Embed Size (px)
Citation preview

Equation Chapter 1 Section 1
Proyecto Fin de Carrera
Ingeniería Industrial
Simulación del Funcionamiento de una Turbina
Eólica con Generador de Inducción Doblemente
Alimentado
Autor: Antonio Calo García
Tutores: Manuel Burgos Payán
Juan Manuel Roldán Fernández
Dep. Ingeniería Eléctrica
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2015

ii

iii
Proyecto Fin de Carrera
Ingeniería Industrial
Simulación del Funcionamiento de una Turbina
Eólica con Generador de Inducción Doblemente
Alimentado
Autor:
Antonio Calo García
Tutores:
Manuel Burgos Payán
Profesor titular
Juan Manuel Roldán Fernández
Profesor sustituto interino
Dep. Ingeniería Eléctrica
Escuela Técnica Superior de Ingeniería
Universidad de Sevilla
Sevilla, 2015

iv

v
Proyecto Fin de Carrera: Simulación del Funcionamiento de una Turbina Eólica con Generador de Inducción
Doblemente Alimentado
Autor: Antonio Calo García Tutores: Manuel Burgos Payán
Juan Manuel Roldán Fernández
El tribunal nombrado para juzgar el Proyecto arriba indicado, compuesto por los siguientes miembros:
Presidente:
Vocales:
Secretario:
Acuerdan otorgarle la calificación de:
Sevilla, 2015
El Secretario del Tribunal

vi

vii
A mi familia, a mis compañeros de facultad y a mis maestros.

viii

ix


1
Tabla de contenido
1. Introducción ............................................................................................. 9
1.1. Introducción general ............................................................................................... 9
1.2. Objetivo del trabajo ................................................................................................. 9
1.3. Energía y generación eólica .................................................................................. 10
1.4. Impacto ambiental ................................................................................................. 15
1.4.1 Impactos sobre la fauna .............................................................................................. 15
1.4.2 Ocupación y degradación del terreno ................................................................................ 15
1.4.3 Impactos paisajístico .................................................................................................. 16
1.4.4 Ruido .......................................................................................................................... 16
2. El Aerogenerador .................................................................................. 18
2.1. Introducción .......................................................................................................... 18
2.1.1 Clasificación de las turbinas de viento según la orientación del eje del rotor ............ 18
2.1.2 Clasificación de las turbinas de viento según el tipo de máquina eléctrica utilizada y
su tecnología de control ...................................................................................................... 24
2.2. Rotor de la turbina ................................................................................................ 28
2.3. Sistema mecánico de transmisión ......................................................................... 32
3. Generador de inducción doblemente alimentado .............................. 37
3.1 Conceptos básicos .................................................................................................. 37
3.2 Operación subsíncrona y supersíncrona ................................................................. 41
3.3 Modelo y circuitos equivalentes del Generador de Inducción Doblemente
Alimentado (DFIG) ...................................................................................................... 46
3.4 Convertidores del lado de la red (GSC) y del lado del rotor (RSC) del DFIG ...... 54

2
3.4.1 Control del RSC ......................................................................................................... 55
3.4.2 Control del GSC ......................................................................................................... 58
4. Modelos multimasas .............................................................................. 60
4.1 Introducción ........................................................................................................... 60
4.2 Modelos de tres masas ........................................................................................... 60
4.3 Modelos de dos masas ........................................................................................... 64
4.4 Modelo concentrado de una masa .......................................................................... 66
4.5 Analogía electromecánica ...................................................................................... 68
5. Estabilidad transitoria .......................................................................... 75
5.1 Introducción ........................................................................................................... 75
5.2 Comprobación de la validez de las variantes presentadas de los modelos de dos
masas ............................................................................................................................ 77
5.3 Respuesta transitoria del sistema ante una variación en la velocidad del viento ... 81
5.3.1 Tensiones en bornes de la máquina eléctrica ............................................................. 83
5.3.2 Intensidades en bornes de la máquina eléctrica ......................................................... 84
5.3.3 Potencias activa y reactiva del aerogenerador ............................................................ 85
5.3.4 Velocidades del sistema ............................................................................................. 87
5.3.5 Pares del sistema ........................................................................................................ 88
5.3.6 Ángulo de Pitch .......................................................................................................... 88
5.4 Respuesta del sistema ante una perturbación límite en la velocidad del viento .... 89
5.4.1 Tensiones en bornes de la máquina eléctrica ............................................................. 90
5.4.2 Intensidades en bornes de la máquina eléctrica ......................................................... 91
5.4.3 Potencias activa y reactiva del aerogenerador ............................................................ 92
5.4.4 Velocidades del sistema ............................................................................................. 93
5.4.5 Pares del sistema ........................................................................................................ 95
5.4.6 Ángulo de Ptch ........................................................................................................... 95
5.4.7 Ángulo de retraso (lead-lag) de las palas respecto a su eje longitudinal .................... 96

3
5.5 Comportamiento del sistema ante una variación del viento en modo subsíncrono
...................................................................................................................................... 98
5.5.1 Velocidades del sistema ............................................................................................. 99
5.5.2 Intensidades de la máquina eléctrica .......................................................................... 99
5.5.3 Potencia activa del aerogenerador ............................................................................ 101
5.5.4 Pares del sistema ...................................................................................................... 102
5.5.5 Ángulo de Pitch ........................................................................................................ 103
5.6 Respuesta ante hueco de tensión de REE ............................................................ 104
5.6.1 Tensión de la Red ..................................................................................................... 107
5.6.2 Intensidades en bornes de la máquina eléctrica ....................................................... 107
5.6.3 Potencias Activa y Reactiva del aerogenerador ....................................................... 108
5.6.4 Velocidades del sistema ........................................................................................... 110
5.6.5 Pares del sistema ...................................................................................................... 111
5.6.6 Ángulo de Pitch ........................................................................................................ 112
5.7 Hueco de tensión límite. Velocidad y tiempo críticos de disparo ........................ 113
6. Conclusiones ........................................................................................ 127
6.1 Introducción ......................................................................................................... 127
6.2 Modelos multimasas y modelos concentrados .................................................... 127
6.3 Estabilidad transitoria .......................................................................................... 128
7. Referencias ........................................................................................... 130

4
Índice de Figuras
Figura 1.1 Capacidad de energía eólica instalada anualmente (arriba) y acumulada (abajo) entre los
años 1997-2014. .................................................................................................................................. 11
Figura 1.2 Top 10 de países con más capacidad de potencia eólica instalada en MW. ...................... 12
Figura 1.3 Cobertura de la demanda de energía eléctrica en España en 2014 (Fuente: REE, 2015). . 13
Figura 1.4 Aportación de potencia eólica a la demanda total 24-31 Agosto 2015 (Fuente: REE,
2015). .................................................................................................................................................. 14
Figura 1.5 Generación de eólica anual en España y tasa de variación de 2004- 2013 (Fuente: REE,
2015). .................................................................................................................................................. 14
Figura 2.1 Aerogeneradores de eje vertical de tipo Darrieus (izquierda) y de tipo Savonius helicoidal
(derecha). ............................................................................................................................................ 19
Figura 2.2 Parque eólico “offshore” en Thorntonbank, Mar del Norte, formado por turbinas eólicas
de eje horizontal. ................................................................................................................................. 20
Figura 2.3 Esquema de una turbina eólica de eje horizontal. .............................................................. 21
Figura 2.4 Turbina eólica de eje horizontal con rotor tipo hélice (monopala, bipala y tripala). ......... 22
Figura 2.5 Disposición del rotor de una turbina eólica de eje horizontal ............................................ 23
Figura 2.6 Comparativa del coeficiente de potencia de una turbina frente a la velocidad específica
para distintos tipos de aerogeneradores. ............................................................................................. 23
Figura 2.7 Disminución de la velocidad del viento tras atravesar la turbina eólica. ........................... 29
Figura 2.8 Coeficiente de potencia Cp frente al ratio de velocidades del viento después y antes de
atravesar la turbina. ............................................................................................................................. 30
Figura 2.9 Evolución del coeficiente de potencia (Cp) frente a la velocidad específica (lambda) para
distintos valores del ángulo de pitch (beta). ........................................................................................ 31
Figura 2.10 Sistema mecánico de transmisión de un aerogenerador con caja multiplicadora ............ 33
Figura 2.11 Generador síncrono acoplado directamente a la turbina (modelo Enercon E-44). .......... 33
Figura 2.12 Caja multiplicadora con ejes planetarios ......................................................................... 35
Figura 2.13 Eje de alta velocidad con disco de freno y zapatas .......................................................... 36
Figura 3.1 Modelo de una turbina eólica con un generador de inducción doblemente alimentado. ... 37
Figura 3.2 Circuito de protección de los devanados del rotor ante tensiones elevadas, también
llamado crowbar. ................................................................................................................................ 39
Figura 3.3 Detalle de los anillos rozantes y las escobillas en un DFIG. ............................................. 40
Figura 3.4 Esquema de flujos de potencia de un generador de inducción doblemente alimentado en
operación subsíncrona. ........................................................................................................................ 43
Figura 3.5 Esquema de conexión de un generador de inducción doblemente alimentado con flujos de
potencia para funcionamiento subsíncrono. ........................................................................................ 43
Figura 3.6 Esquema de flujos de potencia de un generador de inducción doblemente alimentado en
operación supersíncrona...................................................................................................................... 44
Figura 3.7 Esquema de conexión de un generador de inducción doblemente alimentado con flujos de
potencia para funcionamiento supersíncrono. ..................................................................................... 45
Figura 3.8 Diagramas de flujos de potencia para distintos casos de operación en torno a la velocidad
de sincronismo. ................................................................................................................................... 46
Figura 3.9 Esquema de los devanados de una máquina de inducción trifásica de rotor bobinado con 1
par de polos. ........................................................................................................................................ 47

5
Figura 3.10 Circuito equivalente trifásico de una máquina de inducción de rotor bobinado con un par
de polos. .............................................................................................................................................. 48
Figura 3.11 Transformación de circuitos rotatorios en ejes de referencia dq0. .................................. 50
Figura 3.12 Circuito equivalente de una máquina de inducción trifásica doblemente alimentada
representado en el eje q ....................................................................................................................... 52
Figura 3.13 Circuito equivalente de una máquina de inducción trifásica doblemente alimentada
representado en el eje d ....................................................................................................................... 52
Figura 3.14 Circuito equivalente de una máquina de inducción trifásica doblemente alimentada
representado en el eje 0 ....................................................................................................................... 53
Figura 3.15 Detalle del circuito de un convertidor formado por transistores IGBT con diodo .......... 55
Figura 3.16 Característica operacional y de seguimiento de la turbina eólica. ................................... 56
Figura 3.17 Esquema de control del convertidor RSC. ....................................................................... 57
Figura 3.18 Esquema de control del convertidor GSC. ...................................................................... 59
Figura 4.1 Descripción del sistema de transmisión mecánico de una turbina eólica como un modelo
de tres masas: Palas-Buje-Generador. ................................................................................................. 61
Figura 4.2 Descripción del sistema de transmisión mecánico de una turbina eólica como un modelo
de dos masas: Turbina-Generador. ..................................................................................................... 65
Figura 4.3 Descripción del sistema de transmisión mecánico de una turbina eólica como un modelo
de una sola masa, todo el sistema en su conjunto es un sólido rígido. ................................................ 67
Figura 4.4 Descripción del sistema mecánico mediante un circuito eléctrico análogo para un modelo
de 3 masas: Palas-Buje-Generador ..................................................................................................... 70
Figura 4.5 Descripción del sistema mecánico mediante un circuito eléctrico análogo para un modelo
de 2 masas: Turbina-Generador .......................................................................................................... 71
Figura 4.6 Descripción del sistema mecánico mediante un circuito eléctrico análogo para un modelo
de 1 masa ............................................................................................................................................ 71
Figura 4.7 Descripción del sistema mecánico mediante un circuito eléctrico análogo para el paso
desde un modelo de 3 masas a uno de 2 masas sin despreciar la rama de unión Palas-Buje en
detrimento de la inercia y el amortiguamiento del buje ...................................................................... 74
Figura 5.1 Sistema de tres masas Palas-Buje-Generador con sus entradas y salidas. ......................... 75
Figura 5.2 Característica de la curva de viento que corresponde a una de las entradas del sistema. .. 78
Figura 5.3 Comparación del par mecánico transmitido desde el buje al generador, THG (en p.u.), ante
ráfaga de viento de 20 m/s. ................................................................................................................. 79
Figura 5.4 Comparación de la velocidad del rotor del generador (en p.u.) ante ráfaga de viento de 20
m/ s. ..................................................................................................................................................... 80
Figura 5.5 Comparación de potencia activa (en MW) ante ráfaga de viento de 20 m/s. .................... 81
Figura 5.6 Característica de la velocidad del Viento (en m/s) que incide en las palas del
aerogenerador. ..................................................................................................................................... 82
Figura 5.7 Tensiones en bornes de la máquina eléctrica (en p.u.) ante ráfagas de viento de 20 m/s. . 83
Figura 5.8 Comparación de intensidades en bornes de la máquina eléctrica (en p.u.) ante ráfagas de
viento de 20 m/s. ................................................................................................................................. 84
Figura 5.9 Comparación de potencia activa (en MW) ante ráfagas de viento de 20 m/s. ................... 85
Figura 5.10 Comparación de potencia reactiva (en MVar) ante ráfagas de viento de 20 m/s. ............ 86
Figura 5.11 Comparación de velocidades (en p.u.) de las distintas masas modeladas en el sistema
ante ráfagas de viento de 20 m/s. ........................................................................................................ 87
Figura 5.12 Comparación de los diferentes pares que intervienen en el modelo de la turbina eólica
(en p.u.) ante ráfagas de viento de 20 m/s. .......................................................................................... 88

6
Figura 5.13 Comparación del ángulo de pitch (de paso) de las palas (en grados) ante ráfagas de
viento de 20 m/s. ................................................................................................................................. 89
Figura 5.14 Característica de la velocidad del Viento (en m/s) que incide en las palas del
aerogenerador. ..................................................................................................................................... 90
Figura 5.15 Tensiones en bornes de la máquina eléctrica (en p.u.) ante ráfagas de viento de 20 m/s 90
Figura 5.16 Comparación de intensidades en bornes de la máquina eléctrica (en p.u.) ante entrada
escalón de la velocidad del viento de hasta 30 m/s. ............................................................................ 91
Figura 5.17 Comparación de potencia activa (en MW) ante entrada escalón de la velocidad del
viento de hasta 30 m/s. ........................................................................................................................ 92
Figura 5.18 Comparación de potencia reactiva (en MVar) ante entrada escalón de la velocidad del
viento de hasta 30 m/s. ........................................................................................................................ 93
Figura 5.19 Comparación de las distintas velocidades del sistema (en p.u.) ante entrada escalón de la
velocidad del viento de hasta 30 m/s. ................................................................................................. 94
Figura 5.20 Comparación de los distintos pares del sistema (en p.u.) ante entrada escalón de la
velocidad del viento de hasta 30 m/s. ................................................................................................. 95
Figura 5.21 Comparación del ángulo de paso de las palas (en grados) ante entrada escalón de la
velocidad del viento de hasta 30 m/s. ................................................................................................. 96
Figura 5.22 Fuerzas actuantes sobre las palas del aerogenerador. ...................................................... 97
Figura 5.23 Ángulo ThetaBH (en rad) que forman las palas con su propio eje longitudinal debido al
rozamiento producido por la acción del viento. .................................................................................. 97
Figura 5.24 Característica de la velocidad del Viento (en m/s) que incide en las palas del
aerogenerador. ..................................................................................................................................... 98
Figura 5.25 Comparación de las velocidades del sistema (en p.u.) ante entrada escalón de la
velocidad del viento de 8 a 12 m/s. ..................................................................................................... 99
Figura 5.26 Comparación de intensidades en bornes de la máquina eléctrica (en p.u.) ante entrada
escalón de la velocidad del viento de 8 a 12 m/s. ............................................................................. 100
Figura 5.27 Intensidades del estátor y del rotor de la máquina eléctrica (en p.u.) para el modelo de 3
masas, ante entrada escalón de la velocidad del viento de 8 a 12 m/s. ............................................. 101
Figura 5.28 Comparación de potencia activa generada (en MW) ante entrada escalón de la velocidad
del viento de 8 a 12 m/s. ................................................................................................................... 102
Figura 5.29 Comparación de los pares del sistema (en p.u.) ante entrada escalón de la velocidad del
viento de 8 a 12 m/s. ......................................................................................................................... 103
Figura 5.30 Comparación de la variación del ángulo de pitch de las palas (en grados) ante entrada
escalón de la velocidad del viento de 8 a 12 m/s. ............................................................................. 104
Figura 5.31 Forma de onda de la tensión requerida por REE en el procedimiento de operación frente
a huecos de tensión de las instalaciones eólicas................................................................................ 105
Figura 5.32 Área de funcionamiento admisible durante los períodos de falta y de recuperación de
tensión, en función de la tensión en el punto de conexión a la red. .................................................. 106
Figura 5.33 Forma de onda de la tensión (en p.u.) utilizada para realizar la simulación del P.O. de
REE. .................................................................................................................................................. 107
Figura 5.34 Comparación de intensidades (en p.u.) ante hueco de tensión de REE. ........................ 108
Figura 5.35 Comparación de potencia activa (en MW) ante hueco de tensión de REE. ................... 108
Figura 5.36 Comparación de potencia reactiva (en MVar) ante hueco de tensión de REE. ............. 109
Figura 5.37 Control de potencia reactiva (en MVar) ante hueco de tensión de REE. ...................... 110
Figura 5.38 Comparación de velocidades de las distintas masas modeladas en el sistema (en p.u.)
ante hueco de tensión de REE. .......................................................................................................... 111

7
Figura 5.39 Comparación de los diferentes pares que intervienen en el modelo de la turbina eólica
(en p.u.) ante hueco de tensión de REE. ........................................................................................... 112
Figura 5.40 Comparación del ángulo de pitch de las palas del aerogenerador (en grados) ante hueco
de tensión de REE. ............................................................................................................................ 113
Figura 5.41 Esquema de una máquina de inducción doblemente alimentada conectada a la red
eléctrica. ............................................................................................................................................ 114
Figura 5.42 Circuito equivalente monofásico exacto de una máquina de inducción doblemente
alimentada en régimen permanente conectada a la red eléctrica. ..................................................... 115
Figura 5.43 Circuito equivalente Thevenin de una máquina de inducción doblemente alimentada
conectada a la red eléctrica. .............................................................................................................. 116
Figura 5.44 Balance de potencias de un DFIG en modo supersíncrono, asimilando cada término a un
flujo de potencia. ............................................................................................................................... 118
Figura 5.45 Balance de potencias de un DFIG en modo subsíncrono, asimilando cada término a un
flujo de potencia. ............................................................................................................................... 118
Figura 5.46 Circuito equivalente Thevenin, utilizando una impedancia equivalente para el RSC, de
una máquina de inducción doblemente alimentada conectada a la red eléctrica. ............................. 119
Figura 5.47 Variación del par electromagnético (par resistente) y del par mecánico (par motor)
producido por la turbina frente a la velocidad rotórica en una máquina asíncrona. .......................... 124

8

9
Capítulo 1
INTRODUCCIÓN
1.1 Introducción general
En la actualidad, las máquinas asíncronas o de inducción son empleadas en la inmensa
mayoría de los complejos industriales, y su uso como motor, representa una fracción sumamente
importante del consumo total de energía eléctrica mundial y se estima que los motores de inducción
son responsables más de la mitad del consumo de la industria. Sin embargo, en el ámbito de la
generación, las máquinas síncronas son las claras dominadoras. Éstas son mucho más eficaces y
dominan con claridad frente a las máquinas de inducción en la mayor parte de las instalaciones. No
obstante, en ciertos ámbitos, como puede ser por ejemplo, en los parques eólicos, las máquinas
asíncronas están tomando ventaja por una serie de razones de peso. En primer lugar, su mayor
robustez y menor coste hacen que la balanza se decante a su favor. Pero no sólo eso, sino que
también son preferibles debido a su buena adaptabilidad ante variaciones de carga, en condiciones
de viento muy desiguales. Mientras que el generador síncrono debe mantenerse siempre a una
velocidad constante (la de sincronismo de la red), el generador de inducción nos permite trabajar en
un rango de velocidades mucho más amplio en el que puede producir energía eléctrica.
Hay muchas tecnologías hoy en día en las instalaciones eólicas, usando diferentes tipos de
máquina, variando partes del tren mecánico, e incluso acoplando convertidores electrónicos a las
máquinas eléctricas que ayudan a controlar de una manera eficaz la velocidad de la turbina y la
potencia inyectada a la red. Veremos más adelante una clasificación con los principales tipos de
máquina eléctrica y las tecnologías utilizadas en cada uno de ellos.
1.2 Objetivo del trabajo
En este trabajo se expondrán todas y cada una de las partes de un aerogenerador o turbina
eólica, explicando detalladamente qué función tienen dentro del sistema en su conjunto, y trataremos
de clasificarlos, por ejemplo, según el tipo de máquina eléctrica utilizada o la orientación del rotor,
comparando y valorando las ventajas o inconvenientes de cada una de las diferentes clases.
El objetivo principal de este proyecto es estudiar el comportamiento de un aerogenerador ante
distintas perturbaciones, como pueden ser variaciones bruscas de la velocidad del viento o la respuesta
del sistema ante un hueco de tensión en la red de alimentación.
Para ello se utilizará un modelo dinámico reducido de 5º orden de la máquina asíncrona,
formado por 4 ecuaciones eléctricas y 1 ecuación de movimiento del rotor. La máquina que
utilizaremos estará alimentada tanto por el estátor como por el rotor, de ahí que reciba el nombre de
máquina de inducción doblemente alimentada, del inglés, Doubly Fed Induction Machine (DFIM). La
conexión por el estátor se realiza directamente a la red, mientras que el rotor se conecta a la red

10
mediante una pareja de convertidores PWM “back-to-back”, los cuales rigen las intensidades del
circuito rotórico, de tal forma que se pueda absorber o inyectar potencia al sistema eléctrico.
Será interesante modelar el sistema mecánico de transmisión de la turbina eólica como un
modelo multimasas, formado por distintos sólidos rígidos independientes, para el cual tendremos que
elegir con criterio las partes del aerogenerador que vamos a concentrar en una única masa, y, de esa
forma, poder analizar el comportamiento global del sistema de una forma simplificada, pero sin perder
información crucial. Partiremos de un modelo con 3 masas independientes, y se explicará cómo se ha
llegado hasta los distintos modelos concentrados, dando razones de cuáles pueden ser los más
adecuados, esto es, los que más se aproximen a la realidad, que en nuestro caso consideraremos como
el modelo de 3 masas.
Se tratará también de analizar y comparar los transitorios de los distintos modelos multimasas
de nuestro aerogenerador, siendo otro de los objetivos la comprobación de la estabilidad de nuestro
sistema ante perturbaciones que puedan aparecer en el sistema eléctrico, como es el caso de los huecos
de tensión. En este sentido, aplicaremos a nuestro sistema una falta trifásica equilibrada, con la forma
de tensión y el tiempo de duración requeridos por Red Eléctrica de España.
Por último, expondremos los circuitos equivalentes y las ecuaciones necesarias para hallar el
valor del tiempo crítico de disparo de las protecciones para que nuestro aerogenerador no se salga de
rango velocidades que garantizan su estabilidad. Para ello necesitaremos modelar nuestra máquina
eléctrica con un circuito equivalente que deberemos resolver para conocer magnitudes cruciales en
este aspecto, como puede ser el par electromagnético, y poder igualarlo como veremos, al par
mecánico introducido por la turbina.
1.3 Energía y generación eólica
La energía eólica es, sin duda, una de las fuentes de energía renovable más utilizadas junto
con la solar, que está teniendo un fuerte auge debido principalmente a la reducción de los costes y en
los avances tecnológicos en paneles solares.
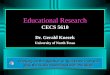
La capacidad de potencia eólica instalada en todo el mundo crece año tras año como vemos
en la Figura 1.1 [1]:

11
FIGURA 1.1 CAPACIDAD DE ENERGÍA EÓLICA INSTALADA ANUALMENTE (ARRIBA) Y ACUMULADA
(ABAJO) ENTRE LOS AÑOS 1997-2014.
Vemos como en el año 2013 se produjo una reducción de potencia anual instalada, para volver
a subir hasta un 30% en 2014 respecto al año anterior. En total, hay cerca de 370 GW de potencia
instalada a finales de 2014 en todo el mundo.
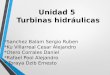
En la Figura 1.2 se aprecia como China es el país con más potencia eólica instalada, con más
de 114 GW, superando de largo los casi 66 GW de EE.UU., y muy por encima de Alemania, España
e India. El crecimiento de China ha tenido lugar de forma espectacular, especialmente, en los últimos
10 años.

12
FIGURA 1.2 TOP 10 DE PAÍSES CON MÁS CAPACIDAD DE POTENCIA EÓLICA INSTALADA EN MW.
España, que se encuentra en el 4º puesto de esta lista publicada por GWEC (Global Wind
Energy Council), posee casi 23 GW eólicos instalados, lo que representa un 6.2% del total de potencia
eólica instalada a nivel mundial, lo que muestra el gran compromiso con las fuentes renovables de
energía en este país. Lamentablemente, el viento es una fuente de energía muy variable, por lo que la
potencia real generada a lo largo del año será mucho menor que la total instalada. Al ratio entre la
energía generada en un parque eólico durante un período de tiempo, y la energía que hubiese generado
el parque funcionando a plena carga durante ese período, se le conoce con el nombre de factor de
carga, y no suele superar el 20% en los parques eólicos, por lo que esta tecnología no puede abastecer
con garantías una determinada demanda constante (base) y es utilizada normalmente para abastecer
picos de demanda en la red eléctrica.

13
A continuación, se muestra la cobertura de demanda de energía eléctrica en España durante
el año 2014, por parte de las distintas fuentes de energía:
FIGURA 1.3 COBERTURA DE LA DEMANDA DE ENERGÍA ELÉCTRICA EN ESPAÑA EN 2014 (FUENTE:
REE, 2015).
Vemos como la energía eólica ocupa un 20.3% del total de energía eléctrica generada durante
el año 2014 en España, cercana a la producción de energía nuclear (con un 22% del total), y
representando casi un 50% del total de energía renovable que se genera (la cual ya supone casi un 43%
del total de energía producida, y está comiendo terreno poco a poco a las fuentes no renovables).
Para mostrar la aportación a tiempo real de la energía eólica a la red español, en la Figura 1.4
se representa la curva de demanda (en amarillo) a lo largo de la última semana de agosto de 2015,
junto a la curva de potencia eólica generada a cada instante. Se observa como los valles de la demanda
suelen coincidir con los menores valores de generación eólica, y como la principal aportación coincide
con los picos de demanda del sistema, exceptuando algunos instantes en los que sea imposible
aprovechar la energía del viento, y se necesiten otro tipo de centrales para cubrir toda la demanda (día
25, a la izquierda de la Figura 1.4).

14
FIGURA 1.4 APORTACIÓN DE POTENCIA EÓLICA A LA DEMANDA TOTAL 24-31 AGOSTO 2015
(FUENTE: REE, 2015).
Por último, se muestra en la siguiente gráfica, proporcionada por Red Eléctrica de España y
obtenida de [2], la energía eólica generada en nuestro país, que también ha sufrido un incremento
continuo (del 10 al 30%), año tras año, desde 2004 hasta la actualidad, con excepción de 2011, año en
el que se produjo una pequeña disminución en la producción respecto a 2010.
FIGURA 1.5 GENERACIÓN DE EÓLICA ANUAL EN ESPAÑA Y TASA DE VARIACIÓN DE 2004- 2013
(FUENTE: REE, 2015).
Todas estas gráficas nos hacen ver la especial importancia de esta tecnología, de la que todavía
queda mucho que desarrollar y que, muy posiblemente, va a jugar un papel imprescindible en un futuro
no muy lejano para intentar satisfacer la demanda mundial que dejarán de cubrir los combustibles
fósiles.

15
1.4 Impacto ambiental
La energía eólica es claramente una de las más importantes y utilizadas dentro del grupo de
las energías renovables. Pertenece a este grupo, como también lo hacen la hidráulica o la solar, por no
contaminar el medioambiente emitiendo partículas nocivas a la atmósfera (centrales térmicas o de
carbón), o dejando residuos tóxicos con una vida media de cientos de años (elementos radiactivos
usados en las centrales nucleares).
Esta es la ventaja fundamental de las renovables respecto a la generación de energía mediante
combustibles fósiles o la energía nuclear, que favorecen el cambio climático tan comentado en las
últimas décadas, y que sigue poniendo en peligro gran parte del planeta.
Pero, sin embargo, centrándonos en la generación eólica, encontramos también ciertas
consecuencias negativas para la naturaleza que deberíamos tener en cuenta antes de la instalación de
un parque eólico. El rápido auge que tuvo este tipo de energía hace unos años propició, en muchas
ocasiones, la proliferación de parques eólicos sin una adecuada planificación y seguimiento de éstos.
Los impactos que se producen aparecen tanto en las fases de construcción de las instalaciones y el
tendido eléctrico como en las de explotación y desmantelamiento.
1.4.1 Impactos sobre la fauna.
Según un informe de Bird Life [3], los estudios existentes hasta la fecha demuestran que los
grupos faunísticos más afectados son las aves y los murciélagos, aunque hay que indicar que no se ha
estudiado en detalle el impacto en otros grupos. Los principales impactos se pueden resumir en:
Colisiones: Las colisiones se dan cuando las aves o murciélagos no consiguen esquivar las
aspas de los aerogeneradores o líneas eléctricas de evacuación, siendo causa de mortalidad
directa, así como de lesiones debido a la turbulencia que generan los rotores. Puesto que sus
efectos son más evidentes y medibles es uno de los motivos principales de preocupación a la
hora de considerar los riesgos de los parques eólicos.
Molestias y desplazamiento: Los aerogeneradores, el ruido, el electromagnetismo y las
vibraciones que provocan, así como el trasiego de personas o vehículos durante las obras
suponen unas molestias para la fauna que pueden llevar a que éstas eviten las zonas donde
están emplazadas, viéndose obligadas a desplazarse a otros hábitats. El problema surge
cuando estas áreas alternativas no tienen la suficiente extensión o se encuentran demasiado
lejos, en cuyo caso el éxito reproductivo y supervivencia de la especie puede llegar a
disminuir. Por otra parte, durante la fase de funcionamiento la apertura de pistas facilita el
acceso de personas y vehículos a zonas que antes permanecían inaccesibles. Se ha estimado

16
que para la instalación de un parque eólico en España se abren en promedio 10 km de pistas,
aumentando así la permeabilidad del territorio.
Efecto barrera: Los parques eólicos suponen una obstrucción al movimiento de las aves, ya
sea en las rutas de migración o entre las áreas que utilizan para la alimentación y descanso.
Este efecto barrera puede tener consecuencias fatales para el éxito reproductor y
supervivencia de la especie ya que las aves, al intentar esquivar los parques eólicos, sufren un
mayor gasto energético que puede llegar a debilitarlas.
Destrucción del hábitat: La ocupación de zonas de terreno por los parques eólicos supone que
dichas áreas ya no estén disponibles para las aves, o que sufran una degradación importante
en sus valores naturales y sistémicos.
1.4.2 Ocupación y degradación del terreno.
La obra civil necesaria para la implantación de un parque eólico supone un levantamiento y
movimiento de tierras, no sólo en el emplazamiento final de los aerogeneradores, sino en las zonas
colindantes, en las que frecuentemente se construyen subestaciones, tendidos eléctricos de evacuación,
vías de acceso para trasladar la maquinaria, etc. En caso de que se lleven a cabo desmontes y
aplanamientos también la geomorfología del terreno se verá afectada, pudiéndose acentuar el riesgo
de erosión. Además, el terreno se desbroza, eliminándose la cubierta vegetal existente en él.
1.4.3 Impacto paisajístico.
Éste es uno de los aspectos que más preocupa a la sociedad, puesto que la implantación de los
aerogeneradores no suele darse en zonas degradadas, industriales o las cercanas a núcleos
poblacionales, sino en áreas naturales de montaña, próximas a las líneas de cumbre, donde la fuerza
del viento se aprovecha mejor. El impacto visual que ello conlleva genera un gran rechazo social.
1.4.4 Ruido
Es producido por los componentes del aerogenerador, tanto mecánica como
aerodinámicamente.

17
Por tanto, puesto que el rápido crecimiento del número de parques eólicos que se sigue
previendo para el futuro supondrá una presión cada vez mayor sobre los espacios protegidos y la
biodiversidad, es importante asegurarse de que este desarrollo se dé de forma que se minimicen los
impactos negativos medioambientales. La Evaluación de Planes y Programas (EPP) y la Evaluación
de Impacto Ambiental (EIA) son las herramientas que deben proporcionar medios eficaces para
integrar factores ambientales en los procedimientos de planeamiento y toma de decisiones, de forma
que se reduzcan al mínimo las consecuencias negativas para el medio ambiente.

18
Capítulo 2
EL AEROGENERADOR
2.1 Introducción
Se conoce como aerogenerador al conjunto formado por un generador eléctrico conectado a
una turbina accionada por el viento (turbina eólica). La energía eólica, en realidad la energía cinética
del aire en movimiento, es capturada por un rotor hélice que la convierte en energía mecánica en el
eje y, a través de un sistema de transmisión mecánico, hace girar el rotor de un generador, normalmente
un alternador trifásico, que convierte la energía mecánica rotacional en energía eléctrica.
Un aerogenerador puede funcionar tanto de forma aislada como agrupados en parques eólicos,
estando separados unos de otros en función del impacto ambiental y de las turbulencias producidas
por el movimiento de las palas.
En la actualidad existen diferentes tipos de turbinas de viento, las cuales se podrían clasificar
en primer lugar por la orientación de su eje. A saber, se pueden encontrar turbinas de eje vertical o de
eje horizontal. Estas últimas son las más utilizadas, con rangos típicos desde los 300 kW llegando
incluso a alcanzar los 10 MW algunos modelos de última generación, como pueden ser el SeaTitan
10MW o el Sway ST10. Otra clasificación la podríamos hacer, como aparece en [4], en referencia al
tipo de máquina eléctrica y las diferentes tecnologías usadas, como veremos un poco más adelante.
2.1.1 Clasificación de las turbinas de viento según la orientación del eje del
rotor.
Dependiendo de la orientación del eje de la máquina las turbinas eólicas se pueden separar en
dos grandes tipos:
Aerogeneradores de eje vertical.
Son aquellos en los que el eje de rotación se encuentra perpendicular al suelo. También se
denominan VAWT (del inglés, Vertical Axis Wind Turbine), en contraposición a los de eje horizontal
o HAWT. Este tipo de aerogeneradores presentan una serie de ventajas respecto a los de eje horizontal,
como la posibilidad de situarlos unos más cerca de otros, debido a que no producen el efecto de frenado
de aire propio de los HAWT, por lo que un parque eólico no ocuparía tanta superficie. Además, no
necesitan un mecanismo de orientación, ya que sus palas son omnidireccionales. Se pueden colocar
más cerca del suelo, debido a que son capaces de funcionar con una menor velocidad del viento, por
lo que las tareas de mantenimiento son más sencillas. Son mucho más silenciosos que los de eje

19
horizontal, y mucho más recomendables para instalaciones pequeñas (menos de 10 kW) debido a la
facilidad de instalación, la disminución del ruido y el menor tamaño, lo que los hacen ideales para uso
particular en zonas aisladas y remotas donde existe dificultad para hacer llegar la red eléctrica.
FIGURA 2.1 AEROGENERADORES DE EJE VERTICAL DE TIPO DARRIEUS (IZQUIERDA) Y DE TIPO
SAVONIUS HELICOIDAL (DERECHA).
Como principales desventajas están la baja eficiencia y la menor estabilidad frente a los de
eje horizontal, así como problemas de fiabilidad, ya que las palas del rotor tienden a doblarse o
romperse con fuertes vientos. No son de arranque automático, sino que requieren conexión a la red
utilizando el generador como motor. Además, su menor altura les impide aprovechar las altas
velocidades del viento de las corrientes de aire a mayor altitud. En la Figura 2.1 podemos ver dos tipos
de aerogeneradores de eje vertical: Darrieus y Savonius (éste último con forma helicoidal).
Aerogeneradores de eje horizontal.
Son aquellos en los que el eje de rotación del equipo se encuentra paralelo al suelo. Esta es la
tecnología que se ha impuesto, por su eficiencia y confiabilidad y la capacidad de adaptarse a
diferentes potencias. En este trabajo nos centraremos en su totalidad en este tipo de turbinas, ya que
representan la inmensa mayoría de la energía eólica generada en la actualidad. Las turbinas eólicas se
pueden encontrar tanto en suelo firme, en zonas con un marcado régimen de viento, como en el mar,
a las que se les conoce con el término “Offshore”, del inglés literalmente, fuera de la costa.

20
FIGURA 2.2 PARQUE EÓLICO “OFFSHORE” EN THORNTONBANK, MAR DEL NORTE, FORMADO
POR TURBINAS EÓLICAS DE EJE HORIZONTAL.
Se puede resumir su conjunto de forma genérica, detallando sus principales componentes que
estudiaremos más a fondo de ahora en adelante:
- Rotor de la turbina: compuesto por las palas y el buje.
- Tren mecánico: formado, normalmente, por el freno mecánico, los ejes de baja y alta
velocidad y por la caja multiplicadora, en los casos que sea necesario.
- Generador eléctrico: que puede ser máquina asíncrona o síncrona como veremos más
adelante.
- Convertidores y unidades de control: formados por los circuitos de electrónica de potencia,
si los tuviera.
- Góndola: estructura que cubre todo el tren, el generador y los convertidores.
- Torre: estructura vertical sobre la que se sitúan todos los componentes anteriores.

21
FIGURA 2.3 ESQUEMA DE UNA TURBINA EÓLICA DE EJE HORIZONTAL.
Dentro de los aerogeneradores de eje horizontal, según el tipo de rotor nos podemos encontrar
con rotores multipala (turbinas lentas) o con rotores tipo hélice (turbinas rápidas). Los rotores tipo
hélice giran a una velocidad mayor que los rotores multipala. La velocidad lineal en la punta de la pala
de estas máquinas varía en un margen de 6 a 14 veces la velocidad del viento incidente en condiciones
de diseño. Esta propiedad hace que los aerogeneradores rápidos sean muy apropiadas para la
generación de energía eléctrica, ya que el elemento mecánico que acondiciona la velocidad de giro de
la turbina con la velocidad de giro del generador es menor en tamaño y coste. Los rotores tipo hélice
presentan un par de arranque reducido que, en la mayoría de las aplicaciones, es suficiente para hacer
girar el rotor durante el proceso de conexión.
Dentro de los rotores tipo hélice los más utilizados son los de tres palas, debido
fundamentalmente a su mejor estabilidad estructural y aerodinámica, menor emisión de ruido y mayor
rendimiento energético frente a los rotores de una o dos palas (ver Figura 2.4). La ventaja fundamental
de estos últimos, es que la velocidad de giro de diseño es superior y por lo tanto la relación de
multiplicación de la caja de transmisión es más reducida. Además, presentan como ventajas
adicionales: reducción en el coste de la instalación al emplear menor número de palas y una fácil
instalación; ya que pueden ser izados sin giros complicados tras su montaje en el suelo como pieza
única. Sin embargo, los problemas estructurales que presentan, sobre todo durante los periodos de
orientación, y los inconvenientes asociados a un control más complejo y a una mayor emisión de ruido
han llevado a que estos sistemas no hayan pasado prácticamente de la fase de prototipos [5].

22
FIGURA 2.4 TURBINA EÓLICA DE EJE HORIZONTAL CON ROTOR TIPO HÉLICE (MONOPALA,
BIPALA Y TRIPALA).
El coeficiente de potencia máximo se incrementa cuando aumenta el número de palas. El paso
de 1 a 2 palas supone un incremento del 10%, de 2 a 3 palas un 3 – 4% y de 3 a 4 sólo un 1%. Esto
explica la razón por la que no es rentable emplear aerogeneradores de 4 palas en vez de 3, ya que el
aumento de energía que se obtiene al incrementar esta última pala no justifica su empleo.
Otra clasificación adicional que se puede realizar con los aerogeneradores que utilizan rotores
tipo hélice es su disposición frente a la velocidad del viento incidente. Así, las turbinas pueden
diseñarse para que funcionen en la configuración de barlovento o sotavento. Las máquinas en posición
de barlovento necesitan un sistema de orientación activo ya que la velocidad del viento inicialmente
incide sobre el rotor eólico y posteriormente sobre la torre. Por el contrario, las máquinas orientadas a
sotavento utilizan un sistema de orientación pasivo que se basa en inclinar ligeramente las palas como
se indica en la Figura 2.5, de forma que en su movimiento de rotación describen un cono. Cuando el
rotor no está orientado, las palas que se encuentran más a favor del viento reciben un empuje
aerodinámico que tiende a variar la orientación del rotor hacia la posición de equilibrio.
A pesar de utilizar un sistema de orientación activo, la configuración a barlovento es la opción
elegida por la inmensa mayoría de los fabricantes debido a las elevadas cargas aerodinámicas que
aparecen sobre la máquina cuando la disposición es a sotavento. En esta configuración, cuando la pala
pasa por la zona de influencia de la torre no recibe viento y por lo tanto no transmite par aerodinámico,
lo que da lugar a fluctuaciones de potencia y fatiga en los materiales. Por otra parte, esta disposición
hace que durante la orientación se generen esfuerzos transitorios elevados ya que el proceso de giro
del rotor eólico no está controlado [5].

23
FIGURA 2.5 DISPOSICIÓN DEL ROTOR DE UNA TURBINA EÓLICA DE EJE HORIZONTAL
Para terminar la comparación entre los distintos tipos de aerogeneradores, mostramos en la
Figura 2.6 una gráfica comparativa donde se puede apreciar el coeficiente de potencia (Cp) frente a la
velocidad específica1 (λ) de todas las clases de turbinas eólicas vistas en este capítulo:
FIGURA 2.6 COMPARATIVA DEL COEFICIENTE DE POTENCIA DE UNA TURBINA FRENTE A LA
VELOCIDAD ESPECÍFICA PARA DISTINTOS TIPOS DE AEROGENERADORES.
1 Velocidad especifica del aerogenerador es el cociente entre la velocidad en la punta de las palas y la velocidad del viento delante del rotor.

24
En la Figura 2.6 se hace referencia a los límites de Glauert y de Betz. Este último nos indica
la máxima potencia que se puede extraer del viento independientemente del diseño de la turbina. De
acuerdo a la ley de Betz, ningún aerogenerador puede capturar más del 59.3% de la energía cinética
del viento. En la práctica, las turbinas utilizadas actualmente (hablamos especialmente de las turbinas
tripala) alcanzan picos de hasta el 75%-80% del límite de Betz como veremos más adelante.
2.1.2 Clasificación de las turbinas de viento según el tipo de máquina de
eléctrica utilizada y su tecnología de control.
Ahora nos basaremos concretamente en las turbinas de eje horizontal para estudiar más a
fondo los diferentes tipos de tecnologías utilizados en ellas. Una gran variedad de turbinas eólicas
están en uso actualmente. Estas tecnologías varían en coste, complejidad, eficiencia de extracción de
la energía eólica y equipamiento usado. Típicamente los aerogeneradores emplean un rotor formado
por las palas y buje que es el que se encarga de transmitir el par mecánico al eje de baja velocidad,
una caja multiplicadora para elevar la velocidad del eje desde la del rotor de la turbina hasta la
velocidad de funcionamiento del rotor del generador (el ratio de conversión de velocidad puede llegar
hasta 1:50), y un generador eléctrico que es el dispositivo encargado de la conversión electromecánica.
Sobre este último elemento podemos decir que las máquinas de inducción han ganado la partida a las
síncronas en este terreno, por la dificultad de mantener el generador a la velocidad de sincronismo
debido a la naturaleza variable de la velocidad del viento. Además pueden ser usados convertidores
electrónicos para regular magnitudes como la velocidad del rotor del generador y así controlar las
potencias activa y reactiva entregadas a la red. Según [1], las turbinas de viento se pueden clasificar
en cuatro tipos básicos:
Turbinas eólicas de velocidad fija, usando un generador de jaula de ardilla.
Turbinas eólicas con deslizamiento variable, mediante variación de la resistencia rotórica.
Es necesario una máquina de rotor bobinado, para poder acceder al mismo eléctricamente.
Turbinas eólicas con generadores de inducción doblemente alimentadas, o en inglés:
Doubly-Fed Induction Generator (DFIG). Por supuesto, también es necesario una máquina
de rotor bobinado.
Turbinas eólicas “Full Converter”, que pueden estar compuestas de una máquina de
inducción o una máquina síncrona.
a) Turbinas eólicas de velocidad fija.
La turbina de velocidad fija es la más básica de los 4 tipos. Actúa con una muy pequeña
variación en la velocidad del rotor de la turbina y emplea una máquina de inducción de jaula de ardilla

25
directamente conectada a la red, mientras su rotor se encuentra cortocircuitado. En este tipo de
aerogeneradores se suelen utilizar arrancadores suaves para la sincronización y conexión a la red,
quedando directamente conectados en régimen permanente. Aunque económica y robusta, sus
desventajas son suficientes para decidir no elegirla. Entre ellas están la necesidad de compensar
potencia reactiva y el bajo aprovechamiento de la energía del viento, debido a su funcionamiento
óptimo únicamente cuando opera en torno a su velocidad nominal, lo que conlleva importantes
pérdidas económicas. La necesidad de consumir reactiva para su magnetización, tanto en vacío como
a plena carga, hace necesario la utilización de bancos de condensadores. Esta situación empeora en
presencia de un hueco de tensión producto de una falta. En estos casos, la máquina consume más
reactiva mientras la generación reactiva por parte del banco de condensadores disminuye con el
cuadrado de la tensión, es decir, genera menos reactiva cuando más se necesita, poniendo en peligro
la estabilidad de tensión del sistema. Además, en estas máquinas la calidad de onda de tensión
entregada a la red es bastante baja debido a la gran variación de la velocidad del viento y que repercute
directamente en la del rotor del generador, y, por consiguiente, en fluctuaciones de potencia. En redes
débiles, estas variaciones en la inyección de potencia pueden provocar fuertes fluctuaciones de tensión
en el punto de conexión.
En este tipo de sistemas la potencia se regula mediante sistemas mecánicos como el ángulo
de pala o la pérdida aerodinámica, bien sea activa o pasiva. En ocasiones se pueden emplear
generadores con dos devanados, cada uno con diferente número de pares de polos para poder trabajar
a dos velocidades. Uno de los devanados con mayor número de polos, trabaja a menor velocidad de
sincronismo y se emplea para bajas potencias, y el otro, de menor número de pares de polos y, por
tanto, de mayor velocidad de sincronismo para potencias mayores.
b) Turbinas eólicas con deslizamiento variable
Las turbinas de velocidad variable, sin embargo, están diseñadas para poder trabajar en un
rango bastante amplio de velocidades del rotor. Éstas normalmente pueden variar el ángulo de pitch,
y controlar la velocidad y potencia de la turbina para, de esta forma, aprovechar mucho mejor la
energía proveniente de un régimen de viento dado, y entregándola a la red con mucha mejor calidad
(sin transmitir las fluctuaciones producidas por la variabilidad del viento) respecto a las anteriores de
velocidad fija.
En este caso concreto, las turbinas de deslizamiento variable (VS) o las de resistencia rotórica
dinámica (DRR) controlan la resistencia del circuito rotórico, lo que permite un amplio rango de
variación del deslizamiento (velocidad) de hasta el 10%. Sin embargo, uno de los inconvenientes de
este tipo de tecnología es el calor que se desprende de la resistencia rotórica, lo que se traduce en una
disminución de potencia entregada por la turbina. Este diseño emplea generadores asíncronos de rotor
bobinado para poder modificar las resistencias en el circuito rotórico, y cuyo estátor se conecta

26
directamente a la red como en el caso anterior. La conexión a la red se realiza de forma suave mediante
el uso de un arrancador.
c) Turbinas eólicas con generadores de inducción doblemente alimentadas
En este tipo de generadores el estátor está conectado directamente a la red como en el caso de
la máquina asíncrona de jaula de ardilla, con la diferencia que se utiliza un convertidor AC-DC-AC,
también llamado “back-to-back converter”, que conecta el rotor del generador con la red. Así están
formadas las turbinas con generador de inducción doblemente alimentado (DFIG). El control de las
corrientes del rotor permite desacoplar las potencias activa y reactiva, así como maximizar la potencia
extraída del viento y minimizar las tensiones mecánicas del sistema. Las prestaciones están limitadas
por el dimensionamiento que se haga del convertidor, pudiendo entregarse potencia a la red a través
de este, y permitiendo que incluso se genere una potencia superior a la nominal de la máquina en
funcionamiento supersíncrono.
El tamaño requerido para el convertidor en esta configuración la hace muy atractiva
económicamente. Su principal desventaja es el uso de escobillas y la necesidad de protección adicional
en caso de faltas en la red. Un hueco de tensión en la red produce un incremento de corriente en los
devanados del estator, y, debido al acoplamiento magnético entre estator y rotor, esta corriente también
fluirá por el rotor y el equipo de potencia pudiendo llegar a destruirlo. Por esta razón, son incapaces
de hacer frente directamente a los huecos de tensión. Ello obliga a disponer de equipamiento
suplementario como el denominado “crowbar activo”, como veremos más adelante.
Los fundamentos teóricos de este generador deben ser explicados para comprender
exactamente el funcionamiento del mismo, y analizar cuáles son sus ventajas e inconvenientes.
En una máquina asíncrona cuyo estátor está conectado a la red trifásica de frecuencia fs, su
campo magnético girará a una velocidad proporcional a esa frecuencia, (𝜔𝑠 =2𝜋𝑓𝑠
𝑝). Si además se
alimenta el rotor con un sistema trifásico de tensiones de frecuencia fr, el rotor también creará un
campo magnético que girará a una velocidad distinta a la del estátor, (𝜔𝑟 =2𝜋𝑓𝑟
𝑝), suponiendo que
(𝑓𝑠 ≠ 𝑓𝑟). Si el rotor de la máquina está girando a una velocidad ω, también llamada ωm por ser la
velocidad mecánica del eje, la velocidad del campo rotórico respecto a un observador fijo será 𝜔 +
𝜔𝑟. Para que una máquina desarrolle un par con un valor medio distinto de cero se precisa que los
campos magnéticos de estátor y de rotor giren a idéntica velocidad [6], es decir:
𝜔𝑠 = 𝜔 +𝜔𝑟
Definiendo el deslizamiento de la máquina como la diferencia relativa entre la velocidad del
campo magnético del estátor (velocidad de sincronismo) y la velocidad del rotor:

27
𝑠 =𝜔𝑠 −𝜔
𝜔𝑠=𝜔𝑟𝜔𝑠
Podemos expresar la velocidad mecánica del rotor en función del deslizamiento, la frecuencia
de la red y el número de par de polos:
𝜔 =2𝜋𝑓
𝑝(1 − 𝑠)
La velocidad del rotor ω puede ser mayor o menor a ωs, dependiendo de si la máquina se
encuentra en estado supersíncrono o subsíncrono, respectivamente. En caso de que se encuentre por
encima de la velocidad de sincronismo (𝜔𝑠 < 𝜔 ⇒ 𝑠 < 0) la velocidad del campo magnético rotórico
debe ser negativa (𝜔𝑟 < 0), y en el caso de que (𝜔𝑠 > 𝜔 ⇒ 𝑠 > 0), la velocidad del campo rotórico
deberá ser positiva ( 𝜔𝑟 > 0). Teniendo en cuenta que el sentido de giro del campo magnético creado
por un devanado depende de la secuencia de fases aplicada al devanado, si se desea que la máquina
funcione en estado supersíncrono se debe aplicar al rotor un sistema trifásico de secuencia inversa
respecto a la del estátor. Si, por el contrario, queremos que la máquina opere en estado subsíncrono se
debe alimentar el rotor con un sistema trifásico de la misma secuencia que la tensión aplicada al estátor.
Veremos más adelante que jugando con la tensión, intensidad y la frecuencia del devanado rotórico
podemos llegar a controlar la velocidad del rotor dependiendo de lo que nos interese en cada momento.
El DFIG puede generar una tensión de valor eficaz y frecuencia constante aunque su eje esté
girando a velocidad variable a causa de las variaciones en la velocidad del viento, gracias a que el
rotor de la máquina está alimentado por el convertidor “back-to-back”. El convertidor del lado del
rotor del generador regula la amplitud, la frecuencia y fase de la tensión aplicada al circuito rotórico,
lo que permite realizar un control sobre la máquina para regular el par electromagnético y el factor de
potencia del generador en un amplio rango de velocidades de giro (±30% de la velocidad de
sincronismo). De forma semejante, el convertidor del lado de la red hace que sea posible realizar la
regulación independiente de la potencia activa y reactiva, lo que permite extraer e inyectar potencia
activa en el rotor de la máquina y controlar la potencia reactiva intercambiada entre este convertidor
y la red.
d) Turbinas eólicas “Full Converter”
En las turbinas “full converter” el convertidor “back-to-back” es el único camino de flujo de
potencia desde la turbina a la red y por tanto no hay conexión directa a la misma. Esto repercute en la
potencia nominal necesaria para el convertidor, que tendrá que ser como mínimo igual que la potencia
aparente nominal del generador, aumentando en gran medida su precio. Estas turbinas utilizan
generadores síncronos o de inducción y ofrecen control independiente de potencia activa y reactiva.
Esta configuración permite el control de la velocidad en todo su rango. Los diseños que incluyen una

28
máquina de imanes permanentes presentan la ventaja de eliminar el sistema de excitación e incluso la
caja multiplicadora cuando se construye en configuración multipolar, aunque a cambio su coste es
muy elevado.
La tecnología que utilizaremos en este trabajo es la correspondiente al tercer tipo, formada
por un generador de inducción doblemente alimentado. Esta máquina es una de las más utilizadas
actualmente en los sistemas de generación eólica, gracias a gran cantidad de ventajas ya comentadas
y en las que seguiremos profundizando en capítulos posteriores. Además de la máquina eléctrica,
desmenuzaremos a continuación los principales componentes del aerogenerador, a saber, el rotor de
la turbina eólica formado por las palas y el buje, y todos los componentes del tren de transmisión
mecánico.
2.2 Rotor de la turbina
Esta parte del aerogenerador está compuesta por el buje y las palas, elementos aerodinámico
que recibe directamente la energía cinética del viento y la transforma en energía mecánica en forma
de un par que llamaremos Tw (procedente de Wind, viento en inglés), y que, pasando por el buje, se
irá transmitiendo por todo el tren mecánico de la turbina eólica.
Como hemos comentado anteriormente en la clasificación de las turbinas, el rotor
normalmente se encuentra situado a barlovento, ya que esta disposición disminuye enormemente las
cargas que incurren en fatiga del material, al reducir el llamado efecto de sombra de torre, y evita el
ruido aerodinámico producido por las palas cuando el rotor se sitúa a sotavento. Por tanto, nuestro
aerogenerador se encontrará a barlovento, además de que será un rotor tipo hélice y que dispondrá de
3 palas, por las ventajas explicadas anteriormente.
Considerando que a través del rotor la energía del viento es transformada en energía mecánica
que mueve el eje principal de la turbina de viento, tenemos que esta transformación puede ser descrita
por la relación entre la potencia total en el viento y potencia mecánica en la turbina eólica. Esto se
contempla comenzando por el viento entrante en el rotor por el área de las palas. Se puede demostrar
que la potencia cinética de un cilindro de radio R viajando con una velocidad de viento vwind
corresponde a la potencia total del viento Peólica dentro del área del rotor de una turbina eólica. Esta
potencia del viento total puede ser expresada por:
𝑃𝑒ó𝑙𝑖𝑐𝑎 =1
2𝜌𝑎𝑖𝑟𝑒𝜋𝑅
2𝑣𝑤𝑖𝑛𝑑3

29
Donde ρaire es la densidad del aire que consideramos constante e igual a 1.225 kg/m3, R es el
radio del rotor de la turbina y vwind es la velocidad del viento.
Sin embargo, no es posible extraer toda la energía cinética del viento Peólica, ya que una gran
cantidad de aire permanecerá detrás de la turbina de viento, lo cual no permitirá que el aire fluya y se
disperse a través de la turbina. Ésta solamente es capaz de extraer una fracción de la energía del viento,
y a este ratio se le conoce como coeficiente de potencia Cp. La potencia mecánica que pueden extraer
las palas, a la que llamaremos Pw es, por tanto:
𝑃𝑤 = 𝐶𝑝𝑃𝑒ó𝑙𝑖𝑐𝑎 =1
2𝜌𝑎𝑖𝑟𝑒𝜋𝑅
2𝐶𝑝𝑣𝑤𝑖𝑛𝑑3
Como habíamos comentado ya anteriormente, el límite teórico del coeficiente de potencia Cp,
también conocido como límite de Betz (ver Figura 2.8) es: (𝐶𝑝 =16
27≈ 0.593). Esto quiere decir que,
teóricamente, es posible extraer tan sólo el 59.3% de la energía cinética del viento, como se explica
en [5], [7], [8] y muchas otras publicaciones, y esto se debe a que la velocidad del viento, vwind,
disminuye hasta vwind/3 al pasar por la turbina eólica [9], como se puede apreciar en la Figura 2.7.
FIGURA 2.7 DISMINUCIÓN DE LA VELOCIDAD DEL VIENTO TRAS ATRAVESAR LA TURBINA EÓLICA.

30
FIGURA 2.8 COEFICIENTE DE POTENCIA CP FRENTE AL RATIO DE VELOCIDADES DEL VIENTO
DESPUÉS Y ANTES DE ATRAVESAR LA TURBINA.
Las turbinas modernas de 3 palas, como la que vamos a utilizar en nuestro estudio, tienen un
valor óptimo de Cp en el rango de 0.52-0.55. Con estos conocimientos ya nos podemos hacer una idea
de la influencia que tendrán estos parámetros en el par introducido por el viento y que transmite a las
palas de la turbina, Tw. Éste se puede relacionar mediante la potencia Pw y la velocidad angular de las
palas (ωb, del inglés blades), según la expresión:
𝑇𝑤 =𝑃𝑤𝜔𝑏
Desde el punto de vista físico la potencia Pw, por tanto, va a depender de distintos parámetros,
cuestión que debe ser cuidadosamente analizada para el correcto funcionamiento del aerogenerador:
𝑃𝑤 = 𝑓(𝜔𝑏, 𝑣𝑤𝑖𝑛𝑑 , 𝛽)
Donde β es el ángulo de paso (Pitch) de las palas. Por otro lado, Cp va a depender de dos
parámetros:
𝐶𝑝 = 𝑓(𝜆, 𝛽)
Este parámetro es sumamente importante en las turbinas eólicas, con la ventaja de que
depende de la velocidad específica λ (𝜆 =𝜔𝑏𝑅
𝑉𝑤𝑖𝑛𝑑), la cual es una magnitud adimensional, con lo que
nos podemos hacer una idea bastante cercana del funcionamiento (eficiencia) de un aerogenerador sin
importar las características de este (Potencia nominal, tamaño,…), además de poder compararlos unos
con otros sin problema. Su relación es no lineal tal como muestra la siguiente ecuación:
𝐶𝑝(𝜆, 𝛽) = 0.73(155
𝜆𝑖− 0.58𝛽 − 0.002𝛽2.14 − 13.2) 𝑒
18.4𝜆𝑖

31
Donde:
𝜆𝑖 = (1
𝜆 − 0.02−−0.003
𝛽3 + 1)−1
Además se muestra gráficamente su comportamiento ante distintos valores de λ y β en la
Figura 2.9, para la turbina que vamos a estudiar, de 1.5 MW de potencia y 82 m de diámetro de rotor:
FIGURA 2.9 EVOLUCIÓN DEL COEFICIENTE DE POTENCIA (CP) FRENTE A LA VELOCIDAD
ESPECÍFICA (LAMBDA) PARA DISTINTOS VALORES DEL ÁNGULO DE PITCH (BETA).
Como se puede observar en la Figura 2.9, el valor óptimo de λ se da para un valor 𝛽 = 0,
como es lógico, para que las palas estén óptimamente orientadas a la dirección del viento incidente y
así aprovechar la máxima energía eólica posible, y se corresponde con el máximo valor de Cp
(aproximadamente 0.5), con lo que la eficiencia de la turbina eólica respecto al límite de Betz es de un
85%. Las palas están diseñadas de tal forma que el valor óptimo de λ y, por consiguiente, de Cp se dé
a una velocidad de 11 m/s.
El otro de los componentes del rotor de la turbina es el buje, elemento de unión entre las palas
y el eje de rotación. Se pueden clasificar, según [5], en dos tipos:

32
Buje rígido: en este tipo de sistemas la pala se atornilla al buje y ésta se fija rígidamente al
eje de giro. Las palas se comportan con respecto al sistema de giro como una viga en voladizo
que transmite todas las cargas que recibe directamente al tren de potencia. Este tipo de bujes
se emplea en máquinas de tres palas donde el rotor está dinámicamente más equilibrado.
Buje basculante: para reducir las cargas que se producen en los bujes rígidos una opción es
utilizar bujes basculantes. Estos bujes están conectados al tren de potencia a través de un
apoyo que les permite pivotar libremente. Esta pieza permite pequeños movimientos (ángulos
menores a un ± 10 %) en dirección perpendicular al rotor con respecto al plano de rotación.
La frecuencia de este movimiento es proporcional a la velocidad de giro del aerogenerador
(un ciclo por revolución). Este tipo de bujes se emplea con frecuencia en rotores de dos palas,
ya que el efecto pivote hace que se equilibren las cargas aerodinámicas en cada vuelta.
Los aerogeneradores de gran potencia cuentan con un mecanismo de cambio del ángulo de
paso (Pitch) de las palas mediante un servomotor que las gira respecto a su propio eje, para, de esa
forma, controlar el par de arranque y de frenado, así como limitar la potencia cuando la turbina
funciona a plena carga, desaprovechando energía eólica y así evitando que la turbina siga
incrementando su velocidad descontroladamente. Este sistema se puede aplicar independientemente a
cada pala o de forma conjunta. La ventaja que presentan los sistemas individuales es la redundancia
que supone disponer de tres frenos aerodinámicos en caso de que sea necesario realizar una parada de
emergencia.
2.3 Sistema mecánico de transmisión.
Formado por el eje de baja velocidad, la caja multiplicadora y el eje de alta velocidad, el tren
mecánico sirve de unión entre el rotor de la turbina eólica (palas y buje) y el rotor del generador.
Algunas referencias incluyen en el tren mecánico al buje como parte de él, considerando que también
actúa directamente en la transmisión del par y el movimiento.

33
FIGURA 2.10 SISTEMA MECÁNICO DE TRANSMISIÓN DE UN AEROGENERADOR CON CAJA
MULTIPLICADORA
Existen diferentes tipos de disposiciones, en las que el generador puede llegar incluso a estar
acoplado directamente con el rotor de la turbina (Figura 2.11). Para ello se utilizan generadores
síncronos de excitación independiente con un alto número de pares de polos, gobernados por un
convertidor electrónico que permite desacoplar la frecuencia de funcionamiento del generador con la
frecuencia de la red. Esto permite al generador girar a la misma velocidad que la turbina, con lo que
podemos deshacernos de la caja multiplicadora. Las desventajas principales son, sin embargo, su
elevado peso, su diseño poco convencional y, sobre todo, la necesidad de una alta fiabilidad en la
electrónica de potencia, además de una gama de potencias muy alta, ya que todo el flujo de potencia
va a pasar a través de los convertidores electrónicos. Los primeros diseños comerciales basados en
este conceptos son del fabricante alemán Enercon con sus modelos E-33, E-44, E53, E70 y E82 [10].
FIGURA 2.11 GENERADOR SÍNCRONO ACOPLADO DIRECTAMENTE A LA TURBINA (MODELO
ENERCON E-44).
La caja multiplicadora une los dos ejes, el de baja velocidad (unido al buje) con el de alta
(unido al rotor del generador). Aparece como una opción de diseño más que habitual, ya desde las

34
primeras turbinas eólicas construidas. Su función es adaptar la velocidad de giro de la turbina a la del
generador, y ésta es su razón de ser. Si no fuera estrictamente necesaria en la gran mayoría de los
modelos de turbinas eólicas, se prescindiría de ella como es lógico, ahorrándonos las considerables
pérdidas en forma de calor producidas por el rozamiento en los engranajes. Sin embargo, son mayores
las ventajas que nos aporta el uso de la tecnología de los DFIG que los inconvenientes, contando como
uno de ellos el uso de este elemento multiplicador de velocidad.
Como hemos dicho, la caja multiplicadora transmite el par mecánico del eje de baja velocidad
al de alta, elevando la velocidad en un valor que viene dado por su relación de multiplicación (1:n),
cociente entre la velocidad del generador (giro rápido) y la velocidad del rotor de la turbina (giro
lento). Cuanto menor sea este relación, menor será el tamaño de la caja y por lo tanto su coste. Las
dos únicas formas de reducir la relación de transmisión son disminuir la velocidad del generador y
aumentar la velocidad de la turbina. En primer lugar, para un generador conectado directamente a una
red de frecuencia constante, por ejemplo 60 Hz, su velocidad de sincronismo depende exclusivamente
del número de pares de polos. Así, si decidimos no incluir una caja multiplicadora en nuestra turbina
eólica, adaptando la velocidad del generador a la del rotor de la turbina, necesitaríamos una máquina
eléctrica con un número excesivo de polos, lo que dificultaría demasiado las labores estructurales y de
montaje del aerogenerador, además de una tecnología de convertidores electrónicos que consiga que
soporten con fiabilidad las altas potencias a las que serán sometidos. Por otra parte, la velocidad de
giro de la turbina depende en gran medida del diseño aerodinámico de las palas. Los rotores eólicos
actuales se diseñan con una velocidad lineal en la punta de las palas en torno a 80 m/s. Considerando
este parámetro constante, se concluye de inmediato en que cuanto mayor sea el diámetro de la turbina,
mayor será la velocidad de giro del rotor eólico. Esta forma de reducir la relación de transmisión
implica aumentar los esfuerzos centrífugos y lleva asociado un aumento de cargas aerodinámicas sobre
la estructura de la máquina.
A pesar de todo esto, la necesidad de reducir la relación de multiplicación no se percibe, en
general, como un problema crítico de diseño, ya que actualmente es posible encontrar cajas de elevada
potencia y relación de transmisión (1:100) con rendimientos y fiabilidad muy altos durante todo su
período de funcionamiento.
Los engranajes de las cajas multiplicadoras pueden ser de dos tipos: rectos o helicoidales [10].
Los primeros se utilizan en cajas de ejes paralelos, y, aunque sean más económicos, están siendo
desplazados por los segundos. Los engranajes helicoidales tienen un diseño más sofisticado que los
rectos, y se emplean en cajas multiplicadores de tipo planetario (Figura 2.12), en las que la relación
de transmisión en cada etapa es bastante más alta. Las necesidades de transmisión de las turbinas
actuales requieren el empleo de, al menos, 2 ó 3 etapas de multiplicación para alcanzar las altas
velocidades a las que gira el rotor del generador.

35
En general, las cajas multiplicadoras de ejes paralelos son más sencillas de diseñar y por lo
tanto más baratas que lo diseños planetarios. Sin embargo, ante igualdad en la relación de transmisión
y en la potencia transferida, los diseños con ejes planetarios son mucho más robustos y menos pesados,
y cuentan con una mayor eficiencia, además de otorgar mayor fiabilidad al elemento conjunto y
facilidad de ensamblaje con el resto del tren de potencia durante el período de montaje.
FIGURA 2.12 CAJA MULTIPLICADORA CON EJES PLANETARIOS
Por último, estaría bien incluir aquí al freno mecánico, que suele ir situado en el eje de alta
velocidad, y su función principal es mantener bloqueado el eje de giro durante las operaciones de
puesta en marcha y mantenimiento del aerogenerador. Cuando el freno se diseña única y
exclusivamente para bloquear el rotor, el par que debe soportar, es el transmitido por el rotor eólico
puesto en bandera en condiciones de viento extremo y con el eje de giro bloqueado. Pero además, en
algunos diseños se puede emplear el freno mecánico para contribuir al frenado dinámico del rotor
eólico durante procesos de parada de emergencia, ayudando así al freno aerodinámico que incorporan
la mayoría de turbinas de una cierta potencia. La función de parada aerodinámica se puede realizar, o
bien actuando sobre el control de ángulo de Pitch girando la pala un ángulo cercano a los 90˚, o bien
activando los aerofrenos en el caso de que el control aerodinámico de la turbina sea pasivo. El empleo
del freno mecánico en este tipo de ocasiones sólo está justificado en turbinas de reducida potencia.

36
Para máquinas del orden del MW de potencia el freno mecánico sólo se utiliza para funciones de
bloqueo ya que un diseño de éste durante procesos de parada dinámica supondría unas dimensiones
del disco de frenado, excesivamente grandes, e implicaría grandes desgastes junto con una fuerte
disipación de calor. La constitución física de este componente consiste en un disco que gira solidario
al eje de transmisión y unas zapatas de frenado (Figura 2.13) que rozan con el disco cuando se activan
ya sea por vía eléctrica, hidráulica o neumática.
FIGURA 2.13 EJE DE ALTA VELOCIDAD CON DISCO DE FRENO Y ZAPATAS
Uno de los aspectos más relevantes en el diseño del freno mecánico es su ubicación en el tren
de transmisión. Este componente puede colocarse tanto en el eje de baja velocidad con en el eje de
alta. Esta última opción suele ser la más utilizada por el siguiente motivo, al ser mayor la velocidad
del eje del generador, su par será menor, y, por tanto, también lo será el diámetro necesario para el
disco de freno. Sin embargo, como desventaja se encuentra el hecho de que no se garantiza el bloqueo
del rotor eólico en caso de que se desacople, por accidente, del tren de potencia el eje de baja velocidad
o el cuerpo lento de la caja multiplicadora. Por otra parte, en el caso de bloque del rotor los dientes de
la caja multiplicadora estarían sometidos a esfuerzos producidos por la variabilidad del viento, aun
cuando el giro se impide desde el eje de alta velocidad. La solución a estos inconvenientes seria colocar
el freno mecánico en el eje de baja velocidad, lo cual se aplica en muchos casos en turbinas de poca
potencia. Sin embargo, como hemos dicho anteriormente, para máquinas de elevada potencia
implicaría un tamaño del disco de freno excesivamente grande, lo que descarta este diseño.
Más adelante retomaremos este tema en profundidad señalando las características elásticas y
las pérdidas de algunos de los elementos sobre los que hemos tratado en este apartado para proceder
al modelado mecánico del sistema.

37
Capítulo 3
GENERADOR DE INDUCCIÓN
DOBLEMENTE ALIMENTADO
3.1 Conceptos Básicos
En este apartado nos pararemos a comentar los aspectos fundamentales de la máquina que
vamos a utilizar en nuestro estudio, un generador de inducción doblemente alimentado, profundizando
en el funcionamiento propio de la máquina eléctrica, así como en el de los convertidores electrónicos
que, como veremos, juegan un papel fundamental en el correcto funcionamiento del aerogenerador.
A una máquina eléctrica se le llama generador cuando ésta convierte una potencia mecánica
de entrada en potencia eléctrica a la salida. Cuando las máquinas de inducción operan a velocidades
mayores a sus velocidades de sincronismo, están actuando como generadores. Los generadores de
inducción doblemente alimentados (en adelante DFIGs) operan con los mismos principios que un
generador de inducción convencional con rotor bobinado (wound rotor, en inglés), con el añadido de
que tienen circuitos de electrónica de potencia conectados al devanado rotórico para optimizar el
funcionamiento de la turbina eólica. Estos circuitos ayudan a extraer y regular la potencia mecánica
procedente de la fuente de viento disponible en cada instante de una manera mucho más optimizada
respecto a los simples generadores de inducción con jaula de ardilla. El esquema genérico de un
aerogenerador que contiene a este tipo de máquina se muestra en la Figura 3.1.
FIGURA 3.1 MODELO DE UNA TURBINA EÓLICA CON UN GENERADOR DE INDUCCIÓN
DOBLEMENTE ALIMENTADO.

38
Con el desarrollo producido en la tecnología de las turbinas de viento, éstas se han ido
incrementando en diámetro, con áreas de barrido cada vez más grandes, consiguiendo unos mayores
valores de potencia entregada. Esto implica que, debido a la mayor longitud de las palas, éstas deban
girar a menores velocidades para evitar superar los límites de ruido que produce su giro. Por lo tanto,
las palas y el buje, ambos deben estar unidos al rotor del generador (eje de alta velocidad) mediante
una caja multiplicadora que eleve la velocidad angular del rotor de la turbina (baja velocidad) hasta
valores de funcionamiento del generador.
En este tipo de turbinas la máquina de inducción utilizada es una de rotor bobinado para poder
acceder eléctricamente al mismo y así conectarlo al convertidor AC-DC-AC. Se utilizan normalmente
anillos rozantes y escobillas para poder acceder al circuito rotórico, aunque también existen diseños
sin escobillas pero que suelen tener problemas de eficiencia, coste y tamaño. Las tres fases del
devanado estatórico son alimentadas directamente desde una fuente de tensión trifásica, la cual suele
estar por debajo de 1 kV y a la frecuencia del sistema (50 ó 60 Hz). Un convertidor electrónico “back-
to-back”, formado por un rectificador y un inversor, es usado para rectificar la tensión de alimentación
a corriente continua y transformarla de nuevo en corriente alterna a la frecuencia deseada para la
excitación del rotor.
El convertidor de potencia está conectado al devanado rotórico para controlar la potencia que
circula por él y, de esa forma, tratar de reducir sus pérdidas al máximo. De esa forma, los devanados
del estátor y del rotor están independientemente excitados. Estos últimos tienen 2 ó 3 veces el número
de espiras que en el estátor, lo que significa que la tensión del rotor va a ser más alta y las corrientes
en éste serán menores, lo que implica un menor coste del convertidor. Además, debido a que las
corrientes en el rotor pueden ser controladas, tanto el estátor como el rotor son capaces de importar y
exportar potencia activa y reactiva, lo cual tiene consecuencias sumamente importantes, como
veremos a continuación, ante un posible hueco de tensión en la red, ya que permite a la máquina ayudar
a esta última a sobreponerse a la falta y mejorar su estabilidad. Por otro lado, el control de tensiones e
intensidades rotóricas permite que la máquina de inducción permanezca sincronizada con la red
mientras la velocidad del aerogenerador varía. Gracias al DFIG se aprovecha el viento disponible de
una manera mucho más eficiente que con una turbina eólica de velocidad fija, especialmente durante
condiciones de viento muy suave, con las que este último tipo de turbinas seguramente no podría
seguir en funcionamiento produciendo electricidad. También es apropiado añadir que el coste del
convertidor es bastante bajo si lo comparamos con otras tecnologías de turbinas eólicas de velocidad
variable, porque sólo una fracción de la potencia generada (25 - 30%) es alimentada a la red a través
del convertidor, siendo el resto entregada directamente por el estátor. La eficiencia del DFIG es
notablemente alta por esta misma razón [4].
La desventaja de esta máquina es que intentar tenerla controlada cuando se sale del rango de
velocidades operacionales es imposible debido a las altas tensiones del rotor. Asimismo, los
transitorios debidos a perturbaciones en la red (huecos de tensión trifásicos o bifásicos) serán mucho

39
más notables. Con el objetivo de prevenir que altas tensiones en el rotor y sus correspondientes
intensidades destruyan los IGBTs que forman el convertidor, se utiliza un circuito de protección
también conocido como “crowbar” [11]. Éste cortocircuitará los devanados del rotor usando una
resistencia de valor muy pequeño cuando sean detectadas tensiones o corrientes excesivas. Para que
sea posible continuar operando tan pronto sea posible, se debe utilizar un crowbar activo, de manera
que pueda eliminar el corto en el rotor de forma controlada y así el convertidor del lado del rotor pueda
iniciarse de nuevo, tan sólo después de unas decenas de milisegundos desde que se produjo el hueco
de tensión, cuando la tensión restante permanece por encima del 15% de la tensión nominal. De esta
forma, es posible aportar potencia reactiva a la red durante el resto del tiempo que dure el hueco de
tensión, y, por consiguiente, ayudar a la red a recuperarse de la falta. A este fenómeno de
autorecuperación en los aerogeneradores ante fallos en la red producidos por huecos de tensión, se le
conoce con el nombre de “Low Voltage Ride Through”.
FIGURA 3.2 CIRCUITO DE PROTECCIÓN DE LOS DEVANADOS DEL ROTOR ANTE TENSIONES
ELEVADAS, TAMBIÉN LLAMADO CROWBAR.
Se emplea un sistema de control de las potencias activa y reactiva, mediante regulación de la
corriente por el devanado rotórico, para, de ese modo, ajustar las potencias activa y reactiva que se
inyectan a la red por el estátor, independientemente de la velocidad de giro del generador. El método
de control utilizado suele ser un control vectorial o control de campo orientado, aunque también puede
ser usado un control directo de par (en inglés: Direct Torque Control, DTC). El control vectorial
permite desacoplar totalmente el control de potencia activa y reactiva, de manera que podamos
modificar una de las dos sin afectar para nada a la otra. Respecto al control directo de par, DTC, se ha
podido probar que tiene una mejor estabilidad cuando el generador requiere grandes corrientes
reactivas [4].
Aunque las turbinas con DFIG son generalmente más complejas y caras que las que contienen un
generador de jaula de ardilla o incluso que las de control por resistencia rotórica, presentan ciertas
ventajas que nos hacen decantarnos por ellas:
Es posible un control independiente de las potencias activa y reactiva.
Mejora la calidad de la potencia entregada a la red. Es más estable, sin grandes fluctuaciones.

40
Disponemos de un incremento del rango de velocidades en el eje del generador (alta
velocidad) de hasta un ±30% de la velocidad de sincronismo para la cual la generación puede
tener lugar con mínimas pérdidas en el devanado rotórico (también conocidas en inglés con
el nombre de slip losses).
Se maximiza la extracción de energía eólica (se minimizan las pérdidas aerodinámicas).
Mejora de la actuación ante la aparición de una falta.
Pueden ser controladas para reducir el estrés mecánico.
Además, los DFIGs también tienen algunas ventajas frente a los generadores “full-converter”, ya
que estos tienen el convertidor “back-to-back” conectado al estátor, lo que significa que deben de tener
la misma potencia nominal que la máquina eléctrica, ya que todo el flujo de potencia atravesará el
convertidor, y todo esto implica un aumento considerable en inversión respecto a un DFIG.
Otro tipo de DFIG es el conocido como “Brushless Doubly Fed Induction Generator”, que está
formado por dos devanados trifásicos adyacentes en el estátor, los cuales disponen de un número
diferente de pares de polos. Debido a esta diferencia, se produce un fenómeno de inducción magnética
de baja frecuencia por encima del rango de velocidades. Uno de los devanados estatóricos (devanado
de potencia) está conectado directamente a la red, mientras que el otro (devanado de control) es
alimentado a través de un variador de frecuencia. La velocidad del eje es ajustada variando la
frecuencia del devanado de control. Como toda máquina doblemente alimentada, la potencia nominal
del convertidor necesitará ser, tan sólo, una fracción no muy alta de la potencia nominal de la máquina.
Además presenta la clara ventaja de no llevar escobillas, lo que reduce la necesidad de mantenimiento
por el desgaste que se produce en las mismas.
FIGURA 3.3 DETALLE DE LOS ANILLOS ROZANTES Y LAS ESCOBILLAS EN UN DFIG.

41
Por otro lado, el generador de inducción doblemente alimentado sin escobillas no es del todo
eficiente y el conjunto de los dos devanados estatóricos es físicamente más largo que en otras máquinas
eléctricas de potencia similar. Además, se necesita un diseño especial del rotor que intente focalizar
la mayor parte del campo magnético mutuo hacia una ruta indirecta que atraviese el entrehierro y fluya
a través del rotor para que se produzca un acoplamiento inductivo entre los dos devanados adyacentes.
Como consecuencia, éstos están independientemente excitados y participan activamente en el proceso
de conversión de energía electromecánica, como ocurre en el resto de máquinas eléctricas doblemente
excitadas. Dependiendo del tipo de diseño del rotor la máquina puede ser de inducción o de reluctancia
conmutada. El rango de velocidades será siempre menor que 1800 r.p.m. a 60 Hz y 1500 r.p.m. a 50
Hz, porque el número de pares de polos efectivo es igual a la media del número de pares de polos
(distintos) de los dos devanados del estátor. Este tipo de máquinas incorporan un pobre diseño
electromagnético que compromete el tamaño, coste y eficiencia eléctrica del generador por querer
evitar un conjunto formado por escobillas y anillos rozantes.
3.2 Operación subsíncrona y supersíncrona
Volviendo al estudio de la máquina de inducción doblemente alimentada con anillos rozantes,
como la que se utilizará en este trabajo, es interesante comentar que el comportamiento
electrodinámico de ésta a la frecuencia fundamental está dominado por el convertidor. Éste es el que
determina los valores deseados de las potencias activa y reactiva. El comportamiento eléctrico del
generador y del convertidor en los DFIGs es en gran parte como el de una fuente de tensión con
intensidad regulada, por lo que podría ser simplificado en el modelado del sistema [4].
De acuerdo con el principio de las máquinas eléctricas rotatorias respecto a las frecuencias
angulares de los campos magnéticos entre los devanados del rotor y estátor, se debe satisfacer la
siguiente ecuación:
𝜔𝑠 = 𝜔𝑚 +𝜔𝑟
Donde 𝜔𝑚 corresponde a la velocidad mecánica del rotor, 𝜔𝑠 =2𝜋𝑓
𝑝 a la velocidad de sincronismo
o velocidad del campo magnético del estátor, y 𝜔𝑟 =2𝜋𝑓𝑟
𝑝 a la velocidad del campo magnético rotórico
(respecto al propio rotor).
Como habíamos dicho en apartados anteriores, podemos expresar la velocidad del rotor de la
máquina según la expresión:
𝜔𝑚 =2𝜋(𝑓 − 𝑓𝑟)
𝑝

42
Esta ecuación muestra que es posible controlar la velocidad de giro del rotor del generador,
variando la frecuencia de la corriente que alimenta sus devanados, trabajo que realiza el convertidor.
Como el deslizamiento viene dado por:
𝑠 =𝜔𝑠 −𝜔𝑚𝜔𝑠
=𝜔𝑟𝜔𝑠=𝑓𝑟𝑓
⇒ 𝑓𝑟 = 𝑠 · 𝑓
La velocidad mecánica puede expresarse por la siguiente ecuación:
𝜔𝑚 =2𝜋𝑓
𝑝(1 − 𝑠)
Un punto muy importante e interesante sobre este diseño del DFIG es que puede funcionar como
generador en distintos puntos de operación. Cabe recordar que la máquina asíncrona (por ejemplo de
jaula de ardilla, sin conexión en el rotor) funciona como motor o generador dependiendo de si la
velocidad del rotor es inferior o superior a la velocidad del campo magnético del estátor,
respectivamente. Si la velocidad del rotor supera a la de sincronismo, la polaridad de las tensiones
inducidas en el rotor cambia y el sentido de la fuerza y, por consiguiente, del par resultante, es opuesto
a la dirección del movimiento. Sin embargo, en el generador de inducción doblemente alimentado
podemos diferenciar dos zonas de operación, tanto si trabaja a una velocidad superior como inferior a
la de sincronismo, como detallamos a continuación, [12].
Al variar las velocidades del rotor se pueden controlar las potencias transferidas al estátor y a la
red, los cuales operan de manera distinta dependiendo de su magnitud respecto a la velocidad de
sincronismo.
El generador opera a velocidad subsíncrona cuando la velocidad mecánica, ωm, también llamada
ω, del rotor es inferior a la velocidad de sincronismo, ωs, o también ω1 en algunos artículos. En este
caso, el deslizamiento es positivo y el estator recibe potencia eléctrica Ps debido a la potencia mecánica
del eje del rotor Pm y a la potencia activa transferida desde la red por medio del rotor Pr, como se
muestra en la Figura 3.4

43
FIGURA 3.4 ESQUEMA DE FLUJOS DE POTENCIA DE UN GENERADOR DE INDUCCIÓN DOBLEMENTE
ALIMENTADO EN OPERACIÓN SUBSÍNCRONA.
El balance de potencias en este modo de operación sería:
𝑃𝑚 =∑𝑃é𝑟𝑑𝑖𝑑𝑎𝑠 + 𝑃𝑠 − 𝑃𝑟
FIGURA 3.5 ESQUEMA DE CONEXIÓN DE UN GENERADOR DE INDUCCIÓN DOBLEMENTE
ALIMENTADO CON FLUJOS DE POTENCIA PARA FUNCIONAMIENTO SUBSÍNCRONO.
Donde Pgc es la potencia del convertidor del lado de la red (GSC). Como podemos observar
en la Figura 3.5, la potencia entregada a la red, Pg, será igual a:

44
𝑃𝑔 = 𝑃𝑠 − 𝑃𝑔𝑐
Y si despreciamos las pérdidas de la turbina y la máquina eléctrica, y de los convertidores,
nos queda que la potencia entregada a la red es igual a la potencia mecánica generada:
𝑃𝑔 = 𝑃𝑠 − 𝑃𝑟 = 𝑃𝑚
Por otra parte, el generador opera a velocidad supersíncrona cuando la velocidad mecánica
del rotor supera a la velocidad de sincronismo. Entonces el deslizamiento, s, es negativo y la potencia
mecánica del rotor es entregada como potencia activa a la red, tanto a través del estátor como del
devanado rotórico de la máquina, como podemos observar en la Figura 3.6
FIGURA 3.6 ESQUEMA DE FLUJOS DE POTENCIA DE UN GENERADOR DE INDUCCIÓN DOBLEMENTE
ALIMENTADO EN OPERACIÓN SUPERSÍNCRONA.
Podemos escribir, por tanto, este balance de potencias como:
𝑃𝑚 =∑𝑃é𝑟𝑑𝑖𝑑𝑎𝑠 + 𝑃𝑠 + 𝑃𝑟
Siendo 𝑃𝑚 = 𝑇𝑚 𝜔𝑚 y 𝑃𝑠 = 𝑇𝑒𝑚 𝜔𝑠.
Si despreciamos las pérdidas, la ecuación mecánica que rige el comportamiento del generador
(teniendo en cuenta este modo de funcionamiento, generación, para las ecuaciones) será:
𝐽𝑑𝜔𝑚𝑑𝑡
= 𝑇𝑚 − 𝑇𝑒𝑚
En régimen permanente para una velocidad dada: 𝑇𝑚 = 𝑇𝑒𝑚 y 𝑃𝑚 = 𝑃𝑠 + 𝑃𝑟 . Con lo que,
aproximadamente, nos queda:

45
𝑃𝑟 = 𝑃𝑚 − 𝑃𝑠 = 𝑇𝑚 𝜔𝑚 − 𝑇𝑒𝑚 𝜔𝑠 = −𝑇𝑒𝑚 (𝜔𝑠 −𝜔𝑚)𝜔𝑠𝜔𝑠= −𝑠𝜔𝑠𝑇𝑒𝑚 = −𝑠𝑃𝑠
En este modo de funcionamiento, como la velocidad de la máquina es mayor que la de
sincronismo de la red, el deslizamiento será negativo y, por tanto, Pr será positivo al igual que Ps, lo
que indica que se inyecta potencia activa a la red también por los devanados rotóricos, como habíamos
declarado en el balance de potencias. Generalmente, el valor absoluto del deslizamiento es mucho
menor que 1 y, consecuentemente, Pr es sólo una pequeña fracción de Ps.
FIGURA 3.7 ESQUEMA DE CONEXIÓN DE UN GENERADOR DE INDUCCIÓN DOBLEMENTE
ALIMENTADO CON FLUJOS DE POTENCIA PARA FUNCIONAMIENTO SUPERSÍNCRONO.
Es importante comentar que, en ambos modos de operación, la potencia entregada a la red,
Pg, si despreciamos las pérdidas del sistema, es igual a la potencia mecánica Pm [13].
Se muestra el siguiente cuadro (Figura 3.8) como tabla resumen de los distintos casos de
operación según la velocidad angular del rotor respecto a la velocidad de sincronismo de la máquina
eléctrica. Nótese que en el tercer caso estaríamos hablando de una máquina síncrona (por funcionar
con velocidad igual a 𝜔𝑠).

46
FIGURA 3.8 DIAGRAMAS DE FLUJOS DE POTENCIA PARA DISTINTOS CASOS DE OPERACIÓN EN
TORNO A LA VELOCIDAD DE SINCRONISMO.
3.3 Modelo y circuitos equivalentes del Generador de
Inducción Doblemente Alimentado (DFIG)
Para aplicar el control vectorial, es necesario comprender el comportamiento de la máquina de
inducción con rotor bobinado. Se explicará a continuación la disposición del devanado, su circuito
equivalente y el principio de operación de este tipo de máquinas, junto con las ecuaciones teóricas en
las que se basa. Las ecuaciones muestran que en los ejes de referencia abc, algunos parámetros de la
máquina, tales como la inductancia, varían con el tiempo. Para evitar esto, el circuito equivalente en
los ejes abc se transforma mediante la transformada de Park en unos ejes equivalentes rotantes qd0, y
así conseguimos hacer invariantes a parámetros del generador tales como la inductancia. El eje q y el
eje d están desfasados 90⁰, y pueden ser usados para controlar la potencia activa y reactiva,
respectivamente, mediante la intensidad en cada uno de ellos, de forma independiente. Además, sigue
siendo válida la simplificación de representar el convertidor electrónico y el generador de inducción
como una fuerte de intensidad regulable.

47
Vamos a realizar la siguiente explicación utilizando los devanados de una máquina de inducción
trifásica de rotor bobinado con 1 par de polos, para mayor simplicidad, [4]. Estos se muestran en la
Figura 3.9:
FIGURA 3.9 ESQUEMA DE LOS DEVANADOS DE UNA MÁQUINA DE INDUCCIÓN TRIFÁSICA DE
ROTOR BOBINADO CON 1 PAR DE POLOS.
Donde el ángulo θr representa el adelanto de las fases del rotor con respecto a las fases
correspondientes del estátor (en la Figura 3.9, desfase entre el eje de la fase a del rotor, ar, y el eje de
la fase a del estátor, as), y ωr en este caso es la velocidad eléctrica del rotor (𝜔𝑟 = 𝜔𝑚 · 𝑝), siendo 𝜔𝑚
la velocidad mecánica del rotor, y 𝑝 el número de pares de polos del generador.

48
FIGURA 3.10 CIRCUITO EQUIVALENTE TRIFÁSICO DE UNA MÁQUINA DE INDUCCIÓN DE ROTOR
BOBINADO CON UN PAR DE POLOS.
Donde aparecen representadas las tensiones y las intensidades de cada fase, así como las
resistencias e inductancias representadas por el número de espiras del bobinado. Las relaciones entre
tensiones, corrientes y los flujos concatenados para cada fase de esta máquina pueden ser escritos
según los ejes abc como se muestra a continuación.
Ecuaciones de las tensiones del estátor (ejes abc):
𝑢𝑎𝑠 = 𝑟𝑠𝑖𝑎𝑠 +𝑑𝜆𝑎𝑠𝑑𝑡
𝑢𝑏𝑠 = 𝑟𝑠𝑖𝑏𝑠 +𝑑𝜆𝑏𝑠𝑑𝑡
𝑢𝑐𝑠 = 𝑟𝑠𝑖𝑐𝑠 +𝑑𝜆𝑐𝑠𝑑𝑡
Ecuaciones de las tensiones del rotor, referidas al lado del estátor (ejes abc):
𝑢𝑎𝑟′ = 𝑟𝑟
′𝑖𝑎𝑟′ +
𝑑𝜆𝑎𝑟′
𝑑𝑡
𝑢𝑏𝑟′ = 𝑟𝑟
′𝑖𝑏𝑟′ +
𝑑𝜆𝑏𝑟′
𝑑𝑡
𝑢𝑐𝑟′ = 𝑟𝑟
′𝑖𝑐𝑟′ +
𝑑𝜆𝑐𝑟′
𝑑𝑡

49
Donde λ denota el flujo concatenado, los subíndices s y r indican variables y parámetros
asociados al estátor y al rotor, respectivamente, y el apóstrofe indica las variables y parámetros
referidos al lado del estátor.
Reescribiendo las ecuaciones de las tensiones anteriores en forma matricial:
𝑢𝑎𝑏𝑐𝑠 = 𝑟𝑠 𝑖𝑎𝑏𝑐𝑠 +𝑑𝜆𝑎𝑏𝑐𝑠𝑑𝑡
𝑢𝑎𝑏𝑐𝑟′ = 𝑟𝑟′ 𝑖𝑎𝑏𝑐𝑟
′ +𝑑𝜆𝑎𝑏𝑐𝑟′
𝑑𝑡
Los flujos concatenados vienen dados por las siguientes ecuaciones:
𝜆𝑎𝑏𝑐𝑠 = 𝐿𝑠 𝑖𝑎𝑏𝑐𝑠 + 𝐿𝑠𝑟′ 𝑖𝑎𝑏𝑐𝑟
′
𝜆𝑎𝑏𝑐𝑟′ = 𝐿𝑠𝑟′𝑇 𝑖𝑎𝑏𝑐𝑠 + 𝐿𝑟′ 𝑖𝑎𝑏𝑐𝑟
′
Donde las inductancias de los devanados son expresadas en forma matricial como:
𝐿𝑠 =
(
𝐿𝑙𝑠 + 𝐿𝑚𝑠 −
1
2𝐿𝑚𝑠 −
1
2𝐿𝑚𝑠
−1
2𝐿𝑚𝑠 𝐿𝑙𝑠 + 𝐿𝑚𝑠 −
1
2𝐿𝑚𝑠
−1
2𝐿𝑚𝑠 −
1
2𝐿𝑚𝑠 𝐿𝑙𝑠 + 𝐿𝑚𝑠)
𝐿𝑟′ =
(
𝐿𝑙𝑟′ + 𝐿𝑚𝑠 −
1
2𝐿𝑚𝑠 −
1
2𝐿𝑚𝑠
−1
2𝐿𝑚𝑠 𝐿𝑙𝑟
′ + 𝐿𝑚𝑠 −1
2𝐿𝑚𝑠
−1
2𝐿𝑚𝑠 −
1
2𝐿𝑚𝑠 𝐿𝑙𝑟
′ + 𝐿𝑚𝑠)
𝐿𝑠𝑟′ = 𝐿𝑚𝑠
(
cos𝜃𝑟 cos(𝜃𝑟 + 120˚) cos(𝜃𝑟 − 120˚)
cos(𝜃𝑟 − 120˚) cos𝜃𝑟 cos(𝜃𝑟 + 120˚)
cos(𝜃𝑟 + 120˚) cos(𝜃𝑟 − 120˚) cos𝜃𝑟 )

50
En estas ecuaciones los parámetros 𝐿𝑙𝑠 y 𝐿𝑙𝑟′ corresponden a las inductancias de dispersión
del estátor y del rotor, respectivamente, estando esta última referida al estátor, y Lms corresponde a la
inductancia de magnetización del estátor. Combinando las ecuaciones de las tensiones y los flujos
magnéticos inductivos, obtenemos:
𝑢𝑎𝑏𝑐𝑠 = 𝑟𝑠 𝑖𝑎𝑏𝑐𝑠 +𝑑(𝐿𝑠 𝑖𝑎𝑏𝑐𝑠)
𝑑𝑡+𝑑 (𝐿𝑠𝑟′ 𝑖𝑎𝑏𝑐𝑟
′ )
𝑑𝑡
𝑢𝑎𝑏𝑐𝑟′ =
𝑑 (𝐿𝑠𝑟′𝑇 𝑖𝑎𝑏𝑐𝑠)
𝑑𝑡+ 𝑟𝑟′ 𝑖𝑎𝑏𝑐𝑟
′ +𝑑 (𝐿𝑟′ 𝑖𝑎𝑏𝑐𝑟
′ )
𝑑𝑡
Las inductancias, tensiones e intensidades en estas ecuaciones están representadas sobre los
ejes abc, y son, por tanto, variables en el tiempo. Esto las hace muy engorrosas para trabajar en un
análisis y modelado, por lo que suelen ser transformadas mediante la transformada de Park para que,
de esa forma, queden representadas sobre unos ejes rotantes qd0 Figura 3.11.
FIGURA 3.11 TRANSFORMACIÓN DE CIRCUITOS ROTATORIOS EN EJES DE REFERENCIA DQ0.
Donde θ, θr, y ω, ωr son los desfases y sus derivadas frente al tiempo de los ejes de referencia
y del rotor, respectivamente.
Así, las ecuaciones anteriores nos quedarían de la siguiente forma:

51
𝑢𝑞𝑑0𝑠 = 𝑟𝑠 𝑖𝑞𝑑0𝑠 +𝜔𝜆𝑞𝑑0𝑠 +𝑑𝜆𝑞𝑑0𝑠
𝑑𝑡
𝑢𝑞𝑑0𝑟′ = 𝑟𝑟′ 𝑖𝑞𝑑0𝑟
′ + (𝜔 − 𝜔𝑟)𝜆𝑞𝑑0𝑟′ +
𝑑𝜆𝑞𝑑0𝑟′
𝑑𝑡
Donde ω se corresponde con la velocidad de giro de los ejes arbitrarios de referencia, y 𝜔𝑟 es
la velocidad eléctrica del rotor, ambas dadas en rad/s. Por tanto, expresando estas ecuaciones en cada
eje (sin forma matricial), tal como se expone en [13], [14] y [15], nos queda:
Ecuaciones de las tensiones del estátor (ejes qd0):
𝑢𝑞𝑠 = 𝑟𝑠𝑖𝑞𝑠 +𝜔𝜆𝑑𝑠 +𝑑𝜆𝑞𝑠
𝑑𝑡
𝑢𝑑𝑠 = 𝑟𝑠𝑖𝑑𝑠 −𝜔𝜆𝑞𝑠 +𝑑𝜆𝑑𝑠𝑑𝑡
𝑢0𝑠 = 𝑟𝑠𝑖0𝑠 +𝑑𝜆0𝑠𝑑𝑡
Ecuaciones de las tensiones del rotor, referidas al lado del estátor (ejes qd0):
𝑢𝑞𝑟′ = 𝑟𝑟
′𝑖𝑞𝑟′ + (𝜔 − 𝜔𝑟)𝜆𝑑𝑟
′ +𝑑𝜆𝑞𝑟′
𝑑𝑡
𝑢𝑑𝑟′ = 𝑟𝑟
′𝑖𝑑𝑟′ − (𝜔 − 𝜔𝑟)𝜆𝑞𝑟
′ +𝑑𝜆𝑑𝑟′
𝑑𝑡
𝑢0𝑟′ = 𝑟𝑟
′𝑖0𝑟′ +
𝑑𝜆0𝑟′
𝑑𝑡
Del mismo modo, los flujos concatenados vienen dados en los ejes qd0 según lo siguiente:
Ecuaciones de los flujos concatenados del estátor (ejes qd0):
𝜆𝑞𝑠 = (𝐿𝑙𝑠 + 𝐿𝑀)𝑖𝑞𝑠 + 𝐿𝑀𝑖𝑞𝑟′
𝜆𝑑𝑠 = (𝐿𝑙𝑠 + 𝐿𝑀)𝑖𝑑𝑠 + 𝐿𝑀𝑖𝑑𝑟′
𝜆0𝑠 = 𝐿0𝑠𝑖0𝑠

52
Ecuaciones de los flujos concatenados del rotor, referidos al lado del estátor (ejes qd0):
𝜆𝑞𝑟′ = 𝐿𝑀𝑖𝑞𝑠 + (𝐿𝑙𝑟
′ + 𝐿𝑀)𝑖𝑞𝑟′
𝜆𝑑𝑟′ = 𝐿𝑀𝑖𝑑𝑠 + (𝐿𝑙𝑟
′ + 𝐿𝑀)𝑖𝑑𝑟′
𝜆0𝑟′ = 𝐿𝑙𝑟
′ 𝑖0𝑟′
Donde 𝐿𝑀 =3
2𝐿𝑚𝑠 es la inductancia mutua. Estas ecuaciones han sido utilizadas en el
modelado en Simulink-Simpower para simular el comportamiento de la máquina eléctrica en el
conjunto del aerogenerador. Los circuitos equivalentes correspondientes a los ejes qd0 en los que se
han expresado las ecuaciones de la máquina de inducción doblemente alimentada se han extraído de
[14], y se muestran en la Figura 3.12, Figura 3.13 y Figura 3.14, en donde aparecen representadas la
velocidad síncrona de los ejes qd0 (que se corresponde con la frecuencia angular del estátor de la
máquina, 𝜔𝑠 = 2𝜋𝑓𝑠), además de la velocidad eléctrica del rotor, 𝜔𝑟:
FIGURA 3.12 CIRCUITO EQUIVALENTE DE UNA MÁQUINA DE INDUCCIÓN TRIFÁSICA DOBLEMENTE
ALIMENTADA REPRESENTADO EN EL EJE Q
FIGURA 3.13 CIRCUITO EQUIVALENTE DE UNA MÁQUINA DE INDUCCIÓN TRIFÁSICA DOBLEMENTE
ALIMENTADA REPRESENTADO EN EL EJE D

53
FIGURA 3.14 CIRCUITO EQUIVALENTE DE UNA MÁQUINA DE INDUCCIÓN TRIFÁSICA DOBLEMENTE
ALIMENTADA REPRESENTADO EN EL EJE 0
Ecuaciones del par electromagnético (ejes qd0):
El par electromagnético desarrollado (en Nm) puede ser expresado en términos de las
corrientes y flujos concatenados en los ejes qd0, indicando que el desacoplamiento entre el control de
la potencia activa y el de la reactiva es factible [4]. Su expresión queda, según expone Krause [14]:
𝑇𝑒𝑚 =3
2𝑝(𝜆𝑞𝑟
′ 𝑖𝑑𝑟′ − 𝜆𝑑𝑟
′ 𝑖𝑞𝑟′ ) =
3
2𝑝(𝜆𝑑𝑠𝑖𝑞𝑠 − 𝜆𝑞𝑠𝑖𝑑𝑠)
Donde p era el número de pares de polos de la máquina eléctrica. O bien, como aparece en
[13]:
𝑇𝑒𝑚 =3
2𝑝𝐿𝑚𝐿𝑟(𝑖𝑞𝑠𝜆𝑑𝑟
′ − 𝑖𝑑𝑠𝜆𝑞𝑟′ )
También podemos expresar este par en función del flujo concatenado por segundo, ψ, y las
intensidades en ejes qd0:
𝑇𝑒𝑚 =3
2𝑝1
𝜔𝑏(𝜓𝑞𝑟
′ 𝑖𝑑𝑟′ − 𝜓𝑑𝑟
′ 𝑖𝑞𝑟′ ) =
3
2𝑝1
𝜔𝑏(𝜓𝑑𝑠𝑖𝑞𝑠 − 𝜓𝑞𝑠𝑖𝑑𝑠)
Donde ωb es la velocidad eléctrica base.
Además, es interesante expresar también el par electromagnético sólo en función de las
intensidades en los ejes de referencia qd0:
𝑇𝑒𝑚 =3
2𝑝𝐿𝑚(𝑖𝑞𝑠𝑖𝑑𝑟
′ − 𝑖𝑑𝑠𝑖𝑞𝑟′ )
E incluso, en función únicamente del flujo concatenado por segundo:
𝑇𝑒𝑚 =3
2𝑝𝑋𝑚𝐷𝜔𝑠
(𝜓𝑞𝑠𝜓𝑑𝑟′ − 𝜓𝑑𝑠𝜓𝑞𝑟
′ )

54
Siendo 𝐷 = (𝑋𝑙𝑠 +𝑋𝑀)(𝑋𝑙𝑟′ +𝑋𝑀) + (𝑋𝑀)
2 , y donde las reactancias X se obtienen del
producto de ωs por las inductancias L.
Normalizando las magnitudes, y expresándolas en p.u. como en [14] y [16]:
𝑇𝑒𝑚 = (𝜓𝑞𝑟′ 𝑖𝑑𝑟
′ − 𝜓𝑑𝑟′ 𝑖𝑞𝑟
′ ) = (𝜓𝑑𝑠𝑖𝑞𝑠 − 𝜓𝑞𝑠𝑖𝑑𝑠)
Por último, necesitamos la ecuación de movimiento del rotor que relacione el par mecánico
con el electromagnético, en la que aparece la inercia, J, del propio rotor junto con la carga mecánica
conectada, y ωm, la velocidad mecánica del rotor (𝜔𝑚 =𝜔𝑟
𝑝) [13]:
𝐽𝑑𝜔𝑚𝑑𝑡
= 𝑇𝑒𝑚 − 𝑇𝑚
O bien, normalizando la ecuación en p.u. [14]:
2𝐻𝑑 (𝜔𝑟𝜔𝑠)
𝑑𝑡= 𝑇𝑒𝑚 − 𝑇𝑚
Donde la inercia (𝐻 =1
2
𝐽𝜔𝑠
𝑝𝑇𝑏) está expresada en segundos y Tb es el par base.
3.4 Convertidores del lado de la red (GSC) y del lado del rotor
(RSC) del DFIG.
Ambos convertidores, el del lado de la red (del inglés, Grid Side Converter, GSC) y el del
lado del rotor (del inglés, Rotor Side Converter, RSC), están formados por un puente de transistores
IGBT (Insulated Gate Bipolar Transistor), conectados a su vez mediante un enlace de corriente
continua con un condensador. Estos convertidores pueden funcionar tanto de rectificadores como de
inversores de tensión, dependiendo de si el flujo de potencia va hacia la red o en sentido contrario.

55
FIGURA 3.15 DETALLE DEL CIRCUITO DE UN CONVERTIDOR FORMADO POR TRANSISTORES IGBT
CON DIODO
Como vimos anteriormente, la máquina se puede encontrar en estado subsíncrono o
supersíncrono, dependiendo de la velocidad del rotor respecto de la de sincronismo. En el primer caso,
la secuencia de las fases de la tensión generada por el convertidor del lado del rotor (RSC) es positiva.
En cambio, si el generador se encuentra funcionando a una velocidad mayor que la de sincronismo
estas tensiones serán de secuencia inversa.
Para el funcionamiento supersíncrono, la potencia del rotor, Pr, es transmitida al condensador
DC y tiende a incrementar la tensión del bus de continua. En cambio, en funcionamiento subsíncrono,
Pr se extrae del condensador y tiende a decrementar la tensión. El convertidor GSC se utiliza para
generar o absorber la potencia Pgc, de manera que se mantenga la tensión en el bus DC constante. Si
despreciamos las pérdidas del convertidor, esta potencia será igual a Pr, absorbida o generada por el
GSC.
3.4.1 Control del RSC.
El convertidor del lado del rotor se utiliza para controlar, por un lado, la potencia activa
entregada por el aerogenerador, y por otro, la tensión (o potencia reactiva) medida en los terminales
de la red.
La potencia de la turbina se controla de tal manera que siga una curva predefinida llamada
característica de seguimiento (ver línea roja en la Figura 3.16). Esta característica está representada
sobre las curvas de la potencia mecánica obtenida para diferentes velocidades del viento. La velocidad
actual de la turbina es medida en cada instante y su potencia mecánica correspondiente es usada como
potencia de referencia en el bucle de control. La característica de seguimiento está definida por 4
puntos: A, B, C y D.
Desde velocidad nula hasta la velocidad en el punto A, la potencia de referencia es cero. Entre
el punto A y el B, la curva de seguimiento es una línea recta, donde la velocidad del punto B debe ser

56
mayor que la de A. Entre B y C, la curva crece paulatinamente hasta llegar al punto C, en el que
obtenemos el punto de operación óptimo para una velocidad del viento dada de 12 m/s, y una velocidad
de la turbina de 1.2 p.u. Desde C a D la característica es una línea recta con la que se alcanza el valor
1 p.u. de la potencia nominal de la turbina, y la velocidad en D debe ser ligeramente mayor que en C.
Más allá del punto D, la potencia de referencia se mantiene constante e igual a 1 p.u.
FIGURA 3.16 CARACTERÍSTICA OPERACIONAL Y DE SEGUIMIENTO DE LA TURBINA EÓLICA.
3.4.1.1 Control del RSC para la potencia activa.
El bucle genérico de control de potencia se muestra en la Figura 3.17. La potencia eléctrica
de salida actual, Pgen, medida en los terminales de red de la turbina, se suma con las pérdidas totales
(mecánicas y eléctricas), Plosses, y se comparan con la potencia de referencia, Pref, obtenida de la
característica de operación. Se utiliza un controlador PI para reducir el error al máximo, y a la salida
de éste obtenemos la intensidad de referencia del rotor, Iqr_ref, que debe de ser inyectada en el circuito
rotórico por el RSC. Esta es la componente de la corriente que produce el par electromagnético. A
continuación, comparamos la corriente medida de secuencia directa con la de referencia, y el error se

57
minimiza con otro controlador PI. La salida de éste será la tensión Vqr generada por el convertidor del
lado del rotor.
FIGURA 3.17 ESQUEMA DE CONTROL DEL CONVERTIDOR RSC.
Además, la tensión o la potencia reactiva pueden ser controladas por las corrientes que fluyan
por el RSC.
3.4.1.2 Control del RSC en modo de regulación de tensiones.
Asumiendo que el convertidor del lado de red (GSC) mantiene constante la tensión del enlace
de continua, el trabajo del RSC consiste en inyectar corrientes de frecuencia rotórica variable en los
devanados del rotor, de manera que se pueda conseguir el desacople en el control de la potencia activa
y de la reactiva. Gracias a la descomposición de las magnitudes eléctricas expresadas en los ejes qd0,
las corrientes rotóricas también quedan descompuestas en el eje q (Potencia Activa) y el eje d (Potencia
Reactiva).
Con cambios en la velocidad del viento, la velocidad del generador (o su deslizamiento)
cambia, y, por tanto, también lo hace la frecuencia de las corrientes rotóricas, como se afirma en varias
publicaciones como [17], [18], [19] o [20]. Como hemos dicho, se compara la potencia activa actual
(Pgen) y las pérdidas, con el valor de referencia (Pref), el cual es determinado por la característica

58
dependiente de la velocidad del viento, y se utiliza un controlador PI para generar el valor de la
corriente rotórica de referencia en el eje q (Iqr_ref). Pero, además, de la misma forma, para controlar la
potencia reactiva, se utiliza otro controlador PI para generar la corriente rotórica de referencia en el
eje d requerida (Idr_ref) [21]. Las ganancias, proporcional (Kp) e integral (Ki), de los controladores,
vienen dadas por el modelo en Matlab-Simulink, [22].
3.4.1.3 Control del RSC en modo de regulación de la potencia reactiva.
Como vemos en la Figura 3.17, la intensidad rotórica de referencia en el eje d, Idr_ref, puede
resultar de la salida del regulador de tensión, o del regulador de reactiva, con la estrategia de control
como aparece en [23]. Se utiliza el mismo tipo de regulador para comparar esta intensidad de
referencia con su intensidad actual de secuencia directa que en el caso de la componente de la corriente
en el eje q. La salida de este regulador será la componente de la tensión en el eje d, Vdr, generada por
el convertidor RSC.
Comentar además, que el valor de la intensidad rotórica de referencia es igual a:
𝐼𝑟_𝑟𝑒𝑓 = √𝐼𝑑𝑟_𝑟𝑒𝑓2 + 𝐼𝑞𝑟_𝑟𝑒𝑓
2
Y que el máximo valor de esta corriente es 1 p.u. Cuando Ir_ref supera este valor, Iqr_ref se
reduce para devolver la magnitud hasta su valor nominal.
3.4.2 Control del GSC.
El convertidor del lado de la red (GSC) se utiliza para regular la tensión del condensador en
corriente continua según la dirección de la potencia Pgc que lo atraviese. Además, es capaz de generar
o absorber potencia reactiva. El sistema de control utilizado se ilustra en la Figura 3.18:

59
FIGURA 3.18 ESQUEMA DE CONTROL DEL CONVERTIDOR GSC.
Este control consiste en:
Medida de las componentes q y d de las intensidades en secuencia directa que atraviesan el
convertidor para ser controladas, además de la tensión del bus DC, Vdc.
Un bucle de regulación externo consistente en un regulador de la tensión DC. La salida de
este último es la corriente de referencia en el eje d, Idgc_ref.
Un bucle de regulación interno de intensidad. Este regulador controla la magnitud y la fase
de la tensión generada por el convertidor GSC, con la Idgc_ref obtenida del regulador de tensión
DC y la Iqr_ref especificada.
El módulo de esta corriente de referencia del GSC es igual a:
𝐼𝑔𝑐_𝑟𝑒𝑓 = √𝐼𝑑𝑔𝑐_𝑟𝑒𝑓2 + 𝐼𝑞𝑟_𝑟𝑒𝑓
2
El máximo valor de esta corriente está limitado por la potencia máxima del convertidor a
tensión nominal. Cuando Idgc_ref e Iqr_ref son tales que el módulo de la intensidad del convertidor supera
el valor máximo, la componente Iqr_ref se reduce para, de ese modo, devolver el módulo de la corriente
a su valor máximo.

60
Capítulo 4
MODELOS MULTIMASAS
4.1 Introducción
Los modelos clásicos o habituales de parámetros concentrados de las turbinas eólicas resultan
insuficientes para poder describir los complejos fenómenos transitorios que se producen en las
estructuras tridimensionales de la generación actual de turbinas eólicas. En la literatura técnica es
bastante común encontrar trabajos en los que se pone de manifiesto la influencia de la elasticidad y
flexibilidad de las palas y otros elementos mecánicos, como pueden ser los ejes, en la estabilidad
transitoria de los sistemas de generación eólicos. Para describir adecuadamente esa dinámica es
preciso acudir a modelos más detallados. Una posibilidad es sustituir el modelo de parámetros
concentrado clásico por una serie de submodelos o modelos parciales acoplados entre sí. Este enfoque
permite descomponer la turbina eólica, un complejo objeto tridimensional, en sus principales
componentes estructurales y representar cada uno de ellos mediante un submodelo o modelo parcial
con parámetros concentrados [24].
Vamos a empezar mostrando un esquema del sistema mecánico del aerogenerador en su
conjunto, utilizando un modelo de 3 masas. Podríamos haber elegido, para una mayor exactitud del
estudio, un sistema formado, por ejemplo, por 5 masas (cada una de las palas por separado, más buje
y generador), como se ha realizado en algunos artículos sobre este tema, pero la complejidad del
modelo sería tan alta y los resultados respecto a un modelo de 3 masas diferirían tan poco, que hemos
preferido partir de este modelo, el cual proporciona resultados bastante cercanos a la realidad y nos
permitirá hacernos una idea muy buena del funcionamiento real de una turbina eólica.
4.2 Modelo de tres masas
En la Figura 4.1 aparecen los principales componentes estructurales del accionamiento
mecánico del rotor de la turbina eólica: las palas (álabes de la turbina), el buje, el eje de baja velocidad
(eje de la turbina), la caja multiplicadora de velocidad, el eje de alta velocidad (eje del generador de
inducción) y el rotor del generador de inducción, agrupados en un modelo de tres masas (Palas-Buje-
Generador).
De entre todos ellos, el eje de baja velocidad (acoplamiento buje-generador, físicamente unión
entre buje y caja multiplicadora) es el componente más flexible, elástico (el que posee menor constante
de rigidez, K), mientras que las palas y el rotor del generador de inducción son los componentes más

61
rígidos y con mayor inercia, [24] y [25]. Por tanto, en posteriores apartados veremos como la constante
de rigidez utilizada para las palas (unión Palas-Buje) será más alta que la constante del eje de baja
velocidad (unión Buje-Generador). Para tener en cuenta los efectos de la elasticidad y flexión de las
palas (el conjunto de las tres palas son consideradas como una unidad), sin renunciar a la utilización
de un modelo de parámetros concentrados, se modela este efecto mediante un muelle en la base de las
palas (como podemos ver en la Figura 4.1). El submodelo de parámetros concentrados de las palas,
además del coeficiente de elasticidad entre palas y buje, Kbh, se completa con el coeficiente de
amortiguamiento mutuo entre las palas y el buje, Dbh, la constante de inercia de las palas, Hb, y el
coeficiente propio de amortiguamiento, Db, el cual implica una pérdida de par transmitido [26].
FIGURA 4.1 DESCRIPCIÓN DEL SISTEMA DE TRANSMISIÓN MECÁNICO DE UNA TURBINA EÓLICA
COMO UN MODELO DE TRES MASAS: PALAS-BUJE-GENERADOR.
La Figura 4.1 muestra un posible modelo de tres cuerpos o masas (o inercias) para describir
la dinámica de una turbina eólica. La primera masa (inercia) representa las palas (en inglés, blades),
Hb; la segunda masa representa el buje (en inglés, hub), Hh, y donde se incluye además el eje de baja
velocidad; mientras que la tercera masa representa el generador de inducción, Hg, incluyéndose aquí
las masas o inercias de la caja reductora, el eje de alta velocidad y el rotor del generador.

62
Como puede comprobarse en la Figura 4.1, los subsistemas interaccionan entre sí: el
subsistema de las palas interactúa con el del buje y éste con el del generador. El acoplamiento elástico
y con pérdidas entre las palas y el buje se modela mediante del coeficiente de elasticidad entre palas
y buje, Kbh, y el coeficiente de amortiguamiento mutuo entre las palas y el buje, Dbh (dependiente del
tipo de material de la unión). Análogamente, el acoplamiento elástico y con pérdidas entre el buje y el
rotor del generador se modela mediante del coeficiente de elasticidad entre el buje y el rotor del
generador, Khg, y el coeficiente de amortiguamiento mutuo entre el buje y el rotor del generador, Dhg
(dependiente del tipo de material de los ejes de baja y alta velocidad). Por último, Db, Dh y Dg, son los
coeficientes propios de amortiguación de las palas (que representa la resistencia aerodinámica que se
produce en las palas), el buje (que representa la fricción mecánica en el rodamiento principal de la
turbina) y el rotor del generador (que corresponde a la fricción mecánica en los cojinetes del rotor y la
ventilación del generador), respectivamente.
Las ecuaciones que gobiernan la dinámica del sistema mecánico de transmisión del rotor de
una turbina eólica modelada con 3 masas como en la Figura 4.1, expresadas en valores normalizados
(p.u.), son las siguientes:
2𝐻𝑏𝑑𝜔𝑏𝑑𝑡
= −𝑇𝑤 − 𝐷𝑏𝜔𝑏 + (𝐾𝑏ℎ𝜃𝑏ℎ + 𝐷𝑏ℎ(𝜔𝑏 −𝜔ℎ))
2𝐻ℎ𝑑𝜔ℎ𝑑𝑡
= −(𝐾𝑏ℎ𝜃𝑏ℎ +𝐷𝑏ℎ(𝜔𝑏 −𝜔ℎ)) − 𝐷ℎ𝜔ℎ + (𝐾ℎ𝑔𝜃ℎ𝑔 + 𝐷ℎ𝑔(𝜔ℎ −𝜔𝑔))
2𝐻𝑔𝑑𝜔𝑔
𝑑𝑡= −(𝐾ℎ𝑔𝜃ℎ𝑔 + 𝐷ℎ𝑔(𝜔ℎ −𝜔𝑔)) − 𝐷𝑔𝜔𝑔 + 𝑇𝑒
𝑑𝜃𝑏ℎ𝑑𝑡
= 𝜔𝑠(𝜔𝑏 −𝜔ℎ)
𝑑𝜃ℎ𝑔
𝑑𝑡= 𝜔𝑠(𝜔ℎ −𝜔𝑔)
Hb, Hh, y Hg, son las constantes de inercia (en segundos) de las palas, el buje y el rotor del
generador, respectivamente; Db, Dh, y Dg son los coeficientes propios de amortiguación (en p.u.); Dbh
es el coeficiente mutuo de amortiguamiento entre las palas y el buje y Dhg el coeficiente mutuo de
amortiguamiento entre el buje y el rotor del generador (ambos en p.u.); Kbh es el coeficiente de
elasticidad entre las palas y el buje y Khg el coeficiente de elasticidad entre el buje y el rotor del
generador, como ya habíamos comentado anteriormente (en p.u./rad eléctricos). Además, en estas
expresiones aparecen ωb, ωh, y ωg, que son las velocidades de rotación (en p.u.) de las palas, el buje y
el rotor del generador, respectivamente; θbh es el ángulo de torsión (en rad) entre las palas y el buje
(𝜃𝑏ℎ = 𝜃𝑏 − 𝜃ℎ) y θhg el ángulo (de torsión) entre el buje y el rotor del generador (𝜃ℎ𝑔 = 𝜃ℎ − 𝜃𝑔); ωs

63
es la velocidad síncrona del sistema eléctrico, en rad/s (𝜔𝑠 =2𝜋𝑓
𝑝, siendo f la frecuencia base del
sistema y p el número de pares de polos de la máquina eléctrica); Tw es el par aerodinámico que
suministra el viento y Te es el par electromagnético del generador (valor negativo para funcionamiento
generador).
La velocidad síncrona, ωs, es necesaria en las ecuaciones diferenciales de los ángulos de
torsión de una masa respecto a otra, debido a que las velocidades de estas masas no presentan unidades,
están normalizadas (en p.u.). Y, sin embargo, el otro término de la ecuación está formado por la
derivada del ángulo correspondiente respecto al tiempo, lo que nos da unidades de rad/s, justamente
las mismas unidades que la velocidad de sincronismo, quedando ajustada la ecuación diferencial en
cuanto a magnitudes se refiere.
Nótese que las anteriores ecuaciones están escritas según el funcionamiento de la máquina de
inducción como motor, debido a que así es como está definido el modelo que vamos a utilizar de
máquina asíncrona en Matlab-Simulink con el complemento SimPowerSystems [22]. Si nos fijamos
en el par electromagnético (Te), éste aparece con signo positivo quedando el resto de términos de esa
ecuación con signo contrario, como fuerzas opuestas a este par electromagnético, origen del
movimiento del rotor en un motor. Así, el término (𝐾ℎ𝑔𝜃ℎ𝑔 +𝐷ℎ𝑔(𝜔ℎ −𝜔𝑔)) se corresponde con el
par mecánico entregado por el motor en su eje, al que llamaremos Tm o Thg (por ser el que se transfiere
del generador al buje). Si continuamos con esta explicación usando un balance de potencias (o de par
en este caso), pasamos por el par Tbh (entregado por el buje a las palas) que se correspondería con el
término (𝐾𝑏ℎ𝜃𝑏ℎ + 𝐷𝑏ℎ(𝜔𝑏 −𝜔ℎ)) , hasta llegar al par útil, Tw, en las palas de nuestra turbina
(estarían actuando como un ventilador gigante), el cual, por supuesto, sería inferior al par entregado
por el motor, Tm, debido a las pérdidas producidas en todo el sistema, y positivo.
Si queremos, sin embargo, que nuestra máquina se comporte como generador debemos
introducirle un par de entrada, Tw, negativo, de tal forma que al realizar el balance de potencias a la
inversa lleguemos a obtener un par de entrada al motor también negativo y, obviamente, de menor
valor absoluto, Tm. Así, nuestra máquina modelada en Simulink funcionará como generador con un
par electromagnético negativo. Para mayor comprensión de lo explicado mostramos a continuación
las ecuaciones de la máquina asíncrona en funcionamiento como generador:
2𝐻𝑏𝑑𝜔𝑏𝑑𝑡
= 𝑇𝑤 − 𝐷𝑏𝜔𝑏 − (𝐾𝑏ℎ𝜃𝑏ℎ + 𝐷𝑏ℎ(𝜔𝑏 −𝜔ℎ))
2𝐻ℎ𝑑𝜔ℎ𝑑𝑡
= (𝐾𝑏ℎ𝜃𝑏ℎ + 𝐷𝑏ℎ(𝜔𝑏 −𝜔ℎ)) − 𝐷ℎ𝜔ℎ − (𝐾ℎ𝑔𝜃ℎ𝑔 + 𝐷ℎ𝑔(𝜔ℎ −𝜔𝑔))
2𝐻𝑔𝑑𝜔𝑔
𝑑𝑡= (𝐾ℎ𝑔𝜃ℎ𝑔 + 𝐷ℎ𝑔(𝜔ℎ −𝜔𝑔)) − 𝐷𝑔𝜔𝑔 − 𝑇𝑒

64
𝑑𝜃𝑏ℎ𝑑𝑡
= 𝜔𝑠(𝜔𝑏 −𝜔ℎ)
𝑑𝜃ℎ𝑔𝑑𝑡
= 𝜔𝑠(𝜔ℎ −𝜔𝑔)
Recordamos, no obstante, que nosotros nos basaremos en las ecuaciones de la máquina en
modo motor para proceder con las simulaciones en Simulink, y, por tanto, los pares obtenidos
aparecerán como negativos.
Por tanto, teniendo claro que el viento es el artífice del movimiento de la turbina y que
introduce en ella un par que depende de diversos factores, como vimos anteriormente, vamos a definir
el par que aplica directamente en las palas de la turbina. Siendo ρ es la densidad del aire, R es el radio
de la turbina (palas), v es la velocidad del viento y 𝐶𝑝(𝜆, 𝛽) es coeficiente de potencia de la turbina
que depende de la velocidad (normalizada) de la punta de la pala, (𝜆 =𝑅𝜔𝑏
𝑣), y del ángulo de paso de
las palas, β, entonces, el par aerodinámico, Tw, puede calcularse mediante la expresión:
𝑇𝑤 =1
2𝜌𝜋𝑅2𝑣3𝐶𝑝(𝜆, 𝛽)
1
𝜔𝑏
Es necesario comentar que en algunas publicaciones, como en [7], se modela el sistema con
3 masas distintas a las que se han utilizado en este trabajo. Esas masas serían 1.Turbina, 2.Caja
Multiplicadora, y 3.Generador. Este caso es útil si deseamos realizar un análisis comparativo entre el
comportamiento del eje de baja velocidad con el de alta velocidad.
4.3 Modelo de dos masas
La Figura 4.2 muestra el modelo de dos masas (bimasa). Este puede considerarse como un
modelo simplificado o reducido del modelo de tres masas o trimasa anterior. El uso de un modelo u
otro permitirá comparar la dinámica de la interacción entre la turbina y el sistema eléctrico. Este suele
ser el modelo más utilizado en la bibliografía acerca del modelado de turbinas eólicas, debido
fundamentalmente a su buen comportamiento y parecido respecto al modelo de tres masas, [27].

65
FIGURA 4.2 DESCRIPCIÓN DEL SISTEMA DE TRANSMISIÓN MECÁNICO DE UNA TURBINA EÓLICA
COMO UN MODELO DE DOS MASAS: TURBINA-GENERADOR.
La Figura 4.2 muestra el modelo de eje con dos masas concentradas (este modelo representa
todo el rotor de la turbina (palas y buje) como un único sistema rígido en una de las masas. Es decir,
utiliza un modelo de parámetros concentrados para todo el sistema mecánico unido al eje de baja
velocidad. La segunda masa es la del generador, incluyéndose aquí las masas o inercias de la caja
reductora, el eje de alta velocidad y el rotor del generador, como en el modelo de tres masas anterior.
Este modelo es el resultado de la unión rígida de los submodelos de palas y buje del modelo anterior,
que dan lugar al submodelo de turbina (representado por la sigla “t”). En este modelo, el sistema de
transmisión mecánico de la turbina se reduce a un modelo con dos masas concentradas (turbina y
generador) unidas mediante un eje elástico con pérdidas. Las ecuaciones diferenciales del movimiento
de este modelo de dos masas son las siguientes:
2𝐻𝑡𝑑𝜔𝑡𝑑𝑡
= −𝑇𝑤 − 𝐷𝑡𝜔𝑡 + (𝐾𝑡𝑔𝜃𝑡𝑔 + 𝐷𝑡𝑔(𝜔𝑡 −𝜔𝑔))
2𝐻𝑔𝑑𝜔𝑔
𝑑𝑡= −(𝐾𝑡𝑔𝜃𝑡𝑔 + 𝐷𝑡𝑔(𝜔𝑡 −𝜔𝑔)) − 𝐷𝑔𝜔𝑔 + 𝑇𝑒
𝑑𝜃𝑡𝑔
𝑑𝑡= 𝜔𝑠(𝜔𝑡 −𝜔𝑔)

66
En estas ecuaciones, ωt es la velocidad de la turbina (velocidad del eje de baja velocidad), θtg
el ángulo (de torsión) entre la turbina y el rotor del generador (𝜃𝑡𝑔 = 𝜃𝑡 − 𝜃𝑔), 𝐷𝑡𝑔 = 𝐷ℎ𝑔 es el
coeficiente de amortiguación entre el rotor de la turbina (incluyendo palas y buje) y el generador (que
coincide con el coeficiente de amortiguamiento entre el buje y el generador en el modelo de tres
masas), Ht, es la constante de inercia (p.u.) del rotor completo de la turbina (incluyendo palas y buje)
y Dt, es el coeficiente propio de amortiguación de la turbina. En este caso, el término
(𝐾𝑡𝑔𝜃𝑡𝑔 +𝐷𝑡𝑔(𝜔𝑡 −𝜔𝑔)) se identifica con el par transmitido por la turbina (palas, buje y eje de baja
velocidad) al generador, Ttg.
Como se ha indicado, este modelo se deriva del de tres masas rigidizando los submodelos
representativos de las palas y el buje (el submodelo del generador es el mismo). Esto nos permite
obtener los parámetros del modelo de dos masas a partir del original de tres masas mediante las
relaciones siguientes:
𝐻𝑡 = 𝐻𝑏 +𝐻ℎ
𝐷𝑡 = 𝐷𝑏 + 𝐷ℎ
Estas relaciones pueden justificarse mediante una analogía eléctrica de las ecuaciones
mecánicas en la que los pares se pueden comparar con fuentes de tensión, las velocidades se asemejan
a intensidades, las constantes de inercia se pueden relacionar con inductancias, los coeficientes de
amortiguamiento con resistencias y la inversa de los coeficientes de elasticidad se asemejan a
condensadores.
4.4 Modelo concentrado de una masa
En este caso, todos los componentes mecánicos del aerogenerador se consideran concentrados
en una única masa. Podría derivarse de los modelos de dos o tres masas precedentes, uniendo todos
los componentes en uno solo. La ecuación diferencial del movimiento de este modelo de una única
masa se reduce a:
2𝐻𝑀𝑑𝜔𝑀𝑑𝑡
= −𝑇𝑤 − 𝐷𝑀𝜔𝑀 + 𝑇𝑒

67
Donde HM es la constante de inercia (en s) conjunta de todo el sistema, masa o sólido rígido
(incluyendo palas, buje, generador, así como ejes y caja multiplicadora); ωM es la velocidad de giro
de la turbina (velocidades normalizadas en p.u. de los ejes de baja y alta velocidad) y DM, es el
coeficiente de amortiguación de todo el conjunto rotativo. La Figura 4.3 nos muestra el modelo
concentrado de una sola masa.
FIGURA 4.3 DESCRIPCIÓN DEL SISTEMA DE TRANSMISIÓN MECÁNICO DE UNA TURBINA EÓLICA
COMO UN MODELO DE UNA SOLA MASA, TODO EL SISTEMA EN SU CONJUNTO ES UN SÓLIDO
RÍGIDO.
Se puede observar que se han perdido todos los conectores que unían a las distintas masas en
los modelos anteriores (a saber, constantes elásticas y constantes de amortiguamiento mutuo), debido
a que en este modelo el sistema actúa como un sólido rígido ideal, sin flexiones ni torsiones entre sus
partes. Por otro lado, podemos decir que la inercia y el coeficiente de amortiguamiento propio del
modelo vienen dados por las siguientes expresiones:
𝐻𝑀 = 𝐻𝑏 +𝐻ℎ +𝐻𝑔 = 𝐻𝑡 +𝐻𝑔
𝐷𝑀 = 𝐷𝑏 + 𝐷ℎ + 𝐷𝑔 = 𝐷𝑡 + 𝐷𝑔

68
A continuación, explicaremos el motivo de que podamos concentrar las diferentes masas de
los modelos más complejos hasta llegar a este modelo reducido de 1 sola masa, basándonos en la
analogía eléctrica de las ecuaciones mecánicas del sistema.
4.5 Analogía electromecánica
Para establecer un modelo de circuito eléctrico equivalente a un sistema mecánico puede
partirse de un sistema mecánico simple compuesto por una inercia, J, un muelle, K, y un elemento de
disipación, D, todo ello accionado por un cierto par acelerador (diferencia entre el par
electromagnético y el mecánico, 𝑇 = 𝑇𝑒 − 𝑇𝑀), cuya ecuación dinámica sea [24]:
𝑇 = 𝑇𝑒 − 𝑇𝑀 = 𝐽𝑑𝜔
𝑑𝑡+ 𝐾𝜔 + 𝐷𝜃
𝜔 =𝑑𝜃
𝑑𝑡
Aplicando la transformada de Laplace con condiciones iniciales nulas:
𝑇(𝑠) = 𝑇𝑒(𝑠) − 𝑇𝑀(𝑠) = 𝑠𝐽𝜔(𝑠) + 𝐾𝜔(𝑠) + 𝐷𝜃(𝑠)
𝜔(𝑠) = 𝑠𝜃(𝑠)
Quedando:
𝑇(𝑠) = 𝑇𝑒(𝑠) − 𝑇𝑀(𝑠) = 𝑠𝐽𝜔(𝑠) + 𝐾𝜔(𝑠) +𝐷
𝑠𝜔(𝑠)
La ecuación del sistema mecánico podría corresponder también a la ecuación de una malla
eléctrica constituida por una bobina, L, una resistencia, R, y un condensador, C, alimentada por una
fuente de tensión, u, cuya ecuación fuese:
𝑢 = 𝑢𝑒 − 𝑢𝑀 = 𝑢𝐿 + 𝑢𝑅 + 𝑢𝐶 = 𝐿𝑑𝑖
𝑑𝑡+ 𝑅𝑖 +
1
𝐶𝑞
𝑖 =𝑑𝑞
𝑑𝑡
Aplicando la transformada de Laplace con condiciones iniciales nulas:
𝑈(𝑠) = 𝑈𝑒(𝑠) − 𝑈𝑀(𝑠) = 𝑈𝐿(𝑠) + 𝑈𝑅(𝑠) + 𝑈𝐶(𝑠) = 𝑠𝐿𝐼 + 𝑅𝐼(𝑠) +1
𝐶𝑄(𝑠)

69
𝐼(𝑠) = 𝑠𝑄(𝑠)
Quedando:
𝑈(𝑠) = 𝑈𝑒(𝑠) − 𝑈𝑀(𝑠) = 𝑈𝐿(𝑠) + 𝑈𝑅(𝑠) + 𝑈𝐶(𝑠) = 𝑠𝐿𝐼 + 𝑅𝐼(𝑠) +1
𝑠𝐶𝐼(𝑠)
= (𝑠𝐿 + 𝑅 +1
𝑠𝐶) 𝐼(𝑠) = 𝑍(𝑠)𝐼(𝑠)
Otra posibilidad es considerar que la ecuación del sistema mecánico correspondiese también
a la ecuación de un nudo eléctrico al que estuviesen conectados una bobina, L, una resistencia, R (G
= 1/R) y un condensador, C, alimentada por una fuente de intensidad, i, cuya ecuación de intensidades,
derivada (para evitar la integral de la tensión), fuese:
𝑑
𝑑𝑡(𝑖) =
𝑑
𝑑𝑡(𝑖𝑒 − 𝑖𝑀) =
𝑑
𝑑𝑡(𝑖𝐶(𝑠) + 𝑖𝑅(𝑠) + 𝑖𝐿(𝑠)) =
𝑑
𝑑𝑡(𝐶𝑑𝑢
𝑑𝑡) +
𝑑
𝑑𝑡(1
𝑅𝑢) +
1
𝐿𝑢
Aplicando la transformada de Laplace con condiciones iniciales nulas:
𝐼(𝑠) = 𝐼𝑒(𝑠) − 𝐼𝑀(𝑠) = 𝐼𝐶(𝑠) + 𝐼𝑅(𝑠) + 𝐼𝐿(𝑠) = 𝑠𝐶𝑈(𝑠) +1
𝑅𝑈(𝑠) +
1
𝑠𝐿𝑈(𝑠)
= (𝑠𝐶 + 𝐺 +1
𝑠𝐿)𝑈(𝑠) = 𝑌(𝑠)𝑈(𝑠)
La comparación de la ecuación mecánica y las eléctricas permiten establecer dos tipos de
analogías, como se resume en la Tabla 4.1.

70
TABLA 4.1 ANALOGÍAS ELÉCTRICAS DE UN SISTEMA MECÁNICO.
Utilizando la analogía de malla en la que los pares del sistema mecánico se representan por
fuentes de tensión y las intensidades del circuito eléctrico representan velocidades de rotación, la
Figura 4.4 muestra el circuito análogo correspondiente al sistema de tres masas (palas, buje y
generador), la Figura 4.5 el correspondiente al sistema de dos masas (turbina eólica y generador) y la
Figura 4.6 el correspondiente al sistema de parámetros concentrados de una masa (aerogenerador
completo).
FIGURA 4.4 DESCRIPCIÓN DEL SISTEMA MECÁNICO MEDIANTE UN CIRCUITO ELÉCTRICO
ANÁLOGO PARA UN MODELO DE 3 MASAS: PALAS-BUJE-GENERADOR

71
FIGURA 4.5 DESCRIPCIÓN DEL SISTEMA MECÁNICO MEDIANTE UN CIRCUITO ELÉCTRICO
ANÁLOGO PARA UN MODELO DE 2 MASAS: TURBINA-GENERADOR
FIGURA 4.6 DESCRIPCIÓN DEL SISTEMA MECÁNICO MEDIANTE UN CIRCUITO ELÉCTRICO
ANÁLOGO PARA UN MODELO DE 1 MASA
Como se puede ver en las figuras anteriores aparecen representados las fuentes de tensión (los
pares) en un funcionamiento como generador, y no como aparecen en las ecuaciones, en modo motor.
Se observa que, por ejemplo en el modelo de tres masas, el par motor es el creado por el viento (Tw)
incidente sobre las palas de la turbina eólica, y que, por tanto, va a ser superior a los pares intermedios
(Tbh y Thg), así como al par electromagnético que se induce en el estátor del generador en oposición al
par mecánico útil que mueve su rotor, como se puede comprobar en la malla completa de la Figura
4.4. Lo mismo ocurre en la Figura 4.5 y la Figura 4.6, con la única diferencia de que las inercias y las
pérdidas por amortiguamiento se concentran en 2 masas y 1 masa, respectivamente, y que además
desaparecen las uniones elásticas y con amortiguamiento mutuo y, por consiguiente, los pares
intermedios entre las masas involucradas.
La representación análoga como circuito de los sistemas mecánicos permite escribir las
ecuaciones de movimiento mediante una matriz de mallas análoga en la que los elementos de la matriz
pueden obtenerse por simple inspección, siendo Zii(s) igual a la suma de impedancias de la malla i,

72
para i=B, H y G, y Zij(s) igual a la suma de impedancias comunes entre las mallas i y j, para j=B, H,
G, e 𝑖 ≠ 𝑗. De esta forma la ecuación matricial de mallas análoga a la del sistema mecánico de 3 masas
resulta:
(
𝑇𝑤
0
−𝑇𝑒)
=
(
2𝐻𝐵𝑠 + 𝐷𝐵𝐵 +
𝐾𝐵𝐻𝑠
−𝐷𝐵𝐻 −𝐾𝐵𝐻𝑠
0
−𝐷𝐵𝐻 −𝐾𝐵𝐻𝑠
2𝐻𝐻𝑠 + 𝐷𝐻𝐻 +𝐾𝐻𝐻𝑠
−𝐷𝐻𝐺 −𝐾𝐻𝐺𝑠
0 −𝐷𝐻𝐺 −𝐾𝐻𝐺𝑠
2𝐻𝐺𝑠 + 𝐷𝐺𝐺 +𝐾𝐻𝐺𝑠 )
(
𝜔𝑊
𝜔𝐻
𝜔𝐺)
Siendo:
𝐷𝐵𝐵 = 𝐷𝐵 + 𝐷𝐵𝐻
𝐷𝐻𝐻 = 𝐷𝐻 + 𝐷𝐵𝐻 +𝐷𝐻𝐺
𝐷𝐺𝐺 = 𝐷𝐺 + 𝐷𝐻𝐺
𝐾𝐻𝐻 + 𝐾𝐵𝐻 + 𝐾𝐻𝐺
Además, la analogía electromecánica también permite establecer relaciones entre los valores
de los parámetros de los diferentes sistemas mecánicos, que conduce a una interpretación diferente del
enfoque “mecánico” utilizado previamente.
La Figura 4.4 muestra cómo la interacción entre el sistema rígido de las palas y el del buje se
produce mediante la rama transversal formada por la resistencia (elemento disipativo) DBH y el
condensador (elemento de almacenamiento de energía) 1/KBH. La Figura 4.5 muestra el circuito
análogo correspondiente al sistema de dos masas formado por la turbina eólica y el generador. En este
caso, el sistema rígido correspondiente a la turbina eólica es el resultado de agregar el sistema de las
palas y el del buje del modelo de tres masas. Al comparar la Figura 4.4 y la Figura 4.5, puede verse
cómo el resultado de la agregación es la fusión de la malla de las palas y la del buje (del sistema de
tres masas) en una nueva malla de la turbina eólica en el sistema reducido de dos masas. Como
resultado de esta fusión de mallas, en el modelo reducido de dos masas desaparece la rama transversal
que representa la interacción Palas-Buje, lo que equivale a considerar que la resistencia 𝐷𝐵𝐻 → ∞, y
que el condensador 1
𝐾𝐵𝐻→ 0 (o que el coeficiente de elasticidad 𝐾𝐵𝐻 → ∞, lo que equivale a decir que
la conexión entre las palas y el buje se hace rígida). Con esto, los elementos RL de los sistemas de las
palas y el buje quedan serie, lo que permite relacionar los valores de los nuevos parámetros del modelo
reducido de dos masas a partir de los del de tres masas. En este caso es fácil ver que el valor de la
nueva resistencia (elemento disipativo), DT, deberá ser igual a la suma de la resistencia del sistema de
las palas, DB, y la del sistema del buje, DH:

73
𝐷𝑇 = 𝐷𝐵 + 𝐷𝐻
De igual forma el valor del coeficiente de autoinducción de la nueva bobina (elemento de
almacenamiento de energía), o inercia de la nueva masa, 2HW será:
2𝐻𝑇 = 2𝐻𝐵 + 2𝐻𝐻
La rama transversal que representa la interacción entre el sistema del buje y el generador en
el modelo de tres masas se corresponde con la que representa la interacción entre turbina y generador
ahora en el modelo reducido de dos masas, lo que permite escribir:
𝐷𝑇𝐺 = 𝐷𝐻𝐺
1
𝐾𝑇𝐻=1
𝐾𝐻𝐺
De igual forma, al reducir el sistema de dos masas a una, los valores de los nuevos parámetros
son:
𝐷 = 𝐷𝑇 + 𝐷𝐺 = 𝐷𝐵 + 𝐷𝐻 + 𝐷𝐺
2𝐻 = 2𝐻𝑇 + 2𝐻𝐺 = 2𝐻𝐵 + 2𝐻𝐻 + 2𝐻𝐺
Conviene observar que en este modelo de eje rígido con una sola masa, desaparece el
condensador (1
𝐾𝑇𝐺→ 0
⇒ 𝐾𝑇𝐺 → ∞) que representa el coeficiente de elasticidad del eje, lo que resulta
consistente con la hipótesis de rigidez del eje de baja velocidad y de todo el sistema en su conjunto.
Asimismo, sería interesante explicar y hacer ver otro punto de vista en la reducción del modelo
de tres masas al de dos masas. En este capítulo se ha expuesto el motivo de la concentración de las
masas de las palas y el buje en una sola (turbina en el modelo de 2 masas). Esto equivale a decir que
la constante de rigidez, así como el amortiguamiento mutuo, entre ambas masas eran lo
suficientemente altos como para suprimir la rama de interacción mutua y así formar una sola masa
concentrada. Sin embargo, cabe la posibilidad de que consideremos que esta rama mutua sí es
importante, al menos bastante más que el tramo correspondiente a la inercia y el amortiguamiento
propio del buje. Es decir, cabe la posibilidad de que eliminando este tramo (despreciando tanto inercia
del buje, Hb como amortiguamiento propio, Db) obtengamos unos resultados más satisfactorios que
suponiendo una alta rigidez y amortiguamiento entre palas y buje.
En caso de que tomásemos la opción de despreciar la inercia y el amortiguamiento del buje
(ambos muy cercanos a 0) nos quedarían dos ramas en paralelo correspondientes a las elasticidades y
amortiguamientos mutuos entre Palas-Buje y Buje-Generador correspondientes al modelo de 3 masas.

74
FIGURA 4.7 DESCRIPCIÓN DEL SISTEMA MECÁNICO MEDIANTE UN CIRCUITO ELÉCTRICO
ANÁLOGO PARA EL PASO DESDE UN MODELO DE 3 MASAS A UNO DE 2 MASAS SIN DESPRECIAR LA
RAMA DE UNIÓN PALAS-BUJE EN DETRIMENTO DE LA INERCIA Y EL AMORTIGUAMIENTO DEL
BUJE
Como se puede observar en la Figura 4.7 las dos ramas quedan en paralelo, por lo que se
puede obtener una constante de rigidez equivalente para la unión Turbina-Generador. Esta
equivalencia viene dada por la siguiente expresión como se explica en [25] y [27] (ante dos
condensadores en paralelo, sus capacidades se suman):
1
𝐾𝑒𝑞=1
𝐾𝑇𝐺=1
𝐾𝐵𝐻+1
𝐾𝐻𝐺 ⇒ 𝐾𝑒𝑞 =
𝐾𝐵𝐻 · 𝐾𝐻𝐺𝐾𝐵𝐻 + 𝐾𝐻𝐺
= 𝐾𝑇
Lo mismo hacemos con las constantes de amortiguación mutua (paralelo de dos resistencias):
1
𝐷𝑒𝑞=1
𝐷𝑇𝐺=1
𝐷𝐵𝐻+1
𝐷𝐻𝐺 ⇒ 𝐷𝑒𝑞 =
𝐷𝐵𝐻 · 𝐷𝐻𝐺𝐷𝐵𝐻 + 𝐷𝐻𝐺
= 𝐷𝑇
Donde todos los parámetros están referidos al eje de alta velocidad (al lado del generador de
la caja multiplicadora).
Nótese también que la inercia de la masa que llamamos turbina (formada por la unión de las
palas y el buje) la pondremos igual a la de las palas (𝐻𝑇 = 𝐻𝐵), cumpliendo de forma estricta el
circuito de la Figura 4.7. Lo mismo ocurre con el amortiguamiento de la turbina (𝐷𝑇 = 𝐷𝐵).
Este caso, en comparación con el anteriormente expuesto, será tratado en el siguiente capítulo,
con objeto de utilizar en las simulaciones el modelo de dos masas que más se acerque en
comportamiento al de 3 masas del que fue obtenido.

75
Capítulo 5
ESTABILIDAD TRANSITORIA
5.1 Introducción
En este Capítulo estudiaremos los distintos comportamientos de nuestros modelos mecánicos,
anteriormente expuestos, de 3, 2 y 1 masa ante diversas perturbaciones en el sistema. Nuestras señales
de entrada serán las tensiones de la red a la que está conectada nuestra turbina eólica y la velocidad
del viento, y van a ser las que alteraremos para producir esas perturbaciones y ver cómo se comportan
las señales de salida, a saber, velocidades, potencias activa y reactiva, ángulo de Pitch de las palas,
etc.
FIGURA 5.1 SISTEMA DE TRES MASAS PALAS-BUJE-GENERADOR CON SUS ENTRADAS Y SALIDAS.
Con objeto de continuar por la senda que trazamos en el capítulo anterior, vamos a realizar
una serie de pruebas en las que le aplicaremos a la turbina una entrada de viento pulsante, simulando
ráfagas de viento, para poder basar empíricamente y tomar una decisión acertada sobre qué modelo de
dos masas es el más conveniente utilizar, si el correspondiente a despreciar la rama elástica mutua
entre palas y buje, o si por el contrario, es más acertado despreciar la inercia y pérdidas por rozamiento
del buje, lo que nos llevaría a encontrarnos con las dos ramas mutuas del modelo de 3 masas en
paralelo, como vimos anteriormente explicado en la analogía electro-mecánica.

76
Antes de nada vamos a concretar los aspectos numéricos de nuestro aerogenerador,
empezando por los parámetros de la máquina eléctrica doblemente alimentada, obtenidos de [22]:
TABLA 5.1 PARÁMETROS DE LA MÁQUINA ELÉCTRICA DOBLEMENTE ALIMENTADA.
Un,estátor = 575 V Un,rotor = 1975 V Pn = 1500 kW
Rs = 0.023 p.u. Rr’ = 0.016 p.u. fn = 60 Hz, p=3
Lσs = 0.18 p.u. Lσr’ = 0.16 p.u. Lm = 2.9 p.u.
A continuación, se muestra en la siguiente tabla los valores nominales y parámetros de la
turbina eólica, extraídos de [28] y de MATLAB:
TABLA 5.2 PARÁMETROS DE LA TURBINA EÓLICA.
DRotor = 82 m ωn,Blades = 16.7 r.p.m. Nivel ruido: 105 dBA
Vviento,mín = 6 m/s Vviento,máx = 25 m/s Pn = 1500 kW
Altura Buje: 90 m Peso Buje: 15.2 t Peso Góndola: 52.3 t
Para las posteriores simulaciones utilizaremos un aerogenerador que, en su modelo de 3
masas, consta de los siguientes parámetros mecánicos, basándonos en [22], [25] y [27]:
TABLA 5.3 PARÁMETROS MECÁNICOS DEL AEROGENERADOR EN UN MODELO DE TRES MASAS.
HBlades = 4 s HHub = 0.32 s HGenerator = 0.685 s
DBlades = 0.0099 p.u. DHub = 0.0001 p.u. DGenerator = 0.01 p.u.
KBlades-Hub = 4.27 p.u. KHub-Generator = 1.5 p.u.

77
DBlades-Hub = 4.5 p.u. DHub-Generator = 1.5 p.u.
5.2 Comprobación de la validez de las variantes presentadas de
los modelos de dos masas.
El viento es una de las entradas que tiene nuestro sistema, y sin duda, la más variable de todas
ellas, debido a que estamos hablando de un fenómeno meteorológico sobre el cual podemos hacer
nuestras predicciones, pero no garantizar la fiabilidad de las mismas. Por ello hemos decidido realizar
algunas simulaciones con una entrada de viento variable mediante pulsos de distinta amplitud, los
cuales equivaldrían a las ráfagas de viento, para ver cómo se comporta el sistema.
Con esta comprobación podremos estudiar, además, qué modelo de dos masas se asemeja en
mayor medida al comportamiento del modelo de 3 masas del que se partía.
En primer lugar vamos a realizar una simulación en un día en el que el viento base sea de 10
m/s, unos 20 nudos y aparezca de pronto una racha de velocidad hasta 20 m/s y duración 1s,
equivalente a unos 40 nudos.2 Hemos modelado la ráfaga de viento como una pulsación de altura 10
m/s respecto la base.
2 El nudo es una medida de velocidad utilizada tanto para navegación marítima como aérea. Equivale a recorrer una
milla náutica en 1 hora. Su conversión a unidades del S.I. es: 1 nudo = 0.5144 m/s.

78
FIGURA 5.2 CARACTERÍSTICA DE LA CURVA DE VIENTO QUE CORRESPONDE A UNA DE LAS
ENTRADAS DEL SISTEMA.
Ahora iremos viendo y analizando una por una, las respuestas de las principales magnitudes
del sistema ante esta entrada escalón. En las siguientes simulaciones se representarán distintos
modelos de 3 masas, cambiando sus parámetros en función de los que consideremos menos
influyentes:
Modelo 1: está formado por los parámetros representados en la tabla anterior. Es el modelo
que contiene los valores originales de los parámetros, y al que querrán acercarse los otros dos
modelos simplificados.
Modelo 2: se considerará que la inercia y el amortiguamiento propio del buje son
despreciables, por lo que se realizará la simulación con un valor nulo de los mismos (𝐻𝐻 = 0
y 𝐷𝐻 = 0). De esta forma, nos quedarían las dos ramas mutuas en paralelo (ver Figura 4.7),
como se explicó en la analogía eléctrica, obteniendo los siguientes parámetros para el modelo
de dos masas:
𝐾𝑒𝑞 =𝐾𝐵𝐻 · 𝐾𝐻𝐺𝐾𝐵𝐻 + 𝐾𝐻𝐺
=4.27 · 1.5
4.27 + 1.5= 𝐾𝑇𝐺 = 1.11
𝐷𝑒𝑞 =𝐷𝐵𝐻 · 𝐷𝐻𝐺𝐷𝐵𝐻 + 𝐷𝐻𝐺
=4.5 · 1.5
4.5 + 1.5= 𝐷𝑇𝐺 = 1.125

79
𝐻𝑇 = 𝐻𝐵 = 4
𝐷𝑇 = 𝐷𝐵 = 0.0099
Modelo 3: en este caso se considera que la unión palas-buje es totalmente rígida (no presenta
elasticidad), lo que significa que debemos asignar un valor muy elevado a la constante elástica
y a la de amortiguamiento Palas-Buje (𝐾𝐵𝐻 = 1000 y 𝐷𝐵𝐻 = 1000 ). De esta forma,
tendríamos las inercias y los amortiguamientos propios de las palas y el buje en serie, y los
parámetros del modelo de dos masas resultante serían:
𝐻𝑇 = 𝐻𝐵 +𝐻𝐻 = 4.32
𝐷𝑇 = 𝐷𝐵 + 𝐷𝐻 = 0.01
𝐾𝑇𝐺 = 𝐾𝐻𝐺 = 1.5
𝐷𝑇𝐺 = 𝐷𝐻𝐺 = 1.5
A continuación, mostramos la comparación del comportamiento dinámico de estos tres
modelos en sus principales magnitudes.
FIGURA 5.3 COMPARACIÓN DEL PAR MECÁNICO TRANSMITIDO DESDE EL BUJE AL GENERADOR,
THG (EN P.U.), ANTE RÁFAGA DE VIENTO DE 20 M/S.

80
En la Figura 5.3 se puede apreciar la respuesta del par transmitido desde el buje al generador,
THG (o desde la masa “Turbina” al generador en los modelos correspondiente de dos masas, TTG).
Analizándola con detenimiento podemos observar que, como es lógico, los modelos simplificados
llamados “Modelo Dos” y “Modelo Tres” tienen la misma respuesta, a pares, tanto en el modelo de 2
masas como en el de 3 masas. Es decir, las curvas azul y naranja (correspondientes al Modelo 2 en el
que despreciamos la inercia y el amortiguamiento propio del buje) coinciden, al igual que lo hacen las
curvas roja y morada (que corresponden con el Modelo 3 en el que se consideró unión rígida entre las
palas y el buje). Esto se ha mostrado para facilitar la comprensión de la explicación dada, pero lo más
interesante de la Figura 5.3 es que la última curva, verde, a la que llamamos Modelo Original, se
corresponde con el modelo de parámetros mecánicos detallados en la Tabla 5.3., y es la curva a la que
las demás deberían asemejarse. Por tanto, se puede concluir con esto que el comportamiento dinámico
transitorio del Modelo 2, en el que se desprecian la inercia y el amortiguamiento del buje, es mucho
más parecido al sistema original de 3 masas que el Modelo 3, resultado de haber considerado
totalmente rígida la unión Palas-Buje. Veamos ahora el comportamiento de la velocidad del generador
ante esta entrada de viento:
FIGURA 5.4 COMPARACIÓN DE LA VELOCIDAD DEL ROTOR DEL GENERADOR (EN P.U.) ANTE
RÁFAGA DE VIENTO DE 20 M/ S.
En la Figura 5.4 se pueden observar las distintas respuestas de la velocidad del rotor para los
modelos antes expuestos (excluyendo los de 2 masas para mejor visualización), resultando, al igual
que ocurría con el par mecánico en el eje del generador, que el Modelo 2 es el que más se acerca al

81
comportamiento del Modelo Original de 3 masas, ya que, como vemos, sus trayectorias son muy
similares y prácticamente paralelas.
FIGURA 5.5 COMPARACIÓN DE POTENCIA ACTIVA (EN MW) ANTE RÁFAGA DE VIENTO DE 20 M/S.
Por último, se muestra en la Figura 5.5 la comparación de la potencia activa entregada a la
red para los distintos modelos simulados. Observamos que, aunque con algunas diferencias, las
trayectorias descritas por las curvas azul y amarilla vuelven a parecerse bastante a la trayectoria de la
curva verde, y se puede concluir, por tanto, que el Modelo 2 es el que más se asemeja a nuestro sistema
de 3 masas original. Por este motivo, las gráficas comparativas que mostraremos a aquí en adelante,
serán simulaciones de los distintos modelos de 3, 2 y 1 masas, habiendo utilizado como modelo de 2
masas el correspondiente a despreciar los valores de la inercia y el amortiguamiento del buje del
aerogenerador.
5.3 Respuesta transitoria del sistema ante una variación en la
velocidad del viento.
Proponemos ahora una simulación en una situación atmosférica concreta, suponiendo que un
día se diesen vientos intermitentes con rachas de 20 m/s, equivalente a unos 40 nudos, de 2 segundos

82
de duración, y que se repitan en un período de 5 segundos. Hemos modelado las ráfagas de viento
como pulsaciones de altura 10 m/s desde referencia 10 m/s, tal como se muestra en la Figura 5.6.
FIGURA 5.6 CARACTERÍSTICA DE LA VELOCIDAD DEL VIENTO (EN M/S) QUE INCIDE EN LAS PALAS
DEL AEROGENERADOR.
Mostraremos de nuevo las respuestas de las principales magnitudes ante esta variación del
viento, para que podamos hacer diferenciación en el comportamiento de los distintos modelos
mecánicos.

83
5.3.1 Tensiones en bornes de la máquina eléctrica.
FIGURA 5.7 TENSIONES EN BORNES DE LA MÁQUINA ELÉCTRICA (EN P.U.) ANTE RÁFAGAS DE
VIENTO DE 20 M/S.
Como podemos comprobar en la Figura 5.7 , la tensión en bornes de la máquina eléctrica
permanece constante, sin verse alterada por la variación del viento. Sin embargo, aunque no se pueda
apreciar prácticamente en la gráfica, su valor es exactamente 1.025 p.u., debido a que la máquina se
encuentra en modo de regulación de potencia reactiva, y, por tanto, para mantener ésta última con
valor nulo, se necesita este incremento de un 2% de la tensión en bornes del generador.

84
5.3.2 Intensidades en bornes de la máquina eléctrica.
FIGURA 5.8 COMPARACIÓN DE INTENSIDADES EN BORNES DE LA MÁQUINA ELÉCTRICA (EN P.U.)
ANTE RÁFAGAS DE VIENTO DE 20 M/S.
No así las intensidades inyectadas a la red por el generador, las cuales presentan una clara
influencia de la variación de la velocidad del viento. Necesariamente tenían éstas que incrementarse
para que la potencia entregada a la red también aumentase, como veremos a continuación.

85
5.3.3 Potencias activa y reactiva del aerogenerador.
FIGURA 5.9 COMPARACIÓN DE POTENCIA ACTIVA (EN MW) ANTE RÁFAGAS DE VIENTO DE 20
M/S.
Podemos apreciar el parecido claro entre las potencias generadas por el sistema de 2 masas y
el de 3 masas, excepto en el tramo “valle”, momento en el que disminuye el par entregado por el viento
y la potencia tiende a regresar al estado en el que se encontraba antes de la perturbación, debido
fundamentalmente a la pequeña diferencia entre las inercias de los dos sistemas, resultado de
despreciar la inercia del buje. La potencia activa del modelo de una masa difiere en gran medida, sin
embargo, de las otras dos. Describe una curva de potencia mucho más simplificada, en la que se pierde
importante información, mientras que los modelos más complejos nos brindan una descripción más
cercana a la realidad.

86
FIGURA 5.10 COMPARACIÓN DE POTENCIA REACTIVA (EN MVAR) ANTE RÁFAGAS DE VIENTO DE
20 M/S.
En la Figura 5.10 se puede apreciar como antes de que se introdujese la primera ráfaga de
viento (segundo 1), el sistema se encontraba en régimen permanente, y el consumo de potencia reactiva
era nulo, gracias al control de nuestro convertidor que es capaz de separar la generación de potencia
activa del consumo de reactiva. A partir del comienzo de las ráfagas de viento se produce una variación
negativa en la curva de la potencia reactiva, lo que nos indica que se está empezando a inyectar reactiva
en la red. Pero en el momento que deja de aplicarse el pulso correspondiente a la ráfaga de viento se
produce un efecto rebote y el generador pasa a consumir potencia reactiva durante un período de unos
dos segundos. Esta situación es transitoria debido a la variación brusca del viento, pero tendería a
estabilizarse de nuevo como es lógico en un consumo nulo de reactiva si no se siguieran aplicando
continuas ráfagas cada 5 segundos.

87
5.3.4 Velocidades del sistema.
FIGURA 5.11 COMPARACIÓN DE VELOCIDADES (EN P.U.) DE LAS DISTINTAS MASAS MODELADAS
EN EL SISTEMA ANTE RÁFAGAS DE VIENTO DE 20 M/S.
Como podemos observar en la Figura 5.11 las velocidades de las distintas masas del sistema,
e incluso entre los distintos modelos mecánicos, son bastante similares. Si nos fijamos especialmente
en la velocidad del rotor del generador se puede apreciar una diferencia considerable en el transitorio
de los modelos de 2 y 3 masas respecto al de 1 masa. Nótese que, como es lógico, deben coincidir las
3 velocidades para el modelo de 1 masa, mientras que para el modelo de 2 masas deben ser idénticas
las de las palas y del buje, por ser la misma masa.

88
5.3.5 Pares del sistema.
FIGURA 5.12 COMPARACIÓN DE LOS DIFERENTES PARES QUE INTERVIENEN EN EL MODELO DE LA
TURBINA EÓLICA (EN P.U.) ANTE RÁFAGAS DE VIENTO DE 20 M/S.
De la Figura 5.12 podemos sacar varias conclusiones. Una de ellas podría ser que el modelo
de 1 masa es ineficaz para informarnos acerca de los distintos pares que se transmiten entre los
elementos de un aerogenerador. Como se puede ver, también lo es el modelo de 2 masas si buscamos
información concreta sobre el par transmitido al buje (por formar una única masa junto con las palas),
pero sí es eficaz y, de hecho, muy exacto indicándonos el par transmitido al eje del generador, ya que
coincide totalmente, a simple vista, con el del modelo de 3 masas. Por último, vemos que el par
electromagnético es bastante parecido en los modelos de 2 y 3 masas, siendo de nuevo éstos los más
realistas.
5.3.6 Ángulo de Pitch.
Es interesante analizar la Figura 5.13 para poder entender de manera bastante visual la
actuación del control del ángulo de pitch de las palas ante un cambio repentino y brusco en la entrada
de viento.

89
FIGURA 5.13 COMPARACIÓN DEL ÁNGULO DE PITCH (DE PASO) DE LAS PALAS (EN GRADOS) ANTE
RÁFAGAS DE VIENTO DE 20 M/S.
Es fácilmente observable que las pendientes crecientes de la curva de Pitch se corresponden
con los instantes en que se producen las ráfagas de viento e interactúan con el sistema. Esto se produce
para intentar mantener a la turbina a una velocidad deseable y no dejar que se embale
incontroladamente ante la acción de un viento racheado, lo que produciría cargas indeseables en los
elementos mecánicos del aerogenerador. Cuando el ángulo de paso de la pala se incrementa, esto
quiere decir que se va a desaprovechar parte de la energía eólica que poseía el viento para, de esa
manera, mantener la turbina en un rango controlado de velocidades y produciendo una potencia que
tenderá a estar en torno a la nominal. Asimismo, es igual de evidente que, cuando dejan de soplar las
ráfagas de viento, vuelve a decrecer la curva de Pitch, es decir, vuelve a orientarse la pala a 0 grados
respecto el viento incidente para aprovechar al máximo su potencia eólica y obtener un rendimiento
óptimo.
5.4 Respuesta del sistema ante una perturbación límite en la
velocidad del viento.
Vamos a llevar nuestra turbina eólica hasta uno de los extremos posibles, introduciéndole una
entrada escalón correspondiente a un incremento de la velocidad del viento hasta los 30 m/s

90
(equivalente aproximadamente a 60 nudos). Veremos cómo se comporta aportando demostraciones
graficas de las respuestas de distintas magnitudes, como en el caso anterior. La entrada de viento
aplicada se muestra en la Figura 5.14:
FIGURA 5.14 CARACTERÍSTICA DE LA VELOCIDAD DEL VIENTO (EN M/S) QUE INCIDE EN LAS
PALAS DEL AEROGENERADOR.
5.4.1 Tensiones en bornes de la máquina eléctrica.
FIGURA 5.15 TENSIONES EN BORNES DE LA MÁQUINA ELÉCTRICA (EN P.U.) ANTE RÁFAGAS DE
VIENTO DE 20 M/S

91
Como podemos ver en la Figura 5.15, las tensiones de la máquina eléctrica no presentan
variación alguna, a pesar de la fuerte carga de viento introducida en el aerogenerador, y esto es debido
al apoyo que recibe de la red, suficientemente robusta como para mantener la tensión en ese punto
constante.
5.4.2 Intensidades en bornes de la máquina eléctrica.
FIGURA 5.16 COMPARACIÓN DE INTENSIDADES EN BORNES DE LA MÁQUINA ELÉCTRICA (EN P.U.)
ANTE ENTRADA ESCALÓN DE LA VELOCIDAD DEL VIENTO DE HASTA 30 M/S.
En la Figura 5.16, tras aguantar aparentemente estable durante un par de segundos, sí se puede
apreciar un claro comportamiento oscilatorio, transcurridos menos de 5 segundos desde la
perturbación producida por el viento. Esto puede indicarnos que se ha llegado al límite de la máquina
y que, de seguir en funcionamiento continuo a este régimen, podrían dañarse los devanados de la
máquina eléctrica, tanto los del estátor como los del rotor.
Es necesario comentar que a estas velocidades los aerogeneradores suelen estar programados
para que dejen de funcionar, y así impedir que se produzcan grandes esfuerzos que puedan dañar los
elementos mecánicos, así como evitar que se dañen los circuitos eléctricos del generador y los
elementos electrónicos.

92
5.4.3 Potencias activa y reactiva del aerogenerador.
Lo mismo ocurre con la potencia activa inyectada a la red, que se vuelve muy oscilante (Figura
5.17) y puede producir perturbaciones en la red debido a estas grandes variaciones. Además, como
podemos ver, se sobrepasa en gran medida la potencia nominal de la turbina eólica y de la máquina
eléctrica, poniendo en riesgo la integridad de los componentes mecánicos y eléctricos del
aerogenerador.
FIGURA 5.17 COMPARACIÓN DE POTENCIA ACTIVA (EN MW) ANTE ENTRADA ESCALÓN DE LA
VELOCIDAD DEL VIENTO DE HASTA 30 M/S.
En la potencia reactiva, sin embargo, no se aprecia de la misma forma la oscilación que se
produce en la gráfica de potencia activa, y vemos que tiende a volver a cero de nuevo. Esto es gracias
al control independiente de las potencias activa y reactiva, y la actuación del sistema en modo de
regulación de potencia reactiva.

93
FIGURA 5.18 COMPARACIÓN DE POTENCIA REACTIVA (EN MVAR) ANTE ENTRADA ESCALÓN DE
LA VELOCIDAD DEL VIENTO DE HASTA 30 M/S.
5.4.4 Velocidades del sistema.
En la vemos como las velocidades están estables, y que, gracias a la acción del control de
ángulo de Pitch, no se han elevado más. Lo cual no quita que se hayan superado velocidades de 1.5
p.u., lo cual puede poner en peligro, como ya hemos dicho antes, todos los elementos mecánicos de la
turbina eólica. Además, el sistema tiende a estabilizarse, pero quedándose a una velocidad de 1.35 p.u.

94
FIGURA 5.19 COMPARACIÓN DE LAS DISTINTAS VELOCIDADES DEL SISTEMA (EN P.U.) ANTE
ENTRADA ESCALÓN DE LA VELOCIDAD DEL VIENTO DE HASTA 30 M/S.
También comentar, por cierto, la buena y precisa aproximación del modelo de 2 masas
respecto al de 3 masas, incluso en condiciones límite.

95
5.4.5 Pares del sistema.
FIGURA 5.20 COMPARACIÓN DE LOS DISTINTOS PARES DEL SISTEMA (EN P.U.) ANTE ENTRADA
ESCALÓN DE LA VELOCIDAD DEL VIENTO DE HASTA 30 M/S.
En las gráficas del par podemos apreciar las oscilaciones que se producían en las curvas de
potencia activa, exceptuando al modelo de 1 masa, el cual se vuelve estable a los pocos segundos de
que se produjese el escalón, despreciando resultados interesantes del transitorio mecánico. Además,
se observa que los pares son enormes, sobre todo en las palas, donde se llegan a alcanzar los 3.5 p.u.,
a pesar del esfuerzo del control de Pitch por intentar reducir la captación de viento, como veremos a
continuación.
5.4.6 Ángulo de Pitch.
En la Figura 5.21 podemos visualizar el ángulo de Pitch de las palas, gracias al cual se ha
podido controlar, al menos en parte, la velocidad de la turbina y del generador, por consiguiente.
Se observa, asimismo, como el ángulo límite de paso de las palas es igual a 27˚, valor que
venía definido en el modelo en Matlab-Simulink. Además, se ha definido la velocidad de variación
del ángulo de Pitch igual a 10˚/s, lo que retrasa la acción del control para conseguir reducir la velocidad
de la turbina, el par transferido en ella y, así, poder controlar la potencia entregada a la red.

96
FIGURA 5.21 COMPARACIÓN DEL ÁNGULO DE PASO DE LAS PALAS (EN GRADOS) ANTE ENTRADA
ESCALÓN DE LA VELOCIDAD DEL VIENTO DE HASTA 30 M/S.
Como podemos observar, el ángulo de paso, en estas condiciones de viento, está en el límite
y no se puede incrementar más, lo que nos impide tener más control sobre la velocidad de la turbina.
5.4.7 Ángulo de retraso (lead-lag) de las palas respecto a su eje longitudinal.
Para mostrar la importancia de estos efectos en las turbinas eólicas, vamos a mostrar la
evolución del ángulo θbh, esto es, el ángulo que se produce por efecto del rozamiento de las palas con
el viento, especialmente en la zona cercana a la punta.
Este ángulo es el que forman las palas al retrasarse (de ahí su nombre), por la acción del
rozamiento con el viento, respecto de su eje longitudinal. En la Figura 5.22 se muestran las fuerzas
actuantes sobre las palas de un aerogenerador.
Entre ellas se encuentran los esfuerzos de torsión, producidos sobre el mismo eje de la pala;
el batimiento, debido a la acción del viento que flexiona la pala en su misma dirección; y, por último,
el arrastre, flexión producida por el movimiento de la pala en un sentido dado y el rozamiento que se
produce con el aire. Estas fuerzas tienen sus distribuciones concretas a lo largo de la pala, según la
aerodinámica de la misma y el sentido exacto del viento incidente, pero se puede considerar una
flexión uniforme en toda la pala, o, incluso, una flexión debida a una fuerza aplicada en el extremo de
la pala, actuando esta como una viga en voladizo, todo ello para mayor simplicidad.

97
FIGURA 5.22 FUERZAS ACTUANTES SOBRE LAS PALAS DEL AEROGENERADOR.
FIGURA 5.23 ÁNGULO THETABH (EN RAD) QUE FORMAN LAS PALAS CON SU PROPIO EJE
LONGITUDINAL DEBIDO AL ROZAMIENTO PRODUCIDO POR LA ACCIÓN DEL VIENTO.

98
El ángulo θBH se ha visto, por tanto, afectado en gran medida por esta variación brusca del
viento, llegando a alcanzar casi los 0.45 rad, lo que equivale a unos 25˚ de desfase respecto su propio
eje. Sin duda, aunque las palas están diseñadas con gran elasticidad para hacer frente a las posibles
sobrecargas producidas por el viento, es importante estar atento a estas magnitudes para evitar alcanzar
los límites elásticos del material y que se pueda producir una fractura de la pala.
Por supuesto, esta información sólo es posible si disponemos de un modelo de 3 masas (o
superior), separando las palas y el buje, ya que, como es obvio, en los modelos de 1 ó 2 masas no es
posible realizar este estudio sobre el ángulo de retraso por encontrarse ambas masas unidas
rígidamente.
5.5 Comportamiento del sistema ante una variación del viento
en modo subsíncrono
Hasta ahora hemos estudiado el comportamiento de la turbina eólica con el generador
funcionando en modo supersíncrono, pero no funcionando por debajo de la velocidad de sincronismo.
Veamos algunas de las magnitudes principales del aerogenerador para observar su
comportamiento cuando la máquina eléctrica se encuentra trabajando por debajo de la velocidad de
sincronismo, con una velocidad del viento de 8 m/s, y se le aplica un escalón de hasta 12 m/s.
FIGURA 5.24 CARACTERÍSTICA DE LA VELOCIDAD DEL VIENTO (EN M/S) QUE INCIDE EN LAS
PALAS DEL AEROGENERADOR.

99
5.5.1 Velocidades del sistema.
En la Figura 5.25 se pueden observar las velocidades de las masas del sistema, para los 3
modelos mecánicos considerados, que, como vemos, son prácticamente idénticas.
Es interesante apreciar que, para una velocidad del viento de 8 m/s, el funcionamiento del
aerogenerador es en modo subsíncrono (con una velocidad angular en torno a 0.85 p.u.). Sin embargo,
cuando la velocidad del viento aumenta hasta 12 m/s, la velocidad de la turbina también lo hace,
acercándose hasta 1.2 p.u. Por lo tanto, se encuentra ahora en funcionamiento supersíncrono, con una
velocidad superior a ωs, y un deslizamiento negativo. Aproximadamente, a los 7 segundos se produce
el paso de un modo de funcionamiento a otro, momento en el que la velocidad es igual a la de
sincronismo (1 p.u.).
FIGURA 5.25 COMPARACIÓN DE LAS VELOCIDADES DEL SISTEMA (EN P.U.) ANTE ENTRADA
ESCALÓN DE LA VELOCIDAD DEL VIENTO DE 8 A 12 M/S.
5.5.2 Intensidades de la máquina eléctrica.
Como se puede ver en la Figura 5.26, las intensidades entregadas a la red parten de unos
valores muy bajos (0.25 p.u.) para una velocidad de viento de 8 m/s, y aumentan paulatinamente
debido a la perturbación introducida en el sistema (hasta que se estabilicen en torno a 0.8 p.u.). Apenas
se aprecian diferencias entre los distintos modelos mecánicos.

100
FIGURA 5.26 COMPARACIÓN DE INTENSIDADES EN BORNES DE LA MÁQUINA ELÉCTRICA (EN P.U.)
ANTE ENTRADA ESCALÓN DE LA VELOCIDAD DEL VIENTO DE 8 A 12 M/S.
Además, es sumamente interesante mostrar el comportamiento de las intensidades del estátor
y del rotor del generador, por separado. Se puede observar en la Figura 5.27, que las intensidades del
estátor de la máquina son crecientes debido a la perturbación del viento, lo que indica que está
aumentando el flujo de potencia a través del estátor hacia la red.
También son crecientes las intensidades del rotor, pero con una importante diferencia. En el
momento en que se produce el cambio del modo de operación, paso de modo subsíncrono a modo
supersíncrono, se produce un cambio de polaridad en las intensidades del rotor, como se puede apreciar
en torno al segundo 7 en la Figura 5.27. Esto significa que, mientras que la potencia, en modo
subsíncrono, fluía de la red hacia el rotor del generador, cumpliendo la ecuación que ya habíamos
analizado:
𝑃𝑚 =∑𝑃é𝑟𝑑𝑖𝑑𝑎𝑠 + 𝑃𝑠 − 𝑃𝑟
Cuando la máquina trabaja en modo supersíncrono, las intensidades cambian de signo, y, por
tanto, el flujo de potencia cambia de sentido, inyectando potencia activa en la red, a través del rotor:
𝑃𝑚 =∑𝑃é𝑟𝑑𝑖𝑑𝑎𝑠 + 𝑃𝑠 + 𝑃𝑟
Otra forma de expresar el signo de estas potencias era mediante el deslizamiento. Según la
expresión que habíamos deducido anteriormente (en modo generación):
𝑃𝑟 = −𝑠𝑃𝑠

101
Dado que, cuando la máquina funciona a una velocidad inferior a la de sincronismo, el
deslizamiento es positivo, la potencia del rotor (absorbida) será de signo contrario a la del estátor
(inyectada). En cambio, cuando la máquina funciona en régimen supersíncrono, el deslizamiento es
negativo, y, por tanto, la potencia del rotor tendrá el mismo signo que la del estátor (inyectadas).
FIGURA 5.27 INTENSIDADES DEL ESTÁTOR Y DEL ROTOR DE LA MÁQUINA ELÉCTRICA (EN P.U.)
PARA EL MODELO DE 3 MASAS, ANTE ENTRADA ESCALÓN DE LA VELOCIDAD DEL VIENTO DE 8 A
12 M/S.
Nótese, además, que se cumple:
𝑓𝑟 = |𝑠| · 𝑓
Ya que, cuanto más se aproxima la velocidad del generador a la de sincronismo (𝑠~0), la
frecuencia de las corrientes del rotor disminuyen en gran medida.
Comentar además, que las intensidades de la Figura 5.27 están referidas a distintas tensiones
a la hora de normalizarlas. Es decir, con la intensidad del estátor se ha utilizado la tensión nominal del
estátor para pasarla a p.u., mientras que con la intensidad del rotor se ha usado la tensión nominal del
rotor.
5.5.3 Potencia activa del aerogenerador.
En la Figura 5.28 se aprecia un aumento considerable de la potencia activa, pasando desde
0.4 MW generados para una velocidad del viento de 8 m/s hasta más de 1.1 MW para 12 m/s, ya que

102
como vemos continúan subiendo las curvas para los 3 modelos mecánicos. Se observa de nuevo un
comportamiento idéntico para los modelos de 2 y 3 masas.
FIGURA 5.28 COMPARACIÓN DE POTENCIA ACTIVA GENERADA (EN MW) ANTE ENTRADA
ESCALÓN DE LA VELOCIDAD DEL VIENTO DE 8 A 12 M/S.
5.5.4 Pares del sistema.
Los pares que se transmiten por la turbina eólica son moderados, y, como se aprecia en la
Figura 5.29, son mucho más amortiguados en el modelo de 2 y 3 masas que en el de 1 masa, en el cual
se produce una respuesta mucho más agresiva, sin apenas oscilación, quedándose el par prácticamente
constante a los dos segundos de producirse la perturbación, en torno a 0.7 p.u.

103
FIGURA 5.29 COMPARACIÓN DE LOS PARES DEL SISTEMA (EN P.U.) ANTE ENTRADA ESCALÓN DE
LA VELOCIDAD DEL VIENTO DE 8 A 12 M/S.
5.5.5 Ángulo de Pitch.
En la gráfica del Pitch, vemos como el ángulo aumenta hasta casi 5˚ debido al escalón de
viento introducido, para controlar el par que se transmite en la turbina, pero luego disminuye
paulatinamente para volver a valores muy bajos, posiblemente nulos cuando se estabilice.

104
FIGURA 5.30 COMPARACIÓN DE LA VARIACIÓN DEL ÁNGULO DE PITCH DE LAS PALAS (EN
GRADOS) ANTE ENTRADA ESCALÓN DE LA VELOCIDAD DEL VIENTO DE 8 A 12 M/S.
5.6 Respuesta ante hueco de tensión de REE
En la actualidad, los sistemas eléctricos de potencia están evolucionando para incorporar
adecuadamente la generación agregada por parte de las energías renovables, sin que produzcan ningún
tipo de inestabilidad en la red. Con este fin, los operadores del sistema han tenido que desarrollar
procedimientos de operación (P.O.) que establecen las condiciones a cumplir por los nuevos
generadores, de forma que su incorporación no afecte a la seguridad y fiabilidad del sistema.
En nuestro país, el operador del sistema es Red Eléctrica de España, y regula el
funcionamiento de la red de transporte mediante los P.O. Los principales procedimientos de operación
que afectan a la conexión y funcionamiento de los parques eólicos son:
P.O. 3.7 Programación de la generación renovable no gestionable.
P.O. 12.1 Solicitudes de acceso para la conexión de nuevas instalaciones a la red de transporte.
P.O. 12.2. Instalaciones conectadas a la red de transporte: Requisitos mínimos de diseño,
equipamiento, funcionamiento y seguridad y puesta en servicio.
P.O. 12.3. Requisitos de respuesta frente a huecos de tensión de las instalaciones eólicas.

105
Nos vamos a centrar a fondo en este último procedimiento. Un hueco de tensión es una
disminución transitoria de la tensión de alimentación del sistema que puede ser provocada, bien por
cortocircuitos y fallos en el sistema hasta que son despejados, o por el arranque de motores cercanos,
cuyo gran consumo de intensidad provoca grandes caídas de tensión en las redes de alimentación.
Según el P.O. 12.3 de REE [29], la instalación de producción de energía y todos sus
componentes deberán ser capaces de soportar sin desconexión huecos de tensión, en el punto de
conexión a la red, producidos por cortocircuitos trifásicos, bifásicos a tierra o monofásicos, con los
perfiles de magnitud y duración indicados en la Figura 5.31. Es decir, no se producirán desconexiones
de la instalación para huecos de tensión en el punto de conexión a la red incluidos en el área sombreada
de esta figura. En el caso de cortocircuitos bifásicos aislados de tierra, la curva de hueco de tensión
será la misma que para los casos anteriores, con la diferencia de que el valor del límite inferior de
tensión es 0.6 p.u., en lugar de 0.2 p.u.
Teniendo en cuenta el Procedimiento de Operación exigido por Red Eléctrica de España,
procedemos a comprobar que el sistema cumpla los requerimientos y a comparar las simulaciones
realizadas para cada uno de los 3 modelos, aplicando a nuestro aerogenerador un cortocircuito trifásico
en el punto de conexión a la red.
A continuación se muestran en la Figura 5.31 la forma de onda que debería tener la tensión
tal y como se detalla en el BOE (P.O. 12.3 Requisitos de respuesta frente a huecos de tensión de las
instalaciones eólicas), y la que se ha definido para realizar la simulación (Figura 5.33), la cual está
formada únicamente por escalones de distinta amplitud, y no contiene rampas como la que define el
BOE. Sin embargo, es incluso más restrictiva que la exigida por REE.
FIGURA 5.31 FORMA DE ONDA DE LA TENSIÓN REQUERIDA POR REE EN EL PROCEDIMIENTO DE
OPERACIÓN FRENTE A HUECOS DE TENSIÓN DE LAS INSTALACIONES EÓLICAS.

106
Para faltas trifásicas equilibradas, como las que se analizarán en este trabajo, no podrá existir
consumo de potencia activa por parte de la instalación, tanto durante el período de mantenimiento de
la falta, como durante el período de recuperación de la tensión posterior. Se admite, sin embargo, la
existencia de consumos puntuales durante los 150 ms inmediatamente posteriores al inicio de la falta
y los 150 ms posteriores al despeje de la misma. Además, se permiten consumos de potencia activa
durante el resto de la falta, siempre que no sean superiores al 10% de su potencia nominal.
Además, tanto durante el período de falta como durante el período de recuperación de tensión
posterior al despeje de la misma, la instalación deberá aportar al sistema eléctrico la máxima intensidad
posible (Itotal). Esta aportación de intensidad por parte de la instalación al sistema eléctrico se efectuará
de forma que el punto de funcionamiento de la instalación se localice dentro del área sombreada en la
Figura 5.32, antes de transcurridos 150 ms desde el inicio de la falta o desde el instante de despeje de
la falta. Así, para tensiones inferiores a 0.85 p.u., en el punto de conexión a la red, la instalación deberá
generar potencia reactiva, mientras que para tensiones comprendidas entre 0.85 p.u. y el valor de la
tensión mínima admisible para la operación normal del sistema eléctrico, la instalación no deberá
consumir potencia reactiva. Para valores de tensión superiores a la tensión mínima admisible en
operación normal aplicará lo establecido en los P.O. para dicha operación normal.
FIGURA 5.32 ÁREA DE FUNCIONAMIENTO ADMISIBLE DURANTE LOS PERÍODOS DE FALTA Y DE
RECUPERACIÓN DE TENSIÓN, EN FUNCIÓN DE LA TENSIÓN EN EL PUNTO DE CONEXIÓN A LA RED.

107
5.6.1 Tensión de la Red.
En nuestra onda de tensión, el valor de la misma cae bruscamente en un cierto instante hasta
0.2 p.u. y se mantiene con ese valor durante 1 s, período que llamaremos crítico. Al cabo de ese tiempo
pasa a tomar un valor de 0.8 en p.u que se mantendrá hasta pasados 14 s, momento en el que se produce
la última recuperación de la onda hasta 0.95 p.u., un valor aceptable de caída de tensión (dentro del
rango de ± 5 %):
FIGURA 5.33 FORMA DE ONDA DE LA TENSIÓN (EN P.U.) UTILIZADA PARA REALIZAR LA
SIMULACIÓN DEL P.O. DE REE.
En el caso de la tensión, el escalón negativo que se ha introducido ha sido el mismo para los
tres modelos mecánicos. Ahora mostraremos las gráficas comparativas de los modelos de 1, 2 y 3
masas para las magnitudes imprescindibles en el análisis del comportamiento de una turbina de viento
que hemos estado representando como hasta ahora.
5.6.2 Intensidades en bornes de la máquina eléctrica.
La intensidad, como vemos, se mantiene estable durante todo el período, exceptuando el
instante en que se producen las variaciones (escalones) de tensión, tanto cuando disminuye como
cuando aumenta se aprecian transitorios con una sobreoscilación muy elevada, pero muy corta.

108
FIGURA 5.34 COMPARACIÓN DE INTENSIDADES (EN P.U.) ANTE HUECO DE TENSIÓN DE REE.
5.6.3 Potencias Activa y Reactiva del aerogenerador.
Como se aprecia en la Figura 5.35, la potencia activa cae bruscamente en el momento que se
produce el hueco de tensión, recuperándose rápidamente cuando la tensión aumenta hasta 0.8 p.u. Se
aprecia cierta oscilación en los modelos de 2 y 3 masas (se comportan de forma muy similar), hasta
que se recupera casi en su totalidad la tensión de la red, momento a partir del cual se produce una
fuerte sobreoscilación que termina por estabilizarse en torno a la potencia nominal de la turbina eólica
(1.5 MW).
FIGURA 5.35 COMPARACIÓN DE POTENCIA ACTIVA (EN MW) ANTE HUECO DE TENSIÓN DE REE.

109
En ningún momento se produce un consumo de potencia activa por parte del aerogenerador,
tal y como nos advertía el P.O. 12.3., sino todo lo contrario, la generación de potencia activa no cesa
de producirse en todo el período que se mantiene el hueco de tensión.
Es interesante comentar el comportamiento de la potencia reactiva (Figura 5.36), ya que en el
momento que se produce el hueco de tensión, no sólo no consume reactiva la instalación, sino que se
produce una aportación de potencia reactiva a la red, lo que favorece la recuperación de la tensión para
devolver estabilidad a la red. Esta aportación continúa, y con mayor valor (cerca de 0.3 MVar) durante
el tiempo que la tensión se encuentra a 0.8 p.u., hasta el segundo 15.5, cuando se recupera la tensión
al 0.95 p.u. (aumentando también la potencia activa generada), y se produce un pequeño consumo de
reactiva durante unos segundos para terminar estabilizándose de nuevo a valores nulos tras un período
oscilatorio, el cual es más pronunciado en el modelo de 1 masa que en los otros dos.
FIGURA 5.36 COMPARACIÓN DE POTENCIA REACTIVA (EN MVAR) ANTE HUECO DE TENSIÓN DE
REE.
Nótese que la aportación de reactiva viene dominada por el controlador, y la mantiene en un
valor constante durante todo el proceso de la falta. Sería necesario retocar los parámetros del
convertidor electrónico para cumplir los requisitos de operación, y aportar más reactiva durante la
falta, como señala REE.

110
FIGURA 5.37 CONTROL DE POTENCIA REACTIVA (EN MVAR) ANTE HUECO DE TENSIÓN DE REE.
Como podemos apreciar en la Figura 5.37, se ha representado el comportamiento del modelo
de 3 masas modificando unos parámetros en el control de las intensidades rotóricas, y hemos
conseguido aumentar significativamente la potencia reactiva inyectada durante el período que dura la
falta. El aporte de reactiva llega a ser de 0.82 MVar durante unos 15 segundos, lo que ayuda a la red
a recuperar su tensión nominal de manera mucho más rápida y eficaz.
5.6.4 Velocidades del sistema.
En primer lugar nos vamos a fijar en la velocidad del rotor del generador, donde podemos
diferenciar los 3 modelos mecánicos. Se aprecia claramente como el modelo de 1 masa tiene una
capacidad de reacción mucho más rápida que los otros modelos. Por el contrario, si observamos los
modelos de 2 de 3 masas, lógicamente, debido a la mayor complejidad de los modelos, vemos que su
sobreoscilación es muy alta, especialmente en el punto crítico del hueco de tensión (U=0.2 p.u.). Esto
significa que la aproximación realizada anteriormente en el modelo de dos masas sigue siendo eficaz
y nos muestra resultados bastante fiables, muy cercanos al modelo de tres masas.

111
FIGURA 5.38 COMPARACIÓN DE VELOCIDADES DE LAS DISTINTAS MASAS MODELADAS EN EL
SISTEMA (EN P.U.) ANTE HUECO DE TENSIÓN DE REE.
En ese punto crítico vemos como la velocidad de la turbina, y también del rotor del generador,
empieza a incrementarse rápidamente, acercándose hasta 1.3 p.u. Esto se produce por la caída de par
electromagnético que estaba aportando la red antes del hueco de tensión, que se oponía al movimiento
(par mecánico) del rotor del generador. El control de ángulo de Pitch de las palas intenta evitar este
incremento de la velocidad y por eso vemos que consigue reducirla en parte, aunque durante el período
de recuperación del sistema se puede ver como continua oscilando hasta el momento que la tensión
alcanzar el valor de 0.95 p.u., a partir del cual la velocidad tiende a estabilizarse en 1.2 p.u.
5.6.5 Pares del sistema.
Observamos en la Figura 5.39 que en las distintas gráficas de Par Mecánico los modelos de 2
y 3 masas tienen comportamientos muy similares y mucho más oscilantes que el de 1 masa, mientras
que en la gráfica del par electromagnético apenas encontramos diferencias en el comportamiento de
los modelos y se aprecian notables pero muy breves oscilaciones en comparación con los transitorios
de pares mecánicos. Vemos, además, que en los modelos de 2 y 3 masas las curvas de par mecánico
transmitido en los ejes cruzan varias veces el cero, lo que significa que se produce un cambio en el
sentido del momento de fuerzas, con el peligro que esto conlleva debido a las fuertes torsiones a las
que se someten los ejes.

112
FIGURA 5.39 COMPARACIÓN DE LOS DIFERENTES PARES QUE INTERVIENEN EN EL MODELO DE LA
TURBINA EÓLICA (EN P.U.) ANTE HUECO DE TENSIÓN DE REE.
La parte positiva es que, pese a que cuando se produce el hueco de tensión el par tiende a
volverse negativo, al cabo de un segundo, al producirse la recuperación parcial del sistema, el par
mejora notablemente. Aunque continua, como decíamos, con un transitorio oscilante de frecuencia
considerablemente alta para ser un par mecánico (en los modelos de dos y tres masas, ya que el modelo
de 1 masa no oscila nada y se pierde información muy valiosa). Es a partir de la recuperación casi total
del sistema (con U=0.95 p.u.) cuando se observa una clara tendencia hacia un punto de funcionamiento
estable, produciéndose menos sobreoscilación en los modelos de 2 y 3 masas que el de 1 masa, que
ahora sí oscila suavemente hasta estabilizarse completamente el sistema.
5.6.6 Ángulo de Pitch.
Como ya se ha comentado anteriormente, el movimiento de las palas se realiza con el
propósito de que la turbina no se acelere incontroladamente y se mantenga en un punto de
funcionamiento estable. Así, el ángulo de Pitch aumentará durante el intervalo de tiempo que se ha
producido el hueco de tensión, para desaprovechar cierta energía cinética del viento que haría que la
turbina se embalase en exceso.

113
FIGURA 5.40 COMPARACIÓN DEL ÁNGULO DE PITCH DE LAS PALAS DEL AEROGENERADOR (EN
GRADOS) ANTE HUECO DE TENSIÓN DE REE.
Con el aumento de la tensión hasta 0.8 p.u., se puede observar que el ángulo de paso de las
palas vuelve a reducirse, al recuperarse parte del par electromagnético que se oponía al movimiento,
porque el control considera que ya no es necesario desperdiciar más par eólico. Pero durante ese
tiempo el valor del ángulo de Pitch oscila en torno a 7 y 10 grados, hasta que se recupera casi en su
totalidad la tensión de la red y consigo lo hace también el ángulo de paso tras unos segundos de
oscilación (valor de sobreoscilación del orden del 50%), de forma parecida a como ocurría en el resto
de magnitudes.
5.7 Hueco de tensión límite. Velocidad y tiempo críticos de
disparo.
En este apartado vamos a comprobar el comportamiento de nuestro aerogenerador ante una
situación límite, disminuyendo la tensión hasta 0.0 p.u. (simulando un cortocircuito), y veremos si el
sistema deja de ser estable y la máquina termina perdiendo el sincronismo con la red. Volveremos a
comparar los distintos modelos mecánicos y analizar su comportamiento ante esta perturbación en las
tensiones de la red.

114
La Figura 5.41 muestra el esquema eléctrico básico del generador de inducción doblemente
alimentado de una turbina eólica conectado a la red de distribución de energía eléctrica.
FIGURA 5.41 ESQUEMA DE UNA MÁQUINA DE INDUCCIÓN DOBLEMENTE ALIMENTADA
CONECTADA A LA RED ELÉCTRICA.
En la Figura 5.42 se muestra el correspondiente modelo de circuito equivalente, en el que 𝑠 =
1 −𝛺
𝛺𝑆 es el deslizamiento correspondiente a la velocidad angular de funcionamiento considerada Ω,
y ΩS es la velocidad de sincronismo, 𝑍𝑆 = 𝑅𝑆 + 𝑗𝑋𝑆 es la impedancia del estátor (resistencia y
reactancia de dispersión del devanado estatórico), 𝑌𝑚 = 𝐺𝐹𝑒 + 𝑗𝐵𝑚 es la admitancia de la rama de
magnetización (conductancia de pérdidas en el hierro y susceptancia de magnetización, inversas de la
resistencia de pérdidas en el hierro, RFe, y la reactancia de magnetización, Xm, respectivamente), y
𝑍𝑅(𝑠) = 𝑅𝑅′ /𝑠 + 𝑗𝑋𝑅
′ es la impedancia del rotor (resistencia rotórica efectiva y reactancia rotórica).

115
FIGURA 5.42 CIRCUITO EQUIVALENTE MONOFÁSICO EXACTO DE UNA MÁQUINA DE INDUCCIÓN
DOBLEMENTE ALIMENTADA EN RÉGIMEN PERMANENTE CONECTADA A LA RED ELÉCTRICA.
Todas las magnitudes están referidas al estátor. Siendo 𝑎 =𝑁𝑆
𝑁𝑅, la relación de transformación
(NS, número de espiras del estátor, y NR, número de espiras del rotor):
𝑈1 = 𝑎𝑈2, siendo U2 la f.e.m. inducida en los devanados del rotor con la misma frecuencia
que la tensión del estátor (síncrona).
𝐼𝑅′ =
𝐼𝑅
𝑎
𝑋𝑅′ = 𝑎2𝑋𝑅 , donde 𝑋𝑅 = 2𝜋𝑓𝑙𝑅 es la reactancia de dispersión del devanado rotórico a la
frecuencia síncrona, siendo LR la inductancia de dispersión del rotor.
𝑅𝑅′
𝑠= 𝑎2
𝑅𝑅
𝑠, siendo RR la resistencia Joule del devanado rotórico.
𝑈𝑅′
𝑠= 𝑎
𝑈𝑅
𝑠, es la tensión del rotor referida al lado del estátor.
Todas las magnitudes tratadas en este capítulo son fasoriales. Observando la malla rotórica de
la Figura 5.42 se cumple [30]:
𝑈1 = 𝑈𝑚 = 𝑎𝑈2 = 𝐼𝑅′ · (
𝑅𝑅′
𝑠+ 𝑗𝑋𝑅
′ ) +𝑈𝑅′
𝑠
Y las ecuaciones de las tensiones estatórica y rotórica (despreciando las pérdidas del hierro)
serán:
𝑈𝑆 = 𝑅𝑆𝐼𝑆 + 𝑗𝑋𝑆𝐼𝑆 + 𝑗𝑋𝑀𝐼𝑀
𝑈𝑅′
𝑠= −
𝑅𝑅′
𝑠𝐼𝑅′ − 𝑗𝑋𝑅
′ 𝐼𝑅′ + 𝑗𝑋𝑀𝐼𝑀

116
Obtendremos el equivalente Thevenin, de la misma forma que [24], pero con la diferencia de
que en este caso se está utilizando una máquina de inducción doblemente alimentada. El equivalente
Thevenin se calculará con el circuito visto desde el conjunto formado por la resistencia rotórica
efectiva 𝑅𝑅′
𝑠 y la fuente de tensión de valor
𝑈𝑅′
𝑠, es el mostrado en la Figura 5.43:
FIGURA 5.43 CIRCUITO EQUIVALENTE THEVENIN DE UNA MÁQUINA DE INDUCCIÓN DOBLEMENTE
ALIMENTADA CONECTADA A LA RED ELÉCTRICA.
En este circuito, los parámetros que influyen en el cálculo del equivalente Thevenin son:
𝑍𝑆 = 𝑅𝑆 + 𝑗𝑋𝑆 =1
𝑌𝑆
𝑌𝑚 = 𝐺𝐹𝑒 + 𝑗𝐵𝑚 =1
𝑅𝐹𝑒+1
𝑗𝑋𝑚
𝑍𝑅′ =
𝑅𝑅′
𝑠+ 𝑗𝑋𝑅
′
La impedancia Thevenin vendrá dada por:
𝑍𝑇𝐻 = 𝑅𝑇𝐻 + 𝑗𝑋𝑇𝐻 = 𝑗𝑋𝑅′ +
1
𝑌𝑚 + 𝑌𝑆= 𝑗𝑋𝑅
′ +𝑍𝑆
𝑌𝑚𝑍𝑆 + 1= 𝑗𝑋𝑅
′ +𝑍𝑆𝑍𝑚𝑍𝑆 + 𝑍𝑚
Y la tensión UTH:

117
𝑈𝑇𝐻 =𝑍𝑆𝑍𝑚𝑍𝑆 + 𝑍𝑚
𝑈𝑆 =𝑍𝑆
𝑌𝑚𝑍𝑆 + 1𝑈𝑆 =
1
𝑌𝑚 + 𝑌𝑆𝑈𝑆
Es común encontrarnos en las máquinas eléctricas que la resistencia estatórica sea mucho
menor que la reactancia de dispersión del estátor, lo que nos permitiría hacer la siguiente
aproximación:
𝑍𝑆 = 𝑅𝑆 + 𝑗𝑋𝑆 ≃ 𝑗𝑋𝑆
Además, también se suelen despreciar las pérdidas en el hierro y así prescindir de la rama de
RFe, como haremos en este cálculo para mayor simplicidad, con lo que podríamos decir que:
𝑌𝑚 = 𝐺𝐹𝑒 + 𝑗𝐵𝑚 =1
𝑅𝐹𝑒+1
𝑗𝑋𝑚≃1
𝑗𝑋𝑚= 𝑗𝐵𝑚
Utilizando el modelo equivalente Thevenin, la intensidad rotórica resulta:
𝐼𝑅′ =
𝑈𝑇𝐻 −𝑈𝑅′
𝑠
𝑍𝑇𝐻 +𝑅𝑅′
𝑠
=𝑈𝑇𝐻 −
𝑈𝑅′
𝑠
(𝑅𝑇𝐻 +𝑅𝑅′
𝑠 ) + 𝑗𝑋𝑇𝐻
El par nos queda, por tanto, como sigue:
𝑇𝑒𝑚 =3
Ω𝑠(𝑅𝑅′
𝑠𝐼𝑅′2(𝑠) + 𝑅𝑒 {
𝑈𝑅′
𝑠𝐼𝑅′∗(𝑠)})
Podríamos también expresar la fuente 𝑈𝑅′
𝑠 como una caída de tensión en una impedancia,
𝑍𝑒𝑞
𝑠=
𝑅𝑒𝑞
𝑠+ 𝑗
𝑋𝑒𝑞
𝑠 atravesada por 𝐼𝑅
′ y, de esa forma, agrupar las resistencias de forma que cada elemento se
asimile a un flujo de potencia. Si separamos la resistencia rotórica en dos términos:
𝑅𝑅′
𝑠= 𝑅𝑅
′ +(1 − 𝑠)
𝑠𝑅𝑅′
Y hacemos lo mismo con la resistencia equivalente:
𝑅𝑒𝑞′
𝑠= 𝑅𝑒𝑞
′ +(1 − 𝑠)
𝑠𝑅𝑒𝑞′
Nos queda un circuito equivalente que se muestra junto con los siguientes balances [13]:

118
FIGURA 5.44 BALANCE DE POTENCIAS DE UN DFIG EN MODO SUPERSÍNCRONO, ASIMILANDO
CADA TÉRMINO A UN FLUJO DE POTENCIA.
FIGURA 5.45 BALANCE DE POTENCIAS DE UN DFIG EN MODO SUBSÍNCRONO, ASIMILANDO CADA
TÉRMINO A UN FLUJO DE POTENCIA.
Donde Pm es la potencia mecánica en el eje del generador que se asocia al término
(1−𝑠)
𝑠(𝑅𝑅′ + 𝑅𝑒𝑞
′ ), Pr es la potencia del rotor representada por la resistencia Req, Pcu,r se asocian con las
pérdidas en el cobre del rotor, Pcu,s son las pérdidas en el cobre del estátor, Pag es la potencia del
entrehierro (del inglés, air gap), y Ps es la potencia entregada por el estátor.
𝑃𝑚 = 3(1−𝑠)
𝑠(𝑅𝑅′ +𝑅𝑒𝑞
′ )𝐼𝑅′2
𝑃𝑟 = 3(𝑅𝑒𝑞)𝐼𝑅′2
𝑃𝑐𝑢,𝑟 = 3(𝑅𝑅′ )𝐼𝑅
′2
𝑃𝑎𝑔 =3
𝑠(𝑅𝑅′ +𝑅𝑒𝑞
′ )𝐼𝑅′2 = 𝑇𝑒𝑚𝜔𝑠
𝑃𝑐𝑢,𝑠 = 3(𝑅𝑅′ )𝐼𝑠
2
𝑃𝑠 = 3𝑅𝑒{𝑈𝑠𝐼𝑠∗}

119
Es interesante ver el comportamiento de la resistencia equivalente del RSC, que se modela
según el sentido del flujo de potencia en el rotor de la máquina. Cuando funciona en modo
supersíncrono (Figura 5.44), la Req es mayor que 0 y se inyecta potencia a la red por el circuito rotórico.
Mientras que, si el generador está en modo subsíncrono (Figura 5.45), la Req es negativa y el rotor
absorbe potencia de la red.
Por tanto, el balance de potencia total generada quedará:
|𝑃𝑔| = |𝑃𝑠| + |𝑃𝑟| ⇒ 𝑒𝑛 𝑚𝑜𝑑𝑜 𝑠𝑢𝑝𝑒𝑟𝑠í𝑛𝑐𝑟𝑜𝑛𝑜
|𝑃𝑔| = |𝑃𝑠| − |𝑃𝑟| ⇒ 𝑒𝑛 𝑚𝑜𝑑𝑜 𝑠𝑢𝑏𝑠í𝑛𝑐𝑟𝑜𝑛𝑜
Utilizando la impedancia equivalente en lugar de la fuente de tensión 𝑈𝑅′
𝑠, nos queda el
siguiente circuito Thevenin (ahora en bornes de la resistencia rotórica y de la impedancia equivalente
del RSC):
FIGURA 5.46 CIRCUITO EQUIVALENTE THEVENIN, UTILIZANDO UNA IMPEDANCIA EQUIVALENTE
PARA EL RSC, DE UNA MÁQUINA DE INDUCCIÓN DOBLEMENTE ALIMENTADA CONECTADA A LA
RED ELÉCTRICA.
Siendo la impedancia y la fuente de tensión equivalentes del Thevenin las mismas que en el
circuito de la Figura 5.43. Sin embargo, el valor de la intensidad rotórica será en este caso:
𝐼𝑅′ =
𝑈𝑇𝐻
𝑍𝑇𝐻 +𝑅𝑅′
𝑠 +𝑅𝑒𝑞′
𝑠 + 𝑗𝑋𝑒𝑞′
𝑠
=𝑈𝑇𝐻
(𝑅𝑇𝐻 +𝑅𝑅′
𝑠 +𝑅𝑒𝑞′
𝑠 ) + 𝑗 (𝑋𝑇𝐻 +𝑋𝑒𝑞′
𝑠 )

120
Con todo esto, podemos obtener el valor del par electromagnético (en N·m) según la
expresión:
𝑇𝑒𝑚 =𝑃𝑚Ω𝑚
= 3(1 − 𝑠)
𝑠Ω𝑚
Ω𝑠Ω𝑠(𝑅𝑅′ + 𝑅𝑒𝑞
′ )|𝐼𝑅′ |2 =
3
𝑠Ω𝑠(𝑅𝑅′ + 𝑅𝑒𝑞
′ )|𝐼𝑅′ |2 =
𝑃𝑎𝑔
Ω𝑠
Por tanto, procedemos a resolver el circuito equivalente y calcular sus magnitudes fasoriales,
para, de esa forma, obtener el valor de las impedancias, tensiones e intensidades necesarias (todas ellas
en unidades del SI, utilizo: 𝑍𝑏 =𝑈𝑛,𝑠2
𝑆𝑛=
(575)2
1.5·106/0.9= 0.198375):
𝑍𝑠 = (0.023 + 0.18𝑗)𝑍𝑏 = 𝑅𝑠 + 𝑗𝑋𝑠 = 0.00456 + 0.0357𝑗 Ω
𝑍𝑚 ≃ (2.9𝑗)𝑍𝑏 = 𝑗𝑋𝑚 = 0.5753𝑗 Ω
𝑍𝑅′ = (0.016 + 0.16𝑗)𝑍𝑏 = 𝑅𝑅
′ + 𝑗𝑋𝑅′ = 0.003174 + 0.03174𝑗 Ω
𝑍𝑇𝐻 = 𝑅𝑇𝐻 + 𝑗𝑋𝑇𝐻 = 𝑗𝑋𝑅′ +
𝑍𝑆𝑍𝑚𝑍𝑆 + 𝑍𝑚
= 0.03578 + 0.033644𝑗 Ω
𝑈𝑇𝐻 =𝑍𝑚
𝑍𝑆 + 𝑍𝑚𝑈𝑆 = (0.941568 + 0.007027𝑗) · 340.2758 = 320.385
∠0.4276˚ 𝑉
Donde 𝑈𝑆 = 1.025 𝑝. 𝑢. con el fasor de referencia 0˚, y en voltios 𝑈𝑆 = 1.025 ·575
√3=
340.2758 𝑉. De la potencia del entrehierro podemos obtener la intensidad del estátor (en módulo):
𝑃𝑎𝑔 = 3(𝑈𝑠 − 𝐼𝑠𝑅𝑠)𝐼𝑠 = 𝑇𝑚𝜔𝑆 ⇒𝑅𝑠𝐼𝑠
2 − 𝑈𝑠𝐼𝑠 +𝑇𝑚𝜔𝑆3
|𝐼𝑠| =−𝑈𝑠 ±√𝑈𝑠2 −
43𝑅𝑠𝑇𝑚𝜔𝑆
2𝑅𝑠
Para una velocidad del viento dada (𝑣𝑤𝑖𝑛𝑑 = 12 𝑚/𝑠), el par mecánico introducido en el rotor
del generador es (obtenido de simulación con Matlab-Simulink, y siendo el par base 𝑇𝑏 =𝑃𝑏
𝜔𝑏=
1.5·106
2𝜋60
3
= 11936.62 𝑁 · 𝑚):
𝑇𝑚 = −0.7203 𝑝. 𝑢.= −8594.3664 𝑁 · 𝑚
El cual es negativo (significa que se introduce en el rotor) porque la máquina eléctrica
utilizada está modelada como motor. Además, la tensión es la del punto de conexión a la red (estátor)
antes expuesta, y el deslizamiento correspondiente a este punto de funcionamiento es (velocidad del
rotor, 𝜔𝑚 = 1.1992 𝑝. 𝑢.):

121
𝑠 = −0.1992
El módulo de la intensidad del estátor será, por tanto:
|𝐼𝑠| = 1043.376589 𝐴
La otra solución (|𝐼𝑠| = −75665.26 𝐴) se ha omitido. Y la intensidad fasorial será:
𝐼𝑠 = −1043.376589 = 1043.376589∠180˚ 𝐴
El signo negativo se debe a que se considera que la máquina está funcionando como
generador, con control de reactiva para mantenerla en valor nulo, cos𝜑 = −1 (por tanto, está
desfasada 180˚ respecto a Us). Continuamos despejando magnitudes:
𝑈𝑚 = 𝑈𝑠 − 𝐼𝑠(𝑅𝑠 + 𝑗𝑋𝑠) = 338.7881∠6.312˚ 𝑉
𝐼𝑚 =𝑈𝑚𝑗𝑋𝑚
= 588.88945∠−83.68777˚ 𝐴
𝐼𝑅′ = 𝐼𝑠 − 𝐼𝑚 = 1253.21
∠152.15663˚ 𝐴
𝑈𝑅′
𝑠= 𝑈𝑚 − 𝐼𝑅
′ (𝑅𝑅′
𝑠+ 𝑗𝑋𝑅
′ ) ⇒𝑈𝑅
′ = 𝑠 · 𝑈𝑚 − 𝐼𝑅′ (𝑅𝑅
′ + 𝑠 · 𝑗𝑋𝑅′ )
= 𝑠 · 338.7881∠6.312˚ − 8.8659∠88.8136˚ 𝑉
Por tanto, podemos obtener la impedancia equivalente como:
𝑈𝑅′ /𝑠
𝐼𝑅′ =
𝑅𝑒𝑞′
𝑠+ 𝑗𝑋𝑒𝑞′
𝑠
⇒𝑈𝑅′
𝐼𝑅′ = 𝑍𝑒𝑞
′ = 𝑅𝑒𝑞′ + 𝑗𝑋𝑒𝑞
′ =−0.1992 · 338.7881∠6.312˚ − 8.8659∠88.8136˚
1253.21∠152.15663˚
= 0.041389 + 0.036557𝑗 Ω
De donde:
𝑅𝑒𝑞′ = 0.0413956 Ω
𝑋𝑒𝑞′ = 0.0365627 Ω
Con todo esto, el par electromagnético vendrá dado por:

122
𝑇𝑒𝑚 =3
𝑠Ω𝑠(𝑅𝑅′ + 𝑅𝑒𝑞
′ ) |𝑈𝑇𝐻
(𝑅𝑇𝐻 +𝑅𝑅′
𝑠+𝑅𝑒𝑞′
𝑠) + 𝑗 (𝑋𝑇𝐻 +
𝑋𝑒𝑞′
𝑠)
|
2
=3
𝑠 ·2𝜋603
(0.003174 + 𝑅𝑒{𝑍𝑒𝑞′ })
·|320.385∠0.4276˚|
2
|(0.03578 +0.003174
𝑠 +0.0413956
𝑠 ) + 𝑗 (0.033644 +0.0365627
𝑠 )|2
=0.023873
𝑠· (0.003174 + 0.0413956) · (
320.3852
(𝑎)2 + (𝑏)2)
Donde:
𝑎 = 0.03578 +0.003174
𝑠+0.0413956
𝑠
𝑏 = 0.033644 +0.0365627
𝑠
En el esquema de la Figura 5.43 se podría incorporar el efecto de las impedancias de la línea
de alimentación, ZL, o la impedancia de cortocircuito del sistema de potencia, ZSP (o del transformador
de la turbina o subestación). Para ello basta sumar las correspondientes impedancias con la estatórica
del DFIG, y ésta se sustituiría en las ecuaciones por la que llamaremos Z1:
𝑍1 = 𝑅1 + 𝑗𝑋1 = 𝑍𝑆 + 𝑍𝐿 + 𝑍𝑆𝑃 = 𝑅𝑆 + 𝑅𝐿 + 𝑅𝑆𝑃 + 𝑗(𝑋𝑆 + 𝑋𝐿 +𝑋𝑆𝑃)
Por otra parte, el par mecánico transmitido al rotor del generador, Tm, para una determinada
velocidad del viento, v, puede obtenerse a partir de la curva característica de potencia-velocidad de la
turbina, Pm (v), mediante la expresión:
𝑇𝑚(𝑠) = 𝑇𝑚(Ω(𝑠)) =𝑃𝑚(𝑣)
Ω(𝑠)=
𝑃𝑚(𝑣)
Ω𝑆(1 − 𝑠)
Donde 𝑃𝑚(𝑣) es la potencia entregada por la turbina eólica, la cual depende lógicamente de
la velocidad del viento, así como de otros factores, como el ángulo de Pitch de las palas, que
despreciaremos.

123
Además, por la segunda ley de Newton aplicada en el eje de la máquina, considerando rígido
el sistema de transmisión mecánico (Modelo de 1 masa), y el modo de actuación como motor:
𝑇𝑒𝑚(Ω) = 𝑇𝑚(Ω) + 2𝐻𝑑Ω
𝑑𝑡+ 𝐷Ω
Donde H es la inercia normalizada (en segundos) de todas las partes en rotación agregadas, a
saber, palas, buje, eje de baja velocidad, multiplicadora, eje de alta velocidad y rotor del generador;
Te es el par electromagnético en p.u.; Tm el par mecánico aplicado al conjunto que actúa como sólido
rígido; y, por último, Ω es la velocidad angular del sistema.
En régimen permanente, la velocidad del rotor será constante, Ω, y, por tanto, la derivada
respecto al tiempo se anulará, por lo que el par mecánico motor neto (si despreciamos las pérdidas por
rozamiento) será igual al par electromagnético resistente del generador, quedando una ecuación de
equilibrio de pares:
𝑇𝑒𝑚(Ω) = 𝑇𝑚(Ω) + 𝐷Ω ≃ 𝑇𝑚(Ω)
La Figura 5.47 muestra que, para una velocidad de viento cualquiera, hay dos puntos de
funcionamiento posibles: uno estable, en la zona lineal de (pendiente negativa) de la característica de
par electromagnético, y otro inestable, en la zona hiperbólica (pendiente positiva). En el primero de
ellos (estable) la velocidad rotórica de funcionamiento, Ω0, es ligeramente mayor a la de sincronismo
(Ω0 > Ω𝑆), pero muy próxima, por lo que el deslizamiento, s0, es muy pequeño, casi nulo, en valor
absoluto (𝑠𝐶 < 0, 𝑠𝐶 ≈ 0). En el segundo (punto crítico) la velocidad rotórica, ΩC, ya es bastante
mayor que la de sincronismo (Ω𝐶 ≫ Ω𝑆 ) y el deslizamiento, sC, en valor absoluto, ya no puede
considerarse casi nulo (𝑠𝐶 < 0, 𝑠𝐶 ≪ 0)).

124
FIGURA 5.47 VARIACIÓN DEL PAR ELECTROMAGNÉTICO (PAR RESISTENTE) Y DEL PAR
MECÁNICO (PAR MOTOR) PRODUCIDO POR LA TURBINA FRENTE A LA VELOCIDAD ROTÓRICA EN
UNA MÁQUINA ASÍNCRONA.
Para una determinada velocidad de viento, v, el aerogenerador funciona en el punto estable,
A, con velocidad muy próxima (ligeramente por encima) a la de sincronismo. En este punto, el
generador funciona con un par electromagnético interno (resistente), 𝑇𝑒(𝑠0) que será igual al par
mecánico (motor) capturado por la turbina eólica, 𝑇𝑚(𝑠0) =𝑃𝑚(𝑣)
Ω𝑆(1−𝑠0), si despreciamos las pérdidas por
fricción.
Si, funcionando en esas condiciones de régimen permanente, se produce una falta trifásica en
la red, el par electromagnético interno (par resistente) se anula muy rápidamente, por lo que la máquina
empieza a acelerar bajo la acción del par mecánico motor 𝑇𝑚(𝑠(𝜔)) = 2𝐻𝑑𝜔
𝑑𝑡> 0. Si la falta se
despeja rápidamente, la máquina desacelera y la velocidad del rotor vuelve a recuperar su valor inicial.
Por el contrario, si la falta dura más del tiempo crítico de disparo, tC, la velocidad sigue subiendo, por
lo que el sistema se hace inestable.
La Figura 5.47 nos permite hacer una interpretación gráfica de este fenómeno para mejor
comprensión. Cuando, funcionando el aerogenerador en condiciones de régimen permanente, se
produce la falta trifásica en la red, el par electromagnético se anula rápidamente, como hemos dicho

125
antes, siguiendo en la gráfica una trayectoria desde el punto A al B. Si el par mecánico motor no se
anula, hace que la máquina se empiece a acelerar (en la gráfica se avanza por la trayectoria B-C), y
pueden ocurrir dos cosas.
En primer lugar, si la falta se despeja rápidamente (antes de llegar a lo que consideramos
como tiempo crítico de disparo, tC) el par electromagnético recuperará el valor correspondiente a la
velocidad en la que se ha producido el despeje de la falta (punto D de la figura). Al ser ese valor
superior en módulo al del par mecánico, se producirá un par de frenado neto que hace que el rotor
desacelere y su velocidad vuelva al punto de funcionamiento estable en el que se encontraba antes de
la falta (trayecto D-A).
Por el contrario, si volvemos al punto C con la máquina acelerándose debido al par motor neto
durante la falta, puede ocurrir que las protecciones no la despejen antes del tiempo crítico, con lo que
sobrepasaríamos el valor límite de la velocidad del rotor (Ω > Ω𝐶), equivalente a seguir el trayecto B-
C-E. En este caso, el valor del par electromagnético que se opone al movimiento del rotor es ahora
menor en módulo que el par mecánico, lo que nos lleva a una situación inestable (trayecto E-F-∞), ya
que no recupera su situación inicial antes de la perturbación.
Para hallar las dos posibles velocidades de funcionamiento en régimen permanente (cuando
se anulan par mecánico y electromagnético), o sus correspondientes deslizamientos, pueden obtenerse
imponiendo la igualdad entre ambos pares y considerando las pérdidas por fricción:
𝑇𝑒(Ω) = 3(𝑅𝑅′ + 𝑅𝑒𝑞
′ )
𝑠(Ω) · Ω𝑆|
𝑈𝑇𝐻
(𝑅𝑇𝐻 +𝑅𝑅′
𝑠(Ω)+𝑅𝑒𝑞′
𝑠(Ω)) + 𝑗 (𝑋𝑇𝐻 +
𝑋𝑒𝑞′
𝑠(Ω))
|
2
= 𝑇𝑚(Ω) + 𝐷Ω =𝑃𝑚(𝑣)
Ω+ 𝐷Ω
La expresión anterior, con las magnitudes en p.u., nos queda:
𝑇𝑒(Ω) =(𝑅𝑅′ +𝑅𝑒𝑞
′ )
𝑠(Ω)|
𝑈𝑇𝐻
(𝑅𝑇𝐻 +𝑅𝑅′
𝑠(Ω)+𝑅𝑒𝑞′
𝑠(Ω)) + 𝑗 (𝑋𝑇𝐻 +
𝑋𝑒𝑞′
𝑠(Ω))
|
2
= 𝑇𝑚(Ω) + 𝐷Ω =𝑃𝑚(𝑣)
ΩΩ𝑆
+ 𝐷Ω
Ω𝑆
𝑇𝑒(s) =(𝑅𝑅′ + 𝑅𝑒𝑞
′ )
𝑠·
|𝑈𝑇𝐻|2
(𝑅𝑇𝐻 +𝑅𝑅′
𝑠 +𝑅𝑒𝑞′
𝑠 )2
+ (𝑋𝑇𝐻 +𝑋𝑒𝑞′
𝑠 )2 =
𝑃𝑚(𝑣)
(1 − s)+ 𝐷(1 − s)
Si despreciamos el término de pérdidas por rozamiento puede obtenerse la siguiente ecuación
analítica:
𝑇𝑒(s) =(𝑅𝑅′ + 𝑅𝑒𝑞
′ )
𝑠·
|𝑈𝑇𝐻|2
(𝑅𝑇𝐻 +𝑅𝑅′
𝑠 +𝑅𝑒𝑞′
𝑠 )2
+ (𝑋𝑇𝐻 +𝑋𝑒𝑞′
𝑠 )2 ≃
𝑃𝑚(𝑣)
(1 − s)= 𝑇𝑚(s)

126
𝑠 · 𝑃𝑚(𝑣) · ((𝑠 · 𝑅𝑇𝐻 + 𝑅𝑅′ + 𝑅𝑒𝑞
′ )2+ (𝑠 · 𝑋𝑇𝐻 + 𝑋𝑒𝑞
′ )2) = (𝑅𝑅
′ + 𝑅𝑒𝑞′ ) · (𝑈𝑇𝐻)
2 · 𝑠2(1 − s)
Resolviendo esta ecuación podemos obtener los valores de s para los que se igualan los pares,
es decir, los puntos de funcionamiento de nuestro aerogenerador, y de esa forma, poder obtener el
valor crítico del deslizamiento (en relación al tiempo crítico de disparo de las protecciones), a partir
del cual el sistema deja de ser estable.

127
Capítulo 6
CONCLUSIONES
6.1 Introducción
A lo largo del trabajo hemos desmenuzado todas y cada una de las partes de las que está
formado un aerogenerador. Se han visto diferentes tipos de máquinas eléctricas y tecnologías,
analizando sus cualidades y desventajas a la hora de elegir una u otra. Se han expuesto con claridad
las numerosas ventajas que posee el generador de inducción doblemente alimentado (DFIG) frente
a su simple y robusto predecesor, el generador de inducción de jaula de ardilla, e incluso frente a
otras clases de máquinas como las síncronas de imanes permanentes. En estos últimos, algunos
modelos han llegado incluso a prescindir de la caja multiplicadora, pero el alto número de polos, que
incurre en un tamaño desproporcionado de la máquina, y su elevado coste hacen que la opción más
ventajosa y con mayor fiabilidad, estabilidad y eficiencia sea escoger el DFIG.
Además, se han desarrollado las ecuaciones de la máquina eléctrica de inducción de forma
genérica, y se han trasladado a unos ejes rotatorios qd0 (mediante la transformada de Park) que
facilitan el estudio de las magnitudes variantes con el tiempo. Asimismo, al encontrarse las tensiones
e intensidades expresadas en referencia a estos ejes, resulta mucho más sencillo analizar el
comportamiento de los convertidores, ya que podemos desacoplar las componentes de la intensidad
rotórica y, con ello, controlar los flujos de potencia activa y reactiva inyectadas o absorbidas con la
red. También se ha podido explicar una de las grandes ventajas de esta máquina doblemente
alimentada, y es que, no sólo genera energía funcionando en modo supersíncrono como hace el
generador asíncrono convencional, sino que, además, puede estar funcionando por debajo de la
velocidad de sincronismo, y ser capaz de inyectar potencia a la red gracias a la actuación de los
convertidores electrónicos sobre las intensidades del circuito rotórico.
6.2 Modelos multimasas y modelos concentrados
Una vez expuestas todas las ecuaciones eléctricas junto con la de movimiento del rotor, hemos
partido de un modelo de 3 masas para realizar las simulaciones en Matlab-Simulink.
Con el fin de analizar con exactitud la influencia de la rigidez de las palas y el eje y las inercias
de los distintos componentes del accionamiento mecánico de un aerogenerador en la respuesta
transitoria del sistema, se ha realizado una comparación del comportamiento transitorio del
aerogenerador utilizando modelos de accionamiento mecánico de tres, dos y una masa.

128
Se ha podido apreciar, con un estudio detallado ante perturbaciones en la velocidad del viento,
que el modelo de dos masas en el que hemos despreciado la inercia y el amortiguamiento propio del
buje aporta unos resultados ante dicha perturbación mucho más similares al modelo de 3 masas del
que partía, sólo difiriendo de éste con un error minúsculo, debido prácticamente a la diferencia total
de inercias entre ambos. También es necesario recordar que era bastante acertado el modelo de dos
masas en el que se despreciaba la rama de elasticidad y amortiguamiento mutuos, esto es, asumiendo
que la unión palas-buje es totalmente rígida. Por último, el modelo de una masa sí difería bastante con
respecto a los anteriores, además de hacernos perder una gran cantidad de información sumamente
valiosa. No obstante, y siempre teniendo en cuenta que la precisión no es del todo óptima, este es un
modelo tremendamente útil por su sencillez ya que en él aparecen todos los parámetros mecánicos del
sistema concentrados, y nos puede servir como una primera aproximación bastante aceptable del
sistema, con la ventaja de que tiene un reducido tiempo computacional.
6.3 Estabilidad transitoria
Estos modelos se han seguido comparando para diferentes entradas, ya fuesen de tipo escalón
o pulsantes, asemejándose a ráfagas de viento. Se ha confirmado la precisión en los resultados del
modelo de dos masas elegido, calcando prácticamente en todos los casos a la respuesta dada por el
sistema de 3 masas.
Uno de los objetivos marcados al inicio fue la comprobación de estabilidad del aerogenerador
ante un hueco de tensión en la red de alimentación, el cual ha sido descrito con la forma de onda y los
tiempos de falta requeridos por REE. Se han mostrado diferentes magnitudes de especial relevancia
para asegurarnos de que no se ha perdido la estabilidad tras el despeje de la falta.
Recordar que la potencia activa se redujo, como es lógico, durante el período de la falta, pero
el aerogenerador se mantuvo inyectando potencia a la red, sin caer en ningún momento hasta nivel
nulo. Además, se procedió a modificar algunos parámetros de control de los convertidores
(principalmente el límite de la componente q de la intensidad de referencia del RSC, 𝐼𝑞𝑟,𝑟𝑒𝑓), para, de
ese modo, aumentar la aportación de reactiva durante la falta. Esto es de vital importancia en estos
casos, ya que la inyección de potencia reactiva es de gran ayuda para la red, puesto que la tensión del
sistema eléctrico aumenta, lo que hace que se recupere antes de la caída. Este es un peligro más de los
generadores asíncronos comunes, ya que al no poseer control de reactiva, no sólo consumen gran
cantidad de energía en funcionamiento normal, sino que este consumo se incrementa más aún en
situaciones críticas como la comentada.
Se han encontrado las expresiones necesarias para poder hallar el valor del tiempo crítico de
disparo de las protecciones, apoyándonos en el circuito monofásico equivalente de la máquina

129
asíncrona y en el equivalente Thevenin del mismo, para poder conocer el valor de las magnitudes
necesarias.

130
REFERENCIAS
[1] Global Wind Energy Council, «http://www.gwec.net,» 2014. [En línea]. Available:
http://www.gwec.net/global-figures/graphs/.
[2] Asociación Empresarial Eólica, «www.aeeolica.org,» [En línea]. Available:
http://www.aeeolica.org/es/sobre-la-eolica/la-eolica-en-espana/generacion-eolica/. [Último
acceso: Septiembre 2015].
[3] J. C. Atienza, I. M. Fierro, O. Infante, J. Valls y J. Domínguez, «Directrices para la evaluación
del impacto de los parques eólicos en aves y murciélagos,» SEO/BirdLife, Madrid, 2012.
[4] M. Singh y S. Santoso, «Dynamic Models for Wind Turbines and Wind Power Plants,»
University of Texas, Austin, Texas, 2011.
[5] J. F. Funes Ruiz y R. C. Santiuste, Análisis simplificado de la respuesta estructural de una pala
de aerogenerador, Universidad Carlos III Madrid: Departamento de Mecánica de Medios
Continuos y Teoría de Estructuras, 2009.
[6] M. E. Montilla D'Jesús, «Control de Parques Eólicos Offshore conectados mediante enlace de
continua HVDC-LCC,» Tesis Doctoral, Departamento de Ingeniería Eléctrica, Universidad
Carlos III, Madrid, 2010.
[7] F. M. González-Longatt, «Modelación del Rotor de Turbinas de Viento en Simulación de
Sistemas de Potencia: Parte III,» Fuentes Alternas de Energía y Generación Distribuida, 2007.
[8] M. Franquesa Voneschen, Kleine Windräder: Berechnung u. Konstruktion, Wiesbaden; Berlin,
1989.
[9] A. G. Omar, M. A. Cooz y F. M. González-Longatt, «Aspectos Generales de Sistemas
Mecánicos en Turbina de Viento de Eje Horizontal,» 2011.
[10] F. M. González-Longatt, «Sistema Mecánico de Transmisión de Aerogeneradores de Eje
Horizontal,» Fuentes Alternas de Energía y Generación Distribuida, 2007.
[11] S. Sáenz Robles, J. M. Roldán Fernández y M. Burgos Payán, Modelos Agregados de Parques
Eólicos, Universidad de Sevilla: Departamento de Ingeniería Eléctrica, 2013.
[12] E. A. Sierra Jiménez y J. Romo López, «Análisis del diseño y control de un generador trifásico
doblemente alimentado,» Departamento de Ingeniería Eléctrica. Universidad de Chile,
Santiago de Chile, 2012.

131
[13] B. Wu, Y. Lang, N. Zargari y S. Kouro, Power Coversion and Control of Wind Energy Systems, L.
Hanzo, Ed., New Jersey: IEEE Press Editorial Board, 2011.
[14] P. C. Krause, O. Wasynczuk y S. D. Sudhoff, Analysis of Electric Machinery and Drive Systems,
2nd Edition ed., John Wiley and Sons, 2002.
[15] P. Kundur, Power system stability and control, New York: McGraw-Hill, 1994.
[16] F. González-Longatt, O. Amaya y M. Cooz, «Evaluación del Desempeño de una Turbina de
Viento con Generador de Inducción Doblemente Alimentado,» de I Congreso Venezolano de
Redes y Energía Eléctrica, 2007.
[17] V. Akhmatov, Induction generators for wind power, Paul & Co, 2007.
[18] L. Hansen, L. Helle, F. Blaabjerg, E. Ritchie, S. Munk-Nielsen, H. Bindner, P. Sørensen y B. Bak-
Jensen, «Conceptual survey of generators and power electronics for wind turbines,» technical
report, Roskilde, Denmark, 2001.
[19] S. Burnham y E. Muljadi, «Variable rotor-resistance control of wind turbine generators,» de
IEEE Power & Energy Society General Meeting, Calgary, AB, July 2009.
[20] S. Champan y Y. Man, Electric machinery fundamentals, McGraw-Hill, 1985.
[21] M. Singh y S. Santoso, «Electromechanical and Time-Domain Modeling of Wind Generators,»
de IEEE Power Engineering Society General Meeting, Tampa, FL, June 2007.
[22] R. Gagnon, «Wind Farm - DFIG Detailed Model,» Matlab-Simulink, 2014.
[23] N. W. Miller, J. J. Sanchez-Gasca, W. W. Price y R. W. Delmerico, «DYNAMIC MODELING OF GE
1.5 AND 3.6 MW WIND TURBINE-GENERATORS FOR STABILITY SIMULATIONS,» de GE Power
Systems Energy Consulting. IEEE WTG Modeling Panel, July 2003.
[24] J. M. Roldán Fernández y M. Burgos Payán, Modelos Dinámicos Reducidos de las Máquinas de
Inducción. Aplicación en Parques Eólicos, Universidad de Sevilla, Departamento de Ingeniería
Eléctrica: Proyecto Fin de Máster, 2011.
[25] S. M. Muyeen, J. Tamura y T. Murata, «Wind Turbine Modeling,» de Stability Augmentation of
a Grid-connected Wind Farm, Springer, 2009, pp. 23-65.
[26] F. M. González-Longatt, «Modelo de Sistemas de Turbinas de Viento Parte I: Rotor y Tren
Mecánico,» de II Congreso Iberoamericano de Estudiantes de Ingeniería Eléctrica II CIBELEC
2006, Puerto La Cruz, Venezuela, 2006.
[27] A. G. González Rodríguez, A. González Rodríguez y M. Burgos Payán, «Estimating Wind
Turbines Mechanical Constants».

132
[28] Acciona Windpower, «Technical Specifications AW 1500,» [En línea]. Available: www.acciona-
windpower.com. [Último acceso: Julio 2015].
[29] Ministerio de Industria, Turismo y Comercio. BOE Anexo, «P.O. 12.3 Requisitos de respuesta
frente a huecos de tensión de las instalaciones eólicas,» Red Eléctrica de España, Madrid, 4
de Octubre de 2006.
[30] A. B. Balasubram y A. Rajapalan, «Modelling, Simulation and Analysis of Doubly Fed Induction
Generator for Wind Turbines,» The Faculty of Electrical Engineering and Information
Technology of the Slovak University of Technology, Journal of Electrical Engineering, vol. 60,
nº 279-85, 2009.

133