Embed Size (px)
Citation preview

Principle and Maintenance of DK1050S
Contents
l Chapter One
Introduction to DK1050S 1. Functions 2. Complete-machine diagram 3. IC components of complete machine
l Chapter Two
Working principle of servo circuit 1. Digital signal processing 2. Control signal processing
l Chapter Three
Working principle of decoder circuit 1. System control circuit 2. Audio/video frequency circuit
l Chapter Four
Working principle of power switch 1. Diagram of components
2. Principle of circuit
l Chapter Five
Working principle of panel control 1. Working principle
Typical trouble shooting process
Appendix: Introduction to IC Information and Circuit diagram

Analysis of Working Principle of DK1050S
Chapter One Introduction to DK1050S
1. Functions
DK1050S is a medium- low-end machine integrating disk player and amplifier.
Its main features are:
1). Disk player uses “Sanyo loader + MT1389” scheme;
2). Amplifier uses digital power amplification circuit, low distortion; power IC is TAS5112DFD;
3). Audio processor is TAS5508, high integration and good performance/price ratio;
4). With radio function; save-up to 40 radio stations
5). Power uses switch-mode power design with small volume, high efficiency and stable
performance;
6). With SCART (CVBS/RGB) interface;
7). Auxiliary channel input/output function;
8). Earphone output function;
9). Karaoke function and auto accompaniment function;
10). RSD support function;
11). Stand-by function, power consumption lower than 3W.
12) Decoder for Digital audio input (Optical, Coaxial)
13) Bass booster function to balance the Movie effect
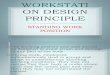
2. Diagram of DK1050S complete-machine components and table of integrated circuit
functions:

2. Table of DK1050S integrated circuit functions
Circuit Board
P/N Name Function
Loader Sanyo loader Disk signal picking
U201 MT1389
RF signal processing, digital signal processing, servo processing, MPEG
decoder, line-by-line scanning, system control
U202 AT24C02 Serial EEPROM, status memory
U205 HCU04 6 inverter
U209 LM1117MP-1.8 1.8V power supply
U211 AE45164016 64Mbit SDRAM
U214 29LV160BE 16Mbit FLASH ROM
Main board
U302 D5954 4-channel servo drive circuit
N102 PT6317 Panel control, VFD play drive Panel
N103 REMOT Remote radio head
16M ROM
SDRAM
Sanyo
Loader
Focus TRS
Feed Main axis
Load Load drive
Power circuit Panel circuit
State storage
Digital amplify
Trimming
Servo drive
Digital servo processing
Digital signal processing
AV
out circuit
Composite video
S-video
Y/Cb/Cr
6-channel audio out
Optical, coaxial
MT1389
BA5954
5508,5112
HCU04
AT24C02
29LV160BE
Progressive out
Y/Pb/Pr
VGA
Figure 1
Tuner, optical, coaxial

U501 NCP1200D Power switch circuit
U502 HS817 coupling amplifier
U503 HA17431 2.5V reference voltage comparer
U108 LM7805 5V three-terminal power supply
U504 0880 Power switch circuit
U506 HS817 coupling amplifier
Power switch
U507 LM431 2.5V reference voltage comparer
N12 5508 Digital signal processing
N13/14 5112 Power amplification
N8/9 TLV272 Computation of amplification
Amplifier board
N10/11 RC4580 Digital signal amplification
Chapter Two Working Principle of Servo Circuit
1. Digital signal processing
DK1050S uses Sanyo’s double-beam super error correction loader and MTK decoding scheme. Its servo circuit mainly consists of advanced signal processing, digital servo processing, digital signal processing IC MT1389 and drive circuit BA5954, of which MT1389 is also one of the main components of the decoder circuit. Signals A, B, C, D, E, F, SA, SB and RFO, transmitted from the loader, are input from pins 2-13 of MT1389 and, after being amplified via the internal pre-amplifier of MT1389, are divided into two parts in MT1389: One part of these signals, after being processed by MT1389’s internal digital servo signal circuit, form corresponding servo control signals and output control signals focus (FOSO), tracking (TRSO), main axle (DMSO) and feed (FMSO) from MT1389’s Pin P42, Pin P41, Pin P37 and Pin P38 respectively, which are then sent to the drive circuit BA5954 for drive amplification. After drive amplification, these output control signals drive the focus coil, tracking coil, Main axle motor and feed motor respectively. Focus and tracking servos are used for correcting object lens and enable laser beams to correctly read signals from CD; feed servo is used for driving laser head to make radial movement to scan the disk; main axle servo is used to control the Main axle motor to read signals at constant linear velocity to drive the disk. The other part of the signals, after amplification, equal frequency compensation, etc via the internal voltage-controlled amplifier (VCA) of MT1389, are converted by the internal A/D

converter into digital signals and, when the loader reads CD/VCD signals, these signals are EFM demodulated in MT1389 and, after CIRC error correction in MT1389, are output for post audio and video frequency decoding; when the loader reads DVD signals, these signals are ESM demodulated in MT1389 and, after RSPC error correction in MT1389, are sent for post decoding.
2. Control signal processing
1). Laser power auto control. The circuit is as shown in Diagram 2.
Diagram 2 MT1389 has an internally integrated APC (auto optical power control) circuit. Pin 20 is the pin for VCD laser power strength detection signal input, Pin 21 is pin for DVD laser power strength detection signal input and Pin 23 is pin for VCD/CD laser power drive control output. When it is detected by Pin 20 that laser output power is too strong, MT1389’s internal circuit will process it so voltage output by Pin 23 will increase and V302 (2SB1132) conductivity will decrease,then the
collector electrode voltage will drop, the voltage supplied to the laser tube will also drop, the light from the laser head will become weaker, thus automatically adjusting the laser power output. Pin 22 is the pin for DVD laser power drive control output and the control process is similar to that of VCD. 2). Inject/Eject control circuit. The circuit is as shown in Diagram 3.
Diagram 3 What is different form the previous MTK circuit is MT1389 has an internally integrated advanced signal processing circuit, and the inject/eject control signals are processed by MT1389. The inject

control signal are processed by Pin 51 of MT1389 and the eject control signal is processed by Pin 39 of MT1389. When we press the inject button, Pin 51 of MT1389 is high level and Pin 39 is low level. Now, the triode V308 conducts and the passes resistance R323, making the base of V306 low level. V306 also conducts. The direction of current is as shown in the following diagram:
Power supply voltage VCC ? V306 E-C junction? motor positive end LOAD+ ? motor negative end LOAD- ? V308 C-E junction ? ground
So the motor runs clockwise and completes the inject operation. When we press the eject key, Pin 51 of MT1389 is low level and Pin 39 is high level. Now the triode V307 conducts and passes resistance R324, making the base of V309 low level. V309 also conducts. The direction of current is as shown in the following diagram:
Power supply voltage VCC ? V309 E-C junction? motor negative end LOAD+ ? motor positive end LOAD- ? V307 C-E junction ? ground So the motor runs counterclockwise and completes the eject operation.
3). Main axle motor control braking circuit. The circuit is as shown in Diagram 4. In order to extend the service life of the motor and reduce the impact of starting current on the motor, when there is a disk, our R&D personnel design the main axle motor to be always at the status of running, so even if “STOP” key is pressed, the disk will not stop running. This way, when we press the “EJECT” key, a braking signal is needed to immediately stop the main axle motor and the “EJECT” operation can be completed within a short period of time. When it is playing, if we press the “EJECT” key, the main axle drive signal will disappear, but the main axle motor, due to the effect of moment, will still run. At this time, the electromotive force generated by the motor operation can obtain induction voltage on the sampling resistances R321 and R340 and, through resistances R319 and R320, adds them to Pin 36 and Pin 35 of
MT1389, and after internal processing and amplification in MT1389, is output from Pin 34, then
4

sent to Pin 47 of MT1389 via R318. After internal analog/digital conversion and corresponding processing, MT1389 outputs a transient motor anti-braking signal from its Pin 37, thus immediately stopping the main axle motor to ensure that the disk no longer evolves when it is being ejected.
3. Servo drive circuit
The servo drive of this machine uses one 4-channel BA5954 drive circuit. This circuit is specially designed for servo. The circuit is as shown in Diagram 5. MT1389 digital servo circuit generates four servo control signals: Focus control signal, tracking control signal, feed control signal and main axle control signal. These signals are respectively added to Pin 1, Pin 26, Pin 23 and Pin 5 of BA5954. After being amplified by BA5954 drive, the focus control signal and tracking control signal are output from Pin 13, Pin 14 and Pin 15, Pin 16 of BA5954 and then added to the focus and tracking coils to drive the laser head to complete the focus and tracking operations. Feed and main axle drive signals are output from Pin 17, Pin 18 and Pin 11, Pin 12 of BA5954 and then added to the feed motor and main axle motor to drive the laser head to make radial movement and make the disk evolve at constant linear velocity.
Pin 28 (STBY) of BA5954 outputs enable/disable signals. Only when this pin is high level can the output terminal outputs drive voltage.
Chapter Three Working Principle of Decoder Circuit
The decoder circuit of this machine mainly consists of the decoder chips MT1389, SDRAM AE45164016, FLASH ROM 29LV160BE, audio frequency DAC CS4360, etc.
1. System control circuit
1). Resetting circuit is as shown in Diagram 6:
Focus coil
Tracking coil
Feed motor
Main axle motor
Diagram 5

Diagram 6 The resetting circuit of this machine consists of the triode Q204 9014, resetting capacitor TC217 22uF/16V and inverter U205 HCU04. When we open the machine, because the end voltage of the capacitor cannot change suddenly, Q204 base is low level. The emitter of Q204 is low level and, after secondary inversion and trimming by U205, outputs low-level resetting signal to Pin 110 of MT1389 to provide resetting for MT1389. When charging ofTC217 is finished, Q204 base changes to high level and Q204 conducts. Its emitter is high level and, after secondary inversion and trimming by U205, it outputs high level and adds it to Pin 110 of MT1389 to enable it to maintain high level during normal operation.
2). Clock circuit X201 27MHz crystal oscillator, C275/27PF, C276/27PF and inverter HCU04 form the clock oscillation circuit. The clock signal generated passes R244 and R248 and is then added to Pin 229 and Pin 228 of MT1389 to provide MT1389 with working clock.
3). Data communication circuit The data communication circuit of this machine mainly consists of the decoder chip MT1389, SDRAM AE45164016 and FLASH ROM 29LV160BE. It is shown in Diagram 7. MT1389 is a super large-scale integrated circuit, whose working voltages are +3.3V and +1.8V. Its main functions are advanced RF small signal processing, digital servo processing, digital signal processing, MPEG decoding, video decoding, etc. At the same time, the built- in MCU of MT1389 is also the system control circuit of complete machine. AE45164016 is a 4M*16bit large-capacity SDRAM. Its working voltage is +3.3V. The 6ns module used in DV971 is very fast and its maximum working frequency can reach 166MHz. As the working buffer memory of decoder chip MT1389, its main function is to store the audio and video data flows in the time of decoding. 29LV160BE is FLASH ROM, whose capacity is 16Mbit and working voltage is +3.3V. It is mainly used to store user information, such as OSD characters, working micro-codes, starting LOGO, ETC.

2. Audio/video output circuit
1). Video output circuit DK1050S not only outputs three interleave video signals: CVBS composite video signal, S terminal Y-C signal and Y/Cb/Cr color difference signal, but also outputs two line-by-line video signals: Y/Pb/Pr line-by-line color difference signal and VGA line-by-line signal. Its decoder chip MT1389 has a built- in video encoder circuit that can directly outputs analog composite video signal CVBS, S terminal, color-difference signal and VGA signal. CVBS composite video signal is output from Pin 198 of MT1389; S terminal signal Y-C is output from Pin 194 and Pin 196 of MT1389; color difference signal and R-B-G signal in VGA interface are output from Pin 203, Pin 202 and Pin 200 of MT1389; synchronous signals HSYNC and VSYNC of line and field in VGA interface are output respectively from Pin 207 and Pin 205 of MT1389. It must be noted that interleave color difference, line-by-line color difference signal and line-by-line R-B-G signal are output from the same pin. So the corresponding signal output shall be selected through setting according to the port connected to TV; otherwise, there might be sound without picture. 2). Audio output circuit After being processed by MT1389, the audio frequency signal outputs data signals of five audio tracks from its Pin 217, Pin 218 and Pin 219, and outputs clock signals of five channels from its Pin 214 and Pin 215. These signals, after passing IC 74HCT125, are sent to the audio frequency signal processing IC TAS5508 for audio frequency signal processing (see Exhibit for detailed IC data). After that, ten groups of PWM signals are output, six of which are sent to power amplification, two are sent to earphone output and two sent to auxiliary channels. Of the six groups of signals sent to the power amplification IC, the surround sound and super bass share one N13 IC TAS5508 and the main audio track and the middle share N14 IC TAS5508. Signals are amplified in this IC. Because it is digital high-frequency signal amplification, the efficiency is very high and the heating value of power IC is very small. After amplification, the
CLK
DQML DQMH
CKE
113
RAS CAS CS WE
BA0 BA1
15 39 38 37 18 17 19 16 20 21
137 156 157 140 139 142 138 145 143
DMA0—DMA11
DQ0—DQ15
77
A0—A21
AD0—AD7
DCE
DRD
DWR
RY/BY
BYTE
AE45164016 MT1389
29LV160BE 26
28
11
15
47
79
66
VD
GND
Diagram 7

output is still digital signal, so in order for output in the speaker, the amplified digital signal shall be processed before output. For a PWM signal that contains audio frequency signals, because the high-frequency signal’s frequency is very high and exceeds the hearing of human ear, so we can neglect the influence of high-frequency signals in the process of processing and only restore low-frequency audio frequency signals.
TAS5508 is an advanced 8-channel digital high-performance IC modulated by pulse width. It applies to processing of most audio frequency digital signals and presents good noise coefficients and dynamic range within 20— 20KHZ. Its characteristics are as follows:
(1) Auto control over clock speed and data sampling speed; (2) 8 groups of channels for audio frequency input; (3) 8 groups of PWM output that can be configured into 6-channel stereo sound output line or
8-channel line output; (4) Line output is one group of PWM signals drives one different input open-loop amplifier.
IC TAS5112 is a high-performance audio frequency digital power amplifier. When bridged with a 6-ohm load, each channel can output up to 50W and has a 95DB dynamic range. The distortion is low and power efficiency can reach 90%. The heating value is low. It provides low-voltage protection, hi-temperature protection, over-current protection, etc, and has a built- in drive power adjustment door circuit. It is suitable for home theaters, DVD receivers, mini composite acoustics, etc. Please see the appendix for detailed introduction to IC. When the disk is normally read, the digital signals and clock signals processed from 1389, after selection by IC 74HCT125, are sent to Pins 26-31 of IC TAS5508 for processing. Now, plug in the earphone, the PH-SEL is high level and MUTE, when normally working, is also high level. Pin 37 of TAS5508 is also high level. The oscilloscope can detect all data lines and clock lines. Of the signals from 5508, one group is sent to N8 and N9 and, after processing, is output from the auxiliary channel; one group is sent to the earphone for processing; PWM signals are sent to the amplifier for amplification. When the earphone is plugged in, the PH-SEL signal is peremptorily short circuited to the earth and changes to low level. The amplifier is mute, but the auxiliary channel output is normal. When reading the disk, the system by default selects Karaoke for input. So, when playing the disk, Karaoke can be opened and this machine also has the auto accompaniment function that is realized by software. When playing VCD, if the system detects external input, it automatically shields the human voice signal in the disk and only keeps the accompanying sound. DK1050S has the radio function and can receive RDS signals. Radio head control lines CE, DI, CL and DO, through 28P drop-out lines, are respectively connected to MT1389. When any control line is abnormal, radio function will become abnormal. The RDS signal received by the radio head is sent to special-purpose IC SAA6588 for processing. 3. Auxiliary channel, optical fiber and co-axial input This machine has auxiliary channels, radio function, optical fiber and co-axial external input. This machine has radio function, and auxiliary channel input function and Karaoke function. All external input shall be selected by N3 CD4052 and then undergo the analog/digital conversion via N7 CS5340 and be sent to MT1389 for signal processing. Subsequent processing and output share the same process as normal disk reading signal output. Optical fiber and co-axial signals, after inductance filtering and capacitance filtering, are sent to the

serial audio frequency digital signal to receive the input Pins 4, 12 and 14 of signal IC CS8415. After passing this IC, the serial audio frequency digital signal is converted into PCM signal, which is then output from Pin 16 (sampling rate signal), Pin 17 (clock signal of main track) and Pin 18 (audio frequency digital signal) of IC and sent to IC 1389 for signal processing.
Chapter Four Working Principle of power board
This machine has two groups of power supply. One group supplies power for the decoder board and small-power IC; the other group supplies power for the power amplification IC and the voltage is high. But both groups have the same design principle. Introduction to the principle of circuit The 220V AC current passes the power plug, protector tube, varistor R501 and common mode rejections BC501 and L501 and is added to the integrated bridge rectification circuit. The diode is IN4007 that has a good performance/price ratio and has a higher durable pressure than IN4001. After bridge rectification, 311V is output and flows through TC501 filter, then is respectively added to two transformers and sent to the DRAIN control pin of switch modules U501 and U502. The power supply working voltage of IC is directly rectified, filtered, divided by the resistor and then supplied to IC. Diode D508, capacitor C516 and resister R516 form the absorb circuit to provide windings 1-4 of the transformer with the discharge circuit for reverse electromotive force. Pin FB controlling the IC is the feedback control pin. According to its current, the pulse width’s conduction and starting and ending time are determined to ensure the stability of voltage output. Five branch circuits are coupled to secondary via the transformer.
1. Voltage output from Pins 11 and 13 of transformer T502, after being rectified and filtered, outputs a group of +28V voltage for power amplification IC;
2. Voltage output from Pin 16 of transformer T501, after being rectified and filtered, outputs a group of +12V voltage that, after being rectified by IC LM7805, outputs a group of +5V voltage; 3. Voltage output from Pin 14 of transformer T501, after being rectified and filtered, outputs a +5V voltage to supply one end of coupling amplifier U502;
4. Voltage output from Pin 12 of transformer T501, after being rectified and filtered, outputs a +3.3V voltage and to supply a group of stable voltages for CPU;
5. Voltage output from Pin 9 of transformer T501, after being rectified and filtered, outputs a group of 21V voltage for displayer driver IC. Clamp ZD501 on -21V supplies panel display screen with filament voltage. Voltage to ground of FL+ and FL- is about -16V.
Because the two groups of power switches of the machine have different working principles, here we only analyze the group that supplies CPU with +5V voltage. Feedback sampling of this group of power supply comes from 5V. It supplies the coupling amplifier HS817 via D514 and R517. At the same time, it is divided by R519 and R520 to supply the reference voltage pin R of 2.5V comparator. When 5V is high, the Pin KA of comparator LM17431A conducts, passes photoelectrical coupler HS817 and is sent to the fourth pin of switch IC 5L0380R to reduce the conduction time of internal switch tube, reduce the coupling of transformer, lower the 5V output and achieve the goal of automatic regulation and vice versa. It must be noted that, in this power switch, the two groups of power switches use a base voltage that is different from IC. The group supplying the amplifier outputs a higher voltage, so it uses

LM431 that has better performance and a higher endurable pressure. However, the group supplying 3.3V voltage, because the output voltage is low, uses 17431. Because these two kinds of IC are different, care shall be taken in the process of maintenance to avoid confusion. This machine uses DC switches.
When the power of the machine is just on, voltage output from Pin No.16 of transformer, after being rectified by D507 half wave, generates a 76V high-frequency voltage on silicon-controlled pin 1. This voltage passes capacitors C507 and R513 and is coupled to Pin No.3 of Q501, the same high-frequency voltage. Because of the effect of feedback stable voltage, Pin No.2 of Q501 gets a stable 5V DC voltage. Its wave shape is as follows: It can be seen from the above diagram that when T=t01, Pin P1 of Q501is high level and Pin P3 of Q501 is also high level and Q501 deducts and Pin P3 outputs a 5V DC voltage; when T=t12, Pin P1 of Q501 and Pin P3 of Q501 are low level and, because U2 > U1, Q501 stops and Pin P3 does not output voltage and 5 VDC voltage is supplied by capacitor TC505; At the moment the power is on, the voltage of U1 is 76V. But, because the conduction of silicon-controlled, Pin P2 of Q501shall be maintained at 5V causing the voltage of U1 to drop to around 7V, so other secondary windings do not output. Power switch only outputs CPU5V and the power supply is at the low-load working status. When the machine is open, only 5V is supplied to the panel via transformer coupling and the complete machine is stand-by. When pressing the stand-by on the panel or on the remote controller, Pin 40 of panel IC TP6317 outputs a high level and triode V503 conducts, giving Pole G of Q501a low level and silicon-controlled Q501 stops. Triode V504 conducts and triode V502 stops. Other windings begin to work normally.
U1
t
U3
U2
t
t
0 1 2

Chapter Five Panel Control and VFD Display Circuit The panel mainly consists of the VFD display screen, drive IC TP6317, remote receiving head HSOO38A2, keys control and indicator display circuit. It mainly accomplishes the man-machine dialogue and displays the working status. Diagram of components is as follows:
Under the control of built-in CPU of MT1389 and via VFDST (status), VFDCK (clock) and VFDAT (data), U401 IC TP6317 is controlled to display complete-machine working status and receive the user control command given by TP6317 to control the complete-machine control circuit and enable complete machine to work under designated status. When pressing the user operating panel key, the control command via the key scans the circuit and sends control command to IC TP6317. After internal encoder drive of IC TP6317, control data is output from Pin 5 and Pin 6 (VFDAT) to internal CPU of MT1389 and the CPU controls the controlled circuit and controls VFD via IC TP6317. VFD401 is a vacuum fluorescent display screen. Its most obvious feature is height. Its working princip le is similar to TV display tube. Pins 1, 2, 34 and 35 supply the filament; Pins 27-32 supply the GRID poles. In each GRID there are 16 different characters for display. Pins 4-19 are SEG poles. CPU, through controlling IC TP6317, finally controls SEG poles, thus enabling the characters of working status to display on the display screen.
Remote receiving head circuit mainly consists of remote receiving head HS0038A2. Pin No.1 is for grounding, Pin No.2 is the supply end and Pin No.3 is the output pin for received signals and is directly connected to the CPU inside MT1389 to control corresponding circuit. This machine has the earphone output function. One of the pins inside the earphone is directly connected to TAS5508. When the earphone is plugged in, detection line H-DET is grounded and becomes low level. When Pin 12 of TAS5508 becomes low level, the amplifier partially outputs mute; when it works normally, the detection pin is high level (about 3.3V).
U401
IC TP6317
VFD
display
Key control
U201
MT1389
Remote receiving
Panel indicator control
VFDST VFDCK VFDAT

Typical Trouble Shooting Process
1. Key-point voltages of DK1050S
Decoder circuit Resetting 1. U205 (HCU04), Pin 8, about 5V 2. MT1389, Pin 110, about 5V 3. FLASH ROM, Pin 12, about 5V Clock: 27MHZ crystal oscillator, both ends, about 0.77V I2C bus SDA, 3.3V I2C bus SCL, 3.3V
Servo circuit: LD01: 3.3V; LD02: 3.3V V301 and V302 collector electrode LD, voltage: 2.3V BA5954 Pin 4 base voltage: 1.4V BA5954 Pins 15 &16, tracking drive output, about 2.5V. BA5954 Pins 17 & 18, feed drive output, about 2.5V BA5954 Pins 13 & 14, focus drive signal output, about 2.5V BA5954 Pins 11 & 12, main axle drive output, about 2.5V BA5954 Pin 1, focus control signal input 1.4V BA5954 Pin 5, main axle control signal input 1.4V
BA5954 Pin 26, tracking control signal input 1.4V BA5954 Pin 23, feed control signal input 1.4V Amplifier circuit: TAS5508 Pin 9, power supply pin, 3.3V TAS5112 32, 33, 40, 41, 44, 45, 52 and 53 power supply 28V.

2. Main trouble shooting process


Appendix: Introduction to IC Data
1. MT1389
MT1389 uses LQFP 256-pin encapsulation and 3.3V/1.8V dual voltage working mode. It is a good-performance and large-scale CD-ROM and DVD-ROM front-end CMOS integrated circuit and a special-purpose single chip for CD/VCD/DVD player. It has focus servo error amplification and tracking servo amplification functions and RF horizontal output servo control. Its main functions are: Pre-processing of RF small signals. Its main function is to process and amplify RF signals transmitted by laser head and to automatically regulate the laser power output. At the same time, it identifies VCD disks and DVD disks. Digital-servo processing. It can generate focus, tracking, feed and main axle servo control signals. Digital-signal processing completes EFM/EFM+ DEMODULATION of RF signal. MPEG-1/MPEG–2/MPEG4/JPEG Video decoding. This chip decodes not only VCD and DVD but also MPEG 4 network video. It can also decode “Movie Network” disks and at the same time can read JPEG pictures to play digital albums. In terms of audio frequency, it not only dual decodes AC-3/DTS, but also reads MP3. It can also decode DVD-Audio to achieve a high-resolution tonal quality that is 1000 times higher than CD. Using the built-in 8032 micro processor of the chip, MT1369E can also achieve the system control function of the complete machine, thus greatly simplifying the circuit design.
MT1389 pins have the following functions:
Pin Name Function
1 AGND Analog earth
2 DVDA DVD-RF hi-frequency AC coupling signal A
3 DVDB DVD-RF hi-frequency AC coupling signal B
4 DVDC DVD-RF hi-frequency AC coupling signal C
5 DVDD DVD-RF hi-frequency AC coupling signal D
6 DVDRFIP DVD-RF hi-frequency AC coupling signal
RFIP input
7 DVDRFIN DVD-RF hi-frequency AC coupling signal
RFIN input
8 MA DVD-RAM main beam RF DC signal input A
9 MB DVD-RAM main beam RF DC signal input B
10 MC DVD-RAM main beam RF DC signal input C
11 MD DVD-RAM main beam RF DC signal input D
12 SA DVD-RAM auxiliary beam RF DC signal
input A
13 SB DVD-RAM auxiliary beam RF DC signal

input B
14 SC DVD-RAM auxiliary beam RF DC signal
input C
15 SD DVD-RAM auxiliary beam RF DC signal
input D
16 CDFON CD focus error inverted input
17 CDFOP CD focus error positive input
18 TNI 3-beam auxiliary PD signal inverted input
19 TPI 4-beam auxiliary PD signal positive input
20 MDI1 Laser power monitoring input 1
21 MDI2 Laser power monitoring input 2
22 LDO2 Laser power output 2
23 LDO1 Laser power output 1
24 SVDD3 Servo 3.3V power supply
25 CSO/RFOP Main servo signal output/RF positive output
26 RFLVL/RFON RF level output/RF inverted output
27 SGND Servo earth
28 V2REFO Reference voltage 2.8V
29 V20 Reference voltage 2.0V
30 VREFO Reference voltage 1.4V
31 FEO Focus error signal output
32 TEO Tracking error signal output
33 TEZISLV Tracking over-zero error input
34 OP_OUT Sensor signal amplification output
35 OP_INN Sensor signal inverted input
36 OP_INP Sensor signal in-phase input
37 DMO Main axle control signal output
38 FMO Feed control signal output
39 TROPEN PWM OPEN signal output
40 PWMOUT1/ADIN9 No.1 pulse width modulation signal
output/AD general input
41 TRO Tracking control signal output
42 FOO Focus control signal output
43 USB_VSS USB earth
44 USBP USB data
45 USBM USB data
46 USB_VDD3 USB 3.3V power
47 FG/ADIN8 Motor Honeywell Sensor signal input/AD

general input
48 TDI/ADIN4 OPEN detection signal input/AD general
input
49 TMS/ADIN5 CLOSE detection signal input/AD general
input
50 TCK/ADIN6 BA5954 enable signal output/Ad general
input
51 TDO/ADIN7 CLOSE signal output/AD general input
52、97、122、152、173、221
DVDD18 Digital 1.8V power supply
53-58 IOA2-7 Micro controller address bit 2-7
59 HIGHA0 Micro controller address bit 0
60、61 IOA18-19 Micro controller address bit 18-19
62、85、94、116、119、134、144、148、161、163、175、216、223
DVSS Digital earth
63 APLLCAP Analog phase lock loop external capacitor
64 APLLVSS Analog phase lock loop earth
65 APLLVDD3 Analog phase lock loop3.3V power supply
66 IOWR FLASH read-and-write control signal
67-72 HIGHA3-7 Micro controller address bit 3-7
73、80、108、127、141、155、167、182、204、212
DVDD3 Digital3.3V power
74、75 HIGHA1-2 Micro controller address bit 1-2
76 IOA20 Micro controller address bit 20
77 IOCS FLASH chip selection
78 IOA1 Micro controller address bit1
79 IOOE FLASH output enable
81-84 AD0-3 Micro controller address /data bit0-3
86-88 AD4-6 Micro controller address /data bit4-6
89 IOA21/ADIN0 Micro controller address bit 21/AD general
input
90 ALE Micro controller address enable
91 AD7 Micro controller address /data bit 7
92 A17 FLASH address bit 17
93 IOA0 Micro controller address bit 0

95 UWR Micro controller write operation
96 URD Micro controller read operation
98 UP1_2-1_7 Micro controller port
104 UP3_0 Micro controller port
105 UP3_1 Micro controller port
106 UP3_4 Micro controller port
107 UP3_5 Micro controller port
109 ICE Micro controller correction mode enable
110 PRST Resetting input
111 IR Remote control signal input
112 INT0 Micro controller break 0
113 DQM0 DRAM input/output shield signal
114 DQS0 DRAM input/output shield signal
115 RD7 DRAM data
117-118 RD5-6 DRAM data
120-121 RD3-4 DRAM data
123-125 RD0-2 DRAM data
126 RD15 DRAM data
128-133 RD9-14 DRAM data
135 RD8 DRAM data
136 DQS1 DRAM input/output shield signal
137 DQM1 DRAM input/output shield signal
138 RWE DRAM write enable
139 CAS DRAM column address selection
140 RAS DRAM row address selection
142 RCS DRAM chip selection
143 BA0 DRAM section address 0
145 BA1 DRAM section address 1
146 RA10 DRAM address
147 RA0 DRAM address
149 RA1-3 DRAM address
153 RVREF/ADIN3 Reference voltage/AD general input
154 RCLKB DRAM clock
156 RCLK DRAM clock
157 CKE DRAM clock enable
158 RA11 DRAM address
159-160 RA8-9 DRAM address

162 RA7 DRAM address
164 RA4-6 DRAM address
168 RD13/ASDATA5 DRAM data/audio frequency serial data
169 RD27-30 DRAM data
174 RD26 DRAM data
176-177 RD24-25 DRAM data
178-179 DQM2-3 DRAM input/output shield signal
180-181 RD22-23 DRAM data
183-188 RD16-21 DRAM data
189 DACVDDC Digital/analog conversion 3.3V power
190 VREF Reference voltage
191 FS
192 YUV0/CIN
193 DACVSSC Digital/analog conversion earth
194 YUV1/Y Video signal YUV1 output /Y signal output
195 DACVDDB Digital/analog conversion 3.3V power
196 YUV2/C Video signal YUV2 output /C signal output
197 DACVSSB Digital/analog conversion earth
198 YUV3/CVBS Video signal YUV3 output /CVBS signal
output
199 DACVDDA Digital/analog conversion 3.3V power
200 YUV4/G Video signal YUV4 output /G signal output
201 DACVSSA Digital/analog conversion earth
202 TUV5/B Video signal YUV5 output /B signal output
203 YUV6/R Video signalYUV6 output /R signal output
205 VSYNC/ADIN1 Field synchronization signal output /AD
general input
206 YUV7/ASDATA5 Video signal YUV7 output / audio frequency
serial data
207 HSYNC/ADIN2 Row synchronization signal output/AD
general input
208 SPMCLK
209 SPDATA
210 SPLRCK
211 SPBCK/ASDATA5
213 ALRCK Audio frequency right/left track clock
214 ABCK Audio frequency bit clock
215 ACLK Audio frequency DAC external clock

217-220 ASDATA0-3 Audio frequency serial data
222 ASDATA4 Audio frequency serial data
224 MC_DATA Microphone digital audio frequency input
225 SPDIF Digital audio frequency signal output
226 RFGND18 RF signal earth
227 RFVDD18 RFsignal1.8V power
228 XTALO Clock output
229 XTALI Clock input
230 JITFO RF small signal output
231 JITFN RF small signal inverted amplification input
232 PLLVSS Phase lock loop earth
233 IDACEXLP
234 PLLVDD3 Phase lock loop3.3V power
235 LPFON Amplifier circuit filter output
236 LPFIP Amplifier circuit filter input
237 LPFIN Amplifier circuit filter input
238 LPFOP Amplifier circuit filter output
239 ADCVDD3 Analog/digital conversion 3.3V power
240 S_VCM
241 ADCVSS Analog/digital conversion earth
242 S_VREFP
243 S_VREFN
244 RFVDD3 RF 3.3V power
245 RFRPDC DC RF error signal input
246 RFRPAC AC RF error signal input
247 HRFZC Hi-frequency RF signal over-zero detection
248 CRTPLP
249 RFGND RF earth
250 CEQP
251 CEQN
252 OSP
253 OSN
254 RFGC
255 IREF Reference current
256 AVDD3 Analog 3.3V power

2. BA5954
BA5954 is a servo-driven single-chip integrated circuit with a built-in 4-channel BTL-driven circuit. It can directly receive the PWM control signal output by digital servo IC. After internal filtering and drive amplification, it drives the executing components in the servo mechanism to complete the focus, tracking, feed and main axle drives. BA5954 uses 28-pin encapsulation. Notes: The 28 pins of BA5954 output a valid control signal, which is supplied by the 50 pins of MT1389. When this signal is high level, BA5954 output is valid; while when this signal is low level, BA5954 is not started and its output ends are closed.
BA5954 pins have the following functions:
Pin Name Function 1 VINFC Focus control signal input
2 CF1 External feedback circuit
3 CF2 External feedback circuit
4 VINSL+ Positive control input, reference voltage
5 VINSL- Main axle control signal input
6 VOSL External feedback resistor
7 VINFFC Focus feedback signal input
8 VCC 5V power
9 PVCC1 5V power
10 PGND Earth
11 VOSL- Main axle drive reverse voltage output
12 VO2+ Main axle drive positive voltage output
13 VOFC- Focus drive reverse voltage output
14 VOSC+ Focus drive positive voltage output
15 VOTK+ Tracking drive positive voltage output
16 VOTK- Tracking drive reverse voltage output
17 VOLD+ Feed drive Positive voltage output
18 VOLD- Feed drive reverse voltage output
19 PGND Earth
20 VINFTK Tracking feedback signal input
21 PVCC2 5V power
22 PREGND Earth
23 VINLD Feed control signal input
24 CTK2 External feedback circuit
25 CTK1 External feedback circuit
26 VINTK Tracking control signal input
27 BIAS 1.4VReference voltage input
28 STBY Enable control signal

3. 29LV160BE
29LV160BE is a 16M bit FLASH memory. It uses the 0.23-um manufacturing process. It has16-bit data width DQ0-DQ15 and its capacity is 16M bits. Its working voltage is 3.3V. It uses the 48-pin TSOP encapsulation. Its working mode is shown in the following table:
DQ8~DQ15 Working Status CE OE WE RESET A0~A19 DQ0~QD7
BYTE: Hi Level BYTE: Low Level
Read L L H H Ain Dout Dout Hi resistance
Write L H L H Ain Din Din Hi resistance
Stand-by H × × H × Hi resistance Hi resistance Hi resistance
Output Disabled L H H H × Hi resistance Hi resistance Hi resistance
Resetting × × × L × Hi resistance Hi resistance Hi resistance
Functions of 29LV160BE pins are shown in the following table:
Pin Name Function
15 RY/BY Ready/System busy
1~9、16~25 、48 A0~A19 20-bit address bus
26 CE Chip enable
27、46 VSS Earth
28 OE Output enable
29~36、38~44 DQ0~DQ14 15-bit data bus
37 VCC 5V power
45 DQ15/A-1 Character expansion mode is data line; bit expansion mode is
address line
47 BYTE Select 8-bit or 16-bit output mode. 16-bit output for high
level and 8-bit output for low level.
11 WE Write enable
12 RESET Resetting, low level valid
10、13、14 NC Void pin
4. AE45164016
AE45164016 is a 4Banks×1M×16bit 64Mb CMOS synchronous DRAM. Its features ar e big capacity, high speed, etc. Its working voltage is 3.0V~3.6V. This memorizer uses 54-pin TSOP encapsulation.

Pins of AE45164016 have the following functions:
Pin Name Function
1、14、27 VDD +3.3Vpower
2、4、5、7、8、10、11、 13、42、44、45、47、48、
50、51、53 DQ[0~15] 16-bit data bus
3、9、43、49 VDDQ +3.3V power
6、12、46、52 VSSQ Earth
28、41、54 VSS Earth
15 LDQM Data input/output shield signal
16 WE Write control signal
17 CAS Column address gating signal
18 RAS Row address gating signal
19 CS Chip selection signal
20 SD-BS0 Segment address 0 gating signal
21 SD-BS1 Segment address 1 gating signal
22~26、29~35 MA [0~11] 12-bit address bus
36、40 NC Void pin
37 CKE Clock enable signal
38 CLK System clock input
39 UDQM Data input/output shield signal
5. Functions of TAS5508 pins TAS5508 is a high-performance audio frequency signal processing IC launched by TI Co. It has an 8-track pulse width modulation function and has a complete protection function. It features low distortion and good dynamic characteristics. 1 VRA_PLL Supply PLL with a 1.8V reference
voltage
2 PLL_FLT_RET External filter circuit of PLL 3 PLL_FLTM Inverted input end of PLL
4 PLL_FLTP In-phase input end of PLL 5 AVSS Analog earth 6 AVSS Analog earth
7 VRD_PLL Supply PLL with a 1.8V reference voltage
8 AVSS_PLL Analog earth of PLL
9 AVDD_PLL PLL supplies a 3.3V voltage 10 VBGAP Supply a 1.2V reference voltage
11 RESET System resetting signal, low level valid 12 HP_SEL Microphone input/output selection
13 PDN Close voltage, low level valid

14 MUTE Software control mute, low level valid 15 DVDD 3.3V digital supply pin
16 DVSS Digital grounding pin 17 VR_DPLL Supply PLL with a 1.8V reference
voltage
18 OSC_CAP Oscillating capacitor 19 XTL_OUT Crystal oscillator output pin
20 XTL_IN Crystal oscillator input pin 21 RESERVED Connected to digital earth
22 TBASE_SEL Connected to digital earth 23 RESERVED Connected to digital earth 24 SDA Data signal
25 SCL Clock signal 26 LRCLK Right/left track clock signal
27 SCLK Audio frequency clock signal 28 SDIN4 Audio frequency data input end
29 SDIN3 Audio frequency data input end 30 SDIN2 Audio frequency data input end
31 SDIN1 Audio frequency data input end 32 PSVC Control PWM signal output
33 VR_DIG Digital center reference voltage 1.8V 34 DVSS Digital earth
35 DVSS Digital earth 36 DVDD 3.3V digital supply voltage
37 BKND_ERR Logic-error control pin, low level valid 38 DVSS Digital earth 39 VALID Output PWM signal normal display, high
level valid
40 PWM_M_1 Pulse width modulation signal output 1 41 PWM_P_1 Pulse width modulation signal output 1
42 PWM_M_2 Pulse width modulation signal output 2 43 PWM_P_2 Pulse width modulation signal output 2
44 PWM_M_3 Pulse width modulation signal output 3 45 PWM_P_3 Pulse width modulation signal output 3
46 PWM_M_4 Pulse width modulation signal output 4 47 PWM_P_4 Pulse width modulation signal output 4 48 VR_PWM PWM core reference voltage 1.8V
49 PWM_M_7 Pulse width modulation signal output 7 50 PWM_P_7 Pulse width modulation signal output 7
51 PWM_M_8 Pulse width modulation signal output 8 52 PWM_P_8 Pulse width modulation signal output 8
53 DVSS_PWM Supply PWM signal with digital earth 54 DVDD_PWM Supply PWM signal with 3.3V voltage

55 PWM_M_5 Pulse width modulation signal output 5 56 PWM_P_5 Pulse width modulation signal output 5
57 PWM_M_6 Pulse width modulation signal output 6 58 PWM_P_6 Pulse width modulation signal output 6
59 PWM_HPML Earphone output PWM left track 60 PWM_HPPL Earphone output PWM left track
61 PWM_HPMR Earphone output PWM right track 62 PWM_HPPR Earphone output PWM right track
63 MCLK 3.3V clock input 64 RESERVED Connected to digital earth 6. IC TAS5112 IC TAS5112 is a TI-produced high-performance audio frequency digital power amplifier IC. When bridge-connected to a 6-ohm load, each channel can output up to 50W. It has a 95DB dynamic range and low distortion. It has power efficiency up to 90%, low heat radiation, low-voltage protection, high-temperature protection, over-current protection, etc. In addition, it has a built-in drive power door adjustment circuit。Basic functions of its pins are as follows:
Pin Name Function Description
31 BST_A Auxiliary power 42 BST_B Auxiliary power
43 BST_C Auxiliary power 54 BST_D Auxiliary power 23 DGND Digital input/output reference earth
16 DREG Digital supply voltage adjustment pin
12 DREG_RTN Digital supply voltage adjustment circuit
25 DVDD Input/output reference pin 1,2,22,24,28,29,27,36,37,48,49,56
GND Grounding pin
3,26 GREG Door circuit drive voltage adjustment pin
30,55 GVDD Digital voltage adjustment pin
15 M1 (TST0) Mode selection pin 14 M2 Mode selection pin
13 M2 Mode selection pin 4 OTW Hi-temperature protection pin 34,35 OUT_A Output pin A 38,39 OUT_B Output pin B 46,47 OUT_C Output pin C 50,51 OUT_D Output pin D 32,33 PVDD_A Supply voltage of half-bridge A
40,41 PVDD_B Supply voltage of half-bridge B

44,45 PVDD_C Supply voltage of half-bridge C 52,53 PVDD_D Supply voltage of half-bridge D
20 PWM_AM Inverted input end 21 PWM_AP In-phase input end
18 PWM_BM Inverted input end 17 PWM_BP In-phase input end
10 PWM_CM Inverted input end 11 PWM_CP In-phase input end
8 PWM_DM Inverted input end 7 PWM_DP In-phase input end
19 RESET_AB Resetting signal, low level valid 9 RESET_CD Resetting signal, low level valid
6 SD_AB Signal closed control 5 SD_CD Signal closed control 7. IC RC4558 IC RC4558 is a dual-channel low-noise amplifier IC. Compared with most amplifier ICs, it has a smaller noise, better output performance and wider power band. Its main features are small signal band, DC voltage gain up to 50000, AC voltage gain up to 2200 at 10KHZ, power band up to 140KHZ, wide supply range and very high conversion rate. Basic functions of its pins are as follows:
Pin Name Function Description
1 OUTPUT-A Output channel A 2 INVERTING INPUT-A Inverted input A
3 NON-INVERTING INPUT-A In-phase input A 4 V- Negative power supply
5 NON-INVERTING INPUT-B In-phase input B 6 INVERTING INPUT-B Inverted input B
7 OUTPUT-B Output B 8 V+ Positive power supply 8. CS 5340 CS 5340 is an A/D conversion IC. It can complete sampling, analog/digital conversion and has the filtering function. Under continuous input, its sampling frequency can reach 200KHZ/track. Its main features are as follows: 24-byte conversion; supporting all audio frequency sampling frequencies up to 192KHZ; under 5V supply, the dynamic range up to 101DB; high-conductivity filter for filtering DC, etc. Basic

functions of its pins are as follows:
Pin Name Function Description 1 M0 Mode selection
16 M1 Mode selection 2 MCLK Main clock signal
3 VL Logic voltage supply 4 SDOUT Audio frequency data output 5,14 GND Grounding pin 6 VD Digital power
7 SCLK Continuous clock signal 8 LRCK Right/left clock signal 9 RST Resetting signal
10 AINL Analog input 12 AINR Analog input
11 VQ Static voltage 13 VA Analog power
15 FILT+ Reference voltage

1 2 3 4 5 6
A
B
C
D
E
F
654321
F
E
D
C
B
A
Inp
ut
sele
ctio
n
AUX(L/R)
Karaoke
TUNER(L/R)
Buff
erMIC
A/D
co
nve
rsio
n
L/R
RDS decoder Digital audio DSP
MCLK, LRCLK, DATA
DRIVE
OUT
BUFFER
Headphone signal
FR/FL/C
POWER AMP
POWER AMP
SURR/SW
PWM_FRPWM_FLPWM_C
PWM_SRPWM_SLPWM_SW
ENABLE
LPF*3
LPF*3
OUT
OUT
DECODER/SERVO
LPFOUT
Lt/Rt
VFD Driver
Key scan
VOL Knob
J1/J2
MUTE
DIGITAL IN Format cc
Video output AV/TV
SwitchSCART
SHUT
LOADER
DVD/POWER AMPLIFIER POWER
STANDBY REMOTE
STANDBY
DCK/DAT/CLK
KEY1
REMOTE
J1/J2
Y1~Y6
VSYNC
SDASCL
A,B
MCLKSCLK
LRCLK
SBCLK
PWM
_R/L-
PWM
_R/L+
SD
POWER BOARD
FRONT PANEL
AMP BOARD
IN-OUT PART
PROCESS
Tune
r pa
rt

1 2 3 4 5 6
A
B
C
D
E
F
654321
F
E
D
C
B
A
DK
1050S PAN
EL
CIR
CU
IT
SW1 1IR-IN2SDA 3SCL4Dout 5
Din 6Vss 7CLK 8STB 9
Key1 10Key2 11Key
312
Key
413
Vdd
14Se
g1/K
S115
Seg2
/KS2
16Se
g3/K
S317
Seg4
/KS4
18Se
g5/K
S519
Seg6
/KS6
20Se
g721
Seg8
22
Seg923
Seg1024
Seg1125
Seg12/Grid1126
Vee27
Seg13/Grid1028
Seg14/Grid929
Seg15/Grid830
Seg16/Grid731
Grid632
Grid533
Gri
d434
Gri
d335
Gri
d236
Gri
d137
Vdd
38
PWC
TL
39
LE
D3
40
LE
D2
41
LE
D1
42
Vss
43
OSC
44
N101TP6317
F11
F12
NP
3
P14
P25
P36
P47
P58
P69
P710
P811
P912
P10
13
P11
14
P12
15
P13
16
P14
17
P15
18
P16
19
NX
20
NX
21
NX
22
NX
23
NX
24
8G25
7G26
6G27
5G28
4G29
3G30
2G31
1G32
NP
33
F234
F235
DS101 HNV-08SS56
G1
G2
G3
G4
G5G6G7G8
G1
G2
G3
G4
G5
G6
G7
G8
123456
XP505
CON6
FL-FL+
Vee
DGND
STBY
C10447u/16V
R101100K
VD1011N4148
+5VVee
+5V
+5V
Vee
+5V123
RP101 RVP
R119 4.7K
R117 4.7K
C110102
C111102C106 47u/16V
R113 100R
R109 100R
R111 100R
R112 100R
C10547u/16V
R118 4.7K
R116 4.7K
R115 4.7K
C101104
OUT 1VS3
GND2
N102 REMOT
C103 104
1234567
XP601
CON7
R12547R
IR
STBSDA
CLK
J3J4
C107221
C108221
C109221
C102104
S111
S104
S110
S107 S108
S105 S106
VD1031N4148
VD1041N4148
VD1021N4148
S109
R104 10K
R103 10K
R102 10K
R107 10KR108 10K
R124150R
VD107 Blue LED
+5V
R121330R
V1012N5401
V1022N5401
R10610K
R105 10K
R123120R
R120330R
R122120R
VD105 LED-BK VD106 LED-BK
+5V
+5V+5V
+5V+5V
+5V
+5V
+5V
+5V
R110 100R
R11433K
+5V
C11210u/35V
R126 150RVD108
Blue LED
+5V
R127 10K +5V
HDET
S102 S103 S101 R100 10K

1 2 3 4 5 6 7 8
A
B
C
D
87654321
D
C
B
A
1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
E
F
A
B
C
D
E
F
DVDA2
CE
QP
250
DVDB3
DVDC4
DVDD5
AGND1
OSP
252
OSN
253
DVDRFIP6
DVDRFIN7
MA8
MB9
MC10
MD11
SA12
SB13
SC14
SD15
CDFON16
CDFOP17
TNI18
TPI19
MDI120
MDI221
LDO222
LDO123
AV
DD
325
6
V2REFO28 SGND27
VREFO30 V2029
TEO32 FEO31
USB_VSS43
RFLVL/RFON26 CSO/RFOP25
TEZISLV33
OP_OUT34
OP_INN35
OP_INP36
FOO42 TRO41
USBM45
TROPENPWM39
PWMOUT1/V_ADIN940
USB_VDD346
FMO38 DMO37
HIGHA059
HIG
HA
175
HIG
HA
274
HIG
HA
372
HIG
HA
471
HIG
HA
570
HIG
HA
669
HIG
HA
768
DVDD1852
AD
791
DVSS62
APLLCAP63
AD
587
AD
486
APLLVSS64
APL
LVD
D3
65
AD
384
AD
283
AD
182
AD
081
DV
DD
373
IOA
093
IOA253
IOA354
IOA455
IOA556
DV
DD
380
IOA657
IOA758
A16
67
A17
92
DV
SS85
IOA1860
IOA1961
IOA
2076
IOA
178
AL
E90
IOO
E79
IOW
R66
IOC
S77
DV
SS94
UW
R95
UR
D96
DV
DD
1897
UP1
_298
UP1
_399
UP1
_410
0
UP1
_510
1
UP1
_610
2
UP1
_710
3
UP3
_010
4
UP3
_110
5
DV
SS11
6
UP3
_410
6
UP3
_510
7
RFV
DD
324
4R
FRPD
C24
5
DV
DD
310
8
ICE
109
PRST
110
IR11
1
INT
011
2
DV
DD
1812
2
DQ
M0
113
DQ
S011
4
RD
711
5
RD
611
7
RD
511
8
RD
412
0D
VSS
119
RD
312
1
RD
212
3
RD
112
4
RD
012
5
RD
1512
6
RD
1412
8D
VD
D3
127
RD13129
YUV0/CIN 192
FS 191
VREF 190
DACVDDC 189
RD16 188
RD17 187
RD18 186
RD19 185
RD20 184
RD21 183
DVDD3 182
RD22 181
RD23 180
DQM2 179
DQM3 178
RD24 177
RD25 176
DVSS 175
RD26174
DVDD18 173
RD27172
RD28 171
RD29170
RD30 169
DVDD3 167RD31/ASDATA5168
RA4166
RA5 165
RA6164
DVSS 163
RA7162
DVSS 161
RA8160
RA9 159
RA11158
RCLK156CKE 157
DVDD3 155
RCLKB 154
RVREF/V_ADIN3 153
DVDD18 152
RA3 151
RA2 150
DVSS 148RA1 149
RA0 147
RA10 146
BA1 145
DVSS 144
BA0 143
DVDD3 141RCS 142
RAS 140
CAS 139
RWE 138
DQM1 137
DQS1 136
DVSS 134RD8 135
RD9133
RD10 132
RD11131
DR12 130
RFG
ND
249
IRE
F25
5
SVDD324
RFG
C25
4
JITF
N23
1
JITF
O23
0
LPFO
P23
8
LPFI
N23
7
CR
TPL
P24
8
HR
FZC
247
LPFI
P23
6
CE
QN
251
RFR
PAC
246
S_V
REF
N24
3
AD
CV
SS24
1S_
VR
EFP
242
S_V
CM
240
AD
CV
DD
323
9
PLL
VD
D3
234
LPFO
N23
5
PLLV
SS23
2
MC
_DA
TA
224
SPD
IF22
5
ASD
ATA
422
2
DV
DD
1822
1
ASD
ATA
322
0
ASD
ATA
221
9
RFG
ND
1822
6
ASD
ATA
121
8
ASD
ATA
021
7
AC
LK
215
AL
RC
K21
3A
BC
K21
4
DV
DD
320
4
SPB
CK
/ASD
ATA
521
1
SPLR
CK
210
SPD
AT
A20
9
SPM
CL
K20
8
DV
DD
321
2
HSY
NC
/V_A
DIN
220
7
YU
V7/
ASD
ATA
520
6
VSY
NC
/V_A
DIN
120
5
YU
V6/
R20
3
YU
V5/
B20
2
DA
CV
SSA
201
YU
V4/
G20
0
DA
CV
DD
A19
9
YU
V3/
CV
BS
198
DA
CV
SSB
197
YU
V2/
C19
6
DA
CV
DD
B19
5
YU
V1/
Y19
4
DA
CV
SSC
193
IDA
CE
XL
P23
3
USBP44
FG/V_ADIN847
TDI/V_ADIN448
TMS/V_ADIN549
TCK/V_ADIN650
TDO/V_ADIN751
AD
688
IOA
21/V
_AD
IN0
89
DV
SS21
6
DV
SS22
3
XT
AL
O22
8X
TA
LI
229
RFV
DD
1822
7
U201
MT1389
C201 1uF
C202 1uF
C203 1uF
C204 1uF
C205 DNSC206120p
C
B
A
DRFO
R201 0RR202 0RR203 0RR204 0R
CBAD
EF
MDI1MDI2
LDO2LDO1
RFOPRFON
V2P8V20V1P4
FEOTEOTEZISLVOPOOP-OP+
DMOFMOTROPEN
C207 104
R20
7
R20
6
R20
5
C209
C208
TROFOO
L201FB
89V33
USBVDDADINTROUTTRINSTBYTRCLOSEV18A2A3A4A5A6A7A8A18A19
C214104
C2151500pF
R2120R
R210 18KR211 20K
C213330pF
C212330pF
C211104
C210153pF
R209 15KR208 10KDMSO
FMSO
TRSOFOSO
V1P4
V1P4
ADIN
L202FB
89V33
PWR
#A
16A
15A
14A
13A
12A
11
A10
A9
A20
PCE
#A
1PR
D#
AD
0A
D1
AD
2A
D3
AD
4A
D5
AD
6A
21
AD
7A
17A
0
V18
VFD
CK
VFD
AT
VFD
STSC
LSD
A
RX
DT
XD
UR
ST#
IR DQ
M0
DQ
S0D
Q7
DQ
6D
Q5
DQ
4D
Q3
DQ
2D
Q1
DQ
0D
Q15
DQ
14 R213
1K
DQ9DQ10DQ11DQ12DQ13
DQ8
RAS#CAS#WE#DQM1LIMIT
CS#BA0
BA1DMA10
DMA0
DMA1DMA2DMA3
DMA9DMA11DCKEDCLK
DMA8
DMA7
DMA6DMA5DMA4
J4
RDSCEAUIN_SL0AUIN_SL1J3
RDSID
RDSSYNCPOWER_ON_RST
VDATA3RDS_DATACLK
DTS_DO
DTS_DIDTS_CE
VOICE_DETTUNER_ON
DTS_CL
R214510R
C216FS
89V33 V18
L203FBDACVDD3 DV33
C217104
TC20110uF/16V
Y1
DV33A
Y2
Y3
Y4
Y5
Y6
VSYNC#
HSYNC#
SPMCLK
SPD
AT
ASP
LR
CL
KR215 1K
AL
RC
KA
BC
KA
CL
K
R216 (DNS)R217 (DNS)R218 (DNS)R219 (DNS)
ASD
AT0
ASD
AT1
ASD
AT2
AM
UT
EV
18
R220(DNS)
ASP
DIF
RFV
18
XI
XO
JITF
OJI
TFN
C21
80.
47uFTC202
10uF/16V
PLL
VD
D3C21
90.
047u
F
C22
00.
047u
F
C22
11u
FA
DC
VD
D3
RFV
DD
3V
REF
NV
REF
P
C22220pFC223
1000pFR22
4
100K
C22
410
4
C22
50.
033u
F
C22
610
4
C22
710
4
C22
810
4
R22315K
C229104
V1P4
AVDD3
89V
33
C233 100pF
R227 750K
JITFNJITFO
L205FB
L206
4.7R
L207 FB
L208FB
L250FB
C234
104
C235104
C236104
C237104
RFV33
PLLVDD3
ADCVDD3
RFVDD3
RFSVDD3
C238104
C239104
C2401uF
VREFN VREFP
C243104
TC20447uF/16V
C242104
TC20547uF/16V
C241104
TC20647uF/16V
C250104
C251104
C252104
C244104
C245104
C246104
C247104
C249104
C248104
C253104
C254104
C256104
C257104
C258104
V18
L235FB
L236 FBAVDD3
DV33
234
1
56
8910
7
11121314
161718
15
1920
222324
21
XS301
24P0.5mm C312
104
L318 FBSMT
L316 FBSMT
L312 FBSMTL314 FBSMT
L311 FBSMTL310 FBSMT
L308 FBSMTL307 FBSMTL306
10uH
L305 FBSMTL304 FBSMT
L303 10uH
L319
FBSMT
L320 FBSMTL321 FBSMT
L322 FBSMT
L323 10UHL324 FBSMT
C301104
TC301220uF/16V
C311
104
AVCC
E
A
V3012SB1132-S
V3022SB1132-S
R30110R
R302
10R
TC30247uF/16V
TC30347uF/16V
LDO-AV33
LDO-AV33
LDO2
LDO1
R303 0R
L301 FBSMT
MDI1
F
L317 FBSMT
B
RFOIOADC
V20
R309
10K
R308
100KR311
10K
R310
100KV3032SK3018-S
V3042SK3018-S
V3053904-S
IOA
AVCC
L234FB
C230104
V18 RFV18
R31520K
R31
410
K
R316 20K
C306151
C305104
C302104
C303104TC304
47uF/16V
R3061R
R3071R
R312 20K
R3051R
R3041R
C304 151
VINFC 1CF1 2CF2 3VINSL+ 4
VINSL- 5VOSL 6VINFFC 7
GN
D30
VCC 8PVCC1 9PGND10VOSL- 11VO2+12VOFC- 13VOFC+14
VOTK+15
VOTK-16
VOLD+17
VOLD-18
PGND19
VNFTK20
PVCC221
GN
D29
PREGND22
VINLD23
CTK224
CTK125
VINTK26
BIAS27
STBY28
U302BA5954
TRSOV1P4STBY
SL+SL-
FMSO
MO_VCC
GND
MO_VCC
SP-SP+
V1P4
FOSO
DMSO
L302FB
VCC
R31310K
R325470R
R327470R
R321 1R
R320150K
R319150K
R322680K
R317 680K R318 0R
C307 2200pF
ADINOP-OP+
V1P4SP-
OPO
C308DNS
V3088050
V3078050
V3068550
V3098550
R323
1.5K
R3241.5K
R339
10K
R326
2.2R\1/4W
TC30847uF/16V
TC30947uF/16V
LOAD+LOAD-
VCC
TRCLOSE
V3109014-S
TROPEN
(TRCLOSE1) (TROPEN1)
(TRCLOSE1)
TROPEN
LOAD-LOAD+
C309104
SP+
SL+SL-LIMIT
L309FB DV33
R228 0R
TDITMSTCKTDO
R216410K
DV33
C231104TC211
220uF/16V
L238FB
DV33
R340 1R
C3102200pF
RFSVDD3
R331 0RDQS0
R297 0RR298 0RR299 0R
PWR#PCE#PRD#
DWR#DCE#DRD#
AD
C_D
AT
R2165 0R
R2166 0R
C2167104
C2174104
SCMUTE
C2175
104
TC247
47uF/16V DA
VN
INL
RSW
MU
TE
R261 33R
ADC_DAT
R26
8
33R SP
BC
LK
R2690R
AU
DIO
_RST
TC20347uF/16V
234
1
56
XS303
XS06
234
1
5
XS302
XS05
TROUT
TRIN
C343
104
C344
104
C345
104
C346
104
URST#
C277
104
TC24847uF/16V
R32810K
R32910K
DV33
USBPUSBM
DVR979 DECODER CIRCUIT 1

1 2 3 4 5 6
A
B
C
D
E
F
654321
F
E
D
C
B
A
1 2 3 4 5 6
1 2 3 4 5 6
A
B
C
D
E
F
A
B
C
D
E
F
L232 FBSMT
L230 FBSMTL231 FBSMT
R2304.7K
VFDSTVFDAT
VFDCK
234
1XS202
XS04(DNS)
DV33RXDTXDGND
C267104
TC21047uF/16V
C281104
C2162104
C2163104
SD33L226 FBDV33
C278225
TC21747uF/16V
VD2011N4148
R25275K
R25447K R256
33R
5 6
U205CHCU04
URST#
DV33
DC/NC1
RST_/NC2
WP/RST_3
VSS4
VCC 8
RST/WP 7
SCL 6
SDA 5
U202AT24C16X4050
SDASCL
C259104
DV33
R259680R
R260680R
C26347pF C264
47pF
C26547pF
J4
A619
A1717
RY/BY15
A1816
NC14
A124
NC10
NC13
A97
A151
A142
A133
A115
A106
A88
A199
WE11
RESET12
A520
A421
A322
A718
DQ8 30
DQ9 32
DQ10 34
DQ233
DQ335
DQ15/A-145
DQ1239
DQ11 36
DQ6 42
A16 48
BYTE47
Vss 46
DQ7 44
DQ1443
DQ1341
DQ5 40
DQ4 38
Vcc37
DQ029
OE 28
Vss 27
DQ131
A223
A124 CE 26
A0 25
U214 8M_FLASH(TSOP)
A15A14A13A12A11A10A9
A18
A7A6A5A4A3A2
A16
GNDA0AD7
AD6
AD5
AD4VD
AD3
AD2
AD1
AD0DRD#GNDDCE#A1
A8R2414.7K(DNS)
VP
R24
04.
7K
R23
94.
7KR
238
4.7K
VD
C279104
A17
A19
TC23747uF/16V
R255
0R
VD DV33
AA20
L204
FB(DNS)
VCC
R253
0R(DNS)
L233 FBSMT
C26647pF
J3
C260102(DNS)
C261102(DNS)
X201
27MHz
R246 100K
C27527pF
C27627pF
XI R244
0R
XOR248
0R
10 11
U205E
HCU04
ASPDIFIEC958
R2500R(DNS)
R251
0R
A023
A124
A225
A326
A429
A530
A631
A732
A833
A934
A10/AP22
A1135
BA0/A1320
BA1/A1221
CLK38
CKE37
/CS19
/RAS18
/CAS17
/WE16
DQML15
DQMH39
NC36
NC40
VSS54
VSS41
VSS28
DQ02
DQ1 4
DQ25
DQ3 7
DQ48
DQ5 10
DQ611
DQ7 13
DQ842
DQ9 44
DQ1045
DQ11 47
DQ1248
DQ13 50
DQ1451
DQ15 53
VCC 1
VCC 14
VCC 27
VCCQ 3
VCCQ 9
VCCQ 43
VCCQ 49
VSSQ 6
VSSQ 12
VSSQ 46
VSSQ 52
U211
SDRAM 64M
DMA0DMA1DMA2DMA3DMA4DMA5DMA6DMA7DMA8DMA9DMA10MA11BA0#BA1
SDCLKSDCKE
DCS#DRAS#DCAS#DWE#
DQM0DQM1
DQ0DQ1DQ2
DQ4DQ5DQ6DQ7DQ8DQ9DQ10DQ11DQ12DQ13DQ14DQ15
DQ3
SD33
SD33
R23133R
R23233R
DM
A11
BA
1
C2160104
L222 FB
L223 FB
C270
104
C271
104TC208220uF/16V
TC207220uF/16V
DV33
AVCC
VCC
C272104
TC213220uF/16V
L227FB
DV33A
IN1
GN
D2
OU
T3
U208BA033FP(DNS)
VCC DV33
L228
FB
VD2021N4004(DNS)
VD2031N4004(DNS)
IN3
GN
D1
OU
T2
U209LM1117MP-1.8
C273104
TC209220uF/16V
R2423.3K
R2431.2K
V18
DV33
AA21
R21
404.
7K
R25
70R
R25
80R
A21
A20
R264 33RR263 33R
R265 33RR266 33RR267 33RR2162 33R
DCLKDCKE
CS#RAS#CAS#WE#
DWR#
IR
C215827pF(DNS)
L2492.7uH(DNS)
C2168104
C2170104
C2171104
C2173104
L209 FB
R2159
0R
URST#
HSYNC#VSYNC#
R291 33RACLK SACLKR292 33RR293 33RR294 33RR295 33RR296 33R
ABCK SBCLKALRCK SLRCKASDAT0 SDATA0
SDATA1SDATA2
ASDAT1ASDAT2
Y1Y2
Y3
Y4Y5Y6VGND
234
1
5
XP203
XS05
VCC
VDATA3
IEC958 R233 75R
AUDIO_RSTSDATA0
GNDSACLKGNDSBCLKSLRCKAUIN_SL0AUIN_SL1SCLSDA
DTS_DODTS_CLDTS_DIDTS_CETUNER_ON
RDSSYNC
DAVNIN
RDSIDRDSCE
R249
4.7K
VCC
Q204
9015
DV33 C274
104
SDATA1SDATA2
SCMUTELRSWMUTE
R2344.7K
VCC
R2354.7K
GND
234
1
56
89
10
7
1112
141516
13
1718
202122
19
23242526
2827
XP207
XS28
VOICE_DET
CLK
POWER_ON_RST
12 13
147
U205FHCU04
R225 0R226(dns) 0ADC_DAT
123456789
101112
XP900
CON12
DV33USB_VBUS
USBMUSBP
DGNDSPDAT
SPLRCKSPBCK
INTDVCC
L251 FBVCC
R344 33RSPMCLK
R342 33RR343 33R
R341 33R
R345 33R
SPBCLKSPLRCLKSPDATA
SPMCKDGND
vout 1
vout 5GN
D2
ce4
vin3
U203RT9701
L216FB
VCC
R34710R(DNS)
DV33
R346
10R(DNS) R34810R(DNS)
USB_VBUS
C348
104
C349
225
C347104
AUDIO_RST
SCLSDA
OPT1
234
1
56
89
10
7
1112
141516
13
1718
202122
19
23242526
2827
XP206
XS28DV33XO
DGND
R236
1K
C282
104
DVR979 DECODER CIRCUIT 2

1 2 3 4 5 6
A
B
C
D
E
F
654321
F
E
D
C
B
A
IN-O
UT
PA
RT
CIR
CU
IT
L4
5
R6
XC104BAV4
L103 RH354708
L104 RH354708
L105 RH354708
VIDEO_C
L1
2
R3
XC103AAUX-IN
L4
5
R6
XC103BMIX-OUT
L102 RH354708
L100 RH354708
C102102
C103102
D+5V
VGND
R103 68R
1234567
XP401
CON7
AGND
AUXR
AUXL
R1
L1
1110
987654321
15141312
19181716
2120
XC107CS-111
SPDIF
Y1Y2
Y3
Y4Y5Y6
R10575R
C10647P
C10847P
L106 1.8uH
D+5VVGND VGND VGND VGND
Y1
R10675R
C10747P
C10947P
L107 1.8uH
D+5VVGND VGND VGND VGND
Y2
R10775R
C11047P
C11147P
L110 1.8uH
D+5VVGND VGND VGND VGND
Y3
R10875R
C11247P
C11447P
L111 1.8uH
D+5VVGND VGND VGND VGND
Y4
R10975R
C11347P
C11547P
L114 1.8uH
D+5VVGND VGND VGND VGND
Y5
R11075R
C11647P
C11747P
L116 1.8uH
D+5VVGND VGND VGND VGND
Y6
VIDEO_Y
VIDEO_C
V-COMP
VIDIO Y1
VIDIO U
VIDIO V
VGND
VGND
RO
LO
VY
VV
VU
VY
VV
VU
VDATA3
VSYNCHSYNC
A+9V
+9V
V1008050
R11433R
R1122.2K
VGND
VDATA3
V1018050
R1151K
R1132.2K
+9V
VGND
HSYNC
R11675R
V1028050
D+5V
VSYNC
VC
V-COMP
R104330R
R1114.7K
D+5V
C105224
L119 RH354708
L118 RH354708
L120 RH354708
1234567
XC105DASW-02
L1
2
R3
XC104AAV4
L122 RH354708
L121 RH354708
C118102
C119102
C183 20P
C184 20P
C185 20P
C186 20P
C120104
C188 20P
VGND
C187 20P
R126 220R
R127 100K
VGND
SPDIF
C10120P
C12220P
C12320P
C12420PC12520P
C12620P
C129104
Y(Green)
Cr/Pr(Red)
Cb/Pb(Blue)
VGND
VGND
VIDEO_Y
123456789
10111213141516171819202122232425262728
XS206
CON28
AGND
VIDIO Y1
VIDIO U
VIDIO V
V-COMP(Yellow)
GND1
VCC2
3
XC102AAVG-2 O
XC102BAVG-2 O
GND 1
VCC2
3
XC106AAVG-2 I
XC106BAVG-2 I
C104104
R1191.2K
C137104
C134104
C130104
C12810u/16V
C136472
R11810K
L101RH354708
D3.3V
D3.3V
SDA
1
AD
02
EMPH
3
RX
P04
RX
N0
5
VA6
AG7
FIL
T8
RST
9
RM
CK
10
RE
RR
11
RX
P112
RX
P213
RX
P314
RX
P415
OSC
LK
16O
LR
CK
17SD
OU
T18
INT
19
U20
OM
CK
21
DG 22
VD 23
H/S
24
RX
P525
RX
P626
AD
127
SCL
28
N101CS8415A
C135 104
C132104
C133104
R12575R
L109FB
C12710u/16V
D+5V
C131104
D+5V
D+5V
SDOUTOLRCKOSCLK
RMCKRSTINT
SCLSDA
D3.3VR
124
47
RR
123
47
R
R11
74
7R
R10
14
7R
R12
04
7R
R10
24
7R
R12
24
7R
+9V
R12
14
7R
OMCK
VD100MMBD4148SE
VD101MMBD4148SE
VD102MMBD4148SE
VD103MMBD4148SE
VD104MMBD4148SE
VD105MMBD4148SE
VC

1 2 3 4 5 6 7 8 9 10 11 12
A
B
C
D
121110987654321
D
C
B
A
C49104
C50103
C53103
C55104
C52104
C72104
C105104
C9515p
C9615p
3.3V
VALID
MUTE
DGND
MCLK
D+3.3V
SDASCL
SDA_AD
SCLKLRCK
S DD3.3V SD
VALID
P W M _ R R -P W M _ R R +
PWM_RL-PWM_RL+
P W M _ S W +
P W M _ S R -P W M _ S R +
PWM_SL-PWM_SL+
PWM_H_MLP W M _ H _ P LPWM_H_MRPWM_H_PR
AVSS
C99104
PWM_H_MRPWM_H_PR
PWM_H_MLPWM_H_PL
PWM_RL-PWM_RL+PWM_RR-PWM_RR+
PWM_SW+
PWM_SR-PWM_SR+
PWM_SL-PWM_SL+
A V S S
S D A _ A D
SCLKLRCK
MCLK
DGND
3.3V
A V D D
R S T
MUTE
3.3V
C51104
S D A
C5410u/16V
SCL
PWM_3.3V
D V D D
R5410K
R5510K
R5710K
R6010K
R6110K
R96 47R97 47R98 47R99 47R100 47R101 47
R64200
Y 113.5M
3.3V
C56104
C5810u/16V
R70 47
R66200
R67 3.3
R1041M
R65 1
C48104
SDA_SLSRSDA_LR
SDA_CSW
RST
L8 FB
R68 2.2
3.3V
C109104
C110
10u/16V
R113
1
3.3V
C111224
C11210u/16V
R115 22
R58(DNS) 5.1K
R94 47R95 47
C22104
R27 51
C23105
PGND
C27104
PGND
PGND
C28 104
C29 104
R34 1.5
R36 1.5
C32 333
C33 333
PGND
PGND
PGND
L4 10uH
L1 10uH
VCC28A
+28.5V
C36680u/35V
PGND
C38102
C40103
R403.3
R2410
C24104
PGND
C430.47u
C900.47u
C44103
C93103
R521
R931
PGND
C25105
PGND
R25 10
S R -
R31 1
R32 1
R452K
R902K
PGND
C178103
R1821
R18122K
PGND PGND
R18020K
+28.5V
C182103
R1871
R18422K
PGND PGND
R18320K
+28.5V
C176470u/35V
C177470u/35V
C180470u/35V
R383K
R395.1K
+28.5V
R443K
R475.1K
+28.5V
PGND
SL-FR-
C170103
R1741
R17322K
PGND PGND
R17220K
+28.5V
C174103
R1781
R17722K
PGND PGND
+28.5V
C168470u/35V
C169470u/35V
C172470u/35V
C173470u/35V
S D
VALID
FL-
P W M _ S R +
PWM_SL+
PWM_SL-
VALID
SD
PWM_SL+
PWM_SL-
PWM_SR+
PWM_SR-
C181470u/35V
R17620K
SL-
S R -
R18847/0.5W
+28.5V
R19010
R18910
VC
C28A
VC
C28BR167 10K
R168 10K
R16310K
R16410K
R159 10K
V-4
1 IN-2
1 IN+3
2 IN-6
2 IN+5
1 OUT 1
2 OUT 7
+V 8
N11RC4580 HGNDC167 330u/10V
C166 330u/10V
HGND
+6.8V
HGND
C157471
C163 221
C16147p
C158471
C16247p
C164 221
HGNDHGND
H-L
H-R
R17010K
R17110K
C106104
LGND
C108 10u/16V
LO
R11447K
LGND
+6.8V
C107104
LGND
C165 10u/16V
RO
R16947K
LGND
+6.8V
C8
10u/16V
GNDMIC1
MIC2
+9V
-9V
3
21
84
N1A4558
R12.2K
R22.2K
5
67
N1B4558
C110u/16V
C210u/16V
C6 101
R4 51K
SD
C114104
R12251
C115 105
PGND
C119104
PGND
PGNDVCC28B
R17510
C116104
PGND
C175105
PGND
R11610VALID
VALID
DVSS16DVDD15/MUTE14 /PDA
13 /HP_SEL12 /RESET11
VBGAP10AVDD_PLL9 AVSS_PLL
8 VRD_PLL7 AVSS_GR6
AVSS5PLL_FLTP4PLL_FLTM3 PLL_FLT_RET
2 VRA_PLL1
RE
SER
VE
D64
MC
LK
63
PWM
_HPP
R62
PWM
_HPM
R61
PWM
_HPP
L60
PWM
_HPM
L59
PWM
_P_6
58
PWM
_M_6
57
PWM
_P_5
56
PWM
_M_5
55
DV
DD
_PW
M54
DV
SS_P
WM
53
PWM
_P_8
52
PWM
_M_8
51
PWM
_P_7
50
PWM
_M_7
49
VR_PWM48
PWM_P_447
PWM_M_4 46
PWM_P_3 45
PWM_M_3 44
PWM_P_2 43
PWM_M_242
PWM_P_141
PWM_M_1 40
VALID 39
DVSS 38
/BKND_ERR37
DVDD36
DVSS 35
DVSS 34
VR_DIG 33
VR
_DPL
L17
OSD
_CA
P18
XT
L_O
UT
19
XTL
_IN
20
RE
SER
VE
D21
RE
SEV
RE
D22
RE
SER
VE
D23
SDA
24
SCL
25
LR
CK
26
SCLK
27
SDIN
428
SDIN
329
SDIN
230
SDIN
131
PSV
C32
O
N12TAS5508PAG
C67104
C1134.7u/16V
GND1
GND2
GREG3
/OTW4
/SD_CD5
/SD_AB6
PWM_DP7
PWM_DM8
/RESET_CD9
PWM_CM10
PWM_CP11
DREG_RTN12
M313
M214
M115
DREG16
PVDD_B41BST_B 42
BST_C 43PVDD_C 44PVDD_C
45OUT_C46OUT_C47GND 48
GND 49OUT_D 50OUT_D
51PVDD_D52PVDD_D 53
BST_D 54GVDD 55
GND 56
PWM_BP17
PWM_BM18
/RESET_AB19
PWM_AM20
PWM_AP21
GND22
DGND23
GND24
DVDD25
GREG26
GND27
GND28
GND29GVDD30BST_A 31
PVDD_A 32PVDD_A 33OUT_A
34OUT_A35GND 36
GND 37OUT_B 38OUT_B 39PVDD_B
40
N13TAS5112DFD
5
6
XC100C
WP12
7
8
XC100D
WP12
123
XS114
CON3
GND1
GND2
GREG3
/OTW4
/SD_CD5
/SD_AB6
PWM_DP7
PWM_DM8
/RESET_CD9
PWM_CM10
PWM_CP11
DREG_RTN12
M313
M214
M115
DREG16 PVDD_B 41BST_B 42BST_C
43PVDD_C44PVDD_C 45
OUT_C 46OUT_C 47GND
48GND49OUT_D50OUT_D 51
PVDD_D 52PVDD_D 53BST_D
54GVDD55GND 56
PWM_BP17
PWM_BM18
/RESET_AB19
PWM_AM20
PWM_AP21
GND22
DGND23
GND24
DVDD25
GREG26
GND27
GND28 GND 29GVDD 30BST_A
31PVDD_A32PVDD_A33OUT_A 34
OUT_A 35GND 36GND
37OUT_B38OUT_B 39
PVDD_B 40
N14TAS5112DFD
S R O U T
S L O U T
R199
0R
R200 0RR201 0R
HGND LGNDGNDPGND GND
P W M _ S R -
PWM_FR-PWM_FR+
PWM_FL-PWM_FL+ PWM_FR-
PWM_FR+
PWM_FL-PWM_FL+
PGND
C120 104
C121 104
R134 1.5
R136 1.5
C129 333
C130 333
PGND
PGND
PGND
C179104
PGND
VCC28A
R132 1
R131 1
C1390.47u
C1400.1u
C1410.1u
C143103
C142103
R1441
R1451
PGND
L9 10uH
L10 10uH
+28.5V
C133680u/35V
PGND
C135102
C137103
R1403.3
R14210K
R14310K
S W +
S W - 9
10
XC100E
WP12
C123 104
C122104
R186 1.5
R135 1.5
C183 333
C131 333
PGND
PGND
L11 10uH
+28.5V
C134680u/35V
PGND
C136102
C138103
R1413.3
C1840.47u
C188103
R1971
PGND
R1851
R130 1
R1922K
R1913K
R1955.1K
+28.5V
PGND
C E N - 3
4
XC100B
WP12
C E N +
PGND
C47103
R531
PGND
PGND
C30 104
C31 104
R35 1.5
R37 1.5
C34 333
C35 333
PGND
PGND
PGND
C26104
PGND
L3 10uH
L2 10uH
+28.5V
PGND
VCC28B
C39102
C41103
R413.3
R30 1
R33 1 C46103
R511
PGND
C450.47u
PGND
R492K
R483K
R505.1K
+28.5V
FLOUT
FROUT
C420.47u
R432K
R423K
R465.1K
+28.5V
FL-
FR-
1
2
XC100A
WP12
11
12
XC100F
WP12
PGND
PWM_SW-
PWM_SW+ P W M _ S W +
P W M _ S W -
PWM_CEN-
PWM_CEN+
P W M _ C E N -
P W M _ C E N +
PWM_FL+
PWM_FL-
PWM_FR+
PWM_FR-
PWM_FL+
PWM_FL-
PWM_FR+
PWM_FR-
R2020R
R2030R
R2040R
R2050R
R2060R
R2070R
R2080R
R2090R
R2100R
R2110R
R2120R
R2130R
C187103
R1961
R19422K
PGND PGND
R19320K
+28.5V
C185470u/35V
C186470u/35V
P W M _ C E N +P W M _ S W -
P W M _ C E N - PWM_CEN+PWM_SW-
PWM_CEN-
C37680u/35V
C E N -
PGND PGND
PGND
S D
3.3V
+28.5V
PGND
+28.5V
PGND
P G N D
A U X L
A U X R
TU_L
TU_R
AUIN_SL0
AUIN_SL1R764.7K
R774.7KA+5V
C74104
R814.7K
C76101
C77101
C75104
R78 4.7K
R79 4.7K
1
MIC(1)
0
TUNER(3)
0
1 AUX(2)1
1
0
AUIN_SL1 OUTPUT0
AUIN_SL0
R834.7K
O K
A G N DA U X R
A U X L
RO
LO
+9V
FR
OM
MA
IN B
OA
RD
R S T
SDA_LR
S D A _ S L S R
S D A _ C S W
SCLK
LRCKAUIN_SL0AUIN_SL1
DTS DODTS CLDTS DIDTS CETUNER_OND A V N I N
MUTE
H M U T
SCLS D A
硬件复位信号
M1
M0
R8410K
R8510K
R8610K
TU+5V
D A V N I NS D ASCL
SDASCL
C117561
Y 24.332MHzC11815p
C12415p
C81331
RDS_MPX
R8910
R13710
C1254.7u/16V
C126104
C127104
C12847u/16V
R91220/0.5W
VD35.1V
R9210K
V 5S8550
C9447u/16V
+9V
D T S _ C E 1DTS_DI1DTS_CL1DTS_DO1
RDS_MPXA G N D
R123 220R124 220R125 220R126 220
C88104
C85220u/16V
L5 FBTU+9V
R121 10KR120 10KR119 10KR117 10K
TU+5V
TU+5V3.3V
R138 4.7K
R1394.7K
R1331K
LO
RO
HDET
MCLK
SCLKLRCK
S D A _ A DL6FB
C844.7u/16V
C874.7u/16V
R87 10K
C78104 C79
47u/16VC83104
C8610u/16V
L7FB
3.3V
M01
MCLK2
VL3
SDA4
GND5
VD6
SCLK7
LRCK8
RST9AINL 10
VQ 11AINR 12VA
13RGND14FILT+ 15
M1 16N7 CS5340
R885.1
C82104
R S T
C914.7u/16V
C924.7u/16VC80104
R802.2K
R822.2K
SDA_SLSR
SDA_LR
SDA_CSW
LRCK
SCLK
RST
SDA_ADMUTE
D+3.3V
-9VHGND
+9V
A G N DA+5V
C89102
V 69014
1234
XS101
CON4
1234567
XP112
CON8
123456789
10111213141516171819202122232425262728
XS108
CON28
12345678
XS104CON8
A G N D
H D E T
MRO1
MPTH2
TCON3
OSCO4
OSC15
VSSD 6
VDDD 7DAVN8
SDA9
SCL10
PSWN11
MAD 12
AFIN13
VDDA 14
VSSA15
MPXIN16
Vref 17
SCOUT18
CIN19
LVIN20
N6 SAA6588
N4A74HCT125
N4B74HCT125
N4C74HCT125
N4D74HCT125
N3A74HCT125
N3B74HCT125
N3C74HCT125
N3D74HCT125
3 4
N2BSN74LVC2G04DBVR
1 6
N2ASN74LVC2G04DBVR
Y 312.288MHz C1815p
C1715p
R8 1M
R2947
R5647
R5947
R6347
R6947
R6247
X012
X114
X215
X311
Y01
Y15
Y22
Y34
INH6
A10
B9
VEE 7
X 13
Y3
VDD 16
VSS8
N5
CD4052
A+5V
A+5V
-9V
C61 104
C57 47u/16V
A+5V
R222 10K
R221 10K
3.3V
3.3V
R217 1K
R218 1K
R219
10K
V 42N5551
R220
10KR72
10K C62
10u/16V
C66103
C71103
C65103
C64103
C68103
C69103
C70103
3.3V
R224 0R
R223 0R
3.3V
C59 104
C19 47u/16V
C20 102C60
104C21
102
C6347u/16V
+6.8V
LGND
C19010u/16V
C18910u/16V
C73221
C171221
-9V
+9V
HGND
SDA_LRS D A _ S L S R
S D A _ C S W
R22547
3.3V VDD
GND
VCC
C9
104
C11
104
C13
104
C12
104
C10
104
C191101
C192101
C193101
C194101
C195101
C196101
R1034.7K
R1024.7K
R10727K
R10627K
R108 27K
R10927K
C97681
C98681
C102 101
C100101
LGND
LGND
R1054.7K
R1564.7K
R15727K
R15827K
R161 27K
R16227K
C154681
C155681
C101 101
C156101
C159102
LGND
LGND
R165 22K
C160105
R166 10K
+6.8V
LGND
PWM_RR+
PWM_RR-
PWM_RL+
PWM_RL-
LGND
3
21
N8ATLV272
5
67
N8BTLV272
3
21
N9ATLV272
5
67
N9BTLV272
R1412K
C1482p
R15 220K
LGND
+6.8V
LGND R1722K
C197105
R16 10K
R1812K
C13282p
R19 220K
C198102
LGND
LGND
C103104
R1104.7K
C10410u/16V
R1114.7K
+6.8V
LGND LGND LGND
R201K
R214.7K
VD51N4148
VD61N4148
C200104
C199104
+9V
-9V
R226100R
VD1 1N4148
R2304.7K
L12FB
东莞市步步高视听电子有限公司
BBK第 张 共 张 版次:
设 计
更 改
审 核
数 量
标 准 化
更改单号 签 名
批 准
日 期
1-Jun-2005 李林存
DVR979功放板电原理图
VD71N4148
R31K
3.3V
VD85.6V
+9V
VD91N4004
VD101N4004
1234567891011
XS113
CON11
TU+9V
DTS_DO1DTS_CL1DTS_DI1
TU_R
TU_L
DGND
H-RH-L
D T S _ C E 1
L13 100uH
R1981K/3W
PGND
RO1
RO1
LO1
LO1
C15322U/16V
HMUT
HGND
R15410K
+6.8V
C201104
R5 47
C202104
C203104
C204104
H-R
H-L
D+3.3V
L14 100uH
VD126.8V
R24147/0.25W
R242
270
C14847U/16V
V22N5551
C149
47U/16V
C150104
+6.8V
R16047K
HGND
3.3V
H D E T
C205
10u/16V
C206
10u/16V
R245
100
R243
4.7K
R2441K
V7 5401
V98050
V88050
LGND
LGND
LINE_MM
U1
R94.7K
+6.8V
MU1

1 2 3 4 5 6
A
B
C
D
E
F
654321
F
E
D
C
B
A
C520104/50V
L505
10uH/1A
C521104/50V
L506
10uH/1A
L507
10uH/2A
XC501 104X2
31
42
L501SE198920mH
H-GND
H-GND
TC518470uF/50V
R5224.7K
R5203K
R5191.8K
R50375R
U502HS817/PC817
TC
501
330u
F/4
00V
H-GND
C501103/1KV
FL-FL+
CPU5V
DGND
C517 101/50V
C513 101/50V
C518 101/50V
C515 101/50V
C502101/1KV
H-GND
TC5071000uF/16V
TC513220uF/16V
TC514220uF/35V
TC5101000uF/16V
TC5092200uF/16V
TC5112200uF/16V
TC5121000uF/16V
C510 101/50V
TC5062200uF/16V
H-GND
R501
680K/1W
A+5V
DCVPP
U505HS817/PC817
H-GND
R511
47R
R51047K/2W
C527102/50V
C526
104/50V
C505103/1KV
C504104/50V
H-GND
C523101/50V
L50
8
10uH
/5A
TC5162200uF/50V
TC5031uF/50V
H-GND
R53024K
C506473/50V
12
XS100~220V
TC508470uF/16V
DGNDD+5V
D+3V3
D+5V
D+3V3
AGNDA+5V
1234
XS101
P+28VPGNDPGND
P+28V
FL+
FL-
-21V
A+5V
R521220R
R516
1R/1W
YC503102Y1
P +28V
C512473/50V
C511473/50V
R526
33R/1W
PHGNDA-10VAGND
A+10V
C516473/50V
C514473/50V
H-GND
C524101/50V
R527
33R/1W
TC5172200uF/50V
!
!
!
!
!
!
!
!
!
!
C525473/50V
R50847K/2W
R50968K/2W
DV
R979/939 P
OW
ER
CIR
CU
IT
FL+FL-
CPU5V
A+5V
A+10V
D+5V
D+3V3
A+5V
P +28VP +28V
A-10V
DGND
AGND
AGND
DGND
PHGND
12345
XS105
CPU5V
R53210K
R5331.5K
L504
10uH/1A
R513
22K
C507
101/50V
A K
G
Q501MCR100-6
CPU5V
R514
1.2K
C508104/50V
STBY
TC505
47uF/50V
C509473/50V
!
R515
10K
D506
HER105
D513HER105
D502HER107
D505HER207
D517BYW29E200
D516BYW29E200
D507
HER105
D509SR560
D510SR560
D511SR560
D512HER105
D5141N4148
D515SR160
D5081N4148
D5181N4148
D503
HER105
R5181K
C519104/50V
R517150R
F50
1T
3.15
A/2
50V
U506TL431
R5281K/3W
SYN
C5
FB4
VC
C3
GN
D2
DR
AIN
1
U504KAIM0880BTU
2
3
4
6
79
13
12
10
11
1415
16T501
BCK-28-0598
2
3
4
6
810
13
11
14
T502BCK-40-0244
RT501
NTC103
RV50107D471
R505 300R
A+10V
R525330R/1W
TC515470uF/25V
C522473/50V
ZD502C9V1
A-10V
123456
XS102
12345678
XS104
-21V
STBY
-21V
STBY
H-LH-R
H-LH-R
31
42
L502SE1989 20mH
XC502 104X2
YC501102Y1
YC502102Y1
EGND
AC2
V+
1
AC 3
V-
4
BD501KBL04
!
!
!
!
1234
XS103
PHGNDH-L
H-R
H-L
H-RPHGND
ON
/OFF
ON/OFF
U507HS817/PC817
H-GND
R523
330RCPU5V
R524
10KSTBY
TC50247uF/50V
ZD501C5V1
R50275K/2W
R5292.2K
TC50447uF/50V
R531
47K
V5032N5551
H-DET H-DET
H-DETH-DET
U503TL431
ADJ1
FB2
CS3 Vcc 6
DRV5
HV 8
NC 7
GND4
U501
NCP1200D
D501HER107
V501IRFBC20D504
HER105
R5071R/1W
H-GND
L503FB RH357508
R50430K
H-GND
R506 1.5K
R534
0R47/1W
R535
0R47/1W
DCVPP
AGND
DGND
C503102/50V
R5364.3K
R5373K
R538
10R/2W TC520470uF/16V
C528473/50V
R539
10R/2W
V5042N5551
V5022N5551
H-GND
R512
750K/0.5W R5403K
H-GND
!
Vin1
Vout3
GND2
U508LM7805