Embed Size (px)
Citation preview

Precision and accuracy of acoustic gunshot locationin an urban environment
Robert B Calhoun1 a) Clark Dunson1 Murphey L Johnson1 Scott R Lamkin1 William R Lewis1 Robert LShowen1 Mark A Sompel1 and Lester P Wollman1
ShotSpotter Inc Newark CA 94560 USA
The muzzle blast caused by the discharge of a firearm generates a loud impulsive soundthat propagates away from the shooter in all directions The location of the source can becomputed from time-of-arrival measurements of the muzzle blast on multiple acoustic sensorsat known locations a technique known as multilateration The multilateration problem isconsiderably simplified by assuming straight-line propagation in a homogeneous medium amodel for which there are multiple published solutions Live-fire tests of the ShotSpottergunshot location system in Pittsburgh PA were analyzed off-line under several algorithmsand geometric constraints to evaluate the accuracy of acoustic multilateration in a forensiccontext Best results were obtained using the algorithm due to Mathias Leonari and Galatiunder a two-dimensional geometric constraint Multilateration on random subsets of theparticipating sensor array show that 96 of shots can be located to an accuracy of 15 m orbetter when six or more sensors participate in the solution
ccopy2020 ShotSpotter Inc [httpdxdoiorg(DOI number)]
[XYZ] Pages 1ndash18
PACS numbers 4360Jn 4328-g 4328Bj
I INTRODUCTION
The muzzle blast resulting from discharge of afirearm generates a loud impulsive noise that propagatesaway from the shooter in all directions The location ofthe shooter can be estimated by minimizing the differ-ence between the measured and predicted arrival time ofthe muzzle blast on multiple time-synchronized sensorsa technique known as acoustic multilateration Publicsafety agencies use networks of acoustic sensors to locateillegal gunfire in near real-time 10ndash15 seconds after dis-charge (Aguilar 2015 Lawrence et al 2018 NationalLaw Enforcement and Corrections Technology Center2007 Watkins et al 2002)
Acoustic data are also used in forensic context (Beck2019 Begault et al 2019 Brustad and Freytag 2005Maher and Hoerr 2018 Maher and Routh 2015) Acous-tic multilateration cannot identify a shooter but it canestablish the discharge location and discharge time foreach individual shot fired in a repeatable and objectivemanner The efficacy and accuracy of an acoustic mul-tilateration system depends on the number and positionof reporting sensors the accuracy to which the initial ar-rival time can be measured and the validity of the prop-agation model with the simplest acoustic propagationmodel assuming straight-line propagation The presentwork outlines a procedure for computing shot locationsfrom acoustic measurements of the muzzle blast using
a)rcalhounshotspottercom
acoustic multilateration and quantifies the precision andaccuracy of the results obtained using data collected un-der controlled but realistic conditions
The data derive from a series of live fire tests of theShotSpotter gunshot location system conducted in Pitts-burgh PA These tests were analyzed offline to identifythe combination of algorithm and geometric constraintthat offers the greatest precision when locating gunshotsin a forensic context Pittsburgh was selected as a studyarea for a number of reasons first a large number of testswere conducted (three firearms discharged from nine fir-ing positions) covering neighborhoods with a density ofstructures similar to that of many ShotSpotter coverageareas second the hilly terrain offered the opportunityto investigate the importance of locating in three dimen-sions and finally because the Pittsburgh array featuresan unusually high sensor density allowing for simulationof the effects of deployed sensor density on detection ratesand location accuracy
Source data from the Pittsburgh tests comparableto what is submitted as evidence in a criminal trial areprovided as supplemental materials These materialscomprise time-stamped acoustic recordings time- andlocation-stamped output of the pulse processing algo-rithms and tagged pulse sets suitable for acoustic mul-tilateration These data permit other investigators toreview or extend the current work
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 1
II THEORY OF GUNSHOT LOCATION
A Source signal
The muzzle blast of a gunshot is an impulsive acous-tic source that emits power over a broad range of frequen-cies (Weber 1939) developed an expression for the pres-sure of spark explosions that has applicability to muzzleblasts the resulting expression is similar to that intro-duced by (Friedlander 1946) The single parameter ofthe Weber model is the Weber radius rw the radius atwhich the supersonic combustion products decelerate tosonic velocity Unlike explosions muzzle blasts are highlydirectional (Beck et al 2011 Maher and Shaw 2010) butthey can be modeled as a Weber source in which the sizeof rw depends on the angle between the gun barrel andthe receiver (Hirsch and Bertels 2013)
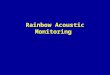
Muzzle blasts are simple impulses (Maher 2009) andrecordings made in open environments (such as KrugerNational Park in South Africa Figure 1 top) show rea-sonable agreement with simple models (Don and Cra-mond 1987 Embleton 1996) In built-up areas propa-gation distances are shorter and the received waveformsare more complicated (Figure 1 bottom) (Hornikx2016) notes that ldquosound pressure levels in urban areasdepend at one hand on the actual sound sources and atthe other hand on the propagation of sound from thesesources in the environmentrdquo a statement that is particu-larly applicable to urban gunshots where a simple sourcesignal becomes a complicated received signal as a resultof the environment In urban environments the acousticenergy of the muzzle blast is transferred from source toa receiver via many different paths including specularand diffuse reflection (echoes and reverberation) diffrac-tion (transmission around structures) refraction (bend-ing due to speed-of-sound gradient) as attenuated byabsorption in the atmosphere and at surfaces (Kapra-los et al 2008) It is possible to model acoustic propa-gation in an urban environment using ray-tracing andother computational modeling techniques (Albert andLiu 2010 Le Bot and Bocquillet 2000 Mehra et al2014 Parker et al 2007 Pasareanu et al 2018 Remil-lieux et al 2012 Stevens and Murphy 2014) but thesemodels require a structural model of the area and are insome cases computationally demanding
A simpler approach (Showen 1997 Showen et al2008) is to deploy more than the minimum number of sen-sors required for multilateration and assume a sufficientnumber of sensors will receive detectable levels of muzzleblast energy via paths well-approximated by a straight-line propagation model These ldquonear line-of-sightrdquo pulsescan be identified by constructing sets of pulses from ap-propriate sensors computing a prospective location fromthe pulse set and comparing arrival time predictions ofthe model with the measured arrival time on each sensorThe goal of this combinatorial optimization problem is tofind the largest set of pulses that meet a mutual consis-tency test Specular reflections (echoes) are rejected be-cause the path between source and each sensor is distinctresulting in different echo patterns in each received sig-
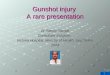
nal only pulses from ldquonear line-of-sightrdquo paths pass themutual consistency test This principle is illustrated inFigure 2 which shows the envelopes of three successiveshots detected on five different sensors Strong echoesare detected on three of the sensors but only the initialimpulse from each shot is consistent with a straight-linepropagation model on all the fives sensors The mutualconsistency method can only be used when the number ofreporting sensors exceeds the minimum number of timedifferences of arrival (TDoAs) required for multilatera-tion The method works best when the sensor density ishigh enough to ensure gunshots are detected on at leasttwo more sensors than required for multilateration butnot so high that the system generates false triggers onunwanted sources of impulsive noise such as constructionnoise
05
-05
00
473 m
05
-05
00
time s020 002 004 006 008 01 012 014 016 018
443 m
FIG 1 Firearms discharged at similar ranges in an open
environment (top Kruger National Park South Africa) and
in an urban environment (bottom city in the midwestern
United States) the vertical scale is with respect to ADC full
scale of 93 dB SPL = 10
B Pulse localization
In built environments the acoustic energy from amuzzle blast arrives via multiple paths Energy transmit-ted via the shortest acoustic path arrives first additionalenergy from the blast is delivered via reflections and otherindirect paths over a period of time that may extend toseveral seconds In the present work signal refers to theacoustic pressure change induced by the muzzle blast asmeasured by a remote microphone as a function of timethe goal of the pulse detection algorithm is to identifythe arrival time of pulsesmdashfast rise time portions of themeasured signalmdashthat are plausibly due to muzzle blastenergy arriving via the shortest acoustic path Becauseshortest acoustic paths are often not line-of-sight pathssignificant attenuation may occur and the acceptance cri-teria for muzzle blast impulses must necessarily be broad
One effective strategy for detecting plausible muzzleblasts in built environments is to convolve the envelopeof an acoustic signal with a step-detection kernel Thisacknowledges that muzzle blast power will be broadlydistributed in the time domain while giving the mostweight to the earliest-arriving signal
2 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
10
00
05
79 m
10
00
05
223 m
10
00
05
350 m
10
00
05
474 m
10
00
05
time s2000 02 04 06 08 10 12 14 16 18
775 m
FIG 2 Waveform envelopes for a sequence of 3 rounds from
a 9mm pistol as recorded by sensors at 79 m 223 m 350 m
474 m and 775 m showing that range alone is not a good pre-
dictor of signal strength Echo patterns vary from location to
location allowing the near line-of-sight paths to be identified
through their greater self-consistency The signals have been
aligned in the time domain the vertical scale is the same for
all plots with amplitude of 10 corresponding to ADC full
scale of 93 dB SPL
Let f(t) be the amplitude of an acoustic signal asa function of time t The instantaneous magnitude (orenvelope) of f(t) is given by the magnitude of the analyticassociate of f(t)
f = f(t) + iH(f(t))
whereH(f(t)) is the Hilbert transform of f(t) (Boashash2015) Define a weighted step-detection kernel g(t) as
g(t) =
tτ + 1 for minus τ lt t le 0
minus12 for 0 lt t le τ0 otherwise
(1)
where τ is a length scale over which the signal should beaveraged
Define x(t) as the convolution the signal envelopef(t) and kernel g(t)
x(t) = (f lowast g)(t) (2)
The pulse arrival time is defined as the time t at whichx(t) is locally maximized Pulses with values of x(t) thatfall below a threshold are discarded
The kernel g gives as much weight to the absence ofsignal prior to pulse arrival as it does to the amplitude ofthe signal that follows this provides consistent estimatesof the arrival time of the most direct (earliest-arriving)path even when the energy received via that path is asmall fraction of the total Increasing the length scale τreduces spurious triggering on echoes and reverberationbut an excessively long window reduces the ability to de-tect closely-spaced shots Empirically a value of 50 mshas been found to work well on both isolated shots andthe range of semi-automatic (300 rpm) and fully auto-matic (450ndash950 rpm) firearms encountered in a public-safety context Note this is 10ndash20 times the duration ofa muzzle blast measured on an open range (Beck et al2011 Maher 2011 Routh and Maher 2016) which is onthe order of 2 ms
10
-10
-08
-06
-04
-02
00
02
04
06
08
time s05050495 0496 0497 0498 0499 0500 0501 0502 0503 0504
223 m
FIG 3 Pulse arrival time (red dot) plotted on the original
waveform for sensor at 223 m distance from Figure 2 Dotted
line shows output of pulse localization function x(t) from (2)
The full scale amplitude approximately 93 dB SPL
C Pulse Selection
In urban environments true line-of-sight paths arerare ldquoNear line-of-sightrdquo paths where the received sig-nal is line-of-sight after a single diffraction over a barriercan be used for location because the typical height ofbuildings is small compared with the distances betweenacoustic sensors Use of non-line of sight paths with sig-nificant time delays such as those generated by specularreflections from buildings and other hard surfaces willcause significant location error if used in a multilatera-tion calculation Associating pulses from one shot withpulses from a different shot will also result in large mul-tilateration error
The construction of sets of pulses that are appropri-ate for multilateration becomes more difficult as the num-ber of shots and number of shooters increases ShotSpot-terrsquos pulse selection algorithms use a combination of com-binatorial optimization pattern-matching and numericaloptimization methods to search for the largest possibleset of mutually-consistent pulses for each shot The se-
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 3
lection of appropriate pulses for multilateration is an in-volved topic (Beck 2019 Calhoun 2011 Showen et al2008) and a full discussion of the methods used is out-side the scope of the present work To facilitate reviewof the present multilateration results the output of theShotSpotter pulse selection routines (comprising sets ofacceptably ldquonear line of sightrdquo pulses for each shot) areprovided as part of the supplemental materials alongwith sufficient audio data to verify that the selectedpulses are associated with the shortest acoustic path1Because the search for pulse sets is not exhaustive thetuples provided are not guaranteed to be an optimal sub-set for each test However all pulses in a tuple will havean error of less than 40 ms between the measured arrivaltime and the predictions of a straight-line propagationmodel
D Source Localization
Acoustic multilateration the location of a sourcefrom multiple time difference of arrivals (TDoAs) hasbeen in use since World War I when French (Aubin andGoldstein 2014) Canadian (Finan and Hurley 1997)and British forces (Van der Kloot 2005) used sound rang-ing to locate the source of artillery fire Many multilater-ation algorithms have been documented since that timeA multilateration solution in d dimensions requires atleast n = d + 1 reporting sensors Some n = d + 1solutions have two mathematically consistent solutionsAdditional methods not discussed in the present worksuch as measurements of angle-of-arrival (AoA) or re-ceived signal power are required to resolve ambiguoussolutions so the present work focuses on solutions forwhich n ge d + 2 for which the multilateration solutionis always unique given non-degenerate sensor placement
The TDoA source location problem reduces to find-ing the point of intersection of multiple hyperboloids sothe algorithms comprise variations on a common themeShotSpotter uses multiple algorithms because they ex-hibit different numerical stability and sensitivity to thechoice of a reference sensor Below we analyze the ac-curacy of four algorithms and three constraints under avariety of array densities to compare their relative per-formance under real-world test conditions A goal of thepresent work is to identify which algorithm is best-suitedfor forensic work All solutions discussed assume line-of-sight propagation in a homogeneous stationary medium
1 Reddi
This implementation is based on (Reddi 1993)With reference sensor at (0 0 0) and other sensors at(xi yi zi) i = 1 2 3 n source location (xlowast ylowast zlowast)can be found from relative arrival times ti by equatingthe squared distance from the reference to the source withthe square distance of the reference to the other sensors
cti = Si minusradicx2 + y2 + z2 (3)
1400
m
1400 m
FIG 4 Graphical representation of the intersecting hyper-
bola approach characteristic of Reddi algorithm The refer-
ence sensor that defines the time differences of arrival is the
first reporting sensor The sample data is from test 1 at Firing
Position 4
for i = (1 2 n) where
S2i = (xminus xi)2 + (y minus yi)2 + (z minus zi)2
This reduces to a quadratic equation that can be solvedfor source location (xlowast ylowast zlowast) Discharge time tlowast is ob-tained from the mean value of ti minus Sic at (xlowast ylowast zlowast)This implementation requires a minimum of d+1 TDoAswhere d is the number of dimensions
2 MLG
(Mathias et al 2008) avoid use of a reference sen-sor by minimizing the squared error on each sensorShotSpotterrsquos ldquoMLGrdquo implementation slightly modifiesthis algorithm by solving for time-distance (ct) insteadof t which improves computational stability For thesimplified case of overdetermined systems (n gt d + 1)with receiver matrix
R =
x0 x1 xiy0 y1 yiz0 z1 ziminusct0 minusct1 minusctiminusc2 minusc2 minusc2
(4)
4 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
the solution vector is given byx
y
z
ct
vc
=1
2Rdagger
x20 + y20 + z20 minus (ct0)2
x21 + y21 + z21 minus (ct1)2
x2i + y2i + z2i minus (cti)2
(5)
where v is an error term and Rdagger is the pseudoinverse ofR See (Mathias et al 2008) for handling of the fullydetermined case (n = d+ 1) and for a quantification oferror propagation in multilateration
3 LeastSquares
The ldquoLeastSquaresrdquo implementation is another least-squares minimizer based on time difference of arrivalsbetween pairs of sensors Equating the squares of the dis-tance and the time-distance gives one equation for eachsensor i
(xi minus x)2 + (yi minus y)2 + (zi minus z)2 = (cti minus ct)2 (6)
Subtracting the ith equation from the (i+ 1)-st elimi-nates quadratic terms Define Xi to be the differencebetween the LHS (distance) and RHS (time-distance) ofthe ith difference equation When
χ2 =
nminus1sumi=1
X2i
the minimum value of χ2 is the point at which
partχ2
partx=partχ2
party=partχ2
partz=partχ2
partct= 0
This gives a linear system in d+ 1 variablesaiai aibi aici aidibiai bibi bici bidiciai cibi cici cididiai dibi dici didi
x
y
z
ct
=
aieibieicieidiei
(7)
where
ai = (xi+1 minus xi)bi = (yi+1 minus yi)ci = (zi+1 minus zi)di = minusc(ti+1 minus ti) and
ei =1
2(x2i+1 + y2i+1 + z2i+1 + c2t2i minus x2i minus y2i minus z2i minus c2t2i+1)
This requires an additional TDoA compared with theReddi and MLG implementations
4 Iterative Discharge Time
Combustion of the propellant used firearms gener-ates an optical signal known as the muzzle flash that
1400
m
1400 m
FIG 5 Graphical representation of the intersecting circle ap-
proach characteristic of Iterative Discharge Time algorithm
The sample data is from test 1 at Firing Position 4
is strongest in the medium-wave IR region (Pauli et al2004) If the discharge time tlowast is known from muzzle flashtiming (6) reduces to finding the point of intersection ofcircles (or spheres) of known radius c(ti minus tlowast) This is asimplified version of (7)
When no muzzle flash time is available the dis-charge time can be determined iteratively The ldquoIter-ative Discharge Timerdquo (IDT) implementation uses sim-plex gradient descent to find tlowast based on starting value oftlowast = t0 minus 10 where t0 is the arrival time on the nearest(earliest) sensor and the constant roughly equal to themean distance between a shooter and the first reportingsensor The main advantage over pure TDoA algorithmsis that the range can be bounded which is helpful whenlocating sources outside the sensor array An additionalbenefit of all intersecting circle solutions in a forensic con-text is that the location tuple obtained (xlowast ylowast tlowast) canreadily be checked using the standard tools of plane ge-ometry a ruler and a compass A graphical representa-tion of an intersecting circles solution is shown in Figure5
E Geometric Constraints
Acoustic multilateration can be done in two or threedimensions For two-dimensional multilateration thesensor positions are projected against a plane and themultilateration solution returned is computed in thisplane At least three TDoAs are required For three-dimensional multilateration the sensor elevation data isused without modification and the multilateration solu-tion computed in three-dimensional space Four TDoAsare required for multilateration in three dimensions
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 5
There are two potential advantages of three-dimensional multilateration First a 3D straight-linedistance propagation model can be used This is po-tentially more accurate Second the elevation of theshooter can be estimated The downside of 3D multilat-eration is that the additional degree of freedom allowedby three-dimensional multilateration can lead to less ac-curate 2D results if the sensor position matrix is poorlyconditioned eg the range of vertical elevations of re-porting sensors is small compared with the horizontalspacing between them With poorly-conditioned arrayssmall errors in the measurements of arrival time sensorposition or speed of sound may result in large changesin the shooterrsquos putative elevation
There are plausible use cases for detecting gunshotsabove ground level including locating shots fired fromthe upper floors of a structure and assisting in the classifi-cation of aerial fireworks Nevertheless the vast majorityof firearms are discharged at ground level so a practicalapproach is to do the bulk of pulse selection in two di-mensions and then refine the solution using a 3D modelwhen sufficient data are available
An approach that enables use of a 3D propagationmodel while avoiding the instability of a full 3D solutionis to constrain the shooter location to a two-dimensionalplane This ldquo25Drdquo method (Calhoun 2013) refines aninitial 2D solution by assuming the shooter is standingon the ground (or on the roof of a building) and con-structing R with a duplicate set of sensors with identicalarrival time but position reflected through the horizontalplane containing the shooter Figure 6 The method re-quires use of a digital elevation andor building modelto provide an estimate for zlowast the z-elevation of theshooter With ground plane normal to z each TDoAtuple (xi yi zi ti) in (4) is supplemented with a secondTDoA tuple (xi yi 2zlowastminuszi ti) This doubles the numberof columns in (4) and the number of rows in (5) but nochanges in algorithm are required The solution will beconstrained to elevation zlowast by the symmetry of the inputdata
F Weather Effects
Atmospheric conditions affect sound propagationand therefore the accuracy of an acoustic gunshot loca-tion system The speed of sound varies only slowly withtemperature and little with humidity or pressure so thedry air relationship for the speed of sound c may be usedwith acceptable accuracy This is
c = 2003radicT + 27315 m sminus1 (8)
where T is the temperature in CSound energy is transmitted as a compression wave
in a fluid a moving fluid carries the sound energy withit The multilateration routines of Section II D assumea stationary medium but the effects of a homogeneousmoving fluid can be incorporated by shifting the apparentposition of each sensor to account for air motion fromwhen the shot is fired to when it is detected With the
FIG 6 Method for constructing a sensor array through a
ground plane by reflection This permits use of elevation data
from the remote sensors while constraining the output to the
specified plane
z-axis component of wind vector ~v assumed to be zerothe wind-corrected position of the sensors is given by
[xprimeiyprimei
]=
[xiyi
]minus (ti minus tlowast)
[vxvy
](9)
where ti the arrival time at each sensor and vx and vyare the x- and yminuscomponents of the wind vector Thedischarge time tlowast is not known a priori but it can beestimated by subtracting an appropriate value from thearrival time at the first reporting sensor A suitable valueis the (historic) mean distance from the shooter to thefirst reporting sensor a value of 10 s is appropriate forarrays with sensor densities in the range of 2 sensorskm2
to 12 sensorskm2 The wind-correction process can berepeated with a more accurate value after initial compu-tation of discharge time tlowast
Other deleterious effects of wind are not so easilyhandled Wind increases the background noise detectedby outdoor microphones (Raspet et al 2006) an effectthat can be ameliorated but not entirely eliminated withproper windscreens (Hosier and Donavan 1979 Lin et al2014 Schomer et al 1990 Wuttke 1992) Wind noise re-duces the signal-to-noise ratio of gunshot impulses mak-ing them harder to detect Gradients in wind speed andtemperature with elevation refract the sound bendingit upwards in the upwind direction and downwards inthe downwind direction (Franke et al 1988 Wiener andKeast 1959 Wilson 2003) Upwind refraction createsa ldquoshadow zonerdquo where the gunshot signal is not de-tectable Because of the potential lack of participationfrom upwind sensors during windy conditions additionalsensors must be to deployed to enable successful mul-tilateration in all weather conditions The ShotSpottersystem does not otherwise compensate for the effects ofwind or temperature gradients
6 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
apparentposition
of sensor
wind
sensor
FIG 7 Adjustment of sensor positions to take homogeneous
fluid movement into account Energy is propagated from
source to sensor via a combination of bulk fluid flow and
acoustic propagation The effects of bulk fluid flow can be
incorporated by shifting the apparent position of the sensor
to the position that would have received the signal in the
absence of fluid flow
III SYSTEM DESIGN
A Array design
A typical deployment density is 2 sensorskm2 to12 sensorskm2 with the density dependent on the den-sity of structures and foliage in the covered area The lowend of this range is used in open areas where few struc-tures impede acoustic propagation such as anti-poachingdeployments higher sensor densities are used in areaswith a high density of structures high background noise(traffic rapid transit systems) difficult wind conditionsor unfamiliar environments Sensors are installed on el-evated locations such as rooftops and utility poles to in-crease the number of near line-of-sight audio paths andto minimize background noise Wind noise is mitigatedwith a 35 cm layer of open-cell foam around the micro-phones
B Sensor processing
All signal processing and pulse detection opera-tions are performed in the field on remotely-deployedsingle-board computers based on the Texas InstrumentsAM335x platform Sensor position is provided by a u-blox MAX 7 GPS chipset and the Linux system clockis disciplined using the PPS signal from the GPS Theu-blox MAX-7 series of GPS chipsets have a datasheetlocation accuracy of 25m (50 circular error probability(CEP)) and timepulse accuracy 30 n sec (RMS) Actualperformance depends on the satellite constellation visi-ble from the installed sensor position Because sensorsare rarely moved averaging over long periods of time isa feasible method for improving location precision Eachhour the mean position over the previous hour is storedand a long-term average position re-estimated based onvalues from up to 180 days of hourly records (Figure 8)with the multilateration calculations making use of thelong-term averages It is expected that the increasing
availability of high-accuracy real-time kinematic (RTK)GPS chipsets will reduce or eliminate the need for posi-tion averaging in future multilateration systems
frequ
ency
07
0
01
02
03
04
05
06
2D distance from centroid (m)15000 25 50 75 100 125
by hour
by minute
LTA
FIG 8 Horizontal GPS performance of a typical stationary
sensor showing the distance from the centroid of GPS mea-
surements sampled once per minute of the hourly averages
and of the long-term average of hourly values 50 CEP is
slightly worse than predicted by the datasheet but averag-
ing reduces the RMS distance from the centroid to less than
002 m
Audio sound pressure level is measured usingKingstate KECG2742WBL waterproof electret micro-phones and digitized using a Cirrus Logic WM8737analog-to-digital converter which samples 24-bit audiodata at 48 kHz Microphone sensitivity is minus42 plusmn 3 dBSPL giving a full-scale digital output of approximately93 dB SPL Network connectivity is provided by an on-board cellular data module
For performance reasons the pulse localization algo-rithm described in II B is implemented as a discrete-timealgorithm The digitized input stream is split up into2048-length chunks with 50 overlap so that a Hann win-dow can be applied without data loss After windowingdata is converted into the frequency domain for filter-ing and analysis A typical pulse localization response isshown in Figure 3
system σ (micros)
GPS timepulse 3 times 10minus2
Linux system clock 1 times 10minus3
Pulse start measurement 1 times 102
TABLE I Scale of contributions to pulse arrival time error
Pulse arrival time measurements are derived from au-dio synchronized to the GPS PPS timepulse As shownin Table I the timing errors associated with the GPSsystem are negligible compared with the uncertainty inpulse arrival time measurement The net effect of all
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 7
timing errors is estimated by running the pulse detec-tion algorithm on gunshot-like impulsive signals synchro-nized with GPS PPS This measurement takes into ac-count multiple sources of error The measured timingerror through the ShotSpotter sensors has a mean ofmicro = minus316 micros with a standard deviation of σ = 996 microswith a typical measurement shown in Figure 9 The pulsearrival time data provided and used for multilaterationin the current work are to millisecond precision
coun
ts
125
-100
20
40
60
80
100
microseconds750-1250 -1000 -800 -600 -400 -200 0 200 400 600
FIG 9 Pulse start timing measurements using simulated
gunshot impulses triggered by GPS timepulses
The audio processing code analyzes the first 250 msfollowing pulse arrival time to determine the likelihoodthat the impulse is due to a gunshot muzzle blast Mea-sured characteristics of the impulse include the integratedpower of the impulse the shape of its envelope and a nor-malized power spectrum These data are transmitted toa common endpoint for the multilateration computation
C Classification
The original 48 kHz data is discarded after pulse pro-cessing data downsampled to 12 kHz is cached on thesensor for 30 hours to support forensic analysis Follow-ing detection of a potential gunshot a 2-second subset ofdownsampled (12 kHz) FLAC-encoded audio is retrievedfrom the two closest sensors and used to build an imagemosaic (Figure 10) comprising features characteristic ofthe gunshot audio on each sensor and features character-istic of the incident as a whole A full description of imagemosaic construction is outside of the scope of the presentwork but the tiles comprising the image can be summa-rized as follows A) waveform image B) discrete waveletspectrogram of the de-noised waveform C) pulse time-of-arrival markers aligned using the shooter-sensor timedelay computed via multilateration D) discrete waveletspectrogram of the noise (complement of tile B above)E) wavelet transform of the first impulse F) waveformof the first impulse G) participating area as defined bythe Voronoi diagram of participating sensors H) locationof recent nearby incidents I) plots of various per-sensorparameters as a function of distance J) version-tracking
code K) time-of-date counters L) individual shot loca-tions M) power spectrum N O P) pulse feature coun-ters Q R) recent incident counters S) logo Discretewavelet transforms are performed using the biorthogonal22 wavelet and scaling functions
Classification of the mosaic images is performed us-ing the ResNet (He et al 2016) image classifier trainedusing field-collected data labelled by human reviewersEach mosaic image (one from the nearest sensor and onefrom the second-nearest) is classified independently theoutputs of the two classifiers are combined to minimizethe likelihood of false negatives In the vast majority ofcases ldquoground truthrdquo (eg shell casings video record-ings) is not available and it is to be expected that sometraining data are misidentified
A
BCDE
F G H I
J K L M N O P Q R S
FIG 10 The top image shows a typical mosaic image used for
machine classification with ResNet image classifier This ex-
ample is from a 9 mm firearm discharged at Firing Position 8
Each image used for classification is comprised of 19 individ-
ual tiles some tiles are derived from a 2-second subset of 12
kHz audio while others are derived from the characteristics
of the incident as a whole See text for tile descriptions
8 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Incidents classified as gunfire are pushed to the pub-lic safety agencyrsquos dispatch system andor mobile de-vices All of the pulse data associated with an inci-dent is stored in a database so that the measurementsmade by the remote sensor are available for later anal-ysis If a forensic report is requested (typically in thecourse of a criminal investigation) within 24 hours eightseconds of 12 kHz downsampled audio may be retrievedfrom sensors participating in the incident The down-sampled audio is invaluable for verifying that the pulseselection algorithms have grouped the input pulse datainto appropriate subsets for multilateration
D Weather Measurements
Reliable temperature data with a precision of plusmn1 Care available via NWS METAR readings from major air-ports measurements from Pittsburgh International Air-port (KPIT) and Allegheny County Airport (KAGC)were used in the present work Wind is highly depen-dent on local conditions and sensor mounting elevationso the airport values can provide only a rough estimateof local conditions but both airports reported negligiblewind of 0 m sminus1 to 5 m sminus1 during the live fire test so theeffects of wind were not investigated
IV DESCRIPTION OF LIVE FIRE TESTS
ShotSpotter sensor arrays are routinely tested priorto active use by law enforcement The live fire test ofthe ShotSpotter system examined here was conducted inPittsburgh PA by the Pittsburgh Bureau of Police inDecember 2018 Pittsburgh has mixture of hilly andflat terrain The regions covered by these tests primar-ily contain detached structures one to three stories inheight comparable to the scale of structures in manyother American cities Most sensors are installed onrooftops the major component of the variance in sen-sor elevation is due to the hilly terrain Several of thefiring positions were adjacent to institutional buildingsthat generated loud sharp echoes
Officers secured the target area prior to each test forsafety reasons Live rounds were discharged into a bul-let trap at distance asymp 3 m from the firearm Figure (11)All shots at a giving firing position were discharged withthe muzzle of the firearm pointed in the same directionwhich was not otherwise specified The survey locationof each firing position was determined by ShotSpotterpersonnel during the test using a smartphone applica-tion and qualitatively verified using aerial photographsavailable on Google Earth Survey error ε was not well-characterized during the test but typical performance ofsuch devices (which make use of signals from cellular andWiFi networks in addition to GPS) when used outdoorswith good sky view is on the order of ε = 25 m
Testing followed the standard firing sequence used byShotSpotter This comprises twelve shots (three singleshots and three groups of three shots) for each firing po-sition and tested weapon This test used three different
FIG 11 Firing Position 1 showing the shooter and bullet
trap illustrating the source of the signals used for the test
FP description NM n ε ρ
(m) (sensorskm2)
FP1 overpass ˜35 m above grade 3636 178 414 94
FP2 parking lot near top of hill 3636 143 520 114
FP3 intersection on high bluff 3636 99 349 75
FP4 intersection near top of hill 3636 138 476 94
FP5 playing field at head of valley 3336 116 221 85
FP6 playing field near top of hill 3636 136 554 85
FP7 playing field at end of valley 3636 149 788 124
FP8 intersection at bottom of valley 3636 112 218 99
FP9 parking lot on sloped region 3636 106 693 80
TABLE II Realtime performance at the nine firing positions
(FP) analyzed in present study Buildings at most sites com-
prised detached residential structures 1ndash3 stories in height
with some larger commercial residential and institutional
buildings Ratio NM is number of shots N detected out of
shots fired M n is mean participating sensor count per shot
survey error ε is the distance from the acoustically-determined
centroid to the survey location determined by smartphone-
assisted GPS Sensor density ρ is in sensorskm2 This is 2D
performance using the algorithm matching the most sensors
for each shot
handguns at each firing position (45 cal 40 cal 9 mm)The test sequence was repeated at each of nine firing po-sitions for a total of 162 tests comprising 324 shots Ageneral description of each firing position is given in Ta-ble II Temperature during the test was minus1 plusmn 1C withlight (0ndash2 ms) wind During the real-time tests thesystem detected 100 of incidents and located 969 ofincidents within a 25 m benchmark criterion The cumu-lative distribution function of survey error below 25 m for
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 9
Frac
tion
of in
cide
nts
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
FIG 12 Cumulative distribution function of survey error
during live-fire testings For live fire incidents 3-shot bursts
are detected and scored as a single incident
all tests is shown Figure 12 The real-time ShotSpottersystem bundles multiple closely-spaced shots into a singleincident so scoring is per-test rather than per-shot
Following each activation the system requests two-second samples of 12 kHz audio to facilitate machineclassification The results of the on-sensor pulse anal-ysis are stored in a database for later use Following thetest ShotSpotter personnel retrieved up to eight secondsof additional audio from selected sensors located within800 m of the firing position The range limit is in align-ment with the audio retrieval policy adopted by the com-pany when servicing forensic requests The present studylimits performance analysis to sensors located within an800 m radius of each firing position
Selected data from these tests are available as sup-plementary materials These materials include pulsedata (impulse arrival time signal-to-noise ratio acousticpower and sensor position) and up to six 12 kHz audiofiles for each test Courts of law routinely redact sensorlocations from trial records because of the risk of retal-iation against property owners accordingly the sensorlocations in the dataset are provided relative to an arbi-trary (and unpublished) origin that is different for eachfiring position
The pulse data include a record of impulsive soundstriggered during the time range around each test Theseinclude muzzle-blast sounds with near line-of-sight prop-agation paths that are useful for multilateration locationas well as multipath signals and other impulsive noisesources that are unrelated to the gunfire test ShotSpot-ter uses various pattern-matching and combinatorial con-sistency algorithms to pick sets of pulses suitable for mul-
tilateration While these routines are not revealed in thepresent work the output of the pulse selection algorithms(as tuples of pulses for each shot of each test) are pro-vided as supplementary materials
V ANALYSIS
A Multilateration Implementations
The nine firing positions (Table II) were re-analyzedoffline to evaluate the performance of the four 2D imple-mentations available (Reddi LeastSquares MLG andIDT) The input data were tuples of shortest acousticpath pulses within 800 m The mean number of partic-ipating sensors per shot ranged from 96 to 175 wellover the four needed for unambiguous 2D multilatera-tion Results by implementation are shown in Table IIIThe survey error ε is the two-dimensional distance fromthe acoustic multilateration centroid to the survey loca-tion determined by smartphone GPS σ1 and σ2 are thesquare roots of the eigenvalues of the two-dimensional co-variance matrix Two-dimensional distance is consideredthe appropriate error measure in a public safety context
All four routines solve the same mathematicalproblemmdashminimizing the difference between the pre-dicted and measured arrival times at the several sensorsassuming a straight-line propagation modelmdashso unsur-prisingly similar results are obtained from all four algo-rithms The Reddi implementation uses the first report-ing sensor as a reference which gives more weight to thenearest sensor than to all of the rest The LeastSquaresand related IDT routines yield good accuracy and stabil-ity but the LeastSquares requires an extra TDoA and theIDT routine has a running time roughly ten times longerthan Reddi or MLG for the same input data because itis iterative The MLG implementation requires only theminimum number of TDoAs for a solution does not ar-bitrarily overweight a single sensor works in two or threedimensions and also has the fastest running time sincethe computation required to set up R is simple and Rdagger
can be computed using SVD The MLG implementationwas used in the remainder of the study
B Effects of geometric constraint
While a ShotSpotter array in Californiarsquos CentralValley has a vertical range of just 10 m over its entire5 km extent the Pittsburgh array under study has sen-sor elevation change (comprising terrain plus buildingheight) of up to 160 m over 1 km This makes the arraysuitable for a study of the effect of geometric constrainton location accuracy
All incidents were relocated under the three geomet-ric constraints (2D 25D 3D) to quantify the effect ofincluding elevation data in the multilateration calcula-tion The system was permitted to use any algorithm inselecting pulse sets for multilateration the MLG algo-rithm was used for the final location computation Theresults (Table IV) show that 2D location results are very
10 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 7 Firing Position 8 Firing Position 9
FIG 13 Sensor positions shown relative to Firing Positions 1ndash9 which are located at the center of each plot The filled
circles show those sensors that participated in at least one shot the dashed ldquodetection limitrdquo is the convex hull of those sensors
reporting in at least 50 of shots
similar with no apparent improvement due to the use of3D straight-line distance as a propagation model
A possible explanation is that a shot fired at groundlevel makes one diffracted path at the nearest buildingand then travels above the roofline along a path well-approximated by the 2D straight-line distance 2D mul-tilateration is implicitly locating in the plane of the sen-sors so the system may be locating the best-fit location
of a point slightly above the shooter Because the 2Ddistances between sensors are so much larger than heightof typical sensors above ground the error introduced bythis process is small
These results suggest that the 2D geometric con-straint is appropriate for acoustic multilateration of gun-shots even in hilly terrain The resulting locations areof high accuracy with precision of a few meters even
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 11
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

II THEORY OF GUNSHOT LOCATION
A Source signal
The muzzle blast of a gunshot is an impulsive acous-tic source that emits power over a broad range of frequen-cies (Weber 1939) developed an expression for the pres-sure of spark explosions that has applicability to muzzleblasts the resulting expression is similar to that intro-duced by (Friedlander 1946) The single parameter ofthe Weber model is the Weber radius rw the radius atwhich the supersonic combustion products decelerate tosonic velocity Unlike explosions muzzle blasts are highlydirectional (Beck et al 2011 Maher and Shaw 2010) butthey can be modeled as a Weber source in which the sizeof rw depends on the angle between the gun barrel andthe receiver (Hirsch and Bertels 2013)
Muzzle blasts are simple impulses (Maher 2009) andrecordings made in open environments (such as KrugerNational Park in South Africa Figure 1 top) show rea-sonable agreement with simple models (Don and Cra-mond 1987 Embleton 1996) In built-up areas propa-gation distances are shorter and the received waveformsare more complicated (Figure 1 bottom) (Hornikx2016) notes that ldquosound pressure levels in urban areasdepend at one hand on the actual sound sources and atthe other hand on the propagation of sound from thesesources in the environmentrdquo a statement that is particu-larly applicable to urban gunshots where a simple sourcesignal becomes a complicated received signal as a resultof the environment In urban environments the acousticenergy of the muzzle blast is transferred from source toa receiver via many different paths including specularand diffuse reflection (echoes and reverberation) diffrac-tion (transmission around structures) refraction (bend-ing due to speed-of-sound gradient) as attenuated byabsorption in the atmosphere and at surfaces (Kapra-los et al 2008) It is possible to model acoustic propa-gation in an urban environment using ray-tracing andother computational modeling techniques (Albert andLiu 2010 Le Bot and Bocquillet 2000 Mehra et al2014 Parker et al 2007 Pasareanu et al 2018 Remil-lieux et al 2012 Stevens and Murphy 2014) but thesemodels require a structural model of the area and are insome cases computationally demanding
A simpler approach (Showen 1997 Showen et al2008) is to deploy more than the minimum number of sen-sors required for multilateration and assume a sufficientnumber of sensors will receive detectable levels of muzzleblast energy via paths well-approximated by a straight-line propagation model These ldquonear line-of-sightrdquo pulsescan be identified by constructing sets of pulses from ap-propriate sensors computing a prospective location fromthe pulse set and comparing arrival time predictions ofthe model with the measured arrival time on each sensorThe goal of this combinatorial optimization problem is tofind the largest set of pulses that meet a mutual consis-tency test Specular reflections (echoes) are rejected be-cause the path between source and each sensor is distinctresulting in different echo patterns in each received sig-
nal only pulses from ldquonear line-of-sightrdquo paths pass themutual consistency test This principle is illustrated inFigure 2 which shows the envelopes of three successiveshots detected on five different sensors Strong echoesare detected on three of the sensors but only the initialimpulse from each shot is consistent with a straight-linepropagation model on all the fives sensors The mutualconsistency method can only be used when the number ofreporting sensors exceeds the minimum number of timedifferences of arrival (TDoAs) required for multilatera-tion The method works best when the sensor density ishigh enough to ensure gunshots are detected on at leasttwo more sensors than required for multilateration butnot so high that the system generates false triggers onunwanted sources of impulsive noise such as constructionnoise
05
-05
00
473 m
05
-05
00
time s020 002 004 006 008 01 012 014 016 018
443 m
FIG 1 Firearms discharged at similar ranges in an open
environment (top Kruger National Park South Africa) and
in an urban environment (bottom city in the midwestern
United States) the vertical scale is with respect to ADC full
scale of 93 dB SPL = 10
B Pulse localization
In built environments the acoustic energy from amuzzle blast arrives via multiple paths Energy transmit-ted via the shortest acoustic path arrives first additionalenergy from the blast is delivered via reflections and otherindirect paths over a period of time that may extend toseveral seconds In the present work signal refers to theacoustic pressure change induced by the muzzle blast asmeasured by a remote microphone as a function of timethe goal of the pulse detection algorithm is to identifythe arrival time of pulsesmdashfast rise time portions of themeasured signalmdashthat are plausibly due to muzzle blastenergy arriving via the shortest acoustic path Becauseshortest acoustic paths are often not line-of-sight pathssignificant attenuation may occur and the acceptance cri-teria for muzzle blast impulses must necessarily be broad
One effective strategy for detecting plausible muzzleblasts in built environments is to convolve the envelopeof an acoustic signal with a step-detection kernel Thisacknowledges that muzzle blast power will be broadlydistributed in the time domain while giving the mostweight to the earliest-arriving signal
2 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
10
00
05
79 m
10
00
05
223 m
10
00
05
350 m
10
00
05
474 m
10
00
05
time s2000 02 04 06 08 10 12 14 16 18
775 m
FIG 2 Waveform envelopes for a sequence of 3 rounds from
a 9mm pistol as recorded by sensors at 79 m 223 m 350 m
474 m and 775 m showing that range alone is not a good pre-
dictor of signal strength Echo patterns vary from location to
location allowing the near line-of-sight paths to be identified
through their greater self-consistency The signals have been
aligned in the time domain the vertical scale is the same for
all plots with amplitude of 10 corresponding to ADC full
scale of 93 dB SPL
Let f(t) be the amplitude of an acoustic signal asa function of time t The instantaneous magnitude (orenvelope) of f(t) is given by the magnitude of the analyticassociate of f(t)
f = f(t) + iH(f(t))
whereH(f(t)) is the Hilbert transform of f(t) (Boashash2015) Define a weighted step-detection kernel g(t) as
g(t) =
tτ + 1 for minus τ lt t le 0
minus12 for 0 lt t le τ0 otherwise
(1)
where τ is a length scale over which the signal should beaveraged
Define x(t) as the convolution the signal envelopef(t) and kernel g(t)
x(t) = (f lowast g)(t) (2)
The pulse arrival time is defined as the time t at whichx(t) is locally maximized Pulses with values of x(t) thatfall below a threshold are discarded
The kernel g gives as much weight to the absence ofsignal prior to pulse arrival as it does to the amplitude ofthe signal that follows this provides consistent estimatesof the arrival time of the most direct (earliest-arriving)path even when the energy received via that path is asmall fraction of the total Increasing the length scale τreduces spurious triggering on echoes and reverberationbut an excessively long window reduces the ability to de-tect closely-spaced shots Empirically a value of 50 mshas been found to work well on both isolated shots andthe range of semi-automatic (300 rpm) and fully auto-matic (450ndash950 rpm) firearms encountered in a public-safety context Note this is 10ndash20 times the duration ofa muzzle blast measured on an open range (Beck et al2011 Maher 2011 Routh and Maher 2016) which is onthe order of 2 ms
10
-10
-08
-06
-04
-02
00
02
04
06
08
time s05050495 0496 0497 0498 0499 0500 0501 0502 0503 0504
223 m
FIG 3 Pulse arrival time (red dot) plotted on the original
waveform for sensor at 223 m distance from Figure 2 Dotted
line shows output of pulse localization function x(t) from (2)
The full scale amplitude approximately 93 dB SPL
C Pulse Selection
In urban environments true line-of-sight paths arerare ldquoNear line-of-sightrdquo paths where the received sig-nal is line-of-sight after a single diffraction over a barriercan be used for location because the typical height ofbuildings is small compared with the distances betweenacoustic sensors Use of non-line of sight paths with sig-nificant time delays such as those generated by specularreflections from buildings and other hard surfaces willcause significant location error if used in a multilatera-tion calculation Associating pulses from one shot withpulses from a different shot will also result in large mul-tilateration error
The construction of sets of pulses that are appropri-ate for multilateration becomes more difficult as the num-ber of shots and number of shooters increases ShotSpot-terrsquos pulse selection algorithms use a combination of com-binatorial optimization pattern-matching and numericaloptimization methods to search for the largest possibleset of mutually-consistent pulses for each shot The se-
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 3
lection of appropriate pulses for multilateration is an in-volved topic (Beck 2019 Calhoun 2011 Showen et al2008) and a full discussion of the methods used is out-side the scope of the present work To facilitate reviewof the present multilateration results the output of theShotSpotter pulse selection routines (comprising sets ofacceptably ldquonear line of sightrdquo pulses for each shot) areprovided as part of the supplemental materials alongwith sufficient audio data to verify that the selectedpulses are associated with the shortest acoustic path1Because the search for pulse sets is not exhaustive thetuples provided are not guaranteed to be an optimal sub-set for each test However all pulses in a tuple will havean error of less than 40 ms between the measured arrivaltime and the predictions of a straight-line propagationmodel
D Source Localization
Acoustic multilateration the location of a sourcefrom multiple time difference of arrivals (TDoAs) hasbeen in use since World War I when French (Aubin andGoldstein 2014) Canadian (Finan and Hurley 1997)and British forces (Van der Kloot 2005) used sound rang-ing to locate the source of artillery fire Many multilater-ation algorithms have been documented since that timeA multilateration solution in d dimensions requires atleast n = d + 1 reporting sensors Some n = d + 1solutions have two mathematically consistent solutionsAdditional methods not discussed in the present worksuch as measurements of angle-of-arrival (AoA) or re-ceived signal power are required to resolve ambiguoussolutions so the present work focuses on solutions forwhich n ge d + 2 for which the multilateration solutionis always unique given non-degenerate sensor placement
The TDoA source location problem reduces to find-ing the point of intersection of multiple hyperboloids sothe algorithms comprise variations on a common themeShotSpotter uses multiple algorithms because they ex-hibit different numerical stability and sensitivity to thechoice of a reference sensor Below we analyze the ac-curacy of four algorithms and three constraints under avariety of array densities to compare their relative per-formance under real-world test conditions A goal of thepresent work is to identify which algorithm is best-suitedfor forensic work All solutions discussed assume line-of-sight propagation in a homogeneous stationary medium
1 Reddi
This implementation is based on (Reddi 1993)With reference sensor at (0 0 0) and other sensors at(xi yi zi) i = 1 2 3 n source location (xlowast ylowast zlowast)can be found from relative arrival times ti by equatingthe squared distance from the reference to the source withthe square distance of the reference to the other sensors
cti = Si minusradicx2 + y2 + z2 (3)
1400
m
1400 m
FIG 4 Graphical representation of the intersecting hyper-
bola approach characteristic of Reddi algorithm The refer-
ence sensor that defines the time differences of arrival is the
first reporting sensor The sample data is from test 1 at Firing
Position 4
for i = (1 2 n) where
S2i = (xminus xi)2 + (y minus yi)2 + (z minus zi)2
This reduces to a quadratic equation that can be solvedfor source location (xlowast ylowast zlowast) Discharge time tlowast is ob-tained from the mean value of ti minus Sic at (xlowast ylowast zlowast)This implementation requires a minimum of d+1 TDoAswhere d is the number of dimensions
2 MLG
(Mathias et al 2008) avoid use of a reference sen-sor by minimizing the squared error on each sensorShotSpotterrsquos ldquoMLGrdquo implementation slightly modifiesthis algorithm by solving for time-distance (ct) insteadof t which improves computational stability For thesimplified case of overdetermined systems (n gt d + 1)with receiver matrix
R =
x0 x1 xiy0 y1 yiz0 z1 ziminusct0 minusct1 minusctiminusc2 minusc2 minusc2
(4)
4 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
the solution vector is given byx
y
z
ct
vc
=1
2Rdagger
x20 + y20 + z20 minus (ct0)2
x21 + y21 + z21 minus (ct1)2
x2i + y2i + z2i minus (cti)2
(5)
where v is an error term and Rdagger is the pseudoinverse ofR See (Mathias et al 2008) for handling of the fullydetermined case (n = d+ 1) and for a quantification oferror propagation in multilateration
3 LeastSquares
The ldquoLeastSquaresrdquo implementation is another least-squares minimizer based on time difference of arrivalsbetween pairs of sensors Equating the squares of the dis-tance and the time-distance gives one equation for eachsensor i
(xi minus x)2 + (yi minus y)2 + (zi minus z)2 = (cti minus ct)2 (6)
Subtracting the ith equation from the (i+ 1)-st elimi-nates quadratic terms Define Xi to be the differencebetween the LHS (distance) and RHS (time-distance) ofthe ith difference equation When
χ2 =
nminus1sumi=1
X2i
the minimum value of χ2 is the point at which
partχ2
partx=partχ2
party=partχ2
partz=partχ2
partct= 0
This gives a linear system in d+ 1 variablesaiai aibi aici aidibiai bibi bici bidiciai cibi cici cididiai dibi dici didi
x
y
z
ct
=
aieibieicieidiei
(7)
where
ai = (xi+1 minus xi)bi = (yi+1 minus yi)ci = (zi+1 minus zi)di = minusc(ti+1 minus ti) and
ei =1
2(x2i+1 + y2i+1 + z2i+1 + c2t2i minus x2i minus y2i minus z2i minus c2t2i+1)
This requires an additional TDoA compared with theReddi and MLG implementations
4 Iterative Discharge Time
Combustion of the propellant used firearms gener-ates an optical signal known as the muzzle flash that
1400
m
1400 m
FIG 5 Graphical representation of the intersecting circle ap-
proach characteristic of Iterative Discharge Time algorithm
The sample data is from test 1 at Firing Position 4
is strongest in the medium-wave IR region (Pauli et al2004) If the discharge time tlowast is known from muzzle flashtiming (6) reduces to finding the point of intersection ofcircles (or spheres) of known radius c(ti minus tlowast) This is asimplified version of (7)
When no muzzle flash time is available the dis-charge time can be determined iteratively The ldquoIter-ative Discharge Timerdquo (IDT) implementation uses sim-plex gradient descent to find tlowast based on starting value oftlowast = t0 minus 10 where t0 is the arrival time on the nearest(earliest) sensor and the constant roughly equal to themean distance between a shooter and the first reportingsensor The main advantage over pure TDoA algorithmsis that the range can be bounded which is helpful whenlocating sources outside the sensor array An additionalbenefit of all intersecting circle solutions in a forensic con-text is that the location tuple obtained (xlowast ylowast tlowast) canreadily be checked using the standard tools of plane ge-ometry a ruler and a compass A graphical representa-tion of an intersecting circles solution is shown in Figure5
E Geometric Constraints
Acoustic multilateration can be done in two or threedimensions For two-dimensional multilateration thesensor positions are projected against a plane and themultilateration solution returned is computed in thisplane At least three TDoAs are required For three-dimensional multilateration the sensor elevation data isused without modification and the multilateration solu-tion computed in three-dimensional space Four TDoAsare required for multilateration in three dimensions
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 5
There are two potential advantages of three-dimensional multilateration First a 3D straight-linedistance propagation model can be used This is po-tentially more accurate Second the elevation of theshooter can be estimated The downside of 3D multilat-eration is that the additional degree of freedom allowedby three-dimensional multilateration can lead to less ac-curate 2D results if the sensor position matrix is poorlyconditioned eg the range of vertical elevations of re-porting sensors is small compared with the horizontalspacing between them With poorly-conditioned arrayssmall errors in the measurements of arrival time sensorposition or speed of sound may result in large changesin the shooterrsquos putative elevation
There are plausible use cases for detecting gunshotsabove ground level including locating shots fired fromthe upper floors of a structure and assisting in the classifi-cation of aerial fireworks Nevertheless the vast majorityof firearms are discharged at ground level so a practicalapproach is to do the bulk of pulse selection in two di-mensions and then refine the solution using a 3D modelwhen sufficient data are available
An approach that enables use of a 3D propagationmodel while avoiding the instability of a full 3D solutionis to constrain the shooter location to a two-dimensionalplane This ldquo25Drdquo method (Calhoun 2013) refines aninitial 2D solution by assuming the shooter is standingon the ground (or on the roof of a building) and con-structing R with a duplicate set of sensors with identicalarrival time but position reflected through the horizontalplane containing the shooter Figure 6 The method re-quires use of a digital elevation andor building modelto provide an estimate for zlowast the z-elevation of theshooter With ground plane normal to z each TDoAtuple (xi yi zi ti) in (4) is supplemented with a secondTDoA tuple (xi yi 2zlowastminuszi ti) This doubles the numberof columns in (4) and the number of rows in (5) but nochanges in algorithm are required The solution will beconstrained to elevation zlowast by the symmetry of the inputdata
F Weather Effects
Atmospheric conditions affect sound propagationand therefore the accuracy of an acoustic gunshot loca-tion system The speed of sound varies only slowly withtemperature and little with humidity or pressure so thedry air relationship for the speed of sound c may be usedwith acceptable accuracy This is
c = 2003radicT + 27315 m sminus1 (8)
where T is the temperature in CSound energy is transmitted as a compression wave
in a fluid a moving fluid carries the sound energy withit The multilateration routines of Section II D assumea stationary medium but the effects of a homogeneousmoving fluid can be incorporated by shifting the apparentposition of each sensor to account for air motion fromwhen the shot is fired to when it is detected With the
FIG 6 Method for constructing a sensor array through a
ground plane by reflection This permits use of elevation data
from the remote sensors while constraining the output to the
specified plane
z-axis component of wind vector ~v assumed to be zerothe wind-corrected position of the sensors is given by
[xprimeiyprimei
]=
[xiyi
]minus (ti minus tlowast)
[vxvy
](9)
where ti the arrival time at each sensor and vx and vyare the x- and yminuscomponents of the wind vector Thedischarge time tlowast is not known a priori but it can beestimated by subtracting an appropriate value from thearrival time at the first reporting sensor A suitable valueis the (historic) mean distance from the shooter to thefirst reporting sensor a value of 10 s is appropriate forarrays with sensor densities in the range of 2 sensorskm2
to 12 sensorskm2 The wind-correction process can berepeated with a more accurate value after initial compu-tation of discharge time tlowast
Other deleterious effects of wind are not so easilyhandled Wind increases the background noise detectedby outdoor microphones (Raspet et al 2006) an effectthat can be ameliorated but not entirely eliminated withproper windscreens (Hosier and Donavan 1979 Lin et al2014 Schomer et al 1990 Wuttke 1992) Wind noise re-duces the signal-to-noise ratio of gunshot impulses mak-ing them harder to detect Gradients in wind speed andtemperature with elevation refract the sound bendingit upwards in the upwind direction and downwards inthe downwind direction (Franke et al 1988 Wiener andKeast 1959 Wilson 2003) Upwind refraction createsa ldquoshadow zonerdquo where the gunshot signal is not de-tectable Because of the potential lack of participationfrom upwind sensors during windy conditions additionalsensors must be to deployed to enable successful mul-tilateration in all weather conditions The ShotSpottersystem does not otherwise compensate for the effects ofwind or temperature gradients
6 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
apparentposition
of sensor
wind
sensor
FIG 7 Adjustment of sensor positions to take homogeneous
fluid movement into account Energy is propagated from
source to sensor via a combination of bulk fluid flow and
acoustic propagation The effects of bulk fluid flow can be
incorporated by shifting the apparent position of the sensor
to the position that would have received the signal in the
absence of fluid flow
III SYSTEM DESIGN
A Array design
A typical deployment density is 2 sensorskm2 to12 sensorskm2 with the density dependent on the den-sity of structures and foliage in the covered area The lowend of this range is used in open areas where few struc-tures impede acoustic propagation such as anti-poachingdeployments higher sensor densities are used in areaswith a high density of structures high background noise(traffic rapid transit systems) difficult wind conditionsor unfamiliar environments Sensors are installed on el-evated locations such as rooftops and utility poles to in-crease the number of near line-of-sight audio paths andto minimize background noise Wind noise is mitigatedwith a 35 cm layer of open-cell foam around the micro-phones
B Sensor processing
All signal processing and pulse detection opera-tions are performed in the field on remotely-deployedsingle-board computers based on the Texas InstrumentsAM335x platform Sensor position is provided by a u-blox MAX 7 GPS chipset and the Linux system clockis disciplined using the PPS signal from the GPS Theu-blox MAX-7 series of GPS chipsets have a datasheetlocation accuracy of 25m (50 circular error probability(CEP)) and timepulse accuracy 30 n sec (RMS) Actualperformance depends on the satellite constellation visi-ble from the installed sensor position Because sensorsare rarely moved averaging over long periods of time isa feasible method for improving location precision Eachhour the mean position over the previous hour is storedand a long-term average position re-estimated based onvalues from up to 180 days of hourly records (Figure 8)with the multilateration calculations making use of thelong-term averages It is expected that the increasing
availability of high-accuracy real-time kinematic (RTK)GPS chipsets will reduce or eliminate the need for posi-tion averaging in future multilateration systems
frequ
ency
07
0
01
02
03
04
05
06
2D distance from centroid (m)15000 25 50 75 100 125
by hour
by minute
LTA
FIG 8 Horizontal GPS performance of a typical stationary
sensor showing the distance from the centroid of GPS mea-
surements sampled once per minute of the hourly averages
and of the long-term average of hourly values 50 CEP is
slightly worse than predicted by the datasheet but averag-
ing reduces the RMS distance from the centroid to less than
002 m
Audio sound pressure level is measured usingKingstate KECG2742WBL waterproof electret micro-phones and digitized using a Cirrus Logic WM8737analog-to-digital converter which samples 24-bit audiodata at 48 kHz Microphone sensitivity is minus42 plusmn 3 dBSPL giving a full-scale digital output of approximately93 dB SPL Network connectivity is provided by an on-board cellular data module
For performance reasons the pulse localization algo-rithm described in II B is implemented as a discrete-timealgorithm The digitized input stream is split up into2048-length chunks with 50 overlap so that a Hann win-dow can be applied without data loss After windowingdata is converted into the frequency domain for filter-ing and analysis A typical pulse localization response isshown in Figure 3
system σ (micros)
GPS timepulse 3 times 10minus2
Linux system clock 1 times 10minus3
Pulse start measurement 1 times 102
TABLE I Scale of contributions to pulse arrival time error
Pulse arrival time measurements are derived from au-dio synchronized to the GPS PPS timepulse As shownin Table I the timing errors associated with the GPSsystem are negligible compared with the uncertainty inpulse arrival time measurement The net effect of all
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 7
timing errors is estimated by running the pulse detec-tion algorithm on gunshot-like impulsive signals synchro-nized with GPS PPS This measurement takes into ac-count multiple sources of error The measured timingerror through the ShotSpotter sensors has a mean ofmicro = minus316 micros with a standard deviation of σ = 996 microswith a typical measurement shown in Figure 9 The pulsearrival time data provided and used for multilaterationin the current work are to millisecond precision
coun
ts
125
-100
20
40
60
80
100
microseconds750-1250 -1000 -800 -600 -400 -200 0 200 400 600
FIG 9 Pulse start timing measurements using simulated
gunshot impulses triggered by GPS timepulses
The audio processing code analyzes the first 250 msfollowing pulse arrival time to determine the likelihoodthat the impulse is due to a gunshot muzzle blast Mea-sured characteristics of the impulse include the integratedpower of the impulse the shape of its envelope and a nor-malized power spectrum These data are transmitted toa common endpoint for the multilateration computation
C Classification
The original 48 kHz data is discarded after pulse pro-cessing data downsampled to 12 kHz is cached on thesensor for 30 hours to support forensic analysis Follow-ing detection of a potential gunshot a 2-second subset ofdownsampled (12 kHz) FLAC-encoded audio is retrievedfrom the two closest sensors and used to build an imagemosaic (Figure 10) comprising features characteristic ofthe gunshot audio on each sensor and features character-istic of the incident as a whole A full description of imagemosaic construction is outside of the scope of the presentwork but the tiles comprising the image can be summa-rized as follows A) waveform image B) discrete waveletspectrogram of the de-noised waveform C) pulse time-of-arrival markers aligned using the shooter-sensor timedelay computed via multilateration D) discrete waveletspectrogram of the noise (complement of tile B above)E) wavelet transform of the first impulse F) waveformof the first impulse G) participating area as defined bythe Voronoi diagram of participating sensors H) locationof recent nearby incidents I) plots of various per-sensorparameters as a function of distance J) version-tracking
code K) time-of-date counters L) individual shot loca-tions M) power spectrum N O P) pulse feature coun-ters Q R) recent incident counters S) logo Discretewavelet transforms are performed using the biorthogonal22 wavelet and scaling functions
Classification of the mosaic images is performed us-ing the ResNet (He et al 2016) image classifier trainedusing field-collected data labelled by human reviewersEach mosaic image (one from the nearest sensor and onefrom the second-nearest) is classified independently theoutputs of the two classifiers are combined to minimizethe likelihood of false negatives In the vast majority ofcases ldquoground truthrdquo (eg shell casings video record-ings) is not available and it is to be expected that sometraining data are misidentified
A
BCDE
F G H I
J K L M N O P Q R S
FIG 10 The top image shows a typical mosaic image used for
machine classification with ResNet image classifier This ex-
ample is from a 9 mm firearm discharged at Firing Position 8
Each image used for classification is comprised of 19 individ-
ual tiles some tiles are derived from a 2-second subset of 12
kHz audio while others are derived from the characteristics
of the incident as a whole See text for tile descriptions
8 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Incidents classified as gunfire are pushed to the pub-lic safety agencyrsquos dispatch system andor mobile de-vices All of the pulse data associated with an inci-dent is stored in a database so that the measurementsmade by the remote sensor are available for later anal-ysis If a forensic report is requested (typically in thecourse of a criminal investigation) within 24 hours eightseconds of 12 kHz downsampled audio may be retrievedfrom sensors participating in the incident The down-sampled audio is invaluable for verifying that the pulseselection algorithms have grouped the input pulse datainto appropriate subsets for multilateration
D Weather Measurements
Reliable temperature data with a precision of plusmn1 Care available via NWS METAR readings from major air-ports measurements from Pittsburgh International Air-port (KPIT) and Allegheny County Airport (KAGC)were used in the present work Wind is highly depen-dent on local conditions and sensor mounting elevationso the airport values can provide only a rough estimateof local conditions but both airports reported negligiblewind of 0 m sminus1 to 5 m sminus1 during the live fire test so theeffects of wind were not investigated
IV DESCRIPTION OF LIVE FIRE TESTS
ShotSpotter sensor arrays are routinely tested priorto active use by law enforcement The live fire test ofthe ShotSpotter system examined here was conducted inPittsburgh PA by the Pittsburgh Bureau of Police inDecember 2018 Pittsburgh has mixture of hilly andflat terrain The regions covered by these tests primar-ily contain detached structures one to three stories inheight comparable to the scale of structures in manyother American cities Most sensors are installed onrooftops the major component of the variance in sen-sor elevation is due to the hilly terrain Several of thefiring positions were adjacent to institutional buildingsthat generated loud sharp echoes
Officers secured the target area prior to each test forsafety reasons Live rounds were discharged into a bul-let trap at distance asymp 3 m from the firearm Figure (11)All shots at a giving firing position were discharged withthe muzzle of the firearm pointed in the same directionwhich was not otherwise specified The survey locationof each firing position was determined by ShotSpotterpersonnel during the test using a smartphone applica-tion and qualitatively verified using aerial photographsavailable on Google Earth Survey error ε was not well-characterized during the test but typical performance ofsuch devices (which make use of signals from cellular andWiFi networks in addition to GPS) when used outdoorswith good sky view is on the order of ε = 25 m
Testing followed the standard firing sequence used byShotSpotter This comprises twelve shots (three singleshots and three groups of three shots) for each firing po-sition and tested weapon This test used three different
FIG 11 Firing Position 1 showing the shooter and bullet
trap illustrating the source of the signals used for the test
FP description NM n ε ρ
(m) (sensorskm2)
FP1 overpass ˜35 m above grade 3636 178 414 94
FP2 parking lot near top of hill 3636 143 520 114
FP3 intersection on high bluff 3636 99 349 75
FP4 intersection near top of hill 3636 138 476 94
FP5 playing field at head of valley 3336 116 221 85
FP6 playing field near top of hill 3636 136 554 85
FP7 playing field at end of valley 3636 149 788 124
FP8 intersection at bottom of valley 3636 112 218 99
FP9 parking lot on sloped region 3636 106 693 80
TABLE II Realtime performance at the nine firing positions
(FP) analyzed in present study Buildings at most sites com-
prised detached residential structures 1ndash3 stories in height
with some larger commercial residential and institutional
buildings Ratio NM is number of shots N detected out of
shots fired M n is mean participating sensor count per shot
survey error ε is the distance from the acoustically-determined
centroid to the survey location determined by smartphone-
assisted GPS Sensor density ρ is in sensorskm2 This is 2D
performance using the algorithm matching the most sensors
for each shot
handguns at each firing position (45 cal 40 cal 9 mm)The test sequence was repeated at each of nine firing po-sitions for a total of 162 tests comprising 324 shots Ageneral description of each firing position is given in Ta-ble II Temperature during the test was minus1 plusmn 1C withlight (0ndash2 ms) wind During the real-time tests thesystem detected 100 of incidents and located 969 ofincidents within a 25 m benchmark criterion The cumu-lative distribution function of survey error below 25 m for
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 9
Frac
tion
of in
cide
nts
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
FIG 12 Cumulative distribution function of survey error
during live-fire testings For live fire incidents 3-shot bursts
are detected and scored as a single incident
all tests is shown Figure 12 The real-time ShotSpottersystem bundles multiple closely-spaced shots into a singleincident so scoring is per-test rather than per-shot
Following each activation the system requests two-second samples of 12 kHz audio to facilitate machineclassification The results of the on-sensor pulse anal-ysis are stored in a database for later use Following thetest ShotSpotter personnel retrieved up to eight secondsof additional audio from selected sensors located within800 m of the firing position The range limit is in align-ment with the audio retrieval policy adopted by the com-pany when servicing forensic requests The present studylimits performance analysis to sensors located within an800 m radius of each firing position
Selected data from these tests are available as sup-plementary materials These materials include pulsedata (impulse arrival time signal-to-noise ratio acousticpower and sensor position) and up to six 12 kHz audiofiles for each test Courts of law routinely redact sensorlocations from trial records because of the risk of retal-iation against property owners accordingly the sensorlocations in the dataset are provided relative to an arbi-trary (and unpublished) origin that is different for eachfiring position
The pulse data include a record of impulsive soundstriggered during the time range around each test Theseinclude muzzle-blast sounds with near line-of-sight prop-agation paths that are useful for multilateration locationas well as multipath signals and other impulsive noisesources that are unrelated to the gunfire test ShotSpot-ter uses various pattern-matching and combinatorial con-sistency algorithms to pick sets of pulses suitable for mul-
tilateration While these routines are not revealed in thepresent work the output of the pulse selection algorithms(as tuples of pulses for each shot of each test) are pro-vided as supplementary materials
V ANALYSIS
A Multilateration Implementations
The nine firing positions (Table II) were re-analyzedoffline to evaluate the performance of the four 2D imple-mentations available (Reddi LeastSquares MLG andIDT) The input data were tuples of shortest acousticpath pulses within 800 m The mean number of partic-ipating sensors per shot ranged from 96 to 175 wellover the four needed for unambiguous 2D multilatera-tion Results by implementation are shown in Table IIIThe survey error ε is the two-dimensional distance fromthe acoustic multilateration centroid to the survey loca-tion determined by smartphone GPS σ1 and σ2 are thesquare roots of the eigenvalues of the two-dimensional co-variance matrix Two-dimensional distance is consideredthe appropriate error measure in a public safety context
All four routines solve the same mathematicalproblemmdashminimizing the difference between the pre-dicted and measured arrival times at the several sensorsassuming a straight-line propagation modelmdashso unsur-prisingly similar results are obtained from all four algo-rithms The Reddi implementation uses the first report-ing sensor as a reference which gives more weight to thenearest sensor than to all of the rest The LeastSquaresand related IDT routines yield good accuracy and stabil-ity but the LeastSquares requires an extra TDoA and theIDT routine has a running time roughly ten times longerthan Reddi or MLG for the same input data because itis iterative The MLG implementation requires only theminimum number of TDoAs for a solution does not ar-bitrarily overweight a single sensor works in two or threedimensions and also has the fastest running time sincethe computation required to set up R is simple and Rdagger
can be computed using SVD The MLG implementationwas used in the remainder of the study
B Effects of geometric constraint
While a ShotSpotter array in Californiarsquos CentralValley has a vertical range of just 10 m over its entire5 km extent the Pittsburgh array under study has sen-sor elevation change (comprising terrain plus buildingheight) of up to 160 m over 1 km This makes the arraysuitable for a study of the effect of geometric constrainton location accuracy
All incidents were relocated under the three geomet-ric constraints (2D 25D 3D) to quantify the effect ofincluding elevation data in the multilateration calcula-tion The system was permitted to use any algorithm inselecting pulse sets for multilateration the MLG algo-rithm was used for the final location computation Theresults (Table IV) show that 2D location results are very
10 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 7 Firing Position 8 Firing Position 9
FIG 13 Sensor positions shown relative to Firing Positions 1ndash9 which are located at the center of each plot The filled
circles show those sensors that participated in at least one shot the dashed ldquodetection limitrdquo is the convex hull of those sensors
reporting in at least 50 of shots
similar with no apparent improvement due to the use of3D straight-line distance as a propagation model
A possible explanation is that a shot fired at groundlevel makes one diffracted path at the nearest buildingand then travels above the roofline along a path well-approximated by the 2D straight-line distance 2D mul-tilateration is implicitly locating in the plane of the sen-sors so the system may be locating the best-fit location
of a point slightly above the shooter Because the 2Ddistances between sensors are so much larger than heightof typical sensors above ground the error introduced bythis process is small
These results suggest that the 2D geometric con-straint is appropriate for acoustic multilateration of gun-shots even in hilly terrain The resulting locations areof high accuracy with precision of a few meters even
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 11
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

10
00
05
79 m
10
00
05
223 m
10
00
05
350 m
10
00
05
474 m
10
00
05
time s2000 02 04 06 08 10 12 14 16 18
775 m
FIG 2 Waveform envelopes for a sequence of 3 rounds from
a 9mm pistol as recorded by sensors at 79 m 223 m 350 m
474 m and 775 m showing that range alone is not a good pre-
dictor of signal strength Echo patterns vary from location to
location allowing the near line-of-sight paths to be identified
through their greater self-consistency The signals have been
aligned in the time domain the vertical scale is the same for
all plots with amplitude of 10 corresponding to ADC full
scale of 93 dB SPL
Let f(t) be the amplitude of an acoustic signal asa function of time t The instantaneous magnitude (orenvelope) of f(t) is given by the magnitude of the analyticassociate of f(t)
f = f(t) + iH(f(t))
whereH(f(t)) is the Hilbert transform of f(t) (Boashash2015) Define a weighted step-detection kernel g(t) as
g(t) =
tτ + 1 for minus τ lt t le 0
minus12 for 0 lt t le τ0 otherwise
(1)
where τ is a length scale over which the signal should beaveraged
Define x(t) as the convolution the signal envelopef(t) and kernel g(t)
x(t) = (f lowast g)(t) (2)
The pulse arrival time is defined as the time t at whichx(t) is locally maximized Pulses with values of x(t) thatfall below a threshold are discarded
The kernel g gives as much weight to the absence ofsignal prior to pulse arrival as it does to the amplitude ofthe signal that follows this provides consistent estimatesof the arrival time of the most direct (earliest-arriving)path even when the energy received via that path is asmall fraction of the total Increasing the length scale τreduces spurious triggering on echoes and reverberationbut an excessively long window reduces the ability to de-tect closely-spaced shots Empirically a value of 50 mshas been found to work well on both isolated shots andthe range of semi-automatic (300 rpm) and fully auto-matic (450ndash950 rpm) firearms encountered in a public-safety context Note this is 10ndash20 times the duration ofa muzzle blast measured on an open range (Beck et al2011 Maher 2011 Routh and Maher 2016) which is onthe order of 2 ms
10
-10
-08
-06
-04
-02
00
02
04
06
08
time s05050495 0496 0497 0498 0499 0500 0501 0502 0503 0504
223 m
FIG 3 Pulse arrival time (red dot) plotted on the original
waveform for sensor at 223 m distance from Figure 2 Dotted
line shows output of pulse localization function x(t) from (2)
The full scale amplitude approximately 93 dB SPL
C Pulse Selection
In urban environments true line-of-sight paths arerare ldquoNear line-of-sightrdquo paths where the received sig-nal is line-of-sight after a single diffraction over a barriercan be used for location because the typical height ofbuildings is small compared with the distances betweenacoustic sensors Use of non-line of sight paths with sig-nificant time delays such as those generated by specularreflections from buildings and other hard surfaces willcause significant location error if used in a multilatera-tion calculation Associating pulses from one shot withpulses from a different shot will also result in large mul-tilateration error
The construction of sets of pulses that are appropri-ate for multilateration becomes more difficult as the num-ber of shots and number of shooters increases ShotSpot-terrsquos pulse selection algorithms use a combination of com-binatorial optimization pattern-matching and numericaloptimization methods to search for the largest possibleset of mutually-consistent pulses for each shot The se-
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 3
lection of appropriate pulses for multilateration is an in-volved topic (Beck 2019 Calhoun 2011 Showen et al2008) and a full discussion of the methods used is out-side the scope of the present work To facilitate reviewof the present multilateration results the output of theShotSpotter pulse selection routines (comprising sets ofacceptably ldquonear line of sightrdquo pulses for each shot) areprovided as part of the supplemental materials alongwith sufficient audio data to verify that the selectedpulses are associated with the shortest acoustic path1Because the search for pulse sets is not exhaustive thetuples provided are not guaranteed to be an optimal sub-set for each test However all pulses in a tuple will havean error of less than 40 ms between the measured arrivaltime and the predictions of a straight-line propagationmodel
D Source Localization
Acoustic multilateration the location of a sourcefrom multiple time difference of arrivals (TDoAs) hasbeen in use since World War I when French (Aubin andGoldstein 2014) Canadian (Finan and Hurley 1997)and British forces (Van der Kloot 2005) used sound rang-ing to locate the source of artillery fire Many multilater-ation algorithms have been documented since that timeA multilateration solution in d dimensions requires atleast n = d + 1 reporting sensors Some n = d + 1solutions have two mathematically consistent solutionsAdditional methods not discussed in the present worksuch as measurements of angle-of-arrival (AoA) or re-ceived signal power are required to resolve ambiguoussolutions so the present work focuses on solutions forwhich n ge d + 2 for which the multilateration solutionis always unique given non-degenerate sensor placement
The TDoA source location problem reduces to find-ing the point of intersection of multiple hyperboloids sothe algorithms comprise variations on a common themeShotSpotter uses multiple algorithms because they ex-hibit different numerical stability and sensitivity to thechoice of a reference sensor Below we analyze the ac-curacy of four algorithms and three constraints under avariety of array densities to compare their relative per-formance under real-world test conditions A goal of thepresent work is to identify which algorithm is best-suitedfor forensic work All solutions discussed assume line-of-sight propagation in a homogeneous stationary medium
1 Reddi
This implementation is based on (Reddi 1993)With reference sensor at (0 0 0) and other sensors at(xi yi zi) i = 1 2 3 n source location (xlowast ylowast zlowast)can be found from relative arrival times ti by equatingthe squared distance from the reference to the source withthe square distance of the reference to the other sensors
cti = Si minusradicx2 + y2 + z2 (3)
1400
m
1400 m
FIG 4 Graphical representation of the intersecting hyper-
bola approach characteristic of Reddi algorithm The refer-
ence sensor that defines the time differences of arrival is the
first reporting sensor The sample data is from test 1 at Firing
Position 4
for i = (1 2 n) where
S2i = (xminus xi)2 + (y minus yi)2 + (z minus zi)2
This reduces to a quadratic equation that can be solvedfor source location (xlowast ylowast zlowast) Discharge time tlowast is ob-tained from the mean value of ti minus Sic at (xlowast ylowast zlowast)This implementation requires a minimum of d+1 TDoAswhere d is the number of dimensions
2 MLG
(Mathias et al 2008) avoid use of a reference sen-sor by minimizing the squared error on each sensorShotSpotterrsquos ldquoMLGrdquo implementation slightly modifiesthis algorithm by solving for time-distance (ct) insteadof t which improves computational stability For thesimplified case of overdetermined systems (n gt d + 1)with receiver matrix
R =
x0 x1 xiy0 y1 yiz0 z1 ziminusct0 minusct1 minusctiminusc2 minusc2 minusc2
(4)
4 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
the solution vector is given byx
y
z
ct
vc
=1
2Rdagger
x20 + y20 + z20 minus (ct0)2
x21 + y21 + z21 minus (ct1)2
x2i + y2i + z2i minus (cti)2
(5)
where v is an error term and Rdagger is the pseudoinverse ofR See (Mathias et al 2008) for handling of the fullydetermined case (n = d+ 1) and for a quantification oferror propagation in multilateration
3 LeastSquares
The ldquoLeastSquaresrdquo implementation is another least-squares minimizer based on time difference of arrivalsbetween pairs of sensors Equating the squares of the dis-tance and the time-distance gives one equation for eachsensor i
(xi minus x)2 + (yi minus y)2 + (zi minus z)2 = (cti minus ct)2 (6)
Subtracting the ith equation from the (i+ 1)-st elimi-nates quadratic terms Define Xi to be the differencebetween the LHS (distance) and RHS (time-distance) ofthe ith difference equation When
χ2 =
nminus1sumi=1
X2i
the minimum value of χ2 is the point at which
partχ2
partx=partχ2
party=partχ2
partz=partχ2
partct= 0
This gives a linear system in d+ 1 variablesaiai aibi aici aidibiai bibi bici bidiciai cibi cici cididiai dibi dici didi
x
y
z
ct
=
aieibieicieidiei
(7)
where
ai = (xi+1 minus xi)bi = (yi+1 minus yi)ci = (zi+1 minus zi)di = minusc(ti+1 minus ti) and
ei =1
2(x2i+1 + y2i+1 + z2i+1 + c2t2i minus x2i minus y2i minus z2i minus c2t2i+1)
This requires an additional TDoA compared with theReddi and MLG implementations
4 Iterative Discharge Time
Combustion of the propellant used firearms gener-ates an optical signal known as the muzzle flash that
1400
m
1400 m
FIG 5 Graphical representation of the intersecting circle ap-
proach characteristic of Iterative Discharge Time algorithm
The sample data is from test 1 at Firing Position 4
is strongest in the medium-wave IR region (Pauli et al2004) If the discharge time tlowast is known from muzzle flashtiming (6) reduces to finding the point of intersection ofcircles (or spheres) of known radius c(ti minus tlowast) This is asimplified version of (7)
When no muzzle flash time is available the dis-charge time can be determined iteratively The ldquoIter-ative Discharge Timerdquo (IDT) implementation uses sim-plex gradient descent to find tlowast based on starting value oftlowast = t0 minus 10 where t0 is the arrival time on the nearest(earliest) sensor and the constant roughly equal to themean distance between a shooter and the first reportingsensor The main advantage over pure TDoA algorithmsis that the range can be bounded which is helpful whenlocating sources outside the sensor array An additionalbenefit of all intersecting circle solutions in a forensic con-text is that the location tuple obtained (xlowast ylowast tlowast) canreadily be checked using the standard tools of plane ge-ometry a ruler and a compass A graphical representa-tion of an intersecting circles solution is shown in Figure5
E Geometric Constraints
Acoustic multilateration can be done in two or threedimensions For two-dimensional multilateration thesensor positions are projected against a plane and themultilateration solution returned is computed in thisplane At least three TDoAs are required For three-dimensional multilateration the sensor elevation data isused without modification and the multilateration solu-tion computed in three-dimensional space Four TDoAsare required for multilateration in three dimensions
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 5
There are two potential advantages of three-dimensional multilateration First a 3D straight-linedistance propagation model can be used This is po-tentially more accurate Second the elevation of theshooter can be estimated The downside of 3D multilat-eration is that the additional degree of freedom allowedby three-dimensional multilateration can lead to less ac-curate 2D results if the sensor position matrix is poorlyconditioned eg the range of vertical elevations of re-porting sensors is small compared with the horizontalspacing between them With poorly-conditioned arrayssmall errors in the measurements of arrival time sensorposition or speed of sound may result in large changesin the shooterrsquos putative elevation
There are plausible use cases for detecting gunshotsabove ground level including locating shots fired fromthe upper floors of a structure and assisting in the classifi-cation of aerial fireworks Nevertheless the vast majorityof firearms are discharged at ground level so a practicalapproach is to do the bulk of pulse selection in two di-mensions and then refine the solution using a 3D modelwhen sufficient data are available
An approach that enables use of a 3D propagationmodel while avoiding the instability of a full 3D solutionis to constrain the shooter location to a two-dimensionalplane This ldquo25Drdquo method (Calhoun 2013) refines aninitial 2D solution by assuming the shooter is standingon the ground (or on the roof of a building) and con-structing R with a duplicate set of sensors with identicalarrival time but position reflected through the horizontalplane containing the shooter Figure 6 The method re-quires use of a digital elevation andor building modelto provide an estimate for zlowast the z-elevation of theshooter With ground plane normal to z each TDoAtuple (xi yi zi ti) in (4) is supplemented with a secondTDoA tuple (xi yi 2zlowastminuszi ti) This doubles the numberof columns in (4) and the number of rows in (5) but nochanges in algorithm are required The solution will beconstrained to elevation zlowast by the symmetry of the inputdata
F Weather Effects
Atmospheric conditions affect sound propagationand therefore the accuracy of an acoustic gunshot loca-tion system The speed of sound varies only slowly withtemperature and little with humidity or pressure so thedry air relationship for the speed of sound c may be usedwith acceptable accuracy This is
c = 2003radicT + 27315 m sminus1 (8)
where T is the temperature in CSound energy is transmitted as a compression wave
in a fluid a moving fluid carries the sound energy withit The multilateration routines of Section II D assumea stationary medium but the effects of a homogeneousmoving fluid can be incorporated by shifting the apparentposition of each sensor to account for air motion fromwhen the shot is fired to when it is detected With the
FIG 6 Method for constructing a sensor array through a
ground plane by reflection This permits use of elevation data
from the remote sensors while constraining the output to the
specified plane
z-axis component of wind vector ~v assumed to be zerothe wind-corrected position of the sensors is given by
[xprimeiyprimei
]=
[xiyi
]minus (ti minus tlowast)
[vxvy
](9)
where ti the arrival time at each sensor and vx and vyare the x- and yminuscomponents of the wind vector Thedischarge time tlowast is not known a priori but it can beestimated by subtracting an appropriate value from thearrival time at the first reporting sensor A suitable valueis the (historic) mean distance from the shooter to thefirst reporting sensor a value of 10 s is appropriate forarrays with sensor densities in the range of 2 sensorskm2
to 12 sensorskm2 The wind-correction process can berepeated with a more accurate value after initial compu-tation of discharge time tlowast
Other deleterious effects of wind are not so easilyhandled Wind increases the background noise detectedby outdoor microphones (Raspet et al 2006) an effectthat can be ameliorated but not entirely eliminated withproper windscreens (Hosier and Donavan 1979 Lin et al2014 Schomer et al 1990 Wuttke 1992) Wind noise re-duces the signal-to-noise ratio of gunshot impulses mak-ing them harder to detect Gradients in wind speed andtemperature with elevation refract the sound bendingit upwards in the upwind direction and downwards inthe downwind direction (Franke et al 1988 Wiener andKeast 1959 Wilson 2003) Upwind refraction createsa ldquoshadow zonerdquo where the gunshot signal is not de-tectable Because of the potential lack of participationfrom upwind sensors during windy conditions additionalsensors must be to deployed to enable successful mul-tilateration in all weather conditions The ShotSpottersystem does not otherwise compensate for the effects ofwind or temperature gradients
6 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
apparentposition
of sensor
wind
sensor
FIG 7 Adjustment of sensor positions to take homogeneous
fluid movement into account Energy is propagated from
source to sensor via a combination of bulk fluid flow and
acoustic propagation The effects of bulk fluid flow can be
incorporated by shifting the apparent position of the sensor
to the position that would have received the signal in the
absence of fluid flow
III SYSTEM DESIGN
A Array design
A typical deployment density is 2 sensorskm2 to12 sensorskm2 with the density dependent on the den-sity of structures and foliage in the covered area The lowend of this range is used in open areas where few struc-tures impede acoustic propagation such as anti-poachingdeployments higher sensor densities are used in areaswith a high density of structures high background noise(traffic rapid transit systems) difficult wind conditionsor unfamiliar environments Sensors are installed on el-evated locations such as rooftops and utility poles to in-crease the number of near line-of-sight audio paths andto minimize background noise Wind noise is mitigatedwith a 35 cm layer of open-cell foam around the micro-phones
B Sensor processing
All signal processing and pulse detection opera-tions are performed in the field on remotely-deployedsingle-board computers based on the Texas InstrumentsAM335x platform Sensor position is provided by a u-blox MAX 7 GPS chipset and the Linux system clockis disciplined using the PPS signal from the GPS Theu-blox MAX-7 series of GPS chipsets have a datasheetlocation accuracy of 25m (50 circular error probability(CEP)) and timepulse accuracy 30 n sec (RMS) Actualperformance depends on the satellite constellation visi-ble from the installed sensor position Because sensorsare rarely moved averaging over long periods of time isa feasible method for improving location precision Eachhour the mean position over the previous hour is storedand a long-term average position re-estimated based onvalues from up to 180 days of hourly records (Figure 8)with the multilateration calculations making use of thelong-term averages It is expected that the increasing
availability of high-accuracy real-time kinematic (RTK)GPS chipsets will reduce or eliminate the need for posi-tion averaging in future multilateration systems
frequ
ency
07
0
01
02
03
04
05
06
2D distance from centroid (m)15000 25 50 75 100 125
by hour
by minute
LTA
FIG 8 Horizontal GPS performance of a typical stationary
sensor showing the distance from the centroid of GPS mea-
surements sampled once per minute of the hourly averages
and of the long-term average of hourly values 50 CEP is
slightly worse than predicted by the datasheet but averag-
ing reduces the RMS distance from the centroid to less than
002 m
Audio sound pressure level is measured usingKingstate KECG2742WBL waterproof electret micro-phones and digitized using a Cirrus Logic WM8737analog-to-digital converter which samples 24-bit audiodata at 48 kHz Microphone sensitivity is minus42 plusmn 3 dBSPL giving a full-scale digital output of approximately93 dB SPL Network connectivity is provided by an on-board cellular data module
For performance reasons the pulse localization algo-rithm described in II B is implemented as a discrete-timealgorithm The digitized input stream is split up into2048-length chunks with 50 overlap so that a Hann win-dow can be applied without data loss After windowingdata is converted into the frequency domain for filter-ing and analysis A typical pulse localization response isshown in Figure 3
system σ (micros)
GPS timepulse 3 times 10minus2
Linux system clock 1 times 10minus3
Pulse start measurement 1 times 102
TABLE I Scale of contributions to pulse arrival time error
Pulse arrival time measurements are derived from au-dio synchronized to the GPS PPS timepulse As shownin Table I the timing errors associated with the GPSsystem are negligible compared with the uncertainty inpulse arrival time measurement The net effect of all
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 7
timing errors is estimated by running the pulse detec-tion algorithm on gunshot-like impulsive signals synchro-nized with GPS PPS This measurement takes into ac-count multiple sources of error The measured timingerror through the ShotSpotter sensors has a mean ofmicro = minus316 micros with a standard deviation of σ = 996 microswith a typical measurement shown in Figure 9 The pulsearrival time data provided and used for multilaterationin the current work are to millisecond precision
coun
ts
125
-100
20
40
60
80
100
microseconds750-1250 -1000 -800 -600 -400 -200 0 200 400 600
FIG 9 Pulse start timing measurements using simulated
gunshot impulses triggered by GPS timepulses
The audio processing code analyzes the first 250 msfollowing pulse arrival time to determine the likelihoodthat the impulse is due to a gunshot muzzle blast Mea-sured characteristics of the impulse include the integratedpower of the impulse the shape of its envelope and a nor-malized power spectrum These data are transmitted toa common endpoint for the multilateration computation
C Classification
The original 48 kHz data is discarded after pulse pro-cessing data downsampled to 12 kHz is cached on thesensor for 30 hours to support forensic analysis Follow-ing detection of a potential gunshot a 2-second subset ofdownsampled (12 kHz) FLAC-encoded audio is retrievedfrom the two closest sensors and used to build an imagemosaic (Figure 10) comprising features characteristic ofthe gunshot audio on each sensor and features character-istic of the incident as a whole A full description of imagemosaic construction is outside of the scope of the presentwork but the tiles comprising the image can be summa-rized as follows A) waveform image B) discrete waveletspectrogram of the de-noised waveform C) pulse time-of-arrival markers aligned using the shooter-sensor timedelay computed via multilateration D) discrete waveletspectrogram of the noise (complement of tile B above)E) wavelet transform of the first impulse F) waveformof the first impulse G) participating area as defined bythe Voronoi diagram of participating sensors H) locationof recent nearby incidents I) plots of various per-sensorparameters as a function of distance J) version-tracking
code K) time-of-date counters L) individual shot loca-tions M) power spectrum N O P) pulse feature coun-ters Q R) recent incident counters S) logo Discretewavelet transforms are performed using the biorthogonal22 wavelet and scaling functions
Classification of the mosaic images is performed us-ing the ResNet (He et al 2016) image classifier trainedusing field-collected data labelled by human reviewersEach mosaic image (one from the nearest sensor and onefrom the second-nearest) is classified independently theoutputs of the two classifiers are combined to minimizethe likelihood of false negatives In the vast majority ofcases ldquoground truthrdquo (eg shell casings video record-ings) is not available and it is to be expected that sometraining data are misidentified
A
BCDE
F G H I
J K L M N O P Q R S
FIG 10 The top image shows a typical mosaic image used for
machine classification with ResNet image classifier This ex-
ample is from a 9 mm firearm discharged at Firing Position 8
Each image used for classification is comprised of 19 individ-
ual tiles some tiles are derived from a 2-second subset of 12
kHz audio while others are derived from the characteristics
of the incident as a whole See text for tile descriptions
8 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Incidents classified as gunfire are pushed to the pub-lic safety agencyrsquos dispatch system andor mobile de-vices All of the pulse data associated with an inci-dent is stored in a database so that the measurementsmade by the remote sensor are available for later anal-ysis If a forensic report is requested (typically in thecourse of a criminal investigation) within 24 hours eightseconds of 12 kHz downsampled audio may be retrievedfrom sensors participating in the incident The down-sampled audio is invaluable for verifying that the pulseselection algorithms have grouped the input pulse datainto appropriate subsets for multilateration
D Weather Measurements
Reliable temperature data with a precision of plusmn1 Care available via NWS METAR readings from major air-ports measurements from Pittsburgh International Air-port (KPIT) and Allegheny County Airport (KAGC)were used in the present work Wind is highly depen-dent on local conditions and sensor mounting elevationso the airport values can provide only a rough estimateof local conditions but both airports reported negligiblewind of 0 m sminus1 to 5 m sminus1 during the live fire test so theeffects of wind were not investigated
IV DESCRIPTION OF LIVE FIRE TESTS
ShotSpotter sensor arrays are routinely tested priorto active use by law enforcement The live fire test ofthe ShotSpotter system examined here was conducted inPittsburgh PA by the Pittsburgh Bureau of Police inDecember 2018 Pittsburgh has mixture of hilly andflat terrain The regions covered by these tests primar-ily contain detached structures one to three stories inheight comparable to the scale of structures in manyother American cities Most sensors are installed onrooftops the major component of the variance in sen-sor elevation is due to the hilly terrain Several of thefiring positions were adjacent to institutional buildingsthat generated loud sharp echoes
Officers secured the target area prior to each test forsafety reasons Live rounds were discharged into a bul-let trap at distance asymp 3 m from the firearm Figure (11)All shots at a giving firing position were discharged withthe muzzle of the firearm pointed in the same directionwhich was not otherwise specified The survey locationof each firing position was determined by ShotSpotterpersonnel during the test using a smartphone applica-tion and qualitatively verified using aerial photographsavailable on Google Earth Survey error ε was not well-characterized during the test but typical performance ofsuch devices (which make use of signals from cellular andWiFi networks in addition to GPS) when used outdoorswith good sky view is on the order of ε = 25 m
Testing followed the standard firing sequence used byShotSpotter This comprises twelve shots (three singleshots and three groups of three shots) for each firing po-sition and tested weapon This test used three different
FIG 11 Firing Position 1 showing the shooter and bullet
trap illustrating the source of the signals used for the test
FP description NM n ε ρ
(m) (sensorskm2)
FP1 overpass ˜35 m above grade 3636 178 414 94
FP2 parking lot near top of hill 3636 143 520 114
FP3 intersection on high bluff 3636 99 349 75
FP4 intersection near top of hill 3636 138 476 94
FP5 playing field at head of valley 3336 116 221 85
FP6 playing field near top of hill 3636 136 554 85
FP7 playing field at end of valley 3636 149 788 124
FP8 intersection at bottom of valley 3636 112 218 99
FP9 parking lot on sloped region 3636 106 693 80
TABLE II Realtime performance at the nine firing positions
(FP) analyzed in present study Buildings at most sites com-
prised detached residential structures 1ndash3 stories in height
with some larger commercial residential and institutional
buildings Ratio NM is number of shots N detected out of
shots fired M n is mean participating sensor count per shot
survey error ε is the distance from the acoustically-determined
centroid to the survey location determined by smartphone-
assisted GPS Sensor density ρ is in sensorskm2 This is 2D
performance using the algorithm matching the most sensors
for each shot
handguns at each firing position (45 cal 40 cal 9 mm)The test sequence was repeated at each of nine firing po-sitions for a total of 162 tests comprising 324 shots Ageneral description of each firing position is given in Ta-ble II Temperature during the test was minus1 plusmn 1C withlight (0ndash2 ms) wind During the real-time tests thesystem detected 100 of incidents and located 969 ofincidents within a 25 m benchmark criterion The cumu-lative distribution function of survey error below 25 m for
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 9
Frac
tion
of in
cide
nts
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
FIG 12 Cumulative distribution function of survey error
during live-fire testings For live fire incidents 3-shot bursts
are detected and scored as a single incident
all tests is shown Figure 12 The real-time ShotSpottersystem bundles multiple closely-spaced shots into a singleincident so scoring is per-test rather than per-shot
Following each activation the system requests two-second samples of 12 kHz audio to facilitate machineclassification The results of the on-sensor pulse anal-ysis are stored in a database for later use Following thetest ShotSpotter personnel retrieved up to eight secondsof additional audio from selected sensors located within800 m of the firing position The range limit is in align-ment with the audio retrieval policy adopted by the com-pany when servicing forensic requests The present studylimits performance analysis to sensors located within an800 m radius of each firing position
Selected data from these tests are available as sup-plementary materials These materials include pulsedata (impulse arrival time signal-to-noise ratio acousticpower and sensor position) and up to six 12 kHz audiofiles for each test Courts of law routinely redact sensorlocations from trial records because of the risk of retal-iation against property owners accordingly the sensorlocations in the dataset are provided relative to an arbi-trary (and unpublished) origin that is different for eachfiring position
The pulse data include a record of impulsive soundstriggered during the time range around each test Theseinclude muzzle-blast sounds with near line-of-sight prop-agation paths that are useful for multilateration locationas well as multipath signals and other impulsive noisesources that are unrelated to the gunfire test ShotSpot-ter uses various pattern-matching and combinatorial con-sistency algorithms to pick sets of pulses suitable for mul-
tilateration While these routines are not revealed in thepresent work the output of the pulse selection algorithms(as tuples of pulses for each shot of each test) are pro-vided as supplementary materials
V ANALYSIS
A Multilateration Implementations
The nine firing positions (Table II) were re-analyzedoffline to evaluate the performance of the four 2D imple-mentations available (Reddi LeastSquares MLG andIDT) The input data were tuples of shortest acousticpath pulses within 800 m The mean number of partic-ipating sensors per shot ranged from 96 to 175 wellover the four needed for unambiguous 2D multilatera-tion Results by implementation are shown in Table IIIThe survey error ε is the two-dimensional distance fromthe acoustic multilateration centroid to the survey loca-tion determined by smartphone GPS σ1 and σ2 are thesquare roots of the eigenvalues of the two-dimensional co-variance matrix Two-dimensional distance is consideredthe appropriate error measure in a public safety context
All four routines solve the same mathematicalproblemmdashminimizing the difference between the pre-dicted and measured arrival times at the several sensorsassuming a straight-line propagation modelmdashso unsur-prisingly similar results are obtained from all four algo-rithms The Reddi implementation uses the first report-ing sensor as a reference which gives more weight to thenearest sensor than to all of the rest The LeastSquaresand related IDT routines yield good accuracy and stabil-ity but the LeastSquares requires an extra TDoA and theIDT routine has a running time roughly ten times longerthan Reddi or MLG for the same input data because itis iterative The MLG implementation requires only theminimum number of TDoAs for a solution does not ar-bitrarily overweight a single sensor works in two or threedimensions and also has the fastest running time sincethe computation required to set up R is simple and Rdagger
can be computed using SVD The MLG implementationwas used in the remainder of the study
B Effects of geometric constraint
While a ShotSpotter array in Californiarsquos CentralValley has a vertical range of just 10 m over its entire5 km extent the Pittsburgh array under study has sen-sor elevation change (comprising terrain plus buildingheight) of up to 160 m over 1 km This makes the arraysuitable for a study of the effect of geometric constrainton location accuracy
All incidents were relocated under the three geomet-ric constraints (2D 25D 3D) to quantify the effect ofincluding elevation data in the multilateration calcula-tion The system was permitted to use any algorithm inselecting pulse sets for multilateration the MLG algo-rithm was used for the final location computation Theresults (Table IV) show that 2D location results are very
10 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 7 Firing Position 8 Firing Position 9
FIG 13 Sensor positions shown relative to Firing Positions 1ndash9 which are located at the center of each plot The filled
circles show those sensors that participated in at least one shot the dashed ldquodetection limitrdquo is the convex hull of those sensors
reporting in at least 50 of shots
similar with no apparent improvement due to the use of3D straight-line distance as a propagation model
A possible explanation is that a shot fired at groundlevel makes one diffracted path at the nearest buildingand then travels above the roofline along a path well-approximated by the 2D straight-line distance 2D mul-tilateration is implicitly locating in the plane of the sen-sors so the system may be locating the best-fit location
of a point slightly above the shooter Because the 2Ddistances between sensors are so much larger than heightof typical sensors above ground the error introduced bythis process is small
These results suggest that the 2D geometric con-straint is appropriate for acoustic multilateration of gun-shots even in hilly terrain The resulting locations areof high accuracy with precision of a few meters even
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 11
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

lection of appropriate pulses for multilateration is an in-volved topic (Beck 2019 Calhoun 2011 Showen et al2008) and a full discussion of the methods used is out-side the scope of the present work To facilitate reviewof the present multilateration results the output of theShotSpotter pulse selection routines (comprising sets ofacceptably ldquonear line of sightrdquo pulses for each shot) areprovided as part of the supplemental materials alongwith sufficient audio data to verify that the selectedpulses are associated with the shortest acoustic path1Because the search for pulse sets is not exhaustive thetuples provided are not guaranteed to be an optimal sub-set for each test However all pulses in a tuple will havean error of less than 40 ms between the measured arrivaltime and the predictions of a straight-line propagationmodel
D Source Localization
Acoustic multilateration the location of a sourcefrom multiple time difference of arrivals (TDoAs) hasbeen in use since World War I when French (Aubin andGoldstein 2014) Canadian (Finan and Hurley 1997)and British forces (Van der Kloot 2005) used sound rang-ing to locate the source of artillery fire Many multilater-ation algorithms have been documented since that timeA multilateration solution in d dimensions requires atleast n = d + 1 reporting sensors Some n = d + 1solutions have two mathematically consistent solutionsAdditional methods not discussed in the present worksuch as measurements of angle-of-arrival (AoA) or re-ceived signal power are required to resolve ambiguoussolutions so the present work focuses on solutions forwhich n ge d + 2 for which the multilateration solutionis always unique given non-degenerate sensor placement
The TDoA source location problem reduces to find-ing the point of intersection of multiple hyperboloids sothe algorithms comprise variations on a common themeShotSpotter uses multiple algorithms because they ex-hibit different numerical stability and sensitivity to thechoice of a reference sensor Below we analyze the ac-curacy of four algorithms and three constraints under avariety of array densities to compare their relative per-formance under real-world test conditions A goal of thepresent work is to identify which algorithm is best-suitedfor forensic work All solutions discussed assume line-of-sight propagation in a homogeneous stationary medium
1 Reddi
This implementation is based on (Reddi 1993)With reference sensor at (0 0 0) and other sensors at(xi yi zi) i = 1 2 3 n source location (xlowast ylowast zlowast)can be found from relative arrival times ti by equatingthe squared distance from the reference to the source withthe square distance of the reference to the other sensors
cti = Si minusradicx2 + y2 + z2 (3)
1400
m
1400 m
FIG 4 Graphical representation of the intersecting hyper-
bola approach characteristic of Reddi algorithm The refer-
ence sensor that defines the time differences of arrival is the
first reporting sensor The sample data is from test 1 at Firing
Position 4
for i = (1 2 n) where
S2i = (xminus xi)2 + (y minus yi)2 + (z minus zi)2
This reduces to a quadratic equation that can be solvedfor source location (xlowast ylowast zlowast) Discharge time tlowast is ob-tained from the mean value of ti minus Sic at (xlowast ylowast zlowast)This implementation requires a minimum of d+1 TDoAswhere d is the number of dimensions
2 MLG
(Mathias et al 2008) avoid use of a reference sen-sor by minimizing the squared error on each sensorShotSpotterrsquos ldquoMLGrdquo implementation slightly modifiesthis algorithm by solving for time-distance (ct) insteadof t which improves computational stability For thesimplified case of overdetermined systems (n gt d + 1)with receiver matrix
R =
x0 x1 xiy0 y1 yiz0 z1 ziminusct0 minusct1 minusctiminusc2 minusc2 minusc2
(4)
4 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
the solution vector is given byx
y
z
ct
vc
=1
2Rdagger
x20 + y20 + z20 minus (ct0)2
x21 + y21 + z21 minus (ct1)2
x2i + y2i + z2i minus (cti)2
(5)
where v is an error term and Rdagger is the pseudoinverse ofR See (Mathias et al 2008) for handling of the fullydetermined case (n = d+ 1) and for a quantification oferror propagation in multilateration
3 LeastSquares
The ldquoLeastSquaresrdquo implementation is another least-squares minimizer based on time difference of arrivalsbetween pairs of sensors Equating the squares of the dis-tance and the time-distance gives one equation for eachsensor i
(xi minus x)2 + (yi minus y)2 + (zi minus z)2 = (cti minus ct)2 (6)
Subtracting the ith equation from the (i+ 1)-st elimi-nates quadratic terms Define Xi to be the differencebetween the LHS (distance) and RHS (time-distance) ofthe ith difference equation When
χ2 =
nminus1sumi=1
X2i
the minimum value of χ2 is the point at which
partχ2
partx=partχ2
party=partχ2
partz=partχ2
partct= 0
This gives a linear system in d+ 1 variablesaiai aibi aici aidibiai bibi bici bidiciai cibi cici cididiai dibi dici didi
x
y
z
ct
=
aieibieicieidiei
(7)
where
ai = (xi+1 minus xi)bi = (yi+1 minus yi)ci = (zi+1 minus zi)di = minusc(ti+1 minus ti) and
ei =1
2(x2i+1 + y2i+1 + z2i+1 + c2t2i minus x2i minus y2i minus z2i minus c2t2i+1)
This requires an additional TDoA compared with theReddi and MLG implementations
4 Iterative Discharge Time
Combustion of the propellant used firearms gener-ates an optical signal known as the muzzle flash that
1400
m
1400 m
FIG 5 Graphical representation of the intersecting circle ap-
proach characteristic of Iterative Discharge Time algorithm
The sample data is from test 1 at Firing Position 4
is strongest in the medium-wave IR region (Pauli et al2004) If the discharge time tlowast is known from muzzle flashtiming (6) reduces to finding the point of intersection ofcircles (or spheres) of known radius c(ti minus tlowast) This is asimplified version of (7)
When no muzzle flash time is available the dis-charge time can be determined iteratively The ldquoIter-ative Discharge Timerdquo (IDT) implementation uses sim-plex gradient descent to find tlowast based on starting value oftlowast = t0 minus 10 where t0 is the arrival time on the nearest(earliest) sensor and the constant roughly equal to themean distance between a shooter and the first reportingsensor The main advantage over pure TDoA algorithmsis that the range can be bounded which is helpful whenlocating sources outside the sensor array An additionalbenefit of all intersecting circle solutions in a forensic con-text is that the location tuple obtained (xlowast ylowast tlowast) canreadily be checked using the standard tools of plane ge-ometry a ruler and a compass A graphical representa-tion of an intersecting circles solution is shown in Figure5
E Geometric Constraints
Acoustic multilateration can be done in two or threedimensions For two-dimensional multilateration thesensor positions are projected against a plane and themultilateration solution returned is computed in thisplane At least three TDoAs are required For three-dimensional multilateration the sensor elevation data isused without modification and the multilateration solu-tion computed in three-dimensional space Four TDoAsare required for multilateration in three dimensions
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 5
There are two potential advantages of three-dimensional multilateration First a 3D straight-linedistance propagation model can be used This is po-tentially more accurate Second the elevation of theshooter can be estimated The downside of 3D multilat-eration is that the additional degree of freedom allowedby three-dimensional multilateration can lead to less ac-curate 2D results if the sensor position matrix is poorlyconditioned eg the range of vertical elevations of re-porting sensors is small compared with the horizontalspacing between them With poorly-conditioned arrayssmall errors in the measurements of arrival time sensorposition or speed of sound may result in large changesin the shooterrsquos putative elevation
There are plausible use cases for detecting gunshotsabove ground level including locating shots fired fromthe upper floors of a structure and assisting in the classifi-cation of aerial fireworks Nevertheless the vast majorityof firearms are discharged at ground level so a practicalapproach is to do the bulk of pulse selection in two di-mensions and then refine the solution using a 3D modelwhen sufficient data are available
An approach that enables use of a 3D propagationmodel while avoiding the instability of a full 3D solutionis to constrain the shooter location to a two-dimensionalplane This ldquo25Drdquo method (Calhoun 2013) refines aninitial 2D solution by assuming the shooter is standingon the ground (or on the roof of a building) and con-structing R with a duplicate set of sensors with identicalarrival time but position reflected through the horizontalplane containing the shooter Figure 6 The method re-quires use of a digital elevation andor building modelto provide an estimate for zlowast the z-elevation of theshooter With ground plane normal to z each TDoAtuple (xi yi zi ti) in (4) is supplemented with a secondTDoA tuple (xi yi 2zlowastminuszi ti) This doubles the numberof columns in (4) and the number of rows in (5) but nochanges in algorithm are required The solution will beconstrained to elevation zlowast by the symmetry of the inputdata
F Weather Effects
Atmospheric conditions affect sound propagationand therefore the accuracy of an acoustic gunshot loca-tion system The speed of sound varies only slowly withtemperature and little with humidity or pressure so thedry air relationship for the speed of sound c may be usedwith acceptable accuracy This is
c = 2003radicT + 27315 m sminus1 (8)
where T is the temperature in CSound energy is transmitted as a compression wave
in a fluid a moving fluid carries the sound energy withit The multilateration routines of Section II D assumea stationary medium but the effects of a homogeneousmoving fluid can be incorporated by shifting the apparentposition of each sensor to account for air motion fromwhen the shot is fired to when it is detected With the
FIG 6 Method for constructing a sensor array through a
ground plane by reflection This permits use of elevation data
from the remote sensors while constraining the output to the
specified plane
z-axis component of wind vector ~v assumed to be zerothe wind-corrected position of the sensors is given by
[xprimeiyprimei
]=
[xiyi
]minus (ti minus tlowast)
[vxvy
](9)
where ti the arrival time at each sensor and vx and vyare the x- and yminuscomponents of the wind vector Thedischarge time tlowast is not known a priori but it can beestimated by subtracting an appropriate value from thearrival time at the first reporting sensor A suitable valueis the (historic) mean distance from the shooter to thefirst reporting sensor a value of 10 s is appropriate forarrays with sensor densities in the range of 2 sensorskm2
to 12 sensorskm2 The wind-correction process can berepeated with a more accurate value after initial compu-tation of discharge time tlowast
Other deleterious effects of wind are not so easilyhandled Wind increases the background noise detectedby outdoor microphones (Raspet et al 2006) an effectthat can be ameliorated but not entirely eliminated withproper windscreens (Hosier and Donavan 1979 Lin et al2014 Schomer et al 1990 Wuttke 1992) Wind noise re-duces the signal-to-noise ratio of gunshot impulses mak-ing them harder to detect Gradients in wind speed andtemperature with elevation refract the sound bendingit upwards in the upwind direction and downwards inthe downwind direction (Franke et al 1988 Wiener andKeast 1959 Wilson 2003) Upwind refraction createsa ldquoshadow zonerdquo where the gunshot signal is not de-tectable Because of the potential lack of participationfrom upwind sensors during windy conditions additionalsensors must be to deployed to enable successful mul-tilateration in all weather conditions The ShotSpottersystem does not otherwise compensate for the effects ofwind or temperature gradients
6 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
apparentposition
of sensor
wind
sensor
FIG 7 Adjustment of sensor positions to take homogeneous
fluid movement into account Energy is propagated from
source to sensor via a combination of bulk fluid flow and
acoustic propagation The effects of bulk fluid flow can be
incorporated by shifting the apparent position of the sensor
to the position that would have received the signal in the
absence of fluid flow
III SYSTEM DESIGN
A Array design
A typical deployment density is 2 sensorskm2 to12 sensorskm2 with the density dependent on the den-sity of structures and foliage in the covered area The lowend of this range is used in open areas where few struc-tures impede acoustic propagation such as anti-poachingdeployments higher sensor densities are used in areaswith a high density of structures high background noise(traffic rapid transit systems) difficult wind conditionsor unfamiliar environments Sensors are installed on el-evated locations such as rooftops and utility poles to in-crease the number of near line-of-sight audio paths andto minimize background noise Wind noise is mitigatedwith a 35 cm layer of open-cell foam around the micro-phones
B Sensor processing
All signal processing and pulse detection opera-tions are performed in the field on remotely-deployedsingle-board computers based on the Texas InstrumentsAM335x platform Sensor position is provided by a u-blox MAX 7 GPS chipset and the Linux system clockis disciplined using the PPS signal from the GPS Theu-blox MAX-7 series of GPS chipsets have a datasheetlocation accuracy of 25m (50 circular error probability(CEP)) and timepulse accuracy 30 n sec (RMS) Actualperformance depends on the satellite constellation visi-ble from the installed sensor position Because sensorsare rarely moved averaging over long periods of time isa feasible method for improving location precision Eachhour the mean position over the previous hour is storedand a long-term average position re-estimated based onvalues from up to 180 days of hourly records (Figure 8)with the multilateration calculations making use of thelong-term averages It is expected that the increasing
availability of high-accuracy real-time kinematic (RTK)GPS chipsets will reduce or eliminate the need for posi-tion averaging in future multilateration systems
frequ
ency
07
0
01
02
03
04
05
06
2D distance from centroid (m)15000 25 50 75 100 125
by hour
by minute
LTA
FIG 8 Horizontal GPS performance of a typical stationary
sensor showing the distance from the centroid of GPS mea-
surements sampled once per minute of the hourly averages
and of the long-term average of hourly values 50 CEP is
slightly worse than predicted by the datasheet but averag-
ing reduces the RMS distance from the centroid to less than
002 m
Audio sound pressure level is measured usingKingstate KECG2742WBL waterproof electret micro-phones and digitized using a Cirrus Logic WM8737analog-to-digital converter which samples 24-bit audiodata at 48 kHz Microphone sensitivity is minus42 plusmn 3 dBSPL giving a full-scale digital output of approximately93 dB SPL Network connectivity is provided by an on-board cellular data module
For performance reasons the pulse localization algo-rithm described in II B is implemented as a discrete-timealgorithm The digitized input stream is split up into2048-length chunks with 50 overlap so that a Hann win-dow can be applied without data loss After windowingdata is converted into the frequency domain for filter-ing and analysis A typical pulse localization response isshown in Figure 3
system σ (micros)
GPS timepulse 3 times 10minus2
Linux system clock 1 times 10minus3
Pulse start measurement 1 times 102
TABLE I Scale of contributions to pulse arrival time error
Pulse arrival time measurements are derived from au-dio synchronized to the GPS PPS timepulse As shownin Table I the timing errors associated with the GPSsystem are negligible compared with the uncertainty inpulse arrival time measurement The net effect of all
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 7
timing errors is estimated by running the pulse detec-tion algorithm on gunshot-like impulsive signals synchro-nized with GPS PPS This measurement takes into ac-count multiple sources of error The measured timingerror through the ShotSpotter sensors has a mean ofmicro = minus316 micros with a standard deviation of σ = 996 microswith a typical measurement shown in Figure 9 The pulsearrival time data provided and used for multilaterationin the current work are to millisecond precision
coun
ts
125
-100
20
40
60
80
100
microseconds750-1250 -1000 -800 -600 -400 -200 0 200 400 600
FIG 9 Pulse start timing measurements using simulated
gunshot impulses triggered by GPS timepulses
The audio processing code analyzes the first 250 msfollowing pulse arrival time to determine the likelihoodthat the impulse is due to a gunshot muzzle blast Mea-sured characteristics of the impulse include the integratedpower of the impulse the shape of its envelope and a nor-malized power spectrum These data are transmitted toa common endpoint for the multilateration computation
C Classification
The original 48 kHz data is discarded after pulse pro-cessing data downsampled to 12 kHz is cached on thesensor for 30 hours to support forensic analysis Follow-ing detection of a potential gunshot a 2-second subset ofdownsampled (12 kHz) FLAC-encoded audio is retrievedfrom the two closest sensors and used to build an imagemosaic (Figure 10) comprising features characteristic ofthe gunshot audio on each sensor and features character-istic of the incident as a whole A full description of imagemosaic construction is outside of the scope of the presentwork but the tiles comprising the image can be summa-rized as follows A) waveform image B) discrete waveletspectrogram of the de-noised waveform C) pulse time-of-arrival markers aligned using the shooter-sensor timedelay computed via multilateration D) discrete waveletspectrogram of the noise (complement of tile B above)E) wavelet transform of the first impulse F) waveformof the first impulse G) participating area as defined bythe Voronoi diagram of participating sensors H) locationof recent nearby incidents I) plots of various per-sensorparameters as a function of distance J) version-tracking
code K) time-of-date counters L) individual shot loca-tions M) power spectrum N O P) pulse feature coun-ters Q R) recent incident counters S) logo Discretewavelet transforms are performed using the biorthogonal22 wavelet and scaling functions
Classification of the mosaic images is performed us-ing the ResNet (He et al 2016) image classifier trainedusing field-collected data labelled by human reviewersEach mosaic image (one from the nearest sensor and onefrom the second-nearest) is classified independently theoutputs of the two classifiers are combined to minimizethe likelihood of false negatives In the vast majority ofcases ldquoground truthrdquo (eg shell casings video record-ings) is not available and it is to be expected that sometraining data are misidentified
A
BCDE
F G H I
J K L M N O P Q R S
FIG 10 The top image shows a typical mosaic image used for
machine classification with ResNet image classifier This ex-
ample is from a 9 mm firearm discharged at Firing Position 8
Each image used for classification is comprised of 19 individ-
ual tiles some tiles are derived from a 2-second subset of 12
kHz audio while others are derived from the characteristics
of the incident as a whole See text for tile descriptions
8 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Incidents classified as gunfire are pushed to the pub-lic safety agencyrsquos dispatch system andor mobile de-vices All of the pulse data associated with an inci-dent is stored in a database so that the measurementsmade by the remote sensor are available for later anal-ysis If a forensic report is requested (typically in thecourse of a criminal investigation) within 24 hours eightseconds of 12 kHz downsampled audio may be retrievedfrom sensors participating in the incident The down-sampled audio is invaluable for verifying that the pulseselection algorithms have grouped the input pulse datainto appropriate subsets for multilateration
D Weather Measurements
Reliable temperature data with a precision of plusmn1 Care available via NWS METAR readings from major air-ports measurements from Pittsburgh International Air-port (KPIT) and Allegheny County Airport (KAGC)were used in the present work Wind is highly depen-dent on local conditions and sensor mounting elevationso the airport values can provide only a rough estimateof local conditions but both airports reported negligiblewind of 0 m sminus1 to 5 m sminus1 during the live fire test so theeffects of wind were not investigated
IV DESCRIPTION OF LIVE FIRE TESTS
ShotSpotter sensor arrays are routinely tested priorto active use by law enforcement The live fire test ofthe ShotSpotter system examined here was conducted inPittsburgh PA by the Pittsburgh Bureau of Police inDecember 2018 Pittsburgh has mixture of hilly andflat terrain The regions covered by these tests primar-ily contain detached structures one to three stories inheight comparable to the scale of structures in manyother American cities Most sensors are installed onrooftops the major component of the variance in sen-sor elevation is due to the hilly terrain Several of thefiring positions were adjacent to institutional buildingsthat generated loud sharp echoes
Officers secured the target area prior to each test forsafety reasons Live rounds were discharged into a bul-let trap at distance asymp 3 m from the firearm Figure (11)All shots at a giving firing position were discharged withthe muzzle of the firearm pointed in the same directionwhich was not otherwise specified The survey locationof each firing position was determined by ShotSpotterpersonnel during the test using a smartphone applica-tion and qualitatively verified using aerial photographsavailable on Google Earth Survey error ε was not well-characterized during the test but typical performance ofsuch devices (which make use of signals from cellular andWiFi networks in addition to GPS) when used outdoorswith good sky view is on the order of ε = 25 m
Testing followed the standard firing sequence used byShotSpotter This comprises twelve shots (three singleshots and three groups of three shots) for each firing po-sition and tested weapon This test used three different
FIG 11 Firing Position 1 showing the shooter and bullet
trap illustrating the source of the signals used for the test
FP description NM n ε ρ
(m) (sensorskm2)
FP1 overpass ˜35 m above grade 3636 178 414 94
FP2 parking lot near top of hill 3636 143 520 114
FP3 intersection on high bluff 3636 99 349 75
FP4 intersection near top of hill 3636 138 476 94
FP5 playing field at head of valley 3336 116 221 85
FP6 playing field near top of hill 3636 136 554 85
FP7 playing field at end of valley 3636 149 788 124
FP8 intersection at bottom of valley 3636 112 218 99
FP9 parking lot on sloped region 3636 106 693 80
TABLE II Realtime performance at the nine firing positions
(FP) analyzed in present study Buildings at most sites com-
prised detached residential structures 1ndash3 stories in height
with some larger commercial residential and institutional
buildings Ratio NM is number of shots N detected out of
shots fired M n is mean participating sensor count per shot
survey error ε is the distance from the acoustically-determined
centroid to the survey location determined by smartphone-
assisted GPS Sensor density ρ is in sensorskm2 This is 2D
performance using the algorithm matching the most sensors
for each shot
handguns at each firing position (45 cal 40 cal 9 mm)The test sequence was repeated at each of nine firing po-sitions for a total of 162 tests comprising 324 shots Ageneral description of each firing position is given in Ta-ble II Temperature during the test was minus1 plusmn 1C withlight (0ndash2 ms) wind During the real-time tests thesystem detected 100 of incidents and located 969 ofincidents within a 25 m benchmark criterion The cumu-lative distribution function of survey error below 25 m for
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 9
Frac
tion
of in
cide
nts
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
FIG 12 Cumulative distribution function of survey error
during live-fire testings For live fire incidents 3-shot bursts
are detected and scored as a single incident
all tests is shown Figure 12 The real-time ShotSpottersystem bundles multiple closely-spaced shots into a singleincident so scoring is per-test rather than per-shot
Following each activation the system requests two-second samples of 12 kHz audio to facilitate machineclassification The results of the on-sensor pulse anal-ysis are stored in a database for later use Following thetest ShotSpotter personnel retrieved up to eight secondsof additional audio from selected sensors located within800 m of the firing position The range limit is in align-ment with the audio retrieval policy adopted by the com-pany when servicing forensic requests The present studylimits performance analysis to sensors located within an800 m radius of each firing position
Selected data from these tests are available as sup-plementary materials These materials include pulsedata (impulse arrival time signal-to-noise ratio acousticpower and sensor position) and up to six 12 kHz audiofiles for each test Courts of law routinely redact sensorlocations from trial records because of the risk of retal-iation against property owners accordingly the sensorlocations in the dataset are provided relative to an arbi-trary (and unpublished) origin that is different for eachfiring position
The pulse data include a record of impulsive soundstriggered during the time range around each test Theseinclude muzzle-blast sounds with near line-of-sight prop-agation paths that are useful for multilateration locationas well as multipath signals and other impulsive noisesources that are unrelated to the gunfire test ShotSpot-ter uses various pattern-matching and combinatorial con-sistency algorithms to pick sets of pulses suitable for mul-
tilateration While these routines are not revealed in thepresent work the output of the pulse selection algorithms(as tuples of pulses for each shot of each test) are pro-vided as supplementary materials
V ANALYSIS
A Multilateration Implementations
The nine firing positions (Table II) were re-analyzedoffline to evaluate the performance of the four 2D imple-mentations available (Reddi LeastSquares MLG andIDT) The input data were tuples of shortest acousticpath pulses within 800 m The mean number of partic-ipating sensors per shot ranged from 96 to 175 wellover the four needed for unambiguous 2D multilatera-tion Results by implementation are shown in Table IIIThe survey error ε is the two-dimensional distance fromthe acoustic multilateration centroid to the survey loca-tion determined by smartphone GPS σ1 and σ2 are thesquare roots of the eigenvalues of the two-dimensional co-variance matrix Two-dimensional distance is consideredthe appropriate error measure in a public safety context
All four routines solve the same mathematicalproblemmdashminimizing the difference between the pre-dicted and measured arrival times at the several sensorsassuming a straight-line propagation modelmdashso unsur-prisingly similar results are obtained from all four algo-rithms The Reddi implementation uses the first report-ing sensor as a reference which gives more weight to thenearest sensor than to all of the rest The LeastSquaresand related IDT routines yield good accuracy and stabil-ity but the LeastSquares requires an extra TDoA and theIDT routine has a running time roughly ten times longerthan Reddi or MLG for the same input data because itis iterative The MLG implementation requires only theminimum number of TDoAs for a solution does not ar-bitrarily overweight a single sensor works in two or threedimensions and also has the fastest running time sincethe computation required to set up R is simple and Rdagger
can be computed using SVD The MLG implementationwas used in the remainder of the study
B Effects of geometric constraint
While a ShotSpotter array in Californiarsquos CentralValley has a vertical range of just 10 m over its entire5 km extent the Pittsburgh array under study has sen-sor elevation change (comprising terrain plus buildingheight) of up to 160 m over 1 km This makes the arraysuitable for a study of the effect of geometric constrainton location accuracy
All incidents were relocated under the three geomet-ric constraints (2D 25D 3D) to quantify the effect ofincluding elevation data in the multilateration calcula-tion The system was permitted to use any algorithm inselecting pulse sets for multilateration the MLG algo-rithm was used for the final location computation Theresults (Table IV) show that 2D location results are very
10 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 7 Firing Position 8 Firing Position 9
FIG 13 Sensor positions shown relative to Firing Positions 1ndash9 which are located at the center of each plot The filled
circles show those sensors that participated in at least one shot the dashed ldquodetection limitrdquo is the convex hull of those sensors
reporting in at least 50 of shots
similar with no apparent improvement due to the use of3D straight-line distance as a propagation model
A possible explanation is that a shot fired at groundlevel makes one diffracted path at the nearest buildingand then travels above the roofline along a path well-approximated by the 2D straight-line distance 2D mul-tilateration is implicitly locating in the plane of the sen-sors so the system may be locating the best-fit location
of a point slightly above the shooter Because the 2Ddistances between sensors are so much larger than heightof typical sensors above ground the error introduced bythis process is small
These results suggest that the 2D geometric con-straint is appropriate for acoustic multilateration of gun-shots even in hilly terrain The resulting locations areof high accuracy with precision of a few meters even
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 11
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

the solution vector is given byx
y
z
ct
vc
=1
2Rdagger
x20 + y20 + z20 minus (ct0)2
x21 + y21 + z21 minus (ct1)2
x2i + y2i + z2i minus (cti)2
(5)
where v is an error term and Rdagger is the pseudoinverse ofR See (Mathias et al 2008) for handling of the fullydetermined case (n = d+ 1) and for a quantification oferror propagation in multilateration
3 LeastSquares
The ldquoLeastSquaresrdquo implementation is another least-squares minimizer based on time difference of arrivalsbetween pairs of sensors Equating the squares of the dis-tance and the time-distance gives one equation for eachsensor i
(xi minus x)2 + (yi minus y)2 + (zi minus z)2 = (cti minus ct)2 (6)
Subtracting the ith equation from the (i+ 1)-st elimi-nates quadratic terms Define Xi to be the differencebetween the LHS (distance) and RHS (time-distance) ofthe ith difference equation When
χ2 =
nminus1sumi=1
X2i
the minimum value of χ2 is the point at which
partχ2
partx=partχ2
party=partχ2
partz=partχ2
partct= 0
This gives a linear system in d+ 1 variablesaiai aibi aici aidibiai bibi bici bidiciai cibi cici cididiai dibi dici didi
x
y
z
ct
=
aieibieicieidiei
(7)
where
ai = (xi+1 minus xi)bi = (yi+1 minus yi)ci = (zi+1 minus zi)di = minusc(ti+1 minus ti) and
ei =1
2(x2i+1 + y2i+1 + z2i+1 + c2t2i minus x2i minus y2i minus z2i minus c2t2i+1)
This requires an additional TDoA compared with theReddi and MLG implementations
4 Iterative Discharge Time
Combustion of the propellant used firearms gener-ates an optical signal known as the muzzle flash that
1400
m
1400 m
FIG 5 Graphical representation of the intersecting circle ap-
proach characteristic of Iterative Discharge Time algorithm
The sample data is from test 1 at Firing Position 4
is strongest in the medium-wave IR region (Pauli et al2004) If the discharge time tlowast is known from muzzle flashtiming (6) reduces to finding the point of intersection ofcircles (or spheres) of known radius c(ti minus tlowast) This is asimplified version of (7)
When no muzzle flash time is available the dis-charge time can be determined iteratively The ldquoIter-ative Discharge Timerdquo (IDT) implementation uses sim-plex gradient descent to find tlowast based on starting value oftlowast = t0 minus 10 where t0 is the arrival time on the nearest(earliest) sensor and the constant roughly equal to themean distance between a shooter and the first reportingsensor The main advantage over pure TDoA algorithmsis that the range can be bounded which is helpful whenlocating sources outside the sensor array An additionalbenefit of all intersecting circle solutions in a forensic con-text is that the location tuple obtained (xlowast ylowast tlowast) canreadily be checked using the standard tools of plane ge-ometry a ruler and a compass A graphical representa-tion of an intersecting circles solution is shown in Figure5
E Geometric Constraints
Acoustic multilateration can be done in two or threedimensions For two-dimensional multilateration thesensor positions are projected against a plane and themultilateration solution returned is computed in thisplane At least three TDoAs are required For three-dimensional multilateration the sensor elevation data isused without modification and the multilateration solu-tion computed in three-dimensional space Four TDoAsare required for multilateration in three dimensions
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 5
There are two potential advantages of three-dimensional multilateration First a 3D straight-linedistance propagation model can be used This is po-tentially more accurate Second the elevation of theshooter can be estimated The downside of 3D multilat-eration is that the additional degree of freedom allowedby three-dimensional multilateration can lead to less ac-curate 2D results if the sensor position matrix is poorlyconditioned eg the range of vertical elevations of re-porting sensors is small compared with the horizontalspacing between them With poorly-conditioned arrayssmall errors in the measurements of arrival time sensorposition or speed of sound may result in large changesin the shooterrsquos putative elevation
There are plausible use cases for detecting gunshotsabove ground level including locating shots fired fromthe upper floors of a structure and assisting in the classifi-cation of aerial fireworks Nevertheless the vast majorityof firearms are discharged at ground level so a practicalapproach is to do the bulk of pulse selection in two di-mensions and then refine the solution using a 3D modelwhen sufficient data are available
An approach that enables use of a 3D propagationmodel while avoiding the instability of a full 3D solutionis to constrain the shooter location to a two-dimensionalplane This ldquo25Drdquo method (Calhoun 2013) refines aninitial 2D solution by assuming the shooter is standingon the ground (or on the roof of a building) and con-structing R with a duplicate set of sensors with identicalarrival time but position reflected through the horizontalplane containing the shooter Figure 6 The method re-quires use of a digital elevation andor building modelto provide an estimate for zlowast the z-elevation of theshooter With ground plane normal to z each TDoAtuple (xi yi zi ti) in (4) is supplemented with a secondTDoA tuple (xi yi 2zlowastminuszi ti) This doubles the numberof columns in (4) and the number of rows in (5) but nochanges in algorithm are required The solution will beconstrained to elevation zlowast by the symmetry of the inputdata
F Weather Effects
Atmospheric conditions affect sound propagationand therefore the accuracy of an acoustic gunshot loca-tion system The speed of sound varies only slowly withtemperature and little with humidity or pressure so thedry air relationship for the speed of sound c may be usedwith acceptable accuracy This is
c = 2003radicT + 27315 m sminus1 (8)
where T is the temperature in CSound energy is transmitted as a compression wave
in a fluid a moving fluid carries the sound energy withit The multilateration routines of Section II D assumea stationary medium but the effects of a homogeneousmoving fluid can be incorporated by shifting the apparentposition of each sensor to account for air motion fromwhen the shot is fired to when it is detected With the
FIG 6 Method for constructing a sensor array through a
ground plane by reflection This permits use of elevation data
from the remote sensors while constraining the output to the
specified plane
z-axis component of wind vector ~v assumed to be zerothe wind-corrected position of the sensors is given by
[xprimeiyprimei
]=
[xiyi
]minus (ti minus tlowast)
[vxvy
](9)
where ti the arrival time at each sensor and vx and vyare the x- and yminuscomponents of the wind vector Thedischarge time tlowast is not known a priori but it can beestimated by subtracting an appropriate value from thearrival time at the first reporting sensor A suitable valueis the (historic) mean distance from the shooter to thefirst reporting sensor a value of 10 s is appropriate forarrays with sensor densities in the range of 2 sensorskm2
to 12 sensorskm2 The wind-correction process can berepeated with a more accurate value after initial compu-tation of discharge time tlowast
Other deleterious effects of wind are not so easilyhandled Wind increases the background noise detectedby outdoor microphones (Raspet et al 2006) an effectthat can be ameliorated but not entirely eliminated withproper windscreens (Hosier and Donavan 1979 Lin et al2014 Schomer et al 1990 Wuttke 1992) Wind noise re-duces the signal-to-noise ratio of gunshot impulses mak-ing them harder to detect Gradients in wind speed andtemperature with elevation refract the sound bendingit upwards in the upwind direction and downwards inthe downwind direction (Franke et al 1988 Wiener andKeast 1959 Wilson 2003) Upwind refraction createsa ldquoshadow zonerdquo where the gunshot signal is not de-tectable Because of the potential lack of participationfrom upwind sensors during windy conditions additionalsensors must be to deployed to enable successful mul-tilateration in all weather conditions The ShotSpottersystem does not otherwise compensate for the effects ofwind or temperature gradients
6 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
apparentposition
of sensor
wind
sensor
FIG 7 Adjustment of sensor positions to take homogeneous
fluid movement into account Energy is propagated from
source to sensor via a combination of bulk fluid flow and
acoustic propagation The effects of bulk fluid flow can be
incorporated by shifting the apparent position of the sensor
to the position that would have received the signal in the
absence of fluid flow
III SYSTEM DESIGN
A Array design
A typical deployment density is 2 sensorskm2 to12 sensorskm2 with the density dependent on the den-sity of structures and foliage in the covered area The lowend of this range is used in open areas where few struc-tures impede acoustic propagation such as anti-poachingdeployments higher sensor densities are used in areaswith a high density of structures high background noise(traffic rapid transit systems) difficult wind conditionsor unfamiliar environments Sensors are installed on el-evated locations such as rooftops and utility poles to in-crease the number of near line-of-sight audio paths andto minimize background noise Wind noise is mitigatedwith a 35 cm layer of open-cell foam around the micro-phones
B Sensor processing
All signal processing and pulse detection opera-tions are performed in the field on remotely-deployedsingle-board computers based on the Texas InstrumentsAM335x platform Sensor position is provided by a u-blox MAX 7 GPS chipset and the Linux system clockis disciplined using the PPS signal from the GPS Theu-blox MAX-7 series of GPS chipsets have a datasheetlocation accuracy of 25m (50 circular error probability(CEP)) and timepulse accuracy 30 n sec (RMS) Actualperformance depends on the satellite constellation visi-ble from the installed sensor position Because sensorsare rarely moved averaging over long periods of time isa feasible method for improving location precision Eachhour the mean position over the previous hour is storedand a long-term average position re-estimated based onvalues from up to 180 days of hourly records (Figure 8)with the multilateration calculations making use of thelong-term averages It is expected that the increasing
availability of high-accuracy real-time kinematic (RTK)GPS chipsets will reduce or eliminate the need for posi-tion averaging in future multilateration systems
frequ
ency
07
0
01
02
03
04
05
06
2D distance from centroid (m)15000 25 50 75 100 125
by hour
by minute
LTA
FIG 8 Horizontal GPS performance of a typical stationary
sensor showing the distance from the centroid of GPS mea-
surements sampled once per minute of the hourly averages
and of the long-term average of hourly values 50 CEP is
slightly worse than predicted by the datasheet but averag-
ing reduces the RMS distance from the centroid to less than
002 m
Audio sound pressure level is measured usingKingstate KECG2742WBL waterproof electret micro-phones and digitized using a Cirrus Logic WM8737analog-to-digital converter which samples 24-bit audiodata at 48 kHz Microphone sensitivity is minus42 plusmn 3 dBSPL giving a full-scale digital output of approximately93 dB SPL Network connectivity is provided by an on-board cellular data module
For performance reasons the pulse localization algo-rithm described in II B is implemented as a discrete-timealgorithm The digitized input stream is split up into2048-length chunks with 50 overlap so that a Hann win-dow can be applied without data loss After windowingdata is converted into the frequency domain for filter-ing and analysis A typical pulse localization response isshown in Figure 3
system σ (micros)
GPS timepulse 3 times 10minus2
Linux system clock 1 times 10minus3
Pulse start measurement 1 times 102
TABLE I Scale of contributions to pulse arrival time error
Pulse arrival time measurements are derived from au-dio synchronized to the GPS PPS timepulse As shownin Table I the timing errors associated with the GPSsystem are negligible compared with the uncertainty inpulse arrival time measurement The net effect of all
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 7
timing errors is estimated by running the pulse detec-tion algorithm on gunshot-like impulsive signals synchro-nized with GPS PPS This measurement takes into ac-count multiple sources of error The measured timingerror through the ShotSpotter sensors has a mean ofmicro = minus316 micros with a standard deviation of σ = 996 microswith a typical measurement shown in Figure 9 The pulsearrival time data provided and used for multilaterationin the current work are to millisecond precision
coun
ts
125
-100
20
40
60
80
100
microseconds750-1250 -1000 -800 -600 -400 -200 0 200 400 600
FIG 9 Pulse start timing measurements using simulated
gunshot impulses triggered by GPS timepulses
The audio processing code analyzes the first 250 msfollowing pulse arrival time to determine the likelihoodthat the impulse is due to a gunshot muzzle blast Mea-sured characteristics of the impulse include the integratedpower of the impulse the shape of its envelope and a nor-malized power spectrum These data are transmitted toa common endpoint for the multilateration computation
C Classification
The original 48 kHz data is discarded after pulse pro-cessing data downsampled to 12 kHz is cached on thesensor for 30 hours to support forensic analysis Follow-ing detection of a potential gunshot a 2-second subset ofdownsampled (12 kHz) FLAC-encoded audio is retrievedfrom the two closest sensors and used to build an imagemosaic (Figure 10) comprising features characteristic ofthe gunshot audio on each sensor and features character-istic of the incident as a whole A full description of imagemosaic construction is outside of the scope of the presentwork but the tiles comprising the image can be summa-rized as follows A) waveform image B) discrete waveletspectrogram of the de-noised waveform C) pulse time-of-arrival markers aligned using the shooter-sensor timedelay computed via multilateration D) discrete waveletspectrogram of the noise (complement of tile B above)E) wavelet transform of the first impulse F) waveformof the first impulse G) participating area as defined bythe Voronoi diagram of participating sensors H) locationof recent nearby incidents I) plots of various per-sensorparameters as a function of distance J) version-tracking
code K) time-of-date counters L) individual shot loca-tions M) power spectrum N O P) pulse feature coun-ters Q R) recent incident counters S) logo Discretewavelet transforms are performed using the biorthogonal22 wavelet and scaling functions
Classification of the mosaic images is performed us-ing the ResNet (He et al 2016) image classifier trainedusing field-collected data labelled by human reviewersEach mosaic image (one from the nearest sensor and onefrom the second-nearest) is classified independently theoutputs of the two classifiers are combined to minimizethe likelihood of false negatives In the vast majority ofcases ldquoground truthrdquo (eg shell casings video record-ings) is not available and it is to be expected that sometraining data are misidentified
A
BCDE
F G H I
J K L M N O P Q R S
FIG 10 The top image shows a typical mosaic image used for
machine classification with ResNet image classifier This ex-
ample is from a 9 mm firearm discharged at Firing Position 8
Each image used for classification is comprised of 19 individ-
ual tiles some tiles are derived from a 2-second subset of 12
kHz audio while others are derived from the characteristics
of the incident as a whole See text for tile descriptions
8 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Incidents classified as gunfire are pushed to the pub-lic safety agencyrsquos dispatch system andor mobile de-vices All of the pulse data associated with an inci-dent is stored in a database so that the measurementsmade by the remote sensor are available for later anal-ysis If a forensic report is requested (typically in thecourse of a criminal investigation) within 24 hours eightseconds of 12 kHz downsampled audio may be retrievedfrom sensors participating in the incident The down-sampled audio is invaluable for verifying that the pulseselection algorithms have grouped the input pulse datainto appropriate subsets for multilateration
D Weather Measurements
Reliable temperature data with a precision of plusmn1 Care available via NWS METAR readings from major air-ports measurements from Pittsburgh International Air-port (KPIT) and Allegheny County Airport (KAGC)were used in the present work Wind is highly depen-dent on local conditions and sensor mounting elevationso the airport values can provide only a rough estimateof local conditions but both airports reported negligiblewind of 0 m sminus1 to 5 m sminus1 during the live fire test so theeffects of wind were not investigated
IV DESCRIPTION OF LIVE FIRE TESTS
ShotSpotter sensor arrays are routinely tested priorto active use by law enforcement The live fire test ofthe ShotSpotter system examined here was conducted inPittsburgh PA by the Pittsburgh Bureau of Police inDecember 2018 Pittsburgh has mixture of hilly andflat terrain The regions covered by these tests primar-ily contain detached structures one to three stories inheight comparable to the scale of structures in manyother American cities Most sensors are installed onrooftops the major component of the variance in sen-sor elevation is due to the hilly terrain Several of thefiring positions were adjacent to institutional buildingsthat generated loud sharp echoes
Officers secured the target area prior to each test forsafety reasons Live rounds were discharged into a bul-let trap at distance asymp 3 m from the firearm Figure (11)All shots at a giving firing position were discharged withthe muzzle of the firearm pointed in the same directionwhich was not otherwise specified The survey locationof each firing position was determined by ShotSpotterpersonnel during the test using a smartphone applica-tion and qualitatively verified using aerial photographsavailable on Google Earth Survey error ε was not well-characterized during the test but typical performance ofsuch devices (which make use of signals from cellular andWiFi networks in addition to GPS) when used outdoorswith good sky view is on the order of ε = 25 m
Testing followed the standard firing sequence used byShotSpotter This comprises twelve shots (three singleshots and three groups of three shots) for each firing po-sition and tested weapon This test used three different
FIG 11 Firing Position 1 showing the shooter and bullet
trap illustrating the source of the signals used for the test
FP description NM n ε ρ
(m) (sensorskm2)
FP1 overpass ˜35 m above grade 3636 178 414 94
FP2 parking lot near top of hill 3636 143 520 114
FP3 intersection on high bluff 3636 99 349 75
FP4 intersection near top of hill 3636 138 476 94
FP5 playing field at head of valley 3336 116 221 85
FP6 playing field near top of hill 3636 136 554 85
FP7 playing field at end of valley 3636 149 788 124
FP8 intersection at bottom of valley 3636 112 218 99
FP9 parking lot on sloped region 3636 106 693 80
TABLE II Realtime performance at the nine firing positions
(FP) analyzed in present study Buildings at most sites com-
prised detached residential structures 1ndash3 stories in height
with some larger commercial residential and institutional
buildings Ratio NM is number of shots N detected out of
shots fired M n is mean participating sensor count per shot
survey error ε is the distance from the acoustically-determined
centroid to the survey location determined by smartphone-
assisted GPS Sensor density ρ is in sensorskm2 This is 2D
performance using the algorithm matching the most sensors
for each shot
handguns at each firing position (45 cal 40 cal 9 mm)The test sequence was repeated at each of nine firing po-sitions for a total of 162 tests comprising 324 shots Ageneral description of each firing position is given in Ta-ble II Temperature during the test was minus1 plusmn 1C withlight (0ndash2 ms) wind During the real-time tests thesystem detected 100 of incidents and located 969 ofincidents within a 25 m benchmark criterion The cumu-lative distribution function of survey error below 25 m for
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 9
Frac
tion
of in
cide
nts
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
FIG 12 Cumulative distribution function of survey error
during live-fire testings For live fire incidents 3-shot bursts
are detected and scored as a single incident
all tests is shown Figure 12 The real-time ShotSpottersystem bundles multiple closely-spaced shots into a singleincident so scoring is per-test rather than per-shot
Following each activation the system requests two-second samples of 12 kHz audio to facilitate machineclassification The results of the on-sensor pulse anal-ysis are stored in a database for later use Following thetest ShotSpotter personnel retrieved up to eight secondsof additional audio from selected sensors located within800 m of the firing position The range limit is in align-ment with the audio retrieval policy adopted by the com-pany when servicing forensic requests The present studylimits performance analysis to sensors located within an800 m radius of each firing position
Selected data from these tests are available as sup-plementary materials These materials include pulsedata (impulse arrival time signal-to-noise ratio acousticpower and sensor position) and up to six 12 kHz audiofiles for each test Courts of law routinely redact sensorlocations from trial records because of the risk of retal-iation against property owners accordingly the sensorlocations in the dataset are provided relative to an arbi-trary (and unpublished) origin that is different for eachfiring position
The pulse data include a record of impulsive soundstriggered during the time range around each test Theseinclude muzzle-blast sounds with near line-of-sight prop-agation paths that are useful for multilateration locationas well as multipath signals and other impulsive noisesources that are unrelated to the gunfire test ShotSpot-ter uses various pattern-matching and combinatorial con-sistency algorithms to pick sets of pulses suitable for mul-
tilateration While these routines are not revealed in thepresent work the output of the pulse selection algorithms(as tuples of pulses for each shot of each test) are pro-vided as supplementary materials
V ANALYSIS
A Multilateration Implementations
The nine firing positions (Table II) were re-analyzedoffline to evaluate the performance of the four 2D imple-mentations available (Reddi LeastSquares MLG andIDT) The input data were tuples of shortest acousticpath pulses within 800 m The mean number of partic-ipating sensors per shot ranged from 96 to 175 wellover the four needed for unambiguous 2D multilatera-tion Results by implementation are shown in Table IIIThe survey error ε is the two-dimensional distance fromthe acoustic multilateration centroid to the survey loca-tion determined by smartphone GPS σ1 and σ2 are thesquare roots of the eigenvalues of the two-dimensional co-variance matrix Two-dimensional distance is consideredthe appropriate error measure in a public safety context
All four routines solve the same mathematicalproblemmdashminimizing the difference between the pre-dicted and measured arrival times at the several sensorsassuming a straight-line propagation modelmdashso unsur-prisingly similar results are obtained from all four algo-rithms The Reddi implementation uses the first report-ing sensor as a reference which gives more weight to thenearest sensor than to all of the rest The LeastSquaresand related IDT routines yield good accuracy and stabil-ity but the LeastSquares requires an extra TDoA and theIDT routine has a running time roughly ten times longerthan Reddi or MLG for the same input data because itis iterative The MLG implementation requires only theminimum number of TDoAs for a solution does not ar-bitrarily overweight a single sensor works in two or threedimensions and also has the fastest running time sincethe computation required to set up R is simple and Rdagger
can be computed using SVD The MLG implementationwas used in the remainder of the study
B Effects of geometric constraint
While a ShotSpotter array in Californiarsquos CentralValley has a vertical range of just 10 m over its entire5 km extent the Pittsburgh array under study has sen-sor elevation change (comprising terrain plus buildingheight) of up to 160 m over 1 km This makes the arraysuitable for a study of the effect of geometric constrainton location accuracy
All incidents were relocated under the three geomet-ric constraints (2D 25D 3D) to quantify the effect ofincluding elevation data in the multilateration calcula-tion The system was permitted to use any algorithm inselecting pulse sets for multilateration the MLG algo-rithm was used for the final location computation Theresults (Table IV) show that 2D location results are very
10 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 7 Firing Position 8 Firing Position 9
FIG 13 Sensor positions shown relative to Firing Positions 1ndash9 which are located at the center of each plot The filled
circles show those sensors that participated in at least one shot the dashed ldquodetection limitrdquo is the convex hull of those sensors
reporting in at least 50 of shots
similar with no apparent improvement due to the use of3D straight-line distance as a propagation model
A possible explanation is that a shot fired at groundlevel makes one diffracted path at the nearest buildingand then travels above the roofline along a path well-approximated by the 2D straight-line distance 2D mul-tilateration is implicitly locating in the plane of the sen-sors so the system may be locating the best-fit location
of a point slightly above the shooter Because the 2Ddistances between sensors are so much larger than heightof typical sensors above ground the error introduced bythis process is small
These results suggest that the 2D geometric con-straint is appropriate for acoustic multilateration of gun-shots even in hilly terrain The resulting locations areof high accuracy with precision of a few meters even
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 11
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

There are two potential advantages of three-dimensional multilateration First a 3D straight-linedistance propagation model can be used This is po-tentially more accurate Second the elevation of theshooter can be estimated The downside of 3D multilat-eration is that the additional degree of freedom allowedby three-dimensional multilateration can lead to less ac-curate 2D results if the sensor position matrix is poorlyconditioned eg the range of vertical elevations of re-porting sensors is small compared with the horizontalspacing between them With poorly-conditioned arrayssmall errors in the measurements of arrival time sensorposition or speed of sound may result in large changesin the shooterrsquos putative elevation
There are plausible use cases for detecting gunshotsabove ground level including locating shots fired fromthe upper floors of a structure and assisting in the classifi-cation of aerial fireworks Nevertheless the vast majorityof firearms are discharged at ground level so a practicalapproach is to do the bulk of pulse selection in two di-mensions and then refine the solution using a 3D modelwhen sufficient data are available
An approach that enables use of a 3D propagationmodel while avoiding the instability of a full 3D solutionis to constrain the shooter location to a two-dimensionalplane This ldquo25Drdquo method (Calhoun 2013) refines aninitial 2D solution by assuming the shooter is standingon the ground (or on the roof of a building) and con-structing R with a duplicate set of sensors with identicalarrival time but position reflected through the horizontalplane containing the shooter Figure 6 The method re-quires use of a digital elevation andor building modelto provide an estimate for zlowast the z-elevation of theshooter With ground plane normal to z each TDoAtuple (xi yi zi ti) in (4) is supplemented with a secondTDoA tuple (xi yi 2zlowastminuszi ti) This doubles the numberof columns in (4) and the number of rows in (5) but nochanges in algorithm are required The solution will beconstrained to elevation zlowast by the symmetry of the inputdata
F Weather Effects
Atmospheric conditions affect sound propagationand therefore the accuracy of an acoustic gunshot loca-tion system The speed of sound varies only slowly withtemperature and little with humidity or pressure so thedry air relationship for the speed of sound c may be usedwith acceptable accuracy This is
c = 2003radicT + 27315 m sminus1 (8)
where T is the temperature in CSound energy is transmitted as a compression wave
in a fluid a moving fluid carries the sound energy withit The multilateration routines of Section II D assumea stationary medium but the effects of a homogeneousmoving fluid can be incorporated by shifting the apparentposition of each sensor to account for air motion fromwhen the shot is fired to when it is detected With the
FIG 6 Method for constructing a sensor array through a
ground plane by reflection This permits use of elevation data
from the remote sensors while constraining the output to the
specified plane
z-axis component of wind vector ~v assumed to be zerothe wind-corrected position of the sensors is given by
[xprimeiyprimei
]=
[xiyi
]minus (ti minus tlowast)
[vxvy
](9)
where ti the arrival time at each sensor and vx and vyare the x- and yminuscomponents of the wind vector Thedischarge time tlowast is not known a priori but it can beestimated by subtracting an appropriate value from thearrival time at the first reporting sensor A suitable valueis the (historic) mean distance from the shooter to thefirst reporting sensor a value of 10 s is appropriate forarrays with sensor densities in the range of 2 sensorskm2
to 12 sensorskm2 The wind-correction process can berepeated with a more accurate value after initial compu-tation of discharge time tlowast
Other deleterious effects of wind are not so easilyhandled Wind increases the background noise detectedby outdoor microphones (Raspet et al 2006) an effectthat can be ameliorated but not entirely eliminated withproper windscreens (Hosier and Donavan 1979 Lin et al2014 Schomer et al 1990 Wuttke 1992) Wind noise re-duces the signal-to-noise ratio of gunshot impulses mak-ing them harder to detect Gradients in wind speed andtemperature with elevation refract the sound bendingit upwards in the upwind direction and downwards inthe downwind direction (Franke et al 1988 Wiener andKeast 1959 Wilson 2003) Upwind refraction createsa ldquoshadow zonerdquo where the gunshot signal is not de-tectable Because of the potential lack of participationfrom upwind sensors during windy conditions additionalsensors must be to deployed to enable successful mul-tilateration in all weather conditions The ShotSpottersystem does not otherwise compensate for the effects ofwind or temperature gradients
6 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
apparentposition
of sensor
wind
sensor
FIG 7 Adjustment of sensor positions to take homogeneous
fluid movement into account Energy is propagated from
source to sensor via a combination of bulk fluid flow and
acoustic propagation The effects of bulk fluid flow can be
incorporated by shifting the apparent position of the sensor
to the position that would have received the signal in the
absence of fluid flow
III SYSTEM DESIGN
A Array design
A typical deployment density is 2 sensorskm2 to12 sensorskm2 with the density dependent on the den-sity of structures and foliage in the covered area The lowend of this range is used in open areas where few struc-tures impede acoustic propagation such as anti-poachingdeployments higher sensor densities are used in areaswith a high density of structures high background noise(traffic rapid transit systems) difficult wind conditionsor unfamiliar environments Sensors are installed on el-evated locations such as rooftops and utility poles to in-crease the number of near line-of-sight audio paths andto minimize background noise Wind noise is mitigatedwith a 35 cm layer of open-cell foam around the micro-phones
B Sensor processing
All signal processing and pulse detection opera-tions are performed in the field on remotely-deployedsingle-board computers based on the Texas InstrumentsAM335x platform Sensor position is provided by a u-blox MAX 7 GPS chipset and the Linux system clockis disciplined using the PPS signal from the GPS Theu-blox MAX-7 series of GPS chipsets have a datasheetlocation accuracy of 25m (50 circular error probability(CEP)) and timepulse accuracy 30 n sec (RMS) Actualperformance depends on the satellite constellation visi-ble from the installed sensor position Because sensorsare rarely moved averaging over long periods of time isa feasible method for improving location precision Eachhour the mean position over the previous hour is storedand a long-term average position re-estimated based onvalues from up to 180 days of hourly records (Figure 8)with the multilateration calculations making use of thelong-term averages It is expected that the increasing
availability of high-accuracy real-time kinematic (RTK)GPS chipsets will reduce or eliminate the need for posi-tion averaging in future multilateration systems
frequ
ency
07
0
01
02
03
04
05
06
2D distance from centroid (m)15000 25 50 75 100 125
by hour
by minute
LTA
FIG 8 Horizontal GPS performance of a typical stationary
sensor showing the distance from the centroid of GPS mea-
surements sampled once per minute of the hourly averages
and of the long-term average of hourly values 50 CEP is
slightly worse than predicted by the datasheet but averag-
ing reduces the RMS distance from the centroid to less than
002 m
Audio sound pressure level is measured usingKingstate KECG2742WBL waterproof electret micro-phones and digitized using a Cirrus Logic WM8737analog-to-digital converter which samples 24-bit audiodata at 48 kHz Microphone sensitivity is minus42 plusmn 3 dBSPL giving a full-scale digital output of approximately93 dB SPL Network connectivity is provided by an on-board cellular data module
For performance reasons the pulse localization algo-rithm described in II B is implemented as a discrete-timealgorithm The digitized input stream is split up into2048-length chunks with 50 overlap so that a Hann win-dow can be applied without data loss After windowingdata is converted into the frequency domain for filter-ing and analysis A typical pulse localization response isshown in Figure 3
system σ (micros)
GPS timepulse 3 times 10minus2
Linux system clock 1 times 10minus3
Pulse start measurement 1 times 102
TABLE I Scale of contributions to pulse arrival time error
Pulse arrival time measurements are derived from au-dio synchronized to the GPS PPS timepulse As shownin Table I the timing errors associated with the GPSsystem are negligible compared with the uncertainty inpulse arrival time measurement The net effect of all
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 7
timing errors is estimated by running the pulse detec-tion algorithm on gunshot-like impulsive signals synchro-nized with GPS PPS This measurement takes into ac-count multiple sources of error The measured timingerror through the ShotSpotter sensors has a mean ofmicro = minus316 micros with a standard deviation of σ = 996 microswith a typical measurement shown in Figure 9 The pulsearrival time data provided and used for multilaterationin the current work are to millisecond precision
coun
ts
125
-100
20
40
60
80
100
microseconds750-1250 -1000 -800 -600 -400 -200 0 200 400 600
FIG 9 Pulse start timing measurements using simulated
gunshot impulses triggered by GPS timepulses
The audio processing code analyzes the first 250 msfollowing pulse arrival time to determine the likelihoodthat the impulse is due to a gunshot muzzle blast Mea-sured characteristics of the impulse include the integratedpower of the impulse the shape of its envelope and a nor-malized power spectrum These data are transmitted toa common endpoint for the multilateration computation
C Classification
The original 48 kHz data is discarded after pulse pro-cessing data downsampled to 12 kHz is cached on thesensor for 30 hours to support forensic analysis Follow-ing detection of a potential gunshot a 2-second subset ofdownsampled (12 kHz) FLAC-encoded audio is retrievedfrom the two closest sensors and used to build an imagemosaic (Figure 10) comprising features characteristic ofthe gunshot audio on each sensor and features character-istic of the incident as a whole A full description of imagemosaic construction is outside of the scope of the presentwork but the tiles comprising the image can be summa-rized as follows A) waveform image B) discrete waveletspectrogram of the de-noised waveform C) pulse time-of-arrival markers aligned using the shooter-sensor timedelay computed via multilateration D) discrete waveletspectrogram of the noise (complement of tile B above)E) wavelet transform of the first impulse F) waveformof the first impulse G) participating area as defined bythe Voronoi diagram of participating sensors H) locationof recent nearby incidents I) plots of various per-sensorparameters as a function of distance J) version-tracking
code K) time-of-date counters L) individual shot loca-tions M) power spectrum N O P) pulse feature coun-ters Q R) recent incident counters S) logo Discretewavelet transforms are performed using the biorthogonal22 wavelet and scaling functions
Classification of the mosaic images is performed us-ing the ResNet (He et al 2016) image classifier trainedusing field-collected data labelled by human reviewersEach mosaic image (one from the nearest sensor and onefrom the second-nearest) is classified independently theoutputs of the two classifiers are combined to minimizethe likelihood of false negatives In the vast majority ofcases ldquoground truthrdquo (eg shell casings video record-ings) is not available and it is to be expected that sometraining data are misidentified
A
BCDE
F G H I
J K L M N O P Q R S
FIG 10 The top image shows a typical mosaic image used for
machine classification with ResNet image classifier This ex-
ample is from a 9 mm firearm discharged at Firing Position 8
Each image used for classification is comprised of 19 individ-
ual tiles some tiles are derived from a 2-second subset of 12
kHz audio while others are derived from the characteristics
of the incident as a whole See text for tile descriptions
8 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Incidents classified as gunfire are pushed to the pub-lic safety agencyrsquos dispatch system andor mobile de-vices All of the pulse data associated with an inci-dent is stored in a database so that the measurementsmade by the remote sensor are available for later anal-ysis If a forensic report is requested (typically in thecourse of a criminal investigation) within 24 hours eightseconds of 12 kHz downsampled audio may be retrievedfrom sensors participating in the incident The down-sampled audio is invaluable for verifying that the pulseselection algorithms have grouped the input pulse datainto appropriate subsets for multilateration
D Weather Measurements
Reliable temperature data with a precision of plusmn1 Care available via NWS METAR readings from major air-ports measurements from Pittsburgh International Air-port (KPIT) and Allegheny County Airport (KAGC)were used in the present work Wind is highly depen-dent on local conditions and sensor mounting elevationso the airport values can provide only a rough estimateof local conditions but both airports reported negligiblewind of 0 m sminus1 to 5 m sminus1 during the live fire test so theeffects of wind were not investigated
IV DESCRIPTION OF LIVE FIRE TESTS
ShotSpotter sensor arrays are routinely tested priorto active use by law enforcement The live fire test ofthe ShotSpotter system examined here was conducted inPittsburgh PA by the Pittsburgh Bureau of Police inDecember 2018 Pittsburgh has mixture of hilly andflat terrain The regions covered by these tests primar-ily contain detached structures one to three stories inheight comparable to the scale of structures in manyother American cities Most sensors are installed onrooftops the major component of the variance in sen-sor elevation is due to the hilly terrain Several of thefiring positions were adjacent to institutional buildingsthat generated loud sharp echoes
Officers secured the target area prior to each test forsafety reasons Live rounds were discharged into a bul-let trap at distance asymp 3 m from the firearm Figure (11)All shots at a giving firing position were discharged withthe muzzle of the firearm pointed in the same directionwhich was not otherwise specified The survey locationof each firing position was determined by ShotSpotterpersonnel during the test using a smartphone applica-tion and qualitatively verified using aerial photographsavailable on Google Earth Survey error ε was not well-characterized during the test but typical performance ofsuch devices (which make use of signals from cellular andWiFi networks in addition to GPS) when used outdoorswith good sky view is on the order of ε = 25 m
Testing followed the standard firing sequence used byShotSpotter This comprises twelve shots (three singleshots and three groups of three shots) for each firing po-sition and tested weapon This test used three different
FIG 11 Firing Position 1 showing the shooter and bullet
trap illustrating the source of the signals used for the test
FP description NM n ε ρ
(m) (sensorskm2)
FP1 overpass ˜35 m above grade 3636 178 414 94
FP2 parking lot near top of hill 3636 143 520 114
FP3 intersection on high bluff 3636 99 349 75
FP4 intersection near top of hill 3636 138 476 94
FP5 playing field at head of valley 3336 116 221 85
FP6 playing field near top of hill 3636 136 554 85
FP7 playing field at end of valley 3636 149 788 124
FP8 intersection at bottom of valley 3636 112 218 99
FP9 parking lot on sloped region 3636 106 693 80
TABLE II Realtime performance at the nine firing positions
(FP) analyzed in present study Buildings at most sites com-
prised detached residential structures 1ndash3 stories in height
with some larger commercial residential and institutional
buildings Ratio NM is number of shots N detected out of
shots fired M n is mean participating sensor count per shot
survey error ε is the distance from the acoustically-determined
centroid to the survey location determined by smartphone-
assisted GPS Sensor density ρ is in sensorskm2 This is 2D
performance using the algorithm matching the most sensors
for each shot
handguns at each firing position (45 cal 40 cal 9 mm)The test sequence was repeated at each of nine firing po-sitions for a total of 162 tests comprising 324 shots Ageneral description of each firing position is given in Ta-ble II Temperature during the test was minus1 plusmn 1C withlight (0ndash2 ms) wind During the real-time tests thesystem detected 100 of incidents and located 969 ofincidents within a 25 m benchmark criterion The cumu-lative distribution function of survey error below 25 m for
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 9
Frac
tion
of in
cide
nts
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
FIG 12 Cumulative distribution function of survey error
during live-fire testings For live fire incidents 3-shot bursts
are detected and scored as a single incident
all tests is shown Figure 12 The real-time ShotSpottersystem bundles multiple closely-spaced shots into a singleincident so scoring is per-test rather than per-shot
Following each activation the system requests two-second samples of 12 kHz audio to facilitate machineclassification The results of the on-sensor pulse anal-ysis are stored in a database for later use Following thetest ShotSpotter personnel retrieved up to eight secondsof additional audio from selected sensors located within800 m of the firing position The range limit is in align-ment with the audio retrieval policy adopted by the com-pany when servicing forensic requests The present studylimits performance analysis to sensors located within an800 m radius of each firing position
Selected data from these tests are available as sup-plementary materials These materials include pulsedata (impulse arrival time signal-to-noise ratio acousticpower and sensor position) and up to six 12 kHz audiofiles for each test Courts of law routinely redact sensorlocations from trial records because of the risk of retal-iation against property owners accordingly the sensorlocations in the dataset are provided relative to an arbi-trary (and unpublished) origin that is different for eachfiring position
The pulse data include a record of impulsive soundstriggered during the time range around each test Theseinclude muzzle-blast sounds with near line-of-sight prop-agation paths that are useful for multilateration locationas well as multipath signals and other impulsive noisesources that are unrelated to the gunfire test ShotSpot-ter uses various pattern-matching and combinatorial con-sistency algorithms to pick sets of pulses suitable for mul-
tilateration While these routines are not revealed in thepresent work the output of the pulse selection algorithms(as tuples of pulses for each shot of each test) are pro-vided as supplementary materials
V ANALYSIS
A Multilateration Implementations
The nine firing positions (Table II) were re-analyzedoffline to evaluate the performance of the four 2D imple-mentations available (Reddi LeastSquares MLG andIDT) The input data were tuples of shortest acousticpath pulses within 800 m The mean number of partic-ipating sensors per shot ranged from 96 to 175 wellover the four needed for unambiguous 2D multilatera-tion Results by implementation are shown in Table IIIThe survey error ε is the two-dimensional distance fromthe acoustic multilateration centroid to the survey loca-tion determined by smartphone GPS σ1 and σ2 are thesquare roots of the eigenvalues of the two-dimensional co-variance matrix Two-dimensional distance is consideredthe appropriate error measure in a public safety context
All four routines solve the same mathematicalproblemmdashminimizing the difference between the pre-dicted and measured arrival times at the several sensorsassuming a straight-line propagation modelmdashso unsur-prisingly similar results are obtained from all four algo-rithms The Reddi implementation uses the first report-ing sensor as a reference which gives more weight to thenearest sensor than to all of the rest The LeastSquaresand related IDT routines yield good accuracy and stabil-ity but the LeastSquares requires an extra TDoA and theIDT routine has a running time roughly ten times longerthan Reddi or MLG for the same input data because itis iterative The MLG implementation requires only theminimum number of TDoAs for a solution does not ar-bitrarily overweight a single sensor works in two or threedimensions and also has the fastest running time sincethe computation required to set up R is simple and Rdagger
can be computed using SVD The MLG implementationwas used in the remainder of the study
B Effects of geometric constraint
While a ShotSpotter array in Californiarsquos CentralValley has a vertical range of just 10 m over its entire5 km extent the Pittsburgh array under study has sen-sor elevation change (comprising terrain plus buildingheight) of up to 160 m over 1 km This makes the arraysuitable for a study of the effect of geometric constrainton location accuracy
All incidents were relocated under the three geomet-ric constraints (2D 25D 3D) to quantify the effect ofincluding elevation data in the multilateration calcula-tion The system was permitted to use any algorithm inselecting pulse sets for multilateration the MLG algo-rithm was used for the final location computation Theresults (Table IV) show that 2D location results are very
10 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 7 Firing Position 8 Firing Position 9
FIG 13 Sensor positions shown relative to Firing Positions 1ndash9 which are located at the center of each plot The filled
circles show those sensors that participated in at least one shot the dashed ldquodetection limitrdquo is the convex hull of those sensors
reporting in at least 50 of shots
similar with no apparent improvement due to the use of3D straight-line distance as a propagation model
A possible explanation is that a shot fired at groundlevel makes one diffracted path at the nearest buildingand then travels above the roofline along a path well-approximated by the 2D straight-line distance 2D mul-tilateration is implicitly locating in the plane of the sen-sors so the system may be locating the best-fit location
of a point slightly above the shooter Because the 2Ddistances between sensors are so much larger than heightof typical sensors above ground the error introduced bythis process is small
These results suggest that the 2D geometric con-straint is appropriate for acoustic multilateration of gun-shots even in hilly terrain The resulting locations areof high accuracy with precision of a few meters even
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 11
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

apparentposition
of sensor
wind
sensor
FIG 7 Adjustment of sensor positions to take homogeneous
fluid movement into account Energy is propagated from
source to sensor via a combination of bulk fluid flow and
acoustic propagation The effects of bulk fluid flow can be
incorporated by shifting the apparent position of the sensor
to the position that would have received the signal in the
absence of fluid flow
III SYSTEM DESIGN
A Array design
A typical deployment density is 2 sensorskm2 to12 sensorskm2 with the density dependent on the den-sity of structures and foliage in the covered area The lowend of this range is used in open areas where few struc-tures impede acoustic propagation such as anti-poachingdeployments higher sensor densities are used in areaswith a high density of structures high background noise(traffic rapid transit systems) difficult wind conditionsor unfamiliar environments Sensors are installed on el-evated locations such as rooftops and utility poles to in-crease the number of near line-of-sight audio paths andto minimize background noise Wind noise is mitigatedwith a 35 cm layer of open-cell foam around the micro-phones
B Sensor processing
All signal processing and pulse detection opera-tions are performed in the field on remotely-deployedsingle-board computers based on the Texas InstrumentsAM335x platform Sensor position is provided by a u-blox MAX 7 GPS chipset and the Linux system clockis disciplined using the PPS signal from the GPS Theu-blox MAX-7 series of GPS chipsets have a datasheetlocation accuracy of 25m (50 circular error probability(CEP)) and timepulse accuracy 30 n sec (RMS) Actualperformance depends on the satellite constellation visi-ble from the installed sensor position Because sensorsare rarely moved averaging over long periods of time isa feasible method for improving location precision Eachhour the mean position over the previous hour is storedand a long-term average position re-estimated based onvalues from up to 180 days of hourly records (Figure 8)with the multilateration calculations making use of thelong-term averages It is expected that the increasing
availability of high-accuracy real-time kinematic (RTK)GPS chipsets will reduce or eliminate the need for posi-tion averaging in future multilateration systems
frequ
ency
07
0
01
02
03
04
05
06
2D distance from centroid (m)15000 25 50 75 100 125
by hour
by minute
LTA
FIG 8 Horizontal GPS performance of a typical stationary
sensor showing the distance from the centroid of GPS mea-
surements sampled once per minute of the hourly averages
and of the long-term average of hourly values 50 CEP is
slightly worse than predicted by the datasheet but averag-
ing reduces the RMS distance from the centroid to less than
002 m
Audio sound pressure level is measured usingKingstate KECG2742WBL waterproof electret micro-phones and digitized using a Cirrus Logic WM8737analog-to-digital converter which samples 24-bit audiodata at 48 kHz Microphone sensitivity is minus42 plusmn 3 dBSPL giving a full-scale digital output of approximately93 dB SPL Network connectivity is provided by an on-board cellular data module
For performance reasons the pulse localization algo-rithm described in II B is implemented as a discrete-timealgorithm The digitized input stream is split up into2048-length chunks with 50 overlap so that a Hann win-dow can be applied without data loss After windowingdata is converted into the frequency domain for filter-ing and analysis A typical pulse localization response isshown in Figure 3
system σ (micros)
GPS timepulse 3 times 10minus2
Linux system clock 1 times 10minus3
Pulse start measurement 1 times 102
TABLE I Scale of contributions to pulse arrival time error
Pulse arrival time measurements are derived from au-dio synchronized to the GPS PPS timepulse As shownin Table I the timing errors associated with the GPSsystem are negligible compared with the uncertainty inpulse arrival time measurement The net effect of all
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 7
timing errors is estimated by running the pulse detec-tion algorithm on gunshot-like impulsive signals synchro-nized with GPS PPS This measurement takes into ac-count multiple sources of error The measured timingerror through the ShotSpotter sensors has a mean ofmicro = minus316 micros with a standard deviation of σ = 996 microswith a typical measurement shown in Figure 9 The pulsearrival time data provided and used for multilaterationin the current work are to millisecond precision
coun
ts
125
-100
20
40
60
80
100
microseconds750-1250 -1000 -800 -600 -400 -200 0 200 400 600
FIG 9 Pulse start timing measurements using simulated
gunshot impulses triggered by GPS timepulses
The audio processing code analyzes the first 250 msfollowing pulse arrival time to determine the likelihoodthat the impulse is due to a gunshot muzzle blast Mea-sured characteristics of the impulse include the integratedpower of the impulse the shape of its envelope and a nor-malized power spectrum These data are transmitted toa common endpoint for the multilateration computation
C Classification
The original 48 kHz data is discarded after pulse pro-cessing data downsampled to 12 kHz is cached on thesensor for 30 hours to support forensic analysis Follow-ing detection of a potential gunshot a 2-second subset ofdownsampled (12 kHz) FLAC-encoded audio is retrievedfrom the two closest sensors and used to build an imagemosaic (Figure 10) comprising features characteristic ofthe gunshot audio on each sensor and features character-istic of the incident as a whole A full description of imagemosaic construction is outside of the scope of the presentwork but the tiles comprising the image can be summa-rized as follows A) waveform image B) discrete waveletspectrogram of the de-noised waveform C) pulse time-of-arrival markers aligned using the shooter-sensor timedelay computed via multilateration D) discrete waveletspectrogram of the noise (complement of tile B above)E) wavelet transform of the first impulse F) waveformof the first impulse G) participating area as defined bythe Voronoi diagram of participating sensors H) locationof recent nearby incidents I) plots of various per-sensorparameters as a function of distance J) version-tracking
code K) time-of-date counters L) individual shot loca-tions M) power spectrum N O P) pulse feature coun-ters Q R) recent incident counters S) logo Discretewavelet transforms are performed using the biorthogonal22 wavelet and scaling functions
Classification of the mosaic images is performed us-ing the ResNet (He et al 2016) image classifier trainedusing field-collected data labelled by human reviewersEach mosaic image (one from the nearest sensor and onefrom the second-nearest) is classified independently theoutputs of the two classifiers are combined to minimizethe likelihood of false negatives In the vast majority ofcases ldquoground truthrdquo (eg shell casings video record-ings) is not available and it is to be expected that sometraining data are misidentified
A
BCDE
F G H I
J K L M N O P Q R S
FIG 10 The top image shows a typical mosaic image used for
machine classification with ResNet image classifier This ex-
ample is from a 9 mm firearm discharged at Firing Position 8
Each image used for classification is comprised of 19 individ-
ual tiles some tiles are derived from a 2-second subset of 12
kHz audio while others are derived from the characteristics
of the incident as a whole See text for tile descriptions
8 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Incidents classified as gunfire are pushed to the pub-lic safety agencyrsquos dispatch system andor mobile de-vices All of the pulse data associated with an inci-dent is stored in a database so that the measurementsmade by the remote sensor are available for later anal-ysis If a forensic report is requested (typically in thecourse of a criminal investigation) within 24 hours eightseconds of 12 kHz downsampled audio may be retrievedfrom sensors participating in the incident The down-sampled audio is invaluable for verifying that the pulseselection algorithms have grouped the input pulse datainto appropriate subsets for multilateration
D Weather Measurements
Reliable temperature data with a precision of plusmn1 Care available via NWS METAR readings from major air-ports measurements from Pittsburgh International Air-port (KPIT) and Allegheny County Airport (KAGC)were used in the present work Wind is highly depen-dent on local conditions and sensor mounting elevationso the airport values can provide only a rough estimateof local conditions but both airports reported negligiblewind of 0 m sminus1 to 5 m sminus1 during the live fire test so theeffects of wind were not investigated
IV DESCRIPTION OF LIVE FIRE TESTS
ShotSpotter sensor arrays are routinely tested priorto active use by law enforcement The live fire test ofthe ShotSpotter system examined here was conducted inPittsburgh PA by the Pittsburgh Bureau of Police inDecember 2018 Pittsburgh has mixture of hilly andflat terrain The regions covered by these tests primar-ily contain detached structures one to three stories inheight comparable to the scale of structures in manyother American cities Most sensors are installed onrooftops the major component of the variance in sen-sor elevation is due to the hilly terrain Several of thefiring positions were adjacent to institutional buildingsthat generated loud sharp echoes
Officers secured the target area prior to each test forsafety reasons Live rounds were discharged into a bul-let trap at distance asymp 3 m from the firearm Figure (11)All shots at a giving firing position were discharged withthe muzzle of the firearm pointed in the same directionwhich was not otherwise specified The survey locationof each firing position was determined by ShotSpotterpersonnel during the test using a smartphone applica-tion and qualitatively verified using aerial photographsavailable on Google Earth Survey error ε was not well-characterized during the test but typical performance ofsuch devices (which make use of signals from cellular andWiFi networks in addition to GPS) when used outdoorswith good sky view is on the order of ε = 25 m
Testing followed the standard firing sequence used byShotSpotter This comprises twelve shots (three singleshots and three groups of three shots) for each firing po-sition and tested weapon This test used three different
FIG 11 Firing Position 1 showing the shooter and bullet
trap illustrating the source of the signals used for the test
FP description NM n ε ρ
(m) (sensorskm2)
FP1 overpass ˜35 m above grade 3636 178 414 94
FP2 parking lot near top of hill 3636 143 520 114
FP3 intersection on high bluff 3636 99 349 75
FP4 intersection near top of hill 3636 138 476 94
FP5 playing field at head of valley 3336 116 221 85
FP6 playing field near top of hill 3636 136 554 85
FP7 playing field at end of valley 3636 149 788 124
FP8 intersection at bottom of valley 3636 112 218 99
FP9 parking lot on sloped region 3636 106 693 80
TABLE II Realtime performance at the nine firing positions
(FP) analyzed in present study Buildings at most sites com-
prised detached residential structures 1ndash3 stories in height
with some larger commercial residential and institutional
buildings Ratio NM is number of shots N detected out of
shots fired M n is mean participating sensor count per shot
survey error ε is the distance from the acoustically-determined
centroid to the survey location determined by smartphone-
assisted GPS Sensor density ρ is in sensorskm2 This is 2D
performance using the algorithm matching the most sensors
for each shot
handguns at each firing position (45 cal 40 cal 9 mm)The test sequence was repeated at each of nine firing po-sitions for a total of 162 tests comprising 324 shots Ageneral description of each firing position is given in Ta-ble II Temperature during the test was minus1 plusmn 1C withlight (0ndash2 ms) wind During the real-time tests thesystem detected 100 of incidents and located 969 ofincidents within a 25 m benchmark criterion The cumu-lative distribution function of survey error below 25 m for
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 9
Frac
tion
of in
cide
nts
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
FIG 12 Cumulative distribution function of survey error
during live-fire testings For live fire incidents 3-shot bursts
are detected and scored as a single incident
all tests is shown Figure 12 The real-time ShotSpottersystem bundles multiple closely-spaced shots into a singleincident so scoring is per-test rather than per-shot
Following each activation the system requests two-second samples of 12 kHz audio to facilitate machineclassification The results of the on-sensor pulse anal-ysis are stored in a database for later use Following thetest ShotSpotter personnel retrieved up to eight secondsof additional audio from selected sensors located within800 m of the firing position The range limit is in align-ment with the audio retrieval policy adopted by the com-pany when servicing forensic requests The present studylimits performance analysis to sensors located within an800 m radius of each firing position
Selected data from these tests are available as sup-plementary materials These materials include pulsedata (impulse arrival time signal-to-noise ratio acousticpower and sensor position) and up to six 12 kHz audiofiles for each test Courts of law routinely redact sensorlocations from trial records because of the risk of retal-iation against property owners accordingly the sensorlocations in the dataset are provided relative to an arbi-trary (and unpublished) origin that is different for eachfiring position
The pulse data include a record of impulsive soundstriggered during the time range around each test Theseinclude muzzle-blast sounds with near line-of-sight prop-agation paths that are useful for multilateration locationas well as multipath signals and other impulsive noisesources that are unrelated to the gunfire test ShotSpot-ter uses various pattern-matching and combinatorial con-sistency algorithms to pick sets of pulses suitable for mul-
tilateration While these routines are not revealed in thepresent work the output of the pulse selection algorithms(as tuples of pulses for each shot of each test) are pro-vided as supplementary materials
V ANALYSIS
A Multilateration Implementations
The nine firing positions (Table II) were re-analyzedoffline to evaluate the performance of the four 2D imple-mentations available (Reddi LeastSquares MLG andIDT) The input data were tuples of shortest acousticpath pulses within 800 m The mean number of partic-ipating sensors per shot ranged from 96 to 175 wellover the four needed for unambiguous 2D multilatera-tion Results by implementation are shown in Table IIIThe survey error ε is the two-dimensional distance fromthe acoustic multilateration centroid to the survey loca-tion determined by smartphone GPS σ1 and σ2 are thesquare roots of the eigenvalues of the two-dimensional co-variance matrix Two-dimensional distance is consideredthe appropriate error measure in a public safety context
All four routines solve the same mathematicalproblemmdashminimizing the difference between the pre-dicted and measured arrival times at the several sensorsassuming a straight-line propagation modelmdashso unsur-prisingly similar results are obtained from all four algo-rithms The Reddi implementation uses the first report-ing sensor as a reference which gives more weight to thenearest sensor than to all of the rest The LeastSquaresand related IDT routines yield good accuracy and stabil-ity but the LeastSquares requires an extra TDoA and theIDT routine has a running time roughly ten times longerthan Reddi or MLG for the same input data because itis iterative The MLG implementation requires only theminimum number of TDoAs for a solution does not ar-bitrarily overweight a single sensor works in two or threedimensions and also has the fastest running time sincethe computation required to set up R is simple and Rdagger
can be computed using SVD The MLG implementationwas used in the remainder of the study
B Effects of geometric constraint
While a ShotSpotter array in Californiarsquos CentralValley has a vertical range of just 10 m over its entire5 km extent the Pittsburgh array under study has sen-sor elevation change (comprising terrain plus buildingheight) of up to 160 m over 1 km This makes the arraysuitable for a study of the effect of geometric constrainton location accuracy
All incidents were relocated under the three geomet-ric constraints (2D 25D 3D) to quantify the effect ofincluding elevation data in the multilateration calcula-tion The system was permitted to use any algorithm inselecting pulse sets for multilateration the MLG algo-rithm was used for the final location computation Theresults (Table IV) show that 2D location results are very
10 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 7 Firing Position 8 Firing Position 9
FIG 13 Sensor positions shown relative to Firing Positions 1ndash9 which are located at the center of each plot The filled
circles show those sensors that participated in at least one shot the dashed ldquodetection limitrdquo is the convex hull of those sensors
reporting in at least 50 of shots
similar with no apparent improvement due to the use of3D straight-line distance as a propagation model
A possible explanation is that a shot fired at groundlevel makes one diffracted path at the nearest buildingand then travels above the roofline along a path well-approximated by the 2D straight-line distance 2D mul-tilateration is implicitly locating in the plane of the sen-sors so the system may be locating the best-fit location
of a point slightly above the shooter Because the 2Ddistances between sensors are so much larger than heightof typical sensors above ground the error introduced bythis process is small
These results suggest that the 2D geometric con-straint is appropriate for acoustic multilateration of gun-shots even in hilly terrain The resulting locations areof high accuracy with precision of a few meters even
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 11
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

timing errors is estimated by running the pulse detec-tion algorithm on gunshot-like impulsive signals synchro-nized with GPS PPS This measurement takes into ac-count multiple sources of error The measured timingerror through the ShotSpotter sensors has a mean ofmicro = minus316 micros with a standard deviation of σ = 996 microswith a typical measurement shown in Figure 9 The pulsearrival time data provided and used for multilaterationin the current work are to millisecond precision
coun
ts
125
-100
20
40
60
80
100
microseconds750-1250 -1000 -800 -600 -400 -200 0 200 400 600
FIG 9 Pulse start timing measurements using simulated
gunshot impulses triggered by GPS timepulses
The audio processing code analyzes the first 250 msfollowing pulse arrival time to determine the likelihoodthat the impulse is due to a gunshot muzzle blast Mea-sured characteristics of the impulse include the integratedpower of the impulse the shape of its envelope and a nor-malized power spectrum These data are transmitted toa common endpoint for the multilateration computation
C Classification
The original 48 kHz data is discarded after pulse pro-cessing data downsampled to 12 kHz is cached on thesensor for 30 hours to support forensic analysis Follow-ing detection of a potential gunshot a 2-second subset ofdownsampled (12 kHz) FLAC-encoded audio is retrievedfrom the two closest sensors and used to build an imagemosaic (Figure 10) comprising features characteristic ofthe gunshot audio on each sensor and features character-istic of the incident as a whole A full description of imagemosaic construction is outside of the scope of the presentwork but the tiles comprising the image can be summa-rized as follows A) waveform image B) discrete waveletspectrogram of the de-noised waveform C) pulse time-of-arrival markers aligned using the shooter-sensor timedelay computed via multilateration D) discrete waveletspectrogram of the noise (complement of tile B above)E) wavelet transform of the first impulse F) waveformof the first impulse G) participating area as defined bythe Voronoi diagram of participating sensors H) locationof recent nearby incidents I) plots of various per-sensorparameters as a function of distance J) version-tracking
code K) time-of-date counters L) individual shot loca-tions M) power spectrum N O P) pulse feature coun-ters Q R) recent incident counters S) logo Discretewavelet transforms are performed using the biorthogonal22 wavelet and scaling functions
Classification of the mosaic images is performed us-ing the ResNet (He et al 2016) image classifier trainedusing field-collected data labelled by human reviewersEach mosaic image (one from the nearest sensor and onefrom the second-nearest) is classified independently theoutputs of the two classifiers are combined to minimizethe likelihood of false negatives In the vast majority ofcases ldquoground truthrdquo (eg shell casings video record-ings) is not available and it is to be expected that sometraining data are misidentified
A
BCDE
F G H I
J K L M N O P Q R S
FIG 10 The top image shows a typical mosaic image used for
machine classification with ResNet image classifier This ex-
ample is from a 9 mm firearm discharged at Firing Position 8
Each image used for classification is comprised of 19 individ-
ual tiles some tiles are derived from a 2-second subset of 12
kHz audio while others are derived from the characteristics
of the incident as a whole See text for tile descriptions
8 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Incidents classified as gunfire are pushed to the pub-lic safety agencyrsquos dispatch system andor mobile de-vices All of the pulse data associated with an inci-dent is stored in a database so that the measurementsmade by the remote sensor are available for later anal-ysis If a forensic report is requested (typically in thecourse of a criminal investigation) within 24 hours eightseconds of 12 kHz downsampled audio may be retrievedfrom sensors participating in the incident The down-sampled audio is invaluable for verifying that the pulseselection algorithms have grouped the input pulse datainto appropriate subsets for multilateration
D Weather Measurements
Reliable temperature data with a precision of plusmn1 Care available via NWS METAR readings from major air-ports measurements from Pittsburgh International Air-port (KPIT) and Allegheny County Airport (KAGC)were used in the present work Wind is highly depen-dent on local conditions and sensor mounting elevationso the airport values can provide only a rough estimateof local conditions but both airports reported negligiblewind of 0 m sminus1 to 5 m sminus1 during the live fire test so theeffects of wind were not investigated
IV DESCRIPTION OF LIVE FIRE TESTS
ShotSpotter sensor arrays are routinely tested priorto active use by law enforcement The live fire test ofthe ShotSpotter system examined here was conducted inPittsburgh PA by the Pittsburgh Bureau of Police inDecember 2018 Pittsburgh has mixture of hilly andflat terrain The regions covered by these tests primar-ily contain detached structures one to three stories inheight comparable to the scale of structures in manyother American cities Most sensors are installed onrooftops the major component of the variance in sen-sor elevation is due to the hilly terrain Several of thefiring positions were adjacent to institutional buildingsthat generated loud sharp echoes
Officers secured the target area prior to each test forsafety reasons Live rounds were discharged into a bul-let trap at distance asymp 3 m from the firearm Figure (11)All shots at a giving firing position were discharged withthe muzzle of the firearm pointed in the same directionwhich was not otherwise specified The survey locationof each firing position was determined by ShotSpotterpersonnel during the test using a smartphone applica-tion and qualitatively verified using aerial photographsavailable on Google Earth Survey error ε was not well-characterized during the test but typical performance ofsuch devices (which make use of signals from cellular andWiFi networks in addition to GPS) when used outdoorswith good sky view is on the order of ε = 25 m
Testing followed the standard firing sequence used byShotSpotter This comprises twelve shots (three singleshots and three groups of three shots) for each firing po-sition and tested weapon This test used three different
FIG 11 Firing Position 1 showing the shooter and bullet
trap illustrating the source of the signals used for the test
FP description NM n ε ρ
(m) (sensorskm2)
FP1 overpass ˜35 m above grade 3636 178 414 94
FP2 parking lot near top of hill 3636 143 520 114
FP3 intersection on high bluff 3636 99 349 75
FP4 intersection near top of hill 3636 138 476 94
FP5 playing field at head of valley 3336 116 221 85
FP6 playing field near top of hill 3636 136 554 85
FP7 playing field at end of valley 3636 149 788 124
FP8 intersection at bottom of valley 3636 112 218 99
FP9 parking lot on sloped region 3636 106 693 80
TABLE II Realtime performance at the nine firing positions
(FP) analyzed in present study Buildings at most sites com-
prised detached residential structures 1ndash3 stories in height
with some larger commercial residential and institutional
buildings Ratio NM is number of shots N detected out of
shots fired M n is mean participating sensor count per shot
survey error ε is the distance from the acoustically-determined
centroid to the survey location determined by smartphone-
assisted GPS Sensor density ρ is in sensorskm2 This is 2D
performance using the algorithm matching the most sensors
for each shot
handguns at each firing position (45 cal 40 cal 9 mm)The test sequence was repeated at each of nine firing po-sitions for a total of 162 tests comprising 324 shots Ageneral description of each firing position is given in Ta-ble II Temperature during the test was minus1 plusmn 1C withlight (0ndash2 ms) wind During the real-time tests thesystem detected 100 of incidents and located 969 ofincidents within a 25 m benchmark criterion The cumu-lative distribution function of survey error below 25 m for
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 9
Frac
tion
of in
cide
nts
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
FIG 12 Cumulative distribution function of survey error
during live-fire testings For live fire incidents 3-shot bursts
are detected and scored as a single incident
all tests is shown Figure 12 The real-time ShotSpottersystem bundles multiple closely-spaced shots into a singleincident so scoring is per-test rather than per-shot
Following each activation the system requests two-second samples of 12 kHz audio to facilitate machineclassification The results of the on-sensor pulse anal-ysis are stored in a database for later use Following thetest ShotSpotter personnel retrieved up to eight secondsof additional audio from selected sensors located within800 m of the firing position The range limit is in align-ment with the audio retrieval policy adopted by the com-pany when servicing forensic requests The present studylimits performance analysis to sensors located within an800 m radius of each firing position
Selected data from these tests are available as sup-plementary materials These materials include pulsedata (impulse arrival time signal-to-noise ratio acousticpower and sensor position) and up to six 12 kHz audiofiles for each test Courts of law routinely redact sensorlocations from trial records because of the risk of retal-iation against property owners accordingly the sensorlocations in the dataset are provided relative to an arbi-trary (and unpublished) origin that is different for eachfiring position
The pulse data include a record of impulsive soundstriggered during the time range around each test Theseinclude muzzle-blast sounds with near line-of-sight prop-agation paths that are useful for multilateration locationas well as multipath signals and other impulsive noisesources that are unrelated to the gunfire test ShotSpot-ter uses various pattern-matching and combinatorial con-sistency algorithms to pick sets of pulses suitable for mul-
tilateration While these routines are not revealed in thepresent work the output of the pulse selection algorithms(as tuples of pulses for each shot of each test) are pro-vided as supplementary materials
V ANALYSIS
A Multilateration Implementations
The nine firing positions (Table II) were re-analyzedoffline to evaluate the performance of the four 2D imple-mentations available (Reddi LeastSquares MLG andIDT) The input data were tuples of shortest acousticpath pulses within 800 m The mean number of partic-ipating sensors per shot ranged from 96 to 175 wellover the four needed for unambiguous 2D multilatera-tion Results by implementation are shown in Table IIIThe survey error ε is the two-dimensional distance fromthe acoustic multilateration centroid to the survey loca-tion determined by smartphone GPS σ1 and σ2 are thesquare roots of the eigenvalues of the two-dimensional co-variance matrix Two-dimensional distance is consideredthe appropriate error measure in a public safety context
All four routines solve the same mathematicalproblemmdashminimizing the difference between the pre-dicted and measured arrival times at the several sensorsassuming a straight-line propagation modelmdashso unsur-prisingly similar results are obtained from all four algo-rithms The Reddi implementation uses the first report-ing sensor as a reference which gives more weight to thenearest sensor than to all of the rest The LeastSquaresand related IDT routines yield good accuracy and stabil-ity but the LeastSquares requires an extra TDoA and theIDT routine has a running time roughly ten times longerthan Reddi or MLG for the same input data because itis iterative The MLG implementation requires only theminimum number of TDoAs for a solution does not ar-bitrarily overweight a single sensor works in two or threedimensions and also has the fastest running time sincethe computation required to set up R is simple and Rdagger
can be computed using SVD The MLG implementationwas used in the remainder of the study
B Effects of geometric constraint
While a ShotSpotter array in Californiarsquos CentralValley has a vertical range of just 10 m over its entire5 km extent the Pittsburgh array under study has sen-sor elevation change (comprising terrain plus buildingheight) of up to 160 m over 1 km This makes the arraysuitable for a study of the effect of geometric constrainton location accuracy
All incidents were relocated under the three geomet-ric constraints (2D 25D 3D) to quantify the effect ofincluding elevation data in the multilateration calcula-tion The system was permitted to use any algorithm inselecting pulse sets for multilateration the MLG algo-rithm was used for the final location computation Theresults (Table IV) show that 2D location results are very
10 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 7 Firing Position 8 Firing Position 9
FIG 13 Sensor positions shown relative to Firing Positions 1ndash9 which are located at the center of each plot The filled
circles show those sensors that participated in at least one shot the dashed ldquodetection limitrdquo is the convex hull of those sensors
reporting in at least 50 of shots
similar with no apparent improvement due to the use of3D straight-line distance as a propagation model
A possible explanation is that a shot fired at groundlevel makes one diffracted path at the nearest buildingand then travels above the roofline along a path well-approximated by the 2D straight-line distance 2D mul-tilateration is implicitly locating in the plane of the sen-sors so the system may be locating the best-fit location
of a point slightly above the shooter Because the 2Ddistances between sensors are so much larger than heightof typical sensors above ground the error introduced bythis process is small
These results suggest that the 2D geometric con-straint is appropriate for acoustic multilateration of gun-shots even in hilly terrain The resulting locations areof high accuracy with precision of a few meters even
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 11
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

Incidents classified as gunfire are pushed to the pub-lic safety agencyrsquos dispatch system andor mobile de-vices All of the pulse data associated with an inci-dent is stored in a database so that the measurementsmade by the remote sensor are available for later anal-ysis If a forensic report is requested (typically in thecourse of a criminal investigation) within 24 hours eightseconds of 12 kHz downsampled audio may be retrievedfrom sensors participating in the incident The down-sampled audio is invaluable for verifying that the pulseselection algorithms have grouped the input pulse datainto appropriate subsets for multilateration
D Weather Measurements
Reliable temperature data with a precision of plusmn1 Care available via NWS METAR readings from major air-ports measurements from Pittsburgh International Air-port (KPIT) and Allegheny County Airport (KAGC)were used in the present work Wind is highly depen-dent on local conditions and sensor mounting elevationso the airport values can provide only a rough estimateof local conditions but both airports reported negligiblewind of 0 m sminus1 to 5 m sminus1 during the live fire test so theeffects of wind were not investigated
IV DESCRIPTION OF LIVE FIRE TESTS
ShotSpotter sensor arrays are routinely tested priorto active use by law enforcement The live fire test ofthe ShotSpotter system examined here was conducted inPittsburgh PA by the Pittsburgh Bureau of Police inDecember 2018 Pittsburgh has mixture of hilly andflat terrain The regions covered by these tests primar-ily contain detached structures one to three stories inheight comparable to the scale of structures in manyother American cities Most sensors are installed onrooftops the major component of the variance in sen-sor elevation is due to the hilly terrain Several of thefiring positions were adjacent to institutional buildingsthat generated loud sharp echoes
Officers secured the target area prior to each test forsafety reasons Live rounds were discharged into a bul-let trap at distance asymp 3 m from the firearm Figure (11)All shots at a giving firing position were discharged withthe muzzle of the firearm pointed in the same directionwhich was not otherwise specified The survey locationof each firing position was determined by ShotSpotterpersonnel during the test using a smartphone applica-tion and qualitatively verified using aerial photographsavailable on Google Earth Survey error ε was not well-characterized during the test but typical performance ofsuch devices (which make use of signals from cellular andWiFi networks in addition to GPS) when used outdoorswith good sky view is on the order of ε = 25 m
Testing followed the standard firing sequence used byShotSpotter This comprises twelve shots (three singleshots and three groups of three shots) for each firing po-sition and tested weapon This test used three different
FIG 11 Firing Position 1 showing the shooter and bullet
trap illustrating the source of the signals used for the test
FP description NM n ε ρ
(m) (sensorskm2)
FP1 overpass ˜35 m above grade 3636 178 414 94
FP2 parking lot near top of hill 3636 143 520 114
FP3 intersection on high bluff 3636 99 349 75
FP4 intersection near top of hill 3636 138 476 94
FP5 playing field at head of valley 3336 116 221 85
FP6 playing field near top of hill 3636 136 554 85
FP7 playing field at end of valley 3636 149 788 124
FP8 intersection at bottom of valley 3636 112 218 99
FP9 parking lot on sloped region 3636 106 693 80
TABLE II Realtime performance at the nine firing positions
(FP) analyzed in present study Buildings at most sites com-
prised detached residential structures 1ndash3 stories in height
with some larger commercial residential and institutional
buildings Ratio NM is number of shots N detected out of
shots fired M n is mean participating sensor count per shot
survey error ε is the distance from the acoustically-determined
centroid to the survey location determined by smartphone-
assisted GPS Sensor density ρ is in sensorskm2 This is 2D
performance using the algorithm matching the most sensors
for each shot
handguns at each firing position (45 cal 40 cal 9 mm)The test sequence was repeated at each of nine firing po-sitions for a total of 162 tests comprising 324 shots Ageneral description of each firing position is given in Ta-ble II Temperature during the test was minus1 plusmn 1C withlight (0ndash2 ms) wind During the real-time tests thesystem detected 100 of incidents and located 969 ofincidents within a 25 m benchmark criterion The cumu-lative distribution function of survey error below 25 m for
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 9
Frac
tion
of in
cide
nts
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
FIG 12 Cumulative distribution function of survey error
during live-fire testings For live fire incidents 3-shot bursts
are detected and scored as a single incident
all tests is shown Figure 12 The real-time ShotSpottersystem bundles multiple closely-spaced shots into a singleincident so scoring is per-test rather than per-shot
Following each activation the system requests two-second samples of 12 kHz audio to facilitate machineclassification The results of the on-sensor pulse anal-ysis are stored in a database for later use Following thetest ShotSpotter personnel retrieved up to eight secondsof additional audio from selected sensors located within800 m of the firing position The range limit is in align-ment with the audio retrieval policy adopted by the com-pany when servicing forensic requests The present studylimits performance analysis to sensors located within an800 m radius of each firing position
Selected data from these tests are available as sup-plementary materials These materials include pulsedata (impulse arrival time signal-to-noise ratio acousticpower and sensor position) and up to six 12 kHz audiofiles for each test Courts of law routinely redact sensorlocations from trial records because of the risk of retal-iation against property owners accordingly the sensorlocations in the dataset are provided relative to an arbi-trary (and unpublished) origin that is different for eachfiring position
The pulse data include a record of impulsive soundstriggered during the time range around each test Theseinclude muzzle-blast sounds with near line-of-sight prop-agation paths that are useful for multilateration locationas well as multipath signals and other impulsive noisesources that are unrelated to the gunfire test ShotSpot-ter uses various pattern-matching and combinatorial con-sistency algorithms to pick sets of pulses suitable for mul-
tilateration While these routines are not revealed in thepresent work the output of the pulse selection algorithms(as tuples of pulses for each shot of each test) are pro-vided as supplementary materials
V ANALYSIS
A Multilateration Implementations
The nine firing positions (Table II) were re-analyzedoffline to evaluate the performance of the four 2D imple-mentations available (Reddi LeastSquares MLG andIDT) The input data were tuples of shortest acousticpath pulses within 800 m The mean number of partic-ipating sensors per shot ranged from 96 to 175 wellover the four needed for unambiguous 2D multilatera-tion Results by implementation are shown in Table IIIThe survey error ε is the two-dimensional distance fromthe acoustic multilateration centroid to the survey loca-tion determined by smartphone GPS σ1 and σ2 are thesquare roots of the eigenvalues of the two-dimensional co-variance matrix Two-dimensional distance is consideredthe appropriate error measure in a public safety context
All four routines solve the same mathematicalproblemmdashminimizing the difference between the pre-dicted and measured arrival times at the several sensorsassuming a straight-line propagation modelmdashso unsur-prisingly similar results are obtained from all four algo-rithms The Reddi implementation uses the first report-ing sensor as a reference which gives more weight to thenearest sensor than to all of the rest The LeastSquaresand related IDT routines yield good accuracy and stabil-ity but the LeastSquares requires an extra TDoA and theIDT routine has a running time roughly ten times longerthan Reddi or MLG for the same input data because itis iterative The MLG implementation requires only theminimum number of TDoAs for a solution does not ar-bitrarily overweight a single sensor works in two or threedimensions and also has the fastest running time sincethe computation required to set up R is simple and Rdagger
can be computed using SVD The MLG implementationwas used in the remainder of the study
B Effects of geometric constraint
While a ShotSpotter array in Californiarsquos CentralValley has a vertical range of just 10 m over its entire5 km extent the Pittsburgh array under study has sen-sor elevation change (comprising terrain plus buildingheight) of up to 160 m over 1 km This makes the arraysuitable for a study of the effect of geometric constrainton location accuracy
All incidents were relocated under the three geomet-ric constraints (2D 25D 3D) to quantify the effect ofincluding elevation data in the multilateration calcula-tion The system was permitted to use any algorithm inselecting pulse sets for multilateration the MLG algo-rithm was used for the final location computation Theresults (Table IV) show that 2D location results are very
10 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 7 Firing Position 8 Firing Position 9
FIG 13 Sensor positions shown relative to Firing Positions 1ndash9 which are located at the center of each plot The filled
circles show those sensors that participated in at least one shot the dashed ldquodetection limitrdquo is the convex hull of those sensors
reporting in at least 50 of shots
similar with no apparent improvement due to the use of3D straight-line distance as a propagation model
A possible explanation is that a shot fired at groundlevel makes one diffracted path at the nearest buildingand then travels above the roofline along a path well-approximated by the 2D straight-line distance 2D mul-tilateration is implicitly locating in the plane of the sen-sors so the system may be locating the best-fit location
of a point slightly above the shooter Because the 2Ddistances between sensors are so much larger than heightof typical sensors above ground the error introduced bythis process is small
These results suggest that the 2D geometric con-straint is appropriate for acoustic multilateration of gun-shots even in hilly terrain The resulting locations areof high accuracy with precision of a few meters even
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 11
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

Frac
tion
of in
cide
nts
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
FIG 12 Cumulative distribution function of survey error
during live-fire testings For live fire incidents 3-shot bursts
are detected and scored as a single incident
all tests is shown Figure 12 The real-time ShotSpottersystem bundles multiple closely-spaced shots into a singleincident so scoring is per-test rather than per-shot
Following each activation the system requests two-second samples of 12 kHz audio to facilitate machineclassification The results of the on-sensor pulse anal-ysis are stored in a database for later use Following thetest ShotSpotter personnel retrieved up to eight secondsof additional audio from selected sensors located within800 m of the firing position The range limit is in align-ment with the audio retrieval policy adopted by the com-pany when servicing forensic requests The present studylimits performance analysis to sensors located within an800 m radius of each firing position
Selected data from these tests are available as sup-plementary materials These materials include pulsedata (impulse arrival time signal-to-noise ratio acousticpower and sensor position) and up to six 12 kHz audiofiles for each test Courts of law routinely redact sensorlocations from trial records because of the risk of retal-iation against property owners accordingly the sensorlocations in the dataset are provided relative to an arbi-trary (and unpublished) origin that is different for eachfiring position
The pulse data include a record of impulsive soundstriggered during the time range around each test Theseinclude muzzle-blast sounds with near line-of-sight prop-agation paths that are useful for multilateration locationas well as multipath signals and other impulsive noisesources that are unrelated to the gunfire test ShotSpot-ter uses various pattern-matching and combinatorial con-sistency algorithms to pick sets of pulses suitable for mul-
tilateration While these routines are not revealed in thepresent work the output of the pulse selection algorithms(as tuples of pulses for each shot of each test) are pro-vided as supplementary materials
V ANALYSIS
A Multilateration Implementations
The nine firing positions (Table II) were re-analyzedoffline to evaluate the performance of the four 2D imple-mentations available (Reddi LeastSquares MLG andIDT) The input data were tuples of shortest acousticpath pulses within 800 m The mean number of partic-ipating sensors per shot ranged from 96 to 175 wellover the four needed for unambiguous 2D multilatera-tion Results by implementation are shown in Table IIIThe survey error ε is the two-dimensional distance fromthe acoustic multilateration centroid to the survey loca-tion determined by smartphone GPS σ1 and σ2 are thesquare roots of the eigenvalues of the two-dimensional co-variance matrix Two-dimensional distance is consideredthe appropriate error measure in a public safety context
All four routines solve the same mathematicalproblemmdashminimizing the difference between the pre-dicted and measured arrival times at the several sensorsassuming a straight-line propagation modelmdashso unsur-prisingly similar results are obtained from all four algo-rithms The Reddi implementation uses the first report-ing sensor as a reference which gives more weight to thenearest sensor than to all of the rest The LeastSquaresand related IDT routines yield good accuracy and stabil-ity but the LeastSquares requires an extra TDoA and theIDT routine has a running time roughly ten times longerthan Reddi or MLG for the same input data because itis iterative The MLG implementation requires only theminimum number of TDoAs for a solution does not ar-bitrarily overweight a single sensor works in two or threedimensions and also has the fastest running time sincethe computation required to set up R is simple and Rdagger
can be computed using SVD The MLG implementationwas used in the remainder of the study
B Effects of geometric constraint
While a ShotSpotter array in Californiarsquos CentralValley has a vertical range of just 10 m over its entire5 km extent the Pittsburgh array under study has sen-sor elevation change (comprising terrain plus buildingheight) of up to 160 m over 1 km This makes the arraysuitable for a study of the effect of geometric constrainton location accuracy
All incidents were relocated under the three geomet-ric constraints (2D 25D 3D) to quantify the effect ofincluding elevation data in the multilateration calcula-tion The system was permitted to use any algorithm inselecting pulse sets for multilateration the MLG algo-rithm was used for the final location computation Theresults (Table IV) show that 2D location results are very
10 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 7 Firing Position 8 Firing Position 9
FIG 13 Sensor positions shown relative to Firing Positions 1ndash9 which are located at the center of each plot The filled
circles show those sensors that participated in at least one shot the dashed ldquodetection limitrdquo is the convex hull of those sensors
reporting in at least 50 of shots
similar with no apparent improvement due to the use of3D straight-line distance as a propagation model
A possible explanation is that a shot fired at groundlevel makes one diffracted path at the nearest buildingand then travels above the roofline along a path well-approximated by the 2D straight-line distance 2D mul-tilateration is implicitly locating in the plane of the sen-sors so the system may be locating the best-fit location
of a point slightly above the shooter Because the 2Ddistances between sensors are so much larger than heightof typical sensors above ground the error introduced bythis process is small
These results suggest that the 2D geometric con-straint is appropriate for acoustic multilateration of gun-shots even in hilly terrain The resulting locations areof high accuracy with precision of a few meters even
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 11
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
rela
tive
north
ing
(m)
1000
-1000
-800
-600
-400
-200
0
200
400
600
800
relative easting (m)1000-1000 -750 -500 -250 0 250 500 750
detect
no detect
detect limit
firing point
Firing Position 7 Firing Position 8 Firing Position 9
FIG 13 Sensor positions shown relative to Firing Positions 1ndash9 which are located at the center of each plot The filled
circles show those sensors that participated in at least one shot the dashed ldquodetection limitrdquo is the convex hull of those sensors
reporting in at least 50 of shots
similar with no apparent improvement due to the use of3D straight-line distance as a propagation model
A possible explanation is that a shot fired at groundlevel makes one diffracted path at the nearest buildingand then travels above the roofline along a path well-approximated by the 2D straight-line distance 2D mul-tilateration is implicitly locating in the plane of the sen-sors so the system may be locating the best-fit location
of a point slightly above the shooter Because the 2Ddistances between sensors are so much larger than heightof typical sensors above ground the error introduced bythis process is small
These results suggest that the 2D geometric con-straint is appropriate for acoustic multilateration of gun-shots even in hilly terrain The resulting locations areof high accuracy with precision of a few meters even
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 11
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 1 Firing Position 2 Firing Position 3
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 4 Firing Position 5 Firing Position 6
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
rela
tive
posit
ion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shotssurvey
Firing Position 7 Firing Position 8 Firing Position 9
FIG 14 Results of MLG implementation under 2D constraint for Firing Positions 1ndash9
when the sensors comprising the array contain a non-plane component When a sufficient number of sensorsare available for 3D multilateration the results obtainedshow acceptable 2D location accuracy However the er-ror in the zminusaxis is high and the results show that thelargely planar arrays used in this study do not providesufficient elevation determination to identify the floor ofa multi-story structure from which a shot might be fired
Table IV also shows the elevation survey error εzwhich is the RMS difference between presumed shooterelevation of 15 m above grade and the output of the mul-tilateration algorithm The elevation survey error is onlymeaningful under the 3D constraint as the shooter ele-vation is arbitrarily set to 15 m above grade under the2D and 25D geometric constraints
12 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

Algo FP NM n ε σ1 σ2
(m) (m) (m)
Iterative FP1 3636 175 314 062 041
Discharge FP2 3636 175 514 140 025
Time FP3 3636 175 061 140 083
(IDT) FP4 3636 175 409 233 056
FP5 3636 140 325 171 093
FP6 3636 140 521 129 040
FP7 3636 139 717 094 039
FP8 3636 140 267 139 047
FP9 3636 99 658 066 055
Reddi FP1 3636 99 355 103 062
FP2 3636 98 466 105 033
FP3 3636 99 356 240 074
FP4 3636 138 769 552 186
FP5 3636 136 213 660 077
FP6 3636 112 630 076 050
FP7 2636 136 1837 549 321
FP8 3636 114 215 139 032
FP9 3636 114 678 506 084
LeastSquares FP1 3636 114 309 062 035
FP2 3636 114 401 168 020
FP3 3636 136 075 131 054
FP4 3136 136 393 135 071
FP5 3636 136 389 176 085
FP6 3636 136 562 147 050
FP7 3636 149 782 113 048
FP8 3536 96 248 195 160
FP9 3636 149 633 125 036
MLG FP1 3636 149 294 055 042
FP2 3636 112 403 187 031
FP3 3636 112 029 149 023
FP4 3636 108 455 140 060
FP5 3636 112 420 197 067
FP6 3636 106 528 125 038
FP7 3636 105 786 096 037
FP8 3636 101 277 189 151
FP9 3636 106 576 091 056
TABLE III Performance of several 2D multilateration imple-
mentations at nine firing positions (FP) The ratio NM is
number of shots N detected out of M shots fired while n is
the mean number of sensors used in the location The survey
error ε is the 2D RMS distance from the survey location σ1
and σ2 are the square roots of the eigenvalues of the covari-
ance matrix determined using PCA These correspond to the
standard deviations σX σY of a bivariate normal distribution
apparent source
actual source
diffractionsensor
shortest acoustic path
FIG 15 Schematic side view of how sound from a muzzle
blast discharged near ground level relies on sound diffraction
to reach a roof-mounted sensor From the point of view of the
sensor the source appears to be an above-ground-level source
with attenuated amplitude and nearly 2D propagation path
apparent sources
actual source
sensor
sensor
sensor
FIG 16 Schematic top view of the shortest acoustic path
from a shot discharged near ground level to several rooftop-
mounted sensors Diffraction shifts the apparent position of
the source from the point of view of each reporting sensor
but errors from multiple sensors tend to cancel when sensors
surround the actual source
C Effects of sensor density
A reporting sensor is one on which at least one gun-shot impulse is detected programmatically by a sensorfrom shots fired at a particular location A participatingsensor is one identified by the pulse selection algorithmsas a member of a subset suitable for multilateration
This series of firing tests was conducted on a nightwith still air after autumn leaf drop resulting in goodacoustic propagation of the gunshot sounds The report-ing sensor count was as high as 21 for the most power-ful firearm (45 cal) fired from the elevated position atFP1 the median number of participating sensors acrossall weapons and firing positions was 10 well above theminimum d + 2 = 4 participating sensors required forunambiguous 2D or 25D multilateration
To investigate the effects of reduced deployment den-sity the multilateration performance of reduced-densityarrays was evaluated using a Monte-Carlo simulationThese simulations make use of the real-time pulse de-tection performance the simulation is in varying the set
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 13
FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

FP NM n ε σ1 σ2 εz
(m) (m) (m) (m)
2D FP1 3636 1753 296 067 028 3495
FP2 3636 1400 360 282 038 022
FP3 3636 986 036 143 058 054
FP4 3636 1372 557 126 075 035
FP5 3636 1144 330 218 076 000
FP6 3636 1361 587 156 076 052
FP7 3636 1494 457 048 023 037
FP8 3636 1117 311 241 159 066
FP9 3636 1058 644 114 046 071
25D FP1 3636 1753 302 070 023 3495
FP2 3536 1358 362 272 035 022
FP3 3636 983 054 121 038 054
FP4 3636 1378 566 143 108 035
FP5 3636 1144 196 187 079 000
FP6 3636 1361 677 107 077 052
FP7 3636 1494 491 085 044 037
FP8 3636 1117 496 242 164 066
FP9 3636 1058 615 115 032 071
3D FP1 3636 1753 376 051 032 4240
FP2 3536 1358 446 256 028 1457
FP3 3636 983 251 195 072 4555
FP4 3636 1378 563 135 101 479
FP5 3636 1144 229 317 073 382
FP6 3636 1361 643 081 062 2035
FP7 3636 1494 484 173 081 373
FP8 3636 1117 411 292 166 4169
FP9 3536 1028 568 086 038 1875
TABLE IV Performance of MLG multilateration implemen-
tation under 2D 3D and ldquo25Drdquo (3D constrain-to-plane) ge-
ometric constraints Table columns have the same meaning
as Table III with the addition of εz the distance from mul-
tilateration elevation to survey elevation Note that for 2D
and 25D solutions the elevation coordinate is set arbitrarily
at 15 m above the ground elevation at the latitude longitude
of the multilateration results
of sensors considered to have been deployed during thetest 25 randomly-generated arrays were constructed ateach firing point for the desired number of participatingsensors Simulations were run for 4 5 6 8 10 12 and15 sensors corresponding to a sensor density of approxi-mately 2 sensorskm2 to 75 sensorskm2 In some casesthe target array density exceeded the number of sensorsparticipating in a shot so the maximum value of partic-ipating sensors was used Multilateration was performedusing the MLG algorithm under the 2D geometric con-
straint Simulated incidents were filtered using the samepulse selection and filtering criteria used in productionsystems with the result that some valid multilaterationsolutions were discarded because the signal amplitude onthe strongest participating sensor failed to meet the (ar-bitrary) 73 dB SPL amplitude threshold applied to allincidents
The results show that detection rates and locationaccuracy increase as the number of participating sensorsincreases With six participating sensors 963 of inci-dents can be located to an accuracy of 15 m or betterDetection rates and location accuracy continue to im-prove as the number of participating sensors increasesabove six but additional reporting sensors provide onlymarginal improvements The six-sensor result may be in-terpreted as ldquosufficient to provide good array geometryafter removing non-line-of-sight pathsrdquo
As this technique varies the deployed sensor densityrather than the propagation distance it is best used toestimate the precision and accuracy obtainable as a func-tion of the number of reporting sensors a known quantityin a forensic context It is less suitable for predicting thesensor density required to ensure good detection ratesunder non-ideal conditions The presence of wind raintraffic noise and similar background noise sources reducesignal-to-noise ratio Furthermore while the simulationshows that any set of six reporting sensors will yield accu-rate multilateration results implicit in the simulation isthat the reporting sensors are well-distributed since thesensors were randomly drawn from a set of participatingsensors that fully surround the shooter as shown in Fig-ure 13 Wind may refract the sound away from a givendirection entirely and some barriers (such as highwayembankments or sound walls) may attenuate the soundbelow the point of detectability potentially resulting ina situation where the shooter is far outside the convexhull of reporting sensors Because the effect is due tothe geometry of the receiver array the error of a multi-lateration solution can be estimated using the analyticalapproach of (Mathias et al 2008) or using Monte-Carlosimulation in which the shooter location is repeatedly re-computed after perturbing the input measurements ac-cording to the measurement error estimates in SectionIII Because of the high number of participating sensorsin the Pittsburgh live-fire test the data published in thepresent work provide a good basis for future study of theeffects of array geometry on location accuracy
VI CONCLUSION
Source location via acoustic multilateration is a well-developed technique that was reduced to practice duringthe First World War Inexpensive computation and cel-lular radio networks allow the use of these techniques byautomated systems to detect gunshots in near real time
For the sensor arrays considered the multilaterationalgorithm of (Mathias et al 2008) had the greatest pre-cision Use of a 3D straight-line propagation model (ei-ther unconstrained or constrained to the ground plane)
14 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 1
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 6
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
rela
tive
posi
tion
(m)
10
-10
-8
-6
-4
-2
0
2
4
6
8
relative position (m)10-10 -8 -6 -4 -2 0 2 4 6 8
shots
survey
Up to 4 reporting sensors Up to 8 reporting sensors Up to 12 reporting sensorsFiring Position 3
FIG 17 Location accuracy of randomly-generated reduced-density arrays determined using a Monte-Carlo simulation of 25
random arrays of participating sensors at each firing position These plots show performance with a maximum of 4 (left column)
8 (middle column) or 12 (right columns) sensors corresponding to a sensor density of 2 sensorskm2 to 6 sensorskm2 Firing
positions shown reflect those with highest sensor participation during the live fire test (FP1 top row) medium participation
(FP6 middle row) or low participation (FP3 bottom) See 18 for detection rates and location accuracy at all firing positions
These results show that the robustness of multilateration results is improved by deploying a sufficient number of sensors to
ensure good participation
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 15
Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

Frac
tion o
f incid
ents
10
00
01
02
03
04
05
06
07
08
09
Survey Error m25000 25 50 75 100 125 150 175 200 225
Survey error (m)
4
5
10
68
FIG 18 Cumulative distribution function (CDF) of simu-
lated detection accuracy with random arrays containing vary-
ing numbers of participating sensors The CDF for each simu-
lations is based on relocating all shots using 25 random arrays
comprising 4 5 6 8 or 10 participating sensors at each firing
position corresponding to a sensor density of approximately
2 sensorskm2 to 5 sensorskm2 The CDF of the live-fire test
from Figure 12 is included for comparison
did not significantly improve location accuracy over thesimpler 2D propagation model Under these conditionsacoustic multilateration provided a 2D accuracy between036 m to 644 m with respect to surveyed location and a2D precision (or relative accuracy) of 048 m to 282 mHigh relative accuracy is essential when performing foren-sic analysis of situations that may involve multiple shoot-ers The precision of elevation estimates was much lowerwith full 3D solutions yielding an RMS accuracy vs digi-tal elevation model of 178 m The array geometry testedwas not adequate to identify the elevation of shots firedfrom the upper stories of a building In coverage areaswhere firearm discharge from an elevated structure is ofconcern sensors should be positioned at both the roofand base of tall structures in the area to provide betterelevation precision
Detection on the minimum number of sensors re-quired (nominally three in two dimensions) can producean accurate result when acoustic paths are near line-of-sight but the fully-determined solution is not robust un-der the presence of timing errors Additional information(such as waveform analysis) must be used to estimate thelikelihood that the TDoAs are good estimates of the line-of-sight travel time With four sensors the presence of atiming error can be detected (since each 3-tuple producesa different solution) but not corrected With five or moresensors error-inducing multipath inputs may be identi-
fied and rejected Simulations with random sensor arraysshow that excellent precision and accuracy are reliablyobtained with arbitrary arrays of six reporting sensorsdrawn at random from a spatially-distributed set of par-ticipating sensors Detection rate and accuracy continueto improve as the number of participating sensors in-creases with additional sensors above six providing onlymarginal improvement The six-sensor criterion corre-sponds to a deployed sensor density of approximately3 sensorskm2 in the arrays studied a higher sensor den-sity is needed to ensure sufficient sensor participation inpractical deployments Higher density arrays help en-sure an adequate participating sensor count (preferablysix but at least three) in highly built-up areas at theedge of coverage areas or in adverse weather conditionsThe ideal sensor deployment configuration is one thatwill detect a high fraction of outdoor firearm dischargesfrom any part of the coverage area under all weather con-ditions and do so using a minimal number of sensors Amodel that incorporates the combined effects of struc-tures terrain foliage wind and ground reflection wouldbe of value in the design of effective economical sensorarrays for acoustic gunshot location and is a topic weseek to address in future work
ACKNOWLEDGMENTS
The authors thank the Pittsburgh Bureau of Po-lice for conducting a comprehensive live-fire test of theShotSpotter system in their community We also thankthe ShotSpotter Operations Team and Project ManagerAthnaiel Bazi in particular for designing deploying andmaintaining an effective array for gunshot detection
The authors are employed by and hold an ownershipinterest in ShotSpotter Inc
1Supplementary materials containing audio files pulse propertiesand tuples of near line-of-sight pulses for each shot that are suit-able for multilateration are currently available at httpsgithubcomShotSpotterresearchaccuracy-of-gunshot-location
Aguilar J R (2015) ldquoGunshot detection systems in civilian lawenforcementrdquo Journal of the Audio Engineering Society 63(4)280ndash291
Albert D G and Liu L (2010) ldquoThe effect of buildings on acous-tic pulse propagation in an urban environmentrdquo The Journal ofthe Acoustical Society of America 127(3) 1335ndash1346
Aubin D and Goldstein C (2014) The War of Guns and Mathe-matics Mathematical Practices and Communities in France andIts Western Allies Around World War I 42 144ndash149 (AmericanMathematical Society)
Beck S D (2019) ldquoWho fired when Associating multiple audioevents from uncalibrated receiversrdquo in Audio Engineering Soci-ety Conference 2019 AES International Conference on AudioForensics
Beck S D Nakasone H and Marr K W (2011) ldquoVaria-tions in recorded acoustic gunshot waveforms generated by smallfirearmsrdquo The Journal of the Acoustical Society of America129(4) 1748ndash1759
Begault D R Beck S D and Maher R C (2019) ldquoOverview offorensic audio gunshot analysis techniquesrdquo in Audio Engineer-ing Society Conference 2019 AES International Conference onAudio Forensics
16 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location
Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

Boashash B (2015) Time-frequency signal analysis and process-ing a comprehensive reference (Academic Press)
Brustad B M and Freytag J C (2005) ldquoA survey of audioforensic gunshot investigationsrdquo in Audio Engineering SocietyConference 26th International Conference Audio Forensics inthe Digital Age
Calhoun R B (2011) ldquoSystems and methods of processing im-pulses including bullet pulses andor muzzle pulses in associationwith time domain representationsrdquo US Patent 7961550
Calhoun R B (2013) ldquoSystems and methods with improvedthree-dimensional source location processing including constraintof location solutions to a two-dimensional planerdquo US patent8369184 (Feb 52013)
Don C G and Cramond A J (1987) ldquoImpulse propagation ina neutral atmosphererdquo The Journal of the Acoustical Society ofAmerica 81(5) 1341ndash1349
Embleton T F W (1996) ldquoTutorial on sound propagation out-doorsrdquo The Journal of the Acoustical Society of America 100(1)31ndash48
Finan J S and Hurley W J (1997) ldquoMcNaughton and Cana-dian operational research at Vimyrdquo Journal of the OperationalResearch Society 48(1) 10ndash14
Franke S J Raspet R and Liu C H (1988) ldquoNumerical pre-dictions of atmospheric sound-pressure levels in shadow zonesrdquoThe Journal of the Acoustical Society of America 83(2) 816ndash820
Friedlander F G (1946) ldquoThe diffraction of sound pulses idiffraction by a semi-infinite planerdquo Proceedings of the RoyalSociety of London Series A Mathematical and Physical Sciences186(1006) 322ndash344
He K Zhang X Ren S and Sun J (2016) ldquoDeep residuallearning for image recognitionrdquo in Proceedings of the IEEE con-ference on computer vision and pattern recognition pp 770ndash778
Hirsch K-W and Bertels W (2013) ldquoEstimation of the direc-tivity pattern of muzzle blastsrdquo Proc AIA-DAGA 961ndash963
Hornikx M (2016) ldquoTen questions concerning computational ur-ban acousticsrdquo Building and Environment 106 409ndash421
Hosier R N and Donavan P R (1979) ldquoMicrophone wind-screen performancerdquo Final Report National Bureau of Stan-dards Washington DC Acoustical Engineering Div
Kapralos B Jenkin M and Milios E (2008) ldquoSonel mappinga probabilistic acoustical modeling methodrdquo Building Acoustics15(4) 289ndash313
Lawrence D S La Vigne N G Goff M and Thompson P S(2018) ldquoLessons learned implementing gunshot detection tech-nology Results of a process evaluation in three major citiesrdquoJustice Evaluation Journal 1(2) 109ndash129
Le Bot A and Bocquillet A (2000) ldquoComparison of an integralequation on energy and the ray-tracing technique in room acous-ticsrdquo The Journal of the Acoustical Society of America 108(4)1732ndash1740
Lin I-C Hsieh Y-R Shieh P-F Chuang H-C and ChouL-C (2014) ldquoThe effect of wind on low frequency noiserdquo in43rd International Congress and Exposition on Noise ControlEngineering (Internoise 2014) Institute of Noise Control Engi-neering Vol 249 pp 1137ndash1148
Maher R C (2009) ldquoAudio forensic examinationrdquo IEEE SignalProcessing Magazine 26(2) 84ndash94
Maher R C (2011) ldquoAcoustical modeling of gunshots includingdirectional information and reflectionsrdquo in Audio EngineeringSociety Convention 131 Audio Engineering Society
Maher R C and Hoerr E (2018) ldquoAudio forensic gunshot anal-ysis and multilaterationrdquo in Audio Engineering Society Conven-tion 145 Audio Engineering Society
Maher R C and Routh T (2015) ldquoAdvancing forensic analysisof gunshot acousticsrdquo in Audio Engineering Society Convention139 Audio Engineering Society
Maher R C and Shaw S R (2010) ldquoDirectional aspects offorensic gunshot recordingsrdquo in Audio Engineering Society Con-ference 39th International Conference Audio Forensics Prac-tices and Challenges Audio Engineering Society
Mathias A Leonardi M and Galati G (2008) ldquoAn effi-cient multilateration algorithmrdquo in Digital Communications-Enhanced Surveillance of Aircraft and Vehicles 2008 TI-WDCESAV 2008 Tyrrhenian International Workshop onIEEE pp 1ndash6
Mehra R Raghuvanshi N Chandak A Albert D GKeith Wilson D and Manocha D (2014) ldquoAcoustic pulsepropagation in an urban environment using a three-dimensionalnumerical simulationrdquo The Journal of the Acoustical Society ofAmerica 135(6) 3231ndash3242
National Law Enforcement and Corrections Technology Center(2007) ldquoSpot the Shotrdquo TechBeat 1ndash2
Parker M Ketcham S and Cudney H (2007) ldquoAcoustic wavepropagation in urban environmentsrdquo in 2007 DoD High Perfor-mance Computing Modernization Program Users Group Confer-ence IEEE pp 233ndash237
Pasareanu S M Burdisso R A and Remillieux M C (2018)ldquoA numerical hybrid model for outdoor sound propagation incomplex urban environmentsrdquo The Journal of the AcousticalSociety of America 143(3) EL218ndashEL224
Pauli M Seisler W Price J Williams A Maraviglia CEvans R Moroz S Ertem M C Heidhausen E andBurchick D A (2004) ldquoInfrared detection and geolocation ofgunfire and ordnance events from ground and air platformsrdquoTechnical Report ADA460225
Raspet R Webster J and Dillion K (2006) ldquoFramework forwind noise studiesrdquo The Journal of the Acoustical Society ofAmerica 119(2) 834ndash843
Reddi S S (1993) ldquoAn exact solution to range computation withtime delay information for arbitrary array geometriesrdquo IEEETransactions on Signal Processing 41(1) 485ndash486
Remillieux M C Corcoran J M Haac T R Burdisso R Aand Svensson U P (2012) ldquoExperimental and numerical studyon the propagation of impulsive sound around buildingsrdquo Ap-plied Acoustics 73(10) 1029ndash1044
Routh T K and Maher R C (2016) ldquoRecording anechoicgunshot waveforms of several firearms at 500 kilohertz samplingraterdquo in Proceedings of Meetings on Acoustics 171 ASA ASAVol 26 p 030001
Schomer P D Raspet R Wagner M Walker D and MarshallD (1990) ldquoMethods for detecting low-frequency signals in thepresence of strong windsrdquo Technical Report ADA223980
Showen R (1997) ldquoOperational gunshot location systemrdquo inSurveillance and Assessment Technologies for Law EnforcementInternational Society for Optics and Photonics Vol 2935 pp130ndash140
Showen R L Calhoun R B Chu W C and Dunham J W(2008) ldquoAcoustic gunshot location in complex environmentsmdashconcepts and resultsrdquo in Sensors and Command Control Com-munications and Intelligence (C3I) Technologies for HomelandSecurity and Homeland Defense VII SPIE Vol 6943 pp694318ndash1ndash694318ndash11
Stevens F and Murphy D (2014) ldquoSpatial impulse responsemeasurement in an urban environmentrdquo in Audio EngineeringSociety Conference 55th International Conference Spatial Au-dio Audio Engineering Society
Van der Kloot W (2005) ldquoLawrence Braggrsquos role in the develop-ment of sound-ranging in World War Irdquo Notes and Records ofthe Royal Society 59(3) 273ndash284
Watkins C Green Mazerolle L Rogan D and Frank J (2002)ldquoTechnological approaches to controlling random gunfire Re-sults of a gunshot detection system field testrdquo Policing An In-ternational Journal of Police Strategies amp Management 25(2)345ndash370
Weber W (1939) ldquoDas schallspektrum von knallfunken undknallpistolen mit einem beitrag uber anwendungsmoglichkeitenin der elektroakustischen meszligtechnikrdquo PhD thesis Universityof Berlin
Wiener F M and Keast D N (1959) ldquoExperimental studyof the propagation of sound over groundrdquo The Journal of theAcoustical Society of America 31(6) 724ndash733
Wilson D K (2003) ldquoThe sound-speed gradient and refractionin the near-ground atmosphererdquo The Journal of the AcousticalSociety of America 113(2) 750ndash757
Wuttke J (1992) ldquoMicrophones and windrdquo Journal of the Audio
Engineering Society 40(10) 809ndash817
ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location 17
18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location

18 ShotSpotter Tech Note 098 14 January 2020 Accuracy of acoustic gunshot location