-
PROCESSO DE DETECÇÃO E SÍNTES DE CONTORNOS NO CEL SHADING
UTILIZANDOFILTROS DIGITAIS
Daker Fernandes Pinheiro
CIn - UFPE
ABSTRACTNon-photo-realistic methods are becoming more usual
inmany media formats. Cel Shading is one of the most usedtechniques
which transforms 3D models into non-photo-realistics images used in
the market. This article aims toshow one of the most eficient
techniques based on digitalfiltering for the detection and
synthesis of contours in CelShading and its limitations.
Index Terms— Cel Shading, Rendering, Edge Detection,Digital
Filter, Ink Synthesis
ABSTRACTMétodos de vizualização não foto-realísticas são cada
vezmais comuns nos diversos tipos de mídia. O Cel Shading éuma das
principais técnicas de transformar modelos 3D emimagens não
foto-realísticas utilizadas no mercado. Esse ar-tigo visa mostrar
uma das técnicas mais eficientes baseada nouso de filtros digitais
para a detecção e síntese de contornosde objetos no Cel Shading e
suas limitações.
Index Terms— Cel Shading, Renderização, Detecção deArestas,
Filtros Digitais, Síntese de Linhas
1. INTRODUÇÃO
O Cel Shading é uma técnica de visualização de modelos 3Dque não
tem o foto-realismo como foco, tentando incorpo-rar elementos de
imagens desenhadas no processo de shading[1]. O principal passo
para uma técnica de shading ser con-siderada um cel shading é a
quantização da cor sobre umapalheta de cores [3]. Essa técnica é
aplicada a filmes e jogospara dar um ar mais lúdico a mídia com a
vantagem de pou-par o trabalho de fazer ilustrações manualmente. No
caso dosjogos, é um fator ainda mais crucial porque fazer jogos
maiscomplexos sem modelos 3D é impraticável.
Para realizar um Cel-Shading existem várias técnicas co-nhecidas
mas a que quase todas as implementações involvemtrês passos bem
estabelecidos. A primeira é a renderizaçãodo modelo 3D utilizando
alguma técnica de shading qualquercomo por exemplo Flat, Gouraud,
Phong ou Ray Tracing [4].Com a cena renderizada o próximo passo é a
quantização dascores da cena, isso ajuda a dar um ar cartoon a cena
já queos objetos ficarão com áreas grandes com cores uniformes,
Fig. 1. Cena do jogo Viewtiful Joe que utiliza Cel
Shading[5].
Fig. 2. Cena do filme Iron Giant que também utiliza a
técnica[6].
como se fossem desenhados [2]. O último passo é o desenhodo
contorno, ou síntese de linhas, dos objetos da cena para dara ideia
da tinta das linhas feitas à mão seja ela com um lápis,caneta,
pincel ou até mesmo feito por uma pessoa desenhandoem um editor
gráfico 2D.
Para o desenho de contorno de objetos existem diver-sas técnicas
de detecção e desenho dentre as quais duas sãoas mais utilizadas.
Uma dessas técnicas é o "backface cul-ling"que utiliza a geometria
dos objetos para criar as regiõesde bordas como o shading. A outra
técnica utiliza processa-mento de imagem para criar o efeito de
bordas nos objeto.Esse artigo irá focar nas estrategias de desenho
de bordaspara o modelo 3D utilizando técnicas de detecção de
arestasbaseada em filtros digitais seletores de frequência.
Este artigo traz na seção 2 uma análise das informaçõesque podem
obtidas por adaptações dos algoritmos de renderi-zação já
existentes para detecção e síntese de arestas. A seção3 traz a
descrição do processo de detecção de arestar a par-
-
tir dos dados obtidos conforme específicados na seção 2. Aseção
4 mostra como as informações das arestas obtidas na se-ção 3 podem
ser combinadas para síntetizar linhas na imagemfinal. Por fim temos
uma análise sobre a área e este artigo.
2. INFORMAÇÕES DISPONÍVEIS PARA DETECÇÃODE CONTORNOS
Duas informações valiosas que podem ser extraídas de mo-delos
geométricos de objetos são as o normais da superfíciedo objeto e a
distância entre objetos, que o sistema ótico hu-mano utiliza para
consiguir distinguir objetos. Essa distinçãodos objetos como peças
separadas são expressas pelo homemquando vai desenhar objetos. A
detecção de arestas de ima-gens fotográficas é um problema bastante
complexo devido agrande perda de informação de distâncias e forma
da superfí-cie dos objetos reais. Os dispositivos de captura de
imageminserem esse erro devido a projeção (perspectiva ou
ortogo-nal) que devem ser impostas a cena para ser transformada
emimagem. Apesar das informações de superfície e distânciasentre os
objetos serem perdidas na captura de cenas reais, es-sas
informações podem ser facilmente extraídas no processode
renderização de uma cena virtual já que o que está sendomanipulado
são modelos geométricos precisos. A informa-ção de arestas extraída
diretamente da imagem serem úteispara encontrar regiões de
contorno, no entanto podem con-fundir regiões de contorno com
diferenças de textura dentrode um objeto, tornando o uso de filtros
de diferenciação diretona imagem muito menos confiáveis.
2.1. Mapa de profundidade
As implementações existentes de Phong e Gouraud
Shaddinggeralmente utilizam o algoritmo de visualização
Z-Bufferpara decidir conflitos de quais objetos devem aparecer
nafrente dos outros [7][8]. O Z-Buffer mapeia cada pixel daimagem
com a profundidade do objeto correspondente ao pi-xel para decidir
se um outro objeto, dada a sua pronfundidade,se ele deve ficar na
frente ou não do pixel que já está no bufferde renderização. Como
produto do algoritmo temos o mapade profundidade da cena em mãos, o
que é uma informaçãopreciosa para definir regiões de contorno.
Algoritmos maisrebuscados como o Ray Tracing e suas variações não
utilizamo Z-Buffer, porém o mapa de profundidade pode facilmenteser
computado.
2.2. Mapa de normais
O mapa de normais (ınormal map) de uma cena é uma cons-trução
similar ao mapa de profundidade, mas ao invés de ma-pear a
profundidade do pixel pintado, o mapeamento é feitoem relação ao
vetor normal da superfície que o pixel em ques-tão representa. Ao
contrário do Z-Buffer que já nos dá o mapa
Fig. 3. Representação gráfica do mapa de profundidade emuma cena
a luminânica da cor é proporcional a distancia doponto em relação a
camera.
de profundidade como subproduto. O mapa de normais nor-malmente
não é armazenados, porém o cálculo das mesmassão realizados para
calcular a cor da superfície em pontos es-pecíficos, então o do
mapa de normais poderá ser facilmenteadaptado a qualquer um dos
algoritmos de visibilidade. Valeressaltar que o vetor normal da
superfície é armazenado comoo seu versor.
Fig. 4. Representação gráfica do mapa de normais de
objetosdiversos, onde as componentes de cor definem a direção
dovetor normal de cada pixel.
3. TÉCNICAS DE DETECÇÃO DE CONTORNO EMMODELOS 3D
Com o mapa de normais e o de profundidade em mãos, atarefa de
encontrar as regiões de contorno se tornam muitomais plausível do
que se tivéssemos apenas a imagem comoinformação. Para efetuar a
detecção das arestas os dois ma-pas são análisados separadamente
(possívelmente em para-lelo). Quando as informações não puderem ser
extraídas deum mapa poderão ser extraídas de um dos mapas. O
outromapa servirá como complemento para extrair tais informa-ções.
A seguir mostrarei como ocorre a detecção em cadamapa.
-
3.1. Detecção de contornos a partir do mapa de profun-didade
Sempre que temos objetos em cena uma forma de descobrir-mos que
são objetos distintos é examinar quando a distânciadeles é
diferente, ou seja, um objeto vai estar sobreposto ouocludido em
parte por outro objeto da cena. Com o mapa dedistância, se
deterctarmos mudança brusca de distâncias en-tre a distâncias de
dois pixels da imagem, então aquilo denotao limite entre objetos.
Para encontrar esse tipo de variação,um filtro de Sobel geralmente
é utilizado, porém qualquer ou-tro filtro de detecção de arestas é
adequado para essa aplica-ção. Após a aplicação do filtro, é
necessário um valor de cortepara estabelecer se o valor do mapa de
profundidade corres-ponde ou não uma aresta. Quanto maior o valor
no pixel, maisbrusca foi a transição de distância entre os pontos
da imagem.Esse valor deve ser testado para vários ângulos e
situaçõespara que haja a minimização tanto das falsas arestas
sendodetectadas quanto das arestas que não foram detectadas.
Esseprocesso de discretizar uma imagem em menos informaçõesé
chamado de quantização e também é bastante útil em outrastécnicas
de processamento de imagem.
Fig. 5. Aplicação do filtro de Sobel sem quantização em ummapa
de profundidade com valor de corte arbitrário.
3.2. Detecção de contornos a partir do mapa de normais
O mapa de normais nos auxilia a detectar arestas porque con-tém
a informações das transições bruscas entre os vetores nor-mais da
superfície que significa que temos na imagem umaregião de objetos
com bordas "pontudas"que faz a normalde um ponto modificar bastante
o ângulo em uma pequenadistância do espaço. A detecção de arestas
no mapa de nor-mais é bem similar ao que é realizado no mapa de
profun-didade, a diferença é que o mapa de normais é composto
detrês camadas, cada uma representando a coordenada x, y e zdo
versor da normal em cada pixel. A diferença deve apa-recer como o
ângulo entre os vetores normais da superfície:cos(u, v) = 〈u, v〉.
Como o fator de discretização deve serapenas um threshold, então
podemos utilizar a distância eu-clidiana entre pontos que a função
cosseno está diretamenterelacionada. Como o espaço de versores pode
ser visto como
a superficie de uma esfera de raio r, onde r = 1, afirma-ção
anterior se aplica, mesmo a relação distância-ângulo nãosendo
linear, porém uma é crescente em função da outra, e oque
necessitamos é apenas da informação de quem está acimaou abaixo de
um dado limiar.
Uma forma mais rápida de fazer a análise de mudançabrusca de
direção é aplicar o mesmo processo de filtragemutilizado no mapa de
profundidade para cada camada e somaras camadas e aplicar a
quantização binária. Note que isso ébem similar ao processo
descrito anteriormente só que ele jácalcula a contribuição de cada
camada do mapa de normaispara a mudança de ângulo e depois combina
com uma soma(como no cálculo de distância).
É importante notar que pode ocorrer aliasing quando umaregião é
muito detalhada ou está muito distante do observa-dor. Para
minimizar os efeitos colaterais da filtragem no mapade normais
seria utilizar um filtro adaptativo que levasse emconta a
profundidade do pixel no processo de filtragem domapa de normais.
Outra alternativa é não utilizar as arestasdetectadas por esse
processo quando a distância do pixel pas-sar uma distância limiar,
para evitar inserir esse tipo de errona cena. Apesar desses erros
serem bastante comuns em ce-nas genéricas, porém as cenas onde o
cel-shading é aplicadocostuma ser minimalista, já que a intenção é
parecer algo feitoa mão.
Fig. 6. Aplicação do filtro de Sobel sem quantização em ummapa
de normais.
4. COMBINANDO AS INFORMAÇÕES
Com os mapas de contorno gerados a partir dos mapas denormais e
de profundidade basta fazer uma operação de ORbinário para cada
pixel dos mapas de contornos e gerar comoresultado o mapa de
contorno identificados pelas duas formas.Agora basta executar uma
multiplicação pixel a pixel com omapa de cores para adicionar as
bordas pretas ao desenho. Opasso de desenho de arestas funciona com
ou sem a quanti-zação da imagem, porém a quantização ajuda mais a
dar o arcartoon às imagens geradas.
As regiões de contorno nem sempre são geradas de uma
-
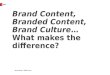
Fig. 7. Overview do processo de obtenção do mapa de con-tornos.
Retirado de [2].
forma que ficariam como se tivessem sido desenhados a mão.Para
esse problema não existe solução definitiva apesar dejá termos bons
resultados como por exemplo o jogo Okami[9]. O que normalmente é
feito é um pós processamento ma-nual ou supervisionado para
corrigir defeitos da automaçãodo cel shading em filmes e animações,
mas em aplicações emtempo real não é possível corrigir. Existem
algumas aborda-gens como em [10] que tentam descrever um padrão de
comoa tinta interage com papel e o como é o padrão de traços eforça
que seres humanos exercem no papel ou tela quandodesenham.
Fig. 8. Combinação do mapa de cores com o mapa de contor-nos
para gerar a imagem final.
5. CONCLUSÃO
Apesar do Cel Shading como um todo ser uma técnica quejá é bem
aplicada na indústria, boa parte do processo aindanão é
automatizavel com perfeição de forma a tornar o de-senho das
arestas mais natural. A área de síntese realistade linhas merece
mais investigações para encontrar mode-los que descrevem a
interação tinta-homem-papel de maneiramais próxima ao natural.
Algumas informações mais precisascomo a correlação
distância-orientação da superfície poderiaser melhor utilizada para
obter melhores sínteses. Outra in-formação que geralmente é deixada
de fora é a morfologiadas curvas dos contornos dos objetos, que
pode acentuara di-ferença da síntese de partes mais curvas ou retas
de um de-senho, como ocorre quando desenhamos um desenho
ondedetalhamos mais algumas partes do que outras.
6. REFERENCES
[1] Wikipedia Cel Shading Article. Disponívelem
http://en.wikipedia.org/wiki/Cel-shaded_animation.
[2] Cartoon-Looking Rendering of 3D-Scenes Philippe De-caudin.
June 1996.
[3] Real-Time Rendering of Cartoon Smoke and Clouds Mor-gan
McGuire, Andi Fein. June 2006.
[4] Super Cel Shader 1.00 Tips and Tricks. Disponí-vel em
http://www.celshader.com/classic/celshade.html.
[5] Jogo Viewtiful Joe. Informações disponíveis em
http://www.capcom.com/vj/.
[6] Filme Iron Giant. Informações disponíveis em
http://www.warnervideo.com/irongiantdvd/.
[7] OpenGL & OpenGL Utility Specifications. Disponível
emhttp://www.opengl.org/documentation/specs/.
[8] Phong Shading and Gouraud Shading XichunJennifer Guo e Bruce
Land. Disponível
emhttp://www.nbb.cornell.edu/neurobio/land/oldstudentprojects/cs490-95to96/guo/report.html.
1996.
[9] Jogo Okami. Informações disponíveis em
http://www.okami-game.com/.
[10] Simple Cellular Automaton-based Simulation of InkBehaviour
and Its Application to Suibokuga-like 3D Ren-dering of Trees Qing
Zhang, Youetsu Sato,Jun-ya Ta-kahashi, Kazunobu Muraoka and
Norishige Chiba. 1999John Wiley & Sons, Ltd.