Embed Size (px)
Citation preview

PO
LIPO
LI
di
di M
IM
Itecn
ico
tecn
ico
lano
lano
PROCEDURES FOR ENABLING THE SIMULATION OF MANEUVERS
WITH COMPREHENSIVE CODES
Carlo L. Bottasso, Alessandro Croce, Domenico Leonello
Politecnico di MilanoItaly
31st European Rotorcraft ForumFirenze, Italy, 13-15 September 2005
PROCEDURES FOR ENABLING THE SIMULATION OF MANEUVERS
WITH COMPREHENSIVE CODES
Carlo L. Bottasso, Alessandro Croce, Domenico Leonello
Politecnico di MilanoItaly
31st European Rotorcraft ForumFirenze, Italy, 13-15 September 2005

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
• Limiting factorsLimiting factors (maximum loads, vibrations, noise, etc.) are experienced during maneuvering flightmaneuvering flight and at flight envelope boundaries.
• It is virtually impossible to guess the controlsimpossible to guess the controls that will fly a complexcomplex maneuver of long durationlong duration, guaranteeing to stay within the flight envelope boundarieswithin the flight envelope boundaries.
Maneuvering Multibody DynamicsManeuvering Multibody Dynamics
TDP
ExampleExample: Cat-A continued take-off.
Cat-A certification requirements: 1) achieve positive rate of climb; 2) achieve VTOSS; 3) clear obstacle of given height; 4) bring rotor speed back to nominal at end of maneuver, etc.
Many related problemsMany related problems:
Fixed wing (Frezza), motorcycles (Da Lio, Ambrósio), cars (Minen), sail boats, etc.

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
OutlineOutline
• Overview: the Multi-Model Steering Algorithm (MMSAMMSA) for Maneuvering Multibody Dynamics (MMBDMMBD);
• Detailed description of the methodology:
– Neural-augmented adaptive reduced modeladaptive reduced model;
– Path planningPath planning (trajectory optimization);
– Path trackingPath tracking (receding horizon model predictive control);
– SteeringSteering of comprehensive vehicle models;
• Numerical examples;
• Conclusions.

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Maneuver DefinitionManeuver DefinitionManeuversManeuvers can be formulated as Optimal Control (OC) Optimal Control (OC) problemsproblems whose ingredients are:
• A cost functioncost function (index of performance);
• ConstraintsConstraints:
– Vehicle equations of motion;
– Physical limitations (limited control authority, flight envelope boundaries, etc.);
– Procedural limitations.
SolutionSolution yields: trajectorytrajectory and controlscontrols that fly the vehicle along it.
However, the solution of optimal control problems with the solution of optimal control problems with large comprehensive models is not feasible/attractive large comprehensive models is not feasible/attractive (e.g. flexible vehicle+CFD: cost and problem size, controllability issues).
Proposed solutionProposed solution: : design a virtual pilot capable of piloting the virtual vehicle model according to the OC maneuver definition.

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Reduced modelReduced model: few dofs, captures flight mechanics solution.
Comprehensive modelComprehensive model: many dofs, captures fine scale solution details.
The Multi-Model Steering Algorithm (MMSA)
The Multi-Model Steering Algorithm (MMSA)
Sys Sys
IdId MotivationMotivation:
• Solve expensive optimal control problems with reduced model;
• Use comprehensive model only for initial value problems (known control inputs).

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
The Multi-Model Steering Algorithm (MMSA)
The Multi-Model Steering Algorithm (MMSA)
1. Maneuver planning problem (reduced model)
Reference trajectory2. Tracking
problem (reduced model)
Trajectory flown by comprehensive model
4. Reduced model update
Predictive solutions
3. Steering problem (comprehensive model)
Prediction window
Steering window
Tracking cost
Prediction error
Prediction window
Tracking cost
Steering window
Prediction error
Tracking costPrediction window
Steering window
Prediction error
5. Re-plan with updated reduced model
Updated reference trajectory
Reference trajectory
Fly the comprehensive modelcomprehensive model along the reference trajectory and, at the same time, updateupdate the reduced model (learning).

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
The Multi-Model Steering Algorithm (MMSA)
The Multi-Model Steering Algorithm (MMSA)
HighlightsHighlights:
• Computationally feasibleComputationally feasible: reduced model for expensive BVP, comprehensive model for IVP;
• Applicable to any comprehensive codeany comprehensive code without the need for modifications;
• MPC can deal with inputinput (limited authority) and outputoutput (flight envelope boundary, procedures, etc.) constraintsconstraints;
• MPC is based on non-linearnon-linear flight mechanics (reduced) models;
• MPC is provably stableprovably stable under reasonable conditions;
• Applicable to unstable vehiclesunstable vehicles;
• Adaptivity of reduced model ensures convergenceconvergence, i.e. small tracking errors.

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
GoalGoal:
• Develop reduced modelreduced model capable of predicting the behavior predicting the behavior of the plantof the plant with minimum error (same outputs when subjected to same inputs);
• Reduced model must be self-adaptiveself-adaptive (capable of learning) to adjust to varying flying conditions.
Reduced model will be used for model-predictive planning & model-predictive planning & trackingtracking.
Predictive solutions
Prediction (tracking) window
Steering window
Prediction Prediction error to be error to be minimizedminimized
Reduced Model IdentificationReduced Model Identification

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Reduced Model IdentificationReduced Model Identification
Comprehensive (multibody based) governing equations:
where are the states, the controls, the Lagrange multipliers.
• Define outputs that capture the vehicle flight capture the vehicle flight mechanicsmechanics:
• Find reduced parametricreduced parametric flight mechanics model
such that when
i.e.
the flight mechanics reduced model captures the captures the gross motiongross motion of the comprehensive one (plant).
euex e
ey = eh(ex):
ef ( _ex; ex; e; eu) = 0;
ec( _ex; ex) = 0;
f ( _y;y;u;p) = 0;
ey
ey ¼y eu = u,

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Reduced ModelReduced Model
Reduced flight mechanics model:
- Reference modelReference model:
two-dimensional rigid body model with rotor aerodynamics based on blade element theory with uniform inflow.
= CG position vector, CG velocity, pitch angle, pitch rate, rotor angular velocity;
= main & tail rotor collective, lateral & longitudinal cyclics, available power.
- Augmented reduced modelAugmented reduced model:
where is the unknownunknown reference model defectdefect that ensures
when
f ref( _y;y;u) = 0;
d
ey ¼y
y
u
f ref( _y;y;u) = d(y(n); : : : ;y;u);
eu = u.

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Reduced Model IdentificationReduced Model IdentificationApproximate with single-hidden-layer neural networkssingle-hidden-layer neural networks, one for each component:
where
and
= reconstruction error (universal approximator, );
= matrices of synaptic weights and biases;
= sigmoid activation functions;
= network input.
The reduced model parametersreduced model parameters are readily identified with the synaptic weights and biases of the networks:
di (y(n); : : : ;y;u) = diN N (y(n); : : : ; ;u) +"i ;
d
W i ;V i ;ai ;bi
¾(Á) = (¾(Á1); : : : ;¾(ÁN n))T
x = (y(n)T ; : : : ;yT ;uT )T
p = (::: ;pi T ; : : :)T ; pi = (::: ;W ij k;V i
j k;aij k;bi
j k; : : :)T :
p
"i j"i j · C; 8C > 0
diN N (y(n); : : : ;y;u) = W i T ¾(V i T x +ai ) +bi ;

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Reduced Model IdentificationReduced Model Identification
pik+1 = pi
k +¢ pik;
MinimizeMinimize functional reconstruction error (sole function of network parameters ):
Steepest descentSteepest descent corrections:
= learning rate.
p
´
¢ pik = ¡ ´
@E i (T trackk )
@pik
;
E i (Tadaptk ) = (f i
ref(_ey¤
h; ey¤h;u¤
h) ¡ diN N (ey¤(n)
h ; : : : ; ey¤h;u¤
h))2¯¯T adapt
k

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
RemarkRemark: tracking and steering grids are different.
= coarsecoarse grid, captures flight mechanics scalesflight mechanics scales;
= finefine grid, captures aeroelastic scalesaeroelastic scales.
T trackh
T steerh
Reduced Model IdentificationReduced Model Identification
1.1. FilterFilter aeroelastic solution ;
2.2. ProjectProject filter outputs onto adaption grid:
3.3. Compute derivativesCompute derivatives based on interpolationinterpolation of filtered and projected outputs.
F (ey¤h)
ey¤h
ey¤hjT adapt
h= P ¡ 1(F (ey¤
hjT steerh
));
ey¤(n)h

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Reduced Model IdentificationReduced Model IdentificationEffect of system identificationsystem identification by model defect adaptionmodel defect adaption:
Output of multibody, reference, and neural-augmented reference with same prescribed inputs .u
Short Short transient = transient =
fast adaptionfast adaption

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Maneuver optimal control problemManeuver optimal control problem: solution yields reference to-be-tracked trajectory .
Optimize performance index
Subjected to:
• Reduced model equations:
• Boundary conditions: (initial)
(final)
• Constraints:
RemarkRemark: cost function, constraints and bounds collectively define in a compact and mathematically clear way a maneuver.
Trajectory Planning Trajectory Planning
Ã(y(T0)) 2 [Ã0min;Ã0max
];Ã(y(T)) 2 [ÃTmin
;ÃTmax];
J plan = Á(y;u)¯¯T
+Z T
T0
L(y;u) dt;
f ( _y;y;u;p¤) = 0;
gplan(y;u;T) 2 [gplanmin ;gplan
max ]:
Trajectory to be followed by tracking problem
y¤

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Model-predictive tracking problemModel-predictive tracking problem: solution yields steering controls .
Minimize cost
Subjected to:
• Reduced model equations:
• Initial conditions:
• Constraints:
RemarkRemark: formally identical to the planning problem, the two can be solved using the same softwaresame software.
Trajectory Tracking Trajectory Tracking
f ( _y;y;u;p¤) = 0;
y(T track0 ) = ey0;
gtrack(y;u;T) 2 [gtrackmin ;gtrack
max ]:
Tracking window
Steering window
Tracking cost
Tracking trajectory from planning problem
u¤
J trackh =
Z T t rack
T t rack0
(jjyh ¡ y¤hjjS t rack
y+jj _uhjjS t rack
_u) dt;

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
March forward in timeMarch forward in time multibody solver with given control given control inputsinputs as computed by the tracking problem:
• Project controlsProject controls from tracking grid to steering grid :
• Solve initial value probleminitial value problem from current state on steering window:
Steering ProblemSteering Problem
Steering window
u¤
ef ( _exh; exh; eh;u¤
h) = 0;
ec( _exh; exh) = 0;
ex(Tsteer0 ) = ex0:
ex0
u¤hjT steer
h= P (u¤
hjT t rackh
):
T trackh T steer
h
Current state (tracking initial condition)
ex0

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
RequirementsRequirements:• Achieve positive rate of climb;• Achieve VTOSS; • Clear obstacle of given height;• Bring rotor speed back to nominal.
Cat-A Continued TOCat-A Continued TO
Normal take-off
Continued take-off
Rejected take-off
Take-off decisionpoint

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Lower pairs:
• Sensors;
• Actuators, controls.
Other models:
• Flexible joints;
• Unilateral contacts;
Non-linearly stable energy-energy-preserving-decayingpreserving-decaying scheme.
Body models: geometrically exact, composite ready beams and shells; rigid bodies.
Rotorcraft Aeroelastic ModelsRotorcraft Aeroelastic ModelsFinite element based MB codeFinite element based MB code (Bauchau & Bottasso 2001).

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Cost functionCost function:
where T1 is unknown internal event (minimum altitude) and T unknown maneuver duration.
ConstraintsConstraints:
- Control bounds
- Initial conditions obtained by forward integration for 1 sec from hover to account for pilot reaction (free fall)
Cat-A Continued TOCat-A Continued TO
J plan = ¡ Z(T0) +wT (T ¡ T1) +w1
T ¡ T0
Z T
T0
_B21 dt;

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Constraints (continued)Constraints (continued):
- Internal conditions
- Final conditions
- Power limitations
For (pilot reaction):
where: maximum one-engine power in emergency;
one-engine power in hover;
, engine time constants.
For :
Cat-A Continued TOCat-A Continued TO

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
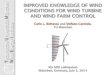
Flap, lag, andpitch hinges
Blade
Hub
Shaft
FuselageHorizontallifting surface
Rigid body
Beam
Revolute joint
Planar joint constrainingmotion to a vertical plane
A:
B: i
Cat-A Continued TOCat-A Continued TO
Multibody model (one single blade shown, for clarity)

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Cat-A Continued TOCat-A Continued TO

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Cat-A Continued TOCat-A Continued TO
(Legend: comprehensive model, flight mechanics model)

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Cat-A Continued TOCat-A Continued TO
Effect of re-planning iterations:
(Solid line: comprehensive model)

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Cat-A Continued TOCat-A Continued TO
Effect of re-planning iterations:
(Solid line: comprehensive model)

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
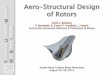
Cat-A Continued TOCat-A Continued TO
(Legend: comprehensive model, flight mechanics model)
MPC every 1 sec. MPC every 0.2 sec.
Effect of MPC activation frequency:

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Optimal Control ProblemOptimal Control Problem (with unknown internal event at T1)
• Cost function:
• Constraints and bounds:
- Initial trimmed conditions at 30 m/s
- Power limitations
Minimum Time Obstacle AvoidanceMinimum Time Obstacle Avoidance

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Minimum Time Obstacle AvoidanceMinimum Time Obstacle Avoidance

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Minimum Time Obstacle AvoidanceMinimum Time Obstacle Avoidance
(Legend: comprehensive model, flight mechanics model)
Trajectories at 1st iteration
Trajectories at 4th iteration
Effect of reduced model adaption:

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
Minimum Time Obstacle AvoidanceMinimum Time Obstacle Avoidance
(Legend: comprehensive model, flight mechanics model)
Pitch vs. time at 1st iteration
Pitch vs. time at 4th iteration
Effect of reduced model adaption:

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
ConclusionsConclusions
• Computational procedures for maneuvering maneuvering comprehensive flying modelscomprehensive flying models were proposed, that blend aeroelasticity with flight mechanics;
• Multi-model approach allows reasonable computational reasonable computational costscosts even for very large aeroelastic models;
• No modificationsNo modifications to comprehensive codes are necessary in order to analyze maneuvering flight conditions;
• Basic idea applicable also to the steeringsteering of other vehicle models, e.g. automobilesautomobiles and motorcyclesmotorcycles;
• Receding horizon formulation of MMSA allows for the analysis of unstable systemsunstable systems, such as helicopters;
• MMSA can deal with inputinput and output constraintsoutput constraints.

Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
Man
eu
veri
ng
Roto
rcra
ft D
yn
am
ics
POLITECNICO di MILANO
AcknowledgementsAcknowledgements
• This work is supported in part by the US Army Research US Army Research OfficeOffice, through contract no. 99010 with the Georgia Institute of Technology, and a sub-contract with the Politecnico di Milano (Dr. Gary Anderson, technical monitor).
• Domenico Leonello is supported by a fellowship of Agusta-Agusta-WestlandWestland.