Embed Size (px)
DESCRIPTION
Sensor Network-Based Countersniper System Gyula S, Gyorgy B, Gabor P, Miklos M, Branislav K, Janos S, Akos L, Andras N, Ken F. Presented by Vikram Reddy. Outline. Problem and solution Architecture Middleware Conclusion Limitations. Problem and challenges. - PowerPoint PPT Presentation
Citation preview

Sensor Network-Based Countersniper System
Gyula S, Gyorgy B, Gabor P, Miklos M, Branislav K, Janos S, Akos L, Andras N, Ken F
Presented by Vikram Reddy

Outline
• Problem and solution• Architecture • Middleware• Conclusion• Limitations

Problem and challenges
– To locate snipers in urban environments.
– Work with constraints of the urban environment
• Multipath effects• Poor coverage due to
shading effect of buildings– Limitations of existing
systems• Require direct line of sight• Rely on muzzle flash that
can be suppressed• Centralized system not
tolerant to sensor failure– Cost effectiveness

Solution– Use an ad-hoc wireless sensor network-based system– Utilize many cheap sensors for
• good coverage of direct signal• tolerance to failures
– Detect via acoustic signals like muzzle blasts and shockwaves

PinPtr - System Architecture• Ad-hoc wireless network of inexpensive sensors• Sensors can
– detect muzzle blasts and acoustic shockwaves– Measure their time of arrival (TOA)
• Message routing service delivers TOA to a base station
• User Interface through base stations or PDAs• System field tested at the US Army McKenna
MOUT (Military Operations in Urban Terrain) facility at Fort Nenning, GA

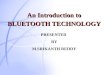
Custom Sensor Board and Mica2 Mote
Middleware
PinPtr Application
Operating System
Hardware
•Time synchronization•Message routing•Data aggregation
•Tiny OS (UC Berkeley)•Task scheduling•Radio communication•Clocks and timers
•I/O•Power management
•Mica Mote•Microcontroller•Multichannel receiver•4KB RAM, 128KB Mem•Extension Interface
•Acoustic Sensor Board•3 acouastic channels•FPGA
•Signal Processing•Measure TOA

Time synchronization• Flooding Time Synchronization Protocol (FTSP)
• Synchronize local clock to clock of selected root node• Time stamping broadcasted radio message multiple times at
sender and receiver nodes• Compensates for clock skew by linear regression• Time stamps made when sending/receiving individual bytes
thus reducing uncertainties of encoding/decoding and interrupt handling times
• Final error corrected value embedded into message before end of transmission
• Estimate global time by synchronizing with nodes a level above
• Less communication overhead

Time Synchronization
• Alternate algorithm– Power conservation– Does not require
continuous radio broadcast to synch time
– Use data packets for time synch
– Each node adds an age = (prev age) + (time pkt resent – time pkt received)
– Time of event = T(recv) - age

Routing• Gradient-Based best effort converge-cast
protocol– Assign a root node– Route data from all nodes to the root node– Each node rebroadcasts data packets upto 3
times– Data packets reach the root through multiple
paths– Fast and robust– Does not guarantee message delivery– Has significant message overhead

Sensor Localization• Localization of a node refers to the problem of
identifying its spatial co-ordinates in some co-ordinate system.
• Passive acoustic sensor localization– Use external acoustic sources– In sniper scenario estimate sensor location
through shots rather than sniper location with sensors
– Produce shots at known locations and known times

Other Services
• Signal Detection - Angle of Arrival and Time Difference of Arrival – Not practical because exact orientation of the board must be known. - Uses Time of Arrival and data fusion. • Sensor Data Fusion

Performance Results
• Experimental setup– 56 motes– 20 different known
shooter positions were used
– 171 shots were fired

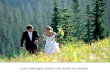
Performance Results• Shooter localization error
– Elevation info eliminated for 2D
– 3D errors are more as sensors were mostly positioned on the ground
• Error Sources– Time Synchronization
errors– Sensor localization errors

Performance Results
• Sensor Density– Effects signal detection– Increases shooter localization error

Future Work and Conclusion• Future Work
– Provide power management– Support multiple shots with sensor fusion algorithm– Use post-facto time synchronization to conserve power– Use system in other Concepts of Operations
• Reconnaissance missions• Protect convoy routes
– Work on sensor self-localization techniques• Conclusion
– PinPtr provides a counter-sniper system– Provides efficient algorithms for time synchronization
and shooter/sensor localization– Good experiment to reassure actual deployment

Limitations/Discussion• Since PinPtr does not employ shockwave signals and
relies on muzzle blast it may not work when silencers are used
• Deployment of sensors in an actual urban environment is not trivial
• Does not provide for power conservation hence battery life can be an issue since these systems typically need to be available always
• Cannot deal with multiple shots fired by multiple snipers• No self-localization performed hence cannot dynamically
configure with change in number of sensors