Embed Size (px)
Citation preview

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 1/21
1
Task Planning for Human-RobotInteraction
R. Alami, A. Clodic, V.Montreuil,
E.A. Sisbot, R. Chatila,
LAAS-CNRS
Toulouse - France
Smart Objects & Ambient Intelligence conference (sOc -EuSAI), 12th-14th October 2005, Grenoble, France
2
The COGNIRON Project
the COGNItive Robot companiON

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 2/21
3
The Personal Robot Assistant
Interaction is not limited to an interface
The robot should be able to operate in an
environment which has been essentially
designed for humans.
The robot will have to perform its tasks in
the presence of humans and to interactwith them.
4
Robot Decisional Issues for HRI
We have to re-visit some of the robot
decisional capabilities:
Explicit reasoning on its abilities (reflexivity)
Explicit reasoning on interactive task performance
Besides design choices, it is necessary to endowthe robot with the ability to take explicitly intoaccount the presence of humans.

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 3/21
5
Our first studies in this way
Design of the robot supervisor
How to represent humans in the supervisor of the
robot ?
How to make decisions with this representation ?
Human Aware Task Planning (HATP)
How to consider human preferences and social rules inthe task planning system ?
Human Aware Motion Planning (HAMP)How to make the robot move in a comfortable way for
humans ?
6
I. Design of the robot supervisor
How to represent humans in thesupervisor of the robot ?
How to make decisions with thisrepresentation ?

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 4/21
7
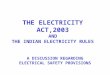
A Control Architecture
3. Functional and execution level(action execution;
dynamic organization)
2. Validation and execution control(action coordination)
1. Decision level(planning and supervision)
Logical system
Robot: Hardware platform
mission report
Environment
N
S
W E
Processingcomponents
GenoM
ExecutiveKheops +Transgen
Supervisor Planner
Propice+
IxTeT
Data processing,Control, …
8
What is specific in our problem ?
We want a framework that allows therobot:
To acquire its goals.
To accomplish its tasks.
To produce behaviors that support itsengagement vis-à-vis its humans partnerand interpret similar behaviors from him.
To follow human task performance.
To monitor and influence humancommitment to the common goal.

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 5/21
9
InterAction Agent (IAA)
10
InterAction Agent (IAA)

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 6/21
11
InterAction Agent
(IAA) “InterAction Agents” (IAAs),similar to proxies,implemented onthe robot side as arepresentative of ahuman agent
InterAction Agent (IAA)
12
IAA Manager
IAA Manager:
An IAA (InterAction Agent) is createddynamically and maintained by the "IAA Manager”
Several types of IAA (various abilities)
Actions
Needs, preferences
Determines how the robot behave with respect tothe IAA

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 7/21
13
Our framework
EXECUTION
LEV
EL
ROBOT SUPERVISIONKERNEL
AGENDA
INTERACTION AGENTS MANAGER
TASKDELEGAT
E1
TASKDELEGAT
E2
On-goingtasks
representation
OBSERVER
T1 IAA1
ACTIONS
IAA 1 IAA 2
...
...
Data aboutrobot actionsand context
Task needsUpdate
Data Abouthumans
OBSERVER
T2 IAA2
OBSERVER
T1 IAA2
DataUpdate
IAA Data
{Gactive,Gsuspended} Reports on active goals
IAAs state
Update
14
SimulationGoal Manager
Human-Aware Task Planner Decisional Kernel
IAA Manager

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 8/21
15
SimulationGoal Manager
Human-Aware Task Planner Decisional Kernel
IAA Manager
16
Simulation
IAA
Goal Manager
Human-Aware Task Planner Decisional Kernel
IAA Manager

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 9/21
17
Simulation
IAA
goal
Goal Manager
Human-Aware Task Planner Decisional Kernel
IAA Manager
18
Simulation
IAA
goal
Goal Manager
Human-Aware Task Planner Decisional Kernel
IAA Manager

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 10/21
19
Simulation
IAA
goal
Goal Manager
Human-Aware Task Planner Decisional Kernel
IAA Manager
20
Simulation
IAA
goal
Task
Delegate.
Observing human activity
Estimating human commitment level to a joint goal…
Goal Manager
Human-Aware Task Planner Decisional Kernel
IAA Manager

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 11/21
21
II. Human Aware Task Planning
(HATP)
How to consider human preferencesand social rules in the task planningsystem ?
22
To plan with human preferencesModel of an actor a
i(human or robot) :
Mai
= {<Ai,C
i(ctxt)>}
Ai= an action (operator)
Ci(ctxt) = context-dependent cost associated to Ai.
Costs meaningFor a robot: difficulty to realize the action (slowness,
computational time needed, etc...)
For a human: mix between difficulty to realize theaction and gratification/pleasure to do it.
Idea⇒ Make a plan with the least cost

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 12/21
23
Operator example (in SHOP2)(:operator (!put ?name ?thing)
;; precondition
((actor ?name) (thing ?thing) (place ?place)(has ?name ?thing) (at ?name ?place)(drop_cost ?name ?cost))
;; delete list
((has ?name ?thing))
;; add list
((on ?thing ?place))
;; cost?cost
)
24
To plan with social rules
Undesirable states:
Pstates = {<S j,C j(ctxt)>}
If the plan implies a passage by S j, the correspondingcontext-dependent cost C j(ctxt) is added to the total
plan cost.
Undesirable sequences:
Psequences
= {<Sk ,CO
k ,C
k (ctxt)>}
If the plan contains an undesirable sequence of actions
Sk under the conditions COk , the correspondingcontext-dependent cost Ck (ctxt) is added to the total
plan cost.

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 13/21
25
Social rules examples (1/2)
Undesirable states:Description of the state:
S1 = ((has ?name ?obj1) (has ?name ?obj2)
(food ?obj1) (clean_object ?obj2))
Cost value:
C1 = 20 if ((mop ?obj2))= 10 else
26
Social rules examples (2/2)
Undesirable sequences:
Description of the sequence:
Sk = ((!drop ?name1 ?obj) (!take ?name2 ?obj))
Conditions:
COk = ((robot ?name1) (human ?name2))
Cost value:
C1 = 20 if ((= ?name1 BOB))
= 10 else

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 14/21
27
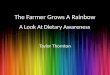
HATP plan example
A classical plan produced by SHOP2
Move fromsofa to
cupboard
Opencupboard
Bob
Robot
Move fromdoor to
cupboard
Take
glass
Move fromcupboard
to sofa
Give
glassto Bob
Move fromcupboard
to sofa
Move from
sofa totable
Take
bottle
Move from
table tosofa
Put
bottleon sofa
Takebottle
28
HATP plan example
A plan produced by HATP (in SHOP2)
Move fromsofa to
cupboard
Opencupboard
Bob
Robot
Move fromdoor totable
Takebottle
Move fromtable to
sofa
Takeglass
Givebottleto Bob
Closecupboard
Move fromcupboard
to sofa

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 15/21
29
III. Human Aware Motion Planning
(HAMP)
How to make the robot move in acomfortable way for humans ?
30
Key points for HAMP
Physical safety
The robot must avoid to injure physicallyhumans:
At the hardware level: round joints, lightand soft material.
At the software level: control on distance,speed, etc.
Mental safetyThe robot must move in a natural wayfor humans (constraints on robot headdirection, etc...).
The robot must avoid to surprise

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 16/21
31
Environment representation
Home environment: 2D grid with forbidden
zones for static objects.
The cell (i,j) of the grid is associated with a
cost ai,j.
More ai,j
is greater, more the robot should
avoid the cell (i,j).
ai,j
is computed by merging several criteria.
Each criterion is represented by a numericalpotential field.
32
Physical Safety of humans
Safety criterion: control on the distance
between the robot and humans.
Costs for safety criterion:
Inversely proportional to the distance.
Human position (standing or sitting).

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 17/21
33
Mental Safety of humans
Visibility criterion: keeping the robot in the
human field of view.
Costs for visibility criterion:
Inversely proportional to the distance with thehigher cost at the human head.
34
Mental Safety of humans
Hidden zones: to prevent the robot to be
hidden behind obstacles.
Costs for visibility criterion:
Based on the humanhead direction andposition of theobstacles.
Inverselyproportional to thedistance.

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 18/21
35
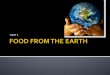
Merging the criteria
With the 3 criteria we compute a final grid:
For visible zones: ai,j = Costmerged(i,j).Costmerged(i,j) can be computed in 2 ways:
Costmerged(i,j) = max( CostS(i,j) , Cost V(i,j) )
Costmerged(i,j) = w1 * CostS(i,j) + w2 * Cost V(i,j) )
For hidden zones: ai,j = w3 * CostHZ(i,j).
Algorithm A* to find a path in the final grid.
36
Example of a final grid

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 19/21
37
planner
38
Ot er resu ts (1 3)

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 20/21
39
Other results (2/3)
40
Ot er resu ts (3 3)

7/30/2019 Pres 81
http://slidepdf.com/reader/full/pres-81 21/21
41
Future Work
Refinement of the framework
Dialogue
Learning
Improvement of HATP:introduce uncertainty
Improvement of HAMP:
conversion to a 3D-planner
Implementation on a tour-guide
robot