Embed Size (px)
Citation preview

Piecewise Linear Relaxation Techniques for Solution of Nonconvex
Nonlinear Programming Problems
Pradeep K. Polisetty and Edward P. Gatzke∗
Department of Chemical Engineering
University of South Carolina
Columbia, SC 29208.
Abstract
A piecewise linear relaxation technique is presented for generation of mathematical programming
relaxations of nonconvex nonlinear programming (NLP) problems. In this method, the original nonconvex
nonlinear problem is converted to a Mixed-Integer Linear Programming (MILP) problem using logical
constraints and outer approximations of convex function relaxations. A global solution of this MILP
problem serves as a lower bound to the original problem. It may be possible to tighten the original problem
variable bounds by use of a MILP-based bound contraction procedure. In some cases, multiple iterations of
MILP-based bound contraction can aid in derivation of tighter variable bounds. The proposed techniques
are implemented on several global optimization test problems. Computational results demonstrate that
the gap between the lower bound and the upper bound can be significantly decreased by implementing the
proposed technique. Additionally, the solution time using this method can be decreased significantly when
variable contraction is performed in parallel.
Keywords
Piecewise linear relaxations, global optimization, variable space contraction, parallel optimization, branch-
and-bound, branch-and-reduce.
∗Author to whom correspondence should be addressed: [email protected]
1

1 Introduction
Many industrial and engineering problems exhibit nonlinearity when posed as numerical optimization problems. Several
algorithms have been developed to solve these optimization problems. While considerable progress has been made in solving
global optimization problems, significant opportunities exist for further improvement. Branch-and-Bound [Falk and Soland,
1969] methods rely on generation of both lower and upper bounds on the problem objective function. The solution space is
partitioned into regions until the lower bound on each partition is sufficiently close to or exceeds the overall problem upper
bound. Any feasible local solution to the original nonconvex problem may serve as an initial upper bound for the global
solution. Branch-and-Reduce [Ryoo and Sahinidis, 1995] extends the Branch-and-Bound algorithm, implementing bound
tightening techniques to aid in rapid convergence of the algorithm. Reduction of the feasible space of any problem partition
generally improves the lower bound on the partition, typically improving the problem convergence rate. Deterministic
methods such as spatial Branch-and-Bound [Horst and Tuy, 1993,Quesada and Grossmann, 1993] and Outer approximation
algorithms for separable nonconvex mixed-integer nonlinear programs [Gatzke and Voit, 2004] also depend on generation
of relaxations of the original nonconvex nonlinear problems.
Numerous methods [Adjiman et al., 1998, McCormick, 1976, Tawarmalani and Sahinidis, 2002, Gatzke et al., 2002a]
have been proposed to construct relaxations needed for the global solution of nonconvex optimization problems. The
reformulation method of McCormick [McCormick, 1976, Smith, 1996, Byrne and Bogle, 1999] converts the original
factorable nonconvex nonlinear algebraic functions into an equivalent form by the introduction of new variables and
constraints. The reformulated problem contains only linear and simple nonlinear constraints. The convex relaxations for
the simpler nonlinear constraints can be constructed using the convex and concave envelopes which are known for many
simple algebraic functions. The αBB method [Adjiman et al., 1998, Adjiman et al., 1996] also generates convex relaxations
for general twice-differentiable constrained NLP’s. One advantage of this method as compared to the basic reformulation
technique is that αBB does not require introduction of new variables. The αBB method requires the determination of bounds
on the minimum eigenvalues of the hessian of the nonconvex functions. The Hybrid relaxation method [Gatzke et al.,
2002b] combines both basic reformulation and αBB methods. This method may be advantageous in some cases where one
of the above mentioned methods fails to generate a tight convex relaxation for the original NLP. Convex linear relaxations
can also be generated by using the linearization strategy of Tawarmalani and Sahinidis [Tawarmalani and Sahinidis, 2000].
This method generates a convex nonlinear relaxation for the original factorable nonlinear problem. This nonlinear convex
relaxation is further relaxed using multiple linearizations based on outer approximation at multiple points. The feasible space
resulting from these outer approximations gives a convex linear relaxation of the original nonlinear problem. The bound on
the relaxed problem is found by the solution of the resulting convex Linear Programming (LP) problem.
Global optimization algorithms, when used with the existing relaxation techniques may require a large amount of time to
converge to the global solution. In this work, a MILP-based piecewise linear relaxation technique is used for generation of
relaxations of nonconvex functions. This work considers nonconvex NLP’s that only have continuous variables in the original
2

problem. Using McCormick’s [McCormick, 1976] reformulation method together with propositional logic constraints [Tyler
and Morari, 1999], the original nonlinear nonconvex problem is relaxed to a MILP problem. The global solution to this
MILP problem provides a lower bound on the original problem. This method can be advantageous in cases where the
above mentioned relaxation methods fail to generate tight relaxations for the original problem, with the reservation that it
requires the solution to a nonconvex MILP problem. The availability of robust Mixed Integer Programming (MIP) solvers
like CPLEX 8.1 [ILOG, 2002] and IBM OSL [I. B. M. , 1997] may justify the use of this particular technique in many cases
for solving nonconvex nonlinear problems.
Obviously, global solution of a lower bounding nonconvex MILP at every node in a Branch-and-Bound search tree is not
desirable. Instead, any feasible integer solution to the MILP problem can still be a valid lower bound on the problem. The
MILP relaxation can provide a tight lower bound for a single partition using robust MILP solution methods. The quality
of this lower bound can be modified by changing the number of piecewise linear regions used in the lower bounding MILP
problem.
The MILP relaxation technique can also be used for optimization-based bound tightening [Smith, 1996, Ryoo and
Sahinidis, 1995, Adjiman et al., 2000]. After obtaining a local upper bounding solution for the original NLP problem, it
may be possible to tighten the bounds on any variable by solving two optimization problems. These two problems are
modified versions of the relaxed problem formulation which include an upper bound cut. This optimization-based bound
tightening technique may help avoid branching of the original problem space during Branch-and-Reduce global optimization
algorithm. This bound tightening technique can be applied on each of the n original variables in the problem, requiring the
solution of 2n optimization problems.
The proposed MILP-based bound contraction technique when implemented on some problems may require a significant
amount of time when solved on a single serial computer. In order to both decrease the computational burden and increase the
efficiency of the algorithm, the proposed MILP-based bound contraction technique can be implemented in parallel [Polisetty
and Gatzke, 2003]. This exploits the fact that the optimization-based bound tightening problems are decoupled from one
another. Instead of contracting bounds of every variable, selecting those variables which may contribute the most to the
gap between the original nonconvex problem and the relaxed problem can prove to be as effective and still reduce the
computational burden.
2 MILP Based Relaxation/ Problem Formulation
Deterministic global optimization techniques typically rely on generation of convex relaxations of the original problem.
Tighter relaxations usually result in faster convergence of the global algorithm. Tighter relaxations can aid in minimizing
the partitioning of the solution space during the global optimization algorithm. A MILP-based piecewise linear relaxation
technique is used in the current work to derive nonconvex relaxations to the original nonconvex nonlinear programming
problem.
3

Propositional logic is used to divide the solution space for a given problem partition into multiple regions by introduction
of a single binary variable for each region. The constraints corresponding to the region in which the solution lies are enforced
while relaxing the constraints corresponding to other regions. First, the established reformulations for NLP and LP based
relaxations are presented. The MILP-based relaxation is derived from the LP-based relaxation by use of propositional logic
constraints. The LP-based and NLP-based relaxations are then compared to the MILP-based piecewise linear relaxation.
Note that the MILP-based relaxation technique may add numerous binary variables and linear constraints. McCormick’s
reformulation technique is applied to the original problem shown in Equation 1:
P =
minx
f (x)
s.t. g(x) ≤ 0
xl ≤ x ≤ xu
(1)
Here, x ∈ Rn and f : R
n → R is the objective function, and g : Rn → R
m are inequality constraints. This problem is
reformulated to a equivalent simpler form by introducing new variables for separable nonconvex nonlinear terms. Here,
the objective function and the constraint functions may be nonlinear. The reformulated problem takes the form shown in
Equation 2.
P1 =
minx,w
CT[
xT wT]T
s.t A1[
xT wT]T
≤ B1
A2[
xT wT]T
= B2
w = η(x,w)
xl ≤ x ≤ xu
wl ≤ w ≤ wu
(2)
In Equation 2, w ∈ Ro+l is a vector of the o new nonlinear variables and l new linear variables introduced, CT [xT wT ]T is
the linear objective function, A1[xT wT ]T ≤ B1 are the linear inequality constraints resulted from the inequality constraints
of the original problem shown in Equation 1, A2[xT wT ]T = B2 are new linear equality constraints defining the new linear
variables, and w = η(x,w), η : Rn ×R
o → Ro provides the relationship between the new nonlinear variables and original
variables. The advantage of this reformulation is that the new functions ηi contain simple nonlinear terms relating only 2
or 3 variables. Bounds on w can be inferred from bounds on x using interval analysis [Moore, 1979]. The reformulated
problem contains only linear and simple nonlinear constraints for which convex relaxations can be constructed using convex
envelopes known for many algebraic functions. Convex relaxations can be generated in a various number of ways. The
NLP-based convex relaxation is shown in Equation 3.
4

P2 =
minx,w
CT[
xT wT]T
s.t. A1[
xT wT]T
≤ B1
A2[
xT wT]T
= B2
η(x,w,xl,xu,wl,wu) ≤ w ≤ η(x,w,xl,xu,wl,wu)
xl ≤ x ≤ xu
wl ≤ w ≤ wu
(3)
Here, η and η are the convex under and concave over estimates of the original nonconvex expressions. The solution to
this relaxed problem will serve as a lower bound to the original problem. Problems described by Equation 3 can be further
relaxed to a Linear Programming (LP) problem by use of multiple linearizations of the convex nonlinear functions. The
resulting LP relaxation problem is of the form shown in Equation 4.
P3 =
minx,w
CT[
xT wT]T
s.t. A1[
xT wT]T
≤ B1
A2[
xT wT]T
= B2
A3[
xT wT]T
≤ B3
xl ≤ x ≤ xu
wl ≤ w ≤ wu
(4)
Here, A3[
xT wT]T
≤ B3 expresses the new linear constraints obtained from multiple outer approximations of the convex
and concave functions in Equation 3. Note that A3 , B3 and the bounds on w will change as the bounds on x are modified.
The proposed MILP-based piecewise linear relaxation technique can generate tighter relaxations as compared to those
generated by LP-based and NLP-based relaxation methods. The problem space for the nonlinear terms is divided into
multiple regions using propositional logic constraints. Outer approximations of nonlinear functions and secant under-
estimates and over-estimates are then generated for each individual region, thereby converting the original nonlinear problem
into a mixed integer linear programming problem. Most of the constraints in this MILP problem are relaxed while enforcing
only those constraints corresponding to the single region containing the solution.
The MILP-based piecewise linear relaxation technique is illustrated on an example constraint which has a simple
nonlinear term, w = xc. Here, w is the new variable introduced during reformulation and c is a non-integer constant. The
variable space for x is divided into S regions separated by (S−1) boundaries. A binary variable is introduced for each region
resulting in S new binary variables. For the S regions, 2(S− 1) propositional logic inequality constraints are then added to
5

represent these regions. In this technique, b1 is forced to a take a value of 1 if x is in between xl and s1, where s1 is the upper
bound on the first region. The first region constraint is specified as follows:
−s1 + x ≤ M(1−b1)
The regions 2 through (S−1) are specified with the following constraints:
s1 − x+δ ≤ M(1−b2)
−s2 + x ≤ M(1−b2)
s2 − x+δ ≤ M(1−b3) (5)
−s3 + x ≤ M(1−b3)
...
where δ is a small value used to ensure that the value of the variable x does not end up at the boundaries separating the
regions. The final region constraint is specified as follows:
s(S−1)− x+δ ≤ M(1−bS)
Since only a single region can contain the solution, an equality constraint is added to ensure that solution lies in only one
region.
S
∑i=1
bi = 1 (6)
Based on these propositional logic constraints and the constraint shown in Equation 6, if the value of the variable x is
smaller than s1, the binary variable b1 is forced to take value of 1. On the other hand, if a binary variable takes a value
of zero, the respective constraint is relaxed as the right hand side takes a large value of M. The nonlinear expression is
replaced by outer approximation constraints written for each region. Depending on the number of linearizations, O, used to
outer approximate the nonlinear expression in each piecewise region, the linear over-estimate constraints for the nonlinear
expression in this example can be written as follows:
w ≤ f (x)|x=x∗i, j+
∂ f (x)∂x
∣
∣
∣
∣
x=x∗i, j
(x− x∗i, j)+ M(1−bi)
∀x∗i, j, where j = 1..O and ∀ i = 1..S
where x∗i, j are the linearization points, f (x) = xc is the nonlinear expression, and ∂ f (x)
∂x is the gradient of the function, which
6

in this example is cxc−1. For each region, this function can be under estimated by a secant constraint written as follows:
secant(xc, xL
, xU ) ≤ w+M(1−bi) ∀ i = 1...S
where xL, xU are the lower and upper bounds for a particular region. If the binary variable related to a particular region takes
a value of 1, the corresponding linearization and secant constraints are enforced while relaxing the constraints corresponding
to other regions. The final MILP-based piecewise linear relaxation problem can be represented in a general form as follows:
P4 =
minx,w,z
C[
xT wT]T
s.t. A1[
xT wT]T
≤ B1
A2[
xT wT]T
= B2
A3[
xT wT]T
≤ B3
A4[
xT wT zT]T
≤ B4
z ∈ {0,1}Q
xl ≤ x ≤ xu
wl ≤ w ≤ wu
(7)
Here, z are the binary variables introduced and A4[
xT wT zT]T
≤ B4 are the linear constraints representing logic constraints,
outer approximation constraints, and secant constraints for all Q regions. Note that removal of the logic constraints
A4[
xT wT zT]T
≤ B4 and binary variables results in the equivalent LP-based convex relaxation.
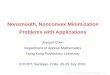
The nonlinear expression w = xc with outer approximation constraints and secant under estimation constraint are
illustrated in Figure 1. In this example, the variable space for x is divided into 2 regions and 2 linearizations are derived for
the each region. Complex factorable nonlinear problems can be automatically reformulated using McCormick’s method so
that the final reformulated problem has expressions which involve only 2 or 3 variables. These simple expressions include
bilinear terms xy, variable raised to constants xc, where c can be non integer constant, even integer, odd integer, or negative
integer. Other expressions include natural log of a variable ln(x), exponential of a variable exp(x), sin(x), cos(x). In the
case of bilinear terms, binary variables and logic constraints can be used for both variables. MILP-based piecewise linear
relaxations can be developed to nonconvex problems involving these simple nonlinear terms.
The MILP-based piecewise linear relaxation is now compared to that of LP-based linear relaxation for a standard global
optimization test problem [Dixon et al., 1975] shown in Equation 8.
7

minx
4x21 −2.1x4
1 + 13 x6
1 + x1x2 −4x22 +4x4
2
where −4 ≤ (x1,x2) ≤ 4 (8)
For this problem, the objective function surface, the MILP-based piecewise relaxation surface, and the LP-based relaxation
surface are shown in Figure 2. The MILP-based piecewise relaxation is generated by considering 4 regions for each nonlinear
expression involved in the problem. This figure demonstrates that the MILP-based lower bound is far improved as compared
to that of LP-based lower bound for this problem. Since the gap between the objective function and that of the MILP based
lower bound is small, this may aid in rapid convergence of global optimization algorithms, thereby requiring fewer partitions
while searching for the global solution.
Deterministic global optimization techniques like Branch-and-Bound and Branch-and-Reduce methods depend on
generation of relaxations of the original nonconvex problem. In the Branch-and-Bound method, a LP-based relaxation
of the original nonlinear problem is first constructed. The solution to this relaxation problem provides a valid lower bound
on the original problem. Local minimization techniques can be employed to obtain an initial upper bound for the problem.
The feasible region is then divided into partitions and lower bounds are generated for the new partitions. The algorithm
terminates when the lower bounds for all partitions either exceeds or are sufficiently close to the global upper bound. A more
detailed description of Branch-and-Bounds methods can be found in [Falk and Soland, 1969, Ryoo and Sahinidis, 1995].
It may be possible to generate much tighter relaxations by using the proposed MILP-based piecewise linear relaxation
technique as compared to LP-based relaxation technique for each partition during the Branch-and-Bound methods. This
may aid in rapid convergence of the algorithm. The obvious disadvantage is that a MILP must be solved at each node in the
Branch-and-Bound tree if this MILP-based relaxation is to be used. A graphical interpretation of Branch-and-Bound method
using MILP-based relaxation technique for a single step is given in Figure 3.
3 MILP-based Bound Contraction
Typical global optimization problems may have tens or hundreds of variables. Interval analysis bound tightening [Moore,
1979], and optimization-based bound tightening [Ryoo and Sahinidis, 1995, Smith, 1996, Adjiman et al., 2000] may aid in
derivation of tighter variable bounds by eliminating infeasible region or regions that can be proven to not include a solution
any better than the current upper bound. The MILP-based bound contraction shown in Figure 4 is similar to optimization-
based bound tightening, except in the former a MILP-based piecewise relaxation is used and in the later a LP relaxation is
used. These bound tightening procedures can be applied on any partition during the Branch-and-Reduce algorithm. The
proposed MILP-based bound contraction technique may help avoid branching of the original problem space during Branch-
and-Reduce global optimization algorithm. It is shown in Theorem 1 by contradiction that the MILP-based bound contraction
8

technique will not eliminate a point feasible in the original problem P1 with an objective function value less than the current
upper bound. This theorem is graphically demonstrated in Figure 5. After obtaining any local upper bounding solution, it
may be possible to tighten the bounds on any variable xi by solving two MILP-based piecewise linear relaxation problems
with an upper bound cut formulated as :
P5 =
minx,w,z
±xi
s.t C[
xT wT]T
≤ ubd
A1[
xT wT]T
≤ B1
A2[
xT wT]T
= B2
A3[
xT wT]T
≤ B3
A4[
xT wT zT]T
≤ B4
z ∈ {0,1}Q
xl ≤ x ≤ xu
wl ≤ w ≤ wu
(9)
where ubd is the current upper bound on the problem.
Theorem 1. MILP-based bound contraction problem P5 will not eliminate a point feasible in the original problem P1 with
objective function value (O) < current upper bound (UBD).
Problem P1 - Reformulated problem shown in Equation 2.
Problem P4 - MILP-based piecewise linear relaxation problem shown in Equation 7.
Problem P5 - MILP-based bound contraction problem shown in Equation 9.
Proof.
Assumption: Problem P4 is a relaxation of the problem P1 i.e. O(P4) ≤O(P1)
Know that problem P5 includes a upper bound cut on problem P4. Assume there exists a point p∗ in the region eliminated
by problem P5 but is feasible in problem P1, whose objective function value O(p∗)<UBD. Since problem P4 is a relaxation
of problem P1, p∗ must be a feasible point in P4. However the upper bound cut added to problem P4 to derive problem P5
contradicts the existence of this point. Therefore p∗ is infeasible in P5. Hence problem P5 cannot eliminate a point feasible
in the original problem P1 with objective function value (O) < current upper bound (UBD). ¤
The proposed MILP-based bound contraction technique is implemented on the test problem shown in Equation 8. The
MILP-based bound contraction technique is first implemented sequentially for contraction of the bounds on the original
variables at the root node of the Branch-and-Reduce tree. Computational results are presented for multiple iterations of
MILP-based bound contraction with varying number of regions. After deriving tighter bounds using the MILP-based bound
contraction technique, interval analysis is used to further tighten the variable bounds. Finally, the LP-based lower bound
9

is determined for each iteration. The LP-based lower bound for multiple iterations of MILP-based bound contraction with
varying regions and the upper bound for this problem are shown in Figure 6.
In Figure 6, the results for 1 region in the MILP-based relaxation are equivalent to those using just the LP-based relaxation
for bounds contraction. Examining this figure, using the LP-based relaxation for optimization-based bounds contraction
results in no improvement of the lower bound for the root node partition. This can be inferred from Figure 2. A upper bound
objective function cut at −1.0 for the LP-based relaxation would not aid in reducing the bounds for x1 and x2. This can be
seen by examining the four planes x1 =±1 and x2 =±1. There are multiple feasible points in these planes with the objective
function cut, implying no improvement in the bounds using bounds contraction. On the other hand, the MILP-based bound
contraction results in some improvement. However, the two nearly equivalent local minima limit the extent of possible
bounds contraction. In this problem, partitioning of the root node would be necessary for global convergence.
The MILP-based piecewise linear relaxation technique with optimization bound tightening was implemented on Heat
exchanger network design [Liebman et al., 1986] and Reactor network design [Manousiouthakis and Sourlas, 1992] problems
shown in Equations 10 and 11.
minx
x1 + x2 + x3
36000x1 −100000x4 −120x1x4 = −10000000
32000x2 +100000x4 −100000x5 −80x2x5 = 0 (10)
4000x3 +50000000x5 = = 50000000
(0,0,0,100,100) ≤ x ≤ (15834,36250,10000,300,400)
The global optimal solution for this problem is x = (579.307,1359.97,5109.97,182.018,295.601) with objective function
value of 7049.249.
minx
−x4
x1 + k1x1x5 = 1
−x1 + x2 + k2x2x6 = 0
x1 + x3 + k3x3x5 = 1 (11)
−x1 + x2 − x3 + x4 + k4x4x6 = 0
x0.55 + x0.5
6 ≤ 4
(0,0,0,0,0,0) ≤ x ≤ (1,1,1,1,16,16)
10

where k1 = 0.0976, k2 = 0.99k1, k3 = 0.0392, and k4 = 0.9k3. The global optimum for this problem is x =
(0.7715,0.517,0.204,0.388812,3.037,5.096) with objective function value of −0.388812.
The LP-based lower bounds for multiple passes of MILP-based bound contraction with varying regions and the upper
bound for the Heat exchanger network design problem are shown in Figure 7. Similar implementation is performed on
Reactor network design problem and the LP-based lower bounds and the upper bound for the problem are shown in Figure
8. It should be noted that for both the cases, the gap between the global upper bound and LP-based lower bound decreased
significantly prior to global search for the solution as the number of passes of MILP-based bound contraction and number of
regions are increased.
Increasing the number of regions and performing multiple passes may take a significant amount of time. To alleviate
this problem, the MILP-based bound contraction can be implemented in parallel, as the optimization based bound tightening
problems are decoupled. This bound tightening technique can be applied on each of the n original variables in the problem,
which requires the solution of 2n optimization problems. In order to decrease the computational burden and increase the
efficiency and speedup of the algorithm, the proposed optimization technique is implemented in parallel. This exploits the
fact that the optimization based bound tightening problems given in Equation 9 are all decoupled from one another.
4 Parallel Bound Contraction
The proposed MILP-based bound contraction can significantly improve the lower bound on the problem before any
partitioning of the variable space is performed. However, this technique may consume a considerable amount of time for
certain problems when implemented on a single processor. The main objective in parallelizing the sequential MILP-based
bound contraction technique is to distribute the work among several processors so as to minimize the overall time required
to solve 2n optimization problems. For this, the proposed technique is implemented on multiple processors using 2 Manager
/ Worker paradigm described in Figure 9.
In this parallel implementation, an application running as Manager 1 formulates the MILP-based bound contraction
problem and transfers the problem through a FIFO pipe [Brian, 1997] to another manager. The advantage of using a FIFO
pipe is that unrelated processes can communicate and receive problem data through this pipe. Manager 1 then waits for
the results file containing new variables bounds from Manager 2. Manager 2 sends the original variable bounds to worker
processors. The worker processors then solve the MILP-based optimization problem and returns the new variable bounds to
the Manager 2. Manager 2 then passes the results to Manager 1. The standard Message Passing Interface (MPI) [Forum,
1997] is used for communication between the processors. The presented parallel technique can implement multiple passes
of optimization bound contraction technique, thereby generating extremely tight bounds. This algorithm is implemented on
a Beowulf style computer using CPLEX 8.0 [ILOG, 2002] for solution of MILP problems. The machine has 32 nodes, each
with a single 933 MHz Pentium-3, 1Gbyte of memory, and 15 Gbytes of disk space.
The proposed parallel technique has been tested on Heat exchanger network design and Reactor network design problems
11

presented earlier. The total time required to perform multiple iterations of MILP based optimization bound tightening with
varying regions, both for serial and parallel implementations are shown in Table 1 for the Heat exchanger network design
problem. For illustration, 2n processors are used as workers, where n is the number of original variables in the problem.
Computational results demonstrate that total time decreased significantly in the parallel implementation.
Results for the Reactor network design problem are shown in Table 2. It is observed that for problems of these size, the
total time required to perform multiple iterations of MILP-based bound tightening for 1 and 2 regions are almost similar for
both serial and parallel implementation. This is due to synchronization and communication overhead between the manger
and worker processors. In many cases, overhead due to communication and synchronization between manger and worker
processors may consume significant amount of time. However, significant decrease in time can be obtained for many
engineering optimization problems as they involve hundreds or even thousands of variables.
5 Conclusions
In this paper, a MILP-based piecewise linear relaxation has been used for generation of relaxations of nonconvex expressions.
Using McCormick’s [McCormick, 1976] reformulation method together with the propositional logic constraints method, the
original nonlinear nonconvex problem is relaxed to a MILP problem. The solution to this MILP problem serves as the lower
bound to the original problem. Upon obtaining any local upper bounding solution, it may be possible to tighten the bounds
on any variable by solving two MILP-based relaxation problems with an upper bound cut. In some cases, multiple passes of
optimization based bound tightening can help in deriving tighter bounds. This technique helps in avoiding branching of the
original problem space during Branch-and-Reduce global optimization algorithm. The proposed technique is implemented
on several problems and the computational results justify the use of MILP-based piecewise linear relaxation technique
for solving global optimization problems. Substantial decrease in time can be obtained by utilizing the proposed parallel
tightening technique.
Acknowledgments
The authors would like to acknowledge financial support from the National Science Foundation under Grant No. 0238663.
The parallel computations were performed on the 32-node Beowulf cluster, daniel, in the Department of Computer Science
and Engineering at USC. We thank Dr. Duncan Buell for access to this machine. Any opinions, findings, and conclusions or
recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National
Science Foundation.
12

References
[Adjiman et al., 2000] Adjiman, C. S., Androulakis, I. P., and Floudas, C. A. (2000). Global Optimization of Mixed-Integer
Nonlinear Problems. AIChE J., 46(9):1769–1797.
[Adjiman et al., 1996] Adjiman, C. S., Androulakis, I. P., Maranas, C. D., and Floudas, C. A. (1996). A Global Optimization
Method, α BB, for Process Design. Comput. Chem. Eng., 20:S419–S424.
[Adjiman et al., 1998] Adjiman, C. S., Dalliwig, S., Floudas, C. A., and Neumaier, A. (1998). A Global Optimization
Method, αBB, for General Twice-Differentiable Constrained NLPs - I Theoretical Advances. Comput. Chem. Eng.,
22(9):1137–1158.
[Brian, 1997] Brian, E. H. (1997). Beej’s guide to Unix interprocess communication.
[Byrne and Bogle, 1999] Byrne, R. P. and Bogle, I. D. L. (1999). Global optimisation of constrained non-convex programs
using reformulation and interval analysis. Computers and Chemical Engineering, 23:1341–1350.
[Dixon et al., 1975] Dixon, L. C. W., Gomulka, J., and Szega, G. P. (1975). Towards Global Optimisation. Number 29-54.
North-Holland, Amsterdam. camel back function.
[Falk and Soland, 1969] Falk, J. E. and Soland, R. M. (1969). An Algorithm for Separable Nonconvex Programming
Problems. Management Science, 15(9):550–569.
[Forum, 1997] Forum, M. P. I. (1997). MPI-2: Extensions to the Message-Passing Interface. Technical report, University
of Tennessee, Knoxville, TN.
[Gatzke et al., 2002a] Gatzke, E. P., Tolsma, J. E., and Barton, P. I. (2002a). Construction of Convex Function Relaxations
Using Automated Code Generation Techniques. Optimization and Engineering, 3(3):305–326.
[Gatzke et al., 2002b] Gatzke, E. P., Tolsma, J. E., and Barton, P. I. (2002b). Construction of Convex Function Relaxations
Using Automated Code Generation Techniques. Optimization and Engineering, 3(3):305–326.
[Gatzke and Voit, 2004] Gatzke, E. P. and Voit, E. O. (2004). Modeling of Metabolic Systems Using Global Optimization
Methods. In IFAC ADCHEM (Advanced Control of Chemical Processes) Conference, Hong Kong.
[Horst and Tuy, 1993] Horst, R. and Tuy, H. (1993). Global Optimization: Deterministic Approaches. Springer-Verlag,
Berlin, second edition.
[I. B. M. , 1997] I. B. M. (1997). IBM Optimization Solutions and Library Linear Programming Solutions. Technical
report, I. B. M.
[ILOG, 2002] ILOG (2002). ILOG CPLEX 8.1: User’s Manual. Mountain View, CA.
13

[Liebman et al., 1986] Liebman, J., Lasdon, L., Schrage, L., and Waren, A. (1986). Modeling and Optimization with GINO.
Palo Alto, CA.
[Manousiouthakis and Sourlas, 1992] Manousiouthakis, M. and Sourlas, D. (1992). A global optimization approach to
rationally constrained rational programming. Chem. Engng. Commun., 115:127–147.
[McCormick, 1976] McCormick, G. P. (1976). Computability of Global Solutions to Factorable Nonconvex Programs: Part
I - Convex Underestimating Problems. Mathematical Programming, 10:147–175.
[Moore, 1979] Moore, R. E. (1979). Methods and Applications of Interval Analysis. SIAM, Philadelphia.
[Polisetty and Gatzke, 2003] Polisetty, P. K. and Gatzke, E. P. (2003). Parallel Contraction of Variable Space for Global
Solution of NLPs. In FOCAPD, Fundamentals of Computer Aided Process Design, Princeton, NJ.
[Quesada and Grossmann, 1993] Quesada, I. and Grossmann, I. E. (1993). Global optimization algorithm for heat exchanger
networks. Industrial and Engineering Chemistry Research, 32:487–499.
[Ryoo and Sahinidis, 1995] Ryoo, H. S. and Sahinidis, N. V. (1995). Global Optimization of Nonconvex NLPS and MINLPs
with Application to Process Design. Comput. Chem. Eng., 19(5):551–566.
[Smith, 1996] Smith, E. M. B. (1996). On the Optimal Design of Continuous Processes. PhD thesis, Imperial College,
London.
[Tawarmalani and Sahinidis, 2000] Tawarmalani, M. and Sahinidis, N. V. (2000). Global Optimization of Mixed Integer
Nonlinear Programs: A Theoretical and Computational Study. Technical report, University of Illinois.
[Tawarmalani and Sahinidis, 2002] Tawarmalani, M. and Sahinidis, N. V. (2002). Global Optimization of Mixed-Integer
Nonlinear Programs: A Theoretical and Computational Study. Mathematical Programming.
[Tyler and Morari, 1999] Tyler, M. L. and Morari, M. (1999). Propositional Logic in Control and Monitoring Problems.
Automatica, 35:565–582.
14

w
w = xc
Nonconvex Function
Secant Under Estimate
Two LinearizationsTwo Linearizationsfor Each Region
If b1 = 1
If b2 = 1
x
w w
xx
(a) (b)
(c) (d)
Secant Under Estimate
x
xl s1 x
u
Feasible Space
w
Figure 1: (a) Original nonlinear nonconvex constraint w = xc. (b) Relaxation of w = xc using the secant under estimate. (c)Two outer approximation constraints over estimating the nonlinear expression resulting in linear constraints. (d) Two outerapproximation constraints and a secant under estimate constraint for each region in the MILP-based piecewise relaxationproblem.
15

−1 0 1−101
−8
−6
−4
−2
0
2
4
x1
x2
Obj
. Fun
c. V
alue
−1 0 1−101
−2
−1
0
1
2
3
4
x1
x2
Obj
. Fun
c. V
alue
−1 0 1−101
−2
−1
0
1
2
3
x1
x2
Obj
. Fun
c. v
alue
−1 0 1−101
−8
−6
−4
−2
0
2
4
x1
x2
Obj
. Fun
c. V
alue
(a) (b)
(c) (d)
Figure 2: (a) The objective function surface, MILP-based relaxation surface, and the LP-based relaxation surface for 6 Humpcamel back problem. (b) The objective function surface. (c) MILP-based relaxation surface generated with 4 regions. (d)LP-based relaxation surface.
16

Nonconvex function,
Convex Relaxation of
�������
�����
MILP-based Relaxation
Local Upper Bound
Lower Bound for Partition using LP-Based Relaxation
New Lower Bounds using LP-Based Relaxation
Lower Bound for Partition using MILP-Based Relaxation
New Lower Bounds using MILP-Based Relaxation
New Upper Bound
Before Partitioning After Partitioning
Figure 3: A single branch-and-bound step for a nonconvex function of a continuous variable using LP-based relaxation andMILP-based relaxation.
17

Nonconvex function,
Convex relaxation of
LP based relaxationwith 3 linearizations
Upper bound cut
xL
xL
xU
xU
� �����
� �����
MILP based relaxation
xL
xU
Original bounds
New boundsbased on LP
New boundsbased on MILP
Feasible space for MILP-based bound
contraction problems
Figure 4: MILP-based bound contraction showing the new bounds resulted from the use of the convex relaxation andnonconvex MILP-based relaxation.
18

∗
Nonconvex problem P1
MILP-based relaxation problem P4
Upper bound cutPoint p
∗
MILP-based bound contraction problem P5
Perturbed original problem P1
Perturbed MILP-based relaxation problem P4
Figure 5: Graphical Interpretation of Theorem 1.
19

0 1 2 3 4 5−8
−7
−6
−5
−4
−3
−2
−1
0
1
−1.0316 Upper Bound
Number of Iterations of MILP−based Optimization Bound Contraction
LP−b
ased
Low
er B
ound
1 piecewise region2 piecewise regions4 piecewise regions8 piecewise regions
Figure 6: LP-based lower bounds for multiple iterations of MILP-based Bound Contraction with varying partitions for 6Hump camel back problem shown in Equation 8.
20

0 1 2 3 4 54000
4500
5000
5500
6000
6500
7000
7500
8000
7049.249 UpperBound
Number of Iterations of MILP−based Optimization Bound Contraction
LP−b
ased
Low
er B
ound
1 piecewsie region2 piecewise regions4 piecewise regions8 piecewise regions
Figure 7: LP-based lower bounds after multiple iterations of MILP-based Bound Contraction method with varying numberof partitions for Heat Exchanger Network Design Problem shown in Equation 10.
21

0 1 2 3 4 5−0.9
−0.8
−0.7
−0.6
−0.5
−0.4
−0.3−0.388812 Upper Bound
Number of Iterations of MILP−based Optimization Bound Contraction
LP−b
ased
Low
er B
ound
1 piecewise region2 piecewise regions4 piecewise regions8 piecewise regions
Figure 8: LP-based lower bounds after multiple iterations of MILP-based Bound Contraction method with varying numberof partitions for Reactor Network Design Problem shown in Equation 11.
22

Manager 1
Manager 2
worker 1
worker 2 worker 3
worker 2n
Problem Sent using FIFO
Broadcasts the original variable bounds to workers
workers return new variable bounds
Results File
MPI Environment
Figure 9: Parallel MILP-based Bound Contraction Technique using 2 Manager / Worker paradigm.
23

Table 1: Total time required in performing multiple iterations of MILP-based Bound Contraction with varying partitions for both serialand parallel implementation on Heat Exchanger Network Design Problem.
Number of Iterations of MILP-based Bound ContractionsNo of Regions 1 2 3 4 5
Serial Parallel Serial Parallel Serial Parallel Serial Parallel Serial Parallel1 0.108 0.068 0.251 0.096 0.323 0.143 0.429 0.150 0.538 0.1782 0.349 0.090 0.579 0.115 0.826 0.199 1.070 0.228 1.312 0.2774 0.800 0.198 1.979 0.351 3.157 0.579 4.448 0.785 5.431 0.944
Table 2: Total time required in performing multiple iterations of MILP-based Bound Contraction with varying partitions for both serialand parallel implementation on Reactor Network Design Problem.
Number of Iterations of MILP-based Bound ContractionsNo of Regions 1 2 3 4 5
Serial Parallel Serial Parallel Serial Parallel Serial Parallel Serial Parallel1 0.408 0.038 0.523 0.069 0.729 0.11 0.882 0.146 1.037 0.1732 0.757 0.158 1.313 0.303 1.903 0.474 2.508 0.594 3.549 0.7184 5.011 2.393 11.821 4.620 19.495 7.167 27.344 10.477 34.263 13.380
24

List of Figures
1 (a) Original nonlinear nonconvex constraint w = xc. (b) Relaxation of w = xc using the secant under
estimate. (c) Two outer approximation constraints over estimating the nonlinear expression resulting in
linear constraints. (d) Two outer approximation constraints and a secant under estimate constraint for each
region in the MILP-based piecewise relaxation problem. . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2 (a) The objective function surface, MILP-based relaxation surface, and the LP-based relaxation surface for 6
Hump camel back problem. (b) The objective function surface. (c) MILP-based relaxation surface generated
with 4 regions. (d) LP-based relaxation surface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 A single branch-and-bound step for a nonconvex function of a continuous variable using LP-based relaxation
and MILP-based relaxation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4 MILP-based bound contraction showing the new bounds resulted from the use of the convex relaxation and
nonconvex MILP-based relaxation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
5 Graphical Interpretation of Theorem 1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6 LP-based lower bounds for multiple iterations of MILP-based Bound Contraction with varying partitions for
6 Hump camel back problem shown in Equation 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
7 LP-based lower bounds after multiple iterations of MILP-based Bound Contraction method with varying
number of partitions for Heat Exchanger Network Design Problem shown in Equation 10. . . . . . . . . . . 21
8 LP-based lower bounds after multiple iterations of MILP-based Bound Contraction method with varying
number of partitions for Reactor Network Design Problem shown in Equation 11. . . . . . . . . . . . . . . 22
9 Parallel MILP-based Bound Contraction Technique using 2 Manager / Worker paradigm. . . . . . . . . . . 23
List of Tables
1 Total time required in performing multiple iterations of MILP-based Bound Contraction with varying partitions for both
serial and parallel implementation on Heat Exchanger Network Design Problem. . . . . . . . . . . . . . . . . . . . 24
2 Total time required in performing multiple iterations of MILP-based Bound Contraction with varying partitions for both
serial and parallel implementation on Reactor Network Design Problem. . . . . . . . . . . . . . . . . . . . . . . . 24
25