collisions
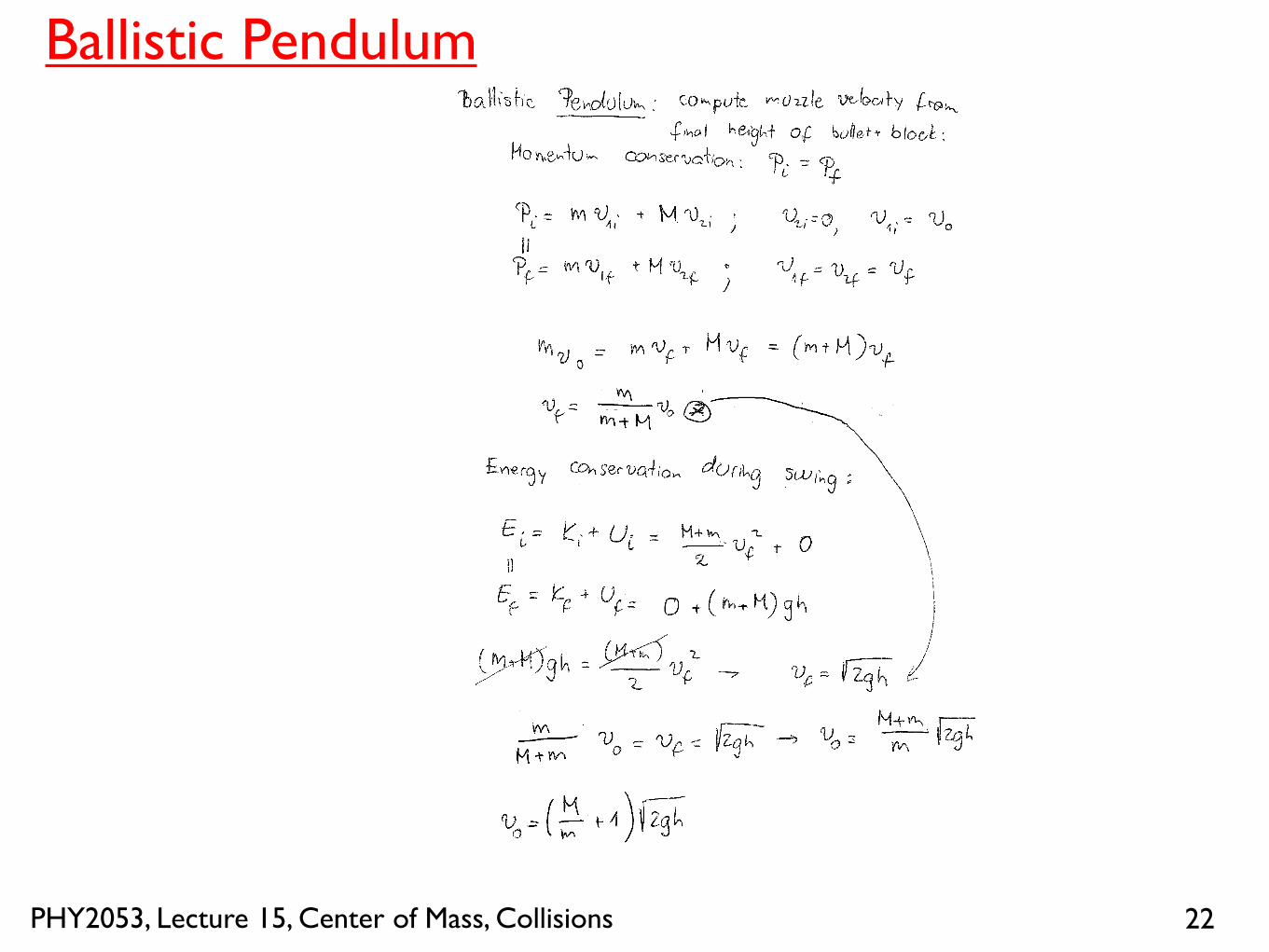
(Fully) Inelastic Collisions• Code language for: objects are stuck together after
the collision
• Utilize momentum conservation + property:v1,f = v2,f = vCM
• problems usually ask for system energy or velocity after collision
20

Demo: Ballistic Pendulum
PHY2053, Lecture 15, Center of Mass, Collisions
Ballistic Pendulum
22

PHY2053, Lecture 15, Center of Mass, Collisions
Partially Elastic Collisions• Code language for: dynamics are not simply elastic or
inelastic, a fraction of kinetic energy is lost• Only tool you can rely on: momentum conservation• illustration: generic 2-body collision problem• 4 “degrees of freedom” - 2 initial, 2 final velocities • typical problem will define initial velocities and one
final velocity, ask for other velocity and energy loss• or vice versa - define final, ask for initial velocity
23
PHY2053, Lecture 15, Center of Mass, Collisions
Explosive Collisions• Code language for: total kinetic energy of the system
is larger after the collision than it was before
• similar treatment to partially elastic collisions: can only rely on momentum conservation to solve
24

Demo: Soda Cans and Firecrackers

Demo: Milk Jug Rocket

PHY2053, Lecture 15, Center of Mass, Collisions
2D Collisions
• momentum is now conserved as a 2D vector quantity, need to take this into account
• special case of snooker / pool shot ignoring spin:after collision the velocities of the two balls are perpendicular to each other
27

Demos: 2D Collision Table2D Collision Video

Next LectureCh. 8.1-8.3:
Rotational Kinetic Energy, Rotational Inertia,
Torque

PHY2053, Lecture 15, Center of Mass, Collisions
Demos
• map of state of Florida - actually that is torque• spunge with center-of-mass point• basketball styrofoam ball cannon• elastic collisions and inelastic collisions• soda cans and firecrackers• milk jug rocket• ballistic pendulum• demonstration of impulse (is this mom. conserv?)
30








![Physics 1 (PHY2053), Fall 2014 Syllabus - Department … of Physics, University of Florida Physics 1 [PHY2053] Syllabus, Fall 2014 Physics 1 (PHY2053), Fall 2014 Syllabus ... Department](https://img.pdfslide.net/doc/110x75/5b3264877f8b9adf6c8c0de1/physics-1-phy2053-fall-2014-syllabus-department-of-physics-university-of-florida.jpg)



















