Embed Size (px)
Citation preview

RoboticsRobotics & AI & AI LabLab coursecourseProjects 2009/10
Giuseppina Gini

Prof. GiniDEI – Robotics
2 broad areas of research:
Robotics –bioinspired and autonomous
e-science and bioinformatics

Prof. GiniDEI – Robotics
3Bioinspired robotics
Imitation from nature:
structure
functions
behavior
Furby toy
Prof. GiniDEI – Robotics
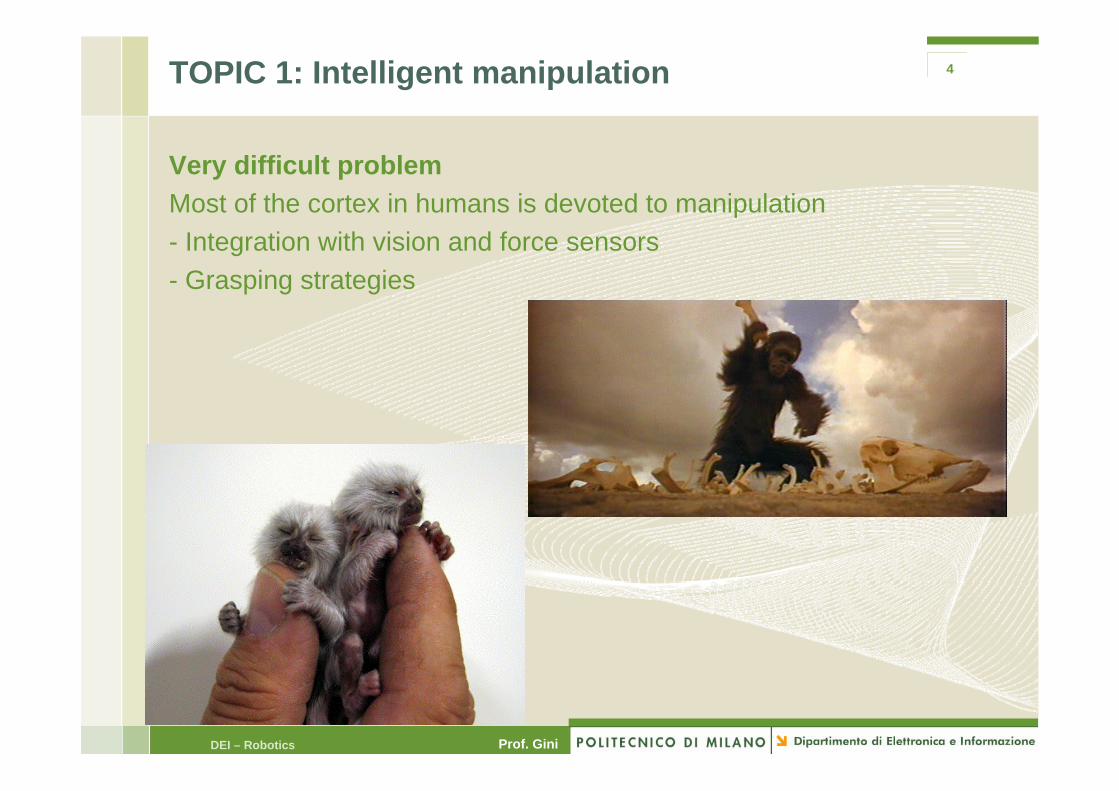
4TOPIC 1: Intelligent manipulation
Very difficult problemMost of the cortex in humans is devoted to manipulation- Integration with vision and force sensors- Grasping strategies

Prof. GiniDEI – Robotics
5Available hardware
Maximum One (2003)
WhiteFingers (2002)
wrist (2009)
neck (2009)

Prof. GiniDEI – Robotics
6
Now:
• 7 GDL
• 12 actuators
• 0.5 Kg
• load: 1Kg
Tomorrow:
1. Complete hand actuation
2. New head with 2 moveable cameras
3. New FPGA controller
Additions (hw)
Prof. GiniDEI – Robotics
7
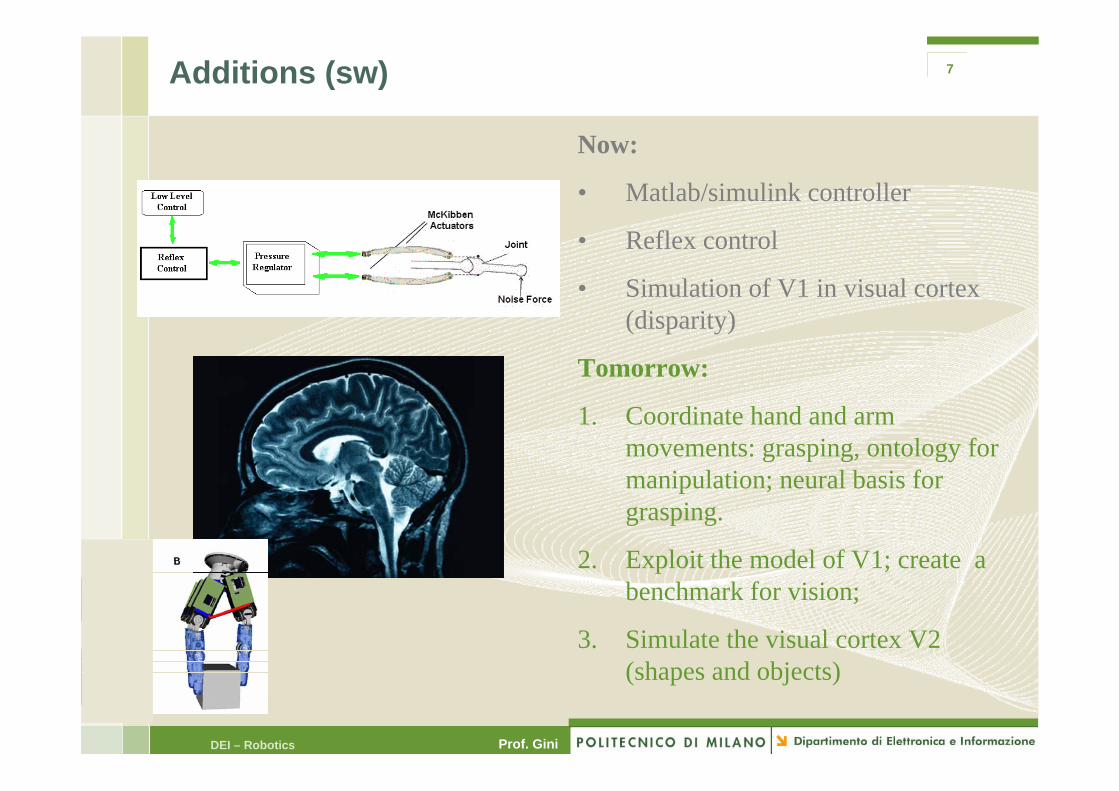
Now:
• Matlab/simulink controller
• Reflex control
• Simulation of V1 in visual cortex(disparity)
Tomorrow:
1. Coordinate hand and armmovements: grasping, ontology formanipulation; neural basis forgrasping.
2. Exploit the model of V1; create a benchmark for vision;
3. Simulate the visual cortex V2 (shapes and objects)
Additions (sw)

Prof. GiniDEI – Robotics
8Walking, swimming, and running robots
Legs
CPG
Dynamics
Interface

Prof. GiniDEI – Robotics
9Legged robots in lab
Ulisse (1994)LARP (2003)
ASGARD(2004)WARUGADAR(2008)
EMBOT (2008)

Prof. GiniDEI – Robotics
10LARP: (Light Adaptive Reactive biPed)
Height:1m
Weight:5Kg
Total active DOF: 12
- 3 in the hip
- 1 in the knee
- 2 in the ankle
Total passive DOF:4
- 2 in the footTo do:
Extending the simulator
Compute energy consumption
Walk

Prof. GiniDEI – Robotics
11warugadar
ADD:
- integration withexternal sensors
-Walking up and down hill
-CPG controller
•12 GDL
•ServoMotors
•Micro-controller on board

Prof. GiniDEI – Robotics
12EMBOT
4 legged running robot
ADD
Complete and experiment

Prof. GiniDEI – Robotics
13Fish
Zoidberg, 2008- EAP actuated
ADDAutonomous control

Prof. GiniDEI – Robotics
14Bioloid: mobile manipulation challenge
Mobile manipulation challenge at ICRA 2010
- Cleaning a room- Loading a dishwasher- Playing board games
- Experiment with differentarchitectures

Prof. GiniDEI – Robotics
Lego: emergent behaviors
Build robot colonies
(6 robot at max)
Use Braitemberg theory

Prof. GiniDEI – Robotics
16Mirror neurons and imitation learning

Prof. GiniDEI – Robotics
17Imitation of arm movements
Theory of imitation and modelling
Experiment

Prof. GiniDEI – Robotics
18Robot as interface
Hand prosthesis
Exoscheleton for rehabilitation
Haptic interface

Prof. GiniDEI – Robotics
19Robotic prosthesis
0 2000 4000 6000 8000 10000 12000 14000 16000-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Wavelet ANN
Available
EMG acquisition
Classifier
To do
Controller
velocity/force
analysis

Prof. GiniDEI – Robotics
20Haptic glove
WhatWhat wewe havehave
--anan interface interface toto
capturecapture position and position and forceforce datadata
WhatWhat toto dodo
-- hardware hardware forfor forceforce detectiondetection
--learninglearning systemsystem
-- visualizationvisualization systemsystem

Prof. GiniDEI – Robotics
21Other sensing: e-nose
He_knows (multisensor, NN)
To do
recognition software
New hardware

Prof. GiniDEI – Robotics
22New interfaces: PyRo
Python Robotics. The goal of the project is to provide a programming environment
for easily exploring advanced topics in artificial intelligence and robotics without having to worry about the low-leveldetails of the underlying hardware.
NEW:Contribute new interfaces to our robots

Prof. GiniDEI – Robotics
23OOPS
TO DO
Develop an application
for
humanoids and
quadrupeds

Prof. GiniDEI – Robotics
24Project list
HUMANOIDSBIOINSPIRED ROBOT HEAD FOR VISION
NEW HARDWARE FOR MAXIMUMOne
SIMULATOR OF HUMANOID ROBOT.
INTEGRATING MANIPULATION AND VISION
MANIPULATION ONTOLOGIES
PATH PLANNING AND COLLISION AVOIDANCE IN OOPS
ROUTER WIRELESS FOR ROBOT CONTROL
WALKING ROBOTSKINEMATIC/DYNAMIC MODEL OF WARUGADAR
EMBOT WALKING
EXPERIMENTS WITH LEGO
EXPERIMENTS WITH BIOLOID
GAIT GENERATION AND CONTROL FOR WARUGADAR
ROBOFISH
EXOSCHELETON AND PROSTHESISADVANCED EMG ANALYSIS
WHITEFINGERS AS AN HAND PROSTHESIS
HAND PROSTHESIS USING ROBOTICS PRINCIPLES
SENSORS AND VISIONNEURAL-BASED VISION SYSTEM
RECOGNITION OF HAND MOTIONS
SEMANTIC MODELLING OF ACTIONS

Prof. GiniDEI – Robotics
252- E-sciencee-Science is the road to develop science
through distributed global collaborations enabled by the Internet.
- - it will require access to very large data collections, very large scale computing resources.
- - unseen correlation between such large data would be automatically detected by data mining and inductive systems.
“Now, with the human genetic code at last published and loadedonto CD-ROMs and DVDs, scientists are talking about a newera of medicine in which medical discoveries will be made not'in vivo' (in life) or 'in vitro' (in test tubes), but 'in silico,' or on computers."
—Rick Weiss

Prof. GiniDEI – Robotics
26Environment - health
Only 5% of availablechemicals have
biological effect data
In EU about 120000 chemicals to be
assessed in REACH
In vivo –millions of animals
In vitro – difficult relation with in vivo
In- silico
REACH
Registered chemicals: 28 millions

Prof. GiniDEI – Robotics
27The information side
Representation
Fingerprint (fragmentcount)Structural alerts(isomorphism)
Ligand (path planning)

Prof. GiniDEI – Robotics
The elements for knowledge discovery
Bioinformaticscan link resources and reveal known/unknown information about gene
and proteins, their relationships to biological functions and diseases.
Data Miningcan identify the therapeutically interesting targets present in the huge
corpus of knowledge.Molecular modelingallows exploration of target candidatesDockingplaces ligands in target active siteQSARcompares compounds activities to their structures
Prof. GiniDEI – Robotics
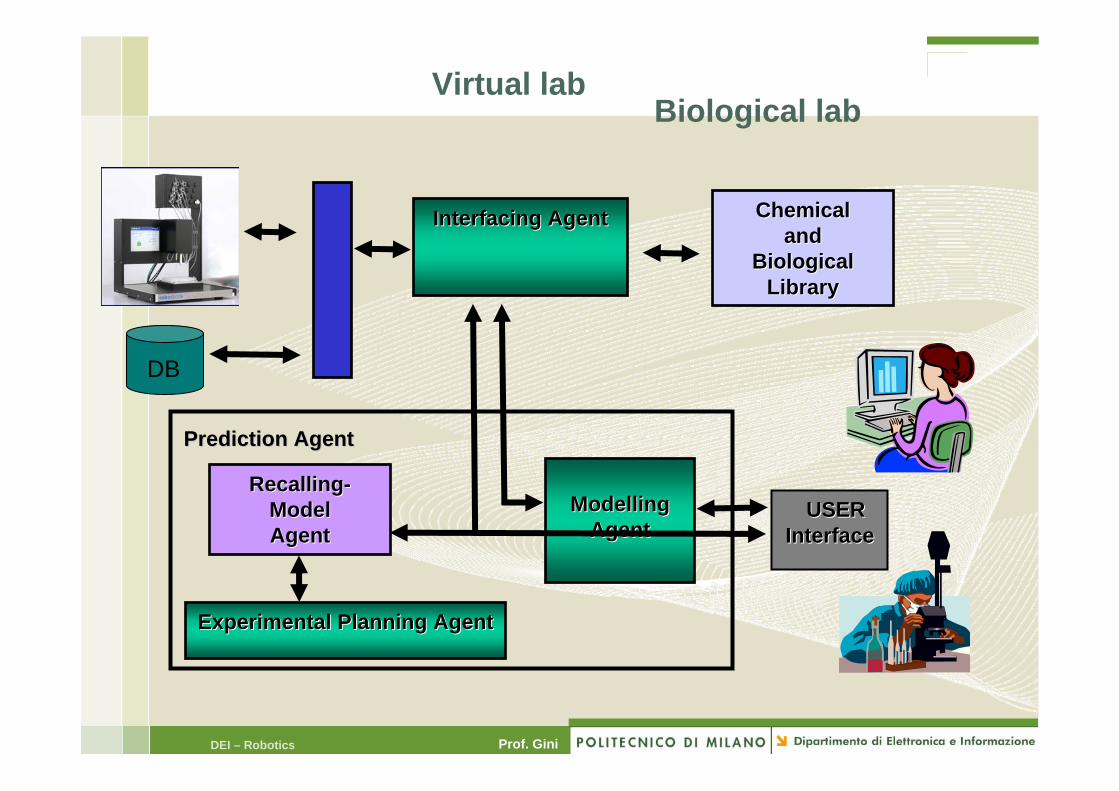
Virtual lab
ModellingModellingAgentAgent
RecallingRecalling--ModelModelAgentAgent
Experimental Planning AgentExperimental Planning Agent
Prediction AgentPrediction Agent
USERUSERInterfaceInterface
Interfacing AgentInterfacing Agent
Biological lab
ChemicalChemicalandand
BiologicalBiologicalLibraryLibrary
DB

Prof. GiniDEI – Robotics
30The target: biological modelling
Modelling the cellular interactions – the net of communications iscrucial
chemical cell tissue organ body
OPEN THE BOX

Prof. GiniDEI – Robotics
31Main tools used
OPEN SOURCE1. WEKA
(Waikato Environment for Knowledge Analysis) http://www.cs.waikato.ac.nz/~ml/weka
2. In house NN
Computational Chemistry tools1. CDK; 1. The Chemical Development Kit (CDK) is a Java-Library aiming at
providing all the basic classes and tools for chemical software under the GNU General Public License.
2. EPA tools

Prof. GiniDEI – Robotics
32In house development
1. Non parametric modelling: poliGMDHTheorem of Lorentz (1966) - any multivariate function can be
approximated to an arbitrary accuracy by a (particular) compositional network of univariate functions
2. Cascade-Correlation model: IReNNsThe structure of the network is defined during training.

Prof. GiniDEI – Robotics
33… but models are not theories
How models relate to theories?Actual models are neither derived entirely from data nor fromtheory.
1. We can use models when theory is not available2. Models are preliminary theories3. Models are a way to find out what are the causal relationships that
hold between certain facts and processes4. Causal reasoning is a powerful way of thinking
A theory of causality - J. PearlBeyond animal models
project: ORCHESTRAScientific communication--- teaching .

Prof. GiniDEI – Robotics
34Projects
DATA MINING FOR RULE INDUCTION
IReNNS: LEARNING FROM STRUCTURES
REC analysis in WEKA
HOW TO TEACH SCIENCE
CAUSAL REASONING

Prof. GiniDEI – Robotics
35Questions?
http://http://home.dei.polimi.ithome.dei.polimi.it//ginigini/Projects09.pdf/Projects09.pdf
![Gini Coefficient California pre-tax income, 2000, Gini=62.1%saez/course131/taxintro_ch17_new_attach.pdfFigure 1: Gini coefficient 6RXUFH .RSF]XN 6DH] 6RQJ4-( :DJHHDUQLQJVLQHTXDOLW\](https://img.pdfslide.net/doc/110x75/5f9d687763df8333422405c5/gini-coefficient-california-pre-tax-income-2000-gini621-saezcourse131taxintroch17newattachpdf.jpg)