Embed Size (px)
Citation preview

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
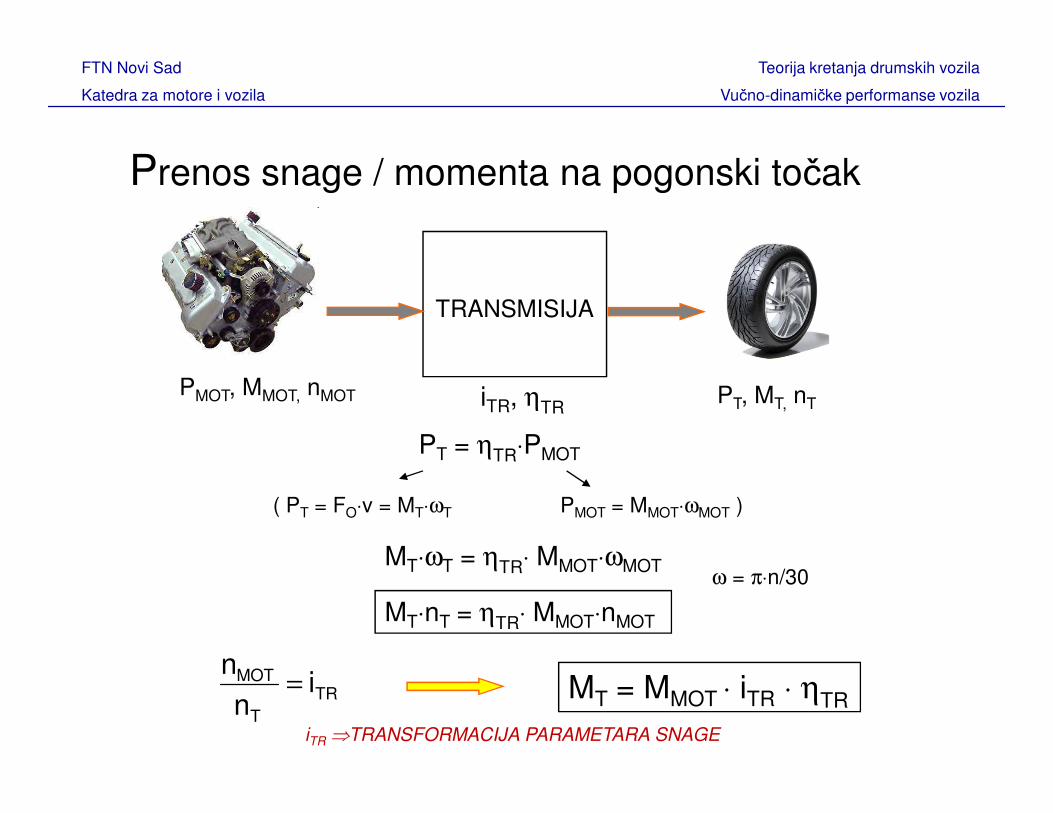
Prenos snage / momenta na pogonski točak
TRANSMISIJA
P , M n
Transmisija ⇒ • transformacija M i n pri prenosu od motora do točka (iTR)• energetski gubici (ηTR < 1)
PMOT, MMOT, nMOT PT, MT, nTiTR, ηTR
NE BRKATI iTR I ηηηηTR !!
Prenos snage i transformacija njenih parametara – ZADATAK TRANSMISIJEGubici snage pri prenosu – NEŽELJENA NEMINOVNOST
parametri snage parametri snage
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Prenos snage / momenta na pogonski točak
PMOT, MMOT, nMOT
TRANSMISIJA
PT, MT, nTiTR, ηTRPT, MT, nT
PT = ηTR⋅PMOT
MT⋅ωT = ηTR⋅ MMOT⋅ωMOT
MT⋅nT = ηTR⋅ MMOT⋅nMOT
( PT = FO⋅v = MT⋅ωT PMOT = MMOT⋅ωMOT )
iTR, ηTR
TRT
MOT in
n= MT = MMOT ⋅ iTR ⋅ ηTR
ω = π⋅n/30
iTR ⇒TRANSFORMACIJA PARAMETARA SNAGE

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
M
m+GP
M
m
M
m
GP
Stepen korisnosti transmisije
Šeme transmisije - primeri
POGON NAPRED POGON NAZAD 4X4
Otpori transmisije – “unutrašnji” otpori kretanja
Transmisija = sistem mehaničkih
GP
RGP
GP
KPKP
M – motor, m – menjač, GP – glavni prenosnik, KP – kardanski prenosnik, R – razvodnik snage
mehaničkih prenosnika

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Stepen korisnosti transmisijeGubici snage u transmisiji: opšti oblik bilansa snage mehaničkih prenosnika
OZNAČAVANJE: POZNAČAVANJE: PIZL,KORIZL,KOR →→→→→→→→ PPIZLIZL
PUL = PIZL,UK!!!
PIZL,UK = PIZL,KOR + PIZL,GUB
PIZL < PUL
PIZL = η⋅η⋅η⋅η⋅ PUL, ηηηη < 1
ZAKON ODRŽANJA ENERGIJE!

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
η =
Primer:
η = 0.95
PIZL
PUL
PIZL = PUL – PGUB
PGUB
PIZLPUL η
Otpori kulonovog trenja, viskozni otpori
Stepen korisnosti transmisije
PRENOSNIK
η = 0.95
PUL = 100 kW
PIZL = 95 kW
PGUB = 5 kW
Zupčanici, ležajevi, zaptivni pstenovi...
ηηηηTR = ηηηη1 · ηηηη2 · ηηηη3 ... · ηηηηn
η1 η2 ... ηn
PULPIZL
Ukupni stepen korisnosti transmisije
Stepen korisnosti sistema sačinjenog od više komponenata:

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
PRIMERI
AUDI A4 2.0 MULTITRONIC 0,87AUDI A4 3.0 QUATTRO 0,87BMW 320 D 0,90BMW 530i Automatic 0,83
Stepen korisnosti transmisije
IZVOR: WWW.RRI.SE
Gubici transmisije rastu, odnosno ηTR opada, kada:
• je transmisija kompleksnija (sadrži veći broj komponenata
BMW 530i Automatic 0,83BMW X5 Automatic 0,83CITROEN BERLINGO 1,8 0,93FIAT GRANDE PUNTO 1,4 0,88HONDA ACCORD (’06.) 0,93NISSAN PRIMERA 2.0 CVT 0,77PEUGEOT 307 0,90RENAULT MEGANE SPORT (’05.) 0,95GOLF V 1,6 0,91
(sadrži veći broj komponenata – npr. vozila 4x4)
• se koriste pojedinačne komponente nižeg stepena korisnosti (frikcioni i hidrodinamički prenosnici, pužni parovi itd.)
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
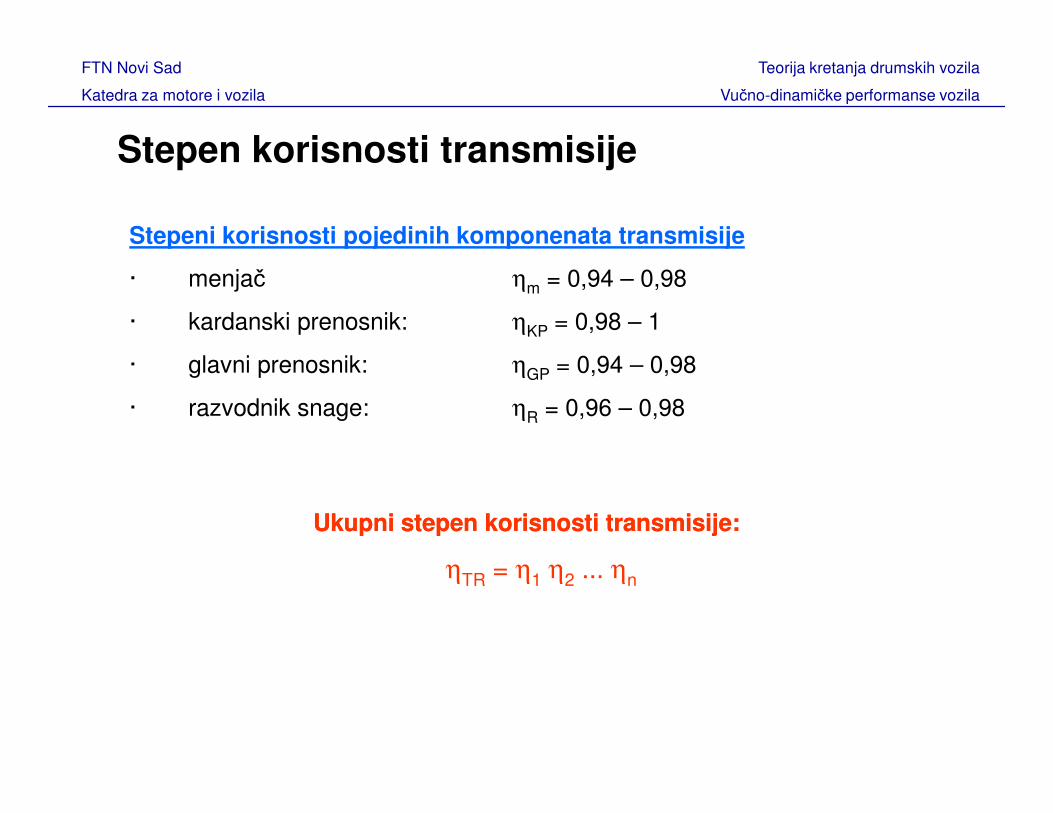
Stepeni korisnosti pojedinih komponenata transmisije
· menjač ηm = 0,94 – 0,98
· kardanski prenosnik: ηKP = 0,98 – 1
· glavni prenosnik: ηGP = 0,94 – 0,98
· razvodnik snage: η = 0,96 – 0,98
Stepen korisnosti transmisije
· razvodnik snage: ηR = 0,96 – 0,98
Ukupni sUkupni stepen korisnosti transmisije:tepen korisnosti transmisije:
ηTR = η1 η2 ... ηn

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
M
m+GP
M
m
M
m
RGP
KPKP
Stepen korisnosti transmisije
POGON NAPRED
POGON NAZAD
GP GP
KP
1. ηTR = ηm ηGP 2. ηTR = ηm ηGP ηKP
3. ηTR = ηm ηGP2 ηR ηKP
~ 0,93 ~ 0,9 ~ 0,87
4X4

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Prenosni odnos transmisije
IZL
UL
nn
i = →→ PRENOSNI ODNOSPRENOSNI ODNOS
P = η⋅P ⇒ M = η⋅i⋅M
in
n ULIZL =
PIZL = η⋅PUL ⇒ MIZL = η⋅i⋅MUL
UL
IZL
IZL
UL
MM
nn
i⋅
==η
i > 1 → REDUKCIJA
i < 1 → MULTIPLIKACIJA
Veće i → “kraći” prenos
Manje i → “duži” prenosOdnosi se na broj obrtaja!

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Prenosni odnos transmisije
Veći prenosni odnos (“kraći prenos”) → veći momenti, manji brojevi obrtaja
UL
IZL
IZL
UL
MM
nn
i⋅
==η
Veći prenosni odnos (“kraći prenos”) → veći momenti, manji brojevi obrtaja
Manji prenosni odnos (“duži prenos”) → manji momenti, veći brojevi obrtaja

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Prenosni odnos transmisije
PRENOSNI ODNOS SERIJSKI VEZANIH PRENOSNIKA
MUL, nUL MIZL, nIZL
...
i1, ηηηη1
i2, ηηηη2 i3, ηηηη3ik, ηηηηk
MIZL = ηUK⋅iUK⋅MULUK
ULIZL i
nn =
iiUKUK = i= i11⋅⋅ii22⋅⋅ii33⋅⋅......⋅⋅iik k
ηηUK UK = = ηη11⋅η⋅η22⋅η⋅η33⋅⋅......⋅η⋅ηk k
PIZL = ηUK⋅PUL

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Prenosni odnos transmisije
MENJAČ
im = iI, iII, iIII, iIV, ... – ZA SVAKI STEPEN PRENOSASTEPEN PRENOSA →→→→
ODGOVARAJUĆI PRENOSNI ODNOSPRENOSNI ODNOS

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Prenosni odnos transmisije
ULAZNI ELEMENT: MOTOR (P, M, n)
IZLAZNI ELEMENT: TOČAK (PT, MT, nT)
ULAZNI I IZLAZNI ELEMENT PRI PRENOSU SNAGE KOD MOTORNIH VOZILA
ni = → UKUPNI P.O. TRANSMISIJE, PREMA DEFINICIJI!
TTR n
ni = → UKUPNI P.O. TRANSMISIJE, PREMA DEFINICIJI!
MT = ηTR⋅iTR⋅MTR
T in
n =
MT tj. PT PREDSTAVLJA SUMU SVIH MOMENATA /
SNAGA DOVEDENIH NA SVE POGONSKE TOČKOVE!
PT = ηTR⋅P

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
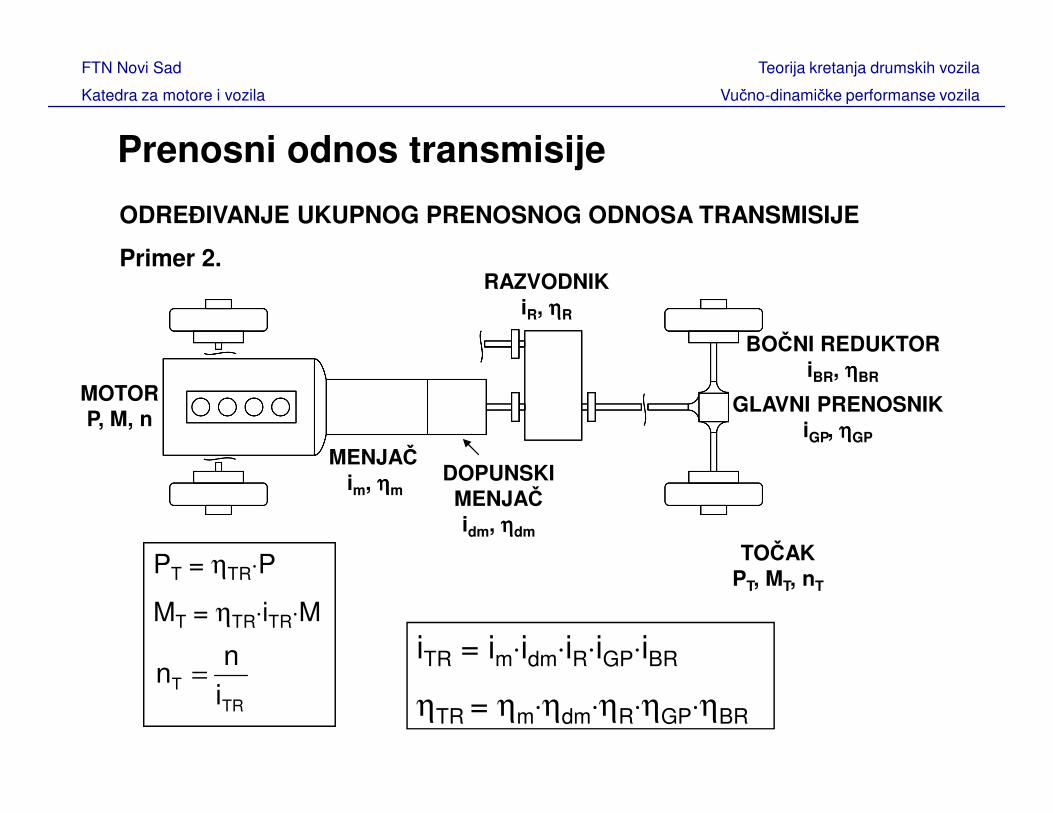
Prenosni odnos transmisije
ODREĐIVANJE UKUPNOG PRENOSNOG ODNOSA TRANSMISIJE
Primer 1.
GLAVNI PRENOSNIKiGP, ηηηηGP
MOTORP, M, n
MENJAČim, ηηηηm
iGP, ηηηηGP
TOČAKPT, MT, nT
MT = ηTR⋅iTR⋅M
TRT i
nn =
SUMARNO!
iTR = im⋅iGP
ηTR = ηm⋅ηGPim = iI, iII, iIII,...
PT = ηTR⋅P
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Prenosni odnos transmisije
ODREĐIVANJE UKUPNOG PRENOSNOG ODNOSA TRANSMISIJE
Primer 2.
MOTORP, M, n
GLAVNI PRENOSNIK
BOČNI REDUKTORiBR, ηηηηBR
RAZVODNIKiR, ηηηηR
P, M, n
MENJAČim, ηηηηm
GLAVNI PRENOSNIKiGP, ηηηηGP
TOČAKPT, MT, nT
MT = ηTR⋅iTR⋅M
TRT i
nn =
iTR = im⋅idm⋅iR⋅iGP⋅iBR
ηTR = ηm⋅ηdm⋅ηR⋅ηGP⋅ηBR
PT = ηTR⋅P
DOPUNSKI MENJAČidm, ηηηηdm

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Brzinska karakteristika motora
Zavisnost izlaznih parametara (Zavisnost izlaznih parametara (P, M, gP, M, ghh...) od broja obrtaja motora n....) od broja obrtaja motora n.
P = M⋅ω (W, Nm, rad/s)
30
nω
⋅=
π2π rad = 360°
Kada je: broj obrtaja motora n=n1 ⇒⇒⇒⇒
tada je: obrtni moment koji motor može da proizvede: M=M1
P = MP = M⋅⋅⋅⋅⋅⋅⋅⋅n / 9554 (kW)n / 9554 (kW)
30
PP
MM

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
M
Radni režim motora – M ili P, n
NESTACIONARNO STANJE – menja se u vremenu!
Motor nema jednu vrednost za brzinu i snagu, nego se one menjaju u nekom intervalu!
Šta određuje snagu tj. moment i broj obrtaja motora?
R=R(ωωωω) – BRZINSKA KARAKTERISTIKA. OTPORA
M
ω (=π⋅n/30)
M=M(ωωωω) – BRZINSKA KAR. MOTORA
STACIONARNA RADNA TAČKA
RADNA TAČKA MOTORA
RADNA TAČKA OTPORA

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Brzinska karakteristika motora
Spoljna karakteristika i parcijalne karakteristike
MAX (100%)
80%
50%
30%
M (Nm)
n (o/min)
v (km/h)
REGULACIJA BRZINE KRETANJA

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
dω
dtJo⋅ =ΣMi
dω
dtΣMi > 0 ⇒ > 0
MOTOR UBRZAVA
R =f (n)
R2=f2(n)
NESTABILNO STABILNO
M
Stabilnost radnog režima
dω
dtΣMi = 0 ⇒ = 0
dωdt
ΣMi < 0 ⇒ < 0
STACIONARNO STANJE
MOTOR USPORAVA
R1=f1(n)
n
Kriva M=M(n)

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
STABILNO
M
R3=f3(n)
HIPERBOLA: PωM =
Idealna pogonska karakteristika - hiperbola
P=constP=const
R1=f1(n)
R2=f2(n)
ω

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Prenos snage na pogonske točkove
PARAMETRI SNAGEPARAMETRI SNAGE
P = P = FF⋅⋅⋅⋅⋅⋅⋅⋅v v = = MM⋅ω⋅ω⋅ω⋅ω⋅ω⋅ω⋅ω⋅ω PPIZLIZL = = η⋅η⋅η⋅η⋅η⋅η⋅η⋅η⋅PPULUL
PODSETNIK:PODSETNIK:
PARAMETRI SNAGEPARAMETRI SNAGE
PRENOŠENJE SNAGE OD MOTORA SUS DO POGONSKOG TOČKAPRENOŠENJE SNAGE OD MOTORA SUS DO POGONSKOG TOČKA
→→TRANSFORMACIJA PARAMETARA, UZ GUBITKETRANSFORMACIJA PARAMETARA, UZ GUBITKE
Svrha: prilagođavanje parametara motora uslovima kretanja

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Prenos snage na pogonske točkove
ZA ZADATI REŽIM MOTORA (M,n)ZA ZADATI REŽIM MOTORA (M,n)
TREBA ODREDITI FTREBA ODREDITI FOO I vI v
MOTOR:
M
TOČAK:
MTRANSMISIJA
M
n
MT
nT
iTR, ηTR
MT →→→→ FO
nT →→→→ v
Zavisnost (M,n)
= Brzinska karakteristika motora
Zavisnost (FO,v)
= Vučno-brzinska karakteristika vozila
PARAMETRI REŽIMA RADA MOTORA PARAMETRI REŽIMA
KRETANJA VOZILA
FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
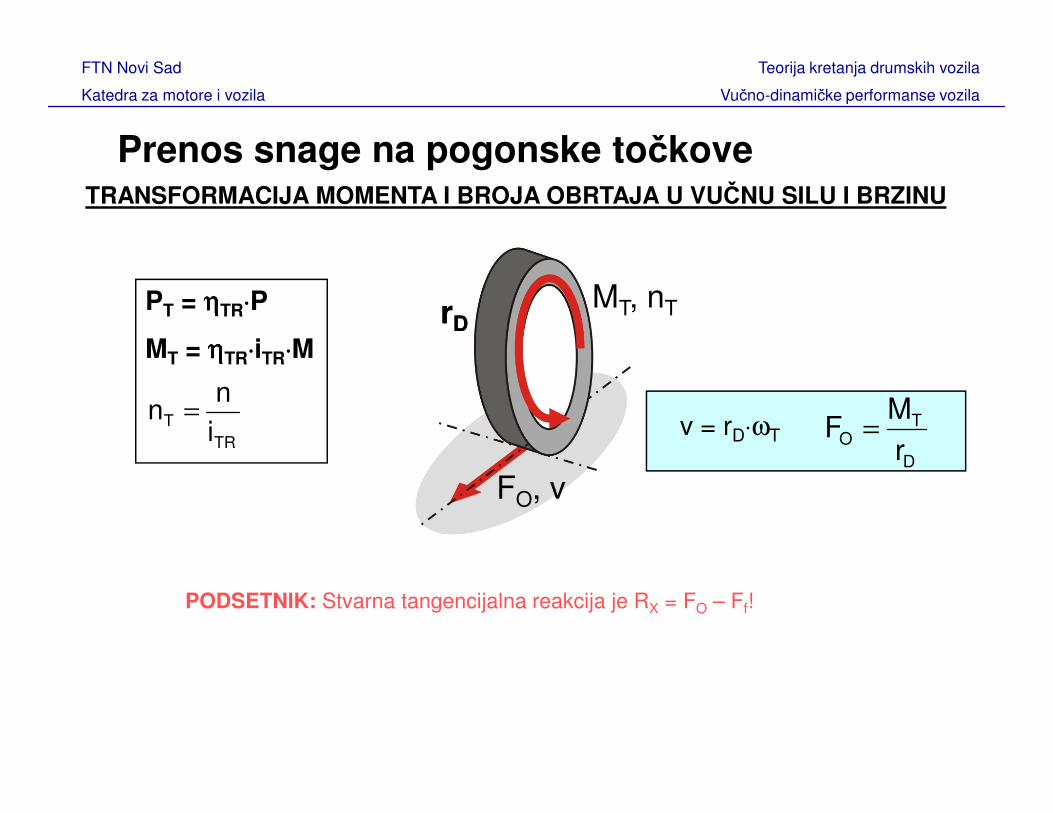
Prenos snage na pogonske točkove
M
MT, nTrrDDMT = ηηηηTR⋅⋅⋅⋅iTR⋅⋅⋅⋅M
nn =
PT = ηηηηTR⋅⋅⋅⋅P
TRANSFORMACIJA MOMENTA I BROJA OBRTAJA U VUČNU SILU I BRZINU
D
TO r
MF =
FO, v
PODSETNIK: Stvarna tangencijalna reakcija je RX = FO – Ff!
v = rD⋅ωTTRT i
nn =

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Prenos snage na pogonske točkove
D
TO r
MF =
MT, nTrrDD TRT i
nn =
v = rD⋅ωT
MT = iTR⋅M⋅ηTR
TRANSFORMACIJA MOMENTA I BROJA OBRTAJA U VUČNU SILU I BRZINU
D
FO, v30
nω T
T
⋅=
πv →→→→ km/h !
D
TRTRO r
iMF
η⋅⋅=
TR
D
inr0,377
v⋅⋅
=

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
“Preslikavanje” karakteristike sa motora na točak
M(n) FO(v)
n v
iimm = const= const
D
TRTRO r
iMF
η⋅⋅=
TR
D
inr0,377
v⋅⋅
=
VUČNO-BRZINSKA KARAKTERISTIKA
Jedina nezavisno promenljiva Jedina nezavisno promenljiva →→ n!n! (M = M(n) ⇒ FO = FO(n)!)
n ⇒⇒⇒⇒ M
⇓⇓⇓⇓ ⇓⇓⇓⇓
v FO

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
M
FO VEĆE iTR
iTR↑ ⇒ FO ↑, v ↓
“Preslikavanje” karakteristike sa motora na točak
M
n
v
D
TRTRO r
ηiMF
⋅⋅=
TR
D
inr0,377
v⋅⋅
=
MANJE iTR

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
1500
2000
2500
100
120
140
160
nn→→→→→→→→vvMM→→→→→→→→FFOO
Primer: i=3,42·1,38; rD=0,285m;
“Preslikavanje” karakteristike sa motora na točak
0
500
1000
1500
0 20 40 60 80 100 120 140 160 180 200 220
v (km/h)F
o(N
)
0
20
40
60
80
100
0 1000 2000 3000 4000 5000 6000 7000
n(o/min)
M(N
m)
GPm
D
iir
v⋅⋅
=ω
INTERVAL BRZINE VOZILA
D
TRGPm0 r
iiMF
η⋅⋅⋅=
RADNI INTERVAL MOTORA
ZA ODREĐEN PRENOSNI ODNOS

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Idealna i stvarna pogonska karakteristika
≠≠Dakle:1) Nedovoljna širina radnog intervala motora SUS2) Nepovoljan oblik karakteristike

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
M
FO im = iI
im = iII
im = iIII
Karakteristika zajedničkog rada motora SUS i menjačkog prenosnika
iimm ≠≠≠≠≠≠≠≠ constconst
n
v
im = iIV

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
FO(v)
≈FO(v)
Karakteristika zajedničkog rada motora SUS i menjačkog prenosnika
v
≈v

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
M
FO im = iI
im = iII
Vučno-brzinska karakteristika
Raspoloživa vučna sila na točku u funkciji brzine kretanja vozila
im↑ ⇒ FO ↑, v ↓M
n
v
im = iII
im = iIII
im = iIV
VUČNO-BRZINSKA KARAKTERISTIKA – VUČNI DIJAGRAM
i1 > i2 > i3 > ...
D
TRTRO r
iMF
η⋅⋅=
TR
D
inr0,377
v⋅⋅
=

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
FO(v)
Idealna hiperbola vuče
Idealna hiperbola: hipotetička kriva obimne sile za slučaj mogućnosti iskorišćenja maksimalne raspoložive snage motora – P u svim režimima
PT=FO⋅v(W, N, m/s)
⇓
3600vF
P OT
⋅=
(kW, N, km/h)P
v
– Pmax u svim režimima kretanja
(kW, N, km/h)
⇓
vP3600
F TO
⋅=
vP3600
F TRMAXOid
η⋅⋅=
P
v
P = PMAX = const
Stvarna kriva P(v)PT = PTMAX
PTMAX

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Vučno-brzinska karakteristika
6000
7000
8000
9000
10000
Idealna hiperbola vuče
Primer
0
1000
2000
3000
4000
5000
0 20 40 60 80 100 120 140 160 180 200
v (km/h)
F (N
)
Važna osobina: idealna hiperbola tangira stvarne krive vuče u tačkama koje odgovaraju broju obrtaja PMAX – tu je ispunjen uslov prema kom je idealna hiperbola definisana!

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
FO = (M(n)⋅im⋅iGP ⋅ηtr) / rD
v = (0,377⋅rD⋅n) / im⋅iGP
FO(N)
FOI
FOid
0
50
100
150
200
250
300
0 1000 2000 3000 4000 5000 6000 7000
0
10
20
30
40
50
60
70
80
90
100
Vučno-brzinska karakteristika
Idealna hiperbolaim=iI
VUČNI DIJAGRAM
v (km/h)
FOII
FOIII
FOIV
FO
V
im=iV
FOTP = Ff + FW
im=iII
im=iIII
im=iIV

FTN Novi Sad
Katedra za motore i vozila
Teorija kretanja drumskih vozila
Vučno-dinamičke performanse vozila
Vučno-brzinska karakteristika
Vučno-dinamičke karakteristike vozila:
• Maksimalna brzina
• Mogućnost savlađivanja uspona
• Ubrzanje, vreme i put zaleta• Ubrzanje, vreme i put zaleta